Embed Size (px)
Citation preview

Machine Intelligence & Robotic Control, Vol. 1, No. 1, 3{17 (2000)
Paper
Multiagent Teleautonomous Behavioral Control
Khaled S. Aliy and Ronald C. Arkinz
Abstract: Multiagent schema-based reactive robotic systems are complemented with a new behaviorcontrolled by a human operator. This enables the society to be a�ected as a group rather thanindividually. The reactive control system views the operator as another behavior. The operatorcan also control the personality of the robot group. Simulation results are presented for foraging,vacuuming, and herding tasks. Results on real robots are presented for maneuvering out of a boxcanyon and squeezing through a small space. Teleautonomous operation of multiagent reactive systemswas demonstrated to be signi�cantly useful for some tasks, less so for others.
Keywords: Multiagent Telerobotics, Multiagent Robotics, Robot Usability
1. Introduction
REACTIVE multiagent robotic societies are poten-tially useful for a wide-range of tasks. This in-
cludes operations such as foraging and grazing [1], [7],[12] which have applicability in service (vacuuming andcleaning), industrial (assembly) and military (convoyand scouting) scenarios.Although some promising results have been achieved
in these systems to date [8], purely reactive systemscan still bene�t from human intervention. Manypurely reactive systems are myopic in their approach:they sacri�ce global knowledge for rapid local interac-tion. Global information can be useful and it is in thiscapacity that a human operator can interact with amultiagent control system.A related problem in teleoperation is that the oper-
ator is potentially overwhelmed by the large amountof data required to control a multiagent system in adynamic environment. This phenomenon is referredto as cognitive overload. The approach described inthis paper provides a mechanism to signi�cantly re-duce the human operator's cognitive and perceptualload by allowing the reactive system to deal with eachrobot's local control concerns. Two principal mecha-nisms to achieve this are to allow the operator to acteither as a constituent behavior of the society or toallow him/her to supervise the societal behavioral setsand gains, acting only as needed based upon observ-able progress towards task completion.In this research, the operator is allowed to control
whole societies of agents; not one robot at a time, butrather controlling global behavior for the entire mul-tiagent system. This is a straightforward extension of
� Recieved Month Day, Year; accepted Month Day, Year.This work was supported by the National Science Founda-tion under grant #IRI-9100149 and the Advanced ResearchProjects Agency under ARPA/ONR Grant #N00014-94-1-0215.
y California Institute of Technology, Jet Propulsion Labora-tory, 4800 Oak Grove Drive, Mail Stop 198-219, Pasadena,CA, USA 91109. E-mail: [email protected]
z Mobile Robot Laboratory, College of Computing, Geor-gia Institute of Technology, Atlanta, GA, USA 30332. E-mail:[email protected]
our work in both multiagent robotic systems [1] andteleautonomy [2]. The end product is a simple way fora commander to control large numbers of constituentelements without concern for low-level details (whicheach of the agents is capable of handling by them-selves). In essence, the human operator is concernedwith global social strategies for task completion, andis far less involved with the speci�c behavioral tacticsused by any individual agent.
2. Single Agent Teleautonomous Control
Our previous results [2] in the integration of reac-tive and telerobotic control in the context of singleagents provide the basis for our extension of this con-cept into multiagent societies. In this earlier work wehave shown that a human operator can interact witha reactive robot in at least two di�erent ways:
� Operator as a schema: Here the human actsas an additional behavior in the already exist-ing collection of behaviors that are active withinthe robot. Using a schema-based methodology [3],each active behavior contributes a vector that isrelated to the agent's intentions - such as to getto a particular object, not crash into something,etc. The operator's intentions are introduced atthe same level - as another schema contributingforces in the same manner as all the other behav-iors do.
� Operator as a behavioral supervisor: In thiscase, the human changes the behavioral settingsof the robot as it moves through the world, essen-tially changing its \personality". For example,the robot can become more aggressive by increas-ing its attraction towards a desirable object ordecreasing its repulsion from obstacles.
In schema-based reactive control [3], each active be-havior (schema) provides its own reaction to the en-vironment by creating a vector response to a speci�cperceptual stimulus. The entire set of vector outputscreated by all active schemas is summed and normal-ized and then transmitted to the robot for execution.No arbitration is involved, rather a blending of all ac-tive concurrent behaviors occurs. The system at this

4 Khaled S. Ali and Ronald C. Arkin
c 2000 Cyber Scienti�c Machine Intelligence & Robotic Control, 1(1), 3{17 (2000)
Multiagent Teleautonomous Behavioral Control 5
level is completely reactive, not retaining knowledgeof the world or the agent's past performance.
3. Multiagent Teleautonomous Control
Our laboratory is conducting extensive research inmultiagent robotic systems [1], [4], [5] both in simula-tion and on our 3 Denning Mobile Robots. Roboticsystems are speci�ed as a �nite state acceptor thatspeci�es the behavioral (schema) assemblages [9], [10]and the transitions between them. An example statemachine for a foraging task appears in Figure 1. Inthis �gure there exist three distinct high-level behav-ioral states for each agent:
� Wander - which consists of a high gain and longpersistence noise schema that is used to producewandering while having moderate inter-robot re-pulsion to produce dispersion coupled with signif-icant obstacle repulsion (avoid-static-obstacleschemas).
� Acquire - which consists of using a move-to-goal
schema to move towards a detected or reportedattractor (depending on the communication strat-egy used [5]) with a reduced inter-robot repulsionto allow for multi-robot convergence on attractorsand continued obstacle avoidance (again providedby the avoid-static-obstacle schema). A smallamount of noise is still injected into the systemto facilitate navigation [3].
� Deliver - which occurs after acquisition of the at-tractor and results in delivery of the object backto homebase by one or more agents. The same be-haviors are used as in the acquire state with thegoal location now being the homebase.
Deliver
AcquireEncounter
DepositAttach
Wander
Fig. 1 Behavioral States for Foraging Task.
Space prevents a full discussion of the mechanismsfor reactive multiagent control. The interested readeris referred to [1], [5] for more information.
3. 1 Implementation
We have developed a multiagent teleautonomy sys-tem called Telop. In Telop, teleoperation is im-plemented both as an additional schema in the sys-tem (the operator-as-a-schema approach) and as amethod for modifying the behavioral parameters (theoperator-as-a-behavioral-supervisor approach).We will discuss the operator-as-a-schema approach
�rst. Based on the instructions of a human agent,
the teleautonomy schema contributes a vector in thesame way as do the other schemas, such as move-
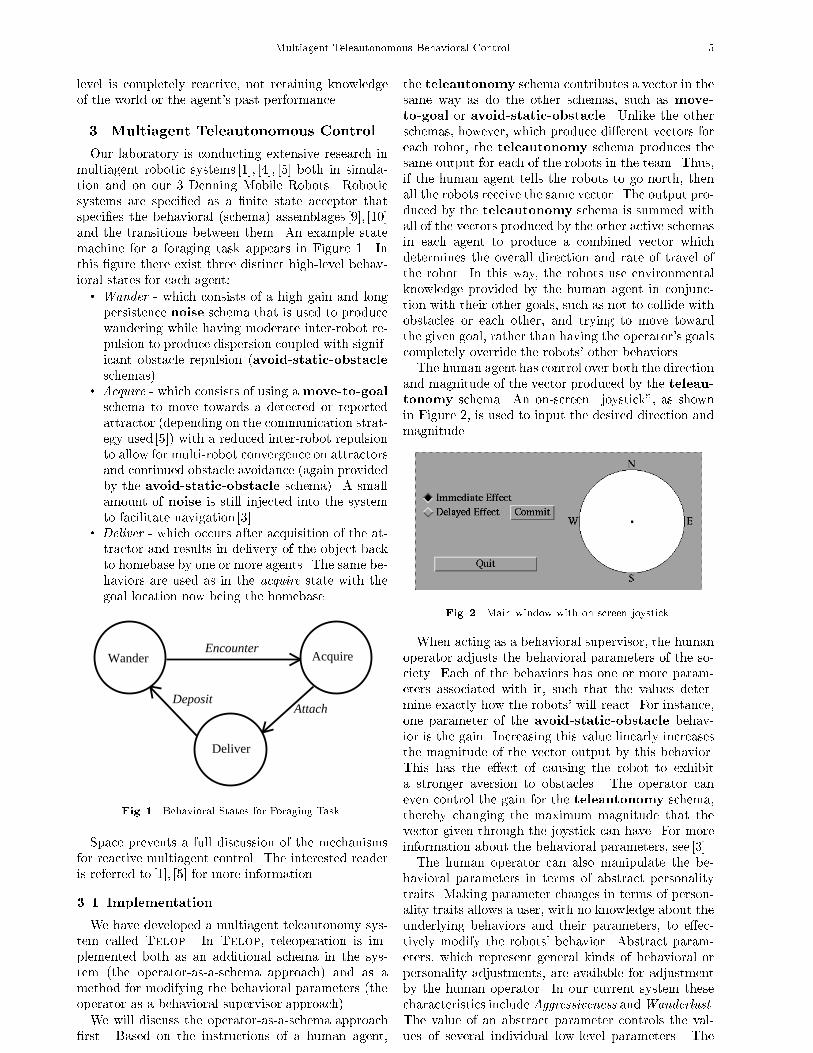
to-goal or avoid-static-obstacle. Unlike the otherschemas, however, which produce di�erent vectors foreach robot, the teleautonomy schema produces thesame output for each of the robots in the team. Thus,if the human agent tells the robots to go north, thenall the robots receive the same vector. The output pro-duced by the teleautonomy schema is summed withall of the vectors produced by the other active schemasin each agent to produce a combined vector whichdetermines the overall direction and rate of travel ofthe robot. In this way, the robots use environmentalknowledge provided by the human agent in conjunc-tion with their other goals, such as not to collide withobstacles or each other, and trying to move towardthe given goal, rather than having the operator's goalscompletely override the robots' other behaviors.The human agent has control over both the direction
and magnitude of the vector produced by the teleau-tonomy schema. An on-screen \joystick", as shownin Figure 2, is used to input the desired direction andmagnitude.
Fig. 2 Main window with on-screen joystick.
When acting as a behavioral supervisor, the humanoperator adjusts the behavioral parameters of the so-ciety. Each of the behaviors has one or more param-eters associated with it, such that the values deter-mine exactly how the robots' will react. For instance,one parameter of the avoid-static-obstacle behav-ior is the gain. Increasing this value linearly increasesthe magnitude of the vector output by this behavior.This has the e�ect of causing the robot to exhibita stronger aversion to obstacles. The operator caneven control the gain for the teleautonomy schema,thereby changing the maximum magnitude that thevector given through the joystick can have. For moreinformation about the behavioral parameters, see [3].The human operator can also manipulate the be-
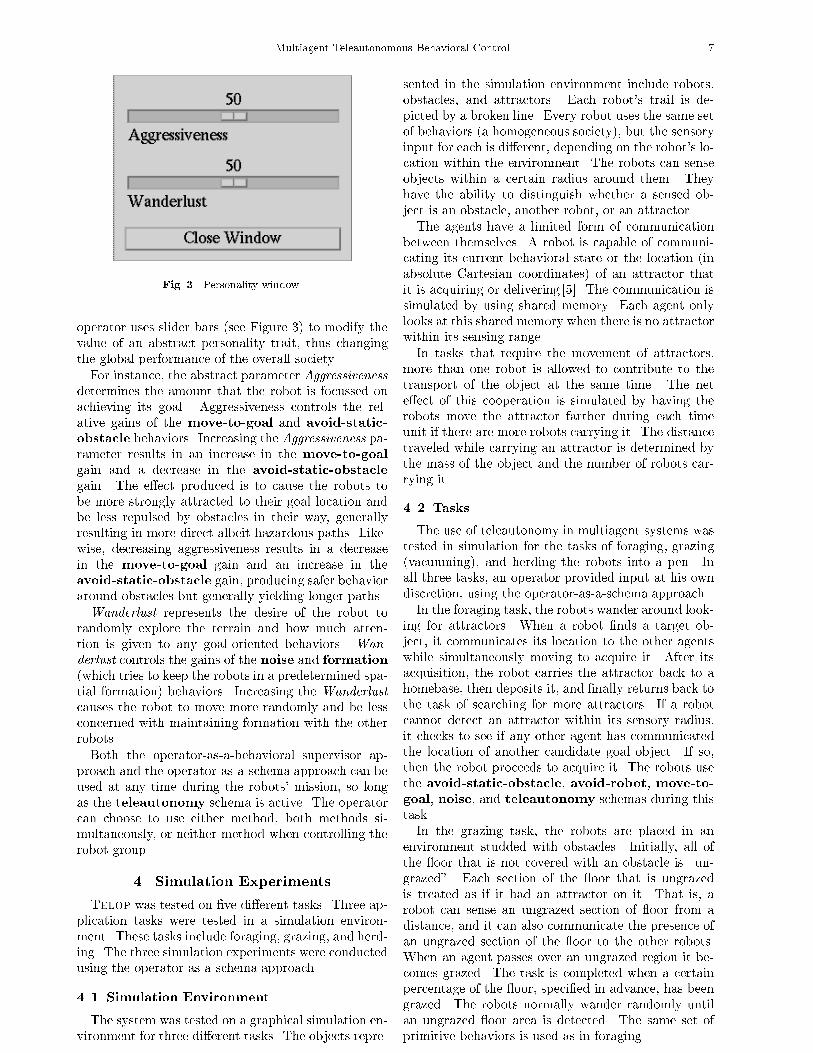
havioral parameters in terms of abstract personalitytraits. Making parameter changes in terms of person-ality traits allows a user, with no knowledge about theunderlying behaviors and their parameters, to e�ec-tively modify the robots' behavior. Abstract param-eters, which represent general kinds of behavioral orpersonality adjustments, are available for adjustmentby the human operator. In our current system thesecharacteristics include Aggressiveness andWanderlust.The value of an abstract parameter controls the val-ues of several individual low-level parameters. The
6 Khaled S. Ali and Ronald C. Arkin
c 2000 Cyber Scienti�c Machine Intelligence & Robotic Control, 1(1), 3{17 (2000)
Multiagent Teleautonomous Behavioral Control 7
Fig. 3 Personality window.
operator uses slider bars (see Figure 3) to modify thevalue of an abstract personality trait, thus changingthe global performance of the overall society.For instance, the abstract parameter Aggressiveness
determines the amount that the robot is focussed onachieving its goal. Aggressiveness controls the rel-ative gains of the move-to-goal and avoid-static-
obstacle behaviors. Increasing the Aggressiveness pa-rameter results in an increase in the move-to-goal
gain and a decrease in the avoid-static-obstacle
gain. The e�ect produced is to cause the robots tobe more strongly attracted to their goal location andbe less repulsed by obstacles in their way, generallyresulting in more direct albeit hazardous paths. Like-wise, decreasing aggressiveness results in a decreasein the move-to-goal gain and an increase in theavoid-static-obstacle gain, producing safer behavioraround obstacles but generally yielding longer paths.
Wanderlust represents the desire of the robot torandomly explore the terrain and how much atten-tion is given to any goal-oriented behaviors. Wan-derlust controls the gains of the noise and formation
(which tries to keep the robots in a predetermined spa-tial formation) behaviors. Increasing the Wanderlustcauses the robot to move more randomly and be lessconcerned with maintaining formation with the otherrobots.Both the operator-as-a-behavioral supervisor ap-
proach and the operator-as-a-schema approach can beused at any time during the robots' mission, so longas the teleautonomy schema is active. The operatorcan choose to use either method, both methods si-multaneously, or neither method when controlling therobot group.
4. Simulation Experiments
Telop was tested on �ve di�erent tasks. Three ap-plication tasks were tested in a simulation environ-ment. These tasks include foraging, grazing, and herd-ing. The three simulation experiments were conductedusing the operator-as-a-schema approach.
4. 1 Simulation Environment
The system was tested on a graphical simulation en-vironment for three di�erent tasks. The objects repre-
sented in the simulation environment include robots,obstacles, and attractors. Each robot's trail is de-picted by a broken line. Every robot uses the same setof behaviors (a homogeneous society), but the sensoryinput for each is di�erent, depending on the robot's lo-cation within the environment. The robots can senseobjects within a certain radius around them. Theyhave the ability to distinguish whether a sensed ob-ject is an obstacle, another robot, or an attractor.The agents have a limited form of communication
between themselves. A robot is capable of communi-cating its current behavioral state or the location (inabsolute Cartesian coordinates) of an attractor thatit is acquiring or delivering [5]. The communication issimulated by using shared memory. Each agent onlylooks at this shared memory when there is no attractorwithin its sensing range.In tasks that require the movement of attractors,
more than one robot is allowed to contribute to thetransport of the object at the same time. The nete�ect of this cooperation is simulated by having therobots move the attractor farther during each timeunit if there are more robots carrying it. The distancetraveled while carrying an attractor is determined bythe mass of the object and the number of robots car-rying it.
4. 2 Tasks
The use of teleautonomy in multiagent systems wastested in simulation for the tasks of foraging, grazing(vacuuming), and herding the robots into a pen. Inall three tasks, an operator provided input at his owndiscretion, using the operator-as-a-schema approach.In the foraging task, the robots wander around look-
ing for attractors. When a robot �nds a target ob-ject, it communicates its location to the other agentswhile simultaneously moving to acquire it. After itsacquisition, the robot carries the attractor back to ahomebase, then deposits it, and �nally returns back tothe task of searching for more attractors. If a robotcannot detect an attractor within its sensory radius,it checks to see if any other agent has communicatedthe location of another candidate goal object. If so,then the robot proceeds to acquire it. The robots usethe avoid-static-obstacle, avoid-robot, move-to-
goal, noise, and teleautonomy schemas during thistask.In the grazing task, the robots are placed in an
environment studded with obstacles. Initially, all ofthe oor that is not covered with an obstacle is \un-grazed". Each section of the oor that is ungrazedis treated as if it had an attractor on it. That is, arobot can sense an ungrazed section of oor from adistance, and it can also communicate the presence ofan ungrazed section of the oor to the other robots.When an agent passes over an ungrazed region it be-comes grazed. The task is completed when a certainpercentage of the oor, speci�ed in advance, has beengrazed. The robots normally wander randomly untilan ungrazed oor area is detected. The same set ofprimitive behaviors is used as in foraging.

8 Khaled S. Ali and Ronald C. Arkin
c 2000 Cyber Scienti�c Machine Intelligence & Robotic Control, 1(1), 3{17 (2000)

Multiagent Teleautonomous Behavioral Control 9
In the herding task, there is a pen, formed of obsta-cles, with an opening in the simulation environment.All the agents are initially outside of the pen. Therobots wander aimlessly in random directions for theduration of the run. The robots are repulsed by theobstacles and the other robots. The task is to get allof the robotic agents inside the pen at the same time.The robots use the avoid-static-obstacle, avoid-robot, noise, and teleautonomy schemas duringthis task.
4. 3 Results
For the foraging and grazing tasks, tests were con-ducted that compared the total number of steps takenby the robots to complete the tasks with and withoutthe help of a human. For the herding task, no compar-ison could be made between teleoperation and no tele-operation, because the likelihood of all the robots wan-dering into the pen by themselves at the same time isvirtually nil. Interesting information was gained aboutthis task nonetheless.
4. 3. 1 Foraging Results In the tests conducted forthe foraging task, three robots were used to gathersix attractors. The density of obstacles in the envi-ronment was set to 10%. The total number of stepsrequired to �nish the task was measured both with andwithout teleoperation. If teleoperation is used wisely,it can signi�cantly lower the total number of steps re-quired to complete the task by greatly reducing thetime spent in the wander state (i.e., the number ofsteps that the robots spend looking for attractors). Ifnone of the agents currently sense an attractor, thenthe operator can assist by guiding the robots in one'sdirection. However, once the robots can sense an at-tractor, the operator should stop giving instructions,unless the instructions are to deal with a particularlytroublesome set of obstacles. In general, the robotsperform more e�ciently by themselves than when un-der the control of a human if the agents already havean attractor in sight. The human's instructions tend tohinder the robots if they are already moving to acquireor return an attractor. Indeed, when teleoperation isused at all times, the overall number of steps requiredfor task completion often increases when compared tono teleoperation at all. However, if the human onlyacts to guide the robots toward an attractor when noneare currently detected, signi�cant reductions in timefor task completion are possible. The average over sixexperimental runs of the total number of time stepsrequired for task completion when teleoperation wasused in this manner was 67% of the average task com-pletion time when no teleoperation was used.
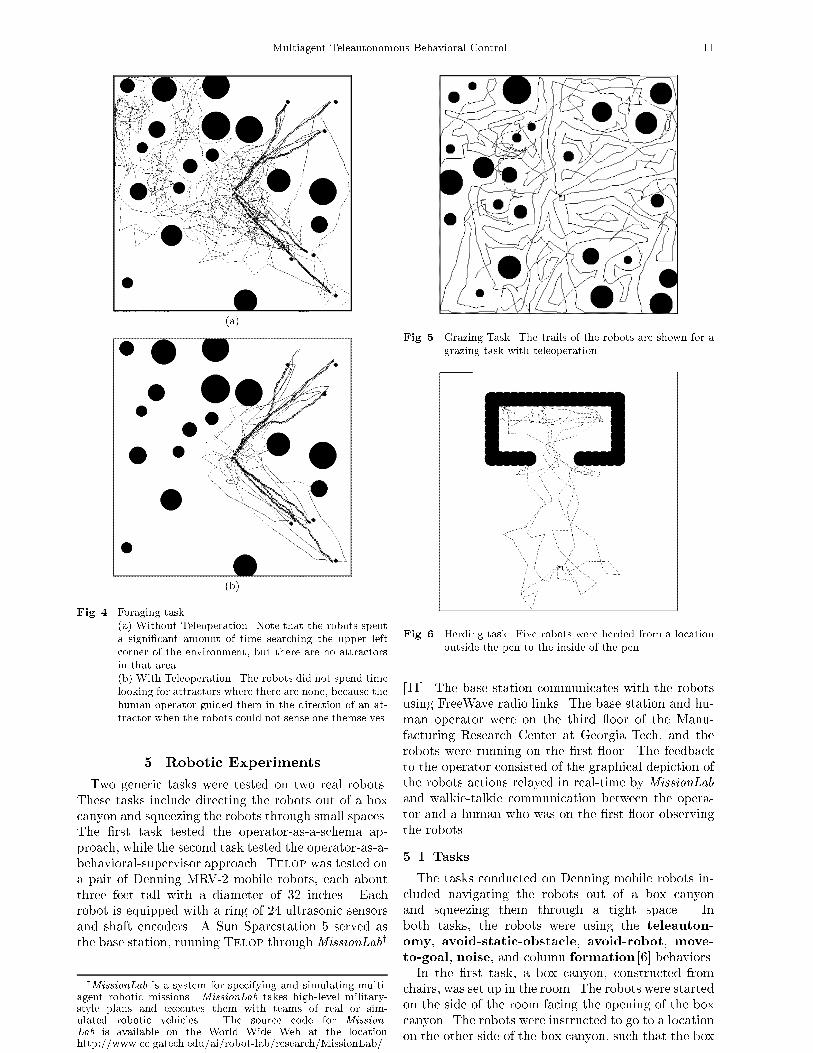
An example trace of a forage task without teleop-eration is shown in Figure 4a. Another trace of thesame forage task with a human operator helping therobots �nd the attractors when they did not have onein sensing range is shown in Figure 4b. The robots allstarted at the homebase in the center of the environ-ment. In the run without teleoperation, the robots im-mediately found the two closer attractors at the lower
right. Then they quickly found the two closer attrac-tors at the upper right. At this point, the robots didnot immediately detect the remaining two attractors.Two of the three agents proceeded by chance to theleft and upper left sides of the environment, wanderingunsuccessfully while seeking an attractor. Eventually,the other robot found the attractor in the lower rightcorner, and the other two robots moved to help with itsreturn. After delivering it to the homebase, the robotswandered again for a while without �nding the last at-tractor. Finally, the last attractor was detected andsuccessfully delivered to homebase. In the same worldwith the help of a human, the two protracted periods ofwandering while searching for attractors are avoided.This indicates the types of environments where theuse of teleoperation for the forage task is most bene-�cial. The greatest bene�t from teleoperation can beseen when there are one or more attractors that are farfrom both the homebase and the start locations of therobots. Typically, this is when the robots do not sensethe target objects without wandering for a while.
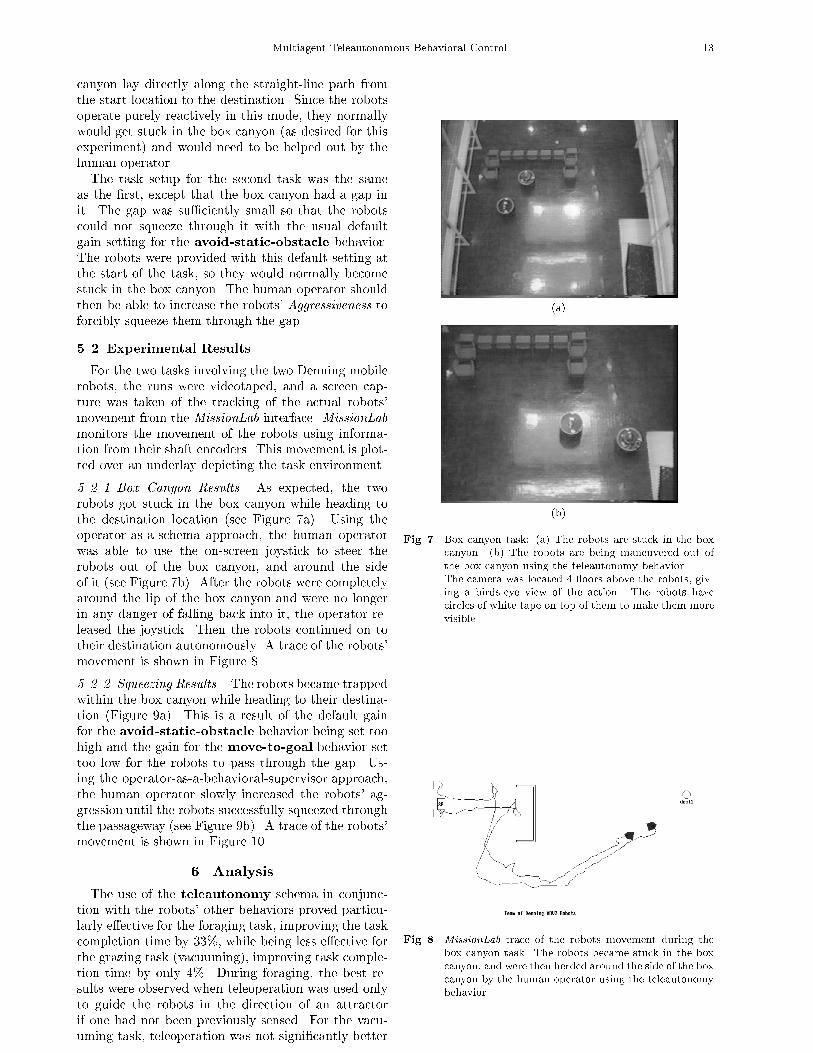
4. 3. 2 Grazing (Vacuuming) Task Results For thegrazing task, �ve robots were used. A sample runof a grazing task is shown in Figure 5. In this case,the robots performed poorly when a large amount ofteleoperation was involved. Teleoperation only proveduseful when the robots had di�culty in locating asection of ungrazed oor. When the robots had al-ready detected an ungrazed area, they performed bet-ter without any input from the human operator. Theagents' performance degraded considerably, often tak-ing several times longer to complete the task, if tele-operation was used when a robot had already locatedan ungrazed oor area. Moreover, since remaining un-treated areas tend to be clustered together in largepatches, the agents typically do not need to spendlong periods of time looking for another ungrazed spot(which is opposite the case of the foraging task dis-cussed above). Therefore, the use of teleoperation didnot help signi�cantly with the grazing task. Whenteleoperation was used solely to help the robots �ndungrazed oor area when they were not already graz-ing, only a 4% improvement in average task completiontime over six runs was observed when compared to notusing teleoperation. Thus, when used wisely, teleop-eration helped somewhat but not to a large extent.
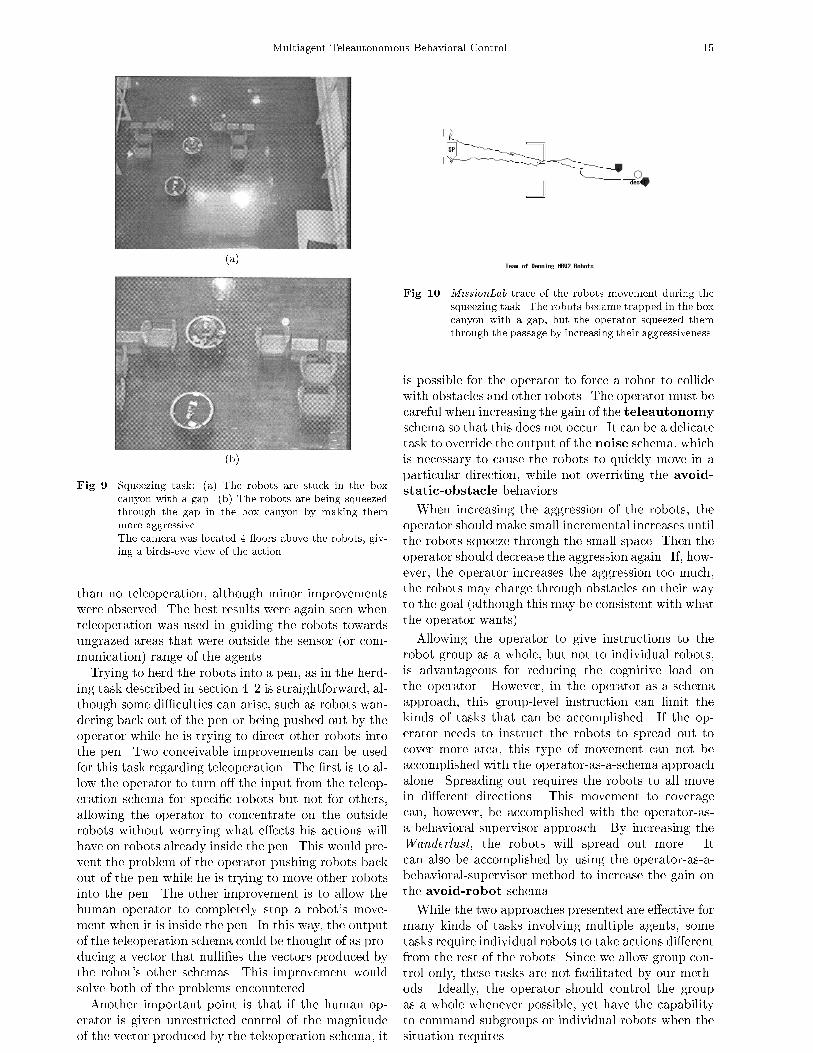
4. 3. 3 Herding Task Results For the herding task,�ve robots were herded into a pen that was 36 unitslong by 18 units wide, with a 12 unit long door in oneof the longer sides. All of the robots started at onespot on the side of the pen with the door. In mosttest runs, the operator encountered no di�culty withthis task. He was able to herd the robots into the penwith no problem. In some of the test runs, there werea few minor di�culties, such as robots wandering backout of the pen after having been herded in. However,the human operator was still able to complete the taskwithout much frustration and in a reasonable amountof time. The results of a test run for the herding taskare shown in Figure 6.

10 Khaled S. Ali and Ronald C. Arkin
c 2000 Cyber Scienti�c Machine Intelligence & Robotic Control, 1(1), 3{17 (2000)
Multiagent Teleautonomous Behavioral Control 11
(a)
(b)
Fig. 4 Foraging task.(a) Without Teleoperation. Note that the robots spenta signi�cant amount of time searching the upper leftcorner of the environment, but there are no attractorsin that area.(b) With Teleoperation. The robots did not spend timelooking for attractors where there are none, because thehuman operator guided them in the direction of an at-tractor when the robots could not sense one themselves.
5. Robotic Experiments
Two generic tasks were tested on two real robots.These tasks include directing the robots out of a boxcanyon and squeezing the robots through small spaces.The �rst task tested the operator-as-a-schema ap-proach, while the second task tested the operator-as-a-behavioral-supervisor approach. Telop was tested ona pair of Denning MRV-2 mobile robots, each aboutthree feet tall with a diameter of 32 inches. Eachrobot is equipped with a ring of 24 ultrasonic sensorsand shaft encoders. A Sun Sparcstation 5 served asthe base station, running Telop throughMissionLaby
yMissionLab is a system for specifying and simulating multi-agent robotic missions. MissionLab takes high-level military-style plans and executes them with teams of real or sim-ulated robotic vehicles. The source code for Mission-Lab is available on the World Wide Web at the locationhttp://www.cc.gatech.edu/ai/robot-lab/research/MissionLab/
Fig. 5 Grazing Task. The trails of the robots are shown for agrazing task with teleoperation.
Fig. 6 Herding task. Five robots were herded from a locationoutside the pen to the inside of the pen.
[11]. The base station communicates with the robotsusing FreeWave radio links. The base station and hu-man operator were on the third oor of the Manu-facturing Research Center at Georgia Tech, and therobots were running on the �rst oor. The feedbackto the operator consisted of the graphical depiction ofthe robots actions relayed in real-time by MissionLaband walkie-talkie communication between the opera-tor and a human who was on the �rst oor observingthe robots.
5. 1 Tasks
The tasks conducted on Denning mobile robots in-cluded navigating the robots out of a box canyonand squeezing them through a tight space. Inboth tasks, the robots were using the teleauton-
omy, avoid-static-obstacle, avoid-robot, move-
to-goal, noise, and column formation [6] behaviors.In the �rst task, a box canyon, constructed from
chairs, was set up in the room. The robots were startedon the side of the room facing the opening of the boxcanyon. The robots were instructed to go to a locationon the other side of the box canyon, such that the box

12 Khaled S. Ali and Ronald C. Arkin
c 2000 Cyber Scienti�c Machine Intelligence & Robotic Control, 1(1), 3{17 (2000)
Multiagent Teleautonomous Behavioral Control 13
canyon lay directly along the straight-line path fromthe start location to the destination. Since the robotsoperate purely reactively in this mode, they normallywould get stuck in the box canyon (as desired for thisexperiment) and would need to be helped out by thehuman operator.The task setup for the second task was the same
as the �rst, except that the box canyon had a gap init. The gap was su�ciently small so that the robotscould not squeeze through it with the usual defaultgain setting for the avoid-static-obstacle behavior.The robots were provided with this default setting atthe start of the task, so they would normally becomestuck in the box canyon. The human operator shouldthen be able to increase the robots' Aggressiveness toforcibly squeeze them through the gap.
5. 2 Experimental Results
For the two tasks involving the two Denning mobilerobots, the runs were videotaped, and a screen cap-ture was taken of the tracking of the actual robots'movement from the MissionLab interface. MissionLabmonitors the movement of the robots using informa-tion from their shaft encoders. This movement is plot-ted over an underlay depicting the task environment.
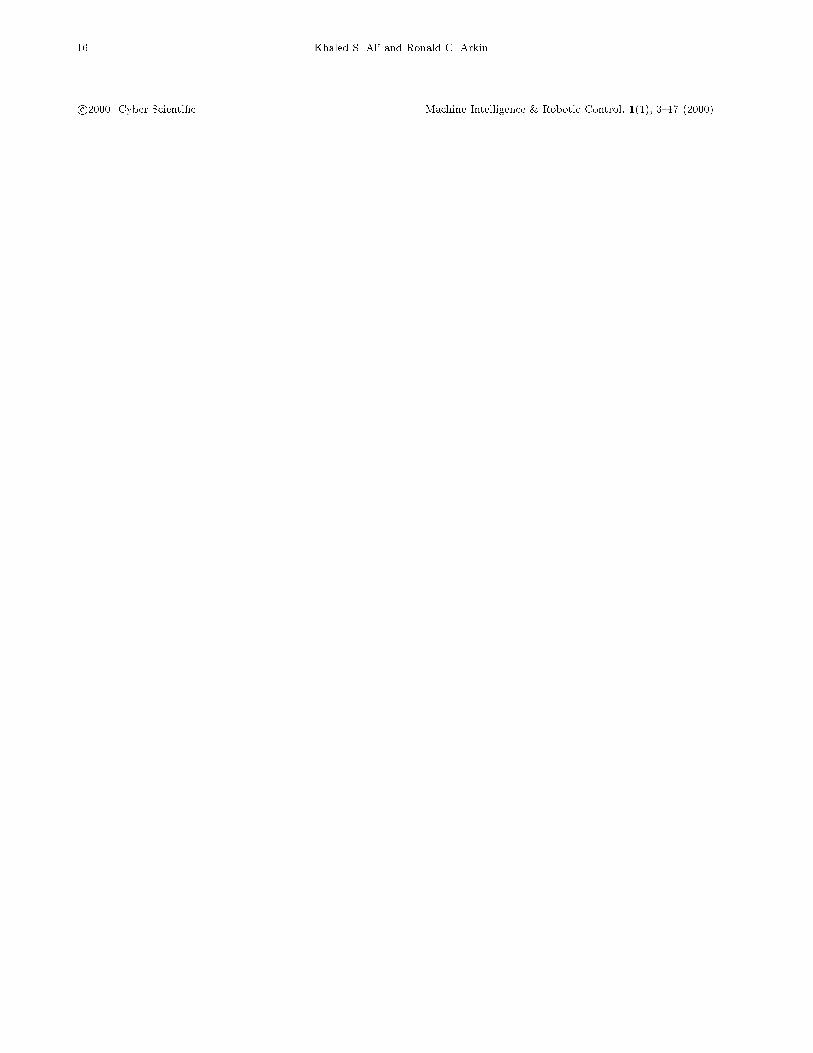
5. 2. 1 Box Canyon Results As expected, the tworobots got stuck in the box canyon while heading tothe destination location (see Figure 7a). Using theoperator-as-a-schema approach, the human operatorwas able to use the on-screen joystick to steer therobots out of the box canyon, and around the sideof it (see Figure 7b). After the robots were completelyaround the lip of the box canyon and were no longerin any danger of falling back into it, the operator re-leased the joystick. Then the robots continued on totheir destination autonomously. A trace of the robots'movement is shown in Figure 8.
5. 2. 2 Squeezing Results The robots became trappedwithin the box canyon while heading to their destina-tion (Figure 9a). This is a result of the default gainfor the avoid-static-obstacle behavior being set toohigh and the gain for the move-to-goal behavior settoo low for the robots to pass through the gap. Us-ing the operator-as-a-behavioral-supervisor approach,the human operator slowly increased the robots' ag-gression until the robots successfully squeezed throughthe passageway (see Figure 9b). A trace of the robots'movement is shown in Figure 10.
6. Analysis
The use of the teleautonomy schema in conjunc-tion with the robots' other behaviors proved particu-larly e�ective for the foraging task, improving the taskcompletion time by 33%, while being less e�ective forthe grazing task (vacuuming), improving task comple-tion time by only 4%. During foraging, the best re-sults were observed when teleoperation was used onlyto guide the robots in the direction of an attractorif one had not been previously sensed. For the vacu-uming task, teleoperation was not signi�cantly better
(a)
(b)
Fig. 7 Box canyon task: (a) The robots are stuck in the boxcanyon. (b) The robots are being maneuvered out ofthe box canyon using the teleautonomy behavior.The camera was located 4 oors above the robots, giv-ing a birds-eye view of the action. The robots havecircles of white tape on top of them to make them morevisible.
Fig. 8 MissionLab trace of the robots movement during thebox canyon task. The robots became stuck in the boxcanyon, and were then herded around the side of the boxcanyon by the human operator using the teleautonomybehavior.

14 Khaled S. Ali and Ronald C. Arkin
c 2000 Cyber Scienti�c Machine Intelligence & Robotic Control, 1(1), 3{17 (2000)
Multiagent Teleautonomous Behavioral Control 15
(a)
(b)
Fig. 9 Squeezing task: (a) The robots are stuck in the boxcanyon with a gap. (b) The robots are being squeezedthrough the gap in the box canyon by making themmore aggressive.The camera was located 4 oors above the robots, giv-ing a birds-eye view of the action.
than no teleoperation, although minor improvementswere observed. The best results were again seen whenteleoperation was used in guiding the robots towardsungrazed areas that were outside the sensor (or com-munication) range of the agents.Trying to herd the robots into a pen, as in the herd-
ing task described in section 4. 2 is straightforward, al-though some di�culties can arise, such as robots wan-dering back out of the pen or being pushed out by theoperator while he is trying to direct other robots intothe pen. Two conceivable improvements can be usedfor this task regarding teleoperation. The �rst is to al-low the operator to turn o� the input from the teleop-eration schema for speci�c robots but not for others,allowing the operator to concentrate on the outsiderobots without worrying what e�ects his actions willhave on robots already inside the pen. This would pre-vent the problem of the operator pushing robots backout of the pen while he is trying to move other robotsinto the pen. The other improvement is to allow thehuman operator to completely stop a robot's move-ment when it is inside the pen. In this way, the outputof the teleoperation schema could be thought of as pro-ducing a vector that nulli�es the vectors produced bythe robot's other schemas. This improvement wouldsolve both of the problems encountered.Another important point is that if the human op-
erator is given unrestricted control of the magnitudeof the vector produced by the teleoperation schema, it
Fig. 10 MissionLab trace of the robots movement during thesqueezing task. The robots became trapped in the boxcanyon with a gap, but the operator squeezed themthrough the passage by increasing their aggressiveness.
is possible for the operator to force a robot to collidewith obstacles and other robots. The operator must becareful when increasing the gain of the teleautonomy
schema so that this does not occur. It can be a delicatetask to override the output of the noise schema, whichis necessary to cause the robots to quickly move in aparticular direction, while not overriding the avoid-static-obstacle behaviors.
When increasing the aggression of the robots, theoperator should make small incremental increases untilthe robots squeeze through the small space. Then theoperator should decrease the aggression again. If, how-ever, the operator increases the aggression too much,the robots may charge through obstacles on their wayto the goal (although this may be consistent with whatthe operator wants).
Allowing the operator to give instructions to therobot group as a whole, but not to individual robots,is advantageous for reducing the cognitive load onthe operator. However, in the operator-as-a-schemaapproach, this group-level instruction can limit thekinds of tasks that can be accomplished. If the op-erator needs to instruct the robots to spread out tocover more area, this type of movement can not beaccomplished with the operator-as-a-schema approachalone. Spreading out requires the robots to all movein di�erent directions. This movement to coveragecan, however, be accomplished with the operator-as-a-behavioral-supervisor approach. By increasing theWanderlust, the robots will spread out more. Itcan also be accomplished by using the operator-as-a-behavioral-supervisor method to increase the gain onthe avoid-robot schema.
While the two approaches presented are e�ective formany kinds of tasks involving multiple agents, sometasks require individual robots to take actions di�erentfrom the rest of the robots. Since we allow group con-trol only, these tasks are not facilitated by our meth-ods. Ideally, the operator should control the groupas a whole whenever possible, yet have the capabilityto command subgroups or individual robots when thesituation requires.
16 Khaled S. Ali and Ronald C. Arkin
c 2000 Cyber Scienti�c Machine Intelligence & Robotic Control, 1(1), 3{17 (2000)

Multiagent Teleautonomous Behavioral Control 17
Human assistance was found to be useful in caseswhen the operator has some global knowledge that therobots do not have. In cases when the robots can cur-rently sense the information required to complete thetask, human assistance was shown to be detrimentalto task completion time.
7. Summary
A method by which multiagent reactive robotic soci-etal task execution can be in uenced via human inter-vention has been demonstrated. This method has beendemonstrated for a range of tasks including foraging,grazing, herding robots into a small con�ned area, ma-neuvering robots out of a box canyon, and squeezingrobots through a small space. Teleautonomous opera-tion of multiagent reactive systems was demonstratedto be signi�cantly useful for some tasks, while less sofor others. In our experiments, this form of human in-tervention into the execution of tasks for reactive mo-bile robot groups improved foraging behavior by 33%,but had a limited impact on grazing behavior. Thisform of human intervention also facilitated the congre-gation of agents into a con�ned area, rescuing robotsfrom a box canyon, and squeezing robots through asmall space, without overriding the inherent reactivebehaviors of the system. These last three activitieswould not have been possible with a strictly reactivesystem.
The Telop system has been integrated with theARPA UGV Demo II architecture using the STXmcumission control system for use on teams of HMMWVs.The teleautonomy behavior was demonstrated at atechnical demo during Demo C of the UGV projectin the summer of 1995.
Acknowledgment
Support for this project is provided by the Na-tional Science Foundation under grant #IRI-9100149and the Advanced Research Projects Agency underARPA/ONR Grant #N00014-94-1-0215. The authorswould like to thank Tucker Balch for his role in de-veloping the simulation software used in the simula-tion experiments, and Jonathan Cameron and DougMacKenzie for their role in developing MissionLab.
References
[1] R.C. Arkin, \Cooperation without Communication: Multi-agent Schema Based Robot Navigation", Journal ofRobotic Systems, Vol. 9(3), April 1992, pp. 351-364.
[2] R.C. Arkin, \Reactive Control as a Substrate for Teler-obotic Systems", IEEE Aerospace and Electronics SystemsMagazine, Vol. 6, No. 6, June 1991, pp. 24-31.
[3] R.C. Arkin, \Motor Schema-Based Mobile Robot Naviga-tion", International Journal of Robotics Research, Vol. 8,No. 4, August 1989, pp. 92-112.
[4] R.C. Arkin, J.D. Hobbs, \Dimensions of Communicationand Social Organization in Multi-Agent Robotic Systems",From animals to animats 2: Proc. 2nd International Con-ference on Simulation of Adaptive Behavior, 1992, pp. 486-493.
[5] T. Balch, R.C. Arkin, \Communication in Reactive Multia-gent Robotic Systems", Autonomous Robots, Vol. 1, No. 1,1994, pp. 27-52.
[6] T. Balch, R.C. Arkin, \Motor Schema-based FormationControl for Multiagent Robot Teams", 1995 InternationalConference on Multiagent Systems, 1995, pp. 10-16.
[7] R. Brooks, P. Maes, M. Mataric, G. More, \Lunar BaseConstruction Robots", IEEE International Workshop onIntelligent Robots and Systems (IROS '90), 1990, pp. 389-392.
[8] Y. Cao, A. Fukunaga, A. Khang, F. Meng, \CooperativeMobile Robotics: Antecedents and Directions", Proc. 1995International Conference on Intelligent Robotics and Sys-tems (IROS '95), 1995, Vol. 1, pp. 226-234.
[9] D.M. Lyons, M.A. Arbib, \A Formal Model of Computa-tion for Sensory-Based Robotics", IEEE Transactions onRobotics and Automation, Vol. 5, No. 3, June 1989.
[10] D. MacKenzie, R.C. Arkin, \Formal Speci�cation forBehavior-based Mobile Robots", in Mobile Robots VIII,Nov. 1993.
[11] D. MacKenzie, J. Cameron, R. Arkin, \Speci�cationand Execution of Multiagent Missions", Proc. 1995Int. Conf. on Intelligent Robotics and Systems IROS '95,1995, Vol. 3, pp. 51-58.
[12] M. Mataric, \Minimizing Complexity in Controlling a Mo-bile Robot Population", IEEE International Conference onRobotics and Automation, 1992, pp. 830-835.
Biographies
Khaled S. Ali Khaled S. Ali received a B.S. Degree fromVanderbilt University in Computer Science and Mathmat-ics in 1992 and a M.S. and Ph.D. in Computer Sciencefrom the Georgia Institute of Technology in 1995 and 1999respectively. He is a Member of the Technical Sta� at theJet Propulsion Laboratory. His research interests includemultiagent robotics, telerobotics, and robot usability. Herecently worked on the robotic arm for the Mars Volatilesand Climate Surveyor project, which was part of the MarsPolar Lander.
Ronald C. Arkin Ronald C. Arkin received the B.S.Degree from the University of Michigan and a Ph.D. inComputer Science from the University of Massachusetts,Amherst. He then assumed the position of Assistant Pro-fessor in the College of Computing at the Georgia Instituteof Technology where he now holds the rank of Professorand is the Director of the Mobile Robot Laboratory. Dr.Arkin's research interests include behavior-based reactivecontrol and action-oriented perception for mobile robotsand unmanned aerial vehicles, robot survivability, multia-gent robotic systems, and learning in autonomous systems.He has over 90 technical publications in these areas. Prof.Arkin is the author of the book Behavior-Based Robotics(MIT Press) co-edited Robot Colonies (Kluwer). Fund-ing sources have included the National Science Foundation,DARPA, U.S. Army, Savannah River Technology Center,Honda RD, and the O�ce of Naval Research. Dr. Arkinserves/served as an Associate Editor for IEEE Expert, asa member of the Editorial Boards of Autonomous Robotsand the Journal of Applied Intelligence and is the SeriesEditor for the MIT Press book series Intelligent Roboticsand Autonomous Agents. He is a Senior Member of theIEEE, and a member of AAAI and ACM.
18 Khaled S. Ali and Ronald C. Arkin
c 2000 Cyber Scienti�c Machine Intelligence & Robotic Control, 1(1), 3{17 (2000)