Embed Size (px)
DESCRIPTION
Eduardo Ros and Javier Díaz. Dpto. Arquitectura y Tecnología de Computadores. Universidad de Granada. 4th Thematic PRISMA network meeting, Granada 11-12 February 2010.
Citation preview

High Performance image processing engines for
embedded systems
Eduardo Ros and Javier Díaz
Depto. Arquitectura y Tecnología de Computadores.Universidad de Granda
4th Thematic PRISMA network meeting, Granada 11-11 February 2010

Índice1. Presentación del grupo y proyectos2. Introducción: visión en tiempo real y
hardware reconfigurable.3. Proyectos EU Ecovision y DRIVSCO.4. Proyecto PIMA-Anafocus5. Sistemas de ayuda para baja visión6. Resumen y conclusiones

Grupo de investigación Departamento de Arquitectura y Tecnología de Computadores
ATC. 34 profesores más de 32 investigadores (contratados y becarios).
Líneas de investigación en supercomputación, sistemas empotrados, inteligencia artificial, Ingeniería biomédica, etc..
Grupo de sistemas empotrados y procesamiento de imágenes. Dirigido por Eduardo Ros Vidal. Más de 14 investigadores (profesores y
personal contratado)
Líneas de investigación en robótica bioinspirada, hardware reconfigurable (FPGAs), procesamiento en tiempo real, biomedicina, sistemas empotrados certificables, etc..
Proyectos nacionales (DINAMVISION, MULTIVISION, DEPROVI), Europeos del Programa Marco (SPIKEFORCE, ECOVISION, SENSOPAC, DRIVSCO) y colaboraciones con empresas (Telefónica I+D, Anafocus, Seven Solutions, etc..).

Proyectos I Proyectos Europeos del V y VI programa marco:
ECOVISION: Artificial Vision Systems based on early cognitive cortical processing (FP5-IST-2001-32114 ). (01-01-2002 hasta 30-12-2004)
DRIVSCO: Learning to emulate perception action cycles in a driving school scenario (FP6-IST- 016276-2). (01-02-2006 hasta 31-07-2009)
Proyectos nacionales CICYT: DEPROVI: Diseño de sistemas empotrados para procesamiento de visión en
tiempo real. Aplicaciones en medicina, vehículos y robots (DPI2004-07032) (13-12-2004 hasta 13-12-2007).
DINAMVISION: Sistema de visión dinámica en tiempo real y su aplicación en robótica, vehículos y biomedicina. (DPI2007-61683). (01-10-07 hasta 30-09-10).
Proyectos autonómicos (Excelencia) MULTIVISION: Sistema de visión en tiempo real multi-cámara para
interpretación de escenas (TIC-3873). (01-1-2009 hasta 31-12-2011). ITREBA: Procesamiento de Imagen/video en Tiempo Real para Exploración
Biomédica Activa (01-1-2010 hasta 31-12-2012).

Proyectos II Robótica bioinspirada proyectos EU V y VI programa SPIKEFORECE y
SENSOPAC (esté último en ejecución). Certificación de sistemas empotrados multicore RECOMP: Reduced
Certification Costs for Trusted Multi-core Platforms Proyecto EU VII programa marco: ARTEMIS (inicio Abril 2010).
Proyectos I+D con empresas PIMA ANAFOCUS: Migración de ADAS a la plataforma Eye-RIS de la
empresa Anafocus. eQUIROFANO TELEFONICA I+D: Entorno Colaborativo Multimedia (eQECM). ATICA TELEFONICA I+D: Arquitectura de Tecnologías de Comunicaciones
Inalámbricas para la mejora de la Calidad asistencial en la sanidad. Moria Kandor Graphics: Tecnología 3D para fusión de contenidos reales y
virtuales (en preparación)
Spin-off: Seven Solutions S.L. (http://www.sevensols.com) Diseño de sistemas empotrados a medida de altas prestaciones y Sistemas de
videovigilancia inteligente.

6
ActionAction
Real-time perception machine
Real-time perception machine
Target platformTarget platform
Active Vision
Visión en tiempo-real: Motivación Procesamiento en tiempo real
para experimentos con robots (“embodiment concept”)
Visión activa Pensando como ingeniero: Lo
entiendo cuando lo construyo. Sistemas de visión avanzados
para aplicaciones reales.
El trabajo en esta línea se ha financiado principalmente por los siguientes proyectos: ECOVISION: Artificial Vision Systems based on early
cognitive cortical processing.(2002-2004) DRIVSCO: Learning to emulate perception action
cycles in a driving school scenario. (2006-2009)

Tecnología
Procesamiento bioinspirado
SoCs Hardware reconfigurable (FPGAs) Metodologías de diseño de SoCs
Procesamiento paralelo (circuitos con más de 3268 unidades de cómputo) vs. Compartición de recursos.
Diseño de unidades de procesamiento con segmentación de cauce de grano fino y alto rendimiento (altas prestaciones a bajas frecuencias de reloj).
Particionamiento hardware-software. Técnicas de diseño de circuitos basadas en lenguajes de alto
nivel.

Proyectos Europeos
ECOVISION Y DRIVSCO

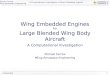
ECOVISIONVisión en tiempo real para monitorización de adelantamientos
Hardware FPGA. Seguimiento basado en flujo
óptico. Aplicaciones: angulo
muerto, distracciones durante maniobras de cambio de carril, etc..

Optical flow system Architecture

Superscalar/superpipelined

Overtaking car monitor architecture

ECOVISION
1-3 m/s1-3 m/s 5-10 m/s5-10 m/s 15-20 m/s15-20 m/s 25-30 m/s0
10
20
30
40
50
60
70
80
90
2 Lanes case 3 Lanes case
Det
ectio
n di
stan
ce (m
)
(3)
(4)
(3)
(4)
(2)
(2)
(2)

DRIVSCO: Extracción de un modelo de conductor mediante la abstracción de comportamiento
Universidad de Granada: Desarrollo de un sistema de visión multimodal en tiempo real Validación de su utilidad en un sistema de asistencia para la
conducción nocturna
Visibility (Dark Obstacles)
Stopping Distance (100 km/h)
ADILIS® up to 150 meters ca. 80 meters
Low beam light range: ~ 60 m
IR beam: ~150 m
(percepción-acción en ciclo cerrado)

DRIVSCO: Vehículo instrumentado
LVDS (V
ideo D
ata)
Unidad sensorUnidad de procesamiento
Adqusición de imagenProcesamiento de imagenEstrategia de aviso (Aplicación)
Interfaz al visor superpuesto) u otros sistemas
Head-up-Display
Módulo-IR

DRIVSCO UGR: Visión-on-chip

Optical Flow Architecture

Stereo Architecture

System Architecture

On board Memory Map
• Green: 8 bit data, packed by 4• Red: 12 bit data, packed by 2• Gray: 12 bit data, packed by 3
Memory consumption:0.5 + 1 + 0.75 = 2.25 MB
Large bandwidth:(2.25+0.5) * 25 MB/s
for a 512x512 image @ 25 fps
4 x 8MB ZBT banks36 bit /word

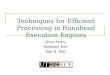
Recursos (FPGA Virtex-4)
CircuitTotal 4 input
LUTs(out of 84352)
Slice Flip Flops
(out of 84352)
Slices(out of 42176)
DSP(out of 160)
Block RAM (out of 376) Freq.
Board Interface 4774 (5%) 5195 (6%) 5388 (12%) 0 36 (9%) 112,4 MHz
Local Features 14356 (17%) 13364 (15%) 12401 (29%) 142(88%) 50 (13%) 57,2 MHz
Disparity 33466 (39%) 23154 (27%) 23630 (56%) 83 (51%) 85 (22%) 46,3 MHz
Optical Flow 41419 (49%) 35006 (41%) 29342 (69%) 132 (82%) 98(26%) 46,5 MHz
Total System
76828 (91%)
49762 (58%)
42072 (99%) 160 (100%) 132 (35%) 46,4 MHz
Las últimas familias de FPGAs tienen un x4 más de recursos (acorde a la Ley de Moore!)
3268 unidades básicas de procesamiento en paralelo.

On-chip front-end Low level image processing engine

Software interface

Software interface

DEMOS

DEMOS II

En realización... Detección de IMOs
(Independent Moving Objects) Fusión de la información de
estereo y flujo. Acumulación de hipótesis
para esas regiones.

Parámetros de aprendizaje
Información del tipo de alarma
Visión de las cámaras
DRIVSCO GUI

24 de abril de 2023
DRIVSCO: impacto mediatico

Proyectos con Empresas
PIMA ANAFOCUS

Proyecto SAPVIA-PIMA (Anafocus)
Objetivos: estudio de la plataforma EyeRis en diferentes aplicaciones. Migración del monitor de adelantamientos.
Tecnología: Procesador plano focal (Q-Eye) + procesador digital de 32 bits (Nios)

Proyecto SAPVIA-PIMA (Anafocus)
Procesamiento de flujo óptico

Proyecto SAPVIA-PIMA (Anafocus)
Seguimiento de vehículos. Incorporación de nuevos sensores (acelerómetros
y giróscopos).

Medición de la distancia de Detección
Se realizaron 27 pruebas con diferentes velocidades (20, 40 y 60 Km/h) y diferentes desfases del hemisferio izquierdo para aumentar el rango de detección.
Distancia de detección media en función del desfase
Velocidad Relativa Tiempo de reacción20 Km/h 4.86 s40 Km/h 2.4 s60 Km/h 1.6 s
Tiempos de reacción del conductor

Sistemas ayuda baja visión
PLATAFORMA SERBA

36
Augmented viewAugmented viewpara visión en túnel
See-through HMD Videocámara gran angular ~70º Detección de bordes
en imagen (dibujo) Representación reducida en HMD Permite el movimiento de cabeza y ojo

37
SERBA
AspectoNOMAD Retinal Display
Exview CCD Low Light
MinicameraLow cost FPGA reconfigurable

38
Imagen Nomad Paloma

39
Video ejemplos

Resumen/conclusiones Hemos presentado arquitecturas de procesamiento
de altas prestaciones basadas en FPGAs. También tenemos experiencia en optimización de
software en GPUs, procesadores y DSPs. Actualmente podemos computar on-chip flujo
óptico, estéreo y características locales de la imagen en tiempo real.
Aplicaciones: Sistemas de ayuda a la conducción. Sistemas para baja visión