Embed Size (px)
Citation preview

i-limbTM digitsComponent Assembly GuidePart number MA01073: Issue 1, December 2012

2
This symbol signifies important information and is used throughout the manual.
This document provides instruction for prosthetists in the assembly of i-limb digits components necessary in the fabrication of i-limb digits prostheses. The instructions within should be read in full prior to fabrication. It is highly recommended that the use of this manual is made in conjunction with instruction from a clinician experienced in the use of i-limb digits.
Refer to www.touchbionics.com to ensure the latest copy of this document.
Part number MA01073: Issue 1, December 2012

3 of 27Part number MA01073: Issue 1, December 20122
i-limb digits Fabrication of a Five Finger Socket with Remote Electrodes
Check Socket - Silicone Socket
1 Make an initial cast of the patient’s residual hand and up to approximately mid forearm level. Mark on the cast the position of the zip if planned and the four anchors used to fix the frame to the silicone socket, two on the palmer surface and two on the dorsal surface.
N.B. the anchors on the dorsal surface should be spaced around 4cm apart to cater for the Wristband attachment dummy.
This stage of fabrication (points 1 to 9) details a method of creating a silicone socket used for the check socket. It is accepted that a number of alternative methods are possible.
2 If a zip is required then prepare by burning a series of holes with a soldering iron in the fabric on each side of the zip. This will provide improved adherence between the zip and the silicone (zip not supplied).
A ratchet strap, as well as a creative socket design maybe incorporated to aid socket suspension (contact customer service if a rachet strap is required).
3 Fill the center holes of the four anchors with clay and paint with a silicone primer.
Standard and Small Silicone Support Anchors are provided with all kit orders (091089A Silicone Support Anchor; 091117A Silicone Support Anchor, Small), alternatively Mesh Silicone Support Anchors (SA091121A) are available separately if required.
N.B. The number of anchors required will be dependent on socket design.
43

4 of 27Part number MA01073: Issue 1, December 2012
4 Shape four silicone discs, one for each anchor and silicone strip for attachment of the zip. Silicone discs should be sized slightly larger than the anchor to be used.
Experience with shore hardness between 35 to 50 has provided good results. A harder shore may provide the option for a smaller frame, and should be considered as apart of the full design process.
5 Position the silicone, anchors, zip and zip protector on the cast.
6 Roll a 2mm silicone sheet and layup on the cast to incorporate the anchors and zip.

4 of 27 5 of 27Part number MA01073: Issue 1, December 2012
7 Apply six layers of stockinette with a plastic airtight layer and vacuum for approximately 45 minutes. Remove the plastic layer and check the silicone at the mid-way stage for any irregularities.
8 Remove stockinette and trim the silicone to shape as required.
9 Cure the silicone socket at 75°C for 7 hours, or fast cure at 95°C for 2 hours.

6 of 27Part number MA01073: Issue 1, December 2012
Check Socket - FrameThis section of the guide (points 10 to 20) details a method of fabricating a frame and joining to the silicone socket to form the check socket.
10 Apply a cutting strip to the zip area and pull over a single denier stockinette.
11 Drape a rigid, clear thermoplastic frame directly on to the cast. Experience with frames of finished thickness of between 2 to 3mm has shown good results.
12 Apply vacuum and ensure a good seal to create good form to the frame shape.
13 If the patient has a small residuum, then it may be necessary to build up the cast to create a more anatomical position for the Knuckle Mounting Plate (9, 10 or 11). This can be done using plasticine to give an estimate position.

6 of 27 7 of 27Part number MA01073: Issue 1, December 2012
14 Generously grease the silicone and plasticine.
15 Duplicate using impression material.
16 Remove plasticine from the impression
17 Create a plaster cast.
18 Drape with thermoplastic in the same manner as points 11 and 12

8 of 27Part number MA01073: Issue 1, December 2012
19 Cut the frame away from the cast, shape and smooth the edges, prepare drill holes to cater for anchor screws in line with the anchors on the silicone socket.
20 Join the silicone socket and frame together with 091081A M4 Socket Button Head Screws (42), engaging with the four anchors.
N.B. The position of the electrodes or FSR’s can be marked on the transparent frame, directly from markings on the patient’s residuum, highlighting the optimal position for controls. The electrode positions are then drilled through the frame and transferred directly to the cast. The cast can then be used to position the controls on the definitive socket. Refer to point 28 for further information on electrode placement.
See Appendix for further information on the use of FSR’s.
42

8 of 27 9 of 27Part number MA01073: Issue 1, December 2012
Check Socket Digit and Wristband PositioningThis section (points 21 to 25) details the method of positioning the Wristband and digits and aeration of the socket.
15
14
Figure 7a
21 Positioning of the Remote Electrode and Socket Terminal Dummy
For fabrication, place the Remote Electrode Dummy (14) and the Socket Terminal Dummy (15) on the Dorsal surface of the residual hand (figure 1a).The position should be central to the midline of the wrist and elbow joints. A distance of 30mm should be left between the Socket Terminal Dummy and the center of the wrist joint to enable good range of movement at the wrist (figure 1b). If a dorsal interosseous myo-site is used, the Remote Electrode Dummy (14) may require repositioning. Figure 1a
14
15
16
Midline
Final position of Dual Remote Electrode Assembly
= = =
Wrist
Approx. 30mm
Optimal Wristband Assembly position
Figure 7b
Figure 7d
Figure 7c
Ultimately, the final position of the Dual Remote Electrodes (16) will match the position of the corresponding dummies (figure1c) and optimal position of the wristband (figure 1d).
Figure 1dFigure 1b
16
Midline
Final position of Dual Remote Electrode Assembly
= = =
Wrist
Approx. 30mm
Optimal Wristband Assembly position
Figure 7b
Figure 7d
Figure 7c Figure 1c
16
16
Midline
Final position of Dual Remote Electrode Assembly
= = =
Wrist
Approx. 30mm
Optimal Wristband Assembly position
Figure 7b
Figure 7d
Figure 7c
Approx 30mm

10 of 27Part number MA01073: Issue 1, December 2012
22 Select either a Multiple Knuckle Mounting Plate (10 or 11) or Single Knuckle Mounting Plate (9) (figure 2). Multiple Knuckle Mounting Plates can be cut to cater for patients with 3 or 2 finger loss.
3
2
1
Figure 1
23 Removal of the Knuckle Fairing Remove the two M2 x 9mm Torx Screws (1) from the
Knuckle Fairing (2) using the T6 Screwdriver (3).
Remove Knuckle Fairing (2) by sliding the fairing away from the joint.
(Figure 3)
Figure 3
Figure 2
1
2
10 11 9
3
7
4
5 6
Figure 2
24 Removal of the Digit from the Knuckle Use the T8 Screwdriver (4) to remove the M2 Digit Screw
(5) from the Knuckle Assembly (6).
The Digit (7) can now be freely disengaged from the Knuckle Assembly (6).
(Figure 4)
Figure 4
4
56
7

10 of 27 11 of 27Part number MA01073: Issue 1, December 2012
7
6
5 4
Figure 4
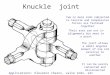
25 Attachment of the Knuckle Mounting Plate
Use the T6 Screwdriver (3) to attach the Knuckle Assembly (6) to either a Single Knuckle Mounting Plate (9) or a Multiple Knuckle Mounting Plate (10 or 11) using three M2 x 6mm Torx Screws (8).
Lamination tabs can be bent or shortened as appropriate at this stage. The single hole on the Single Knuckle Mounting Plate faces the dorsum of the hand when in the correct position.
Consider fabrication before cutting and removing tabs, some tab length will be needed for fixation of the plate to the frame.
(Figure 5)
26 Attachment of the Digit to the Knuckle Assembly
Firmly place the digit (7) into the Knuckle Assembly (6).
Insert the M2 Digit Screw (5) using the T8 Screwdriver (4).
(Figure 6)
10
11
9
3
8
6
Figure 3 Figure 5
Figure 6
3
8
6
9
1110
6
7
4 5
Take care not to over tighten screws.

12 of 27Part number MA01073: Issue 1, December 2012
Ground Contact (Middle)
Connects to Wrist Band Loom
Contact Set 1
Contact set 2
16
Figure 8b
Contact
Ground Contact
Adjustment dial
Figure 8a
27 Remote Electrode Wiring Map The Dual Remote Electrode Assembly (16) is arranged
with a single Ground position and two electrode contact points for each electrode (figure 7b).
Optimal setting for the Adjustment dial is 4.
(Figure7a)Figure 7a
Figure 7b
16
Ground Contact (Middle)
Connects to Wrist Band Loom
Contact Set 1
Contact set 2
16
Figure 8b
28 Position of the Remote Electrode Domes
Identify potential electrode sites (figure 8a). Create a clear thermoplastic check socket over the patient’s positive cast ensuring coverage of the proposed electrode dome sites (figure 8b).
Potential electrode sites Figure 9a Figure 8a

12 of 27 13 of 27Part number MA01073: Issue 1, December 2012
Ø3.2
10mm
10mm
10mm
10mm
10mm
10mm
Figure 9c
Figure 9b
Drill a 5 x 3 matrix of Ø3.2mm holes at a distance of 8 to 10mm apart in the check socket, over the potential sites (figure 8c).
Figure 8b
Figure 8c
10mm
10mm
mm
10mm 10mm 10mm 10mm
Ground Dome Position
Dorsum View Figure 10
29 Position of Ground Electrode Dome Both of the Ground Contact wires, the middle wire from
the Remote Electrode Assemblies, use the same dome.
Drill a Ø3.2mm hole beneath the position of the Socket Terminal, in the midline (figure 9).
If this position is unavailable, select an alternative position away from muscle sites over bone and distal to the wrist.
Figure 9

14 of 27Part number MA01073: Issue 1, December 2012
30 Insertion and Connection of Electrode Domes
Insert an electrode dome (21) into the Ground Dome Position and connect the middle wire from each Dual Remote Electrode (16) using the washers and locking nut (17, 18, 19, 20, 21) provided (figure 10a).
Insert two domes into two of the holes previously drilled, per electrode site. Connect the contact wires from one electrode to each pair of domes (figure 10b), connecting the M3 Nut (17), Electrode Eye (18) and Conical Washer (19) as illustrated in Figure 10a.
It is important to have one hole between electrodes and ensure electrodes run in series with the muscle fibers (figure 10b and 10c).
21
19
18
17
20
Figure 11a
CORRECT
Electrode domes are in line with the muscle fibers and one hole separates domes Figure 11c
INCORRECT
In general the above Dome arrangements are not op2mal for EMG signals. Figure 11d
Figure 10a
Figure 10b
Figure 10c
17
18
19
20
21

14 of 27 15 of 27Part number MA01073: Issue 1, December 2012
N.B. It may take a number of attempts to find the optimal position for digits. Positioning should be based on function rather than anatomical position. Test the prosthesis on the patient, considering compensatory movements at the elbow and shoulder; in addition to movements in all planes as well as rotational movements. Assessment should use a variety of different objects and tasks, checking all grip options.
31 Fit the patient with the check socket and connect to biosim. Analyze Fit the patient with the check socket and connect to biosim. Analyze. Analyze muscle signals. If required reposition domes
using predrilled holes to obtain optimal outputs.
32 Testing for Optimal Digit Positioning and Socket Aeration
Glue the digit mount to the test socket using fast set urethane adhesive. Glue thumb position to provide the best opposition to the Index and Middle digits. Thumb Setting Bar (25) may be used to aid alignment.
33 Aerate the socket as required cutting apertures into the silicone socket and frame, ensure that all wiring is adequately protected within the socket and edges are smoothed. Users may find aeration preferable as it will increase sensation while decreasing weight, heat build up and associated sweating.
N.B. During the fitting process the position of electrodes and wiring routes are established.

16 of 27Part number MA01073: Issue 1, December 2012
28
29
Figure 14b
Insert the Alignment Bars (28) into the Single Knuckle Dummies (27) and lock each in place using M2 x 5mm Countersunk Torx Screw (29) and the T6 Screwdriver (use one per digit when using Single Knuckle Mounting Plates (9) and a minimum of two per assembly for Multiple Knuckle Mounting Plates), (figure 11b).
Figure 11b
28
27
29
Transfer of Alignment
3
26
27
Figure 14a
35 Transfer of Digit Alignment with Thumb Rotator Assembly from Check Socket
Remove the Digits (7), Knuckle Assemblies (6) and Thumb Setting Bars (22 or 23) from the check socket. Attach the Single Knuckle Dummies (27) to the Knuckle Mounting Plate (9, 10 or 11) using three M2 x 12mm Countersunk Torx Screw (26) and the T6 Screwdriver (3), (figure 11a).
Figure 11a
3
26
27
Definitive Socket
34 Fabricate the definitive silicone socket as per the process for the check socket with added pigment (stages 1 to 8).

16 of 27 17 of 27Part number MA01073: Issue 1, December 2012
36 Position the check socket on the original cast and mount in a vertical alignment jig. Capture alignment in lower container with impression material or plaster and allow to cure.
37 Remove the cast from the vertical alignment jig and then remove the check socket from the cast. Replace with the definitive silicone socket and reposition on the vertical alignment jig, whilst protecting the silicone with cling film. The definitive socket and the Knuckle Mounting Plate will now be accurately positioned with a space in between.
38 Fill the space between knuckle and silicone with clay.
N.B. Consideration must be given to the position of the electrical connectors for supply of power to each individual digit. If space is available between the silicone socket and the frame then place the connection points for each digit within this space. If space is limited then an additional area must be build up with plasticine to provide additional space within the frame.

18 of 27Part number MA01073: Issue 1, December 2012
39 Remove from the vertical jig and set upright. Place the the dummies for the Wristband connection and remote electrodes on the back of the hand. Blend in the contours of the connection using clay.
40 Create routes for the wiring using clay or similar material.
41 Remove the Knuckle Mounting Plate(s) (9, 10 or 11).
42 Using silicone impression material duplicate the model to make a plaster mould, as per points 15 to 17.
43 Laminate the plaster with two layers of Nyglass.

18 of 27 19 of 27Part number MA01073: Issue 1, December 2012
Figure 15b
Figure 15a
44 Transfer of Digits Alignment with Thumb Rotator for the Definitive Socket
The inner Silicone and primary lamination will have been completed at this stage.
Transfer to the Definitive Socket using the chosen method (also refer to the Alignment Section in the Fabrication guide).
Assemble the second set of Mounting Plates to the Dummy components and fix to the Definitive Inner Socket accordingly. Ensuring the Alignment bars are held in position during the process (figure 12a).
Remove the Dummy components (figure 12b).
Figure 12a
Figure 12b
Re-attach the Thumb Setting Bar (22 or 23) with the with the Thumb Mounting Plate (25) attached (figure 12c).
Figure 15c Figure 12c
23
25
22

20 of 27Part number MA01073: Issue 1, December 2012
Fix the Thumb Mounting Plate (25) in position using an appropriate adhesive and remove the Thumb Setting Bar (22 or 23). Alignment has been transferred (figure 12d).
Figure 15d Figure 12d
45 Fabrication Preparation and Dummy Component Assembly
Once final alignment checks have been carried out, remove all digits and re-assemble the Fabrication Dummy components and position the Thumb Mounting Dummy (32).
Use clay to fill the screw heads and any other gaps to ensure no resin seepage (figure 13).
32
Figure 16 Figure 13
32

20 of 27 21 of 27Part number MA01073: Issue 1, December 2012
46 Layup the model with two layers of woven glass, apply a PVA bag and laminate.
48 Remove the lamination blocks and grind down further to the surface of the Knuckle Mounting Plate (9, 10 or 11). Clean up around the Thumb Mounting Plate (25) to allow the assembly of the thumb.
49 Remove the cast from the frame. Trim the frame as desired and create apertures as per the check socket. Aeration of the socket is desirable to enhance sensitivity and to reduce heat build up and associated sweating.
Aeration of the dorsal aspect of the frame is not recommended. Ensure that aeration does not compromise the strength of the frame.
47 When the lamination is fully cured grind down to reveal the lamination blocks.

22 of 27Part number MA01073: Issue 1, December 2012
51 The hole in the right hand side of each knuckle must be cleared of debris to accept the wire from the Knuckle Assembly (6).
52 Attach Knuckle Assembly (6) using M2 x 6mm Torx Screws (8), three screws are needed per Knuckle Assembly.
50 Drill a hole at the Thumb Mounting Plate (25) in the frame to allow digit wire to pass through, as per image.
AssemblyThis section details the assembly of the definitive prosthesis (points 51 to 59).

22 of 27 23 of 27Part number MA01073: Issue 1, December 2012
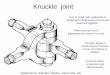
53 Attach the Thumb Hinge Plate (41) to the Thumb Rotator Assembly (34 or 35).
55 Attach each digit using the supplied screws. Screws are recommended to be single use.
56 Attach the remote electrode to the silicone socket as per the method used for the check socket.
N.B. The black earth wire is positioned on the dorsal surface of the hand, the red wire attached to signal site positions.
54 Thumb Rotator Assembly – Setting and Assembly
The full Thumb Rotator Assembly is illustrated (34 or 35) (Figure 14a). To increase the force required to rotate the thumb, remove the Nut Cap (36) and use the 8mm Spanner (33) to tighten the Self Locking Nut (35) to tighten the M4 Locking Nut (37).
Hand tighten with fingers and then turn a further 120 to 150° to give the desired Thumb Friction depending on patient preferences (figure 14b), using the 8mm Spanner (33).
Ensure the Clutch Plate (39) is not contaminated, as this will affect performance.
402
39
35
34
36
Figure 17a
35
33
36
35
Figure 17b Figure 14b Figure 14a
33
3725
36
37
5
6
41
38
39
40
34
35

24 of 27Part number MA01073: Issue 1, December 2012
57 Attach the Wristband and secure using 091081A M4 Socket Button Head (42).
58 Connect the digit wires to each two-way connector from the Wristband.
59 Connect the four-way connector to the remote electrode.
60 Insert the silicone socket into the frame and attach using 09181A M4 Socket Button Head Screws (42).
N.B. The order of attachment is un-important as this is later mapped using the biosim software (see the biosim section in the i-limb digits Clinician Manual for full details).
N.B. The connection plugs between each digit and the Wristband, along with any excess wiring, should be positioned between the silicone socket and the frame, beneath the base of the Knuckle Mounting Plate.
42
61 i-limb digits Skin Active covers Slide the i-limb digits Skin Active and i-limb digits Thumb
Skin Active coverings (30 and 31) in place over the digits (figure 15a), aligning the contours of the covers with the digit (figure 15b).
Figure 18a
30
31
Figure 18b Figure 15b Figure 15a
31
30

24 of 27 25 of 27Part number MA01073: Issue 1, December 2012
63 FSR Control When using FSR control, the head of the FSR must not be distorted as failure of the device is likely to occur.
The FSR is sited between the silicone socket and the frame (a second light weight inner frame may be created to support the FSR and protect the wiring).
The silicone socket should be a maximum of 1mm thick, 20 shore silicone in the region of the head of the FSR for ease of activation.
Routing of wires and fixing points are then established and incorporated within the silicone socket.
A flat area must be created within the frame to cater for the head of each FSR. This can be done by taking a cast of the silicone socket mounted on the cast. The cast is then poured to create a positive model. A flat area is then made at the site of the FSR using a plastic disc which is blended into the cast. This ensures a flat surface for the FSR.
Appendix
62 Removal of Transport Bracket (for replacement of digits only)
Remove the O-Ring (12) from the rear of the M2 Digit Screw (5).
Withdraw the M2 Digit Screw (5) from Digit (7) and the Transport Bracket (13).
Retain parts for future return to service center.
(Figure 16)
7
12
13
5
Figure 6 Figure 16
12
7
13
5

26 of 27Part number MA01073: Issue 1, December 2012
64 List of i-limb digits Components
Item Part Number Description
1 069185A M2 x 9mm Torx Screw
2 069176A Knuckle Fairing
3 069292A T6 Screwdriver
4 069293A T8 Screwdriver
5 069180A M2 Digit Screw
6 SA069389A Knuckle Assembly
7 Various* Digit
8 069435A M2 x 6mm Torx Screw
9 SA069366A Single Knuckle Mounting Plate
10 SA069405A Multiple Knuckle Mounting Plate, LHS
11 SA069406A Multiple Knuckle Mounting Plate, RHS
12 069408A O-Ring
13 069385A Transport Bracket
14 069409A Remote Electrode Dummy
15 069361A Socket Terminal Dummy
16 SA069416A Dual Remote Electrode
17 901018A M3 Nut
18 NA** Electrode Eyelet
19 069308A Conical Washer
20 091120A Electrode Dome Spacer
21 091119A Electrode Dome
22 069077A Thumb Setting Bar, LHS
Item Part Number Description
23 069076A Thumb Setting Bar, RHS
24 Various* Thumb
25 069277A Thumb Mounting Plate
26 069402A M2 x 12mm Countersunk Torx Screw
27 069219B Single Knuckle Dummy
28 069400A Digit Alignment bar
29 069401A M2 x 5mm Countersunk Torx Screw
30 Various* i-limb digit Thumb Skin Active
31 Various* i-limb digit Thumb Skin Active
32 069455A Thumb Mounting Dummy
33 000049A 8mm Spanner
34 PL069250B Thumb Rotator Assembly, RHS
35 PL069087A Thumb Rotator Assembly, LHS
36 069294A Nut Cap
37 1900010A M4 Locking Nut
38 069231A Thumb Spring
39 069252A Clutch Plate
40 069228A Thumb Spigot
41 069234A Thumb Hinge Plate
42 091081A M4 Socket Button Head Screw
43 091089A Silicone Support Anchor
44 091081A Silicone Support Anchor, Small
*Depending on digit size**Comes as part of a set, does not have an individual product code

26 of 27
Item Part Number Description
North American Customers(Canada, Mexico & US)
Touch Bionics35 Hampden Road
Mansfield MA 02048USA
Tel: +1 855 MY iLIMB (694 5462)
International CustomersTouch Bionics
Unit 3, Ashwood CourtOakbank Park Way
Livingston EH53 0THScotland
Tel: +44 1506 438 556Email: [email protected]
For address details and further information please visit www.touchbionics.com
Third party products and brand names may be trademarks or registered
trademarks of their respective owners
© Copyright 2012 Touch Bionics Inc. and Touch EMAS Ltd. All rights reserved.
Issue No. 1, December 2012 Part number: MA01073