Embed Size (px)
Citation preview

Holographic Application Laboratory • Holography and Electronic Speckle Pattern Interferometry (ESPI) are interferometric
techniques. • ESPI can be considered as the electronic version of holographic interferometry. • They are full field non-contact experimental measuring techniques that allows rapid and
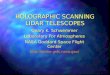
highly accurate measurement of the three components of deformation. Capabilities of the lab The laboratory of Holographic Application Laboratory has various digital versions of holographic/ESPI sensors (such as Q-100 and Q-300 sensors from Dantec-Ettemeyer GmbH, Ulm, Germany) and software packages developed for different application purposes. In comparison with the traditional experimental strain gauge technique, they deliver fast, complete three-dimensional information at thousands of measuring points in the field of view. The measuring sensitivity for deformation is about 30 nm and for strain is about 0.1 micro-strain. By using step-by-step method, the maximal measurable strain is unlimited. It is especially suitable for experimental validation of FEM and other CAE data. Principle: ESPI is an interferometric technique. The layout of the setup for in-plane and out-of-plane measurement using ESPI is shown in Fig1 and2.
Fig 1: Schematic Layout for In-Plane Measurement
In-plane deformation:u (or v) = [λ/(4π sin α)] ∆

In case of out-of-plane measurement, an object to be studied is illuminated by an expanded laser. The rays reflecting from the object surface recombine with the reference beam after they pass through a beam combiner. This results in an interference pattern, i.e. so-called speckle interferogram, which is recorded by the CCD camera. Before the object is deformed,
Image 1 Initial State
Image 2 After Loading
Difference (Deformation) A visible
Fringe Pattern
Defect
Fig 3: Graphical way to produce a visible interferometric fringe pattern
Fig 2: Schematic Layout for Out-Of-Plane Measurement Out-of-plane deformation: w = (λ/4π)∆, (λ::wavelength)
If the illuminating angle α=0 or close to zero

the phase difference between the object and the reference beams is φ. After the object is deformed, the phase difference becomes φ’ [φ’ = φ + ∆) and the relative phase change ∆ results from the deformation of the object. By comparing the speckle patterns before and after deformation, a fringe pattern is produced representing the deformation and is as shown in the figure 3. Quantitative determination of phase data can be obtained by using the phase-shift technique. The Phase shift technique is a method to quantitatively determine the phase data by intensity data of a few images recorded. The simplest method for calculating phase distribution φ is to record four images in a same state. A 90 degree phase shift is introduced between each image. The intensity data of four images can now be expressed as following: I1 = I0 + γ cos φ I2 = I0 + γ cos (φ + 90°), I3 = I0 + γ cos (φ + 180°), I4 = I0 + γ cos (φ + 270°).
31
24tanIIIIarc
−−
=φ
The process involved to calculate the phase difference φ and φ’ (before and after loading) and to determine the relative phase change ∆ resulted from the deformation of the object is as shown in Fig. 4. The next step is to demodulate (unwrap) the phase map, and to display the deformation data in three dimensional form (Fig. 5).

Fig 4: Phase Shift Technique for determining the relative Phase Change ∆
Fig 5: Demodulation of Phase Map and 3D-display of the deformation data
I1 I2
I3 I4
I’1 I’2
I’3 I’4
φ φ’-
∆
I1 I2
I3 I4
I’1 I’2
I’3 I’4
φ φ’-
∆
Originally Measured Phase Map
After smoothing Demodulated phase map
3D-display of out-of-plane
deformation “w”

Applications:
• Rapid, Accurate and whole field Measurement of 3D Deformations and Strains • Rapid, Accurate and whole field Determination of Residual Stress • Determination of Material Properties • Vibration Measurement and Modal analysis • Design Validation and Optimization • Determination of Mechanical properties on biomedical materials
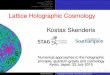
Strain Measurement
ESPI v/s Strain Gauge for Tensile Test Original data measured in x-direction Deformation in x-direction Strain in x-direction Original data measured in y-direction Deformation in y-direction Strain in y-direction
Shear bands in aluminum
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0 5 10 15 20 25 30
Optical result
Strain Gauge
Average at strain gauge positionof optical measuring results
High local resolution of the optical result reveals the accurate strain values
Strain (10^-3)
Position

Residual Strain/Stress Measurement by Hole Drilling Method
Measuring Principle of 3D-displacement fields induced by residusal strains
Data measured at different incremental depth
x-displacement field
y-displacement field
x z
y
z-displacement field
4th increment
x
y
z
1st increment 5th increment

Design Validation and Optimization
1 2 3 4 5
7
8
12
9
10
11
14
15
16
17
6
13
1 2 3 4 5
7
8
12
9
10
11
14
15
16
17
6
13
+
F1
F2
F1
F2
Stra
in (1
.0e-
03)
Stra
in (1
.0e-
03)
0
2
4
6
8
10
12
1 4 7 10 13 16
Measurement (1e-05)Simulation(1e-05)Error(1e-05)
Stra
in (1
.0e-
05)
Location0
2
4
6
8
10
12
1 4 7 10 13 16
Measurement (1e-05)Simulation(1e-05)Error(1e-05)
Stra
in (1
.0e-
05)
Location
3D-ESPI Sensor
Lift Lug Strain Measurement on a Die Set (ESPI v/s FEM)
FEA Model
Measurement at the pin position
Measurement result (ESPI)
Locations for comparison
Relative Error at the locations between ESPI and
FEM
Simulation (FEM-data)

Determination of Material Properties
Notched aluminum specimen in tensile test
Vibration Analysis
Vibration Modes of an Impeller
1543 Hz
4121 Hz
1708 Hz
1980 Hz
2759 Hz
4472 Hz
8536 Hz