Embed Size (px)
Citation preview
Mehatronika: pregled i primjeri1 / 46
HRVATSKO DRUŠTVO ZA MEHANIKU
MEHATRONIKA: PREGLED I PRIMJERI
Prof.dr.sc. Joško PetrićFakultet strojarstva i brodogradnje
Sveučilište u Zagrebu
Mehatronika: pregled i primjeri2 / 46
Pregled
Povijesni osvrt
Definicije
Primjene
Povratna veza
Primjeri
Sadržaj
Mehatronika: pregled i primjeri3 / 46
• Popularan izraz: svi već imamo neku vlastitu sliku o tome, obzirom na iskustvo i susretanje s mehatronikom
• Puno definicija i shvaćanja pojma: uglavnom svode se na to da je mehatronika integracija mehanike (strojarstva), elektronike i informatike kako bi se njihovom sinergijom dobili bolji proizvodi ili proizvodni procesi.
Mehatronika: pregled i primjeri4 / 46
• 1969., Tetsuo Mori, Yaskawa Electric Co., Japan, aplikacija za zaštićeni znak (trademark): „Riječ
mehatronika („mechatronics“) sastavljena je od „mecha“ što dolazi od mehanizma i „tronics“ od
elektonike. Drugim riječima, tehnologije i razvijeni proizvodi sadržavati će sve više i više
elektronike unutar mehanizama, koji će se prožimati, tako da će biti nemoguće reći gdje jedan
počinje, a drugi završava.“
• Tada se radilo o elektromehaničkim sustavima i servo-sustavima, ne uključujući složenije vođenje ili računala (automatska klizna vrata, automatska garažna vrata, i sl.)
• Izraz mehatronika ne pobuđuje veću pažnju do početka 80-tih
• 1971. Intel 4004 µp, zatim 8008, paralelno se razvijaju µc, još su vrlo skupi
• 80- tih izraz se polako popularizira, pogotovo u Europi i Japanu, a manje u SAD (Yaskawa ne produžava prava na zaštićeni znak)
• 1993. g., prvi studij mehatronike na Hochschule Bochum, zatim Kiel, Augsburg, itd.
• 90-tih, časopisi i konferencije pod okriljem IEEE, ASME, IFAC, itd.
Povijesni osvrt
Mehatronika: pregled i primjeri5 / 46
Povijesni osvrt
• Kraj 70-tih: Japansko društvo za promicanje strojogradnje (JSPMI) svrstalo je mehatroničke proizvode u četiri kategorije:
– Class I: Prvenstveno mehanički proizvodi s uključenom elektronikom radi poboljšanja funkcionalnosti (NC alatni strojevi, pogoni s varijabilnom brzinom gibanja)
– Class II: Tradicionalni mehanički proizvodi sa značajno unaprijeđenim funkcijama pomoću elektronike (šivaći strojevi, automatizirani proizvodni sustavi)
– Class III: Proizvodi koji zadržavaju funkcionalnost tradicionalnog mehaničkog, ali unutarnji mehanizam je zamijenjen elektronikom (digitalni sat)
– Class IV: Proizvodi projektirani sinergijskom integracijom mehanike i elektronike (fotokopirni strojevi, inteligentne perilice i sušilice, fotoaparati, automatske pećnice)
Mehatronika: pregled i primjeri6 / 46
Definicije
• Časopis „Mechatronics“, IFAC: „Mehatronika je sinergijska kombinacija precizne mehanike,
elektroničkog upravljanja i sustavnog razmišljanja prilikom projektiranja proizvoda i
proizvodnih procesa. Odnosi se na projektiranje sustava, uređaja i proizvoda koji bi na taj
način trebali postići optimalnu ravnotežu između osnovne mehaničke konstrukcije i njegovog
sveukupnog vođenja.
• Prof. Rizzoni, Ohio State: „Mehatronika je sjecište tradicionalnih metoda projektiranja sa
primjenom senzora, aktuatora, mikroprocesora i softvera. Na taj način postiže se veća
fleksibilnost proizvoda ili procesa, lako se reprogramiraju ili preoblikuju, a može se primjeniti
automatsko prikupljanje podataka i nadzor.“
• Prof. Tomizuka, Berkeley (ex urednik IEEE/ASME Trans. of Mechatronics): „Mehatronika u
stvari nije ništa novo nego dobra praksa u projektiranju. Osnovna ideja je primijeniti nove
metode vođenja da bi se podigao nivo svojstava nekog mehaničkog uređaja. Sloboda u
projektiranju se povećava, a rezultati mogu biti znatno bolji ako se imaju na umu i drugi
načini mimo uobičajenog, čisto mehaničkog pristupa.“
Mehatronika: pregled i primjeri7 / 46
Definicije
• Prof. Bolton: „Mehatronički sustav nije samo brak između električnog i mehaničkog sustava, a također je više nego sustav vođenja; to je potpuna integracija svega toga.“
• Prof. Auslander, Berkeley: “Bilo koji sustav u kojem upravljate snagom ili prilagođavate
snagu je kandidat za vođenje računalom. Naime, za bilo koju mehaničku komponentu
može se pitati što je njena svrha? Da li prenosi snagu? Ili je njena uloga upravljanje i
koordinacija (usklađivanje) snage? Ovu drugu funkciju općenito mnogo efikasnije
(jednostavnije, jeftinije i fleksibilnije) obavljaju računala, softver i elektronika“
Mehatronika: pregled i primjeri8 / 46
Definicije
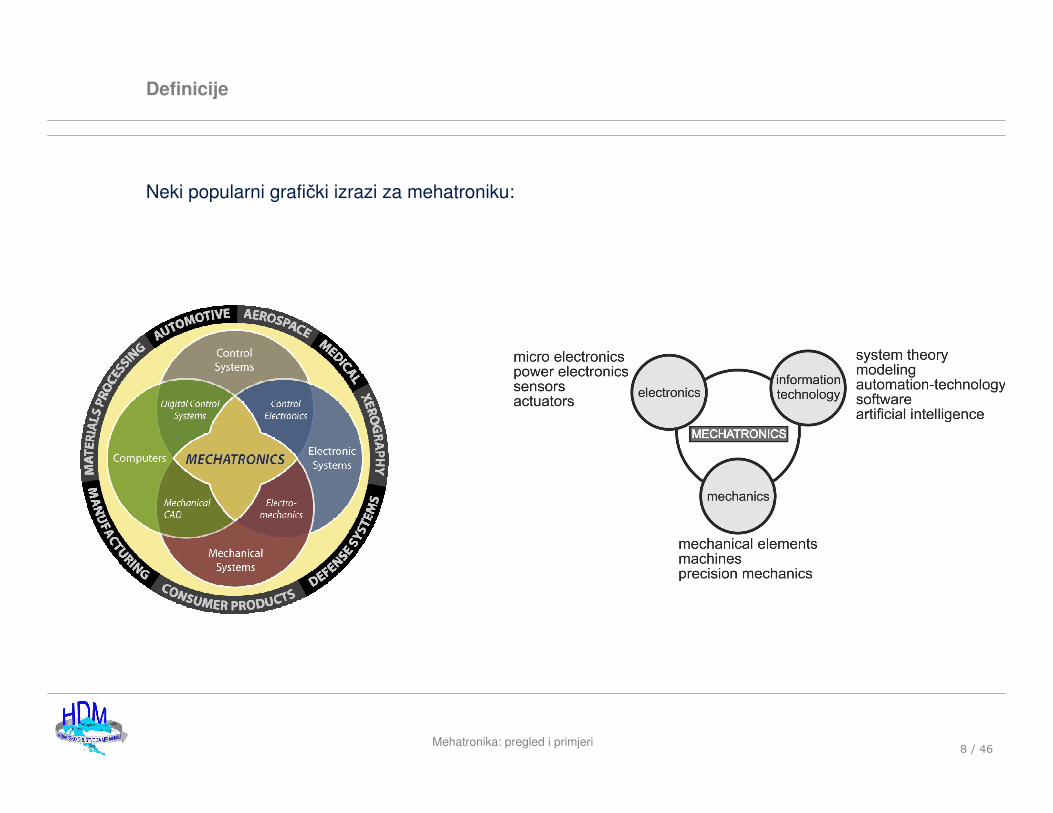
Neki popularni grafički izrazi za mehatroniku:
Mehatronika: pregled i primjeri9 / 46
Primjene
• Dakle: osnova je mehanički sustav koji nadgradnjom (elektronika, vođenje) dobiva novu
kvalitetu. Međutim, takvom sustavu treba pristupati integralno.
• Neke karakteristične primjene i primjeri mehatroničkih proizvoda: fotoaparati i kamere,
hard-diskovi, printeri, transportna sredstva (automobili, zrakoplovi), segway (primjer
proizvoda koji ne bi niti postojao da nije mehatronike, ..), sustavi za aktivno prigušenje
vibracija, roboti, ...
• Zamislimo proizvode prije i nakon mehatronike (pisači stroj vs. printer + računalo;
mehanički upravljana pumpa vs. common rail; pomoćni sustavi pogonjeni remenom vs.
decentralizirani pomoćni sustavi s vlastitim pogonom; ručni mjenjač automobila vs.
automatski mjenjač s dvostrukom spojkom, ... )
Mehatronika: pregled i primjeri10 / 46
Primjene
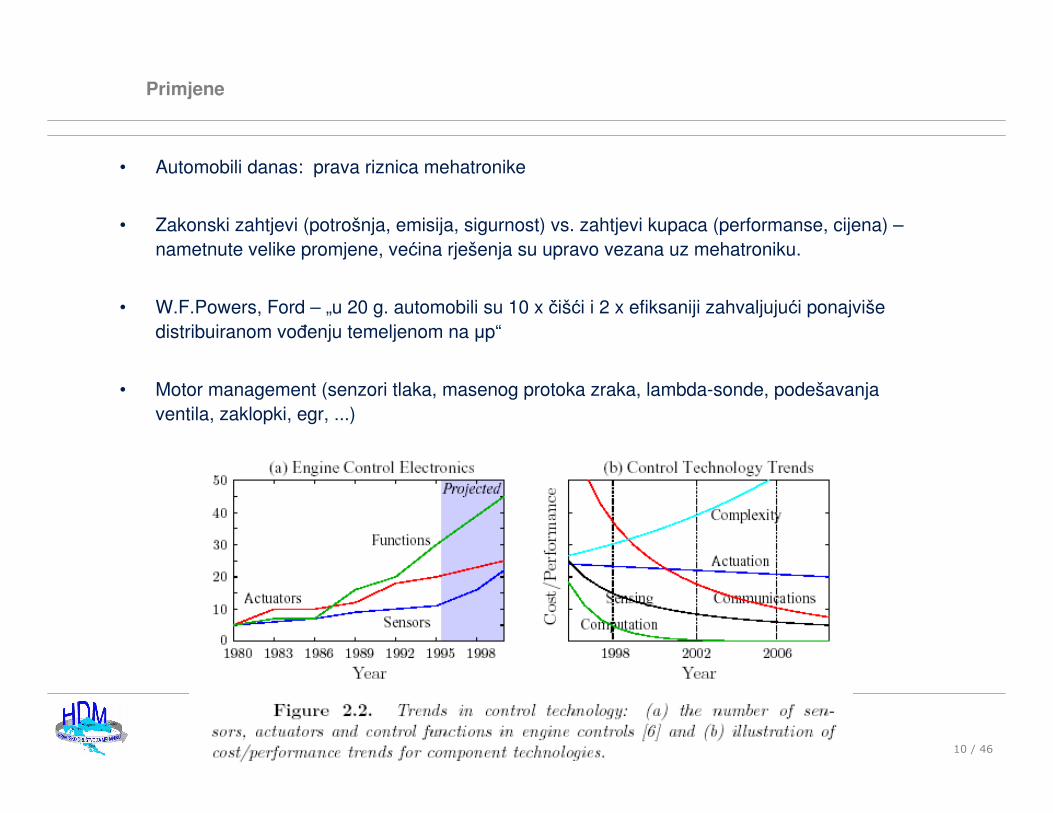
• Automobili danas: prava riznica mehatronike
• Zakonski zahtjevi (potrošnja, emisija, sigurnost) vs. zahtjevi kupaca (performanse, cijena) –nametnute velike promjene, većina rješenja su upravo vezana uz mehatroniku.
• W.F.Powers, Ford – „u 20 g. automobili su 10 x čišći i 2 x efiksaniji zahvaljujući ponajviše distribuiranom vođenju temeljenom na µp“
• Motor management (senzori tlaka, masenog protoka zraka, lambda-sonde, podešavanja ventila, zaklopki, egr, ...)
Mehatronika: pregled i primjeri11 / 46
Primjene
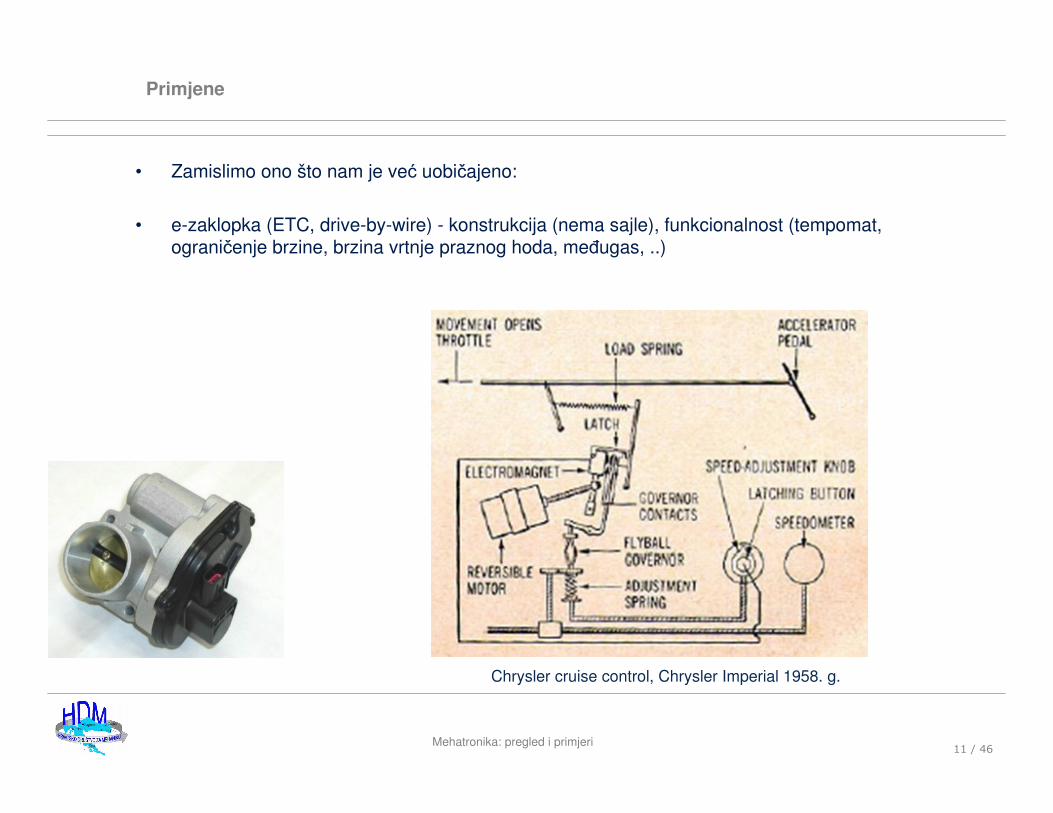
• Zamislimo ono što nam je već uobičajeno:
• e-zaklopka (ETC, drive-by-wire) - konstrukcija (nema sajle), funkcionalnost (tempomat, ograničenje brzine, brzina vrtnje praznog hoda, međugas, ..)
Chrysler cruise control, Chrysler Imperial 1958. g.
Mehatronika: pregled i primjeri12 / 46
Primjene
• Poznati akronimi: ABS, TCS, ESP, ...
• Zamislimo steer-by-wire sustav – legislativa ne dozvoljava – konstrukcijske slobode
(nema stupa - sigurnost, upravljač lijevo, desno, vani?!, ..) – problemi veliki (sigurnost,
vjerna emulacija opterećenja ruku)
• Zamislimo hibridno vozilo - konstrukcijski utjecaji (smještaj baterija, smještaj dodatnih
pogona naprijed, nazad, u kotačima, dodatna masa i njen utjecaj na ovješenje);
funkcionalni utjecaji – (bezbroj, pitanje kočenja - npr. puna baterija, kako će kočiti
generator, itd… rješenje veća baterija, dakle veća masa, veći prostor, veća skupoća;
pitanje smještaja motora u kotačima, različitim momentima može se vrtiti vozilo, ali
neovješene mase se povećavaju, hlađenje,..)
• Dakle ako svaki ovaj proizvod zamislite bez integracije s vođenjem i elektronikom – to je
naprosto drugi proizvod, gledajući ga i s funkcionalnog, ali i konstrukcijskog aspekta
Mehatronika: pregled i primjeri13 / 46
Primjene
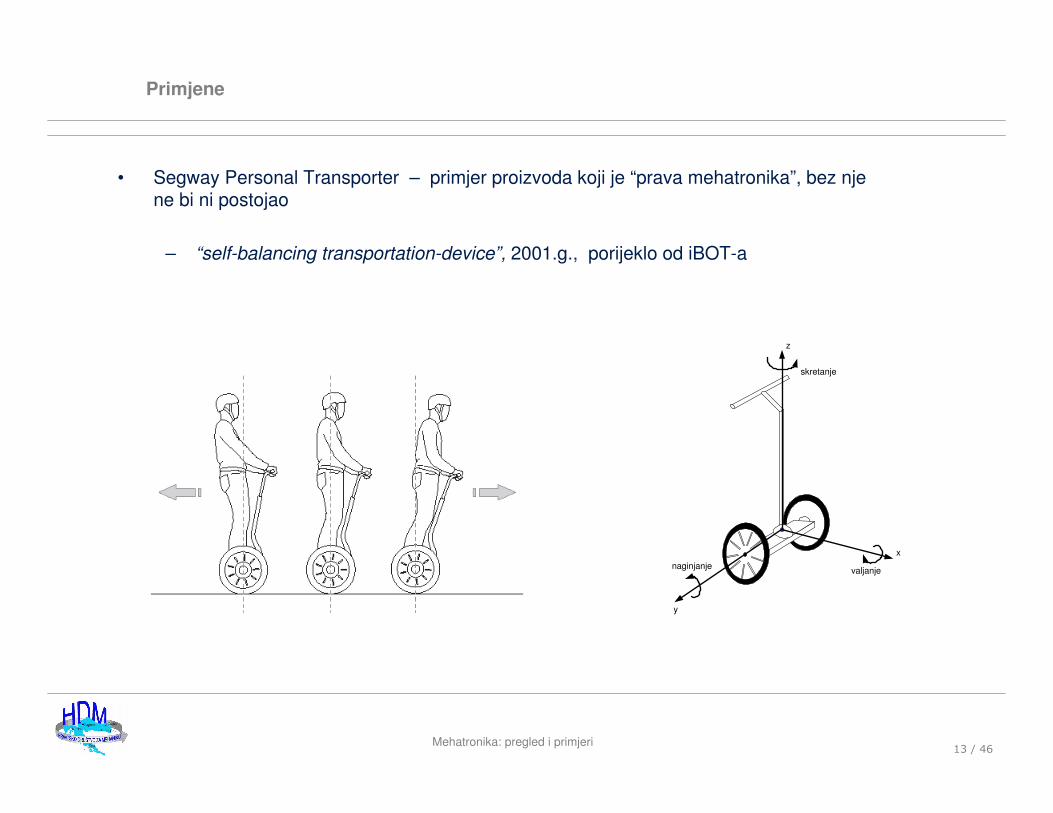
• Segway Personal Transporter – primjer proizvoda koji je “prava mehatronika”, bez nje ne bi ni postojao
– “self-balancing transportation-device”, 2001.g., porijeklo od iBOT-a
z
y
x
valjanje
skretanje
naginjanje
Mehatronika: pregled i primjeri14 / 46
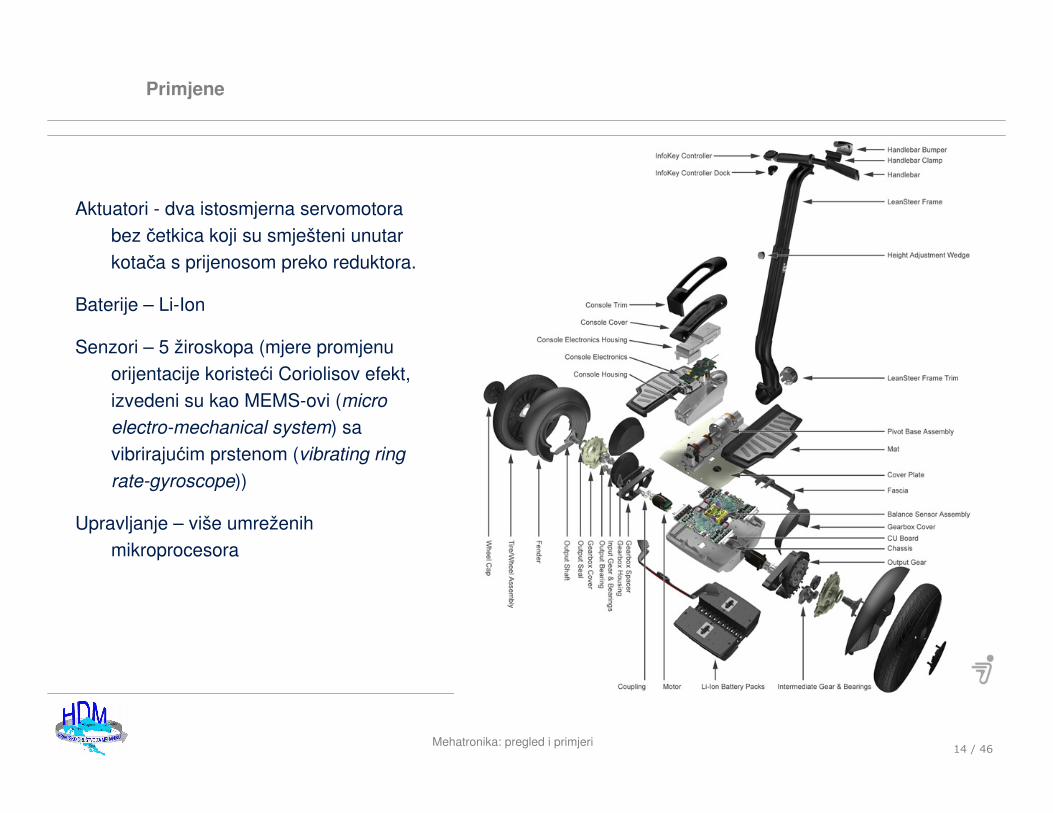
Primjene
Aktuatori - dva istosmjerna servomotora bez četkica koji su smješteni unutar kotača s prijenosom preko reduktora.
Baterije – Li-Ion
Senzori – 5 žiroskopa (mjere promjenu orijentacije koristeći Coriolisov efekt, izvedeni su kao MEMS-ovi (micro
electro-mechanical system) sa vibrirajućim prstenom (vibrating ring
rate-gyroscope))
Upravljanje – više umreženih mikroprocesora
Mehatronika: pregled i primjeri15 / 46
Primjene
• Zašto se mehatronika jako širi?
“Da bi bile konkurentne, firme moraju razvijati nove tehnologije da bi projektirale,
proizvodile i nudile tržištu nove proizvode. Mehatronika pomaže brzoj reakciji na
promjene, omogućava konkurentna svojstva proizvodu ili procesu i skraćuje proizvodni
ciklus – a sve to je nužnost bilo koje firme.”
• Sastavnice mehatronike:
– Modeliranje fizičkog sustava
– Senzori i aktuatori
– Vođenje (metode analize i sinteze vođenja)
– Računala (sučelja, mreže, arhitektura, PLC, op-amp)
– Softver i prikupljanje podataka (pretvornici, A/D i D/A, poboljšanje ili obradba signala („signal conditioning“ - pretvorba, pojačanje, filtriranje, izolacija..), instrumentacija)
Mehatronika: pregled i primjeri16 / 46
Povratna veza
• Zašto je kod projektiranja naprednih mehaničkih (dinamičkih) sustava jako važno
promatrati konstrukciju i vođenje cjelovito?
• Povratna veza (regulacija) – čvrsta veza s mehanikom, puno prije mehatronike i
elektronike
• Korijeni automatske regulacije vezani su uz mehaniku i općenito strojarstvo
– stari vijek (pra-počeci: vodeni sat, uljne lampe, ..)
– srednji vijek (satni mehanizam verge-and-foilot, ..)
– novi vijek (regulatori temperature, ..)
Mehatronika: pregled i primjeri17 / 46
Povratna veza
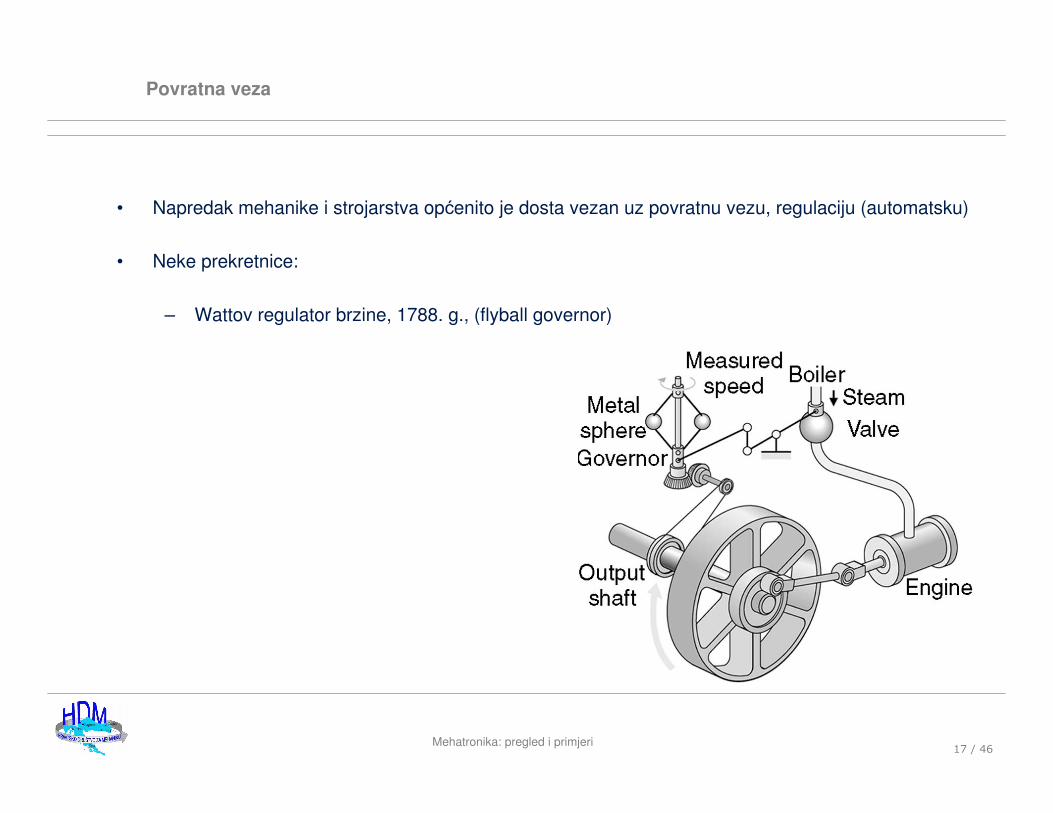
• Napredak mehanike i strojarstva općenito je dosta vezan uz povratnu vezu, regulaciju (automatsku)
• Neke prekretnice:
– Wattov regulator brzine, 1788. g., (flyball governor)
Mehatronika: pregled i primjeri18 / 46
Povratna veza
– Zrakoplovstvo, prvi uspješni let braće Wright, 1903. g.
Mehatronika: pregled i primjeri19 / 46
Povratna veza
– Žiroskopi, Sperry je konstruirao automatski pilot za zrakoplove na bazi signala iz
žiroskopa (el.signal – stlačeni zrak – krilca) 1909.g.
Mehatronika: pregled i primjeri20 / 46
Povratna veza
• Što omogućava povratna veza (neka zadivljujuća svojstva):
– Može napraviti dobar sustav od loših elemenata
– Sustav može biti neosjetljiv na poremećaje i promjene svojih elemenata
– Može stabilizirati nestabilan sustav
– Može stvoriti neko poželjno ponašanje sustava (npr. linearno ponašanje sustava iz nelinearnih komponenti)
• Koji je problem povratne veze (gdje leži opasnost):
– Može unijeti nestabilnost (i od stabilnog sustava može postati nestabilan)
• Postoje neka temeljna ograničenja što se može postići povratnom vezom, a vezana su uz konstrukciju, i uz smještaj aktuatora i senzora!
(Dakako, ograničenja postoje vezana i uz kvalitetu sustava vođenja.)
Mehatronika: pregled i primjeri21 / 46
Povratna veza
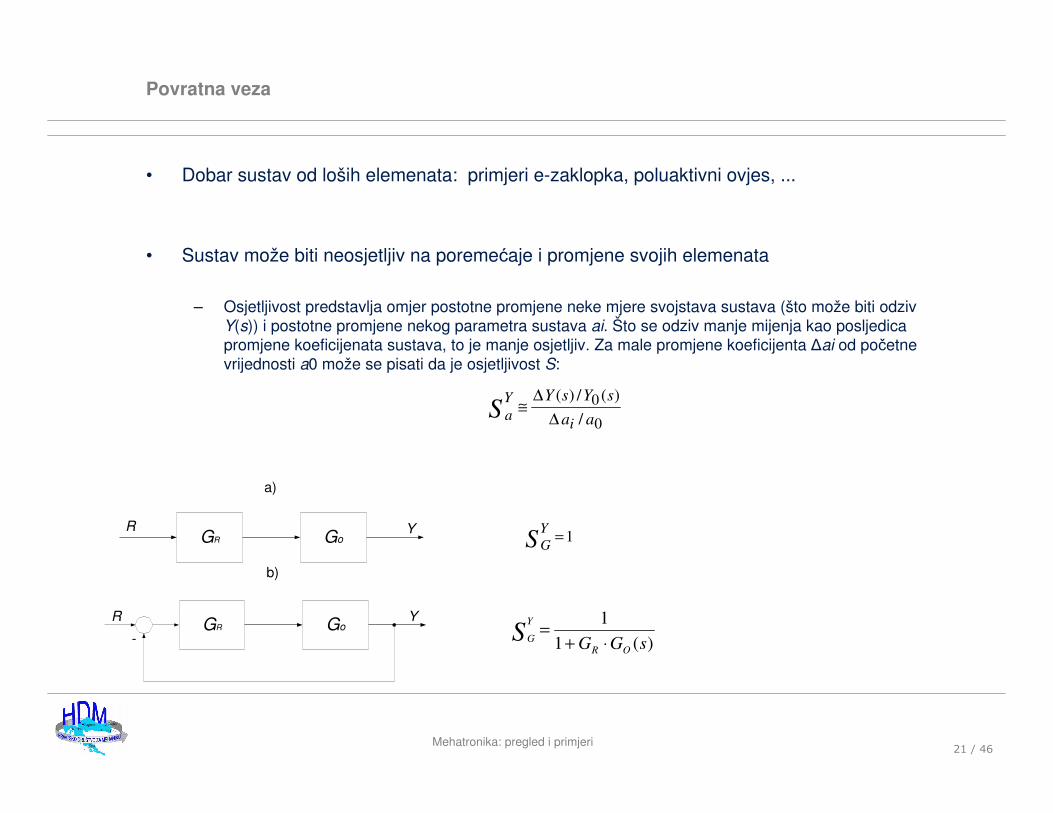
• Dobar sustav od loših elemenata: primjeri e-zaklopka, poluaktivni ovjes, ...
• Sustav može biti neosjetljiv na poremećaje i promjene svojih elemenata
– Osjetljivost predstavlja omjer postotne promjene neke mjere svojstava sustava (što može biti odzivY(s)) i postotne promjene nekog parametra sustava ai. Što se odziv manje mijenja kao posljedica promjene koeficijenata sustava, to je manje osjetljiv. Za male promjene koeficijenta ∆ai od početnevrijednosti a0 može se pisati da je osjetljivost S:
0
0
/
)(/)(
aa
sYsY
i
Y
aS ∆
∆≅
RGR Go
Y
RGR Go
Y
-
a)
b)
1=SY
G
)(1
1
sGG OR
Y
GS⋅+
=
Mehatronika: pregled i primjeri22 / 46
Povratna veza
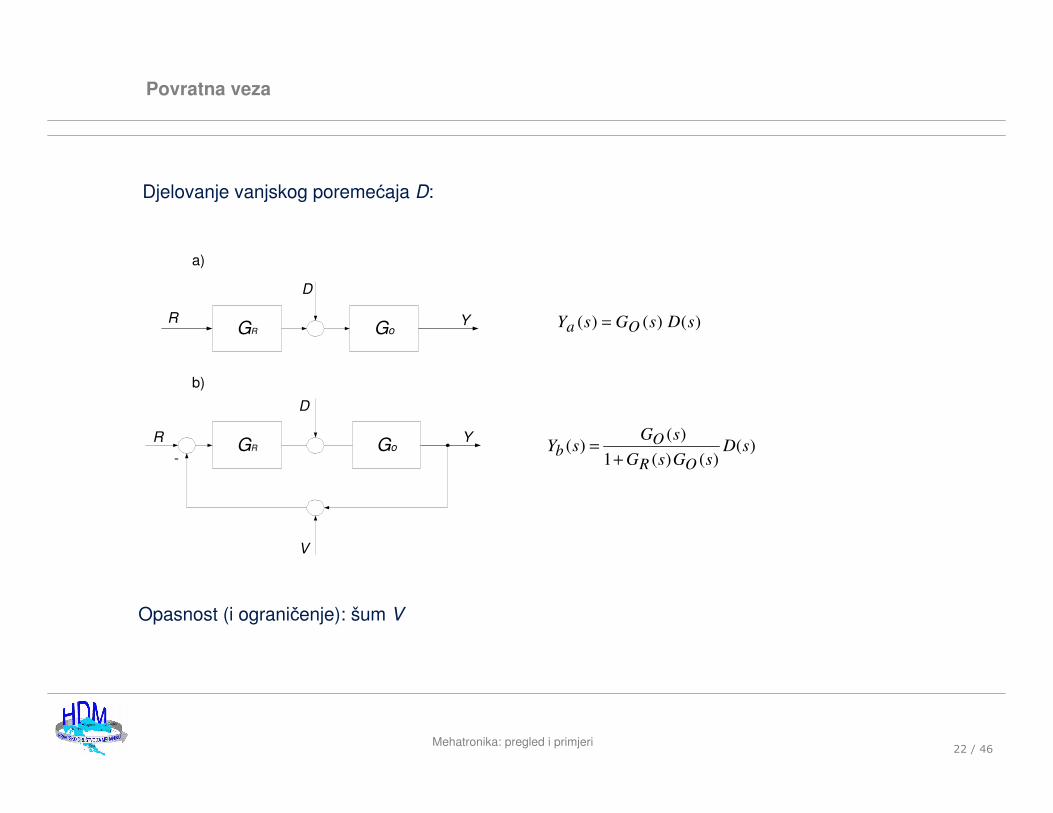
Djelovanje vanjskog poremećaja D:
RGR Go
Y
RGR Go
Y
-
a)
b)
D
D
V
Opasnost (i ograničenje): šum V
)()()( sDsGsY Oa =
)()()(1
)()( sD
sGsG
sGsY
OR
Ob
+=
Mehatronika: pregled i primjeri23 / 46
Povratna veza
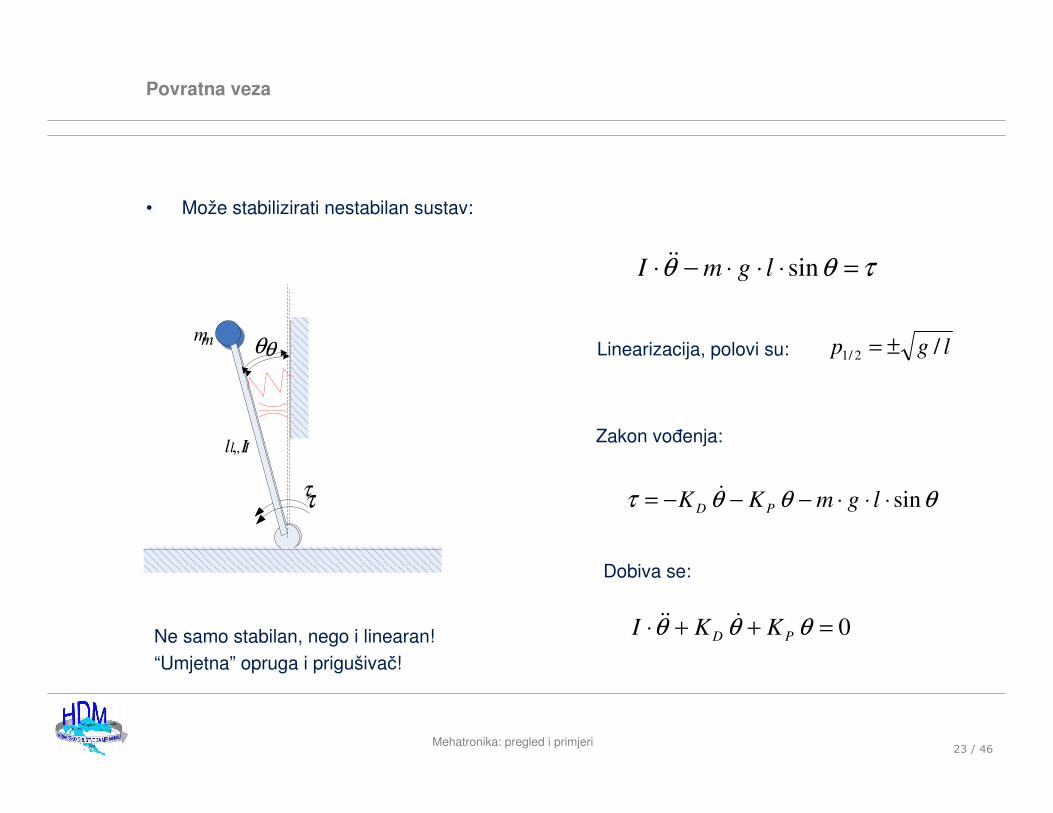
• Može stabilizirati nestabilan sustav:
θ
Il ,
m
τ
τθθ =⋅⋅⋅−⋅ sinlgmI &&
lgp /2/1 ±=
θθθτ sin⋅⋅⋅−−−= lgmKK PD&
Linearizacija, polovi su:
Zakon vođenja:
Dobiva se:
0=++⋅ θθθ PD KKI &&&
θ
Il ,
m
τ
Ne samo stabilan, nego i linearan!“Umjetna” opruga i prigušivač!
Mehatronika: pregled i primjeri24 / 46
Povratna veza
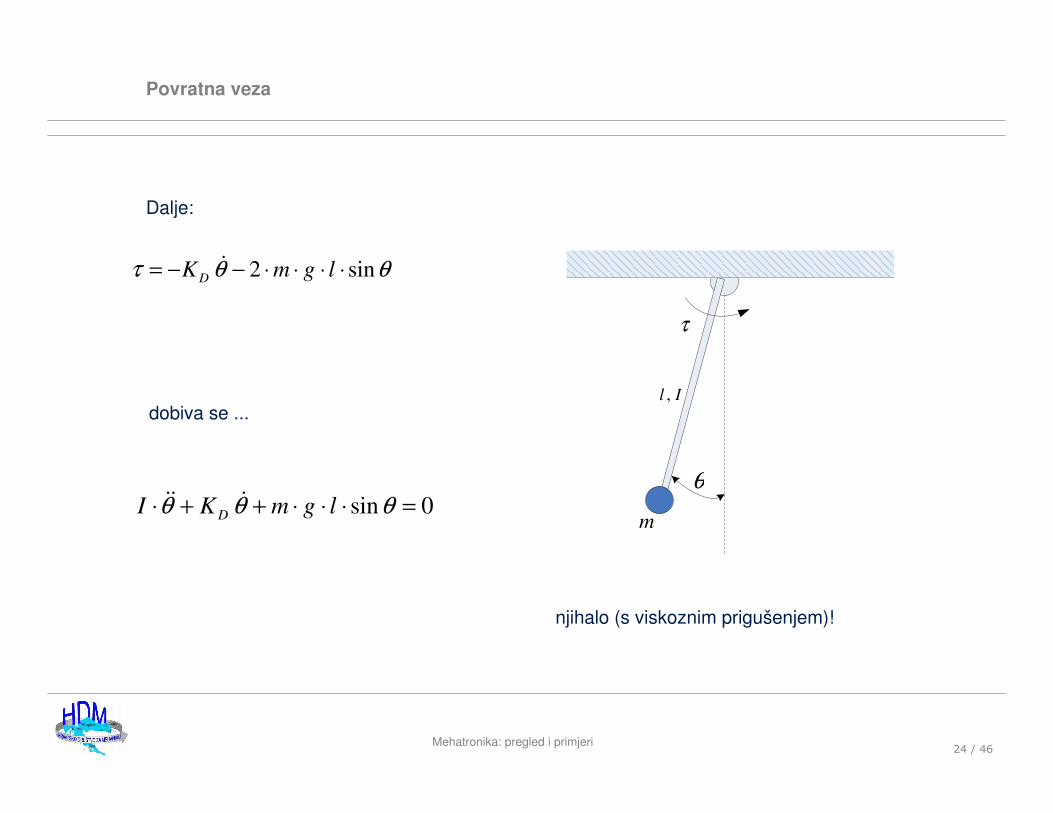
Dalje:
θθτ sin2 ⋅⋅⋅⋅−−= lgmKD&
dobiva se ...
0sin =⋅⋅⋅++⋅ θθθ lgmKI D&&&
njihalo (s viskoznim prigušenjem)!
θ
Il ,
m
τ
Mehatronika: pregled i primjeri25 / 46
Povratna veza
• Može stvoriti neko poželjno ponašanje sustava: npr. linearno od nelinearnog (prethodni
primjer, ali i primjeri sa samog početka automatike – vodeni sat)
• Opasnost povratne veze: duboko mijenja sustav, i od stabilnog sustava može postati
nestabilan (kašnjenja; šum senzora ili vodeće veličine sa derivacijskim ili čak
proporcionalnim djelovanjem regulatora mogu biti jako potencirane; preveliko traženje od
ograničenih aktuatora (integrator windup), prevelika pojačanja, itd.)
Mehatronika: pregled i primjeri26 / 46
Povratna veza
• Temeljna ograničenja svojstava koja se mogu postići povratnom vezom:– pitanje smještaja polova i nula, odnosno pitanje stabilnosti (fazna-neminimalnost) –
pitanje konstrukcije
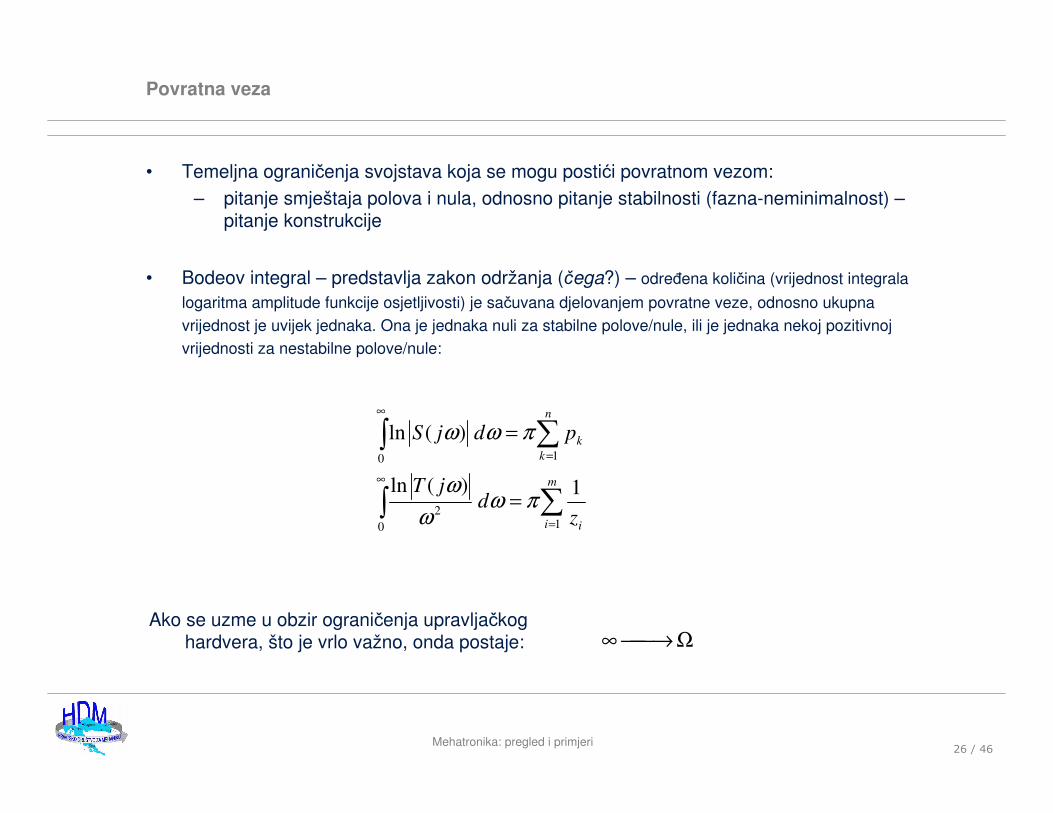
• Bodeov integral – predstavlja zakon održanja (čega?) – određena količina (vrijednost integrala
logaritma amplitude funkcije osjetljivosti) je sačuvana djelovanjem povratne veze, odnosno ukupna vrijednost je uvijek jednaka. Ona je jednaka nuli za stabilne polove/nule, ili je jednaka nekoj pozitivnoj vrijednosti za nestabilne polove/nule:
∑∫
∑∫
=
∞
=
∞
=
=
m
i i
n
k
k
zd
jT
pdjS
10
2
10
1)(ln
)(ln
πωω
ω
πωω
Ako se uzme u obzir ograničenja upravljačkog hardvera, što je vrlo važno, onda postaje: Ω→∞
Mehatronika: pregled i primjeri27 / 46
Povratna veza
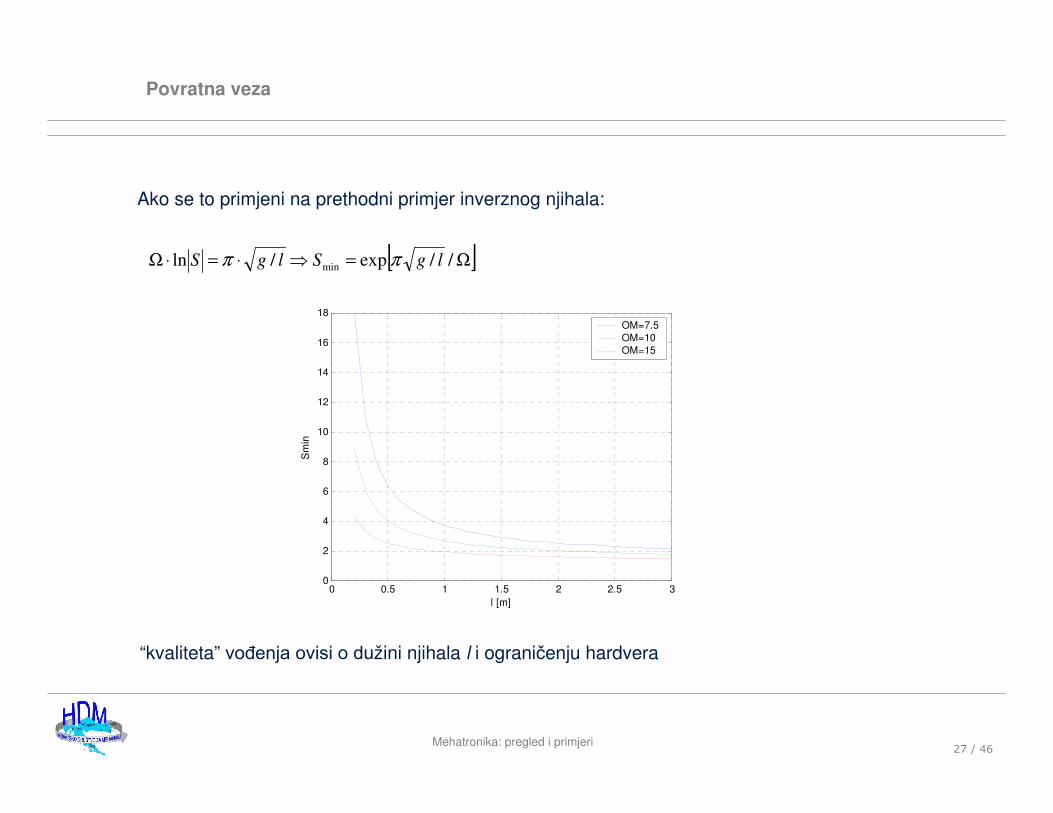
Ako se to primjeni na prethodni primjer inverznog njihala:
[ ]Ω=⇒⋅=⋅Ω //exp/ln min lgSlgS ππ
“kvaliteta” vođenja ovisi o dužini njihala l i ograničenju hardvera
0 0.5 1 1.5 2 2.5 30
2
4
6
8
10
12
14
16
18
l [m]
Sm
in
OM=7.5OM=10OM=15
Mehatronika: pregled i primjeri28 / 46
Povratna veza
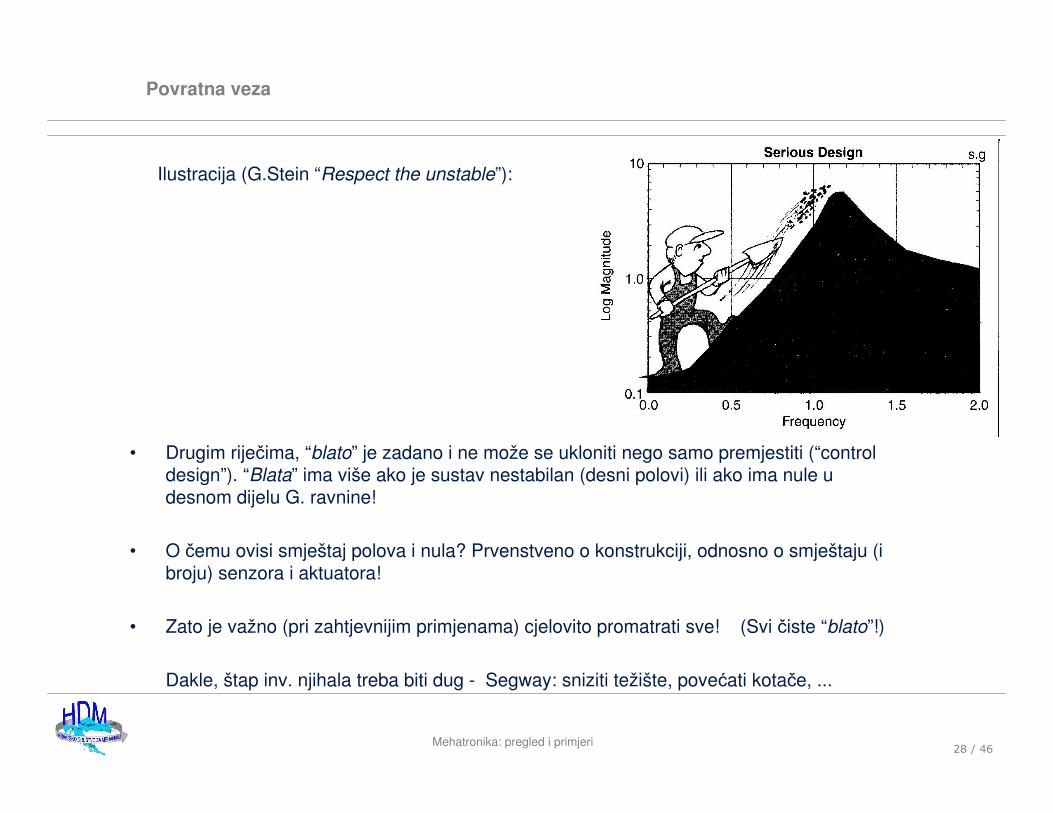
Ilustracija (G.Stein “Respect the unstable”):
• Drugim riječima, “blato” je zadano i ne može se ukloniti nego samo premjestiti (“control design”). “Blata” ima više ako je sustav nestabilan (desni polovi) ili ako ima nule u desnom dijelu G. ravnine!
• O čemu ovisi smještaj polova i nula? Prvenstveno o konstrukciji, odnosno o smještaju (i broju) senzora i aktuatora!
• Zato je važno (pri zahtjevnijim primjenama) cjelovito promatrati sve! (Svi čiste “blato”!)
Dakle, štap inv. njihala treba biti dug - Segway: sniziti težište, povećati kotače, ...
Mehatronika: pregled i primjeri29 / 46
Povratna veza
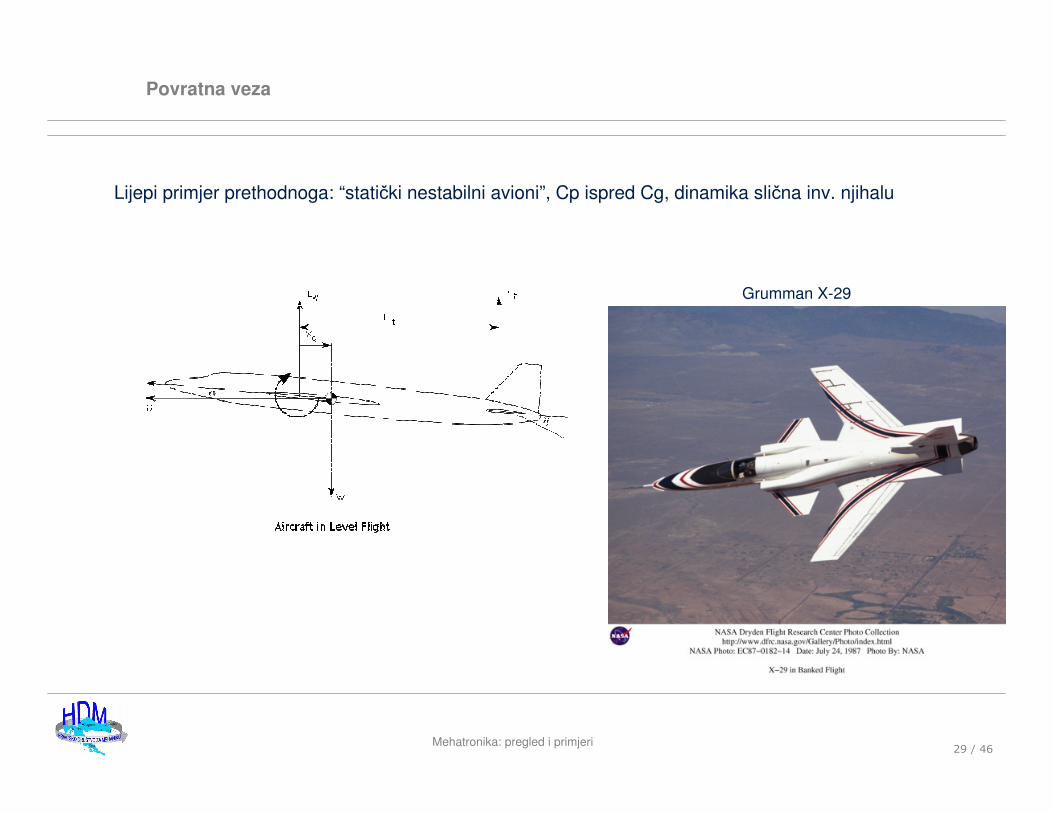
Lijepi primjer prethodnoga: “statički nestabilni avioni”, Cp ispred Cg, dinamika slična inv. njihalu
Grumman X-29
Mehatronika: pregled i primjeri30 / 46
Primjeri
• Primjeri su uzeti iz dijela aktivnosti Katedre za strojarsku automatiku (iz aktivnosti grupe za Upravljanje automobilskim sustavima – www.fsb.hr/acg )
• 2001. g., povratak prof. J.Deura iz Forda, početak sa dva projekta
• Prethodno djelovanje također vezano uz područje mehatronike
• Modeliranje, vođenje, estimacija - uglavnom primjena na automobilskim mehatroničkim sustavima
• Način: teorijski put i eksperimentalna potvrda (parametriranje i verifikacija)

Mehatronika: pregled i primjeri31 / 46
Dobro došli na web stranice istraživačke grupe
Upravljanje automobilskim sustavimaFakultet strojarstva i brodogradnje, Sveučilište u Zagrebu
I. Lučića 5, HR-10000 Zagreb, CROATIA
Mehatronika: pregled i primjeri32 / 46
Primjeri
Istraživanje:
Modeliranje Otto motora
Modeliranje automatske transmisije
Modeliranje uljnih spojki
Modeliranje dinamike aktivnih diferencijala
Modeliranje uljne spojke aktivnog diferencijala
Modeliranje magnetoreološke spojke
Modeliranje hidrostatičkog prijenosnika
Modeliranje trenja između autogume i ceste
Dinamički potencijal trenja autogume
Regulacija elektroničke zaklopke benzinskog motora
Procjena momenta tereta
Regulacija brzine vrtnje Ottovog motora u praznom hodu
Regulacija uljne spojke aktivnog diferencijala
Procjena sile trenja između autogume i podloge
Regulacija vuče/kočenja
Optimiranje integralnog upravljanja dinamikom vozila
Procjena brzine skretanja vozila
Ostala srodna istraživanja:
Regulacija elektromotornih pogona s elastičnim
prijenosnim mehanizmom, trenjem i
zračnošću.
Modeliranje i upravljanje fleksibilnim robotima
Mehatronički sustavi
Regulacija pneumatskih servo sustava
Mehatronika: pregled i primjeri33 / 46
Primjeri
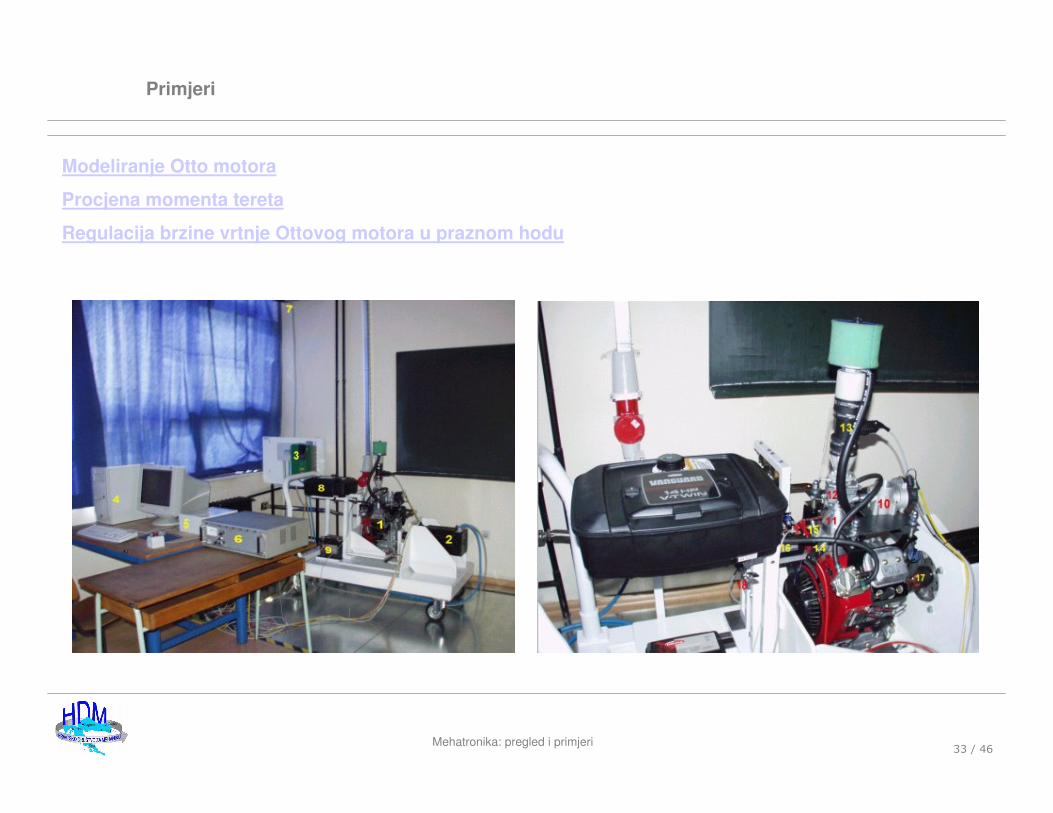
Modeliranje Otto motora
Procjena momenta tereta
Regulacija brzine vrtnje Ottovog motora u praznom hodu
Mehatronika: pregled i primjeri34 / 46
Primjeri
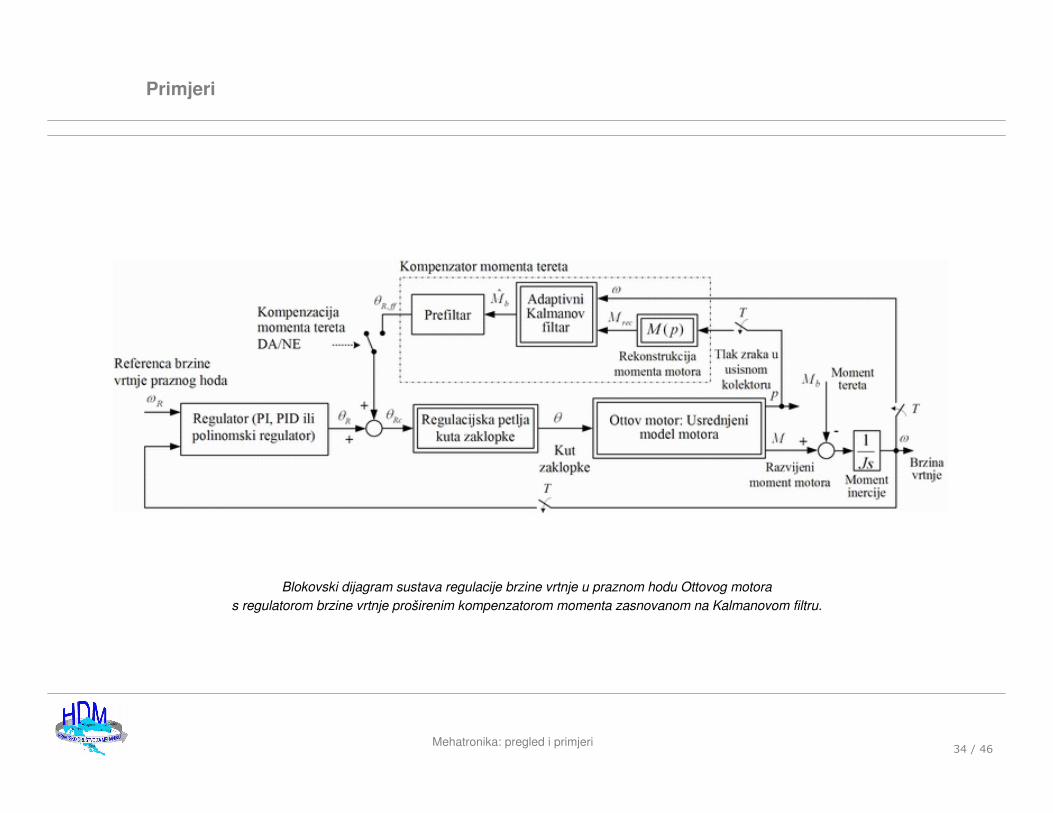
Blokovski dijagram sustava regulacije brzine vrtnje u praznom hodu Ottovog motora
s regulatorom brzine vrtnje proširenim kompenzatorom momenta zasnovanom na Kalmanovom filtru.
Mehatronika: pregled i primjeri35 / 46
Primjeri
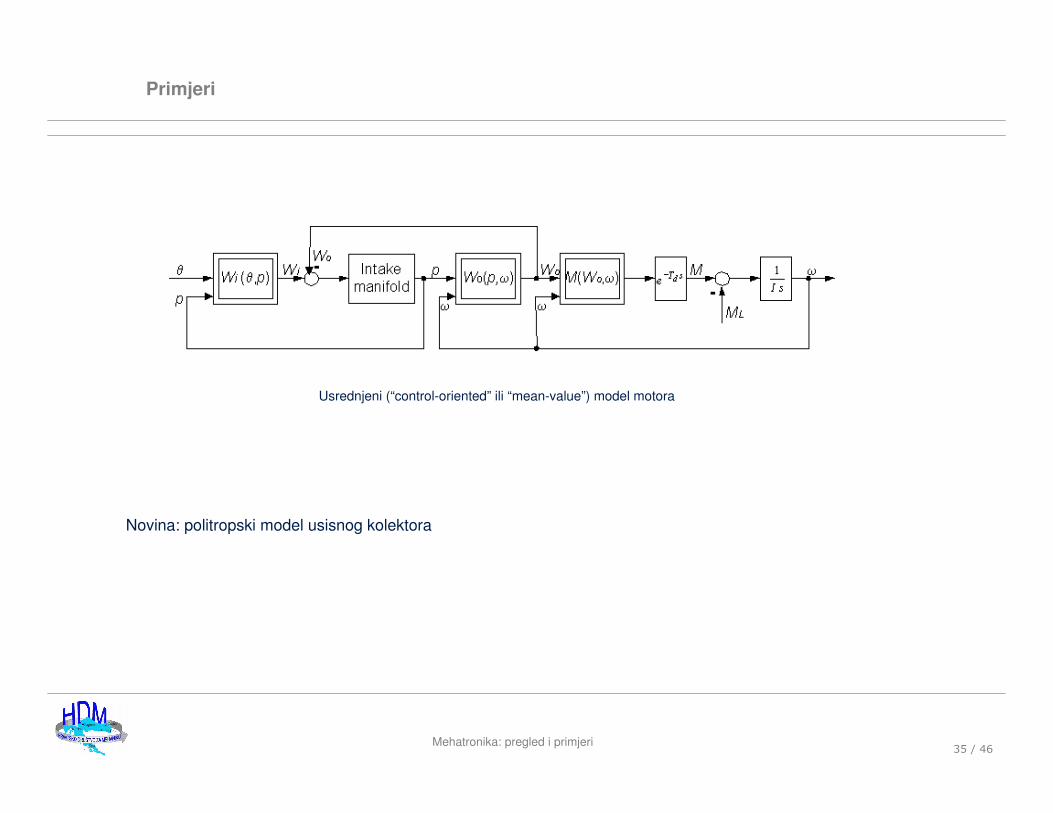
Usrednjeni (“control-oriented” ili “mean-value”) model motora
Novina: politropski model usisnog kolektora
Mehatronika: pregled i primjeri36 / 46
Primjeri
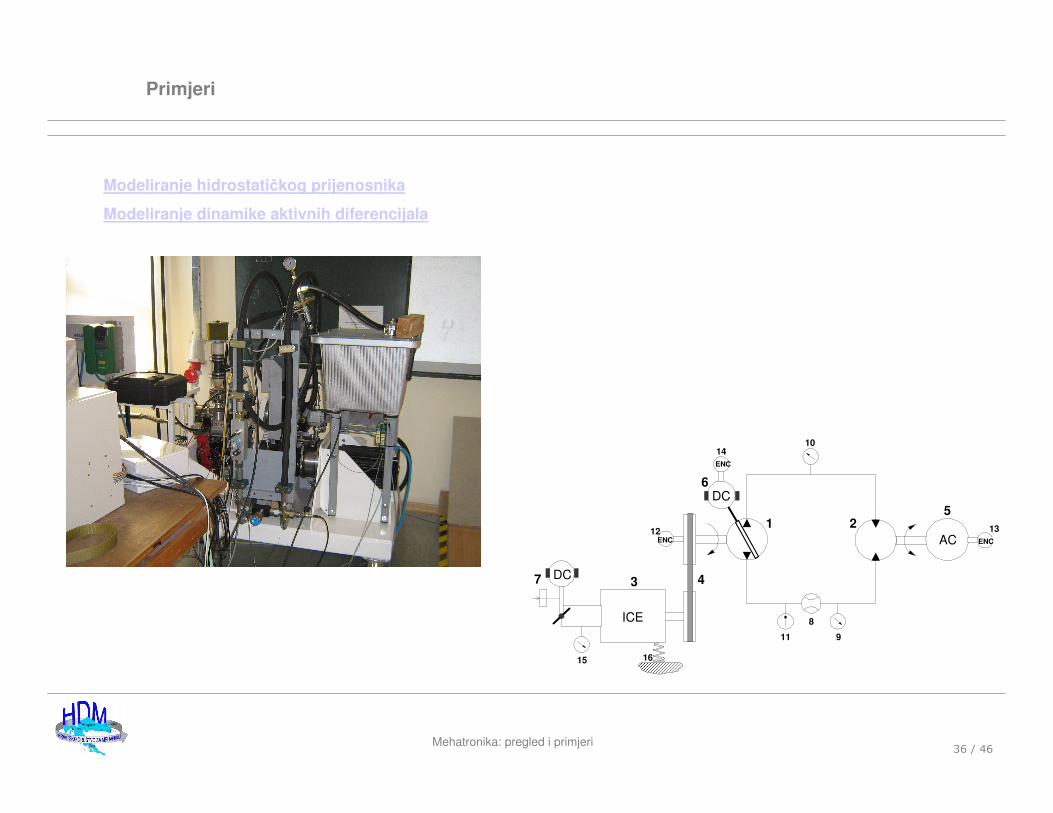
Modeliranje hidrostatičkog prijenosnika
Modeliranje dinamike aktivnih diferencijala
ICE
AC
DC
DC
ENC
ENC
ENC
1 2
3
5
6
7
8
9
10
11
12 13
14
15 16
4
Mehatronika: pregled i primjeri37 / 46
Primjeri
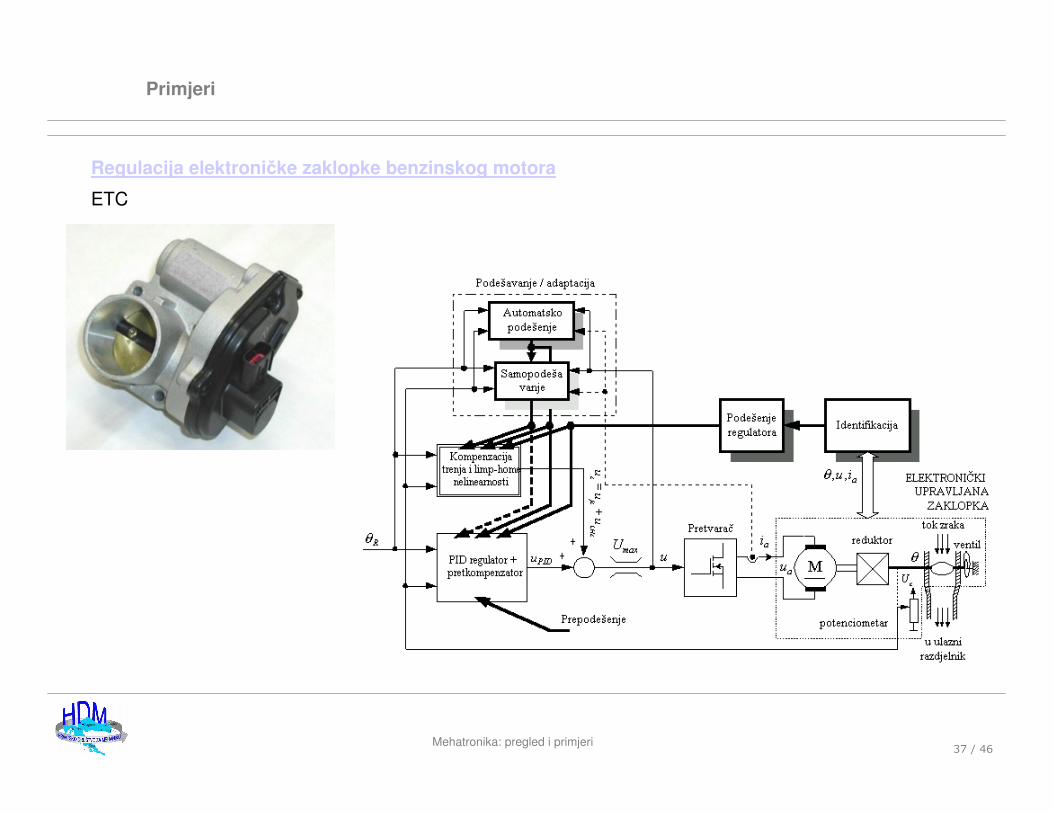
Regulacija elektroničke zaklopke benzinskog motora
ETC
Mehatronika: pregled i primjeri38 / 46
Primjeri
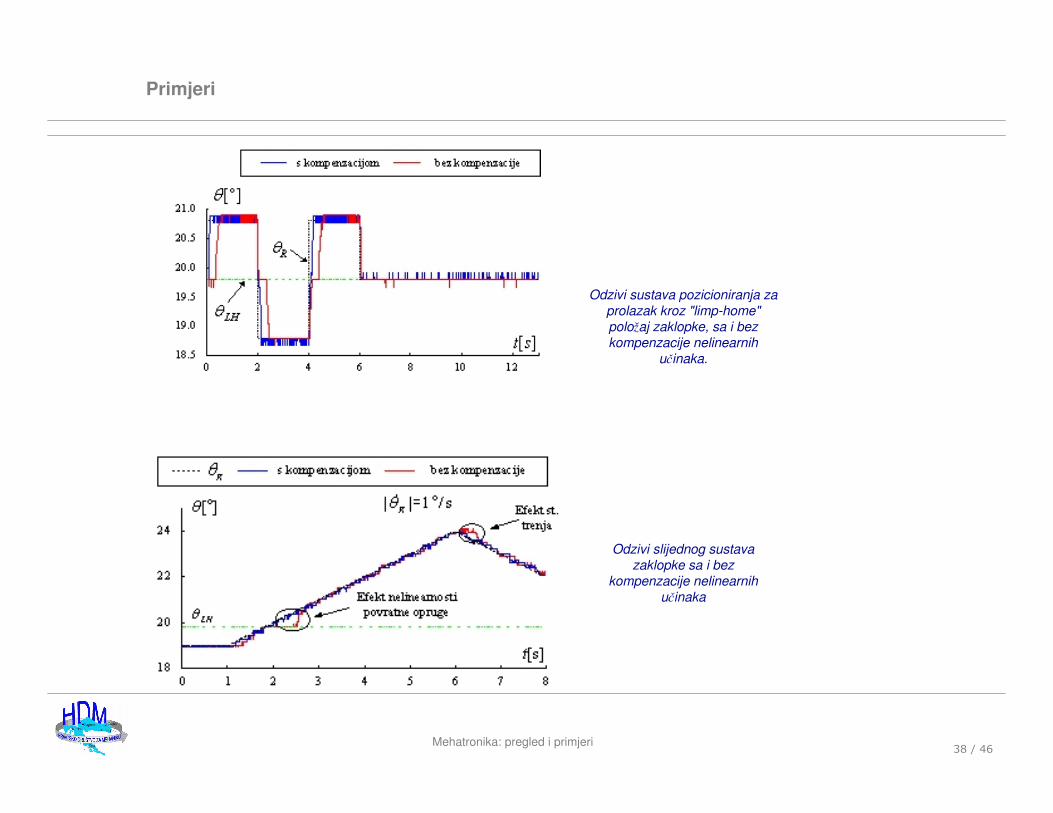
Odzivi slijednog sustava zaklopke sa i bez
kompenzacije nelinearnih učinaka
Odzivi sustava pozicioniranja za prolazak kroz "limp-home" položaj zaklopke, sa i bez kompenzacije nelinearnih
učinaka.
Mehatronika: pregled i primjeri39 / 46
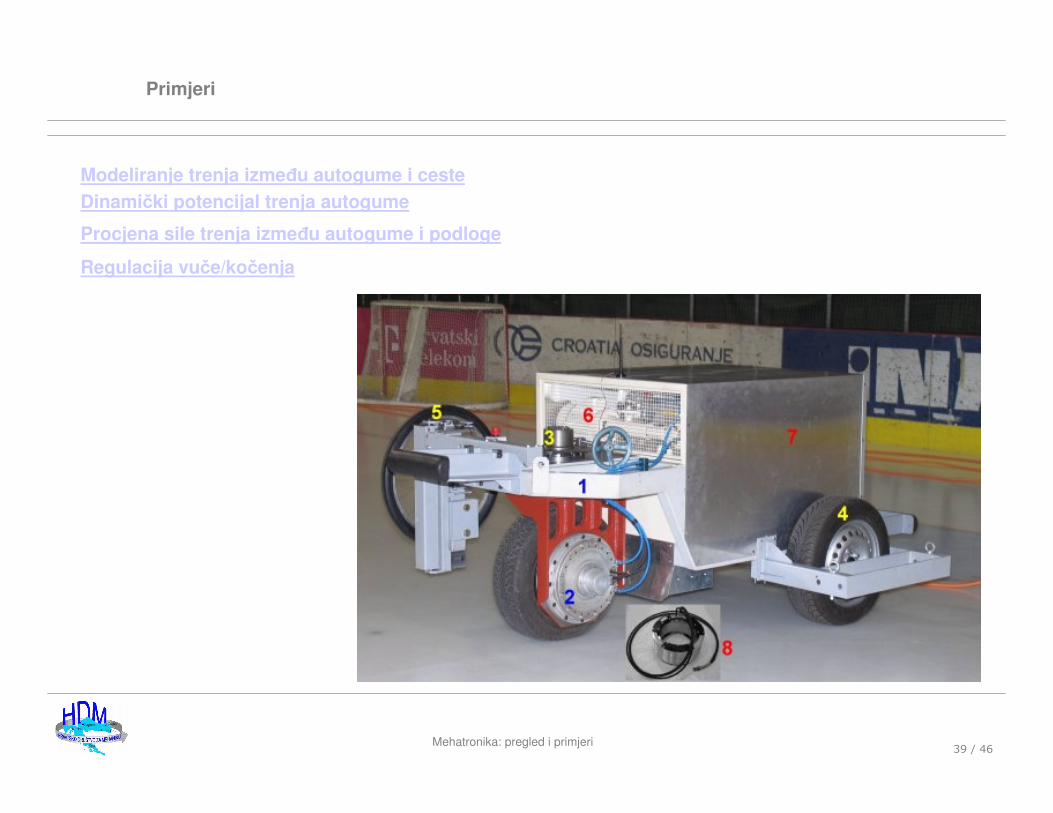
Primjeri
Modeliranje trenja između autogume i cesteDinamički potencijal trenja autogume
Procjena sile trenja između autogume i podloge
Regulacija vuče/kočenja
Mehatronika: pregled i primjeri40 / 46
Primjeri
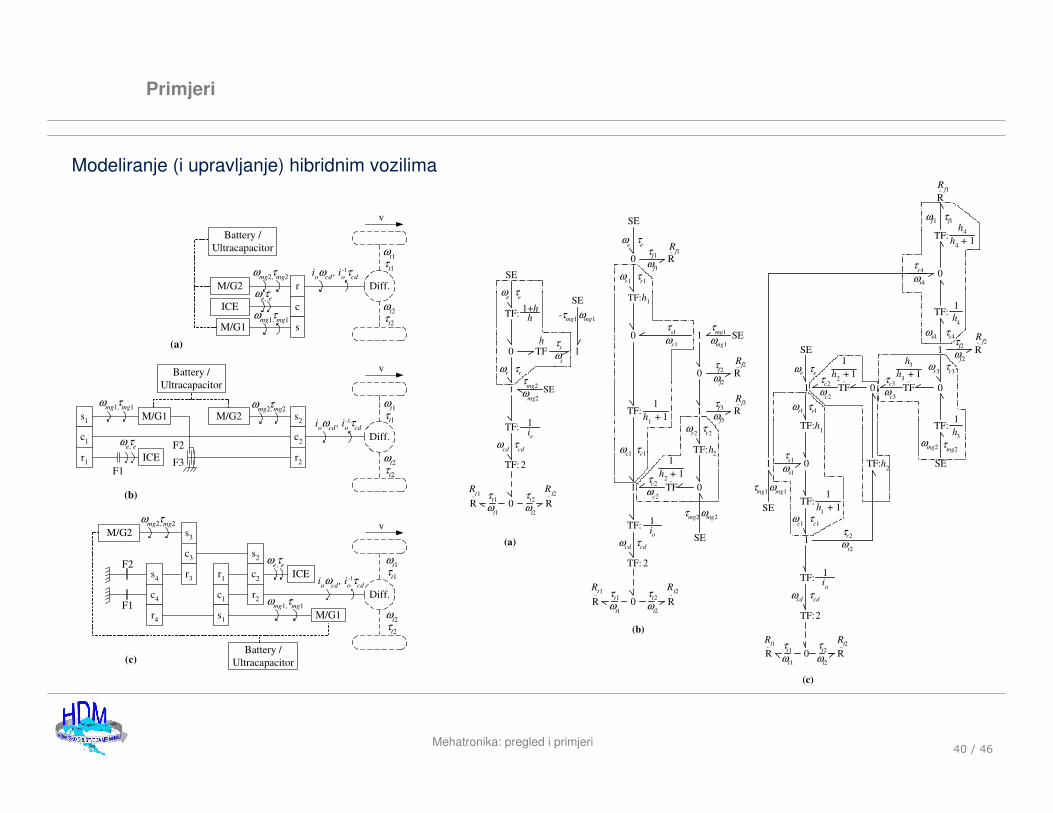
Modeliranje (i upravljanje) hibridnim vozilima
v
ωt1
τt1
ωt2
τt2
ωmg2,
τmg2
ωmg1,
τmg1
ωe,τ
e
Diff.r
c
sM/G1
ICE
M/G2
Battery /
Ultracapacitor
v
ωmg2,
τmg2
ωmg1,
τmg1
Diff.
s2
c2
r2
ICE
s1
c1
r1
F2
F3F1
ωe,τ
e
M/G1 M/G2
Battery /
Ultracapacitor
v
Diff.
F2
F1
s2
c2
r2
ICE
ωe,τ
e
r1
c1
s1
ωmg1,
τmg1
s3
c3
r3
s4
c4
r4
ωmg2,
τmg2
Battery /
Ultracapacitor
M/G1
M/G2
(a)
(b)
(c)
ωt1
τt1
ωt2
τt2
ωt1
τt1
ωt2
τt2
ioω
cd, i
o τ
cd-1
ioω
cd, i
o τ
cd-1
ioω
cd, i
o τ
cd-1
(a)
(b)
(c)
τmg1
..
R
Rt1
τr2
SE
ωe
τe
0
h2
ωs1
τs1
ωmg1
τmg1 SE
1
ωmg2
τmg2
SE
τc2
ωc2
TF..
..h
2 + 1
1
0
TF:
ωr2
1ωf3
..
R
τc1
ωc1
TF:h
1 + 1
1
ωf2
τf2
..
R
10
τr1
h1
TF:
ωr1
0ω
f1
τf1
..
R
Rf1
τf3
Rf2
Rf3
TF:io
1
ωcd
τcd
TF: 2
0 ωt2
τt2
..
R
Rt2
ωt1
τt1
TF: h1+h
SE
ωe
τe
0..
TFh
ωs
τs
1
ωmg1-τmg1
SE
ωr τr
1 ωmg2
τmg2
SE
TF:io
1
ωcd
τcd
TF: 2
0 ωt2
τt2
..
R
Rt2
ωt1
τt1
..
R
Rt1
h2
1
TF: io
1
ωcd
τcd
TF:2
0ωt2
τt2
..
R
Rt2
ωt1
τt1
..
R
Rt1
..
TF:
τc1
ωc1
TF:h
1 + 1
1
1
0
h1
0ωc2
τc2
TF:
SE
ωe τe
TF
h2 + 1
1
ωmg2 τ
mg2
SE
ωmg1
SE
ωr2
τr2
τr1
ωr1
..
0ωc3
τc3TF
h3 + 1
h3
h3
TF:1
τr3
ωr3
1 ωf2
τf2..
R
Rf2
TF:h
4
0
ωs4
τs4
1
TF:h
4 + 1
h4
..
R
Rf1
τf1ωf1
ωs1
τs11
ωr4
τr4
Mehatronika: pregled i primjeri41 / 46
Primjeri
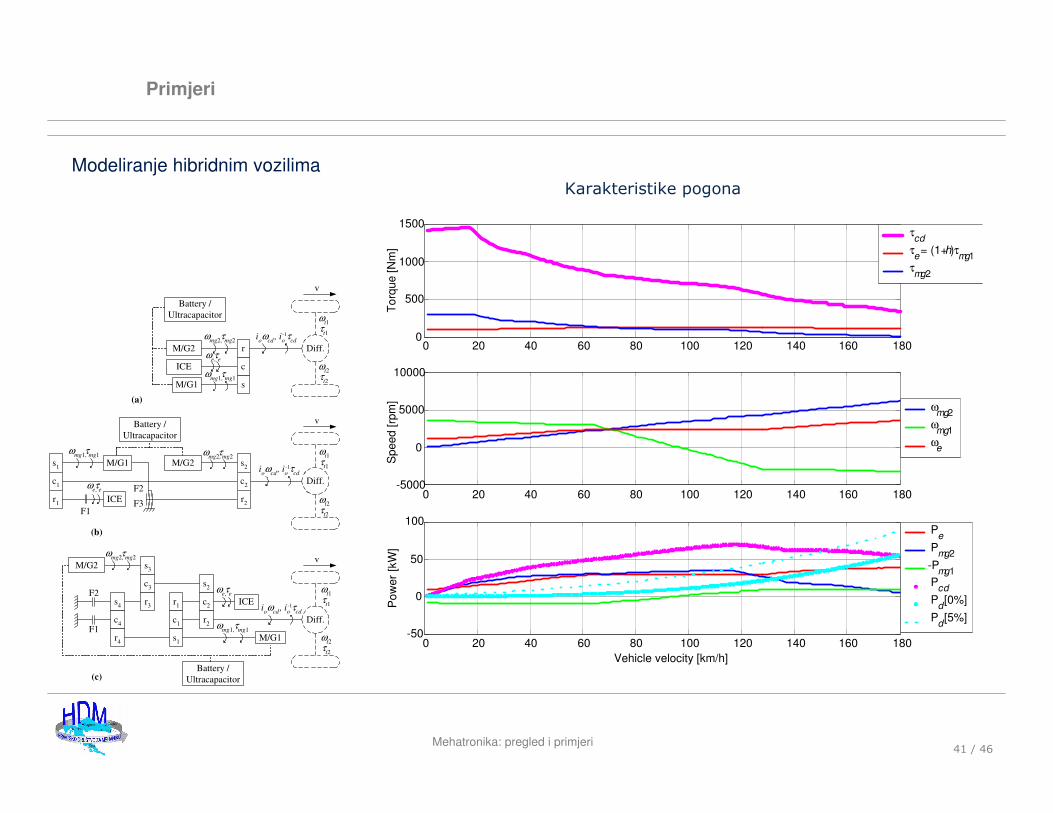
Modeliranje hibridnim vozilima
v
ωt1
τt1
ωt2
τt2
ωmg2,
τmg2
ωmg1,
τmg1
ωe,τ
e
Diff.r
c
sM/G1
ICE
M/G2
Battery /
Ultracapacitor
v
ωmg2,
τmg2
ωmg1,
τmg1
Diff.
s2
c2
r2
ICE
s1
c1
r1
F2
F3F1
ωe,τ
e
M/G1 M/G2
Battery /
Ultracapacitor
v
Diff.
F2
F1
s2
c2
r2
ICE
ωe,τ
e
r1
c1
s1
ωmg1,
τmg1
s3
c3
r3
s4
c4
r4
ωmg2,
τmg2
Battery /
Ultracapacitor
M/G1
M/G2
(a)
(b)
(c)
ωt1
τt1
ωt2
τt2
ωt1
τt1
ωt2
τt2
ioω
cd, i
o τ
cd-1
ioω
cd, i
o τ
cd-1
ioω
cd, i
o τ
cd-1
0 20 40 60 80 100 120 140 160 1800
500
1000
1500
Tor
que
[Nm
]
τcd
τe
= (1+h)τmg1
τmg2
0 20 40 60 80 100 120 140 160 180-5000
0
5000
10000
Spe
ed [r
pm]
ωmg2
ωmg1
ωe
0 20 40 60 80 100 120 140 160 180-50
0
50
100
Pow
er [
kW]
Vehicle velocity [km/h]
Pe
Pmg2
-Pmg1
Pcd
Pd[0%]
Pd[5%]
Karakteristike pogona
Mehatronika: pregled i primjeri42 / 46
Primjeri
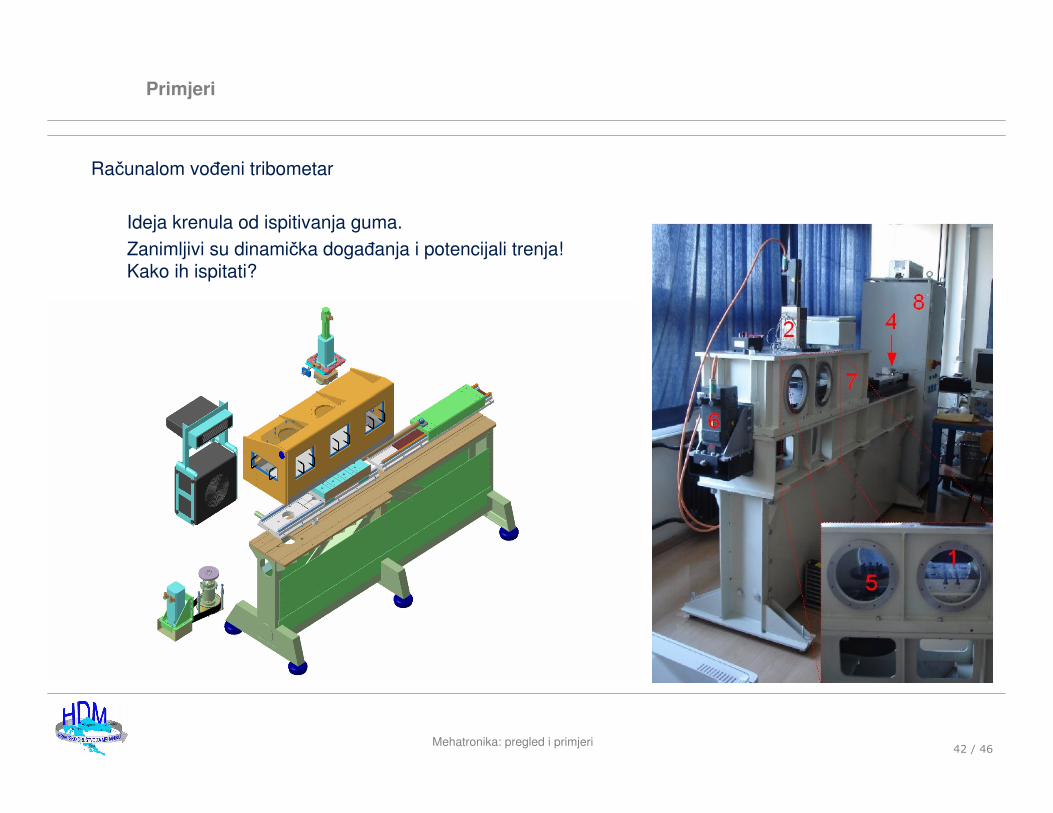
Računalom vođeni tribometar
Ideja krenula od ispitivanja guma.Zanimljivi su dinamička događanja i potencijali trenja! Kako ih ispitati?
Mehatronika: pregled i primjeri43 / 46
Zaključak
“Everything will, in some sense, be
smart; that is, every product, every
service, and every bit of infrastructure
will be attuned to the needs of the
humans it serves and will adapt its
behavior to those needs.”
Sensing, actuation, and control
USA National Academy of Engineering,
The Engineer of 2020
Mehatronika: pregled i primjeri44 / 46
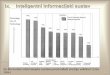
Zaključak
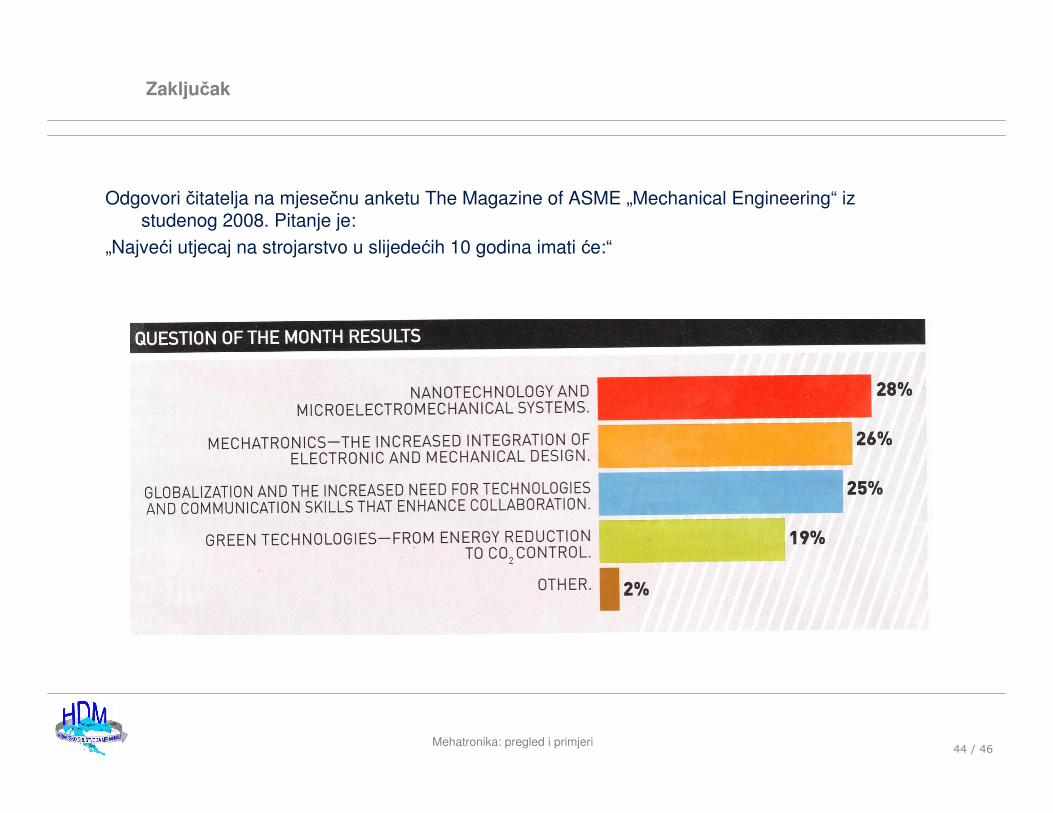
Odgovori čitatelja na mjesečnu anketu The Magazine of ASME „Mechanical Engineering“ iz studenog 2008. Pitanje je:
„Najveći utjecaj na strojarstvo u slijedećih 10 godina imati će:“