Embed Size (px)
Citation preview

HW/SW Interface
Operating Systems Design and Implementation

Foreground/Background Systems
• Often referred to as super-loops
Background(task level)
Foreground(interrupt level)
ISR ISR
ISR
HandleAsynchronous
Events
Infinite loopcalling modules
Interruptionoccurred

Interrupt Service Routines
• Handle critical operations– can take longer than they should– make data available for background
routines• processing of such information is referred to
task-level response

Example: EFI System(Electronic Fuel Injection)
• What are the components?
Throttle Body
Air-flow meter
Injectors
ECU
Distributor sensors
Cold start solenoid
High pressure fuel pump
Water temperature sensorO2 sensor
manifold sensor

EFI System
• How does it work?– fundamentally, it manages three
necessities to start and maintain operation of a gasoline engine
• fuel• spark• air

EFI System
• What happen to the EFI system when you start a car?
• What happen to the EFI system when you drive a car?

Dissecting EFI System
• Tasks • ISRs

EFI System
• Critical section (atomic or indivisible)– any possible critical regions in our tasks?
• Mutual exclusion?
• Reentrant code?– functions can be used by multiple tasks
without causing data corruption
• Priority inversion problem?

Priority Inversion
• Assume task 3 has lower priority than task 1.– Task 1 is doing I/O so Task 3 gets to run– Task 3 is in the middle of accessing a
shared resource (obtain semaphore)– Task 1 finishes so it preempts Task 3– Task 1 wants to access the same resource
but can’t since Task 3 has the semaphore

Priority Inversion
• In this scenario, the priority of Task 1 is reduced to that of Task 3.
• What is a good solution?
Priority Inheritance
Priority Inversion
• Priority Inheritance– Task 1 is doing I/O so Task 3 gets to run– Task 3 is in the middle of accessing a shared
resource (obtain semaphore)– Task 1 finishes so it preempts Task 3– Task 1 wants to access the same resource but can’t
since Task 3 has the semaphore; thus the kernel raises the priority of Task 3 to the same as Task 1
– Task 3 gets to finish and releases the resource. The priority is reset to the original value
– Task 1 is selected if it still has the highest priority
Assigning Task Priority
• Rate monotonic scheduling– tasks with the highest rate of execution are given
the highest priority• Assume all tasks are periodic• Tasks do not synchronize with another, share resources,
and exchange data• Preemptive scheduling is used
€
E iTi
≤ n(21
n
i
∑ −1)

Assigning Task PriorityNumber of Tasks n(21/n - 1)
1 1
2 0.82
3 0.77
4 0.75
5 0.74
…
- 0.69

Providing Mutual Exclusion
• Disabling interrupt
• Test and Set operation– hardware support (TSL operation)
• Disabling scheduler
• Semaphores– how is semaphore implemented?
Disabling Interrupt
• X86– CLI (disable interrupt)– STI (enable interrupt)

Busy Waiting

Busy Waiting

Semaphore
• Is a type that has a counter and a delay queue– require OS support as processes in the
delay queue are blocked– implementation often requires other
primitive support (disabling interrupt, etc.)
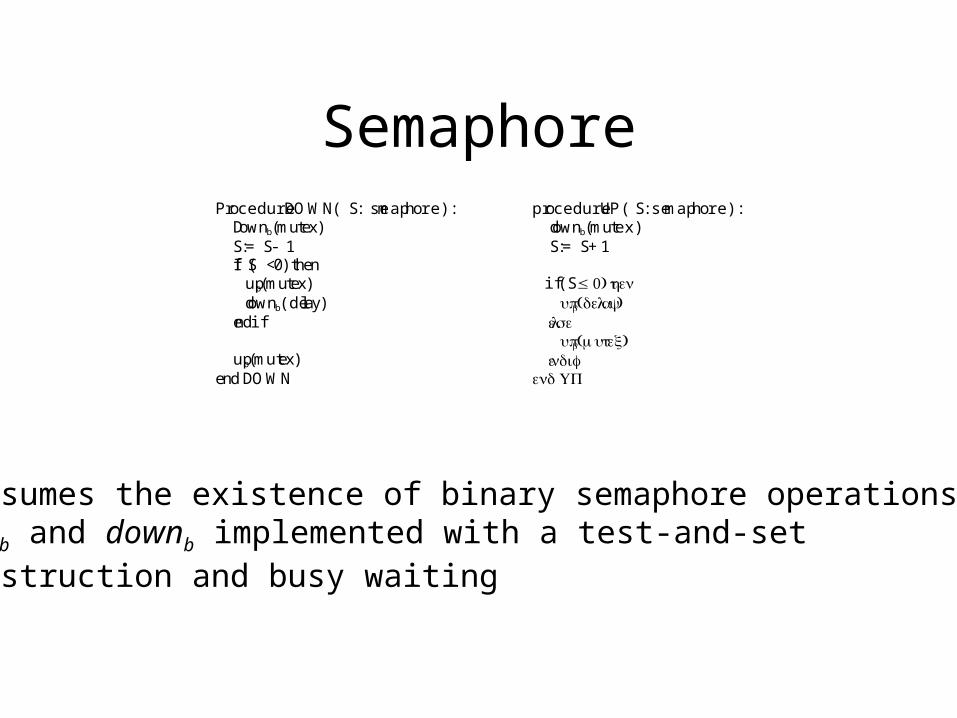
SemaphoreProcedure DOWN( S : semaphore): Downb(mutex) S := S - 1 If (S < 0) then upb(mutex) downb(delay) endif upb(mutex) end DOWN
procedure UP( S : semaphore): downb(mutex) S := S + 1 if (S ≤ 0) then upb(delay) else upb(mutex) endif end UP
assumes the existence of binary semaphore operations upb and downb implemented with a test-and-set instruction and busy waiting

Intertask Communication
• Message mailbox
• Message queues– often use to process interrupt

Interrupts
• A hardware mechanism used to notify the CPU that asynchronous events have occurred
• Upon completion, the programs return to:– background for a foreground/background system– the interrupted task for non-premptive kernel– the higest priority task ready to run for premptive
kernel

Example: Interrupt in NIOS
IE bit to enabling interruptIPRI bits for priorityMISC bits for interrupt control

Source of Exceptions (NIOS)• External Hardware interrupt Sources
– External logic for producing the 6-bits interruptnumber & asserting the IRQ input pin is automatically generated by the SOPC builder and is included in the Peripheral Bus Module (PBM).
• Internal Exception Sources– 2 sources of internal exceptions
• Register window-overflow, Register window-underflow
• Direct Software Exceptions – Software can request that control be transferred to an
exception handler by issuing a TRAP instruction.

External Hardware Interrupts• Active-high interrupt signal: irq
– Level sensitive– Sampled synchronously at the rising edge of Nios clock– Should stay asserted until the interrupt is acknowledged
by software
• 6-bit Input Interrupt Number: irq_number[5:0]– Identifies the highest priority interrupt currently requested
• Highest priority = 0 (irq #0 to #15 are reserved)• Lowest priority = 63

External Hardware Interrupts
• Nios will process the indicated exception if– IE= 1 – i.e. external interrupts & internal
exceptions are enabled, AND– The interrupt number is smaller (lower or
equal) than the IPRI field value

Internal Hardware Interrupts
Interrupt Service Routine Handler
nr_installuserisrnr_installuserisr( int trapNumber,
void *ISRProcedure, int context)
trapNumber is the exception number to be associated with a service routine
ISRProcedure is a routine which has a prototype oftypedef void (*Nios_isrhandlerproc) (int context);
context is a value that will be passed to the routine specified by isrProcedure

ISR Handler
• This routine installs an interrupt service routine for a specific exception number
• If nr_installuserisr() is used to set up the exception handler, then the exception handler can be an ordinary C routine
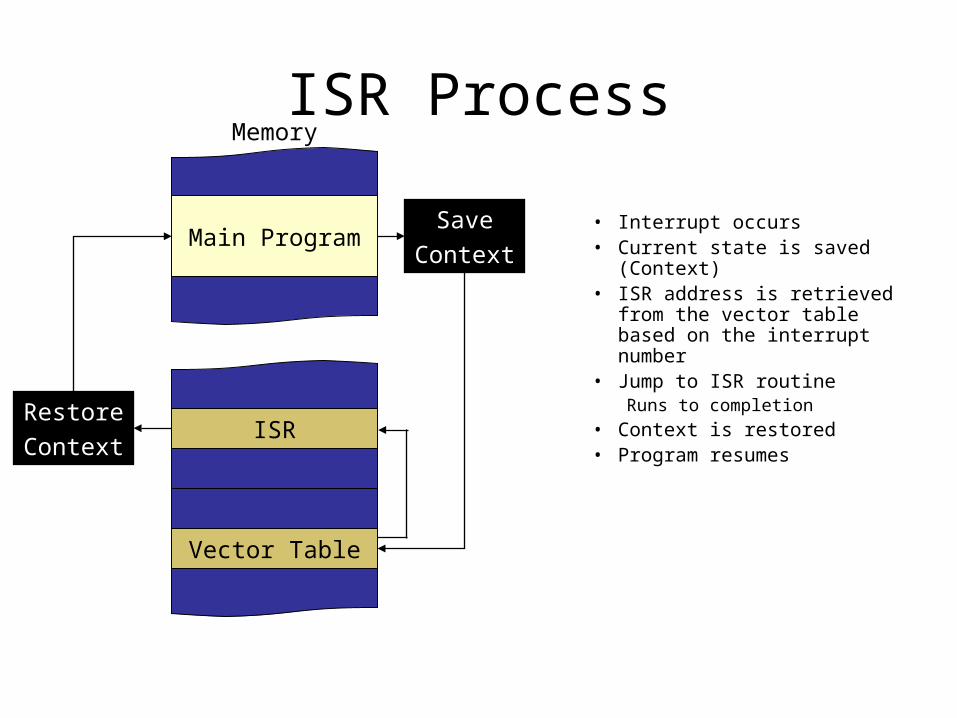
ISR Process
• Interrupt occurs• Current state is saved
(Context)• ISR address is retrieved from
the vector table based on the interrupt number
• Jump to ISR routineRuns to completion
• Context is restored• Program resumes
Memory
Vector Table
ISR
Main ProgramSave
Context
Restore
Context

ISR ImplementationSpecify your # IRQ
Declare your IRQ Declare your IRQ subroutinessubroutines
Update the ISR Update the ISR vector tablevector table
Write your IRQ Subroutine
Write your IRQ Subroutine
ROM instruction
RAM
stack
@irq_subroutine 0
…
@clock_adj_ISR
@RealTime_ISR
…
@irq_subroutine 63
Vector Table
0xFFFF
…
0xFF0F
0xFF0E
…
0xFFC0

Interrupt Example
• UART (Universal Asynchronous Receiver Transmitter)– Transferring data between processor and
I/O devices– Handle one 8-bit data at a time
• Transfer in parallel between UART and Processor and in bit-serial between I/O device and UART

JTAG UARTUsed to provide a connection between a Nios II processor and the host computer connected to the DE 2 board

JTAG UART
• Data and control registers accessed by Nios II as memory locations
# of char remaining in the read FIFO
read valid read/write data from FIFOs
read/write interrupt enable
read/write/JTAG pending
available space in write FIFO

JTAG UART
QuickTime™ and aTIFF (Uncompressed) decompressor
are needed to see this picture.

JTAG UART
• Polling vs. Interrupt





























