Upload
ilg1
View
213
Download
0
Tags:
Embed Size (px)
DESCRIPTION
fuzzy
Citation preview
Genetic algorithms for fuzzy control Part 1 : Offline system development and application
define fuzzification and defuzzif icot ion scaling factors
D.A. Linkens H.O. Nyongesa
tune rules. scaling factors and membership to achieve performonce levels
Indexing terms: Adaptive control systems, Biomedical control, Evolutionary adaptation, Furzy logic control, Genetic algorithms, Machine learning
Abstract: Although fuzzy logic controllers and expert systems have been successfully applied in many complex industrial processes, they experi- ence a deficiency in knowledge acquisition and rely to a great extent on empirical and heuristic knowledge which, in many cases, cannot be objec- tively elicited. Among the problems to be resolved in fuzzy controller design are the determination of the linguistic state space, definition of the mem- bership functions of each linguistic term and the derivation of the control rules. Some of these problems can be solved by application of machine learning. First, it is desirable to simplify and automate the specification of linguistic rules. Sec- ondly, it is also desirable that modification of control rules is possible in order to cope with pre- viously unknown or changes in process dynamics. Machine learning methods have, in recent years, emerged from the use of learning algorithms mod- elled on natural and biological systems. These methods attempt to abstract the advanced mecha- nisms of learning exhibited by such systems, which can, consequently, be applied to intelligent control. One of these new algorithms is the genetic algorithm which is modelled on the processes of natural evolution. The paper develops the applica- tion of genetic algorithm techniques for fuzzy con- troller design. Genetic algorithms are used to automate and introduce objective criteria in defin- ing fuzzy controller parameters.
1 introduction
Several studies have shown fuzzy logic control to be an appropriate method for the control of complex contin- uous unidentified or partially identified processes [ 1-33, many of which cannot easily be modelled in a mathe- matical way. This is because, unlike a conventional process controller such as a PID controller, no rigorous mathematical model is required to design a good fuzzy controller and in many cases they can also be implement- ed more easily. However, this simplicity with which they can be implemented also presents a bottleneck in their design. Fuzzy controllers rely on heuristic knowledge that is subject to the designers interpretation and choice.
Q IEE, 1995 Paper 1766D (C8). received 10th March 1994 The authors are with the Department of Automatic Control and Systems Engineering, University of Shefield, PO Box 600 Mappin Street, Shefield SI 4DU, United Kingdom
IEE Proc.-Control Theory Appl., Vol. 142, N o . 3, May 1995
There is to-date no generalised method for the formula- tion of fuzzy control strategies, and design remains an ad hoc trial and error exercise.
This paper discusses a new, objective approach to the design of fuzzy controllers. The approach uses genetic algorithms, a recent search and optimisation technique [4, 51, to optimise the parameters of a fuzzy controller. A similar approach was recently reported in References 6 and 7 in which the method was used for the optimisation of the membership functions of a fuzzy control rule-base. The present study, however, extends the method to the complete process of design of a multivariable controller for a nonlinear biomedical process, namely, control of anaesthesia.
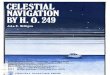
2.1 Fuzzy design methodology A typical design methodology for fuzzy controllers usually follows the iterative steps shown in Fig. 1 [SI. I t is noted
define an operational ]model of the Drocess 1
Simulate process
cesign
Fig. 1 Fuzzy design methodology
that the first step in the fuzzy design procedure is to obtain an understanding of the process dynamics. This is necessary because, as is the case with other types of con- trollers, it is not possible to design a controller without assuming certain characteristics about its environment. However, in the case of fuzzy controllers this requires a less rigorous model of the process that may be expressed merely as estimates of the gain sensitivity, the system delays and an estimate of the order of the system.
161
The second stage of the design process is to define the boundaries of the fuzzy universe of discourse and the number of partitions within it. Most studies have used universes of discourse utilising fuzzified units that range from +6 to + 10, and partitions of between 3 and 9 fuzzy sets [9-111. In addition, the universes may be discrete or continuous functions. Modification of a fuzzy universe of discourse and its partitions alters the control surface and thus can be used as a means of tuning the controller. On the one hand it has been argued, by Daley and Gill [9], that an even number of partitions should be used because this provides control adjustment on either side of the set- point to achieve a zero mean steady state error. On the other hand, Cox [SI suggested that an odd number of partitions should generally be used. Either of these points of view, however, have not been strongly supported by other published studies. The genetic algorithm technique, applied in this study, uses binary coded strings which naturally suggests an even number of coded parameters.
After specifying the fuzzy universe and the partitions therein, the membership functions of the fuzzy sets can then be defined. The shapes of membership functions used in most studies are continuous triangular, or gauss- ian functions, although discretely defined functions have also been used in other studies [9, 1 1 , 123. Gaussian func- tions are considered suitable when the controller rule- base has very few rules [13], since the function has nonzero membership grades over the whole fuzzy uni- verse. However, when the number of rules is large, gauss- ian functions result in the firing of several rules, some of which may be antagonistic. In this case, it is necessary to limit the number of rules which fire by defining a mem- bership cut-off level, cc-cut. Membership functions used in the present study are continuous triangular functions. Triangular membership functions are simpler to use since i t is only necessary to specify where the peaks of fuzzy sets are located in the universe, and how wide are the fuzzy sets. It is also generally agreed that a certain amount of overlap of the fuzzy sets is desirable to provide continuous and smooth transitions on the control surface [14]. However, since the fuzzy controller is nonlinear the amount of overlap and positioning of the fuzzy sets is much dependent on the process under consideration, and hence subject to tuning and modification, in order to obtain the required performance.
The third stage in the design process is to decide a fuzzification and defuzzification strategy, to convert real measurements and data to the fuzzy domain and vice versa. Fuzzification and defuzzification can be viewed, in a simplified way, as choosing scaling factors for each of the predicates of a fuzzy relation. This step is critical in the design process because the scaling factors have a very profound effect on the other parameters of the fuzzy con- troller 1151. In fact, it is usually easier to find a good set of sensible rules and membership functions to apply as a starting point in an iterative design scheme, than to find appropriate scale factors. In the fourth and final stage, the control rules are derived. This is the set of IF ... THEN . . . linguistic relations that form the expert know- ledge of the controller. The traditional method of obtain- ing these rules is a heuristic trial-and-error approach based on analysing process behaviour, and consequent iterative modification to obtain acceptable performance.
2.2 Problems in fuzzy design Although they have been applied in many complex indus- trial processes, fuzzy logic controllers and expert systems experience a deficiency in knowledge acquisition, and rely
I62
to a great extent on empirical and heuristic knowledge which in many cases cannot be elicited objectively. Among the problems to be resolved in fuzzy design are the determination of the linguistic state space, definition of the membership grades of each linguistic term and the derivation of the control rules. The traditional methods through which this sort of information has been gathered include interviews with experienced process operators, process knowledge experts, or other sources of domain knowledge and theory. More recently, fuzzy modelling techniques have been studied by Cellier and Alvarez [16] and Linkens and Shieh [17].
The traditional approach to fuzzy design, as outlined above, is laborious, time consuming and in most cases specific to each application. Other shortcomings that result from the approach include the following:
(i) Process operators usually cannot easily translate their knowledge and experience into an algorithmic or rule-based form necessary for conversion to an automatic control strategy.
(ii) The expert knowledge is not always available. (iii) Multivariable fuzzy control remains very difficult
in terms of eliciting the rule-base.
2.3 Learning in fuzzy controller design Some of the problems encountered in fuzzy design can be solved by application of machine learning, and in partic- ular the use of genetic algorithms. First, it i s desirable to simplify and automate the specification of linguistic rules, their membership functions, and the scaling factors. Sec- ondly, it is also desirable that modification of control rules or their membership functions be possible in order to cope with previously unknown or changes in process dynamics. This would also mean, for example, that knowledge-bases can be applied more generally, only requiting adjustments to either the rules, membership functions or scaling factors in order to be suited to a dif- ferent control problem.
The choice of a learning method depends on the nature of the task domain and the available information. Two types of learning methods have hitherto been used to generate rules, depending on the available information. If sufficient input/output data can be obtained then inductive learning methods [16, 181 can be used. On the other hand, if extensive domain theory or sources of expert behaviour exist then explanation based methods are applied [19]. There are however, situations in which neither of the above information is available. One method of developing rules in such cases involves testing hypothetical trials on a model of the task, or indeed the actual task itself if it can tolerate trials. Better trials can then be evolved based on assessment of previous results. Thus, two learning approaches can be envisaged, ofiline learning when a simulation model is available and online learning, when no suitable model can be obtained. This paper considers the offline learning technique, using a genetic algorithm as the learning medium. The online approach is discussed in Part I1 of this paper. In both approaches the genetic algorithm is applied to automate and introduce objective criteria in defining fuzzy control- ler parameters. In previous studies, Karr el al. [SI, Karr [20] and Thrift [21], used the offline techique to derive membership functions for predefined sets of rules. In the present study, the genetic learning method i s extended to the complete process of fuzzy design, as outlined in Fig. 1, which includes elicitation of control rules and opti- misation of their membership functions. Furthermore, the genetic algorithm method is able to derive the fuzzy
IEE Proc.-Control Theory Appl., Vol. I42, No. 3, May I995
knowledge-base without following the step-by-step iter- ative process.
The incorporation of genetic learning into a fuzzy design process adds an intelligent dimension to the fuzzy controller enabling it to create and modify its rules. Genetic algorithms give the possibility of adjusting mem- bership functions down to the level of individual rules. This is unlike usual fuzzy knowledge-based systems in which the arguments of rules are constants or variables that have been previously bounded, and which retain these bounds whenever the rules are used. Using a genetic algorithm, the rules can be allowed to develop new bounds for their individual predicates, such that the same variable may have different bounds in another rule at the same time. or in the same rule at a different time.
3.1 An overview of genetic algorithms Genetic algorithms (GA) are exploratory search and opti- misation procedures that were devised on the principles of natural evolution and population genetics. The basic concepts of GA were developed by Holland [22,23], and subsequently in several research studies. Goldberg [5] and Davis [4] provide recent comprehensive overviews and introductions to GA.
There are several differences between the functioning of C A and traditional optimisation techniques, especially those based on gradient methods. These differences include the following:
(i) GA work on a coding of the parameters to be opti- mised, rather than the parameters themselves. Binary coding is normally used and has been suggested to be optimal in certain cases, however this is neither a restriction nor a requirement of GA.
(ii) GA search a space using a population of trials, representing possible solutions to the problem. The initial population, usually, consists of randomly generated individuals.
(iii) GA use an objective function assessment, to guide the search of the problem space.
(iv) GA use probabilistic rules to make decisions.
Typically, the GA starts with little or no knowledge of the correct solution depending entirely on responses from an interacting environment and its evolution operators to arrive at good solutions. By dealing with several indepen- dent points the GA samples the search space in parallel, and hence is less susceptible to getting trapped on sub- optimal solutions. In this way, GA have been shown to be capable of locating high performance areas in complex domains without experiencing problems with high dimensionality, or false peaks, as would occur with hill climbing optimisation techniques.
As has been stated, GA imitate natural evolution, and hence include operations such as reproduction, cross- over, mutation and inversion. A simple GA has four features; Population size, Reproduction, Crossover, and Mutation. Reproduction is a process in which a new gen- eration of population is formed by randomly selecting strings from an existing population, according to their fitness. This process results in individuals with higher fitness values obtaining one or more copies in the next generation, while low fitness individuals may have none; it is for this reason called a survival of the fittest test. Crossover is the most dominant operator in a CA, and is responsible for producing new trial solutions. Under this operation, two strings are selected to produce new off- spring by exchanging portions of their structures. The offspring may then replace weaker individuals in the
I E E Proc.-Control Theory Appl., Vol. 142, N o . 3, M a y 1995
population. Mutation is a local operator, which is applied with a very low probability of occurrence, typically 0.001 per bit or less. Its function is to alter the value of a random position in a gene-string. When used in this way, together with reproduction and crossover operators, mutation acts as an insurance against total loss of any gene in a particular position throughout the population, using its ability to introduce a gene which may not, initially, have existed due to limited population size or was lost through application of the other operators. For a given population of trials and set of operators together with procedures for evaluating each trial, a GA proceeds as follows:
(a) An initial random population of trials. n(0) = A,(O), rn = 1, ..., M , where M is the number of trials in the population, is generated.
(b) For successive sample instances:
2, . . . , is evaluated and stored
sample of n(T) using the probability distribution
(i) The performance of each trial, p(A,,,(T)). T = 0, 1,
(ii) One or more trials are selected by taking a
l h f
(iii) One or more genetic operators is applied to the selected trials in order to produce new offspring, Ai(T) , m = 1, ..., N , where N is the number of off- spring which is usually equal to the number of selected trials (parents).
(iv) The next generation of population, IIl T + 1) is formed by selecting AAT) E n(T), j = 1, . . . , N to be replaced by the offspring, AJT) . The criterion for selecting which trials should be replaced may be random, on the basis of the least fit or some other fitness basis. (c) The GA process is terminated after a prespecified
number of generations or on the basis of a criterion which determines convergence of the population.
One of the attractions for researchers in C A as a search and optimisation technique was that it could obtain near-optimal solutions to different types of problem without knowledge of their specific task domain, by simply manipulating bit strings. GA were in most of these cases applied to function optimisation over real R object spaces. However, it was soon noted that the choice of a number of control parameters and even the representa- tion itself could severely affect the performance of the GA, when applied to other types of problems. Running a successful C A involves having to find settings for a number of control parameters, which is not a trivial task. The control parameters include: population size, and the nature and rates of the recombination operators; cross- over, mutation and reproduction. A number of studies have investigated the selection of these parameters, and there have been attempts to overcome the representation difficulties by taking advantage of any available a priori knowledge about the task problem, together with the design of specialised coding and genetic operators. Repre- sentation issues have been studied by Antonisse and Keller [24], Caruana and Schaffer [25] and more recent- ly by Schraudolph and Belew [26] who investigated online dynamic encoding of parameters. Grefenstette [27], Davis [28], Schaffer et al. [29], among others, have studied control of the parameters of a GA. Indeed, it has been demonstrated in many studies that a specially adapted GA will outperform other GAS on a specific problem. Specialised genetic plans are derived by control-
I63
ling the rates of the tripartite processes; reproduction, crossover and mutation.
In learning applications, as opposed to function opti- misation, one is not necessarily interested in finding optimal solutions to problems. This is partly because the global optimal solution is not even known. In such cases, the CA is used as a learning heuristic that finds good knowledge structures quickly, and which may or may not be optimal [30]. This is the course followed in this study, that is, to find a C A that derives knowledge-bases for satisfactory fuzzy control, as quickly as possible. To improve the performance of a GA there is always a need to maintain a balance between exploration and exploit- ation of the search space. Exploration is related to the number of new trials carried out, while exploitation is related to the number of good candidates retained in a population to produce better trials. An appropriate selec- tion of the various genetic operators forms a suitable genetic or evolution plan.
rule 1
3.2 Genetic algorithm for fuzzy controller design A genetic adaptive plan can be defined as a quadruple A = {Z, nN, @, R}, where Z is the coding format, nN is a population of size N , @ is a fitness rescaling algorithm and R = [U,, 02, . . ., U,] is the set of genetic operators. In this research, three CA operators are used: repro- duction U,, crossover w, and mutation om. By genetic plan is meant the processes through which successive populations are generated using evaluation, selection, mating and deletion. Let Y be a probability distribution over II which is derived from the fitness of each trial, p(A E n). A genetic plan can then be formally expressed as the mapping A: (Y x n x Q) + W. This paper investi- gates the efficacy of some of the more common GA adaptive techniques, with a view to deriving a genetic plan suited for fuzzy learning.
rule 8
3.2.1 Coding the genetic algorithm: The type of coding used in this research is the classical concatenated binary mapping. This coding joins together segment codes of all parameters into one composite string. Let the code of the ith parameter in the n-dimensional 9 search space be designated U,. When the usual binary alphabet is used U is an [,-tuple string of Is and Os; ui++ {0, 1}li, where Ii is the length of the code. Thus, each trial structure using concatenated binary mapping is given by
A En = ,y ui = [d, U* , . . ., U] The structure of a fuzzy rule is made up of the codings of the fuzzy sets of the linguistic predicates of the rule. Fur- thermore, a linguistic variable is defined by its member- ship function which, in the case of the chosen triangular shape, is determined by the position of its peak and the spread of its nonzero grades. Therefore, typically, each linguistic fuzzy variable can be represented by three part- codes; one for its linguistic value (or name) l, one for the position of the peak p and the third for the width of the set w
CUI up (3) Considering a fuzzy rule with n conditions and rn actions the composite coding for a trial rule, A E n is given by
(4) where U;, or U;. are the codes of the ith condition or action fuzzy sets.
A = . . . uF, U:. . . urn]
164
Fig. 2 illustrates a typical coding format for a popu- lation of fuzzy rule-bases comprising two conditions E and CE, and one action U. This is the structure of rules adopted in many fuzzy control applications, where E
I I I 1 I I I I I
1 I I I I I I I I I
I
31-29 28-24 23-M 19-15 14-11 10-6 5-2 1 Fig. 2 A typrcal coding offuzzy-rule base
represents the control error, C E the change-in-error and U the process control input. In this work, it was decided to contain the coding of a fuzzy rule within the basic data structure of the particular computer hardware used, which is 32 bits. This simplifies the manipulation of the codes. Eight linguistic fuzzy sets, namely [Negative Big. NB, Negative Medium N M , Negative Small NS, Nega- tive Zero NZ, Positive Zero PZ, Positive Small PS, Posi- tive Medium PM, Positive Big P E } , were specified for either of the antecedents of a fuzzy rule. Hence, a rule- base consists of a maximum of 64 rules. By representing the total coding for the control strategy in the usual form of a two-dimensional rules table, the coding of the rule antecedents, E and CE, can be made implicit by the posi- tions of rules in the table. For example. all rows are associated with one value of E and all columns are associated with one value of CE. Therefore, explicit codes will only be required for the peaks and the widths of these fuzzy variables.
To obtain near-optimal attributes of a rule, its param- eters are allowed to change. Thus, each of the linguistic values, the positions of the peaks and widths of fuzzy sets of the rule can change. Fig. 3 illustrates the representa-
Fig. 3 Linear partition fuzzy universe
tion of typical membership functions when the universe is linearly partitioned. These are fuzzy sets of a static rule- base, as found in a traditional fuzzy controller. Fig. 4 shows alternative membership functions of the same fuzzy set, in this case N M , when the peaks and widths are allowed to change. The coding of the jth parameter in a string of codes represents a value, l j between predetermi- ned minimum and maximum constraints given by
Lj = Ami, + (Amx - A,JA(u) (5 ) I E E Proc.-Control Theory Appl., Vol. 142, No. 3, M a y 1995
where I, , is the minimum parameter constraint, I,, is the maximum constraint and A(uJ) is a real number in [0 . . . 11 that indicates the relative magnitude of the jth
NM [/A, /
9 8 7 6 5 4 3 2 1
Fig. 4
parameter within its bounding constraints. A ( d ) is depen- dent on the decimal value of U, Dec (U) E [O, 1, . . . , 2 - 11 and the cardinality of the coding, equal to 2 - 1
where, lj is the codes length. The decimal value of a code is given by
Alternative membership functionsfor NM
Dec(d ) = ( i l u i 2 i - 1 ) (6)
where ai are binary code bits, numbered starting with the least significant. Consequently, A ( d ) is equal to
(7)
3.2.2 Population size: The choice of an appropriate population size is a fundamental decision to be taken in all C A implementations. Many studies have investigated population sizing including, the work of Goldberg [31] and De Jong and Spears [32]. On the one hand, if the population size is too small the C A will usually converge too quickly, and in many cases to a poor solution due to insufficient information in the population. Too large a population, on the other hand, will take a very long time to evaluate and in addition results in slow progression towards its final solution. Therefore, when the evaluation of a trial structure is computationally expensive, there is usually a need to impose a limitation on the size of popu- lation that the C A can reasonably support. This means obtaining a balance between the requirement for a large information capacity in the population and the need to produce a solution within a limited amount of time.
A theoretical basis for the sizing of populations has been Hollands 0(n3) schemata estimate [23]. Simply stated, this says that the number of schemata processed by a C A is proportional to the cube of the population size. This has been used in many studies to justify differ- ent, usually larger, population sizes. Grefenstette [27] used population numbers between 10 and 160 in an experimental design to optimise control parameters for a GA, but also demonstrated the interacting nonlinear rela- tions between population size and the recombination rates. Other studies on population sizing include: Odetayo [33] who used numbers between 100 and 400, and Robertson [34] who used population sizes of up to 8000 for classifier systems.
A detailed study was carried out by Goldberg [31] who analysed appropriate sizing of populations for serial and parallel GAS. He devised a figure of merit which compared the population sizing and convergence times for different lengths of coding. This figure of merit was expressed as
eo - 0, T,
A=-
where 0, is the initial number of schemata in a popu- lation, 0, is number of schemata in a population at con- vergence, and T, the time taken to reach convergence. The number of different schemata in a converged popu- lation is the number of different schemata represented by a single string, and is given by 2, where I is the string length. For example, a 2-bit binary string {lo} can rep- resent the schemata { 10, *0, 1*, **}. Thus, the number of schemata in a population of N different individuals is equal to 2. However, this is true for small size popu- lations and the number increases to 3 for very large populations when nearly all possible strings are rep- resented in the population. Hence, the figure of merit proposed above can be expressed as
2N - 2 A=- nc %
(9)
where N is the population size, nc is the number of gener- ation to reach convergence, and t, is the processing time per generation. A computer program was developed in the study to maximise the figure of merit for different values of 1. A surprising result was that although the required population setting increased linearly when the time to reach convergence was fixed, it was found to be constant regardless of the string length when the time to reach convergence is allowed to vary. Perhaps more sur- prising was the fact that this population size turns out to be equal to 3.
The above study provides a sound basis for selection of a suitable population size, although it ought to be said that the suggested population size of 3 should not be taken rigidly. It happens to be the minimum number that can allow selection of different pairs of individuals for recombination. However, a population size of 3 does not provide any meaningful diversity in the population. Hence, there is a need to increase the population size to achieve a good compromise between diversity and con- vergence time. In the current study, population sizes between 20 and 40 were used. Although these could be regarded as very small sizes in view of the string lengths (typically 2080 bits) it has been found that even the smal- lest size achieved good results with suitable recombi- nation operators. This result is supported by the work of De Jong and Spears [32] and Syswerda [35] who estab- lished that recombination operators that are highly dis- ruptive to schemata do actually achieve better performance than the traditional one-point crossover in GAS using small population sizes. In the study by Gold- berg [31] it was suggested that the rapid convergence of small populations can be used to advantage to improve ofline performance, by reinitialisation of the population when it becomes uniform. The GA in the present study does not reinitialise populations but permits high rates of disruption to existing populations, through increased mutation.
3.2.3 Reproduction: Reproduction is the process through which parent structures are selected to form new offspring, by applying genetic operators, which can then replace members of the old generation. Repro- duction itself is also an operator which produces ofi- spring identical to its parents. The method of selecting an individual to produce offspring (or to be deleted from the population) determines its lifespan and the number of its offspring. For example, if p , is the probability that an individual, A E ll is selected to produce offspring during a sample step and p2 is the probability that it will be deleted during that sample step, then the expected
165 IEE Proc.-Control Theory AppL, Vol. 142, No. 3, May 1995
number of offspring of A is p , / p 2 [23]. The most common reproduction techniques are generational replacement, generational gap and steady state schemes [4, 51. In this paper, a reproductive technique called selective breeding is introduced. As suggested by the name, this technique deterministically selects which ON- spring can become members of a new generation. Selec- tive breeding is proposed because it is envisaged that the determinstic replacement of population members will permit maximum exploration and exploitation within a population, and also that sampling errors can be reduced through the deterministic elitism. The four reproduction techiques, generational replacement, steady state, gener- ational gap and selective breeding are critically con- sidered and compared as follows.
Generational replacement replaces an entire generation by newly formed offspring. The offspring are created by selecting parents on the basis of their strength, that is, a fitter individual has a higher chance of being selected to be a parent. Genetic operators are then applied to form new offspring. The process is continued until the number of offspring is equal to the population size, and the popu- lation of offspring becomes the new population of trials for the next generation. This method maximises explora- tion of the search space through creation of an entire generation of new trials. Its main disadvantage, however, is that it often loses some of the best individuals in pre- vious generations without a chance of passing on their genes. Generational replacement is one of the earliest reproduction techniques and many of the pioneering studies in GAS have used the technique. Its performance is, however, usually inferior to other common techniques.
Generational gap method is similar to generational replacement except that it only replaces proportions of the existing population by the newly created offspring. A generational gap of 0.5, for example, implies that 50% of the present generation is replaced by newly formed off- spring. The individuals to be replaced may be chosen randomly or some form of elitism (so that the worse members of the population are the ones replaced) may be incorporated. The replacement method, however, does not guarantee that the offspring are any better than the individuals they replace. Thus, at large generational gaps this method is similar to generational replacement.
Steady state reproduction [35] overcomes one of the problems in the generational methods, being the loss of good individuals through sampling errors. In this method, typically, only one or two new offspring are introduced into each new generation to replace the worst members. Syswerda [36] compared generational replace- ment and steady state reproduction methods and found the steady state scheme to perform better. The method encourages more exploitation of the population species and hence tends to be very cautious, requiring several generations to improve the population mean fitness. The steady state reproduction method is elitist which means that the best individuals in the population are always passed into succeeding generations. It can be made to behave similarly to the generational methods by intro- ducing more offspring and randomly selecting the individuals to be deleted.
Selective breeding is a reproduction method that is designed to overcome some of the deficiencies in the other methods. It is noted that even the elitist techniques still experience sampling errors in the selection of parents and deletion of individuals from a population, and often good individuals can appear in a population and then be lost without a chance to recombine. Selective breeding 166
introduces determinism in order to eliminate stochastic sampling errors in deletion of candidates. The method functions as follows:
(a) An initial population, II(0) is created in the usual manner.
(b) The population is evaluated to determine the per- formance of each individual, p(A , , m = 1, . . . , M).
(c) for successive generations, thereafter : (i) An entire population of offspring, IIo(T) is
produced by selecting parents and applying genetic operators
(ii) The offspring population is then evaluated (iii) The next generation of population is obtained
by choosing the best M individuals from both n(r) and no( T).
It can be noted that selective breeding differs from the other techniques in the manner of forming the next gen- eration of population. It is a generational method in the sense that an entire population of individuals is formed at each instant. The replacement procedure which is likened to pedigree selection in livestock breeding. however, is a sorting procedure carried out to determine the best indi- viduals from both the parents and the offspring popu- lations, and is done in a way to ensure that no parent or offspring is retained while a better individual dies. This guarantees that the best individuals are always passed on from generation to generation and will not be lost due to sampling error or application of crossover and mutation until they become the worst in the population. This encourages exploitation of the good individuals. In addi- tion, since high performing individuals never die, tempo- ral diversity of trials can be maintained by continuously disrupting the offspring when created, so that they are significantly different from their parents. Temporal diver- sity is, diversity of populations from one generation to another, as opposed to spatial diversity which is diversity between population individuals in one generation. Tem- poral diversity enforces exploration especially in latter generations as the population becomes more homoge- neous. However, the disruption of populations (e.g., through high mutation rates) does not affect the oflline (best-so-far) or online (running population mean) per- formance since no individual enters the population unless it is better than the worst member. Selective breeding, therefore, maximises both exploitation and exploration of the population space.
It can be demonstrated that selective breeding, to qualify as a genuine C A reproduction technique, allo- cates schemata as provided by the schema theorem [22, 231. The expected number of copies which will be allocat- ed to any schema, according to the schema theorem, is given by
where m is the number of individuals in the schema; is the mean fitness of the schema; 7i;; is the mean fitness of the population. Since, under selective breeding the best individuals are always retained in the population, the number of copies of a high performing schema after one generation is given by
Thus, the number of copies of the best schemata increases, replacing lesser performing schemata until the population is filled up with the best. The rate of increase
I E E Proc.-Control Theory Appl., Vol. 142, No. 3, May 1995
of schemata is, by contrast, faster than in the traditional GA.
3.2.4 Crossover and mutation: Traditionally, the number of cross-over points used in a GA, which deter- mines the number of segments of the parent codes that are exchanged, has been set to 1. The supporting basis for this choice is the theoretical result expressed by the schema theorem. Specifically. the one-point crossover produces the minimal disruption to schema allocation. However, there have been experimental studies which have suggested the use of more crossovers and higher rates of mutation. The study carried out by Syswerda [35], for example, indicated that more disruptive forms of mating can improve the performance of a CA. A disrup- tive mating process is one which results in offspring that are significantly different from their parents. Disruption is considered advantageous when the population becomes homogeneous, when it can improve the pro- ductivity of a C A by continued creation of new trials. Under these circumstances, more conservative operators, such as the one-point crossover, produce offspring that are identical to !he parents and, hence, the search stag- nates. A latter study by De Jong and Spears [32] estab- lished that the improvement in performance was more with smaller population sizes than larger ones.
There are two types of multiple crossover, namely n-point crossover and uniform crossover [37]. In n-point crossover, n breakpoints are chosen at random at which points the parents bits are alternately passed on to the offspring. Offspring take genes from one of the parents until a crossover is encountered, at which point they switch and take genes from the other parent. Another crossover operator, called punctuated equilibria. func- tions in a very similar way except that the crossover points are themselves coded in a separate chromosome, which is also subject to genetic operators. In uniform crossover there is a probability p , that the offspring will take a bit from the corresponding positions of either parent. For example, when pc is 0.7 an offspring will acquire the genes of one of the parents with a probability of 0.7 (and the genes of the second parent with a prob- ability of 0.3). A value of p , equal to 0.5 thus implies random crossover since the offspring take on bits from the parents with equal likelihood, while p , equal to 1.0 or 0.0 creates offspring that are clones of the parents. The mechanisms of both types of crossover are illustrated in Fig. 5.
breok-points a
t = excFngec bits Fig. 5 il (n = 3tpoint crossover h uniiarm crossover
n-Point and uniform crossover
Mutation is a local operator that transforms the bits of a G A construct, replacing 1 with 0 and vice versa. Traditionally, the operator has been used as a random search process that was infrequently applied. Recent
IEE Proc.-Control Theory Appl., Vol. 142, No. 3, M a y 199.5
studies, however, have shown the mutation operator to play a more crucial role in genetic search. Studies by Muhlenbein [38] and Back [39], for example, have showed that the optimal rate of mutation is proportional to the length of the code and the modality of the problem. For example, it was shown that the optimal rate of mutation for a k-order function is k/ l , where I is the length of the coding. Hence, in this study some deter- minism was introduced into the mutation operator to ensure that m bits selected at random were altered. For small rates of mutation (when the probability of mutation p , 1/1) it is possible that no mutaton of the string will have occurred after testing all 1 loci. This approach also speeds up the computation involved in the mutation process, especially when I is large because instead of testing all loci for the chance to mutate only m (m < I ) positions are selected at random and flipped. Mutation was used in this study to create disruption of the popu- lation, rather than as a local improvement operator or to delay convergence, as is usual.
Crossover and mutation in context sensitive structures may require careful application to avoid generating obvi- ously unsuitable trials. For example, exchanging the lin- guistic values of different fuzzy rules can mean that the new offspring acquire membership functions that are obviously not suitable for them. Similarly, since the lin- guistic codes identify the premises of rules, mutation and crossover within these codes will create new premises that are merely duplicates of other rules. In this research, crossover is restricted to rules with the same goals, and no mutation is carried out on rule premises.
3.2.5 Fitness scaling: The schema theorem suggests that copies are allocated to competing trials in a population according to their mean fitness. Thus, if two similar indi- viduals in a population were to be assigned different fitness values, then the number of copies each receives in a new generation of population would be proportional to their assigned fitnesses. Scaling or transformation of the population fitness can, therefore, be used to exert selec- tive pressure between competing trials in a population. Two scenarios are usually encountered. In the early gen- erations of the search there are only a few good individ- uals in a population, which may then tend to dominate the selection and mating processes. They may rapidly reproduce among themselves, leading to a premature convergence. Later on in the search, most individuals in a population tend to be very similar and the search becomes nearly random because there is no preference of any one individual over the other. These two conflicting interests are examined in this paper; that is, the need to encourage diverse interbreeding in the early stages of the search, and the improvement of the mean fitness of the population, by exerting selective pressure to favour the best individuals.
There is no universal agreement on optimal fitness scaling strategies and few studies have considered a theo- retical treatment of the problem. However, many studies use either the ranking method [40] or the window method [27]. In an attempt to improve the GA used in this study, another fitness method is introduced based on a desire to overcome the difficulties experienced with the other methods. The new method called functional nor- malisation is a dynamic rescaling technique which con- tinuously adjusts the fitness values to maintain a desired selective pressure between the best and the worst trials. Investigative comparisons of the three fitness methods are carried out.
167
'Ranking' was introduced into GA practice by Baker [40], and is a technique in which the actual objective evaluations are replaced by new values assigned on the basis of their ranks in a population. Thus, after objective evaluations have been carried out, the individuals are sorted in terms of the magnitudes of evaluations, and then the corresponding members of the population are assigned new fitness values that are only a function of their ranks. The assignment is usually a contant decre- ment (or increment) from an upper (or lower) bound. For example, if the best individual may take a value of 100, the succeeding ranked individuals can have values of 90, 80, and so on. Alternatively, the ranking may be on the basis of a ratio between close individuals, such that in the present example the values taken may be 100, 90, 81 and so on, where the chosen ratio is 0.9. Minimum fitness values are in general restricted. Ranking assigns fitness values according to the equation
i j = + imin (12) where y: is the rank of an individual in a population, or the number of individuals which have a worse evaluation than the individual j at instant t , A is the fitness differen- tial between neighbouring individuals and imin is the minimum restricted fitness.
One of the problems with a ranking technique is that because it uses only the perceived rank of the individual in a population it tends to exaggerate small and perhaps insignificant differences in evaluations, while treating larger differences in exactly the same way. This means that in the early stages of the GA the poorer individuals, which there will be more of in the population, will tend to dominate the recombination process.
Windowiny methods assign fitness values by defining a minimum value of fitness for each generation. For example, new fitness values may be given by
[ . = & . - J J & m m (13) where cmin is a base-line value of evaluation. Often E,,,;" is not known a priori and the popular strategy is to contin- ually assign it values which have been observed in pre- vious generations. For example, if all individuals in a population have evaluations in the range C7.1 ... 9.23 a fitness base-line could be set at 6.0, and hence, by sub- tracting this number from all evaluations, new fitness values will be in the range [1.1 ... 3.21. The best individ- ual now has a three times chance of selection over the worst.
Functional normalisation is a new technique considered in this study. One of the most common fitness normal- isation techniques is linear normalisation [SI, which scales the objective evaluations according to the equation
i j = ai + b (14) The coefficients a and b are chosen to ensure that both the original objective evaluation and the scaled fitness have the same mean, and that the maximum value of the scaled fitness is a certain multiple of this mean. One shortcoming of the technique is that it does sometimes result in negative fitness values and it is, therefore, neces- sary to take precautions to deal with this. Functional normalisation, on the other hand, 'stretches' or 'compres- ses' the set of evaluations to maintain a given ratio of minimum to maximum fitness values, which is called the selection pressure K. This is done by calculating new maximum and minimum fitness values to give the desired ratio in each generation. The intermediate objective evaluations can then be interpolated linearly, or nonlin-
168
early. Linear transformation of a set of objective evalu- ations, for example, is carried out according to the following steps:
1 Calculate the new range of fitness values to obtain the required pressure, K,
where and E,, are observed minimum and maximum evaluations and K is a specified value of the selection pressure required
imax K i m i n (16) 2 Calculate the slope of the (linear) fitness transform-
ation
3 Assign new fitness to each individual by
i j = imin + ATEj - Emin) (18) Functional normalisation reduces the preference between very good individuals and the poorer ones in the early generations when the population is still diverse, in order to encourage interbreeding. However, it will exhibit marked differences between similar individuals in a near- homogeneous population. This behaves similarly to ranking, except that it preserves the proportionality of the objective evaluations. Whereas ranking assigns prede- termined fitness values based only on the perceived rank of an individual, functional normalisation dynamically determines new ranges necessary to exert a constant selection pressure, and assigns fitness at points pro- portional to an individual's objective evaluation. This removes the bias created by a ranking technique: thus, individuals that are not significantly different in objective evaluations will also not be significantly different after rescaling, and vice versa.
The genetic processes, reproduction, crossover and mutation, and the fitness rescaling techniques can be combined in different ways to suit a GA to a particular application, and because of the interdependence of these processes the derived genetic plans may perform differently.
3.3 Evaluation of trials Each individual (genotype) in a population is a hypo- thetical knowledge-base for a fuzzy logic controller, containing a complete set of linguistic rules, their mem- bership functions and a fuzzification/defuzzification strat- egy. The procedure of evaluating these knowledge-based consists of submitting each to a simulation model, and returning an assessment value according to a given cost function. A controlled process is defined by a set of state variables X = {xl, x2, . . . , xN} which are controlled by a set of control variables C = {cl, c2 , ..., c M } . The geno- types are trial 'control policies', for selecting C as a func- tion of Xi. The role of the adaptive plan is to derive an optimal policy A,,, which minimises a given performance function, J. In many cases, J is determined as a cumula- tion over time of some instantaneous cost rate, Q[X(t), C(t)]. i.e., J = Er=, Q[X(t) , C(t)]. As an example, a trial knowledge-base can be made to control the model of a process and then sum the errors over the response trajec- tory. The sum of errors is then directly related to the objective fitness of the trial. The configuration of such a learning scheme is shown in Fig. 6.
I E E Proc.-Control Theory Appl., Vol. 142. No. 3, May I995
The fitness of a trial is a measure of the overall worth of a solution which takes into account factors of an objective criterion, in this case, the performance of a
(fuzzy controller) (cost function)
learning model 4 (senetic alqorithm) populotion model I (trials)
Fig. 6 Ofline learning model
fuzzy controller implementable with the trial knowledge- base. The basic control objective is simply stated as the ability to follow a setpoint with minimal error. This objective can thus be expressed in terms of minimisation of controller performance indices which are in common use. These include integral of absolute errors (IAE), integral of square errors (ISE) and integral of time multiplied absolute errors (ITAE). Each of these indices has its own merits. For example, ITAE penalises errors at large values of time and leads to reduction in steady state errors at the expense of transient errors, while ISE is a more suitable mathematical analysis criterion. Further- more, the GA is only able to optimise the characteristics explicit in the cost function. In this work, it was found necessary to incorporate a penalty of excessive control effort into the evaluation cost function, in particular to prevent relay-type control. Thus, an index called integral of absolute control rate and error (IACRE) was derived. A general mathematical equation for such an evaluation cost function is
7
J = [n(y(k) - r(k)) + @(u(k) - u(k - l))] (19) k = l
where y(k) is the process output, r(k) the reference input, u(k) the control signal, and II and 0 are simple scaling functions. 1 was in this case, the sum-of-absolute values operator. Because this cost function is minimised, the least value returned is the best. Hence, to obtain an objective fitness from the trial evaluations it is required to reverse the orders of magnitude of the assessments while maintaining their relative ratios. Objective fitness assignment is performed according to the equation
N c 6; (20)
i = 1
J p . = ~
where p is the objective fitness, E is the cost function assessment given by J , and N is the size of the population of trials.
Evaluation of trials is the most demanding part of a GA in offline learning. Consider the following case. Simu- lated control and evaluation of trials were carried out by a numerical integration algorithm, using the fourth-order Runge-Kutta method. Each trial knowledge-base was allowed to control the model for a period equivalent to approximately five open-loop time constants of a process, and for five cycles from different initial conditions. Fur- thermore, in order to obtain more accurate simulation using the Runge-Kutta method, it is usually desirable to perform several integrations within a sampling interval.
IEE Proc.-Control Theory Appl., Vol. 142, No. 3, M a y 1995
All these add up to a very taxing computational load in terms of execution times. Consider, for example, the anaesthetic muscle relaxation process which has a time constant of approximately 2000 s. If the sample interval is set to 20 s, 500 samples are taken for each set of initial conditions. A simple calculation shows that the evalu- ation of each individual takes 25000 iterations. Thus, a population of 20 individuals evolved over lo00 gener- ations will have executed 500000000 iterations of the Runge-Kutta routines alone. In terms of execution time, if it takes 10 s to evaluate a trial knowledge base, a popu- lation of 20 individuals evolving over lo00 generations will have taken more than 55 h to evaluate. This demon- strates the need to derive an algorithm that obtains a suitable solution in fewer generations.
3.4 improvement of a genetic algorithm There are other factors which could improve the per- formance of a GA, especially for fuzzy controller design. These include: the need to speed up the evaluation using parallel processing, the need to reduce the size of the rule-bases, and improvement of the learning process with knowledge-based genetic operators. The time taken in evaluation of genetic structures imposes restriction on the size of the population and also the number of generations required to run the GA to a final solution. To alleviate the problem, parallel processing can be used to reduce generational execution times. There are two common approaches to parallel processing in GAS. The first approach is a one-population GA which only uses the multiple processors to divide the evaluation task. Each processor evaluates a given number of individuals and returns their objective assessment to the population. The second alternative is to have separate subpopulations on each processor which develop individual solutions. In such cases, usually, there is occasional migration of members between the subpopulations. This model of GAS is commonly known as a parallel or distributed GA (PGA) [41, 421. Although studies have shown this mode of GA to yield better solutions than the one-population GA, it does not solve the problem that is of concern to this study: reducing execution times. Thus. the first method of parallelisation is preferred, because the reduction times takes precedence over any possible achievement of an optimal solution with a PGA.
Human reasoning and decision making are guided by knowledge. Furthermore, fuzzy logic systems are designed to imitate this reasoning mechanism and are characterised by rules that are expressive knowledge- based models of the task domain. In contrast, C A in their basic form are dependent only on coding, function evalu- ations and exchanges of the codes between individuals. This is both an advantage and a disadvantage. Although the ability to work without problem specific information allows GAS to be applicable to different problems without specific tailoring, failure to make use of available domain knowledge would definitely put them at a dis- advantage against other methods that could use such information. One way of utilising available knowledge would be to use it to seed the initial populations. The advantage of this is that it can result in a reduction in the number of generations required to reach a satisfactory solution. Another way of utilising available knowledge is to use knowledge-based genetic operators that exploit any known regularities in the domain space. The evalu- ation of a genetic structure representing a fuzzy rule is carried out at a knowledge level since the structures are first interpreted into fuzzy rules, and then applied to the
169
task domain. It would, therefore, be desirable that the processing and modification of these genetic structures should also be conducted at the knowledge level. This study proposed simple knowledge-based operators for the GA-fuzzy learning system. Knowledge-based cross- over is operated at the conditional level, and exchanges complete segments representing one or more parameters of a fuzzy set. Similarly, mutation when applied to a lin- guistic code alters it to another valid linguistic code, which in this research was restricted to a linguistic dis- tance of two, to avoid possible large deteriorations in performance. These are illustrated in Figs. 7 and 8.
crossover point I I
a I b I c L ! d ] e I f I parents I I
[ A I B I C 1 I D ] E I F ] I
Fig. 7 Knowledge-based crossover a . . . f and A . . . F are code segments represenling linguistic names and fuzzy sets of rules
Fig. 8 Knowledge-bused mufation Mutation changes the linguistic fuzzy set to another. a distance of one or two away
4 Learning and simulation results
This paper investigates the development of a suitable C A technique for fuzzy design. A C A may be derived in several ways depending on how its parameters are chosen. Population size, for example, was a constraint in view of evaluation times for large populations. Hence, it was reasonable to decide on a suitable population size as a starting point. The population size was fixed at 50, although similar results have been obtained with different sizes of population. Likewise, the genetic operators used comprise the multiple-point crossover, and mutation operators discussed previously. To determine the most suitable choice of the other parameters of a genetic plan, the reproduction and fitness techniques, also discussed above, were then compared in a series of controlled domain experiments. The best genetic plan is the one which achieves the stated objective: to achieve the best solution using the smallest number of evaluations.
The GA is used to derive rules for a multivariable fuzzy controller. The fuzzy controller is then, applied to the control of multivariable anaesthesia, comprising the simultaneous regulation of paralysis and the depth of unconscious in patients undergoing surgical operations. This involves administration of two types of drugs, in this case atracurium for muscle relaxation and isoflurane for the depth of unconsciousness. Identification studies for each of these drugs have been carried out by Weatherley et al. [43] and Millard et al. 1441 for atracurium and isoflurane, respectively. Identification of the interacting dynamics has been carried out by Asbury, and is described in Linkens et al. [45]. The resulting multi-
I70
variable anaesthetic model is given by
1.&-(1 + 10.64s) (1 + 3.08sX1 + 4.81s)(l + 34.42s) [;I=[ 0
(1 + 2.0s)
a I b I C I D ] e I f offspring
A l B I C I d ] E I F
where U , is the drug atracurium rate, (I2 is the drug isoflurane rate, Yl is muscle relaxation (MR) response (expressed as a % o f a l paralysis), Y2 is mean arterial pressure change, A M A P .
In addition, the pharmacodynamic effect of atracurium, which is described as the relationship between the drug concentration in the body plasma and the dynamic effect of the drug, is usually modelled by a Hill equation [46]
where E,, is the maximum effect of the drug possible, X,,, is the concentration necessary to cause 50% effect and a is a constant. The average values of a and X,, , are given as 2.98 and 0.404, respectively [45].
4.1 Learning results Results of comparisons between different genetic adaptive plans are shown as profiles of the learning process in each CA. The characteristics of the learning processes are given by the mean fitness of the population, the fitness of the best individual in the population and the all-time-best fitness in each generation. In elitist techniques, the best individual is also the all-time-best, since the best individ- uals are always retained. The fitness of an individual is indicated as the value returned by the error criterion which is minimised, that is the integral of absolute control rate and error (IACRE). Each reproduction method was evaluated with each of the fitness methods. The results show the mean performance profiles of 10 runs of the GAS, each of which was initialised with a dif- ferent random population. The parameters of the genetic adaptive plans (population size, reproduction, crossover, mutation and fitness scaling) were the same in all experi- ments.
Fig. 9 shows the fitness profiles for the generational replacement (GR) method using fitness rescaling by the three methods, functional normalisation (NORM), ranking (RANK) and windowing (WIND). It is observed that this method does not significantly improve the popu- lation fitness, after the initial few generations. In the
I E E Proc.-Control Theory Appl., Vol. 142, No. 3, May 1995
usual application of 'generational replacement' the all- time-best individual may not exist in all generations since entire populations are replaced in each sample step. This is evidenced by the fact that the best individual in the latter generations is worse than the all-time-best. Without any means of deterministically selecting or
120 I
01 1 I I I I a
1
I I 1 I
0 1 @@OO 200@0 number of evaluations
b
Fig. 9 Learning profile of G R method 0 NORM A RANK + WIND
~1 mean fitness h best fitness
retaining the best individuals in the population they are likely to be lost without being exploited to pass on their characteristics to new offspring.The task of improving the population then relies on the fitness technique to create competition between the fitter individuals. Fitness com; petition, due to sampling errors, does not guarantee that the best individuals are selected for recombination to produce better trials.
The steady-state (SS) method of reproduction retains the best individuals in the population and, in many cases, introduces only a pair of new individuals into the next generation of population. Competition for survival with this technique, thus, is less stringent since individuals not selected for recombination are likely to survive anyway, except for the least fit. This, as is shown in Fig. 10, results in a progressive improvement in the population fitness. It is also shown that the method is less sensitive to the fitness method used, and hence achieves good results with all three fitness methods.
I E E Proc.-Control Theory Appl., Vol. 142, No. 3, M a y 1995
The generational gap (GG) reproduction technique replaces a proportion of the population with new off- spring. When the gap is small the method behaves simi- larly to the steady-state technique, especially if the individuals that are replaced are the least fit in the popu- lation. When the gap is large it is similar to generational
c '_r(
t t
1201
I 01 1 I I 0 1@00@ ?@Cl 30
number of evaluations b
Learning profile of SS method Fig. 10 0 NORM A RANK + WIND a mean fitness h best fitness Best values far b: 0 27.31; A 27.45; + 27.80
replacement. The generational gap in this study was set at 20%. It is shown in Fig. 11 that the behaviour of the C A has the characteristics of the generational replace- ment method, although a significant improvement in fitness is obtained.
The selective breeding (SB) method was introduced in this research as a technique which combines rapid gener- ation of trials (obtained with generational replacement methods) and the caution of the steady-state method. It is designed to maximise both exploitation of fit individuals and exploration of the search space by creating entire populations of offspring while at the same time retaining the fittest. As shown in Fig. 12 the characteristics of this method are very similar to the steady-state method, and this method achieves a marginally better final solution.
171
It can be concluded that the best CA reproduction methods are the steady-state and selective breeding tech- niques, which achieved very similar results with all types of fitness techniques. Comparison of the fitness tech- niques, however, does not offer conclusive merits of one
I 120 4 2 Performance results The results of the learning process are the rule bases that are used to control the multivariable anaesthesia model. The rules obtained with the steady-state and the selective breeding reproduction methods together with the ranking
I
1 120
0 1 I 01 I I I I a
I 120
I I I I I 10000 20000
number of evaluations b
Fig. 11 0 NORM A RANK + WIND
Learning profile of GG method
a mean fitness b best fitness &st values forb: 0 47.91; A 73.12; + 31.20
technique over the other. Although all fitness techniques performed well with the steady-state and selective breed- ing reproduction methods, the generational methods were more sensitive to the type of fitness technique used. Ranking achieved the best result for generational replace- ment and selective breeding, but was the worst with the generational gap method. Functional normalisation achieved the best result with the steady-state method, while windowing produced the best results with the gen- erational gap method. It is worth noting that studies which have investigated factors affecting performances of C A have tended to favour either of the combinations. Grefenstette [27] used generational gap and windowing while Schaffer er al. [29] used ranking and the steady state techniques. 172
0 0 0 10000 20000 number of evaluations
b
Fig. 12 0 NORM A RANK + WIND a mean fitness b best fitness Best values for b : 0 27.25; A 26.84; + 26.14
Learning profile of S B method
and functional normalisation fitness methods were used. This is because results obtained using the generational replacement and generation gap methods were, generally, unsatisfactory as demonstrated by the fitness profiles shown in Figs. 9 to 12.
A typical linguistic rule-base is shown in Table 1. Three such rule-bases were derived: one for control of MAP, the second for direct control of MR and the other for compensation of the interactions between the two processes. Examination of the table suggests some of the generated rules to be intuitively inappropriate. A more correct picture, however, is obtained when the linguistic labels are taken together with their actual membership functions. This is because in the learning process, individ- ual rules develop their own membership functions. So,
I E E Proc-Control Theory Appl., Vol. 142, No. 3, M a y 1995
seemingly different linguistic values may actually have similar membership functions, and vice versa. On the other hand, it can be noted that because the inferred control actions are incremental, rather than absolute, the sign of the increment is more significant than its actual magnitude. This is because even small increments (decrements) can soon result in a large (small) control action.
Table 1 : Rules for control of M R
Error Change-in-error
NB N M NS NO PO PS PM PB
Another way of looking at the rules is a control deci- sions' table that shows inferred actions for different process states (error and change-in-error). An example of
Lo[ ~ _ _ _ _ _ _ _
PB PB PO PB PO PS PB PO PO PM PO PS PO PB PO PO PB PB PS PO PS PS PS PS PB PS PM PO PS PM PO PM PO PS PM PB NO NS NS NS NS NS NB NB NO NS NS NB N M NS NS NS NS NB NM NS NO NB NS N M NS NO NO NB NO N M NB NS NO NO NS NB
1 0
0.8 a f 0.6 6 0.4 E
0.2
0 1 0
'h I?
E- OCE
Fig. 13 (top) and M A P
Rules surface, showing location of dominant rules, for M R
0.6
h : o h '0 50 100 150 200 0 50 100 150 200
minutes minu,tei b b
Fig. 14 normalisation methods n and a' MAP response band b MR responses. showing interactions from MAP
Multivariable response, from selective breeding and fitness
d 40
20 I - Z 0 L L L - L -
' 0 50 100 150 200 0 50 100 150 200 minutes minutes
b b'
Fig. 15 methods o and a' MAP response band b' MR responm, showing interactions from MAP
Multivariable response, from selective breeding and ranking
Table 2: Control table for M R
E CE
-10 -8 -6 -4 -2 0 2 4 6 8 10 ~~
10 9.8 9.8 9.4 6.1 6.1 7.9 5.1 5.5 4.5 2.9 1.9 8 8.3 8.6 8.6 6.1 6.2 7.0 5.2 5.2 4.5 2.9 2.2 6 5.7 6.6 7.2 4.6 4.6 5.2 4.9 5.1 4.0 2.7 2.5 4 5.1 5.1 4.4 -1.0 3.2 3.5 2.0 1.0 1.9 1.3 1.3 2 -1.6 -1.6 -1.4 -0.6 1.2 1.9 1.1 1.2 1.5 1.5 1.4 0 -0.7 -0.8 -0.7 -0.4 -0.6 -0.0 0.1 0.7 -1.2 0.2 2.6
-2 -2.0 -2.5 -1.9 -1.3 -2.9 -0.0 1.1 0.8 -2.9 0.7 2.7 -4 -4.8 -4.9 -5.0 -3.9 -4.2 -2.5 -1.3 -3.0 -0.5 1.8 1.7 -6 -3.9 -3.9 -4.3 -3.5 -4.7 -3.6 -3.5 -2.9 0.9 1.8 1.8 -8 -3.5 -3.5 -3.0 -3.1 -3.4 -3.3 -4.0 -2.8 -0.8 -2.7 -2.7
-10 -3.5 -3.5 -3.0 -3.1 -3.1 -3.3 -3.9 -3.5 -3.0 -4.7 -4.7
I E E Proc.-Control Theory Appl., Vol. 142, No. 3, May 1995 173
control decision tables derived from the linguistic rule- bases is given in Table 2. This table is obtained from the rule-base by scanning the input space and inferring an input for each point. The table is similar to 'look-up tables' sometimes used for direct fuzzy control [47,48].
Finally, results of the rules obtained in the learning process were evaluated on the domain task, being the simulated control of the multivariable anaesthesia model. On the one hand, it can be seen that the selective breed- ing method (Figs. 14 and 15) achieved better results than +-- a' a 40
0 L U
E
a'
100
6 0
rr' LO 2
I 20 - -
minutes rrinuies b b'
minutes b b'
minutes
Fig, response, from steady normnl. Fig. 18 Multivariable response, from a generational gap GA a and a' MAP response band b MR responses, showing interactions from MAP For b : ITAE = 6525.92; IAECE = 90.60
isation methods (1 and a' MAP response b and b MR responses, showing interactions from MAP
40 = t 01 " 1 ' " ' J
a
the steady state method (Figs. 16 and 17), as indicated by the ITAE and IACRE figures of merits. On the other hand, use of the ranking fitness method (Figs. 15 and 17) is observed to achieved better results than the functional normalisation method. The combination of the selective breeding and ranking techniques achieved the best result (Fig. 15). As expected, control rules obtained from the generational replacement schemes performed significantly worse, as demonstrated in Fig. 18.
a'
ULU '0 50 100 150 200 ' '0 50 100 150 200
minutes minutes b b'
Fig. 17 Multivariable response, from steady state and ranking methods a and 0' MAP response band h MR responses, showing interactions from MAP For h : ITAE = 3377.73; IACRE = 16.67
A further presentation of the results is a graphical display showing the highest 'firing level' of all points in the input space to the rules. This representation indicates the number and location of the rules, since the highest degree of firing is found at the position of the peak of the rule fuzzy sets. This is portrayed in Fig. 13 for both MAP and M R .
174
5 Conclusion
The objective of this paper was to investigate the use of genetic algorithms as a tool for the design of fuzzy con- trollers. To do this it was first necessary to derive a GA scheme that produces an acceptable set of control rules, in an acceptable time period. This is because learning with GAS requires many iterations and consequently, a large amount of processing time. For a problem of the complexity considered in this research this could mean several hundred processor hours. In this regard the learn- ing experiments in this research were carried out on a parallel processing transputer platform.
Common reproduction and fitness techniques were studied in this work, and in addition new reproduction and fitness techniques were investigated, both aimed at improving on the usual methods. Experimental results showed that only the steady-state reproduction method, among the usual methods, achieved good results in terms of the performance of the final rules. It was concluded that the best genetic plans for this type of problem were the steady state and the selective breeding techniques, and the best fitness methods were ranking and functional normalisation. However, it ought to be stated that this
I E E Proc.-Control Theory Appl., Vol. 142. No. 3, M a y I995
does not demonstrate that any reproduction method or fitness technique is better than the other, except under the specific circumstances investigated.
This research has investigated two different approaches for applying CA in fuzzy controller design. The second approach is discussed in part I1 of this paper. This is an online approach in which the fuzzy control rules are acquired in real time. The two approaches represent two extremes of learning with CA. In the offline method presented in this paper, a model of the process is required, but more robust rules are derived. In the online case, long periods of experimentation may be required when no a priori knowledge is available. The method may also not be applicable to all types of processes. However, it is an effective method of rule acquisition, when a certain amount of a priori knowledge is available or can be assumed. The combination of these two approaches presents an attractive technique for design of adaptive fuzzy controllers, the offline method being used to generate an initial rule-base which can then be modi- fied online.
6 References
I ASSILIAN, S., and MAMDANI, E.H.: An experiment in linguistic synthesis with a fuzzy log~c controller, lnt . J. Man Machine Studies, 1977,7, pp. 1-13
2 KING, P.J., and MAMDANI, E.H.: The application of fuzzy control systems to industrial processes, Autornatica, 1977, 13, pp. 235-242
3 MAMDANI, E.H.: Appkations of fuzzy algorithms for control of a simple dynamic process, Proc. I E E , 1974, 121, pp. 1585-1588
4 DAVIS, L.: A handbook of genetic algorithms (Van Nostrand Reinhold, New York, 1990)
5 GOLDBERG, D.E.: Genetic algorithms in search, optimization and machine learning (Addison-Wesley, 1989)
6 KARR, C.L., FREEMAN, L.M., and MEREDITH, D.L.: Improved fuzzy process control of spacecraft autonomous rendezvous using a genetic algorithm, SPIE lntelligenr Control & Adaptive Systems, 1989,11%, pp. 274-288
7 KARR, C.L.: Genetic algorithm based fuzzy control of spacecraft autonomous rendezvous, in BELEW, R., and BOOKER, L. (Eds.): Proceedings of the fourth international conference on Genetic algo- rithms (Morgan Kauffman Publishers, Cambridge, MA, 1991). pp. 43-51
8 COX, E:.: Fuzzy fundamentals, l E E E Spectrum, 1992, 29, (lo), pp. 58-61
9 DALEY, S., and GILL, K.S.: A design study of a self organizing fuzzy logic controller, Proc. Inst. Mech. Eng., 1986, 200, (CI), pp. 59.~ 69
I O LINKENS, D.A., and ABBOD, M.F.: Self-organizing fuzzy logic control for real-time processes. Proceedings of the IEE internation- al conference Control, Edinburgh, UK, 1991
1 I PROCYK, T.J., and MAMDANI, E.H.: A linguistic self organizing process controller. Automatica, 1979, 15, pp. 15-30
12 ABBOD, M.F.: Supervisory intelligent control for industrial and medical systems. PhD dissertation, Department Automatic Control & Systems. Engineering, University of Shefield, UK, 1992
13 PETERS, I., BECK, K.. and CAMPASANO, R.: Fuzzy logic with dynamic rule-set. Proceedings of the IEEE symposium on Intel. control, Glasgow, UK, 1992, pp. 216-219
14 MIZUMUTO, M.: Fuzzy controls under various reasoning methods. Inform. Sci.. 1988. 45, pp. 129-151
15 LINKENS, D.A., and ABBOD, M.F.: Self organizing fuzzy logic control and the selection of its scaling factors, Trans. Inst. Meas. & Control, 1992, 14, (3). pp. 114-125
16 CELLIER. E.F., and ALVAREZ, F.M.: Systematic design of fuzzy controllers using inductive reasoning. Proceedings 1992 IEEE inter- national symposium on intelligence control, Glasgow, 1992, pp. 198-203
17 LINKENS, D.A., and SHIEH, J.: Self-organizing fuzzy modelling for nonlinear system control. IEEE international symposium on intelligence control, Glasgow, UK, 1992, pp. 210-215
18 MICHALSKI, R.S.: A theory and methodology of inductive reasoning, Artificial Intelligence, 1983, 20, pp. I1 1-161
19 MITCHELL, T.M., MAHADEVAN. S., and STEINBERG, L.: LEAP: a learning apprentice for VLSI design. Proceedings of the
IEE Prm-Control Theory Appl., Vol. 142, No. 3, M a y 1995
9th international joint conference on Artificial intelligence (Morgan- Kauffman Publishers, 1985). pp. 573-580
20 KARR, C.L.: Design of an adaptive fuzzy logic controller using a genetic algorithm, in SCHAFFER, I. (FA.): Proceedings of the third international conference on Genetic algorithms (Morgan Kauffman Publishers, Cambridge, MA, 1989), pp. 450-457
21 THRIFT, P.: Fuzzy logic synthesis with genetic algorithms, in BELEW, R., and BOOKER, L. (Eds.): Proceedings of the fourth international conference on Genetic algorithms (Morgan Kauffman Publishers, Cambridge, MA, 19911, pp. 509-513
22 HOLLAND, J.H.: &Genetic algorithms and the optimal allocation of trials, SIAM J. Compur., 1973,2, (2), pp. 89-104
23 HOLLAND, J.H.: Adaptation in natural and articifical systems (Addison-Wesley, 1975)
24 ANTONISSE, H.J., and KELLER, K.S.: Genetic operators for high level knowledge representation, in GREFENSTETTE. J. (Ed.): Pro- ceedings of the second international conference on Genetic algo- rithms (Lawrence Erlbaum Publishers, Hillsdale, NI. 1987). pp. 69-76
25 CARUANA, R.A., and SCHAFFER, J.D.: Representation and hidden bias: Gray vs. Binary coding for genetic algorithms, in LAIRD, J. (Ed.): Proceedings of the fifth international conference on Machine learning (Morgan-Kauffman Publishers, Camhridge, MA. 1988), pp. 153-161
26 SCHRAUDOLPH, N.N., and BELEW, R.K.: Dynamic parameters encoding for genetic algorithms, Machine Learning, 9 (Kluwer Aca- demic, 1992), pp. 9-21
27 GREFENSTETTE, J.J.: Optimization of control parameters for genetic algorithms, IEEE Trans. Syst. Man & Cyhern., 1986, SMC-16, pp. 122-128
28 DAVIS, L.: Adapting operator probabilities in genetic algorithms, in SCHAFFER, J. (Ed.): Proceedings of the third international con- ference on Generic algorithms (Morgan Kauffman Publishers, Cam- bridge, MA, 1989). pp. 61-69
29 SCHAFFER, J.D., CARUANA, R.A., ESHELMAN, L.J., and DAS, R.: A study of control parameters affecting online performance of a genetic algorithm for function optimization, in SCHAFFER, J. (Ed.): Proceedings of the third international conference on Genetic algorithms (Morgan Kauffman Publishers, Cambridge. MA, 1989), pp. 51-60
30 DE JONG. K.A.: Are genetic algorithms function optunizers?, in MANNER, R., and MANDERICK, B. (Eds.): Proceedings of the second workshop on Parallel problem soloing Jrom nature (Springer- Verlag, Berlin, 1992). pp. 2-13
31 GOLDBERG, D.E.: Sizing populations for serial and parallel genetic algorithms, in SCHAFFER, J. (Ed.): Proceedings of the third international conference on Genetic algorithms (Morgan KauIT- man Publishers, Cambridge, MA, 1989), pp. 71-79
32 DE JONG. K.A., and SPEARS, W.M.: An analysis of the inter- acting roles of population size and crossover in genetic algorithms, in SCHWEFEL, H.-P., and MANNER, R. (Eds.): Proceedings of the first workshop on Parallel problem solving Jrom nature, Dortmund, West Germany (Springer-Verlag, Berlin. 1990), pp, 39-47
33 ODETAYO, M.: Optimal population sue for genetic algorithms an investigation. IEE digest of the colloquium on genetic algo- rithms in control systems engineering (London, May 1993)
34 ROBERTSON, G.G.: Population size in classifier systems, in LAIRD, J. (Ed.): Proceedings of the fifth international conference on Machine learning (Morgan-Kauffman Publishers, Cambridge, MA, 1988), pp. 142-152
35 SYSWERDA, G.: Uniform crossover in genetic algorithms, in SCHAFFER, I. (Ed.): Proceedings of the third international con- ference on Genetic algorithms (Morgan Kauffman Publishers, Cam- bridge, MA, 1989). pp. 2-9
36 SYSWERDA, G.: A study of reproduction in generational and steady state genetic algorithms, in RAWLINS, G.J.E. (Ed.): Pro- ceedings of a workshop on foundations of Generic algorithm and classifier systems (Lawrence Erlbaum Publishers, Hillsdale, NJ, 1991), pp. 94-101
37 SCHAFFER, J.D., and MORISHIMA, A.: An adaptive crossover distribution mechanism for genetic algorithms, in GREFEN- STETTE, 1. (Ed.): Proceedings of the second international con- ference on Genetic algorithms (Lawrence Erlbaum Publishers, Hillsdale, NJ, 1987), pp. 36-40
38 MUHLENBEIN, H.: How genetic algorithms really work. I : Muta- tion and hill-climbing, in GREFENSTETTE, 1. (Ed.): Proceedings of the second international conference on Genetic algorithm (Lawrence Erlhaum Publishers, Hillsdale, NI, 1992). pp. 15-25
39 BACK, T.: Optimization of mutation rates in genetic search, in FORREST, S. (Ed.): Proceedings of the fifth international con- ference on Genetic algorithms (Morgan Kauffman Publishers, C a n - bridge, MA, 1993). pp. 2-8
175
40 BAKER, J.: Adaptive selection methods for genetic algorithms. Proceedings of an international conference on Genetic algorithms (Lawrence Erlbaum Publishers, Hillsdale, N.J., 1985), pp. 100-111
41 MANDERICK, B., and SPIESSENS, P.: Fine grained parallel genetic algorithms, in SCHAFFER, J. (Ed.): Proceedings of the third international conference on Genetic algorithms (Morgan Kaull- man Publishers, Cambridge, MA, 1989), pp. 428-433
42 TANESSE, R.: Distributed genetic algorithms, in SCHAFFER, J. (ed.): Proceedings of the third international conference on Genetic algorithms (Morgan KaulTman Publishers, Cambridge, MA, 1989),
43 WEATHERLEY, B.C., WILLIAMS, S.G., and NEILL, E.A.M.: Pharmacokinetics. pharmacodynamics and dose-response relation- ships of atracuriurn administered i.v., Brit. J. Anae., 1983, 55, pp. 39s-45s
pp. 434-439
44 MILLARD, R.K., MONK, C.R., WOODCOCK, T.C., and PRYS- ROBERTS, C.: Controlled hypotension during ENT surgery using self-tuners, Biomed. Meas. Infor. Contr., 1988, 2, pp. 59-72
45 LINKENS, D.A., MAHFOUF, M., and ASBURY, A.J.: Multi- variable generalized predictive control for anaesthesia. Proceedings of the European control conference, Grenoble, France, 1991
46 GODFREY, K.R.: Pharmacokinetics, Trans. Imtiture Meas. & Control, 1982,4, pp. 213-223
47 CHUNYU, H.T., TOGUCHI, K., SHENOI, S., and FAN, L.T.: A technique for design and implementation of fuzzy logic controllers. Proceedings of the 1989 American control conference, pp. 2754- 2755
48 KWOK, D.P., et al.: Linguistic PID controller. Proceedings of IFAC 11th congress, Tallin, USSR; pp. 192-197
176 IEE Proc.-Control Theory Appl., Vol. 142, No. 3, May 1995