Embed Size (px)
Citation preview
http://www.physics.usyd.edu.au/~gfl/Lecture
Physics 1901 (Advanced)
A/Prof Geraint F. LewisRm 557, [email protected]/~gfl/Lecture
http://www.physics.usyd.edu.au/~gfl/Lecture
Rotational Motion
So far we have examined linear motion; Newton’s laws Energy conservation Momentum
Rotational motion seems quite different, but is actually familiar.
Remember: We are looking at rotation in fixed coordinates, not rotating coordinate systems.
http://www.physics.usyd.edu.au/~gfl/Lecture
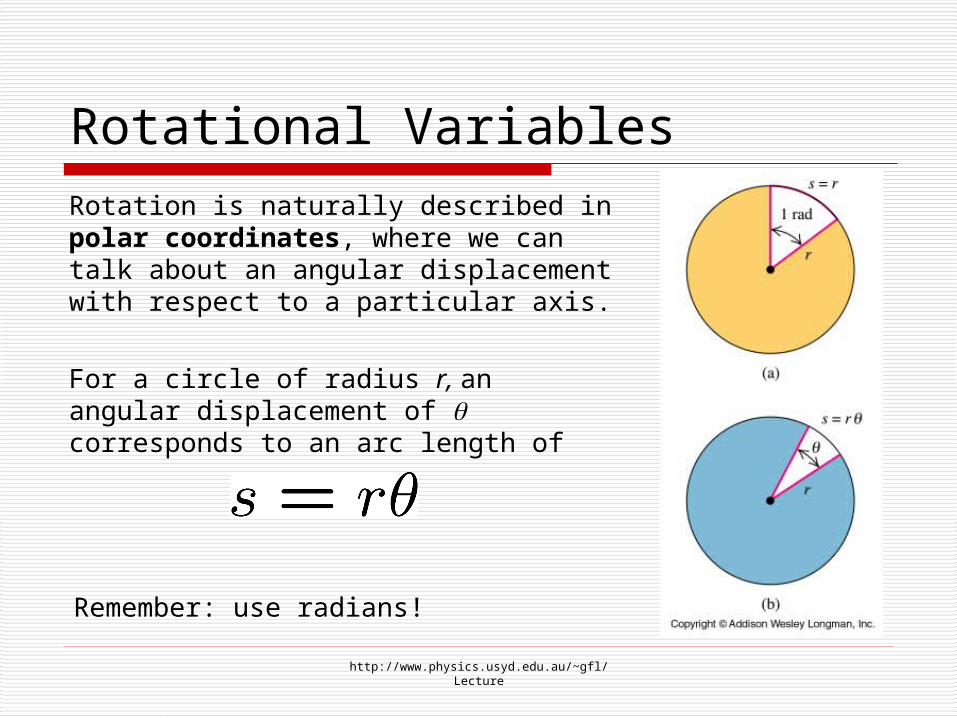
Rotational VariablesRotation is naturally described in polar coordinates, where we can talk about an angular displacement with respect to a particular axis.
For a circle of radius r, an angular displacement of corresponds to an arc length of
Remember: use radians!
http://www.physics.usyd.edu.au/~gfl/Lecture
Angular Variables
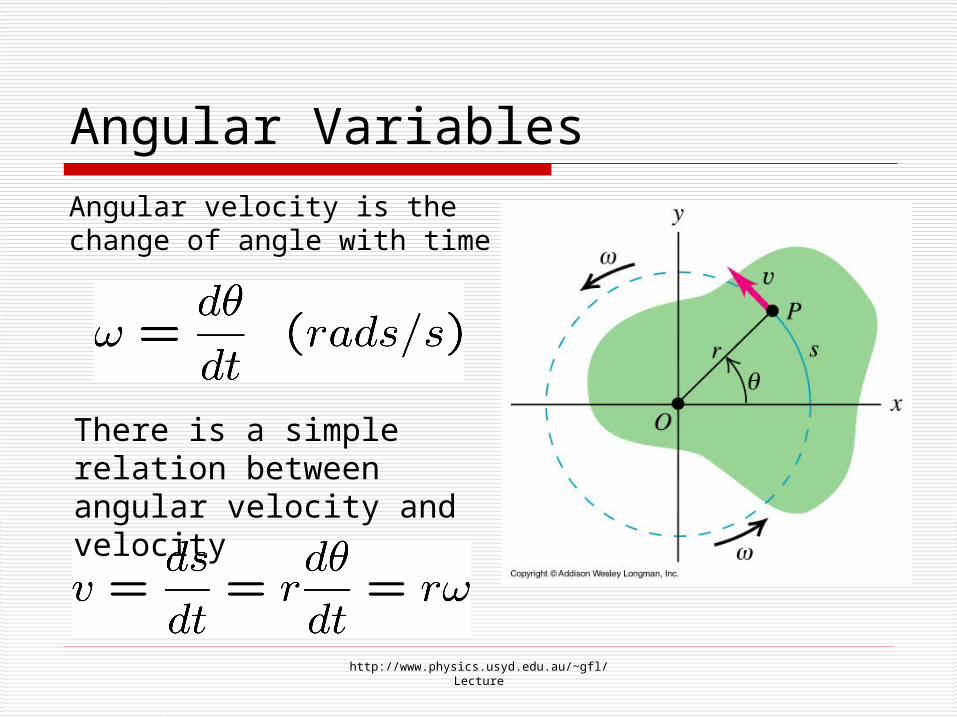
Angular velocity is the change of angle with time
There is a simple relation between angular velocity and velocity
http://www.physics.usyd.edu.au/~gfl/Lecture
Angular Variables
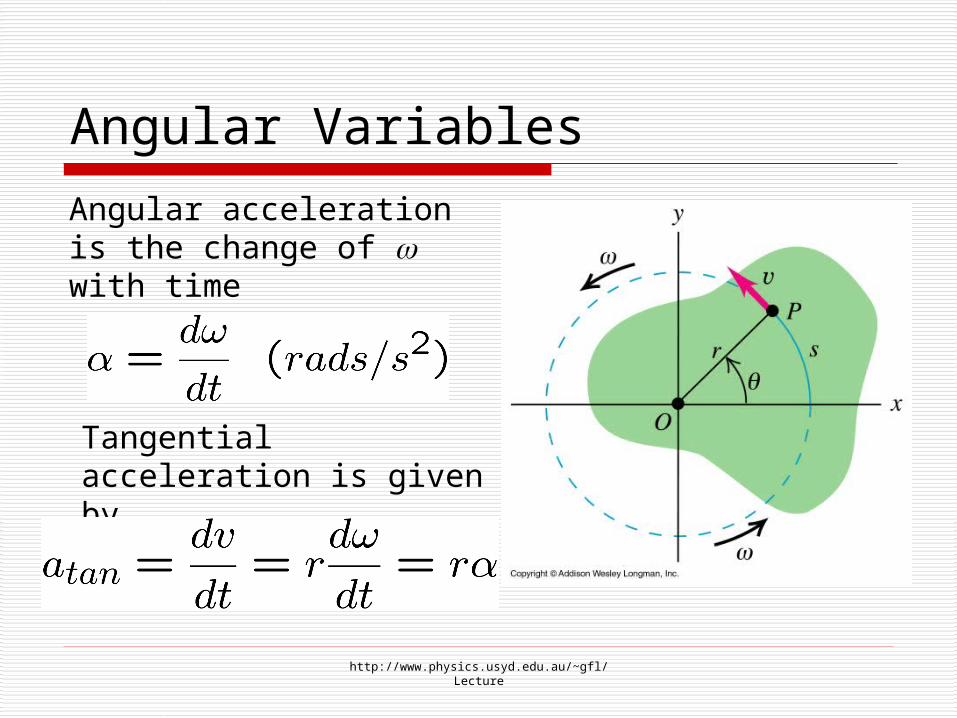
Angular acceleration is the change of with time
Tangential acceleration is given by
http://www.physics.usyd.edu.au/~gfl/Lecture
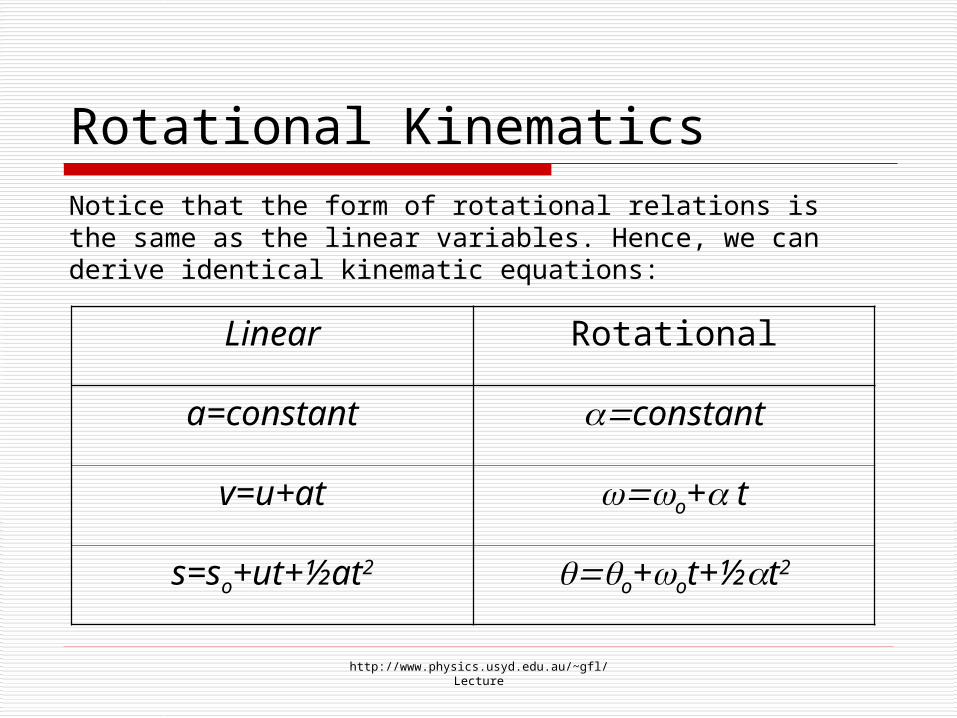
Rotational KinematicsNotice that the form of rotational relations is the same as the linear variables. Hence, we can derive identical kinematic equations:
Linear Rotational
a=constant constant
v=u+at o+ t
s=so+ut+½at2 o+ot+½t2
http://www.physics.usyd.edu.au/~gfl/Lecture
Net Acceleration
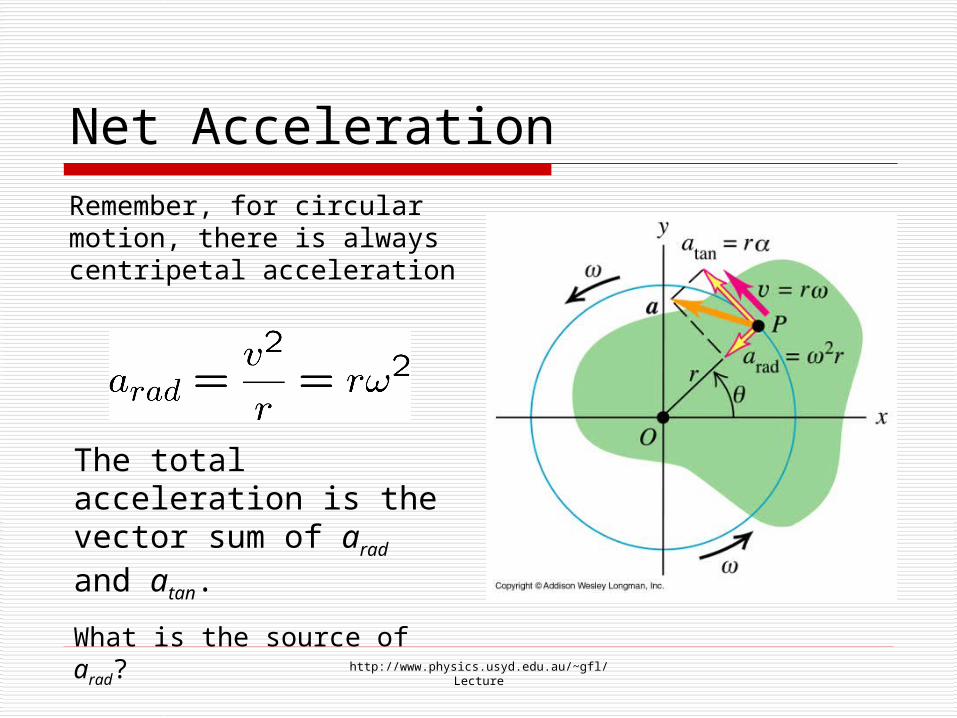
Remember, for circular motion, there is always centripetal acceleration
The total acceleration is the vector sum of arad and atan.
What is the source of arad?
http://www.physics.usyd.edu.au/~gfl/Lecture
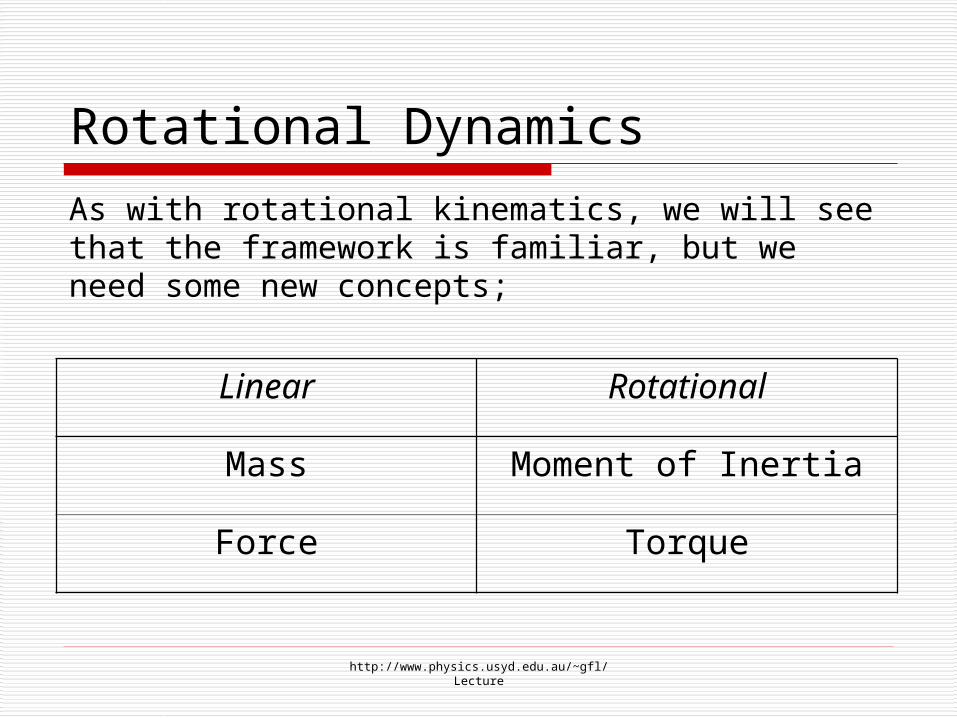
Rotational Dynamics
As with rotational kinematics, we will see that the framework is familiar, but we need some new concepts;
Linear Rotational
Mass Moment of Inertia
Force Torque

http://www.physics.usyd.edu.au/~gfl/Lecture
Moment of Inertia
This quantity depends upon the distribution of the mass and the location of the axis of rotation.
http://www.physics.usyd.edu.au/~gfl/Lecture
Moment of Inertia
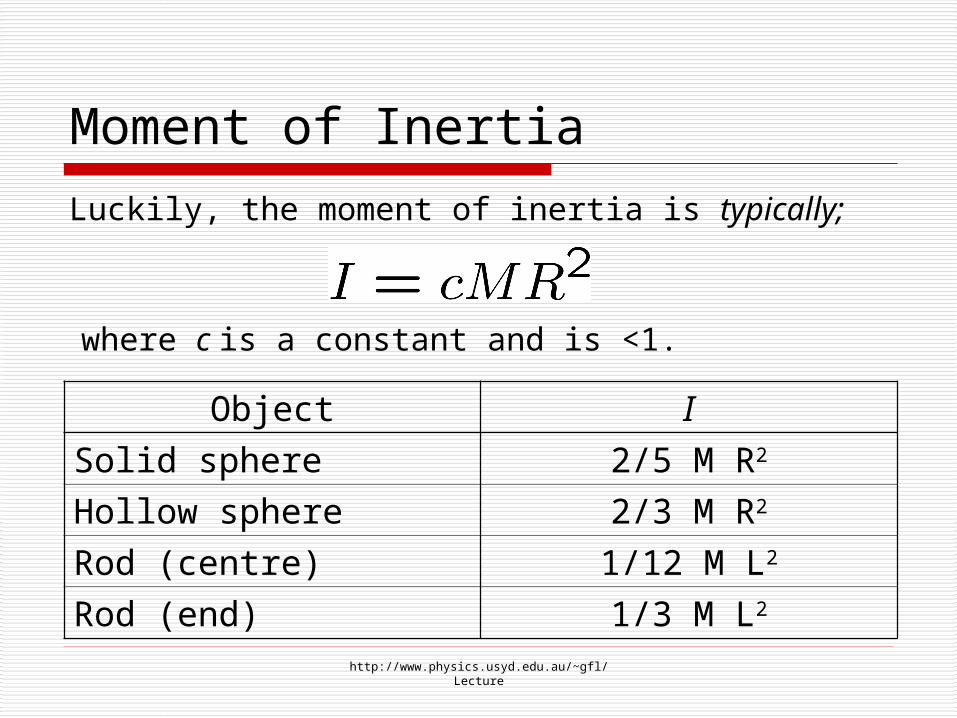
Luckily, the moment of inertia is typically;
where c is a constant and is <1.
Object I
Solid sphere 2/5 M R2
Hollow sphere 2/3 M R2
Rod (centre) 1/12 M L2
Rod (end) 1/3 M L2
http://www.physics.usyd.edu.au/~gfl/Lecture
Energy in Rotation
To get something moving, you do work on it, the result being kinetic energy.
To get objects spinning also takes work, but what is the rotational equivalent of kinetic energy?
Problem: in a rotating object, each bit of mass has the same angular speed , but different linear speed v.
http://www.physics.usyd.edu.au/~gfl/Lecture
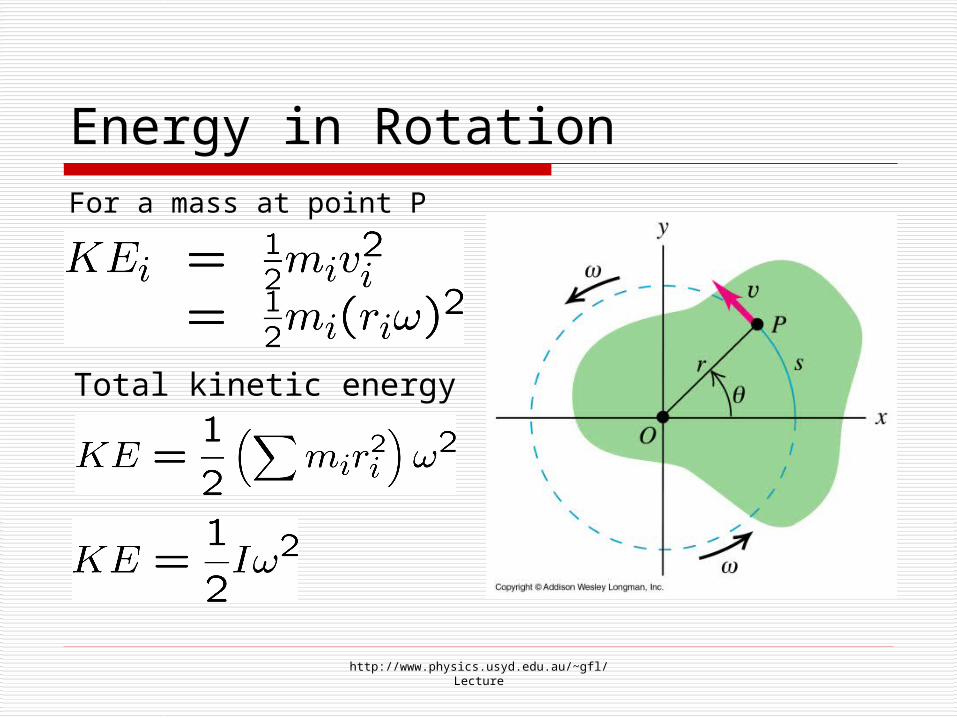
Energy in RotationFor a mass at point P
Total kinetic energy
http://www.physics.usyd.edu.au/~gfl/Lecture
Parallel Axis Theorem
The moment of inertia depends upon the mass distribution of an object and the axis of rotation.
For an object, there are an infinite number of moments of inertia!
Surely you don’t have to do an infinite number of integrations when dealing with objects?

http://www.physics.usyd.edu.au/~gfl/Lecture
Parallel Axis Theorem
If we know the moment of inertia through the centre of mass, the moment of inertia along a parallel axis d is;
The axis does not have to be through the body!
http://www.physics.usyd.edu.au/~gfl/Lecture
Torque
Opening a door requires not only an application of a force, but also how the force is applied;
It is ‘easier’ pushing a door further away from the hinge.
Pulling or pushing away from the hinge does not work!
From this we get the concept of torque.
http://www.physics.usyd.edu.au/~gfl/Lecture
Torque
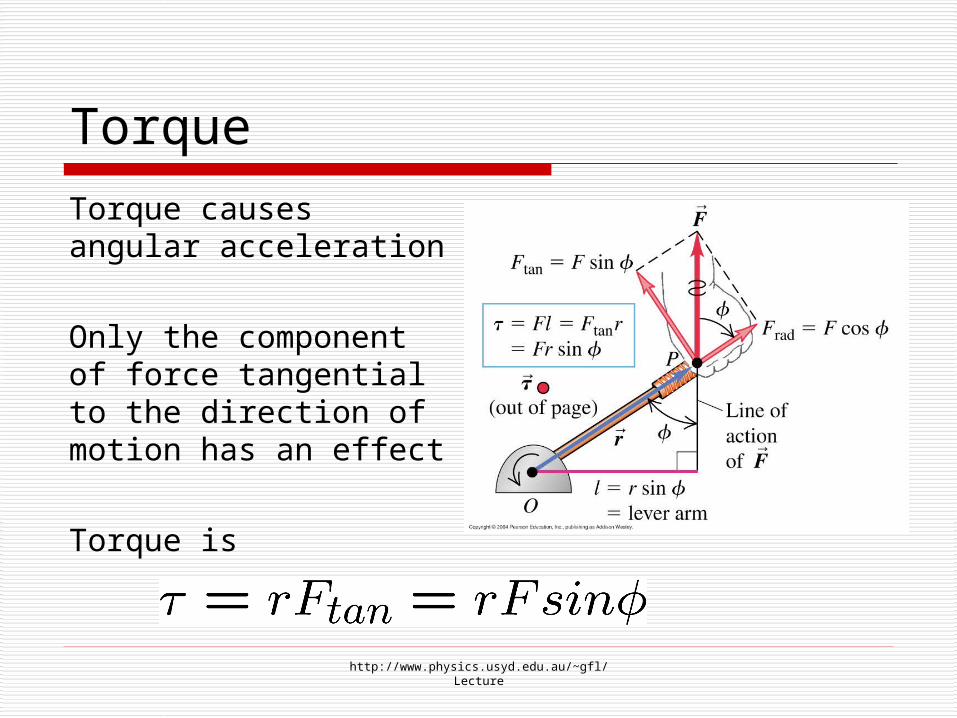
Torque causes angular acceleration
Only the component of force tangential to the direction of motion has an effect
Torque is
http://www.physics.usyd.edu.au/~gfl/Lecture
Torque
Like force, torque is a vector quantity (in fact, the other angular quantities are also vectors). The formal definition of torque is
where the £ is the vector cross product.
In which direction does this vector point?
http://www.physics.usyd.edu.au/~gfl/Lecture
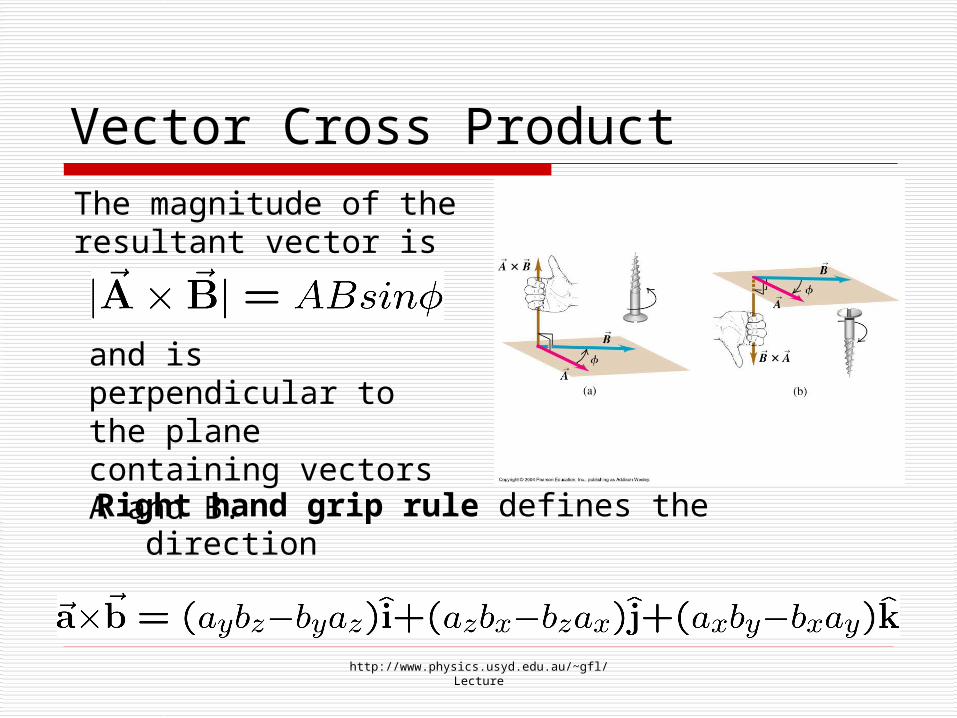
Vector Cross ProductThe magnitude of the resultant vector is
and is perpendicular to the plane containing vectors A and B.
Right hand grip rule defines the direction
http://www.physics.usyd.edu.au/~gfl/Lecture
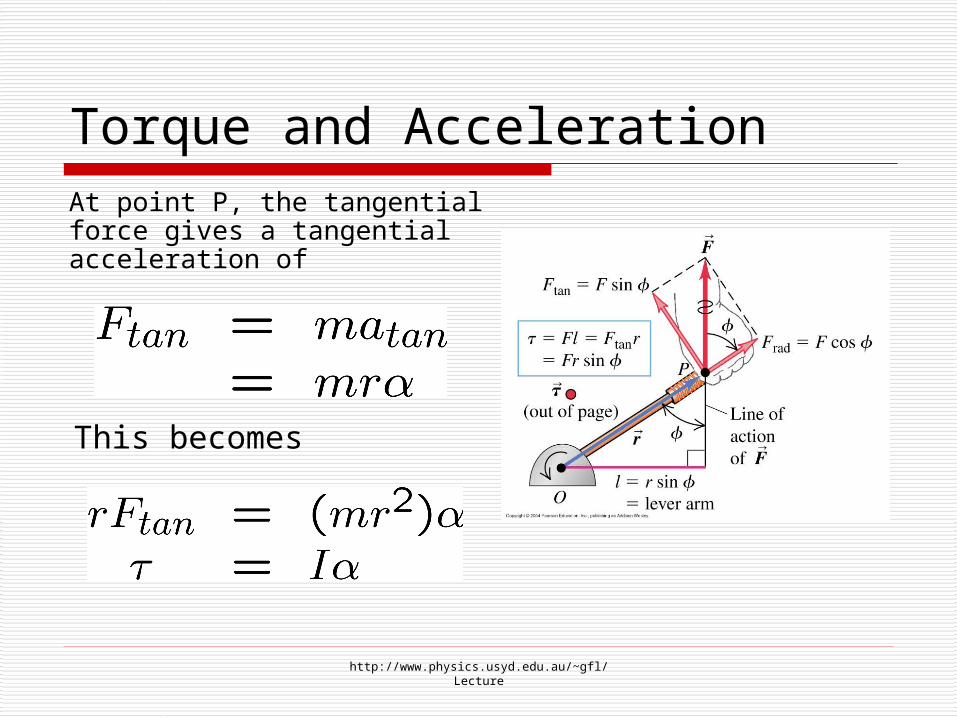
Torque and AccelerationAt point P, the tangential force gives a tangential acceleration of
This becomes
http://www.physics.usyd.edu.au/~gfl/Lecture
Torque and Acceleration
For an arbitrarily shaped object
We have the rotational equivalent of Newton’s second law!
Torque produces an angular acceleration.
Notice the vector quantities. All rotational variables point along the axis of rotation.
(Read torques & equilibrium 11.0-11.3 in textbook)





























