Embed Size (px)
Citation preview

How to build a robot
Sander van DijkKunstmatige Intelligentie
Rijksuniversiteit Groningen2005
Overzicht
RoboChallenge Wijze inzichten Onderdelen Intelligentie Problemen Resultaten

RoboChallenge
Georganiseerd door Startel Tweede editie 23 inschrijvingen

RoboChallenge

RoboChallenge
3 Missies• 10 Groene Reuzen (kwalificatie)
• 5 verschillende sterren
• 7 van iedere soort, meerdere robots

RoboChallenge
Actief systeem• Precissie mogelijk
• Stoerheidsfactor
Passief systeem• Precissie niet nodig
• Sneller
• Simpeler

Wijze inzichten
Ervaring van vorig jaar• Alles wat kapot kan gaan, gaat kapot
• Totale prestatie is niet de som, maar het product van de prestatie van de onderdelen
Dus:• Houd het simpel
• Zorg dat de basis goed is, ga dan pas naar de volgende laag
Onderdelen
Lichaam Sensoren Brein Actuatoren

Onderdelen
Lichaam• ‘Embodied Intelligence’: Gedrag = Lichaam +
Intelligentie
• Modulair
• Simpel

Onderdelen
Sensoren• Sharp IR afstandssensoren
• Logitech QuickCam 4000 Pro webcam

Onderdelen
Brein• Laptop
• 1.5GHz Celeron M
• 256 Mb RAM
• Mandrake Linux 10.1
• Atmel AVR Atmega8535• 16MHz (16 MIPS Throughout)
• 8kB Flash, 512 Bytes EEPROM, 512 Bytes SRAM
• 8 Ch., 10-bit ADC
• 4 x PWM
• RS232 Serial Interface
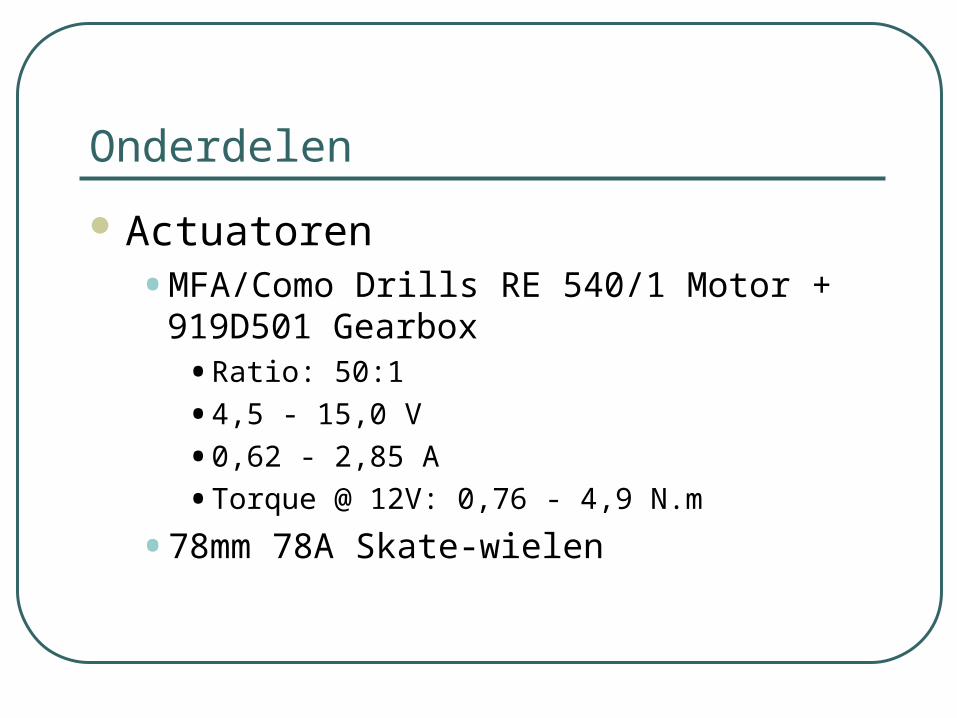
Onderdelen
Actuatoren• MFA/Como Drills RE 540/1 Motor + 919D501
Gearbox• Ratio: 50:1
• 4,5 - 15,0 V
• 0,62 - 2,85 A
• Torque @ 12V: 0,76 - 4,9 N.m
• 78mm 78A Skate-wielen

Intelligentie
Behaviour based• Braitenberg
• Subsumption

Intelligentie

Intelligentie
Intelligentie
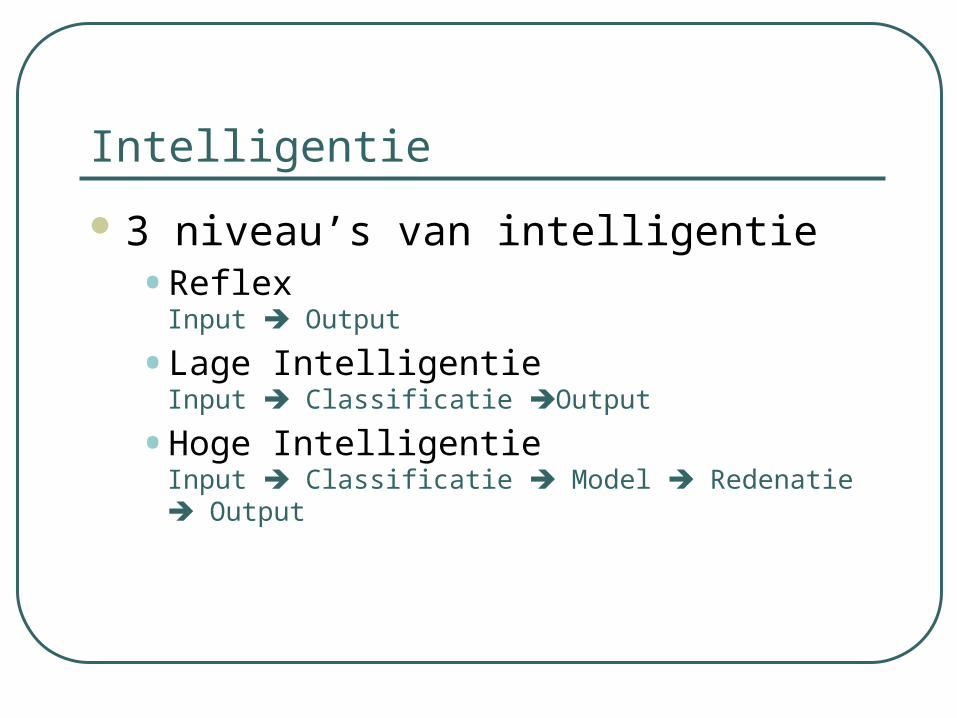
3 niveau’s van intelligentie• Reflex
Input Output
• Lage IntelligentieInput Classificatie Output
• Hoge IntelligentieInput Classificatie Model Redenatie Output

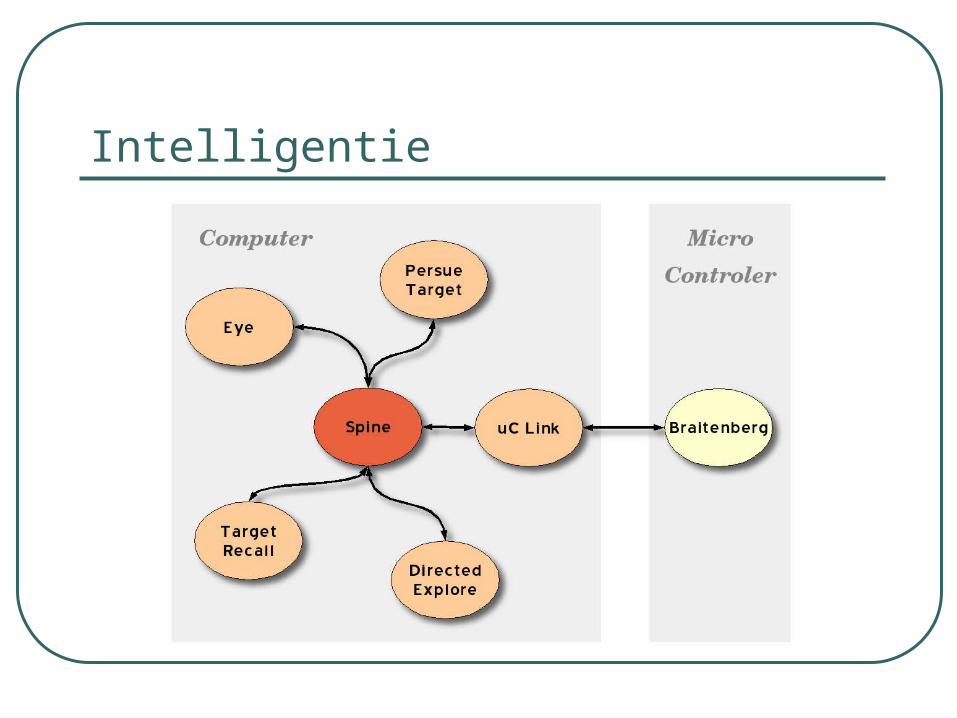
Intelligentie
Reflexen en laatste stap intelligentie op µC
Rest op computer• Centrale server (‘Spine’)
• Programma per gedrag(sonderdeel)
Seriele verbinding
Intelligentie
Intelligentie
Eye• Webcam interface
• Filters
• Regioning

Intelligentie
Image filters• Traditioneel: serieel
Image Filter1 Filter2 ...
• Eye: ‘parallel’Image||||||||||Filter1||||||||||Filter2||||||||||
...

Intelligentie
Kleurclassificatie• Bayes:
• 3D Histogram
• Classificaties van te voren berekenen
• Leer ook wat hij niet moet zien
)(
)()|()|(
EP
CPCEPECP
Intelligentie
Regioning• Run Length Encoding
• Tree Based Union-Find met padcompressie
• J. Bruce, T. Balch, M. Veloso (2000): Fast and Cheap Color Image Segmentation for Interactive Robots.
• http://www.ai.rug.nl/~sgdijk/gir/
Problemen
Wederom: alles wat kapot kan gaan gaat kapot• Computers met kuren
• Los wiel
• Instortende V-vorm
• Inferentie motoren• Onbetrouwbare sensoren
• Resettende/crashende µC
Resultaten
Herbruikbaar systeem (hardware + software)
Real time vision (30 fps) en gedrag Kwart finale behaald Veel kennis
Vragen