Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DO CEARÁ CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA ESTRUTURAL E CONSTRUÇÃO CIVIL
HUGO PANTOJA HAGMANN BENTES
CÁLCULO DE DEFORMAÇÕES ATRAVÉS DO MÉTODO DE CORRELAÇÃO DE IMAGENS
FORTALEZA
2010
ii
HUGO PANTOJA HAGMANN BENTES
CÁLCULO DE DEFORMAÇÕES ATRAVÉS DO MÉTODO DE CORRELAÇÃO DE IMAGENS
Monografia submetida à Coordenação do curso de Engenharia Civil da Universidade Federal do Ceará, como requisito parcial para obtenção do grau de Engenheiro Civil. Orientadora: Prof. D. Sc Tereza Denyse P. Araújo
FORTALEZA 2010

B419c Bentes, Hugo Pantoja Hagmann Cálculo de deformações através do método de correlação de imagens / Hugo Pantoja Hagmann Bentes. – Fortaleza, 2010.
63 f. il.; color. enc.
Orientadora: Profa. Dra. Tereza Denyse Pereira de Araújo Monografia (graduação) - Universidade Federal do Ceará, Centro de Tecnologia. Depto. de Engenharia Estrutural e Construção Civil, Fortaleza, 2010.
1. Edifícios-especificações 2. Construção-correlação de imagens I. Araújo, Tereza Denyse Pereira de Araújo (orient.) II. Universidade Federal do Ceará – Graduação em Engenharia Civil. III. Título
CDD 620

iv
RESUMO
Na engenharia é de extrema importância o conhecimento do comportamento dos materiais quando submetidos a situações de uso. Um parâmetro de difícil obtenção, devido a sua pequena magnitude, é a deformação. O objetivo do presente trabalho será o cálculo e análise de deformações através do método de correlação de imagens. O método consiste na determinação do campo de deslocamentos realizando-se uma comparação entre duas imagens fotográficas obtidas em instantes diferentes de um ensaio. A obtenção dos deslocamentos é feita através do nível de cinza de diversos pontos de uma imagem e a deformação é obtida através de diferenciação discreta. Neste caso, será analisado um corpo de prova de concreto submetido à compressão axial e uma viga de concreto armado submetida à flexão. Através dos resultados obtidos, determinar-se-ão os parâmetros elásticos do material de forma pontual e identificar-se-ão regiões de fissuração que podem ocasionar a ruína do mesmo.
Palavras-chaves: Deslocamentos, Deformações, Pixel.
v
AGRADECIMENTOS
A DEUS pela vida e por tudo de bom que me propiciou e por ter me ajudado a
conquistar meus objetivos
Aos meus pais e meu irmão que mesmo estando distantes fisicamente, me deram amor
e apoio para encarar os desafios da vida.
Ao Reynaldo e Amanda que foram os meus irmãos durante esta estada em Fortaleza.
Ao tio Miguel e tia Zilma que me forneceram a oportunidade de morar e estudar no
Ceará
A todos os meus amigos do Acre que me propiciaram momentos de felicidades
durante as minhas férias.
Ao professor Hiluy que me deu a oportunidade de estudar na França e me apoiou
durante todo aquele período.
A todos os amigos que fiz durante a minha morada na França que tornaram aquele
período inesquecível.
A todos os amigos que fiz no Ceará, especialmente, Márcio, Isael, Cristóvao e William
que foram os maiores parceiros durante estes 5 anos.
A todos os amigos do meu prédio que foram as pessoas que me receberam de braços
abertos.
Ao professor Georg Koval que me auxiliou na disciplina de PRT no INSA de
Strasbourg e foi um grande colaborador para a realização deste trabalho.
Ao professores Joaquim e Magnólia pelo aprendizado fornecido nas aulas e no estágio.
Ao Ricardo e Marcelo pelo apoio durante o meu estágio na TUTTI Engenharia.
A todas as pessoas do CTE Strasbourg que me orientaram e me receberam de braços
abertos no período em que trabalhei lá.
À professora Tereza Denyse por ter me orientado durante esta monografia.
Ao Geovani por ter manipulado os equipamentos do laboratório de materiais da UFC e
ao Everton por ter cedido, gentilmente, a câmera fotográfica para a obtenção das fotos.
Aos professores que de forma direta ou indireta contribuíram para minha formação
pessoal e profissional.
A todos que contribuíram diretamente ou indiretamente para este trabalho.
Ao Ceará que me recebeu de braços abertos e fez este período inesquecível.

vi
SUMÁRIO
1 INTRODUÇÃO ................................................................................................................ 1
1.1 MOTIVAÇÃO .................................................................................................................... 1 1.2 OBJETIVOS ....................................................................................................................... 2
1.2.1 Objetivo geral ......................................................................................................... 2 1.3 OBJETIVO ESPECÍFICOS .................................................................................................... 2 1.4 ORGANIZAÇÃO DO TEXTO ................................................................................................ 2
2 FUNDAMENTAÇÃO TEÓRICA ................................................................................... 3
2.1 DEFORMAÇÃO ................................................................................................................. 3 2.2 DEFORMAÇÕES PRINCIPAIS E CÍRCULO DE MOHR. ........................................................... 6 2.3 TEORIAS DE FALHA .......................................................................................................... 8 2.4 COEFICIENTE DE POISSON ................................................................................................ 9 2.5 CONCRETO ..................................................................................................................... 10 2.6 VELOCÍMETRO POR CORRELAÇÃO DE IMAGENS (CIV) .................................................. 11
2.6.1 Escala de cinza ..................................................................................................... 11 2.6.2 ZOI – Zona de interesse ....................................................................................... 12 2.6.3 Parâmetros de Entrada ........................................................................................ 16
3 METODOLOGIA ........................................................................................................... 17
4 ENSAIOS ......................................................................................................................... 18
4.1 COMPRESSÃO AXIAL ...................................................................................................... 18 4.1.1 Compressão axial: fase elástica ........................................................................... 21 4.1.2 Compressão axial: fase plástica ........................................................................... 26 4.1.3 Compressão axial: Ruptura .................................................................................. 30
4.2 FLEXÃO PURA ................................................................................................................ 34
5 CONCLUSÃO ................................................................................................................. 39
REFERÊNCIAS BIBLIOGRÁFICAS ................................................................................. 41
APÊNDICE A – CONVERSOR DE IMAGENS EM ESCALA DE CINZA .................... 42
APÊNDICE B – CÁLCULO DE DEFORMAÇÕES PRINCIPAIS NO MATLAB ......... 43
APÊNDICE C – CÁLCULO DE DEFORMAÇÕES E DESLOCAMENTOS NO MATLAB ................................................................................................................................. 49
vii
LISTA DE FIGURAS
Figura 2.1- Deformação normal média....................................................................................... 3 Figura 2.2 – Deformação Cisalhante .......................................................................................... 4 Figura 2.3 – Estado geral de tensões .......................................................................................... 4 Figura 2.4 – Deformação Cisalhante .......................................................................................... 5 Figura 2.5 – Estado plano de deformações ................................................................................. 7 Figura 2.6 – Círculo de Mohr ..................................................................................................... 7 Figura 2.7 – Envoltória de Rankine ............................................................................................ 8 Figura 2.8 – Envoltória de Mohr ................................................................................................ 9 Figura 2.9 – Escala de Cinza .................................................................................................... 11 Figura 2.10 – Imagem original ................................................................................................. 12 Figura 2.11 – Imagem codificada ............................................................................................. 12 Figura 2.12 – ZOI (Zone of interest) ........................................................................................ 13 Figura 2.13 – ZOI em uma imagem ......................................................................................... 13 Figura 2.14 – Comparação de ZOI da imagem original com a transformada. ......................... 14 Figura 2.15 – Cálculo do subpixel. ........................................................................................... 15 Figura 2.16 – Parâmetros do cálculo de deslocamentos ........................................................... 16 Figura 3.1 – Cálculo das deformações ..................................................................................... 17 Figura 4.1 – Corpo-de-prova e eixos coordenadas adotados .................................................... 18 Figura 4.2 – Imagem de referência ........................................................................................... 19 Figura 4.3 – Imagem transformada com compressão de 1% .................................................... 19 Figura 4.4 – Imagem transformada com compressão de 1% .................................................... 20 Figura 4.5 – Deslocamento horizontal ...................................................................................... 20 Figura 4.6 – Deslocamento vertical .......................................................................................... 21 Figura 4.7 – Região de análise do corpo-de-prova. .................................................................. 22 Figura 4.8 – Deslocamento horizontal ...................................................................................... 23 Figura 4.9 – Deformação horizontal ......................................................................................... 23 Figura 4.10 – Deformação principal 1 ...................................................................................... 24 Figura 4.11 – Deslocamento vertical ........................................................................................ 24 Figura 4.12 – Deformação vertical ........................................................................................... 25 Figura 4.13 – Deformação principal 2 ...................................................................................... 25 Figura 4.14 – Coeficiente de Poisson ....................................................................................... 26 Figura 4.15 – Região de análise – fase plástica ........................................................................ 27 Figura 4.16 – Deslocamento horizontal .................................................................................... 28 Figura 4.17 – Deformação Horizontal ...................................................................................... 28 Figura 4.18 – Deformação Principal 1...................................................................................... 29 Figura 4.19 – Deslocamento vertical ........................................................................................ 29 Figura 4.20 – Deformação vertical ........................................................................................... 30 Figura 4.21 – Deformação principal 2 ...................................................................................... 30 Figura 4.22 – Região de análise – Ruptura ............................................................................... 31 Figura 4.23 – Fissuras 1 e 2 ...................................................................................................... 31 Figura 4.24 – Fissura 1 ............................................................................................................. 32 Figura 4.25 – Fissura 2 ............................................................................................................. 32 Figura 4.26 – Deformação horizontal com as fissuras 1 e 2 ..................................................... 33 Figura 4.27 – Ruptura ............................................................................................................... 33 Figura 4.28 – Deformação vertical ........................................................................................... 34 Figura 4.29 – Modelisação da viga ........................................................................................... 34 Figura 4.30 – Diagrama de momento fletor ............................................................................. 35 Figura 4.31 – Região de análise e ruptura ................................................................................ 35
viii
Figura 4.32 – Deformação horizontal com 1 tonelada ............................................................. 36 Figura 4.33 – Deformação horizontal com 2 toneladas. ........................................................... 37 Figura 4.34 – Deformação horizontal com 5 toneladas. ........................................................... 38

ix
LISTA DE TABELAS
Tabela 2.1 – Funções de forma ................................................................................................. 15 Tabela 4.1 – Relação foto/carregamento .................................................................................. 36
1
1 INTRODUÇÃO
1.1 Motivação
Em várias aplicações no âmbito da fotogrametria digital, faz-se necessária a
localização do ponto semelhante em uma ou mais imagens através da superposição de
imagens. Nesta base consiste a medição de deslocamentos através de imagens.
O desenvolvimento de técnicas confiáveis de medição dos campos de
deslocamentos é primordial quando se deseja caracterizar os comportamentos mecânicos de
estruturas usadas na Engenharia Civil. (HILD, 2003, p. 01)
Desde a década de 80, graças ao progresso tecnológico e ao desenvolvimento das
máquinas fotográficas, o método de correlação de imagens pôde se desenvolver. Atualmente,
a técnica mais utilizada e mais precisa consiste em calcular os deslocamentos através de
algoritmos de correlação de imagens (AREELIS, 2003, p. 01)
O uso de tratamento de imagens para medição de deslocamentos já é bem
difundido no ramo de mecânica dos fluidos, mas pode ser igualmente adaptada à mecânica
dos sólidos (HILD, 2003, p. 01). Os deslocamentos são obtidos através de uma comparação
entre fotos obtidas em momentos diferentes de um ensaio.
Método de Correlação de Imagens pode ser aplicado em ensaios de laboratórios
visando à caracterização de materiais de engenharia civil (ensaio de compressão axial, ensaio
de tração, ensaio de fissuração, ensaio de flexão, etc). Este método não destrutivo e sem
contato permite determinar deslocamentos em tempo real na estrutura em análise de forma
rápida, precisa e pouco onerosa exigindo somente uma câmera fotográfica e um computador.
2
1.2 Objetivos
1.2.1 Objetivo geral
O objetivo geral deste trabalho é verificar a eficiência do método de correlação de
imagens para o cálculo de deformações do concreto quando submetido a ensaios mecânicos.
1.3 Objetivos específicos
Este trabalho limita-se na análise experimental de corpo de prova de concreto
simples e de viga de concreto armado quando submetidos ao ensaio de compressão axial e
flexão simples, respectivamente. Esta análise é feita através da determinação do campo de
deslocamento através da correlação de duas imagens em estágios diferentes do ensaio. Para o
concreto simples submetido à compressão, identifica-se as regiões de fissuras e será calculado
o coeficiente de Poisson do material através da relação entre deformações horizontais e
verticais. No caso da viga submetida à flexão, os valores de deformação vertical são
calculados pelo algoritmo e são comparados com os valores obtidos através da NBR 6118
(ABNT,2003).
1.4 Organização do texto
O presente relatório está estruturado em 5 capítulos sendo que no primeiro
encontra-se uma breve descrição das atividades executadas e motivações para este trabalho;
no segundo consta a revisão bibliográfica necessária para o estudo e análise dos resultados.
No terceiro capítulo, há uma descrição dos ensaios executados, bem como as limitações dos
métodos. No quarto capítulo consta uma breve descrição dos ensaios, apresentação e
discussões dos resultados. No quinto capítulo consta a conclusão comentando os resultados
obtidos, limitações e sugestões para estudos futuros.
3
2 FUNDAMENTAÇÃO TEÓRICA
2.1 Deformação
Deformação é a mudança na forma e tamanho de um corpo quando uma força é
aplicada no mesmo (HIBBELER, 2000). No caso dos materiais utilizados na engenharia civil,
essas deformações dificilmente são perceptíveis a olho nu. No estado geral de
tensão/deformação, um elemento pode estar submetido a deformações normais ou de
cisalhamento.
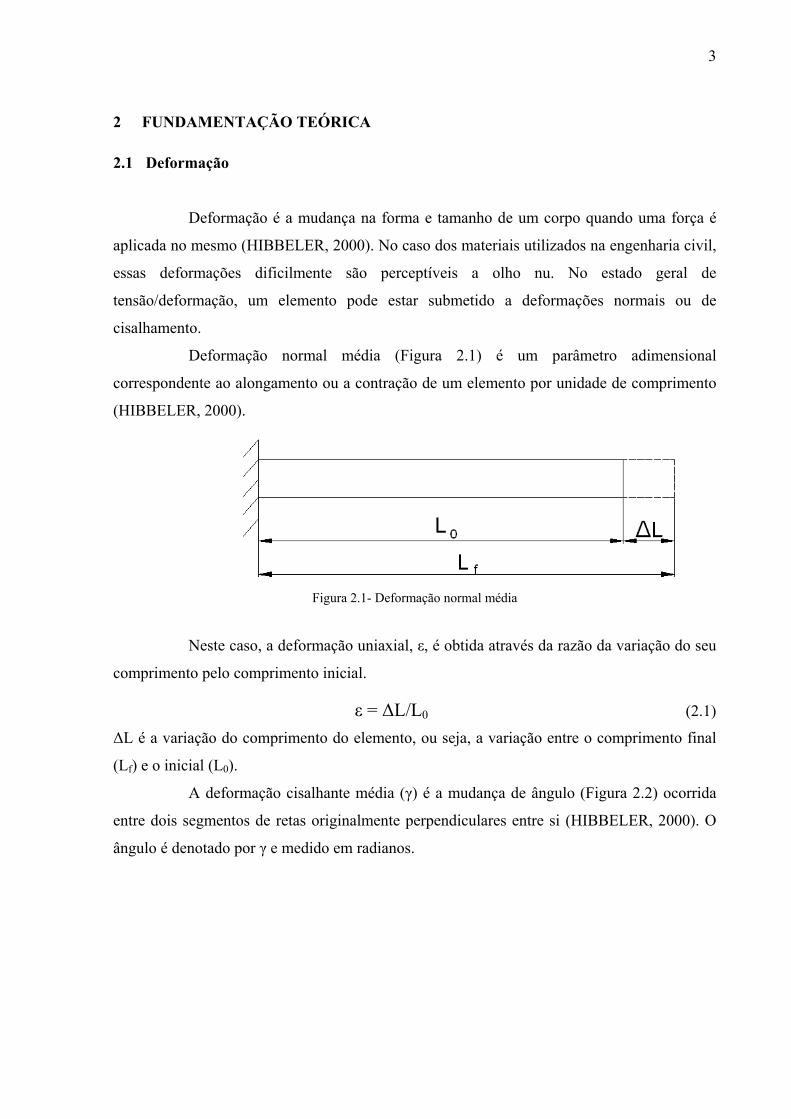
Deformação normal média (Figura 2.1) é um parâmetro adimensional
correspondente ao alongamento ou a contração de um elemento por unidade de comprimento
(HIBBELER, 2000).
Figura 2.1- Deformação normal média
Neste caso, a deformação uniaxial, ε, é obtida através da razão da variação do seu
comprimento pelo comprimento inicial.
ε = ΔL/L0 (2.1)
ΔL é a variação do comprimento do elemento, ou seja, a variação entre o comprimento final
(Lf) e o inicial (L0).
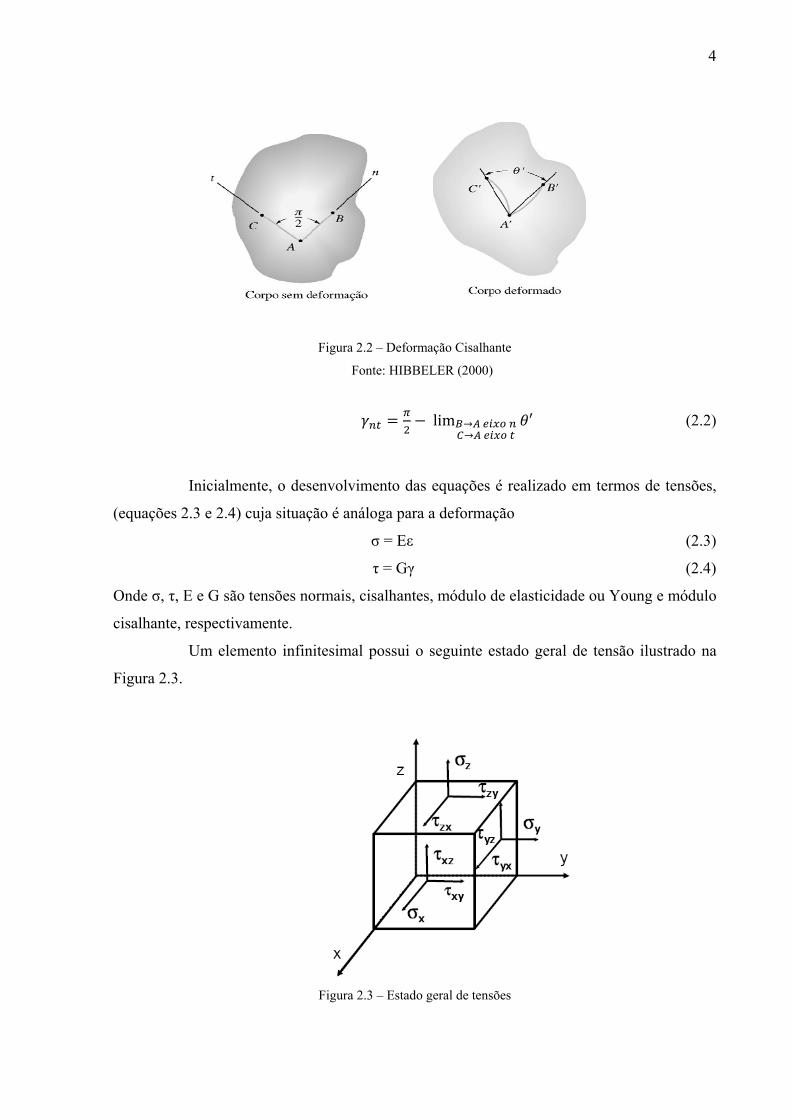
A deformação cisalhante média (γ) é a mudança de ângulo (Figura 2.2) ocorrida
entre dois segmentos de retas originalmente perpendiculares entre si (HIBBELER, 2000). O
ângulo é denotado por γ e medido em radianos.
4
Figura 2.2 – Deformação Cisalhante
Fonte: HIBBELER (2000)
lim
(2.2)
Inicialmente, o desenvolvimento das equações é realizado em termos de tensões,
(equações 2.3 e 2.4) cuja situação é análoga para a deformação
σ = Eε (2.3)
τ = Gγ (2.4)
Onde σ, τ, E e G são tensões normais, cisalhantes, módulo de elasticidade ou Young e módulo
cisalhante, respectivamente.
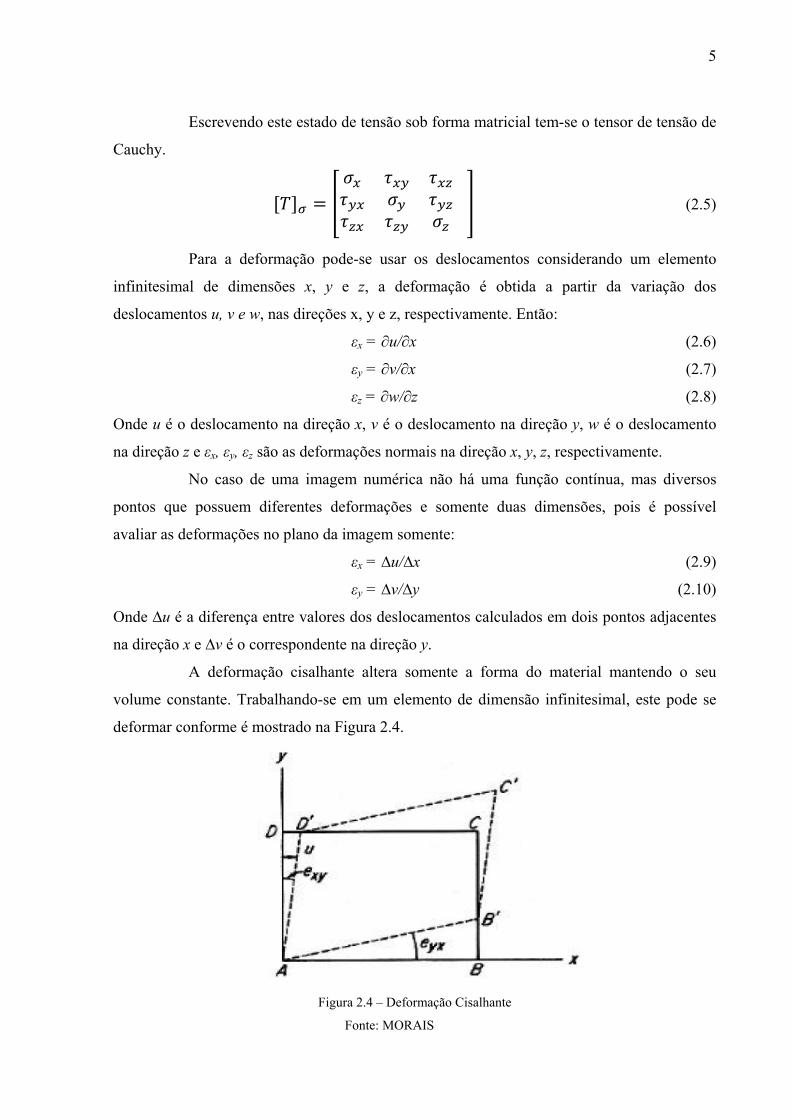
Um elemento infinitesimal possui o seguinte estado geral de tensão ilustrado na
Figura 2.3.
Figura 2.3 – Estado geral de tensões
5
Escrevendo este estado de tensão sob forma matricial tem-se o tensor de tensão de
Cauchy.
(2.5)
Para a deformação pode-se usar os deslocamentos considerando um elemento
infinitesimal de dimensões x, y e z, a deformação é obtida a partir da variação dos
deslocamentos u, v e w, nas direções x, y e z, respectivamente. Então:
εx = ∂u/∂x (2.6)
εy = ∂v/∂x (2.7)
εz = ∂w/∂z (2.8)
Onde u é o deslocamento na direção x, v é o deslocamento na direção y, w é o deslocamento
na direção z e εx, εy, εz são as deformações normais na direção x, y, z, respectivamente.
No caso de uma imagem numérica não há uma função contínua, mas diversos
pontos que possuem diferentes deformações e somente duas dimensões, pois é possível
avaliar as deformações no plano da imagem somente:
εx = ∆u/∆x (2.9)
εy = ∆v/∆y (2.10)
Onde ∆u é a diferença entre valores dos deslocamentos calculados em dois pontos adjacentes
na direção x e ∆v é o correspondente na direção y.
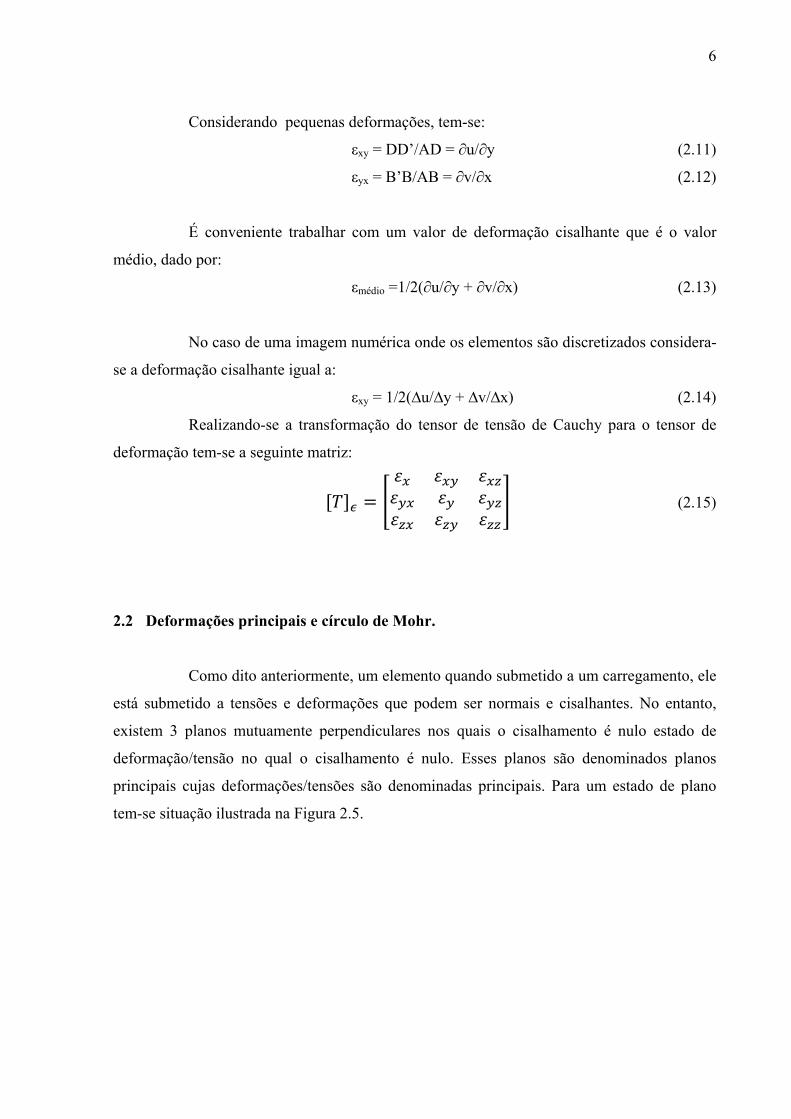
A deformação cisalhante altera somente a forma do material mantendo o seu
volume constante. Trabalhando-se em um elemento de dimensão infinitesimal, este pode se
deformar conforme é mostrado na Figura 2.4.
Figura 2.4 – Deformação Cisalhante
Fonte: MORAIS
6
Considerando pequenas deformações, tem-se:
εxy = DD’/AD = ∂u/∂y (2.11)
εyx = B’B/AB = ∂v/∂x (2.12)
É conveniente trabalhar com um valor de deformação cisalhante que é o valor
médio, dado por:
εmédio =1/2(∂u/∂y + ∂v/∂x) (2.13)
No caso de uma imagem numérica onde os elementos são discretizados considera-
se a deformação cisalhante igual a:
εxy = 1/2(∆u/∆y + ∆v/∆x) (2.14)
Realizando-se a transformação do tensor de tensão de Cauchy para o tensor de
deformação tem-se a seguinte matriz:
(2.15)
2.2 Deformações principais e círculo de Mohr.
Como dito anteriormente, um elemento quando submetido a um carregamento, ele
está submetido a tensões e deformações que podem ser normais e cisalhantes. No entanto,
existem 3 planos mutuamente perpendiculares nos quais o cisalhamento é nulo estado de
deformação/tensão no qual o cisalhamento é nulo. Esses planos são denominados planos
principais cujas deformações/tensões são denominadas principais. Para um estado de plano
tem-se situação ilustrada na Figura 2.5.
Moh
equa
De f
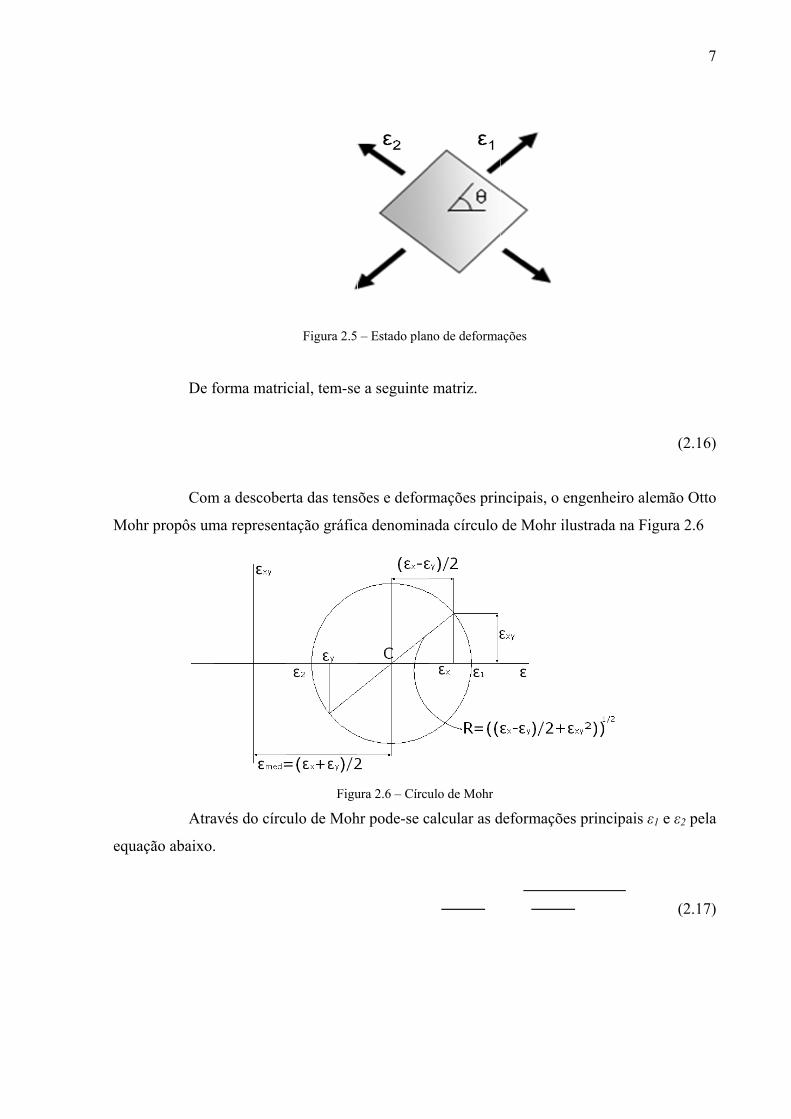
Com
hr propôs um
Atra
ação abaixo.
forma matri
m a descobe
ma represent
avés do círc
.
Figura 2.5
icial, tem-se
rta das tens
tação gráfic
Figu
ulo de Moh
– Estado plan
e a seguinte
sões e deform
ca denomina
ura 2.6 – Círcu
hr pode-se c
no de deforma
matriz.
mações prin
ada círculo
ulo de Mohr
calcular as d
ações
ncipais, o en
de Mohr ilu
deformações
ngenheiro a
ustrada na F
s principais
7
(2.16)
alemão Otto
Figura 2.6
ε1 e ε2 pela
(2.17)
7
)
o
a
)
8
2.3 Teorias de falha
Quando da elaboração de um projeto com um material específico, o engenheiro
deve estabelecer um limite superior para o estado de tensão que defina a falha do material. Se
o material é dúctil, geralmente a falha é especificada pelo início do escoamento; se o material
é frágil, ela é especificada pela fratura (HIBBELER, 2000).
Segundo a teoria de falha, um material dúctil falhará devido a tensão/deformação
de cisalhamento máxima e um material frágil pela tensão/deformação normal máxima.
Considerando o concreto como um material frágil, este pode ser analisado por
duas teorias de falha: a de Rankine e a de Mohr.
A teoria de Rankine é aplicável a materiais que possuem comportamentos
semelhantes quando submetidos à compressão e tração. Esta teoria foi estabelecida através de
um ensaio de tração e de torção. No caso do ensaio de tração, constatou-se que a fratura
ocorre quando a tensão normal atinge o limite de resistência (σr). No ensaio de torção
verificou-se que a fratura ocorre devido à tração máxima que está a 45° em relação à direção
do cisalhamento. Além disso, experimentos mostraram que durante a torção a resistência do
material não é afetada pela presença da tensão de compressão principal (HIBBELER, 2000).
Logo, a tensão de tração necessária para fraturar um corpo será aproximadamente a mesma
necessária para fraturar um corpo-de-prova sob tração simples. Com isso, a envoltória de
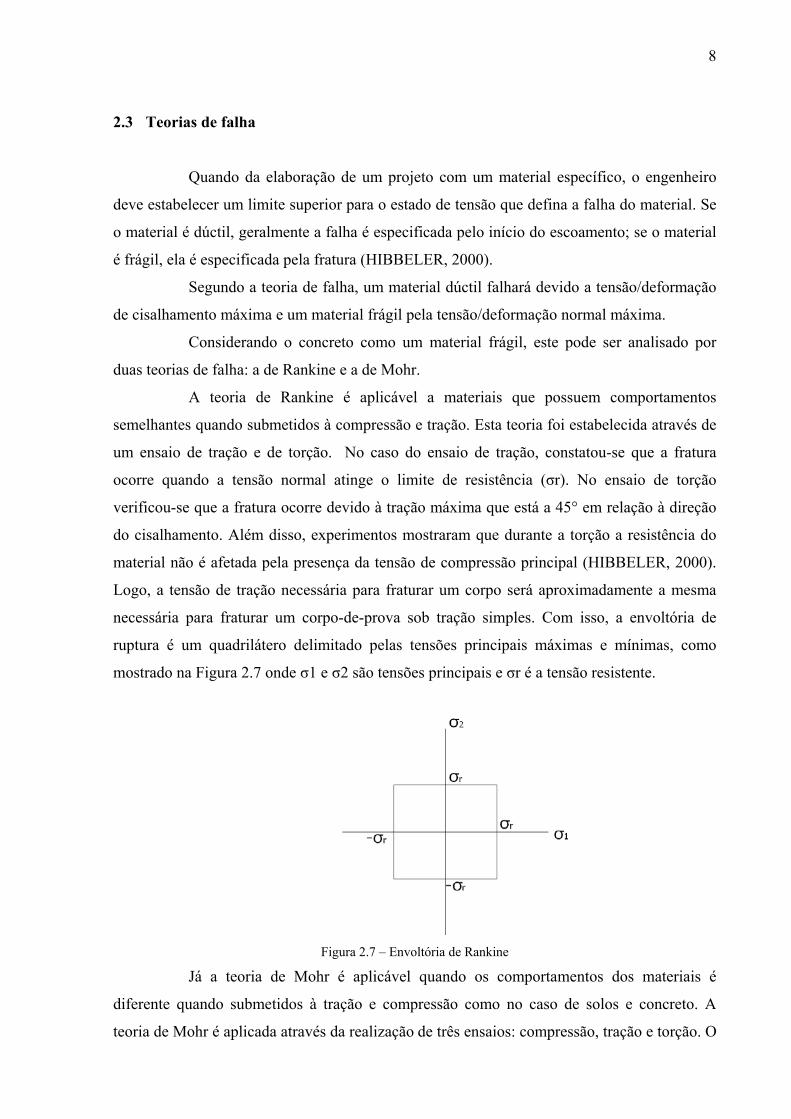
ruptura é um quadrilátero delimitado pelas tensões principais máximas e mínimas, como
mostrado na Figura 2.7 onde σ1 e σ2 são tensões principais e σr é a tensão resistente.
Figura 2.7 – Envoltória de Rankine
Já a teoria de Mohr é aplicável quando os comportamentos dos materiais é
diferente quando submetidos à tração e compressão como no caso de solos e concreto. A
teoria de Mohr é aplicada através da realização de três ensaios: compressão, tração e torção. O
9
ensaio de compressão e tração permite estabelecer os limites de resistência a compressão e
tração, respectivamente. Com o ensaio de torção determina-se a resistência ao cisalhamento
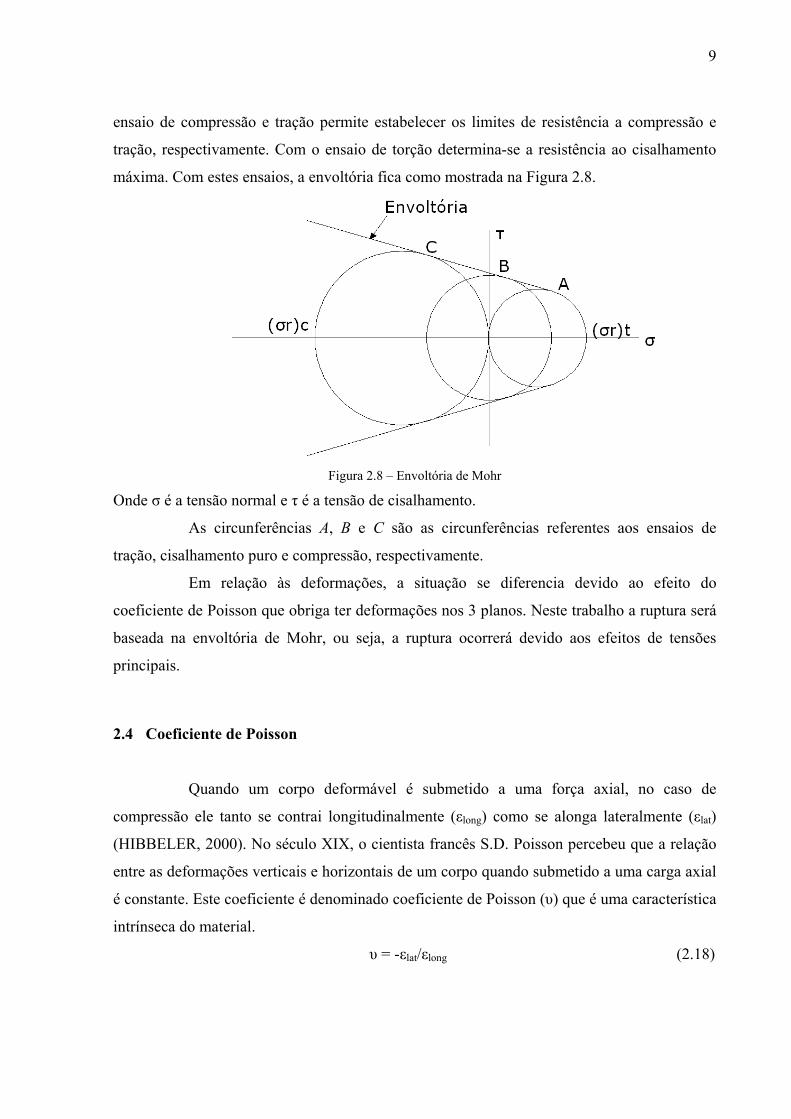
máxima. Com estes ensaios, a envoltória fica como mostrada na Figura 2.8.
Figura 2.8 – Envoltória de Mohr
Onde σ é a tensão normal e τ é a tensão de cisalhamento.
As circunferências A, B e C são as circunferências referentes aos ensaios de
tração, cisalhamento puro e compressão, respectivamente.
Em relação às deformações, a situação se diferencia devido ao efeito do
coeficiente de Poisson que obriga ter deformações nos 3 planos. Neste trabalho a ruptura será
baseada na envoltória de Mohr, ou seja, a ruptura ocorrerá devido aos efeitos de tensões
principais.
2.4 Coeficiente de Poisson
Quando um corpo deformável é submetido a uma força axial, no caso de
compressão ele tanto se contrai longitudinalmente (εlong) como se alonga lateralmente (εlat)
(HIBBELER, 2000). No século XIX, o cientista francês S.D. Poisson percebeu que a relação
entre as deformações verticais e horizontais de um corpo quando submetido a uma carga axial
é constante. Este coeficiente é denominado coeficiente de Poisson (υ) que é uma característica
intrínseca do material.
υ = -εlat/εlong (2.18)
10
O coeficiente de Poisson é um parâmetro adimensional cujo valor é compreendido
entre 0 e 0,5. No caso do concreto, o coeficiente de Poisson está em torno de 0,2 (MEHTA &
MONTEIRO, 1994, p.43).
Para um estado de tensão triaxial, as deformações normais podem ser expressas
através da lei de Hooke generalizada, dada por:
1/ (2.19)
1/ (2.20)
1/ (2.21)
Estas equações são válidas para um material linear, ou seja, para pequenas
deformações.
2.5 Concreto
O concreto é, depois da pedra, madeira e argila, um dos materiais de construção
mais antigos que a humanidade conhece. Concreto de Cimento Portland é um material
composto que consiste essencialmente de um meio contínuo, dentro do qual estão
mergulhadas partículas ou fragmentos de agregados. No concreto de cimento hidráulico, o
meio aglomerante é formado por uma mistura de cimento hidráulico e água (MEHTA &
MONTEIRO, 1994, p.08). Os agregados são compostos por agregado graúdo e miúdo,
usualmente, brita e areia, respectivamente.
Quando recém-misturado, deve oferecer condições tais de plasticidade que
facilitem as operações de manuseio indispensáveis ao lançamento nas formas, adquirindo,
com o tempo, pelas reações que então se processarem entre aglomerante e água, coesão e
resistência.
A resposta do concreto às tensões aplicadas não depende somente do tipo de
solicitação, mas também de como a combinação de vários fatores afeta a porosidade dos
diferentes componentes estruturais do concreto (MEHTA & MONTEIRO, 1994, p.47). Esses
fatores contribuem para que o concreto não seja um material homogêneo e não isotrópico o
que resulta em regiões de fragilidade devido a falhas de interação entre a pasta de cimento e
seus agregados. Todos esses fatores afetam a transmissão de tensões e, por conseqüência, de
deformações.
11
2.6 Velocímetro por Correlação de Imagens (CIV)
A técnica do Velocímetro por Correlação de Imagens (Correlation Image
Velocimetry) permite determinar o campo de deslocamentos em pixels entre duas imagens
representando o mesmo objeto em estágios diferentes.
Em informática e em foto numérica, uma imagem é constituída de um conjunto de
elementos chamado pixel. O pixel é uma unidade de superfície que permite definir a base de
uma imagem numérica, ou seja, o pixel é o menor elemento constituinte de uma imagem. A
unidade de medida mais comum é o megapixel que corresponde a uma superfície de
1000x1000pixel.
2.6.1 Escala de cinza
Uma imagem numérica pode ser considerada como uma matriz de pixels
distribuídos em um eixo cartesiano X,Y. Em uma imagem colorida, a cada pixel está
associada uma cor que possui três componentes de nível de brilho (vermelho, verde, azul),
variando-se a intensidade de cada componente são obtidas diversas cores. No entanto, no
cálculo de deslocamentos é conveniente trabalhar com uma imagem em preto e branco
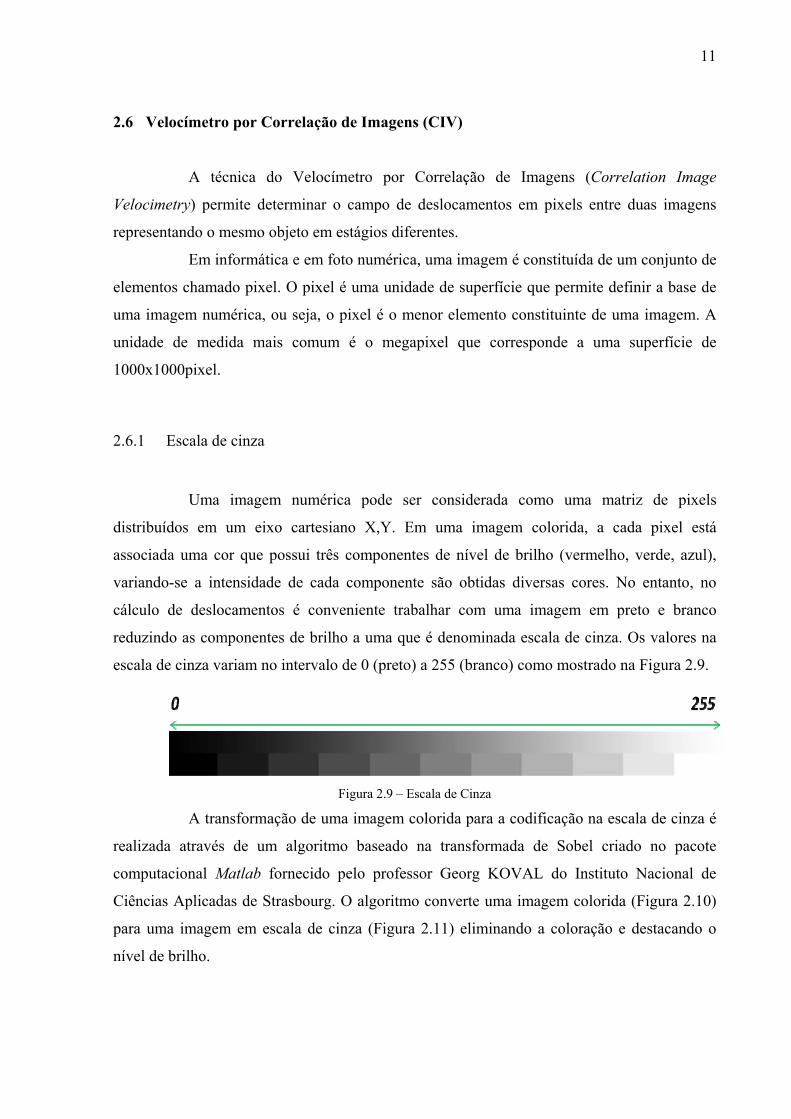
reduzindo as componentes de brilho a uma que é denominada escala de cinza. Os valores na
escala de cinza variam no intervalo de 0 (preto) a 255 (branco) como mostrado na Figura 2.9.
Figura 2.9 – Escala de Cinza
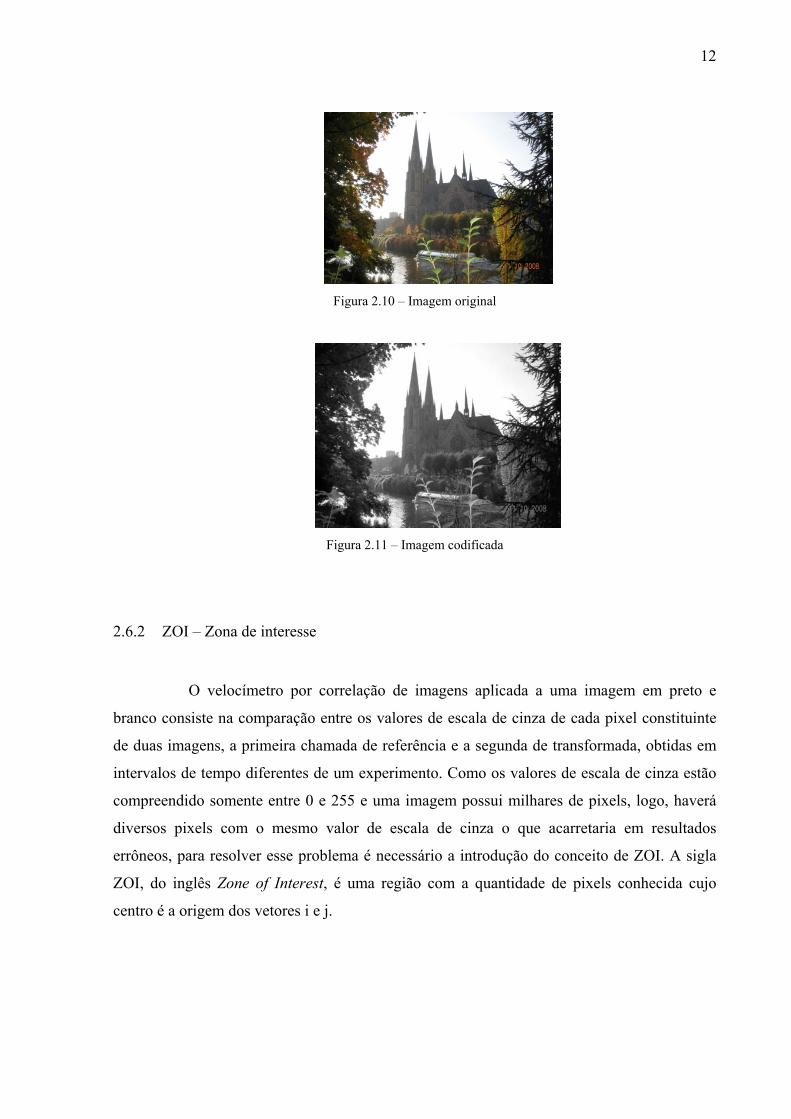
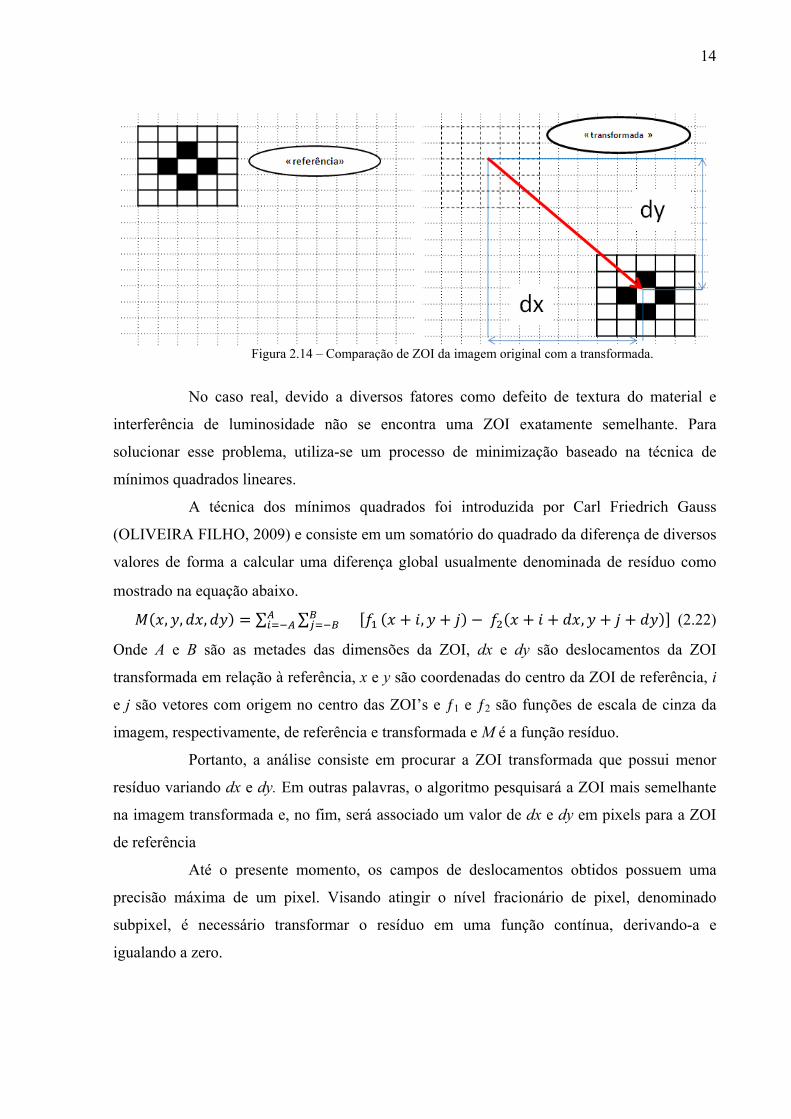
A transformação de uma imagem colorida para a codificação na escala de cinza é
realizada através de um algoritmo baseado na transformada de Sobel criado no pacote
computacional Matlab fornecido pelo professor Georg KOVAL do Instituto Nacional de
Ciências Aplicadas de Strasbourg. O algoritmo converte uma imagem colorida (Figura 2.10)
para uma imagem em escala de cinza (Figura 2.11) eliminando a coloração e destacando o
nível de brilho.
12
Figura 2.10 – Imagem original
Figura 2.11 – Imagem codificada
2.6.2 ZOI – Zona de interesse
O velocímetro por correlação de imagens aplicada a uma imagem em preto e
branco consiste na comparação entre os valores de escala de cinza de cada pixel constituinte
de duas imagens, a primeira chamada de referência e a segunda de transformada, obtidas em
intervalos de tempo diferentes de um experimento. Como os valores de escala de cinza estão
compreendido somente entre 0 e 255 e uma imagem possui milhares de pixels, logo, haverá
diversos pixels com o mesmo valor de escala de cinza o que acarretaria em resultados
errôneos, para resolver esse problema é necessário a introdução do conceito de ZOI. A sigla
ZOI, do inglês Zone of Interest, é uma região com a quantidade de pixels conhecida cujo
centro é a origem dos vetores i e j.

13
Figura 2.12 – ZOI (Zone of interest)
Figura 2.13 – ZOI em uma imagem
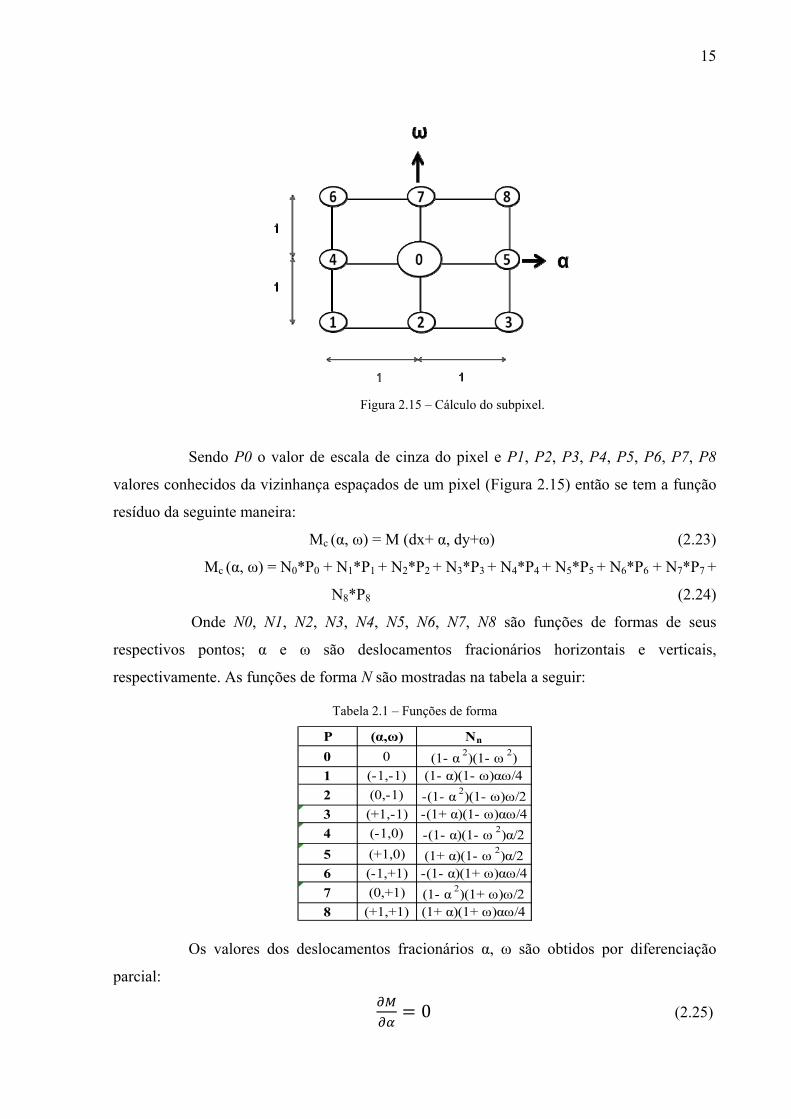
Com a introdução do conceito de ZOI, a análise das imagens continua sendo de
pixel a pixel de uma ZOI de referência e de uma ZOI transformada, no entanto, o campo de
deslocamento obtido seria referente à ZOI, em outras palavras, teoricamente, o algoritmo
pesquisaria em uma determinada região da imagem transformada a ZOI semelhante a uma
ZOI de referência (Figura 2.14).
14
Figura 2.14 – Comparação de ZOI da imagem original com a transformada.
No caso real, devido a diversos fatores como defeito de textura do material e
interferência de luminosidade não se encontra uma ZOI exatamente semelhante. Para
solucionar esse problema, utiliza-se um processo de minimização baseado na técnica de
mínimos quadrados lineares.
A técnica dos mínimos quadrados foi introduzida por Carl Friedrich Gauss
(OLIVEIRA FILHO, 2009) e consiste em um somatório do quadrado da diferença de diversos
valores de forma a calcular uma diferença global usualmente denominada de resíduo como
mostrado na equação abaixo.
, , , ∑ ∑ , , (2.22)
Onde A e B são as metades das dimensões da ZOI, dx e dy são deslocamentos da ZOI
transformada em relação à referência, x e y são coordenadas do centro da ZOI de referência, i
e j são vetores com origem no centro das ZOI’s e ƒ1 e ƒ2 são funções de escala de cinza da
imagem, respectivamente, de referência e transformada e M é a função resíduo.
Portanto, a análise consiste em procurar a ZOI transformada que possui menor
resíduo variando dx e dy. Em outras palavras, o algoritmo pesquisará a ZOI mais semelhante
na imagem transformada e, no fim, será associado um valor de dx e dy em pixels para a ZOI
de referência
Até o presente momento, os campos de deslocamentos obtidos possuem uma
precisão máxima de um pixel. Visando atingir o nível fracionário de pixel, denominado
subpixel, é necessário transformar o resíduo em uma função contínua, derivando-a e
igualando a zero.
15
Figura 2.15 – Cálculo do subpixel.
Sendo P0 o valor de escala de cinza do pixel e P1, P2, P3, P4, P5, P6, P7, P8
valores conhecidos da vizinhança espaçados de um pixel (Figura 2.15) então se tem a função
resíduo da seguinte maneira:
Mc (α, ω) = M (dx+ α, dy+ω) (2.23)
Mc (α, ω) = N0*P0 + N1*P1 + N2*P2 + N3*P3 + N4*P4 + N5*P5 + N6*P6 + N7*P7 +
N8*P8 (2.24)
Onde N0, N1, N2, N3, N4, N5, N6, N7, N8 são funções de formas de seus
respectivos pontos; α e ω são deslocamentos fracionários horizontais e verticais,
respectivamente. As funções de forma N são mostradas na tabela a seguir:
Tabela 2.1 – Funções de forma
P (α,ω) Nn
0 0 (1- α 2)(1- ω 2)1 (-1,-1) (1- α)(1- ω)αω/4
2 (0,-1) -(1- α 2)(1- ω)ω/23 (+1,-1) -(1+ α)(1- ω)αω/4
4 (-1,0) -(1- α)(1- ω 2)α/2
5 (+1,0) (1+ α)(1- ω 2)α/26 (-1,+1) -(1- α)(1+ ω)αω/4
7 (0,+1) (1- α 2)(1+ ω)ω/28 (+1,+1) (1+ α)(1+ ω)αω/4
Os valores dos deslocamentos fracionários α, ω são obtidos por diferenciação
parcial:
0 (2.25)
16
0 (2.26)
Por conseqüência, o deslocamento final D é a soma da parte inteira com a parte
fracionária.
DX = dx + αc (2.27)
DY = dy + ωc (2.28)
2.6.3 Parâmetros de Entrada
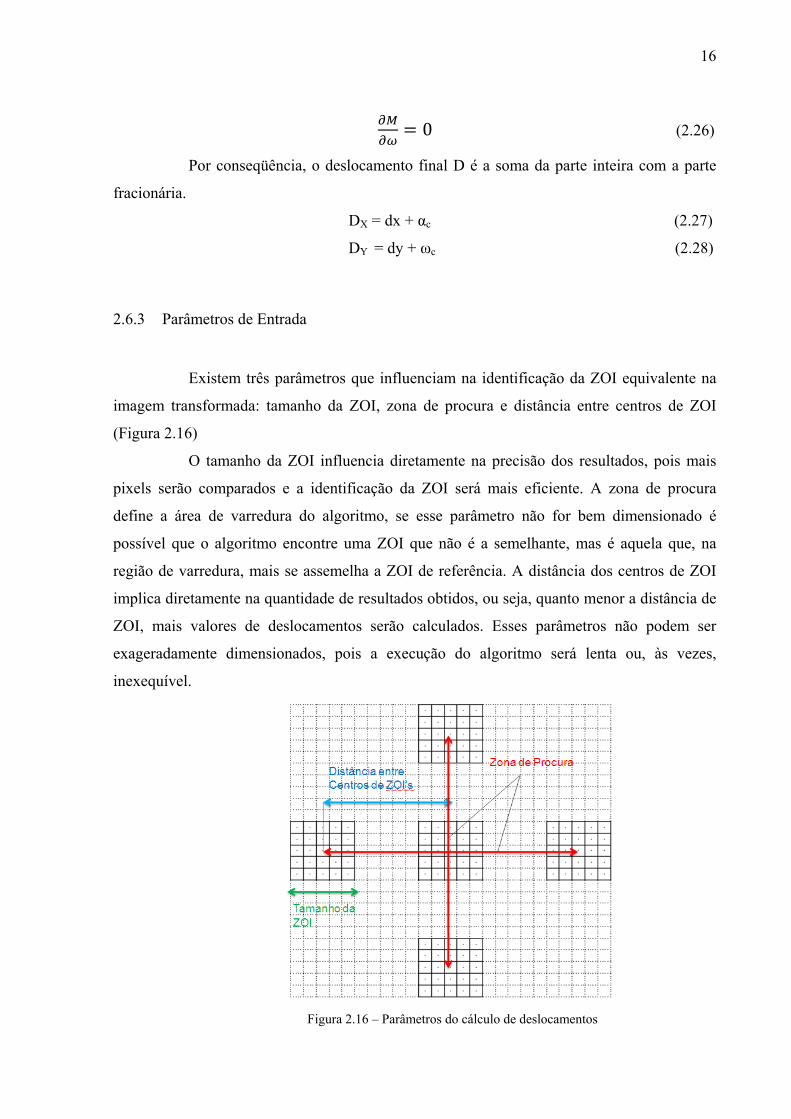
Existem três parâmetros que influenciam na identificação da ZOI equivalente na
imagem transformada: tamanho da ZOI, zona de procura e distância entre centros de ZOI
(Figura 2.16)
O tamanho da ZOI influencia diretamente na precisão dos resultados, pois mais
pixels serão comparados e a identificação da ZOI será mais eficiente. A zona de procura
define a área de varredura do algoritmo, se esse parâmetro não for bem dimensionado é
possível que o algoritmo encontre uma ZOI que não é a semelhante, mas é aquela que, na
região de varredura, mais se assemelha a ZOI de referência. A distância dos centros de ZOI
implica diretamente na quantidade de resultados obtidos, ou seja, quanto menor a distância de
ZOI, mais valores de deslocamentos serão calculados. Esses parâmetros não podem ser
exageradamente dimensionados, pois a execução do algoritmo será lenta ou, às vezes,
inexequível.
Figura 2.16 – Parâmetros do cálculo de deslocamentos
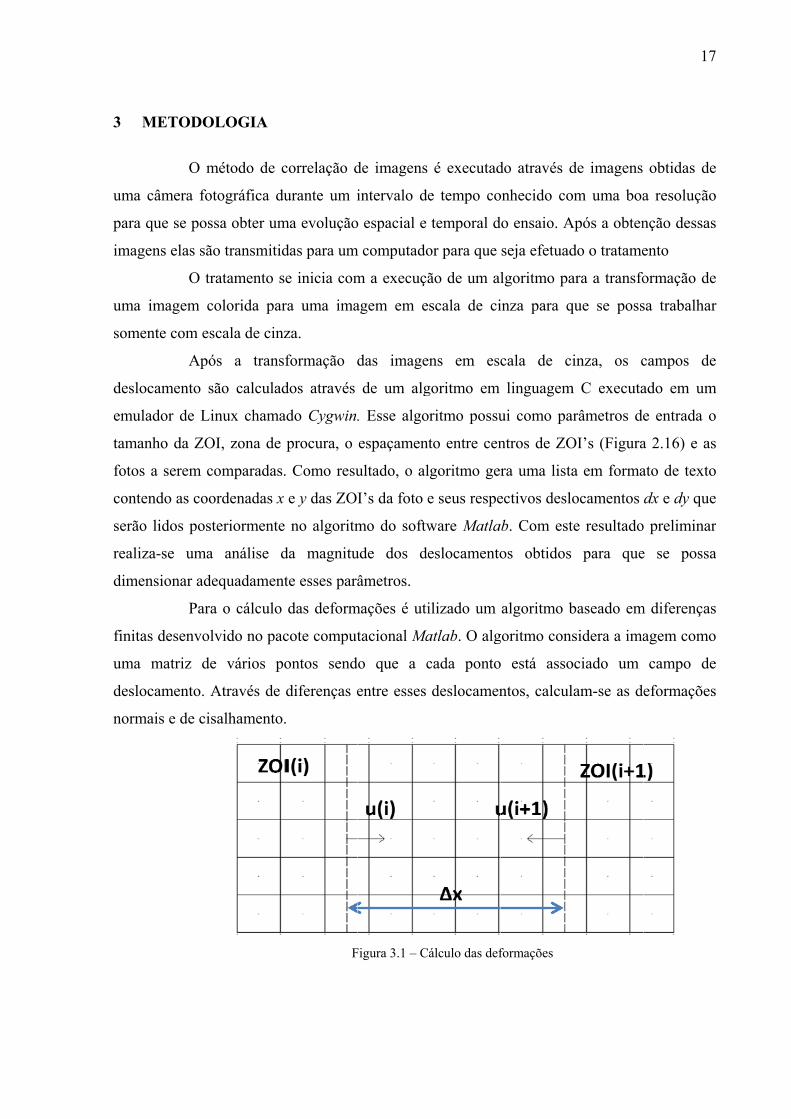
3 M
uma
para
imag
uma
some
deslo
emul
tama
fotos
conte
serão
realiz
dime
finita
uma
deslo
norm
METODO
O m
câmera fot
que se poss
gens elas são
O tr
imagem co
ente com es
Apó
ocamento s
lador de Li
anho da ZO
s a serem co
endo as coo
o lidos post
za-se uma
ensionar ade
Para
as desenvolv
matriz de
ocamento. A
mais e de cis
LOGIA
método de c
tográfica du
sa obter um
o transmitid
ratamento se
olorida par
scala de cinz
ós a transf
ão calculad
nux chama
OI, zona de
omparadas.
ordenadas x
teriormente
análise d
equadament
a o cálculo
vido no pac
e vários po
Através de
salhamento.
correlação d
urante um i
ma evolução
das para um
e inicia com
ra uma ima
za.
formação d
dos através
do Cygwin.
procura, o
Como resu
e y das ZO
no algoritm
da magnitu
te esses parâ
das deform
cote comput
ontos send
diferenças e
F
de imagens
intervalo de
o espacial e
m computado
m a execuçã
agem em e
das image
de um alg
. Esse algo
espaçament
ultado, o al
I’s da foto e
mo do softw
ude dos de
âmetros.
mações é uti
tacional Ma
do que a c
entre esses
Figura 3.1 – Cá
é executad
e tempo co
temporal d
or para que
ão de um al
scala de ci
ns em esc
goritmo em
ritmo possu
to entre cen
lgoritmo ge
e seus respe
ware Matla
eslocamento
ilizado um
atlab. O alg
cada ponto
deslocamen
álculo das def
do através d
onhecido co
do ensaio. A
seja efetuad
lgoritmo pa
inza para q
cala de c
linguagem
ui como pa
ntros de ZO
ra uma lista
ectivos deslo
b. Com est
os obtidos
algoritmo b
goritmo con
o está asso
ntos, calcul
formações
de imagens
om uma boa
Após a obten
do o tratame
ara a transfo
que se poss
inza, os c
m C executa
arâmetros de
OI’s (Figura
a em forma
ocamentos
te resultado
para que
baseado em
sidera a ima
ociado um
lam-se as d
17
obtidas de
a resolução
nção dessas
ento
ormação de
sa trabalhar
campos de
ado em um
e entrada o
a 2.16) e as
ato de texto
dx e dy que
o preliminar
e se possa
m diferenças
agem como
campo de
eformações
7
e
o
s
e
r
e
m
o
s
o
e
r
a
s
o
e
s
18
4 ENSAIOS
Os ensaios mecânicos executados é o de compressão axial de um corpo de prova
cilíndrico de concreto simples e de flexão pura em uma viga de concreto armado.
4.1 Compressão axial
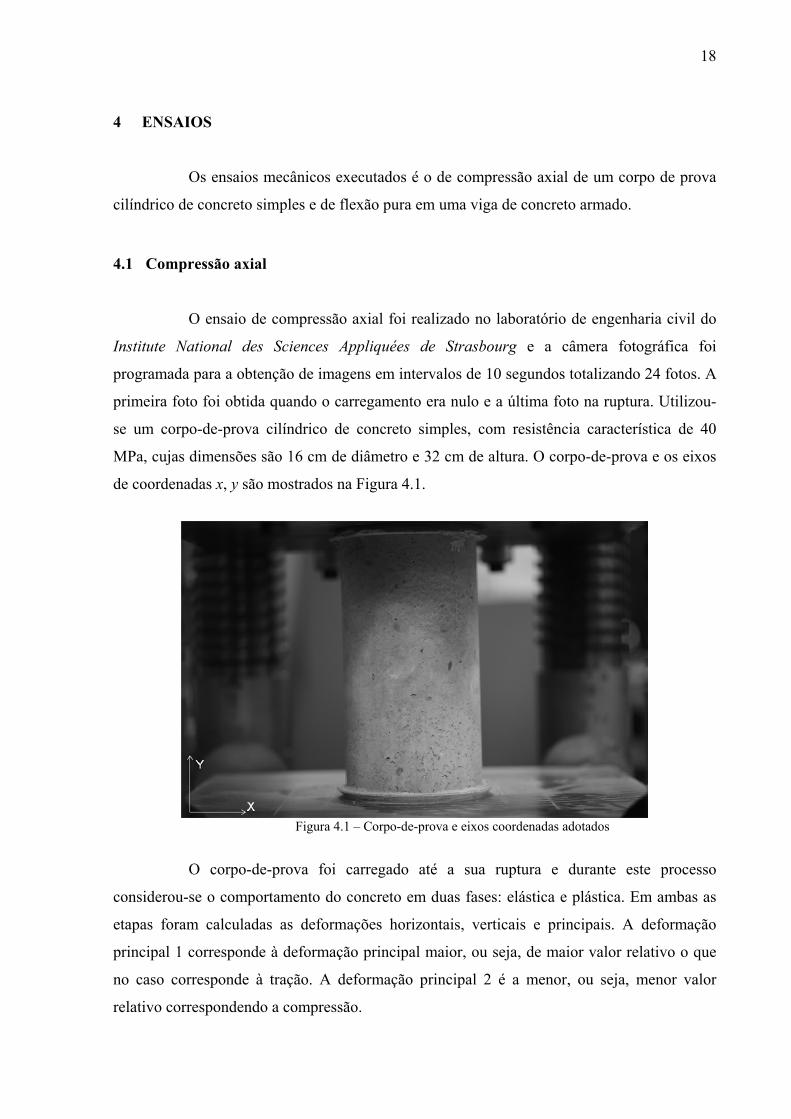
O ensaio de compressão axial foi realizado no laboratório de engenharia civil do
Institute National des Sciences Appliquées de Strasbourg e a câmera fotográfica foi
programada para a obtenção de imagens em intervalos de 10 segundos totalizando 24 fotos. A
primeira foto foi obtida quando o carregamento era nulo e a última foto na ruptura. Utilizou-
se um corpo-de-prova cilíndrico de concreto simples, com resistência característica de 40
MPa, cujas dimensões são 16 cm de diâmetro e 32 cm de altura. O corpo-de-prova e os eixos
de coordenadas x, y são mostrados na Figura 4.1.
Figura 4.1 – Corpo-de-prova e eixos coordenadas adotados
O corpo-de-prova foi carregado até a sua ruptura e durante este processo
considerou-se o comportamento do concreto em duas fases: elástica e plástica. Em ambas as
etapas foram calculadas as deformações horizontais, verticais e principais. A deformação
principal 1 corresponde à deformação principal maior, ou seja, de maior valor relativo o que
no caso corresponde à tração. A deformação principal 2 é a menor, ou seja, menor valor
relativo correspondendo a compressão.

19
Observa-se que os resultados das deformações são dependentes dos campos de
deslocamentos obtidos. Todo aparelho de medição de engenharia possui uma precisão ou uma
margem de erro e para verificar esta precisão é realizado um teste com uma imagem com
dimensão de 1000 x 591 pixels (Figura 4.2). Neste teste compara-se uma imagem com ela
mesma comprimida em 1% na direção horizontal (Figura 4.3) através do software Paint o que
corresponde a um deslocamento de 10 pixels.
Figura 4.2 – Imagem de referência
Figura 4.3 – Imagem transformada com compressão de 1%
Para calcular os deslocamentos em todos os ensaios são utilizados o tamanho de
ZOI de 128 pixels, zona de procura de 40 pixels e espaçamento de ZOI de 32 pixels. A zona
de procura de 40 pixels é adequada para este teste, pois ela permite uma procura de 20 pixels
20
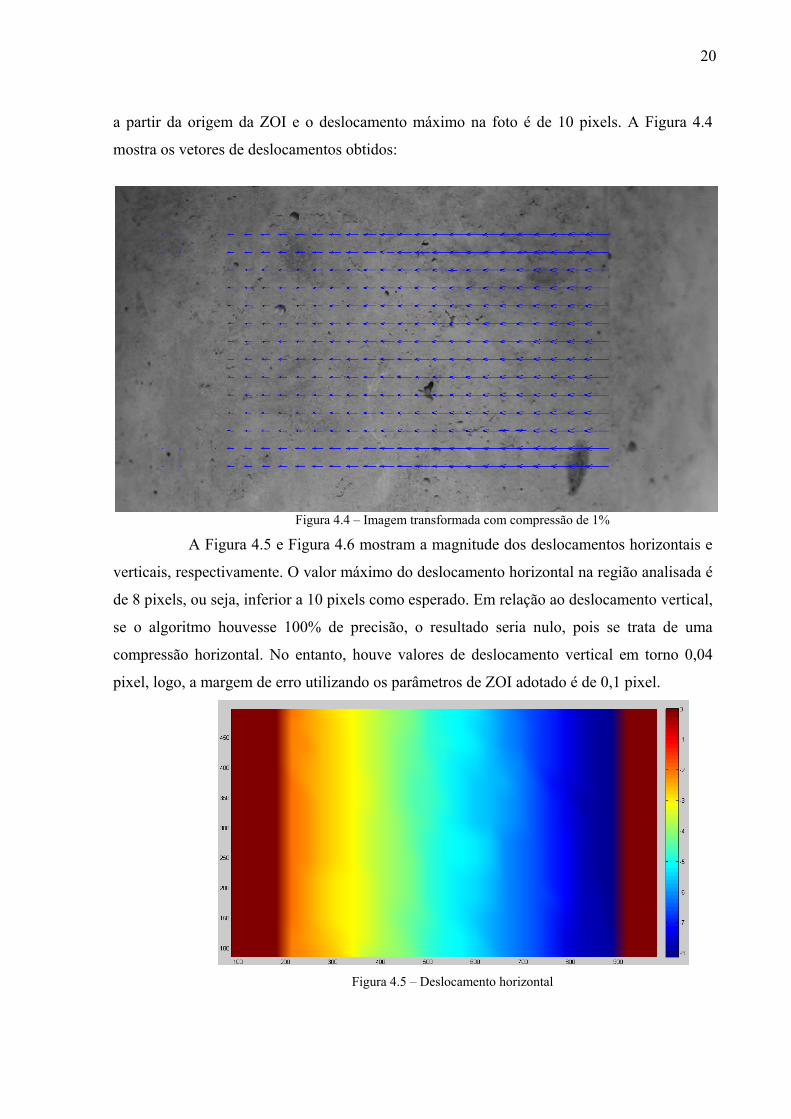
a partir da origem da ZOI e o deslocamento máximo na foto é de 10 pixels. A Figura 4.4
mostra os vetores de deslocamentos obtidos:
Figura 4.4 – Imagem transformada com compressão de 1%
A Figura 4.5 e Figura 4.6 mostram a magnitude dos deslocamentos horizontais e
verticais, respectivamente. O valor máximo do deslocamento horizontal na região analisada é
de 8 pixels, ou seja, inferior a 10 pixels como esperado. Em relação ao deslocamento vertical,
se o algoritmo houvesse 100% de precisão, o resultado seria nulo, pois se trata de uma
compressão horizontal. No entanto, houve valores de deslocamento vertical em torno 0,04
pixel, logo, a margem de erro utilizando os parâmetros de ZOI adotado é de 0,1 pixel.
Figura 4.5 – Deslocamento horizontal

21
Figura 4.6 – Deslocamento vertical
4.1.1 Compressão axial: fase elástica
Para análise da fase elástica, considerou-se um intervalo entre a foto inicial e a
sétima foto de um total de 24, ou seja, correspondente a aproximadamente a um terço da carga
de ruptura o que é válido, pois se considera que o concreto tenha um comportamento linear
até atingir 50% da carga de ruptura (ABNT,2003, p.24). Para evitar interferências do efeito de
bordo do corpo-de-prova trabalhou-se com a região de análise no centro deste como mostrado
na Figura 4.7.

resul
de an
seja,
que m
comp
Estes
deslo
4.8)
de u
marg
impr
onde
A F
ltados do cá
nálise. A m
em um int
mostram de
pressão axi
s valores
ocamentos d
situados reg
ma ZOI e
gem de err
recisa. Logo
e há uma for
Figura 4.8
álculo da de
maior parte d
ervalo de 2
eformações
al, o efeito
provavelme
de ZOI’s sã
gião A estão
a ZOI adja
ro. Uma d
o, conclui-se
rte de difere
Figura 4
mostra os
eformação h
das deforma
2 x 10-4 e 6
s negativas.
o Poisson ca
ente são p
ão pequeno
o em torno d
acente está
diferença d
e que as def
ença de core
4.7 – Região d
deslocamen
horizontal o
ações está re
x 10-4. No
Estes resu
ausa tração
porque em
os como, po
de -0,25 pix
na segunda
de deslocam
formações s
es.
de análise do
ntos horizo
obtidos atra
epresentada
o entanto, e
ultados não
o na direção
m algumas
or exemplo,
xel, ou seja,
a casa deci
mento errôn
são calculad
corpo-de-prov
ontais e a
avés dos de
a na cor am
existem algu
fazem sent
o perpendic
regiões a
, todos os d
, a diferença
imal e na o
nea produz
das mais pre
va.
Figura 4.9
slocamento
marela e verd
uns pontos
tido, pois,
cular ao car
a diferença
deslocamen
a entre o de
ordem de g
zirá uma d
ecisamente
22
mostra os
os na região
de claro, ou
na cor azul
no caso da
rregamento.
a entre os
ntos (Figura
slocamento
grandeza da
deformação
em regiões
2
s
o
u
l
a
.
s
a
o
a
o
s

23
Nos deslocamentos horizontais observa-se uma diferença entre comportamentos
da região A, B e C. A região C possui pequena magnitude nos deslocamentos horizontais, isso
ocorre por causa do atrito existente entre a parte inferior do corpo de prova e a prensa que
impede que o corpo de prova se expanda lateralmente. Este atrito vai sendo reduzido na
medida que se distancia da parte inferior da prensa, já que as tensões normais vão reduzindo,
aumentando os valores de deslocamentos como na região A e B.
Figura 4.8 – Deslocamento horizontal
Figura 4.9 – Deformação horizontal
A Figura 4.10 mostra os resultados da deformação principal 1 que é a de maior
valor relativo, ou seja, tração. Os resultados são semelhantes aos da Figura 4.9 como já era de
se esperar, pois o plano vertical é plano principal de deformação. O cálculo das deformações
24
principais possui a mesma imprecisão que o cálculo das deformações horizontais e os
resultados com precisão desejada possuem valores entre 2 x 10-4 e 4 x 10-4.
Figura 4.10 – Deformação principal 1
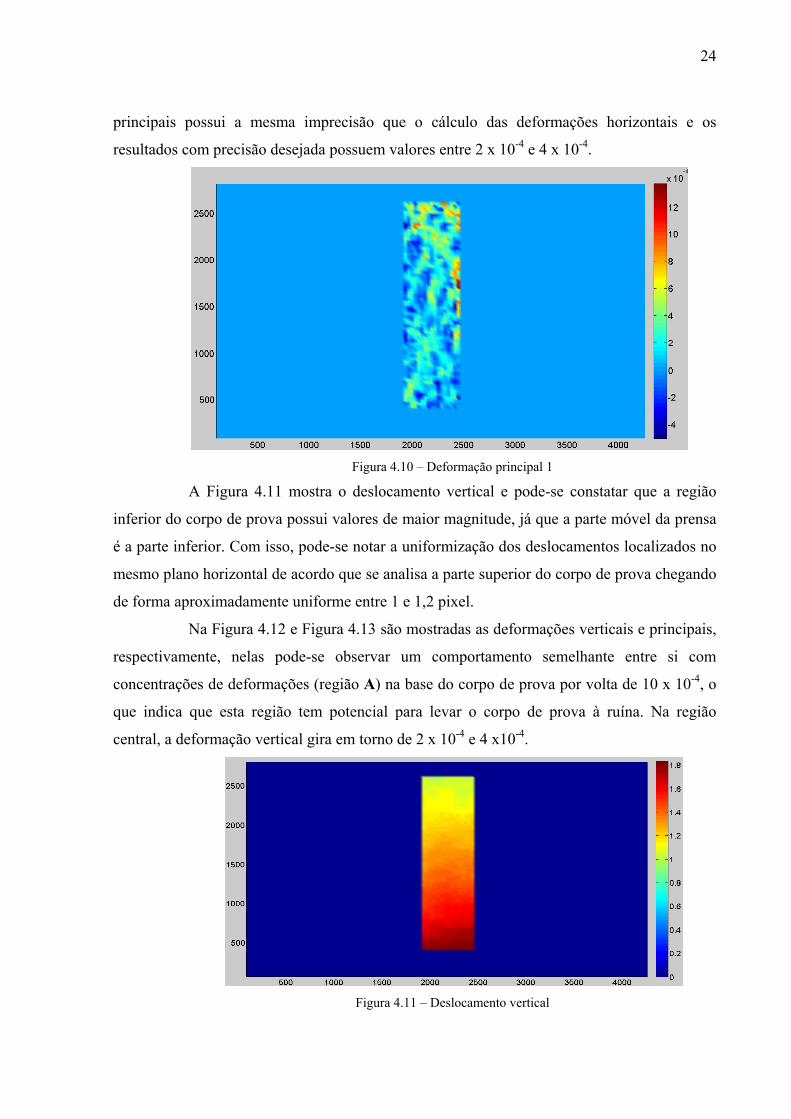
A Figura 4.11 mostra o deslocamento vertical e pode-se constatar que a região
inferior do corpo de prova possui valores de maior magnitude, já que a parte móvel da prensa
é a parte inferior. Com isso, pode-se notar a uniformização dos deslocamentos localizados no
mesmo plano horizontal de acordo que se analisa a parte superior do corpo de prova chegando
de forma aproximadamente uniforme entre 1 e 1,2 pixel.
Na Figura 4.12 e Figura 4.13 são mostradas as deformações verticais e principais,
respectivamente, nelas pode-se observar um comportamento semelhante entre si com
concentrações de deformações (região A) na base do corpo de prova por volta de 10 x 10-4, o
que indica que esta região tem potencial para levar o corpo de prova à ruína. Na região
central, a deformação vertical gira em torno de 2 x 10-4 e 4 x10-4.
Figura 4.11 – Deslocamento vertical

25
Figura 4.12 – Deformação vertical
Figura 4.13 – Deformação principal 2
A Figura 4.14 mostra o valor do coeficiente de Poisson obtido pelo algoritmo.
Para esta análise é importante escolher uma região central que não esteja sofrendo efeito das
bordas da prensa. Na região A observa-se que o coeficiente de Poisson está compreendido
entre 0,1 e 0,18. A NBR 6118 adota o coeficiente de Poisson igual a 0,2 para carga inferior
50% da carga de ruptura. Este valor é obtido em uma região acima de A, o que indica que a
face inferior da prensa influencia significativamente nos resultados. Na análise deste
parâmetro, deve-se levar também em consideração o efeito radial da peça que distorce o valor
da deformação horizontal já que esta possui uma componente fora do plano da figura que não
pode ser calculada.
pelo
empí
4.1.2
de su
Nest
Na
domínio s
íricas, logo,
2 Compres
A fa
ua ruptura,
a etapa, os p
fase elástic
subpixel qu
, isso provo
ssão axial: f
ase plástica
ou seja, a
parâmetros
F
ca pode-se n
ue é uma a
ca muitas v
fase plástica
do materia
comparação
de ZOI são
Figura 4.14 –
notar que a
aproximaçã
vezes resulta
a
al foi consid
o foi feita e
o os mesmos
Coeficiente d
as deformaç
ão baseada
ados errôneo
derada da s
entre a prim
s adotados n
e Poisson
ções são al
em funçõe
os.
sétima foto
meira foto e
na fase elást
ltamente in
es de form
até 30 segu
e a vigésim
tica.
26
nfluenciadas
ma que são
undos antes
ma primeira.
6
s
o
s
.
defor
possu
defor
horiz
Na F
defor
olho
A da
comp
A F
rmações ho
uem uma or
rmações é
zontais e pri
Figura 4.17
rmação de
nu. Observ
a Figura 4.1
pressão, o q
Figura 4.16
orizontais e
rdem de gra
a diferença
incipais pos
7 e Figura
tração que
va-se também
12 da fase
que reforça a
Figur
, Figura 4
e principai
andeza supe
a entre os
ssuem comp
4.18 dest
é o indício
m que esta
elástica ond
a idéia de q
ra 4.15 – Regi
.17 e Figu
s, respectiv
erior a marg
deslocamen
portamentos
aca-se a re
o de uma ab
região A da
de na qual
que esta regi
ão de análise
ura 4.18 sã
vamente. O
gem de erro
ntos entre Z
s semelhant
egião A qu
bertura de f
a Figura 4.1
havia uma
ião causou a
– fase plástica
o os deslo
Os deslocam
o, no entanto
ZOI’s vizin
tes com valo
ue possui
fissura que
17 e Figura
a concentraç
a ruína da p
a
ocamentos h
mentos hor
o, o que inf
nhas. As d
ores em torn
uma conce
não pôde s
4.18 é a me
ção de defo
peça.
27
horizontais,
rizontais já
fluencia nas
eformações
no 1 x 10-3.
entração de
er visível a
esma região
ormação de
7
,
á
s
s
.
e
a
o
e
Fi
F
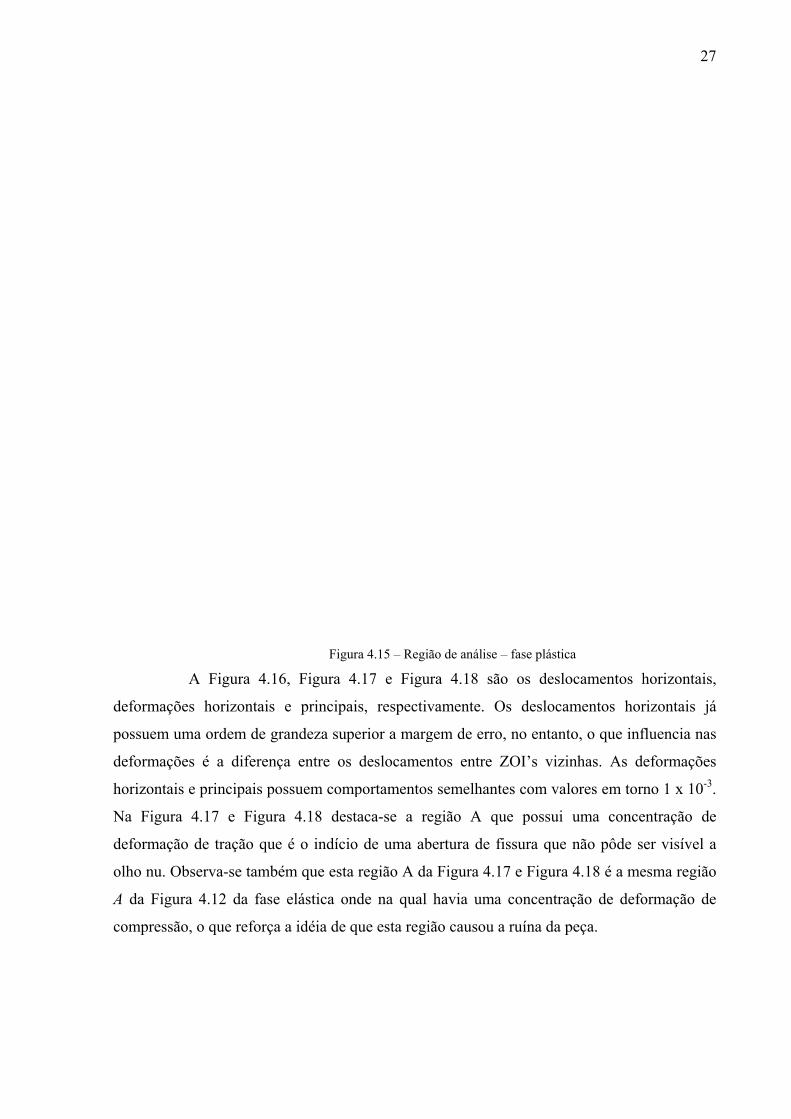
igura 4.16 – D
Figura 4.17 – D
Deslocamento
Deformação H
horizontal
Horizontal
28
8
defor
defor
em t
6118
que é
4.17,
do co
A F
rmação ver
rmação prin
orno de -2
8 para o con
é uma regiã
, Figura 4.1
orpo de prov
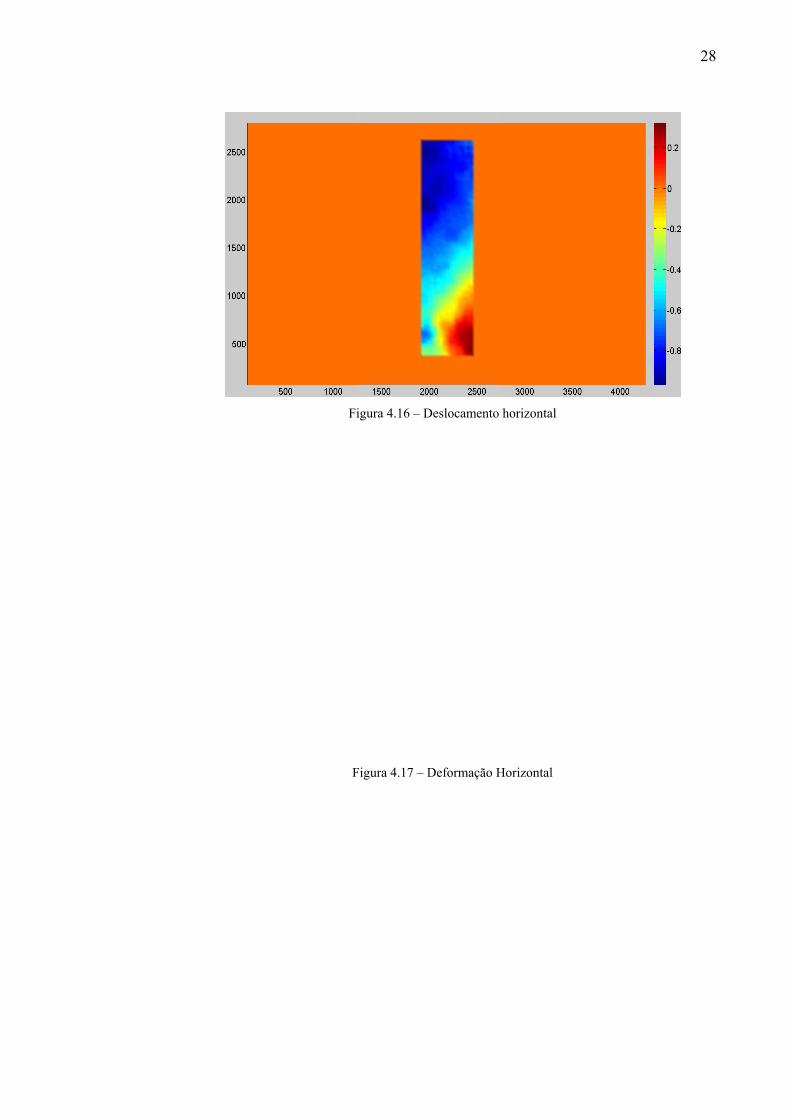
Figura 4.19
rtical e def
ncipal possu
x 10-3 que
ncreto em co
ão de conce
18 e Figura
va.
F
, Figura 4
formação p
uem compo
é exatame
ompressão a
entração de
4.12. Com
F
Figura 4.18 – D
.20 e Figu
principal, re
ortamentos s
nte o valor
axial. Desta
deformaçã
isso, pode-
Figura 4.19 –
Deformação P
ura 4.21 mo
espectivame
similares co
r da deform
aca-se a regi
o que se sit
-se concluir
Deslocamento
Principal 1
ostram o d
ente. A def
om deforma
mação máxim
ião A da Fig
tua na mesm
r que a regi
o vertical
deslocamen
formação v
ações na reg
ma adotado
gura 4.20 e F
ma região A
ião A causo
29
nto vertical,
vertical e a
gião central
o pela NBR
Figura 4.21
A da Figura
ou a ruptura
9
,
a
l
R
a
a

30
Figura 4.20 – Deformação vertical
Figura 4.21 – Deformação principal 2
4.1.3 Compressão axial: Ruptura
A ruptura foi considerada uma foto antes da ruína total do material, ou seja, 10
segundos antes da ruptura. A região de análise (Figura 4.22) é a mesma da fase elástica e
plástica, com uma verificação a olho nu, destacaram-se duas fissuras as quais são indicadas na
Figura 4.23
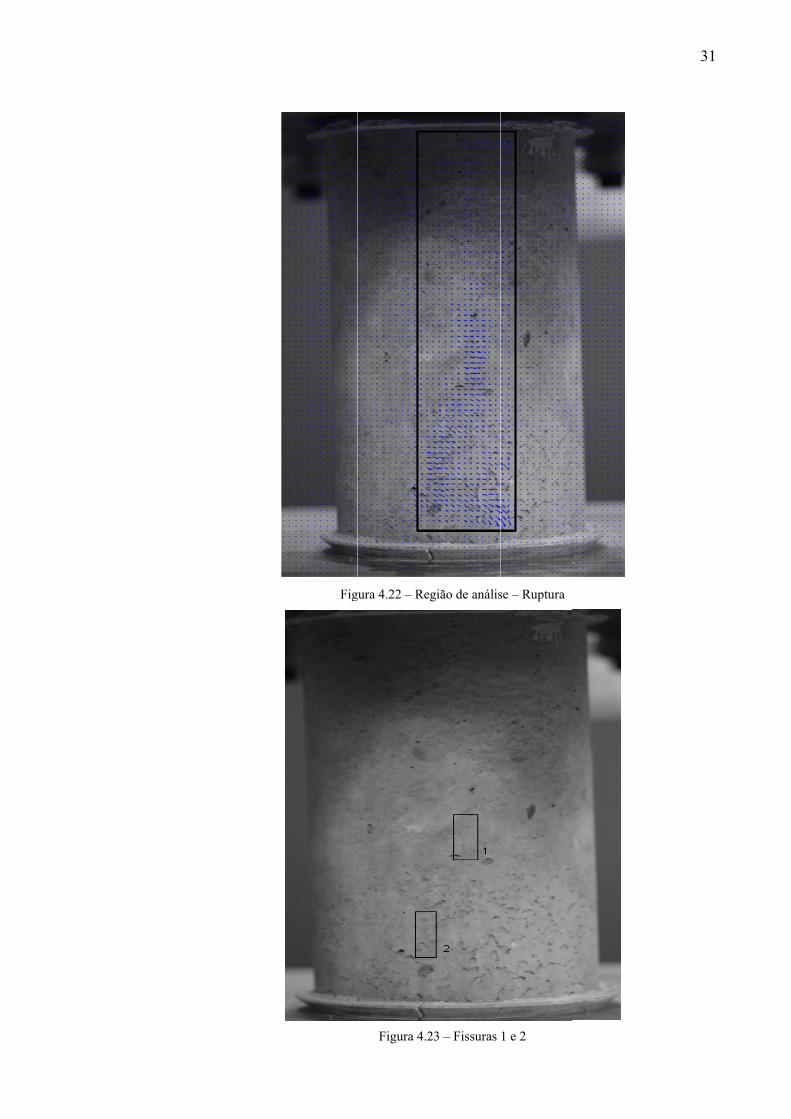
Figgura 4.22 – Re
Figura 4.2
egião de anális
23 – Fissuras
se – Ruptura
1 e 2
31

32
Figura 4.24 – Fissura 1
Figura 4.25 – Fissura 2
A Figura 4.26 mostra a deformação horizontal e nela se destacam as fissuras 1 e 2
com deformações em torno de 14 x 10-3. Observa-se também que é criado um caminho em
azul claro que ligam estas duas fissuras indicando que haverá o deslizamento nesta superfíce
que provocará a ruptura do material.

33
Figura 4.26 – Deformação horizontal com as fissuras 1 e 2
Figura 4.27 – Ruptura
A Figura 4.28 mostra as deformações verticais imediatamente antes da ruptura e
pode-se observar que o corpo sofre deformações na parte inferior que causaram a ruptura e a
parte superior permanece aproximadamente estático.

34
Figura 4.28 – Deformação vertical
Na análise da fase plástica e na ruptura pôde-se notar que o algoritmo foi eficiente
na identificação de fissuras e previsão de falhas. Com isso, conclui-se que o algoritmo é mais
eficiente quanto maior for a diferença entre os deslocamentos, ou seja, quanto maior seja o
deslocamento relativo entre as ZOI’s.
4.2 Flexão pura
O ensaio de flexão pura foi realizado no laboratório de materiais da UFC em uma
viga em concreto armado com seção 15cm x 15cm com um comprimento de 50cm e um vão
de 45cm. A viga é composta por 2 vergalhões de 6,3mm na parte inferior e 2 vergalhões
5,0mm na parte superior com estribos de 5,0mm com espaçamento de 10cm. Este ensaio tem
como objetivo analisar o comportamento de uma viga quando submetida a duas cargas
pontuais aplicadas a 15 cm dos apoios de forma a produzir uma região central onde só haja
flexão. As configurações são mostradas na Figura 4.29.
Figura 4.29 – Modelisação da viga
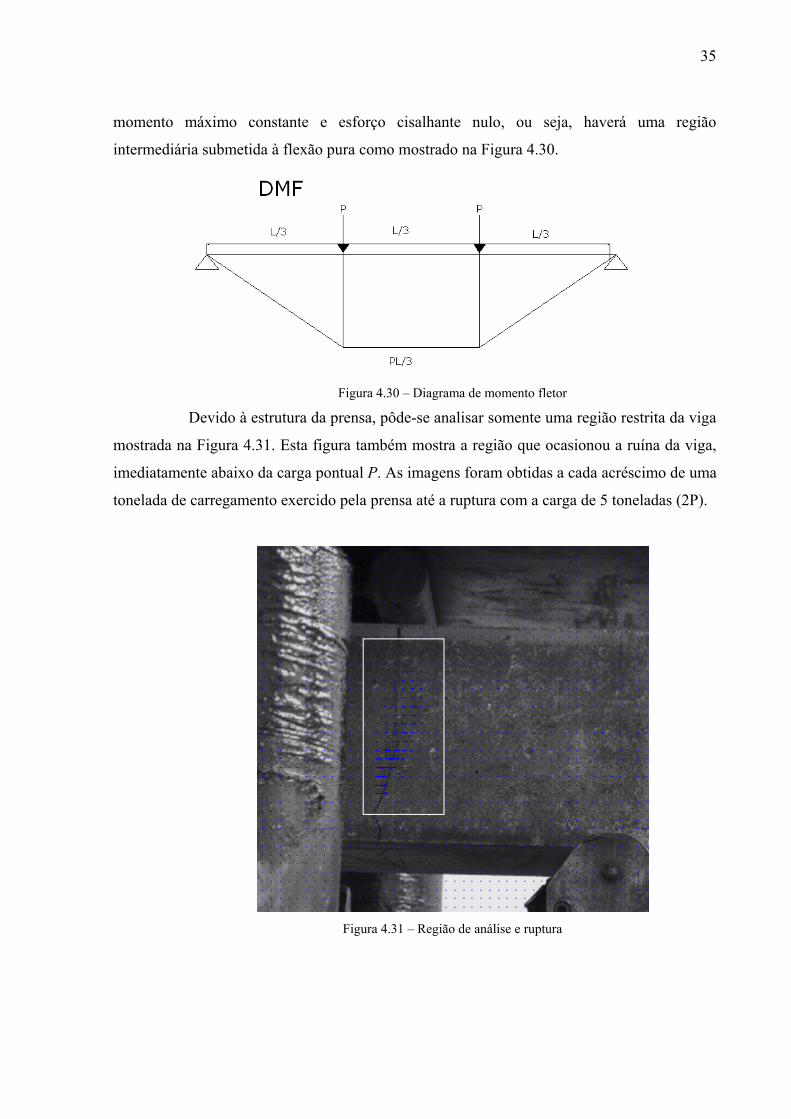
Esta forma de carregamento foi escolhida, pois o diagrama de momento fletor
possui um formato trapezoidal acarretando em uma região entre as cargas P’s onde há um
35
momento máximo constante e esforço cisalhante nulo, ou seja, haverá uma região
intermediária submetida à flexão pura como mostrado na Figura 4.30.
Figura 4.30 – Diagrama de momento fletor
Devido à estrutura da prensa, pôde-se analisar somente uma região restrita da viga
mostrada na Figura 4.31. Esta figura também mostra a região que ocasionou a ruína da viga,
imediatamente abaixo da carga pontual P. As imagens foram obtidas a cada acréscimo de uma
tonelada de carregamento exercido pela prensa até a ruptura com a carga de 5 toneladas (2P).
Figura 4.31 – Região de análise e ruptura
36
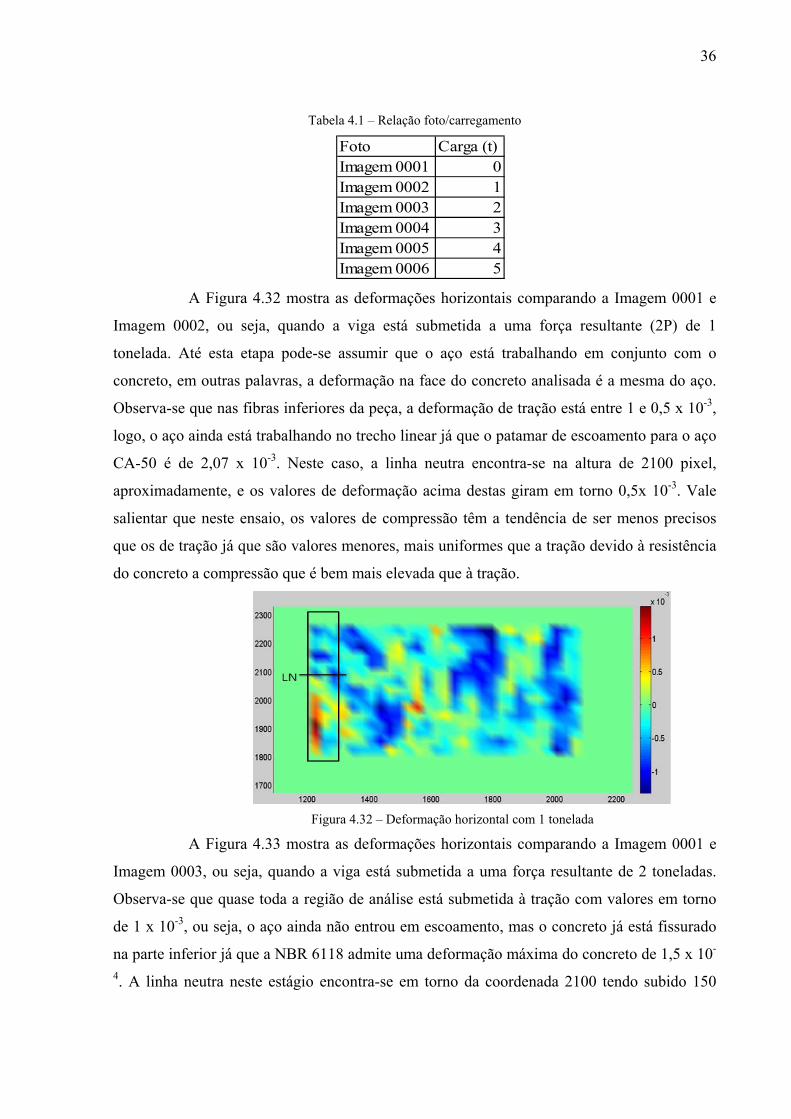
Tabela 4.1 – Relação foto/carregamento
Foto Carga (t)Imagem 0001 0Imagem 0002 1Imagem 0003 2Imagem 0004 3Imagem 0005 4Imagem 0006 5
A Figura 4.32 mostra as deformações horizontais comparando a Imagem 0001 e
Imagem 0002, ou seja, quando a viga está submetida a uma força resultante (2P) de 1
tonelada. Até esta etapa pode-se assumir que o aço está trabalhando em conjunto com o
concreto, em outras palavras, a deformação na face do concreto analisada é a mesma do aço.
Observa-se que nas fibras inferiores da peça, a deformação de tração está entre 1 e 0,5 x 10-3,
logo, o aço ainda está trabalhando no trecho linear já que o patamar de escoamento para o aço
CA-50 é de 2,07 x 10-3. Neste caso, a linha neutra encontra-se na altura de 2100 pixel,
aproximadamente, e os valores de deformação acima destas giram em torno 0,5x 10-3. Vale
salientar que neste ensaio, os valores de compressão têm a tendência de ser menos precisos
que os de tração já que são valores menores, mais uniformes que a tração devido à resistência
do concreto a compressão que é bem mais elevada que à tração.
Figura 4.32 – Deformação horizontal com 1 tonelada
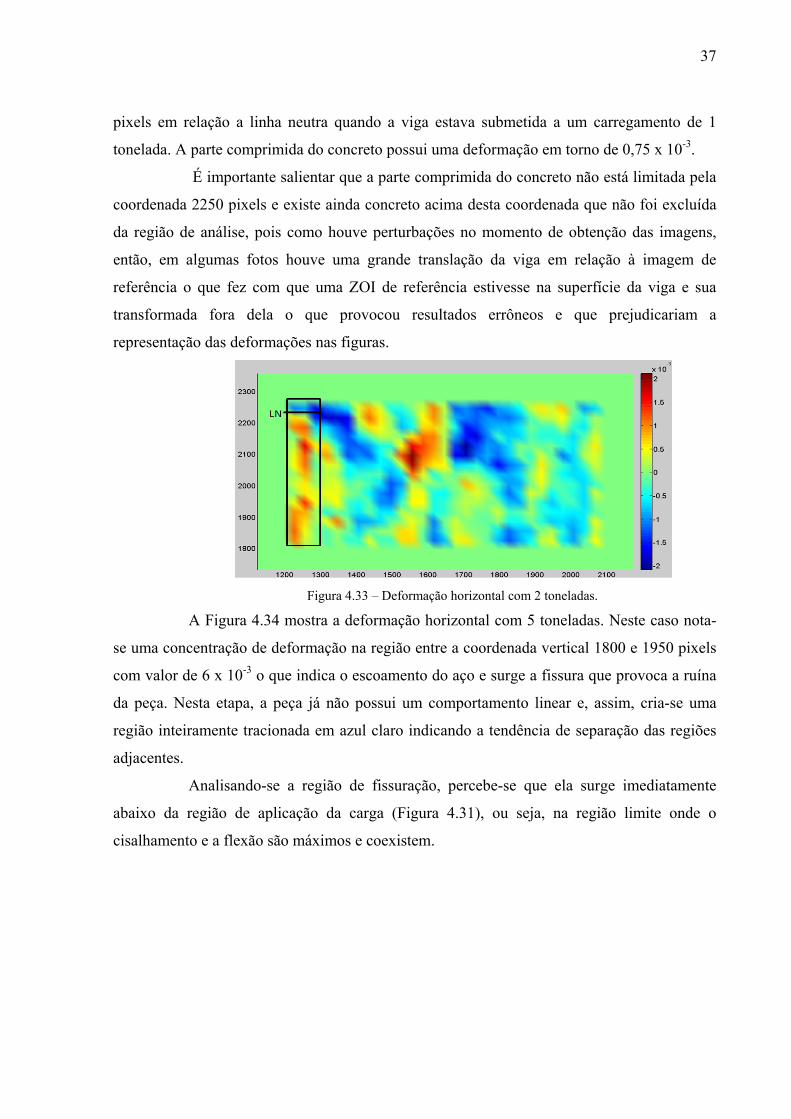
A Figura 4.33 mostra as deformações horizontais comparando a Imagem 0001 e
Imagem 0003, ou seja, quando a viga está submetida a uma força resultante de 2 toneladas.
Observa-se que quase toda a região de análise está submetida à tração com valores em torno
de 1 x 10-3, ou seja, o aço ainda não entrou em escoamento, mas o concreto já está fissurado
na parte inferior já que a NBR 6118 admite uma deformação máxima do concreto de 1,5 x 10-
4. A linha neutra neste estágio encontra-se em torno da coordenada 2100 tendo subido 150
37
pixels em relação a linha neutra quando a viga estava submetida a um carregamento de 1
tonelada. A parte comprimida do concreto possui uma deformação em torno de 0,75 x 10-3.
É importante salientar que a parte comprimida do concreto não está limitada pela
coordenada 2250 pixels e existe ainda concreto acima desta coordenada que não foi excluída
da região de análise, pois como houve perturbações no momento de obtenção das imagens,
então, em algumas fotos houve uma grande translação da viga em relação à imagem de
referência o que fez com que uma ZOI de referência estivesse na superfície da viga e sua
transformada fora dela o que provocou resultados errôneos e que prejudicariam a
representação das deformações nas figuras.
Figura 4.33 – Deformação horizontal com 2 toneladas.
A Figura 4.34 mostra a deformação horizontal com 5 toneladas. Neste caso nota-
se uma concentração de deformação na região entre a coordenada vertical 1800 e 1950 pixels
com valor de 6 x 10-3 o que indica o escoamento do aço e surge a fissura que provoca a ruína
da peça. Nesta etapa, a peça já não possui um comportamento linear e, assim, cria-se uma
região inteiramente tracionada em azul claro indicando a tendência de separação das regiões
adjacentes.
Analisando-se a região de fissuração, percebe-se que ela surge imediatamente
abaixo da região de aplicação da carga (Figura 4.31), ou seja, na região limite onde o
cisalhamento e a flexão são máximos e coexistem.
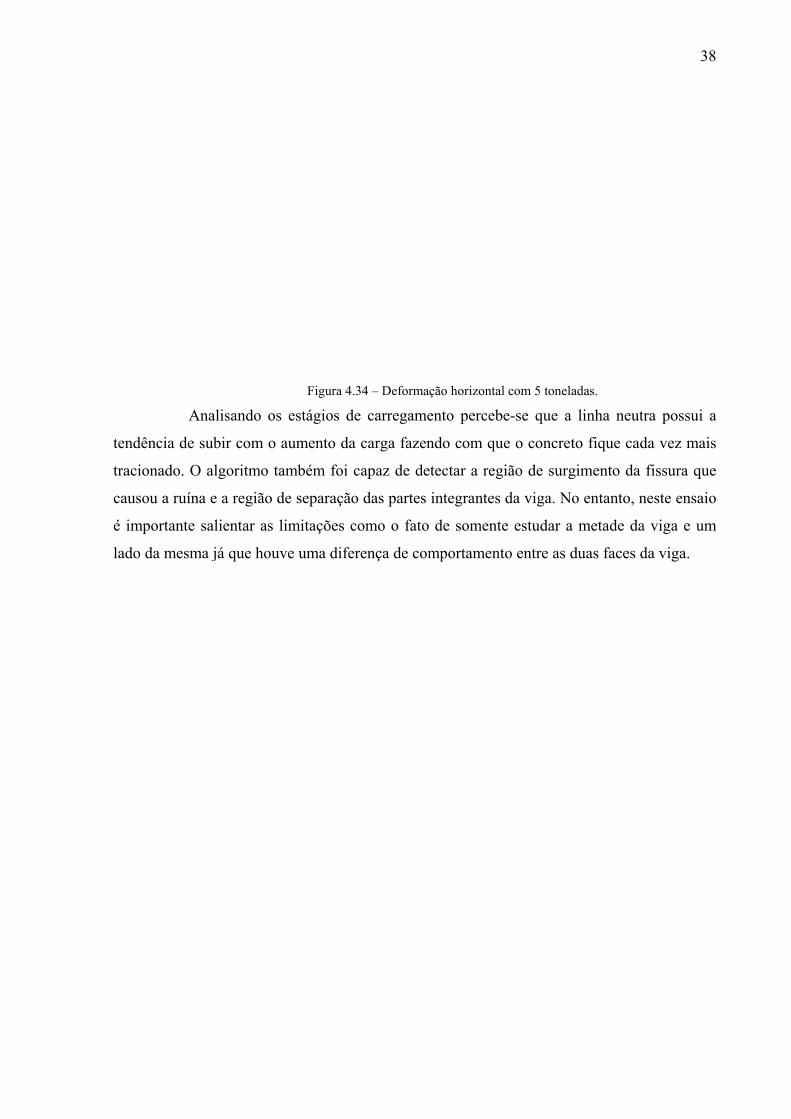
tendê
tracio
causo
é imp
lado
Ana
ência de sub
onado. O al
ou a ruína e
portante sal
da mesma j
alisando os
bir com o a
lgoritmo tam
e a região de
lientar as li
já que houv
Figura 4.3
estágios de
aumento da
mbém foi c
e separação
imitações c
ve uma difer
34 – Deforma
e carregame
carga fazen
capaz de de
o das partes
omo o fato
rença de com
ção horizonta
ento perceb
ndo com qu
etectar a reg
integrantes
de soment
mportament
al com 5 tonela
be-se que a
ue o concret
gião de surg
da viga. No
te estudar a
to entre as d
adas.
linha neut
to fique cad
gimento da
o entanto, n
a metade da
duas faces d
38
ra possui a
da vez mais
fissura que
neste ensaio
a viga e um
da viga.
8
a
s
e
o
m
39
5 CONCLUSÃO
Os resultados obtidos mostram que a técnica de medição de deformações através
de correlação de imagens é uma ferramenta confiável para a caracterização e estudo do
comportamento dos materiais de engenharia levando em consideração a limitação do mesmo.
No ensaio de compressão, percebe-se que a precisão diminui quando a
deslocamento relativo entre as ZOI’s adjacentes está no nível subpíxel devido à aproximação
do seu procedimento de cálculo. Este problema ocorreu principalmente na análise de
deformações com baixo carregamento, ou seja, quando o material possui uma característica
aproximadamente linear. Entretanto, muitos valores foram coerentes e estavam de acordo com
valores obtidos na literatura.
O algoritmo foi bastante eficiente na detecção de regiões de fissuração tanto no
ensaio de compressão axial como na flexão. As regiões nas quais se concentravam as maiores
deformações na fase linear foram as que causaram a ruína das peças.
O método foi importante também para determinar a propagação dos
deslocamentos no caso do ensaio de compressão axial e pôde se observar claramente que os
deslocamentos eram reduzidos à medida que se distanciava da face inferior.
Em relação ao ensaio de compressão axial, a limitação importante foi o efeito
radial do corpo de prova. Quando submetido à compressão, a deformação horizontal possui
direção tangencial o que, fatalmente, cria uma componente fora do plano da imagem que não
pode ser detectado pela foto. Este efeito alterou sensivelmente o coeficiente de Poisson que
pode ser calculado com melhor eficiência através de um ensaio de compressão diametral.
Em relação ao ensaio de flexão, é importante destacar que foi analisado o
comportamento da face exposta da viga em concreto armado, partindo do princípio que ele
seja semelhante para as partes internas da seção o que não é verdade já que a ruptura da outra
face é diferente. Outra limitação importante do ensaio de flexão foi a impossibilidade de
medir a flecha máxima devido a torre de reação da prensa.
Ainda há melhorias a ser feitas no algoritmo como o aumento da precisão
subpixel, talvez utilizando outras funções de forma ou adaptando-as de acordo com o ensaio a
ser executado. Além disso, no caso da flexão, houve rotação das partículas que compõem a
viga o que para ser obter um resultado melhor exigiria uma rotação da ZOI o que não é
previsto no algoritmo.
Mesmo com as limitações, o método de correlação de imagens possui uma boa
eficiência, por exemplo, no caso das imagens obtidas no ensaio de compressão axial a
40
precisão foi de 0,1 pixel que, na escala real, é equivalente a 0,01mm. Além disso, esta
precisão pode ser ajustada com a aproximação da câmera fotográfica ao objeto em análise, o
que acarretará no aumento da relação pixel/mm, ou com aumento da resolução da máquina ou
com o aumento do tamanho da ZOI, o que despende de maior tempo para o cálculo dos
deslocamentos e melhorias menos significativas. Ou seja, diferentemente de aparelhos de
medidas convencionais, o método de correlação de imagens tem precisão ajustável por
diferentes variáveis.
O método de correlação de imagens é uma ferramenta de medição sem contato,
que não destrói o aparelho de medição, de baixo custo e, com a evolução da tecnologia das
máquinas fotográficas, tende a ser cada vez mais preciso o que pode torná-lo uma ferramenta
importante para a caracterização de materiais.
41
REFERÊNCIAS BIBLIOGRÁFICAS
ABNT – ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR 6118 – Projeto de
estruturas de concreto – Procedimento, 2003.
AREELIS. Vélocimétrie par Intercorrélation d'Images de Particules, Technopôle du
Madrillet , 2003. Disponível em : http://eric.rouland.free.fr/piv.pdf , 1 : 3.
HIBBELER, R.C. Resistência dos Materiais, 3.º Ed., Editora Livros Técnicos e
Científicos, 2000. HILD, F. Identification du comportement mécanique des materiaux et de la rupture des
structures à l’aide de méthodes optiques, 2003, Notas de Aulas IPSI – Laboratoire de
Mécanique et Technologie de l’Université de Paris – France. Disponível em:
http://www.holo3.com/UserFiles/File/Publication1_FH.pdf
MORAIS, W.A. Tensões e deformações, Universidade Santa Cecília. Disponível em:
http://cursos.unisanta.br/mecanica/ciclo8/Capitulo1-parte1.pdf
MEHTA,P.K; MONTEIRO,P. Estrutura, propriedades e materiais, São Paulo: Ed. Pini,
1994
OLIVEIRA FILHO,K, S. Mínimos Quadrados, 2009, Universidade Federal do Rio Grande
do Sul. Disponível em: http://astro.if.ufrgs.br/minq/minq.htm
42
APÊNDICE A – CONVERSOR DE IMAGENS EM ESCALA DE CINZA
O algoritmo compilado no Matlab, feito pelo professor-doutor do INSA de
Strasbourg Georg Koval, responsável pela conversão de imagens coloridas em imagens
codificadas em escala de cinza.
% programa para fazer a conversao de fotos coloridas em fotos preto e branco clear j0=126; jf=215; for j=j0:jf str=int2str(j); if j<10 I=imread(['DSC_000',str,'.jpg']); else if j<100 I=imread(['DSC_00',str,'.jpg']); else if j<1000 I=imread(['DSC_0',str,'.jpg']); else I=imread(['DSC_',str,'.jpg']); end end end J= rgb2gray(I); str=int2str(j-j0+1); if (j-j0+1)<10 imwrite(J,['Image000',str,'.JPG'],'Quality',100); else if (j-j0+1)<100 imwrite(J,['Image00',str,'.JPG'],'Quality',100); else imwrite(J,['Image0',str,'.JPG'],'Quality',100); end end end

43
APÊNDICE B – CÁLCULO DE DEFORMAÇÕES PRINCIPAIS NO MATLAB
O algoritmo compilado no Matla, feito pelo aluno Hugo Pantoja Hagmann Bentes,
responsável pela organização dos campos de deslocamentos calculados, cálculo das
deformações principais e representações gráficas das mesmas.
%Cálculo do círculo de Mohr clear %dimensões da foto L=4368; H=2912; %zona de desenho a=2000; b=1900; c=800; d=700; %Leitura do arquivo de deslocamentos load disp13.dat displ=disp13; xo=displ(:,1); yo=displ(:,2); % Determinação das imagens x=xo; y=yo; nfotos=1; fotoinicial=13; fotofinal=fotoinicial+nfotos-1; %Inicializando variaveis DX=[]; DY=[]; sizex=size(x); sizey=size(y); %sizedx=size(dx); %sizedy=size(dy); sizedx=sizex; sizedy=sizey; %Calculo da dimensão das matrizes n=1; m=1; for i=1:(sizex(1,1)-1) if (x(i+1)==x(i)) n=n+1; else n=1; m=m+1; end
44
end delta=1e-10; lx=x(n+1)-x(1); ly=y(2)-y(1); %Looping de correlação de fotos e organização de vetores for i=fotoinicial:fotofinal str=int2str(i); displ=load(['disp',str,'.dat']); dx=displ(:,3); dy=displ(:,4); DX=[DX,dx]; DY=[DY,dy]; %pe=ponto esquerdo inferior for i=1:(sizex(1,1)-n-1) pe=1+(fix((y(i)-yo(1))/ly))+(fix((x(i)-xo(1))/lx)*n); A=pe; B=pe+1; C=pe+n; D=pe+n+1; YPA=((pe-(fix((pe-delta)/n))*n-1))*ly+yo(1); XPA=(fix((pe-delta)/n))*lx+xo(1); YPB=YPA+ly; XPB=XPA; YPC=YPA; XPC=XPA+lx; YPD=YPB; XPD=XPA+lx; FMA=(1-((x(i)-XPA)/lx))*(1-((y(i)-YPA)/ly)); FMB=(1-((x(i)-XPA)/lx))*((y(i)-YPA)/ly); FMC=((x(i)-XPA)/lx)*(1-((y(i)-YPA)/ly)); FMD=((x(i)-XPA)/lx)*(((y(i)-YPA)/ly)); ux(i)=FMA*dx(A)+FMB*dx(B)+FMC*dx(C)+FMD*dx(D); uy(i)=FMA*dy(A)+FMB*dy(B)+FMC*dy(C)+FMD*dy(D); x(i)=x(i)+ux(i); y(i)=y(i)+uy(i); end end %Deformação horizontal defx dx=x-xo; dy=y-yo; for i=(n+1):(sizex(1,1)) if ((i==1)||(i>(sizex(1,1)-n))) defx(i)=0; else defx(i) = (dx(i+n)-dx(i-n))/(2*lx); end end
45
%Deformação vertical defy for i=1:(sizey(1,1)) if ((i==1)||(i>(sizey(1,1)-1))) defy(i)=0; else defy(i) = (dy(i+1)-dy(i-1))/(2*ly); end end deslocx=x-xo; deslocy=y-yo; %Cisalhamento %Matriz CisalhamI for i=1:(sizex(1,1)) if ((i<=n)||(i>(sizey(1,1)-n))) defxy(i)=0; else defxy(i) = (dx(i+1)-dx(i-1))/(2*ly); end end %Matriz CisalhamII for i=1:(sizex(1,1)) if ((i<=n)||(i>(sizey(1,1)-n))) defyx(i)=0; else defyx(i) = (dy(i+n)-dy(i-n))/(2*lx); end end Cixy=(1/2)*(defxy + defyx); %Coeficiente de Poisson sizedefx=size(defx); sizedefy=size(defy); for i=1:sizedefx(1,2) if defy(i)==0; v(i)=0; else v(i)=(abs(defx(i)))/(abs(defy(i))); end
46
end %Circulo de Mohr for i=1:sizex(1,1) Center(i)=(defx(i)+defy(i))/2; if defx(i)>defy(i) Radius(i) = sqrt(((((defx(i)-Center(i)).^2))+(Cixy(i).^2))); angle(i)=atan2(Cixy(i),defx(i)-Center(i)); else Radius(i) = sqrt(((((defy(i)-Center(i)).^2))+(Cixy(i).^2))); angle(i)=atan2(Cixy(i),defy(i)-Center(i)); end seno(i) = sin(angle(i)); cosseno(i) = cos(angle(i)); defpr1(i) = Radius(i) + Center(i); defpr2(i) = Center(i) - Radius(i); end %Reorganizando as matrizes XO=[]; YO=[]; DEFPR1=[]; DEFPR2=[]; V=[]; for i=2:sizex(1,1) if xo(i)~=xo(i-1) XO=[XO,xo(i-1)]; else XO=XO; end end XO=[XO,x(sizex(1,1))]; for i=1:n YO=[YO;yo(i)]; end i=1; j=1; sizedefpr1=size(defpr1); for k=1:sizedefpr1(1,2) DEFPR1(i,j)=defpr1(k); i=i+1; if k==j*n j=j+1; i=1; end end i=1; j=1;
47
sizedefpr2=size(defpr2); for k=1:sizedefpr2(1,2) DEFPR2(i,j)=defpr2(k); i=i+1; if k==j*n j=j+1; i=1; end end i=1; j=1; sizev=size(v); for k=1:sizev(1,2) V(i,j)=v(k); i=i+1; if k==j*n j=j+1; i=1; end end %Representação gráfica for i=1:sizex(1,1) if ((x(i)<a)||(x(i)>(L-b))||(y(i)<c)||(y(i)>(H-d))) dx(i)=0; dy(i)=0; deslocx(i)=0; deslocy(i)=0; defx(i)=0; defy(i)=0; DEFPR1(i)=0; DEFPR2(i)=0; defpr1(i)=0; defpr2(i)=0; defpr1x(i)=0; defpr1y(i)=0; defpr2x(i)=0; defpr2y(i)=0; Cixy(i)=0; v(i)=0; V(i)=0; end end figure(1) imshow('Image0020.JPG') hold on quiver(xo,H-yo,defpr1',-defpr2') hold off figure(2) surf(XO,YO,DEFPR1) view(0,90) shading interp colorbar figure(3) surf(XO,YO,DEFPR2)
48
view(0,90) shading interp colorbar figure(4) surf(XO,YO,V) view(0,90) shading interp caxis([0 0.5]) colorbar
49
APÊNDICE C – CÁLCULO DE DEFORMAÇÕES E DESLOCAMENTOS NO
MATLAB
O algoritmo compilado no Matlab, feito pelo aluno Hugo Pantoja Hagmann
Bentes, responsável para cálculo e representações de deformações e deslocamentos.
%Cálculo de deformações e deslocamentos clear %dimensões da foto L=4368; H=2912; %zona de desenho a=1500; b=1400; c=400; d=200; load disp17.dat displ=disp17; xo=displ(:,1); yo=displ(:,2); % na primeira iteraçao x=xo; y=yo; nfotos=1; fotoinicial=17; fotofinal=fotoinicial+nfotos-1; %Inicializando variaveis DX=[]; DY=[]; sizex=size(x); sizey=size(y); sizedx=sizex; sizedy=sizey; %Calculo de n, m n=1; m=1; for i=1:(sizex(1,1)-1) if (x(i+1)==x(i)) n=n+1; else n=1; m=m+1; end end delta=1e-10; lx=x(n+1)-x(1); ly=y(2)-y(1); for i=fotoinicial:fotofinal
50
str=int2str(i); displ=load(['disp',str,'.dat']); dx=displ(:,3); dy=displ(:,4); DX=[DX,dx]; DY=[DY,dy]; %pe=ponto esquerdo inferior for i=1:(sizex(1,1)-n-1) pe=1+(fix((y(i)-yo(1))/ly))+(fix((x(i)-xo(1))/lx)*n); A=pe; B=pe+1; C=pe+n; D=pe+n+1; YPA=((pe-(fix((pe-delta)/n))*n-1))*ly+yo(1); XPA=(fix((pe-delta)/n))*lx+xo(1); YPB=YPA+ly; XPB=XPA; YPC=YPA; XPC=XPA+lx; YPD=YPB; XPD=XPA+lx; FMA=(1-((x(i)-XPA)/lx))*(1-((y(i)-YPA)/ly)); FMB=(1-((x(i)-XPA)/lx))*((y(i)-YPA)/ly); FMC=((x(i)-XPA)/lx)*(1-((y(i)-YPA)/ly)); FMD=((x(i)-XPA)/lx)*(((y(i)-YPA)/ly)); ux(i)=FMA*dx(A)+FMB*dx(B)+FMC*dx(C)+FMD*dx(D); uy(i)=FMA*dy(A)+FMB*dy(B)+FMC*dy(C)+FMD*dy(D); x(i)=x(i)+ux(i); y(i)=y(i)+uy(i); end end %Deformação defx dx=x-xo; dy=y-yo; for i=(n+1):(sizex(1,1)) if ((i==1)||(i>(sizex(1,1)-n))) defx(i)=0; else defx(i) = (dx(i+n)-dx(i-n))/(2*lx); end end %Deformação defy for i=1:(sizey(1,1)) if ((i==1)||(i>(sizey(1,1)-1))) defy(i)=0; else defy(i) = (dy(i+1)-dy(i-1))/(2*ly); end
51
end deslocx=x-xo; deslocy=y-yo; %Cisalhamento for i=1:(sizex(1,1)) if ((i<=n)||(i>(sizey(1,1)-n))) defxy(i)=0; else defxy(i) = (dx(i+1)-dx(i-1))/(2*ly); end end %Matriz CisalhamII for i=1:(sizex(1,1)) if ((i<=n)||(i>(sizey(1,1)-n))) defyx(i)=0; else defyx(i) = (dy(i+n)-dy(i-n))/(2*lx); end end Cixy=(1/2)*(defxy + defyx); sizeCixy=size(Cixy); for i=1:sizex(1,1) if ((x(i)<a)||(x(i)>(L-b))||(y(i)<c)||(y(i)>(H-d))) defx(i)=0; defy(i)=0; deslocx(i)=0; deslocy(i)=0; Cixy(i)=0; dx(i)=0; dy(i)=0; end end %Reorganizando as matrizes XO=[]; CIXY=[]; DEFX=[]; DEFY=[]; for i=2:sizex(1,1) if xo(i)~=xo(i-1) XO=[XO,xo(i-1)]; else
52
XO=XO; end end XO=[XO,x(sizex(1,1))]; YO=[]; for i=1:n YO=[YO;yo(i)]; end i=1; j=1; for k=1:sizeCixy(1,2) CIXY(i,j)=Cixy(k); i=i+1; if k==j*n j=j+1; i=1; end end i=1; j=1; sizedefx=size(defx); for k=1:sizedefx(1,2) DEFX(i,j)=defx(k); i=i+1; if k==j*n j=j+1; i=1; end end i=1; j=1; sizedefy=size(defy); for k=1:sizedefy(1,2) DEFY(i,j)=defy(k); i=i+1; if k==j*n j=j+1; i=1; end end i=1; j=1; sizedeslocx=size(deslocx); for k=1:sizedeslocx(1,1) DESLOCX(i,j)=deslocx(k); i=i+1; if k==j*n j=j+1; i=1; end end i=1; j=1;
53
sizedeslocy=size(deslocy); for k=1:sizedeslocx(1,1) DESLOCY(i,j)=deslocy(k); i=i+1; if k==j*n j=j+1; i=1; end end figure(1) imshow('Image0001.JPG') hold on quiver(xo,H-yo,deslocx,-deslocy) figure(2) imshow('Image0001.JPG') hold on quiver(xo,H-yo,defx',-defy') figure(3) surf(XO,YO,CIXY) view(0,90) shading interp colorbar figure(4) surf(XO,YO,DEFX) view(0,90) shading interp colorbar figure(5) surf(XO,YO,DEFY) view(0,90) shading interp colorbar figure(6) surf(XO,YO,DESLOCX) view(0,90) shading interp colorbar figure(7) surf(XO,YO,DESLOCY) view(0,90) shading interp colorbar





























