Embed Size (px)
Citation preview
![Page 1: [IEEE 2007 3rd International Conference on Recent Advances in Space Technologies - Istanbul, Turkey (2007.06.14-2007.06.16)] 2007 3rd International Conference on Recent Advances in](https://reader030.pdfslide.net/reader030/viewer/2022020407/575082661a28abf34f998730/html5/page/1.jpg)
Technology Drivers and Challenges ForNext Generation Distributed Spacecraft Systems
Can Kurtulus*', S. Egemen Imret2, Gokhan Yukselt3, Gokhan Inalhan*4*Istanbul Technical University, Faculty of Aeronautics and Astronautics, Istanbul, Turkey
tTUBITAK Uzay Satellite Technologies Group, Ankara, Turkey
Abstract- Distributed spacecraft systems is envisioned to Other modular and flexible efforts providing Lego-likeprovide the technology platform to extend, improve and construction capability similar to the aforementioned projectsenable mission concepts such as wide aperture radars for are inflatable antennas [2], [3] and the Non Contactinghigh-precision space-borne surveillance, 3D mapping of Modular Reconfigurable Spacecraft Project [4]. The DARPA-Earth's magnetic field and even deep-space interferometry NASA Orbital Express on-orbit servicing mission is in ato better understand the origins of the universe. However, a similar spirit to these projects since it demonstrates automatedmission with a fully autonomous spacecraft fleet flying in rendezvous and docking technology and performs physicalclose-proximity or in a tightly kept configuration has yet to exchange of parts. This mission will play a central role in spacebe realized. experimentation of modularity, reconfigurability and longevity
In this work, we review the major technology drivers and for future missions.challenges for such next generation systems across aselective set of on-going, cancelled or proposed space The second category of formation flight is envisioned tomissions. Our analyses identify five main classes of provide innovative approaches in applications such astechnology drivers from navigation and control distributed imaging capabilities both in planetary orbits andperspective. These drivers are enumerated for a typical deep space, mapping of the Earth's magnetic field accurately,interferometric SAR example. The example illustrates steep and large scale testing of physical phenomena in thetechnological challenges such as the need for sub-millimeter foreseeable future. This category is the main focus of thisrelative navigation solution accuracy for even decimeter paper.level vertical image resolution. We conclude with an initialeffort at outlining a cost effective and robust roadmap for Advantages of distributed space systems includeflight maturation of the key technologies to deem such improvement of observation resolution, thus scientific return,missions and goals achievable. prevention of a single point of failure and suitability to
supporting living environments. Without such systems, theseI. INTRODUCTION would be either unlikely or impossible goals. Some enabling
technologies for distributed systems have been demonstrated soRecent successes in missions such as EO-1 EFF, Cluster II, far. These include on-board orbit control [5], autonomous
ST5, and with many more projects such as Laser Interferometer simple constellation keeping [6], somewhat accurate relativeSpace Antenna (LISA), PRISMA, MMS on the drawing board, motion modeling [7],[8], CDGPS [9],[10], formationdistributed spacecraft concepts has attracted a sustained interest algorithms [32] various payloads, basic spacecraft autonomyfrom space organizations and scientists. [11], on-board processing. The reader is referred to references
[12] and [13] for a survey of state of the art in formation flightDistributed systems can be grouped into two broad guidance and control.
categories: Modular and/or large scale systems and free-flyingformations. The first category contains monolithic structures However, we note that a mission with a fully autonomoussuch as the International Space Station, the Japanese space spacecraft fleet flying in close-proximity or in a tightly keptbased solar power station effort [1] and the privately funded configuration has yet to be realized. In Section 2, we reviewresurrection of the NASA Transhab concept, which uses the existing formation flying experiments and concepts,inflatable structures to provide living quarters in space. outlining the major technology drivers for such next generation
systems. The major trend that is observed is the steep"maturation vs. flight demonstration" curve of technologicalcapabilities across the mission and science challenges. In light
1 Graduate Student, kurtulusca~itu.edu.trof this trend, Section 3 provides an initial effort at outlining a
2 SenoraaeStudent, kurtuluscagitu.edu.tr cost effective and robust roadmap for flight maturation of the2Senior Researcher, Ph.D., [email protected] key technologies.3Manager, [email protected]
4Assistant Professor, Director of Controls and AvionicsLaboratory, inal Ar
1-4244-1057-6/07/$25.OO ©C2007 IEEE. 503
![Page 2: [IEEE 2007 3rd International Conference on Recent Advances in Space Technologies - Istanbul, Turkey (2007.06.14-2007.06.16)] 2007 3rd International Conference on Recent Advances in](https://reader030.pdfslide.net/reader030/viewer/2022020407/575082661a28abf34f998730/html5/page/2.jpg)
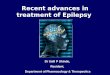
TABLE ISURVEY OF ACTUAL OR CONCEPTUAL MISSIONS ACROSS THE CHARACTERIZATION MATRIX INCLUDING
CONSTELLATION/FORMATION SIZE AND RELATIVE POSITIONING ACCURACY
3;I _ CC
ISE < E E E ce 2| E IN C kga E | E......... ................................ ......... iiiiiii Uiiiiii iiiii |C C C !C.....
=|-|,|=3X-*- ''|||11111111111111111111111111111 X!,C E S LO tSJE S E 8
In C
....... ........................................................... ......................................... .... ....
...................................... .
.........................I
.............. * f.
1 ~~~~ ~ ~ ~ ~ ~ ~ ~ ~ f cl M
504
![Page 3: [IEEE 2007 3rd International Conference on Recent Advances in Space Technologies - Istanbul, Turkey (2007.06.14-2007.06.16)] 2007 3rd International Conference on Recent Advances in](https://reader030.pdfslide.net/reader030/viewer/2022020407/575082661a28abf34f998730/html5/page/3.jpg)
II. TECHNOLOGY DRIVERS AND CHALLENGESTo illustrate how these challenges size up across a
Towards identifying the major technology drivers for next mission concept, we consider a typical Interferometricgeneration systems, we provide a brief outline of on-going, Synthetic Aperture Radar (InSAR) mission. SAR is a typecancelled or proposed space missions. These mission of active remote sensing where the reflection of transmittedconcepts, corresponding timeline, the number of spacecraft electromagnetic radiation is processed for the constructioninvolved, orbit types and the formation/constellation sizes of a target image. The frequencies used allow cloudwith the required relative positioning accuracy are given in penetration and imaging at night. The synthetic part of theTable 1. Each of these missions rely on experimental or to- name comes from the fact that multiple observations alongbe-developed technologies covering precise relative the flight path obtained in succession are processed togetherdynamic modeling, orbit determination (absolute and to obtain the final image, in practice forming an aperturerelative), relative navigation and formation keeping control. much larger than the antenna itself. We refer the reader to
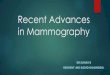
[17] for an in-depth discussion.One of the key trends is how the control and navigationrequirements translate as the formation baselines change. Interferometric SAR (InSAR) is the combination of SARWe note that this fact is strongly correlated with the mission and interferometric techniques which aims to providetypes (Synthetic Aperture Radar (SAR), Interferometry, topography or motion data unavailable with conventionalScientific Data Collection, On-orbit access) and its SAR. InSAR applications use the phase of the return signalcorresponding unique baseline and control-navigation in addition to the amplitude to obtain a relative phaserequirements. The grouping of these mission types from difference between SAR images obtained by receiverscontrol accuracy vs. formation size perspective is illustrated separated in various configurations. Multiple spacecraftin Figure 1. formations can be used to create these large aperture
antenna arrays and allow such simultaneous observations toNotice that, the missions which have already flown have be made.proved to be fruitful, but the ones considered for flight inthe 2015+ timeframe require significant breakthroughs in Mi ==\metrology and precision control to reach the minimum Emission targets.5 While decades of theoretical as well aspractical experience exist on navigation and control ofsingle spacecraft, the dynamics of the multiple spacecraftmissions are much less well-understood. In such a mission,the focus is not on estimating and controlling the "absolutetrajectory" of the individual spacecraft but on establishingand maintaining certain geometry between each spacecraft. (iAn example in point is the NASA/ESA mission LISA,involving three spacecraft flying approximately 5 million Xkilometers apart in an equilateral triangle formation [15]. E E
As a result, "relative navigation" accuracy requirements _are almost always much more stringent than those of TeaS: 1"absolute navigation". Therefore, the relative navigation ,I, X S Gx,i; ;n
Ealgorithms running on-board and at the groundstation have ~ XU OA GAEDRI IA~
to be tuned to satisfy these accuracy requirements. As such, I km 100k km 101!3kwe identify five main classes of technology drivers and
* * * ~~~~~6Relati\re Distancechallenges from navigation and control perspective acrossthe missions illustrated in Table 1. These classes are: Fig. 1 Classification of scientific objectives across
formation keeping accuracy and the formation sizes.
(a) relative navigation and attitude sensing, Using this InSAR example, we will enumerate the above
(c) fleetlevel control andcoordinationmechanisms five drivers and challenges (i.e., the relative positioning,(c) intevecrand co mmunation e nismsn attitude sensing requirements, etc...) across the heightd) inter-spacecraft communications enabling resolution of the obtained images. This sensitivity analysis
(e) on-board intelligence and fault-tolerance. provides the challenge for the future missions from dynamicmodeling, navigation and control perspective.
5See [14] for a longer list of such missions.6 Other technology challenges are typically tied to thepayload and bus hardware sizing and selection.
505
![Page 4: [IEEE 2007 3rd International Conference on Recent Advances in Space Technologies - Istanbul, Turkey (2007.06.14-2007.06.16)] 2007 3rd International Conference on Recent Advances in](https://reader030.pdfslide.net/reader030/viewer/2022020407/575082661a28abf34f998730/html5/page/4.jpg)
A. Typical Mission Case Study: InSAR (Bistatic) ah PA tan0 = A tn(Sp-a sin Sp (° < op - a < T)
For InSAR observations, a number of techniques have aB Bbeen developed based on the temporal or spatial separationbetween the receivers which serve different purposes. Along We use this basic analysis to enumerate he rbaselineTrack Interferometry (ATI) uses antennas displaced along accuracies required for desired vertical image resolutions.the velocity track aiming to detect relatively fast motion,such as cars or ocean currents - depending on the separation i.Relative navigation accuracy and correlations withdistance. Repeat Track Interferometry (RTI) uses two dynamicmodeling and control accuracymeasurements taken as the host vehicle repeats the firstflight track exactly for determination of very slow motion, Considering the nominal values for a typical scenario [22]such as glacier movement, geological movement after correspondingto a 1 km effective baseline length, 300 as theearthquakes (using differential InSAR), and lastly Cross- radar look angle, 100 as the tilt angle and 520 km as theTrack Interferometry (CTI) uses antennas displaced across spacecraft altitude7, we observe that the height resolutionthe flight path for topographic mapping (e.g. crop growth changes on an 1:100 scale with baseline accuracy.tracking, pipeline monitoring, surface depression, Specifically, meter level topographic height resolutionhydrology, geology, etc.). Extensive description is available accuracy requires centimeter level relative positioningfrom [18], [19] and [20]. knowledge, though control accuracy criteria are much less
stringent. This requirement is a direct requirement onrelative positioning knowledge (i.e. relative navigationsolution accuracy).
Notice that, for to obtain this accuracy one doesn'tnecessarily need dynamic modeling or control accuracy at
Ho X hi-ithis level. The above analysis is a requirement onknowledge rather than control. However, as illustrated in theliterature, relative navigation solutions [10] are directlyaffected by the relative dynamics modeling accuracy.
\--j Relative navigation algorithms process the high-precisionrelative position and velocity measurements within a"relative orbit estimator" framework, which uses
Fig.2 InSAR geometry mathematical models of the relative motion to propagate theWe will focus on Bi-Multi static CTI as our example to states. The estimated relative orbits can then be manipulated
drive relative navigation, modeling and control accuracy via control algorithms. The orbit estimations provide the
requirements. References [19], [20] and most recently [21] navigation baseline solution which determines the relativegive a derivation of the relation between baseline accuracy navigation accuracy.and topographical height accuracy using geometricreasoning. We will not repeat the derivation here but will For higheracurc t of ath montioonly give the resulting relation and an accompanying graph shouldinclude the effect of as many forces acing on theshw in Fig. fr ilusraio of or proe. HeeGs satellite as possible. The un-modelled effects build up andsheowne standaig2forddvilation ofh rour,prpoes. the yheigt render the solution unusable in the long run. In reality, thisthe one standard deviation of height error, Hp is the height is limited by the complexity of the solution and available
baseline length, O ois the radar look angle, rcis the tilt angle processing power. As an indicator to the balance betweenbasetwnelengthespace erafan l is theo sa r dation force model and accuracy, [23] compared the effect ofbetwen he paccrat ad CB i th on stndad dviaion including various number of geopotentials in the relativeof baseline error. The geometry results in standard deviation mn ggod e relie sg otnhd n the fully-. . . ~~~~~~~~~~~~~motionmodel. The method relies on differencing the fullyof height error as : non-linear absolute trajectories via a high-precision
numerical integrator. For this example with a formation at
-l H tan(O~ - cY)tanOPul initially km level separation, a J2 only model results in aaTh - - tBanv -af tan 0p (TB
Looking at thesensitivityofheightaccuracyversusthPlease note that this is for illustration purposes only andbaseline accuacywheseeyhow thebaseinetaccuracy affectstexplores only the relationship between the baseline and thebaseline accuracy, we see how the baseline accuracy affects hegtacry.Smohrfcosabutessemhulth higtreoltin height accuracy. Some other factors about the system should
be taken into account for a comprehensive error budget. SeeMoccia, Chiacchi and Capone '00 for a more completediscussion.
506
![Page 5: [IEEE 2007 3rd International Conference on Recent Advances in Space Technologies - Istanbul, Turkey (2007.06.14-2007.06.16)] 2007 3rd International Conference on Recent Advances in](https://reader030.pdfslide.net/reader030/viewer/2022020407/575082661a28abf34f998730/html5/page/5.jpg)
relative positioning error of 10m by the end of the first day, very helpful once the computational power barrier iswhereas using 20 terms in the geopotential, it is possible to overcome. The requirement is presented by [31] in todaystay within a 1 meter error radius even after 5 days. [23] As terms as 1011 bytes of memory and 1012 Flops to obtain evensuch, the control effectiveness and the mission life is also a 1 meter space borne SAR resolution - a computationallystrong function of relative dynamic modeling [33]. The intensive requirement considering the expectations toexisting trend in the controls literature suggest that the obtain centimeter level accuracy.relative navigation solution accuracy requirements translateon the same order of magnitude scale to dynamic modeling v. Future systems: Multistatic SAR and formationand controls accuracy . architectures
We conclude with an upcoming missions plan to achieve Sensor Webs [28] are an up and coming concept forthe proposed DTED-3 specification which expects a vertical integration of future sensing systems. This concept entailsresolution of 2-4 m from a topographic mapping perspective sharing of processed signals obtained by each node and[22]. With the proposed DTED-5 standard calling for a subsequent use of resulting information as an input for thevertical resolution of only 5 cm, the baseline accuracy autonomous operation of the system [29]. This can beshould be much better than 0.5 mm considering the other considered a very large scale distributed data fusion andsources of error in addition to the baseline - an requires a significant amount of on-board processing of rawundemonstrated level (in space) of relative navigation data before sharing it in the system. The possible inclusionsolution accuracyforfree-flying spacecraftformation. in the sensor web of formation flying multi-static InSAR
with other nodes which combine optical and SAR sensorsii. Attitude control accuracy with on-board local data fusion would be a natural
progression for current systems. This is illustrated in Fig. 3.We consider the RTI case in terms of attitude control
accuracy requirements for SAR image correlation. Notethat, RTI-motion mapping requirements are directlydetermined by the sensitivity of the repeat pass, which canbe translated into attitude accuracy. Notice that the samecase will be applicable to CTI examples. We project from =reference [18] that a sensor at 500 km would have a criticalbaseline of around 1.6 which translates to about 0.17degrees. This requirement seems feasible by today'sstandards.
iii. Time synchronization accuracyFig. 3 On-board vs ground processing architecture diagramTime synchronization of images from different aperture
points play an important role for interferometric studies. In light of these discussion, to act as an initial road mapReference [25] recommends a stability of 2.5 x 10-12 for a typical formation flying mission, we have mappedseconds for typical InSAR systems which can be covered by these key prerequisite technologies (both from a hardwarestate of the art atomic clocks [26]. Synchronizing these and software level) across stage-by-stage developmentclocks on a periodic basis would provide the necessary time matrix. The roadmap demonstrates not only the need forsynchronization of measurement. extensive on-ground testing and verification via test-beds,
but also illustrates a strategy for a frequent andiV. On-board processing uninterrupted parallel ladders of piggy-back technology
demonstration missions to space-mature these technologiesOn-board processing of sensor data [31] 8 iS crucial in aprogressive fashion.
from an autonomy perspective since next generationsystems should be able to identify relevant targets and III. ROAD MAP FOR TECHNOLOGY DEVELOPMENTorganize their subsequent imaging objectives without AND DEMONSTRATION MATRIXcontinuous ground intervention. Some initial steps havebeen taken in this area [27]. The significant body of As explained in the previous sections, distributedresearch in signal processing and vehicle autonomy will be spacecraft systems have the potential to enable new
missions concepts as well as increasing the performance of8 existing ones while cutting the costs. However, despite[31] suggest that low resolution SAR (er-level)sis many proposals within the last decade, a distributed fleet ofpossible today, but high resolution looks really impossible high precision formation flying mission has yet to be testedeven in the future given the excessive need for on-board in space. Financial as well as political concerns andcomputation and memory requirements
507
![Page 6: [IEEE 2007 3rd International Conference on Recent Advances in Space Technologies - Istanbul, Turkey (2007.06.14-2007.06.16)] 2007 3rd International Conference on Recent Advances in](https://reader030.pdfslide.net/reader030/viewer/2022020407/575082661a28abf34f998730/html5/page/6.jpg)
ambitious mission designs that attempt to test several novel relative navigation accuracy.concepts simultaneously, with high performancerequirements led to the cancellation of several missions 2e) Development of a hardware setup to simulate a(such as TechSat2l[30]). distributed radar system in space (using boom or blimp
mounted antennae).While it is true that certain areas of technological
infrastructure for such a mission are less developed than 2f) Design and launch of a second technologyothers (particularly those related to payloads), we believe demonstration mission to test newer technologies inthat the technologies that are necessary to build the communications, navigation and control.platforms themselves are mature enough for spacequalification. These technologies are identified as inter- 3) Long-term targets (1O years)satellite communications, relative navigation and controltechniques, distributed autonomy and propulsion. Once the 3a) Production and launch of the first distributed radarplatforms and the communications and control technologies demonstration mission.are proven in small-scale, low cost and lower risk missions,full scale in-orbit payload tests can begin. 3b) Production and launch of a multiple satellite mission to
test control architecture and strategies such as collisionThe road map we envisage for the development of the avoidance, balanced propellant usage and fault tolerance.
distributed spacecraft systems can be divided into threestages, each with different time windows: Our current work focuses on solidifying this initial approach
to a full development matrix.1) Short-term targets (1-2 years)
IV. CONCLUSIONSla) Design of Hardware-in-the-loop setups to test state-of-
the-art relative navigation and control technologies, to get a We have identified several key drivers for multi-more realistic picture of the current capabilities and assess spacecraft system architectures based on the typicalwhich algorithms and methods are more promising. At this mission/science needs and analyzed how these driversstage, there is no optimality constraint on the control translate to both spacecraft fleet design and inter-spacecraftalgorithms; the focus is firmly on simplicity. navigation, control, communication requirements. The
analysis show that (a) high-precision cross-navigation andlb) Analysis of inter-satellite communications problems attitude sensing, (b) high fidelity relative motion dynamicand existing protocols for high-precision formation flying. modeling (c) fleet level efficient control and coordination
mechanisms (d) reliable and continuous inter-spacecraft1c) Analysis of radar and in particular clock- communications enabling direct interoperation and tightsynchronization problems as applied to formation flying time-synchronization, (e) on-board fault-tolerance andplatforms. autonomy, will all have distinct impacts in many of the
envisioned projects, and will play an important role in theId) Conceptual study of a simple, low-cost and low-risk success and progression of the next generation systems.
two-satellite formation flying mission to assess whichtechnologies are the likely candidates for space-qualification It is also important to note that TUBITAK-UZAY and(e.g. propulsion system, inter-satellite link protocols, COTS I.T.U. Faculty of Aeronautics and Astronautics have specialcomponents) interest in formation flying concepts. It is intended that the
ideas and methods presented in this paper will form the2) Intermediate-term targets (5-6years) basis of the practical work for near future distributed
spacecraft system projects some of which can be realized2a) Production and launch of the first demonstration with relatively small budgets.
mission, based on the conceptual study. ACKNOWLEDGMENT
2b) In-orbit test and evaluation of various control A part of this work is funded by TUBITAK (Thealgorithms. Scientific and Technological Council of Turkey) under
I.T.U. Grant : Design and Manufacture of a Pico-Satellite,2c) Development and on-ground testing of control Grant no: 106M082.algorithms with more emphasis on optimality as well as the REFERENCESability to handle a large number of satellites. [1] Matsumoto, H.,"Research on solar power satellites and microwave
power transmission in Japan," IEEE Microwave Magazine, 2002, vol.2d) Investigation of hardware implementation of relative 3, no. 4 pp. 36- 45
navigation unit, to increase available processor power and [2] Huang, J., Lou, M., Feria, A. and Kim, Y., "An inflatable L-bandmicrostrip SAR array,"IEEE Antennas and Propagation Society
508
![Page 7: [IEEE 2007 3rd International Conference on Recent Advances in Space Technologies - Istanbul, Turkey (2007.06.14-2007.06.16)] 2007 3rd International Conference on Recent Advances in](https://reader030.pdfslide.net/reader030/viewer/2022020407/575082661a28abf34f998730/html5/page/7.jpg)
International Symposium, Atlanta, GA, USA, 1998 [26] Francis, S. et al., "Analytical tools for clocks in space," Proceedings[3] Freeland, R. E., Bilyeu, G. D., Veal, G. R., Steine, M. D. and Carson, of the IEEE International Frequency Control Symposium and PDA
D. E., "Large Inflatable Deployable Antenna Flight Experiment Exhibition, 2003Results", 92-0301, Technology Experiment Program," IAF-97-1.3.01, [27] Sherwood, R.L., Chien, S., Castano, R. and Rabideau, G., "Spacecraft48th Congress of the International Astronautical Federation, 1997 autonomy using onboard processing for a SAR constellation mission,"
[4] http://www.mae.cornell.edu/ncmrs ISPRS Commission I Mid-Term Symposium, Denver, CO, 2002[5] Gurevich, G. and Wertz, J.R., "Autonomous On-board Orbit Control: [28] http://sensorwebs.jpl.nasa.gov/[6] Flight Results and Cost Reduction", JHU/APL Symposium on [29] Delin K. A. and Jackson S. P., "The Sensor Web: A New Instrument
Autonomous Ground Systems for 2001 and Beyond , Laurel, Concept," SPIE Symposium on Integrated Optics, San Jose, CA, 2001Maryland, 2001 [30] Chien S. et al., "The EO-1 Autonomous Science Agent", The 3rd
[7] Folta, D. and Quinn, D., "Enhanced Formation Flying for the Earth international joint conference on Autonomous Agents & Multi AgentObserving-I (EO-1) New Millennium Mission" NASA Flight Systems, 2004, pp.420-427Mechanics Symposium, pp.405-406, 1997 [31] Keydel, W., "Perspectives and visions for future SAR systems,"IEE
[8] Inalhan, G., Tillerson, M. and How, J. P., "Relative Dynamics and Proceedings on Radar and Sonar Navigation, 2003, vol. 150, no. 3,Control of Spacecraft Formations in Eccentric Orbits" Journal of pp. 97-103Guidance, Control, and Dynamics 2002, vol.25 no.1 pp. 48-59 [32] Bauer, F. et al., "Satellite formation flying using an innovative
[9] Gim, D. W. and Alfriend, K. T., "The state transition matrix for autonomous control system (AutoCon) environment," AIAArelative motion of formation flying satellites," Advances in the Guidance, Navigation, and Control Conference, 1997, pp.657-666Astronautical Sciences. Vol. 112, Part 2, pp. 1021-1041. 2002 [33] Inalhan, G., Tillerson, M. and How, J. P., "Coordination and Control
[10] Inalhan, G., Busse, J. and How, J., "Precise formation flying control of Distributed Spacecraft Systems Using Convex Optimizationof multiple spacecraft using carrier-phase differential GPS," In Proc. Techniques," International Journal of Robust and Nonlinear Control,Guidance, Control and Navigation Conference, number AAS 00-109, vol 12, Issue 2-3, Feb.-Mar. 2002, pp.207-242.2000.
[11] Imre E., Palmer, P. and Hashida Y., "Precise Relative OrbitDetermination of Low Earth Orbit Formation Flights Using GPSPseudorange and Carrier-Phase Measurements", SSC02-IV-1, 16thAnnual AIAA/USU Conference on Small Satellites, 2002
[12] Bernard, D. et al., "Spacecraft autonomy flight experience - The DS1Remote Agent Experiment," AIAA- 1999-4512, AIAA SpaceTechnology Conference and Exposition, Albuquerque, NM, Sept. 28-30, 1999
[13] Scharf D., Hadaegh F. and Ploen S., "A Survey of SpacecraftFormation Flying Guidance and Control (Part I): guidance,"Proceedings of the American Control Conference, pp. 1733- 1739,2003
[14] Scharf D., Hadaegh F. and Ploen S., "A Survey of SpacecraftFormation Flying Guidance and Control (Part II): control,"Proceedings of the American Control Conference, Boston, MA, 2004
[15] Leitner, J., "A hardware-in-the-loop testbed for spacecraft formationflying applications," Proceedings of the IEEE Aerospace Conference,2001, vol. 2, pp. 615-620
[16] Vitale, S. et al., "LISA and its in-flight test precursor SMART-2,"Nuclear Physics B - Proceedings Supplements,vol. 110, July 2002,Pages 209-216
[17] Elachi, C., Bicknell, T., Jordan, R.L. and Wu C., "Spacebornesynthetic-aperture imaging radars: Applications, techniques, andtechnology" Proceedings of the IEEE, 1982, vol. 70, no. 10, pp.1 174-1209
[18] Rosen, P.A. et al., "Synthetic Aperture Radar Interferometry,"Proceedings of the IEEE, 2000, vol. 88, no. 3, pp.333-382
[19] Rodriguez, E. and Martin, J.M., "Theory and design of interferometricsynthetic aperture radars," Proceedings of the IEE on Radar andSignal Processing, 1992, vol. 139, no. 2 pp. 147-159
[20] Zebker, H. A. and Goldstein, R. M., "Topographic mapping frominterferometer synthetic aperture radar observations," Journal ofGeophysical Research, 1986, vol. 91, no. B5, pp. 4993-5000
[21] Kohlhase, A. O., Kroes, R. and D'Amico, S., "InterferometricBaseline Performance Estimations for Multistatic Synthetic ApertureRadar Configurations Derived from GRACE GPS Observations,"Journal of Geodesy, 2006, vol. 80, no. 1, pp.28-39
[22] Moreira, A. et al., "TanDEM-X: a TerraSAR-X add-on satellite forsingle-pass SAR interferometry," IEEE International Geoscience andRemote Sensing Symposium, 2004, pp. 1000-1003
[23] Imre, E., "High Precision Relative Motion Modelling," Phd Thesis,University of Surrey, 2006
[24] Moccia, A., Chiacchio, N. and Capone A., "Spaceborne bistaticSynthetic Aperture Radar for remote sensing applications,"International Journal of Remote Sensing, 2000, vol. 21, no. 18,pp.3395-3414
[25] Weiss, M., "Synchronisation of Bistatic Radar Systems," IEEEInternational Geoscience and Remote Sensing Symposium,Anchorage, Alaska, 2004
509