Embed Size (px)
Citation preview
![Page 1: [IEEE 2007 IEEE Radar Conference - Waltham, MA, USA (2007.04.17-2007.04.20)] 2007 IEEE Radar Conference - Enhancing GMTI Performance in Non-Stationary Clutter Using 3D STAP](https://reader035.pdfslide.net/reader035/viewer/2022073023/5750a7f41a28abcf0cc4f085/html5/thumbnails/1.jpg)
Enhancing GMTI Performance in Non-StationaryClutter Using 3D STAP
Phillip M. Corbell, Jimmie J. Perez, and Muralidhar Rangaswamy
Air Force Research LaboratorySensors Directorate, Electromagnetics Technology Division
Electromagnetic Scattering Branch80 Scott Dr., Hanscom AFB, MA 01731, USA
e-mail: [email protected]
Abstract- In side-looking Ground Moving Target Indication in the clutter returns over the range swath of interest [3],(GMTI) radar, the 2-Dimensional (2D) Space Time (azimuth- [4]. This results in elevation-dependent clutter statistics whichDoppler) domain can adequately define a clutter spectrum which has a deleterious impact on classical STAP performance. Thisis accurate for all range gates. However, in applications where thearray boresight is not perpendicular to the velocity vector (e.g. problem ls particularly acute for close-in sensig geometriesforward-looking radar), the azimuth-Doppler clutter spectrum due to the elevation diversity that exists across short sensingexhibits a dependence on elevation angle-of-arrival, creating baselines.range-varying (but elevation-dependent) clutter statistics, or non- Rejecting interference using STAP typically involves "aver-stationary clutter. Classical Space Time Adaptive Processing aging" many presumably target-free range samples to estimate(STAP) algorithms suffer substantial performance losses in non-stationary clutter since classical STAP assumes clutter station- clutter statistics, (i.e. spectral shape and location). The result-arity along the range (training) dimension. Planar arrays are ing interference covariance estimate is then used to synthesizeinherently able to observe the azimuth-Doppler clutter spectrum an adaptive (via the covariance estimate) space-time (2D) filteras a function of the elevation angle, a capability which linear to remove interference from a particular Rangecell Under Testarrays lack. The incorporation of the planar array's vertical (RUT). Thus, having elevation-dependent (i.e., non-stationary)dimension into the joint azimuth-Doppler (2D) STAP domain . '. .in a
has previously resulted in 3D STAP. This paper demonstrates the clutter statistc s in a "blurred" 2D clutter covarianceability of 3D STAP to solve the non-stationary clutter problem estimate which is inaccurate for any one particular rangeby accounting for the elevation-dependent clutter statistics in gate. This poor estimate of the space-time (2D) interferencea 3D covariance matrix. A forward-looking array is used to covariance matrix is correspondingly responsible for poorprovide non-stationary clutter, and the performance of 2D and STAP performance. Therefore, methods that compensate for3D versions of the Adaptive Matched Filter (AMF) and Joint non-stationarity Training Data (TD) are needed to regainDomain Localized (JDL) are used in a close-in sensing paradigm. pormanceeThe results show a >55 dB improvement in output SINR near performancethe clutter null using 3D STAP algorithms in lieu of 2D STAP In the STAP literature, elevation-dependent clutter is of-algorithms applied to the same (subarrayed) data. ten described as heterogeneous clutter [5], range-dependent
clutter [3], [4], or non-stationary clutter [6], [7]. For theI. INTRODUCTION purposes of this paper we use the non-stationary terminology,
Close-in sensing has been suggested for improving surveil- to highlight the geometrical (elevation) dependence of thelance in urban warfare environments where buildings and clutter statistics vs. other types of clutter heterogeneity causedinfrastructure hinder target detection and tracking from long- by non-uniform terrain, urban environments, etc.range sensing platforms. Small, highly maneuverable airborne This paper proposes to address the elevation-dependentplatforms operated in and around these urban "canyons" could clutter statistics using an elevation-aware sensor: the planarbe used to provide all-weather, day-or-night surveillance using array. While planar arrays are sometimes used in the GMTI-short-range Ground Moving Target Indication (GMTI) radars. STAP community, the planar array is often subarrayed into anThese airborne sensing platforms would likely benefit from equivalent linear array prior to adaptive (STAP) processing.a forward-looking array radar, and some have advocated the In recent years, the vertical dimension of the planar array hasuse of Space Time Adaptive Processing (STAP) for providing been incorporated into the STAP algorithm, resulting in 3-interference rejection under such conditions [1], [2]. However, Dimensional (3D) STAP. Research on 3D STAP has mainlyachieving sufficient clutter mitigation with a forward-looking focused on nulling range ambiguous clutter returns in Airbornearray is achallenging taskfroma STAP perspective, especially Moving Target Indication (AMTI) and GMTI applicationswhen employed in a close-in sensing paradigm. in both side-looking [8]-[10] and forward-looking [11], [12]
It is well known that airborne radar arrays oriented any scenarios. Note, the term "3D STAP" has been used elsewheredirection other than orthogonal to the velocity vector cause in the literature with different meanings, and is to be dif-an elevation (or range) dependent angle-Doppler relationship ferentiated from the same term used to describe the addition
1-4244-0284-0/07/$20.00 ©2007 IEEE 647
![Page 2: [IEEE 2007 IEEE Radar Conference - Waltham, MA, USA (2007.04.17-2007.04.20)] 2007 IEEE Radar Conference - Enhancing GMTI Performance in Non-Stationary Clutter Using 3D STAP](https://reader035.pdfslide.net/reader035/viewer/2022073023/5750a7f41a28abcf0cc4f085/html5/thumbnails/2.jpg)
of "fast-time" Degrees Of Freedom (DOF) to traditional 2DSTAP algorithms for mitigating hot clutter [13], [14]. Thework herein evaluates the ability of 3D STAP techniques 02 2to ameliorate the geometrically-induced non-stationary TD -0,3
-0 4. O4.problem, a concept briefly explored in [2], [15].This paper extends the work of [15] by exploring the
O >h . . - ' - ~~0 5 0 - f i--- -...-D5
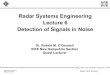
tradeoff between the increased TD and computational require-ments due to elevation DOF in 3D STAP vs. the improvedperformance of 3D STAP over 2D STAP in the presence of Fig. 1. Side-Looking Clutter Fig. 2. Forward-Lookingnon-stationary TD. A forward-looking GMTI radar scenario is location in terms of normal- Clutter location in termssimulated to provide the non-stationary TD. The Output SINR ized Doppler (W), Horizontal of normalized Doppler (W),performance of 2D and 3D Joint-Domain Localized (JDL) and Spatial Frequency (t<), and Horizontal Spatial FrequencyAdaptive Matched Filter (AMF) STAP processors operating on Vertical Spatial Frequency (t<), and Vertical Spatialthe same planar array data is compared and analyzed. The 2D (i). Frequency (tz).STAP algorithms are evaluated by first subarray beamformingthe planar array data in the vertical dimension. The optimum2D and 3D STAP Matched Filters are also provided to bound (VSF), which is directly related to the elevation angle-of-performance. arrival. To illustrate, compare the clutter domain [4], [15] for
II. ELEVATION DEPENDENT ANGLE-DOPPLER the side-looking orientation in Fig. 1 with the forward-lookingorientation in Fig. 2, as a function of the joint normalizedCOMPENSATION Doppler (a), normalized HSF (t9 (0, q)), and normalized VSF
The problem of non-stationary clutter occurs in many appli- ( z(0)).cations of interest beyond forwarding-looking STAP, including Figure 1 shows the 3D Q 1 clutter ridge for the side-bistatic/multistatic STAP radar, space-based GMTI (STAP) looking orientation as a function of the normalized Doppler,radar, and maneuvering radar. Many solutions to this problem HSF, and VSF domains. Note that the linear relationship be-have been suggested in the literature [6], [7], [16]-[21]. One tween normalized Doppler and normalized HSF is maintainedsimple, popular approach to mitigating non-stationary clutter is and independent of VSF in the side-looking case.to use reduced DOF STAP algorithms that require less sample Figure 2 illustrates the Q = 1 clutter domain for a forward-support. This has the effect of minimizing the non-stationarity looking array [2], [4]. This clutter "bowl" clearly exhibits aof the TD set, which can result in improved performance [3]. VSF (elevation) dependent clutter "location" in the normalizedAn example of this is illustrated through the 2D JDL results Doppler-HSF (U-t<) plane. Thus, by contrast to the side-in Fig. 7. looking case, the optimal STAP filter for the forward-lookingMost other solutions to the non-stationary TD problem case must exhibit a clutter null which changes both shape and
largely fall into a category known as angle-Doppler compen- location as a function of elevation angle (i.e., range gate). Thesation techniques [16], [18], [21]-[24]. Generally speaking, required shape and location for optimal STAP nulls appear asthese methods transform the TD such that the angle-Doppler the projected contour lines in Fig. 1 and Fig. 2.spectrum (i.e., clutter ridge) of individual TD samples bettermatches the clutter spectrum of the RUT. More will be said IV. SIMULATION MODELS AND PERFORMANCE METRICSabout these techniques in the results section. The 3D clutter models and STAP processors employedA few authors have explored the use of planar arrays and are based on the planar array development in [8] which is
3D STAP to address the problem of non-stationary clutter [1], an extension of the linear array development in [25]. Each[2], [11], [12], [15]. Richardson was perhaps the first author individual range bin is independently modeled, to capture theto suggest using a planar (sub-arrayed circular) array to detect elevation-specific clutter statistics of each range bin. The 2Dslow-moving targets specifically by employing elevation diver- AMF and JDL algorithms are also described in [25].sity [4], and noted that this approach is particularly necessary The performance metric used here is the Output SINR,for detecting targets at steep grazing angles. This paper extends which can be written asand expands this body of research, exploring more processors Ht,72 w 2and explaining how 3D STAP achieves improved performance Output SINR wH (1)over 2D STAP in non-stationary clutter environments.
where (t is the target signal-to-noise ratio, u2 is the noiseIII. ELEVATION DEPENDENT CLUTTER COMPENSATION power, v is the target's space-time steering vector, and R is
USING PLANAR ARRAYS the clairvoyant interference matrix. The output range of thisIn other than side-looking, zero crab angle geometries, the metric is thus dependent on the received target power, which is
training data non-stationarity is due to the changing relation- set equal to an arbitrary value of 1 at the target range (receivingship of the clutter Doppler (fd) and Horizontal Spatial Fre- mainbeam gain) of6 kin,and isvaried over range as afunctionquency (HSF) as a function of the Vertical Spatial Frequency of the illumination pattern. The maximum achievable output
648
![Page 3: [IEEE 2007 IEEE Radar Conference - Waltham, MA, USA (2007.04.17-2007.04.20)] 2007 IEEE Radar Conference - Enhancing GMTI Performance in Non-Stationary Clutter Using 3D STAP](https://reader035.pdfslide.net/reader035/viewer/2022073023/5750a7f41a28abcf0cc4f085/html5/thumbnails/3.jpg)
TABLE I 60SIMULATION PARAMETERS. 2
Variable 2D Scenario 3D Scenario 5P (Vert. channels)1 (8 el. subarray) 8~~~~~~~~~~~~~~~~~~~~~~~.....N (Horiz. channels) 8 same 40~~~~~~~~~~~~~~~~~~~~~~~~.........1(pulses in CPI) same~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~....f~~~~~ (carrier frequency) 1240 MHz same~~~~~~~~~~~~~~~~~~~~~.....
f~~~~~ (pulse repetition freq.) 1984 Hz same ~~~~~~~~~~~~~~~~~~....... .30...(pulsewidth)0.4 ps same~ ~~~~~~~~~~~~~~~~~~~~~~~~~~~~........ ........ ........ ........ ........ ........ ...P~~~~~~~~ (transmit power) 1.0 kW same~ ~~ ~~~~~~~~~~~~~~~~~~~~........ ......... ......... .......... ......... ........ ....(bandwidth)2.5 M Hz same 20~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~........ ......... .......... .......... .......... ......... .....ha (aircraft altitude) 3073 sam e~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~.......... .................... .......... .......... .......... ......j3 (clutter ridge slope) same~~~~~~~~~~~~~~~~~~~~~~~~~........... HHHHH~c/~~~~~~~~~~~~~tx (transm it az) deg sam 10~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~........... ........... ............ ............ ........... ........... ........
Otx(transmitel)-30.8 deg same~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~............ ............ ............ ............ ............. ........... ........ft (target range) km same~ ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~............ ............. ............. ............. ............. ............ .........(cl tert gham al) .s 8............ .5..ElementPatternCosinesame Doppler(normalized)~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~....................................................................Element Gain dB same~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~............. ............................ ............................ ............ ..........Element Backlobe Atten. -90 dB same~~~~~~~~~~~~~~~~~~~~~...
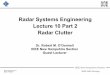
d~~ (vert. elementspacing)c/ (2fo) m same Fig. 3. Output SINR of the optimal 2D or 3D STAP.... Matched.. ...Filter ..(MF)(available range bins) 1000 same rangeof 6km (~~~~~~~~~~~~~~~~~~....... ........ ......... .........0........el.)...
JDL-2 Bins (az el Dopp) 5x1x5 (25 DOF) 5x5x5 (125 DOF)AMF Training Data (TD) 128 1000~~~~~~~~~~~~~~~~~~~~~~~~~~~~~........
th4lterrde indicating... the....... elevation.... dependent...mainbeam.SINR is equal to the maximum noise-only performance, which clutter Doppler, a.k.a. the Doppler of the ground return at each~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~.................... .................. ................... ....................................... ................
issynonymouswiththesystemintegrationgain(NMP=8~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~), Figure4 providesthesameinformation..............as.................Fig................. 3,...............but......is....now...in Hthis chasnelaots71) B Ti vauerersaent h pe lte s elevation angle.rathe. than.rang. Contrasting.............Figs......3boundonallOutputSINRresults.TheOutputSINR metricand4highlights importantrealizations relatingtoforward-~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~.....................................................................................................................is used to call attention to the non-uniform illumination of the looking STAP applied to close-in sensing. large portion..........
and use3D nST PIpefrace i h sameenvironment........and....
seen aromTbi.eaamtr valuesy)24 were saeletdt rvd 1
som lep rameterso areqsiila to8 tHos u sedinte MC RM -0
3D (uscenaisw itht hearray clms sub arra ed vericll t
13(lth erMatched Fltper (MF prvdeshapromane.bound..-4using (rnmthelaroyat 0cvaran egmarx at mea rag1bn 0
Rthe raw tiantegrto gani thksm e inbtsases Sicethop (cutima STaPmapefomac is caclte seange bi w ih -0.5 0 0.5Eexissnt Pattsingl elvt on), ite elvtin adatiiye f DDoppler (normalized)STAeofersGano pefrac gai ovrth aDmFeotmm
resulets.Figuren3 givesng the output SIN a samfntoe o ag Fig. 4. Output SINR of the optimal 2D or 3D STAP Matched Filter (MF)Tand miDoTpp er.Tehrzna lniner (of negrad atinimueteh as a function of range bind eoplevaio TetandsDpper Results hteredtar id rentia
iLumvination patterbnselevtio nulbew ent emaneaandtgtoe potte in Fig0.8 3,btpotels.lvainisea)frneJDL-I Bns (z xel xDop) R0 (9DOF 300 (264OF
![Page 4: [IEEE 2007 IEEE Radar Conference - Waltham, MA, USA (2007.04.17-2007.04.20)] 2007 IEEE Radar Conference - Enhancing GMTI Performance in Non-Stationary Clutter Using 3D STAP](https://reader035.pdfslide.net/reader035/viewer/2022073023/5750a7f41a28abcf0cc4f085/html5/thumbnails/4.jpg)
-5~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~....... ........ ......... ......... .......... .......
-15~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~.................... ..................................................-20~ ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~........... ........... ............. ............. ............. ............ .......
~~~~~~~~~~~~~~~~~~~~ -25 ~~~~~~~~~~~~~~~~~~~... ...... ...... ....... ... .........~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -30~ ~~ ~~ ~~ ~~ ~~ ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~............. ............................... ................ ................ ............... ...........0~ ~~ ~~ ~~ ~~ ~~ ~~ ~~ ~~~ ~~~ ~~~ ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~........ ..............
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -35~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~.............. ................................0j~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~........-40 -40~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~......-45 -45~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~..............................................
-50 -50~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~........-55~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~............................................. ......
-0.50 0.5 -0.5 0 0.5~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~....... ......................Doppler (normalized) Doppler(normalized)~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~................................. ................... ..
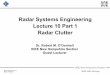
Fig. 5. Output SINR of the 2D Adaptive Matched Filter (AMF) plotted as a Fig. 6. Output SINR of the 3D AMF plotted as a function of..........range............ ................binfunction ofrangebinelevationand Doppler. Sliding window results use 128 elevation and Doppler. Sliding window results use 1000 (<2MNP1024)...............
smallregionofelevation.Thiscomparisonalsoillustratesthe~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~....................................................fact that the clutter ridge location (and with it the clutter AMF compared to the 2D AMFis...........55.dB.higher..near.the..clutter
statistics) is more aptly described as elevation dependent vs. null (0.4 normalized Doppler) at the target range/elevation..........rangedependent. (6kmI-30.80),illustratinga clear improvementinMinimum~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~.........................................Discernable Velocity (MDV)~~~~~~...Not.alo.hat999rage.in
B.5Esiae-oaiac eut r usdt5 aclt h siae oainefrec agResults using............a..sliding.window.estimated.covariance..matrix.bin,.which.is.25.samples ..shy.of.Reed'srule.amount.for.aarecalcuated for he Adaptie MatchedFilter (AF) and 51 DOF........AMF....... Each.STAP filter........... makes............. use..of.all..the.TDpartially adaptive.. JontDoan.oclie.(DL.SA.pocs- aaiabe .dmostain.tatte.leato.dvesiyafore
sos h aiu valbeT2ntesiuainws10 by0th lnraryealsprorac yia fsainrbis h apl2upr5o te2 n D dpie tanigdt thghdpeso2age5ihu teueo nrang anl-ope opnaintehius D srmral
Matched Filter (AMF) was twice the 2D DOF (128 range~~~bins)and nerytiete3 O 10 rnebn)rsetvl 3mroe0 vrtelnaie ray(DSA)rslsi hs
(se Tal ).Asiigwno a sdt aclt h ag el thg lvto nlsAMF an D uptSN efrmnemti vrte10 Whnapidt-o-sainr3riig5aa nl-operag issmltdwie lasslcigteT fro the copnaio ehiqe 6,[7,[6-[11aeloberang bins ..nearest (btnticuig h RnebnUdr sont4 sbtnilyipoeupnteucmestd2Test(RUT). AMF erformance. Eachcompensation tecnique.offers.im
-45 -45~~~~~~~~~~rvdprfrac ta nrae omuainlcot ntiC. AdptivMatced Flter(AMF)Resuts snse, D STP offrs yt anther etho forachieing ette
The ouptSN fte2 M rcso i ie5npromnea nraedcmuainlcs.Te"ot"oFig.5.Even with a relatively~~.. shr.siig.ido.f12.D.TPar.ncesd.opuaina.ure.ncredforangebinsthe impact of.......th.o-tainr.T.scerl.v- th.de.leainDO.swlla. adar.ot ascae
thesample support isotwierteDFi oognoscutr performancedwithpalfractin ofmathedcmuainl)udn n
Ab..Outut81I%Noall therang binstlie Maboved1dilegreesMF elotevation, igthe exis utec oIRadtoof elevAMption canesaucionphasgedarraaundtion thi ranegbion tecluvtter staisicaoplreldngwnorelaivly sustatinar rleadinarnysem isppertaliinlypsilwinoreuths today' technology.24so2goodpanerbnforac nti eini xetd[] [3].rIngadition, 3D.SA a rv ob airtmlmn
However,oop lerfratince Tissevrel pderaded atlsowe elevstationte AndMorF outwcompared tosomDM s dBhger anglte-Dopplerfangle duettohe non-statridgonarityof thedTDinthishregion. ul0cop nstonrtechiquesD duer ato the largtter'sndependenceion
ThebEntmaefi Cofv3DrSaPc iesuevdets ih upt Roh calibrated knowlclaedghesorestianed/orvatianaapietoreansforms,e
3DngAMFsproessorpgien inpFig. 6.rthe oupuSanR ofAathve3D rwichgataresbet tog deprror. aglswtou h seo n
650 -ope cmesto ecnqe.M V srmral
![Page 5: [IEEE 2007 IEEE Radar Conference - Waltham, MA, USA (2007.04.17-2007.04.20)] 2007 IEEE Radar Conference - Enhancing GMTI Performance in Non-Stationary Clutter Using 3D STAP](https://reader035.pdfslide.net/reader035/viewer/2022073023/5750a7f41a28abcf0cc4f085/html5/thumbnails/5.jpg)
-10 20 -10 20~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~................. ....... .............. ..................................... .......... ......... .....-15 -15~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~.............. ........... ..........
-20 10 -~~~~~~~~~~~~~~~~~~~~~~~~0 ........1..0
-35 -
-0.2 5 I-0.500.C) n~~Dppenraizd ope (omlzd
Fig 7 OupuSIR f he D oin-Dman Lcaize (DL patilly Fg.8. utut IN o th 3 JD prtall-aaptveSTP agoith uinadpieSA lortmuiga330a.bn op.bn)LclPocsiga555(a.bn l in op is LclPoesn3Cb0LC lteRein(P)potda0 ucino ag i lvainadDplr0ldnsafnto frnebi lvto n ope.Siigwno eut swindo reut s 8rag isoD 2350 ag isoD
D. Jon omi1oalzd(JL eulscmutaioalsainsReslt0 fr.te.D.nd.D.oit.Dman.oclizd.JD).Te.esltsofth.3 JDL .....using....the..3.x.3.x..3.LPC.wereprocessors were calculated for two different Local Processing not as good as the results..from.the.larger.LPC.given.in.Fig..8,
Region/Cube (LPRILPC) dimensions each (see TableI)..................Forbu.th.saler.PCstll.uterfrmd.he.D.DLreslt.i
four difrn1 ie ldigwnos(..1, 4 0 n 5 otsondet pc cntans u hepromneo l
samplesupport particularl fnorsmalled adpiv Oppoe-piurl umaies theormaiesutdfal)h TA itr
howevertpt IN othesapesuppornt-t-DoFmatinocwasiheld conspatiant igtha Otheu2 JDLR witheol 9JDOFprtaloudatpveromSTPagrthem2 JDLnhertie SToAisolateithisiknown efec frombis thepainalsis.clPrcssn with25 DOF. Thisxelbins becaubise thealargersiTD suetisLmor nlon-eReion theR presenedaaofuncton-stationaryelvtD,npatandDplerly-dapive astafntionaryfthangte smalelevainadDplr.IncnrSt,ihedinghewidoF (125)sus
STAPo proesulsorse1 typeicall outeforfll-aapiv2mthds3 JDLg procssor oupromThesalrDF 2)3 D
becus theytDepeindLonalie smaLer mResutloaizdsemfDprocessorneauseathenonsainayisesscrumetdbwhichltens torthae an hihe degreeDofai sttonarity. This TheelevationDf,thuste3D JDL protessor3xwithCmoerDO
pheginomuen isLeaRLyPsee whmenscomparingseThe leoutput obINRtperfomsabeter.LCsilotefre h DJLrslsi
ofrthel-dpieDF(bsdo2/P iz) raigTefulrslsohD JDL using at3e 33(z. xDopp)3LPPinig.eagarinstrethe2 AMFe rsultsinwindFig. 5i.Wie. the performance5 ntsow u VI.FIcecnstaLntHO uG hTSefraneolsamegte 2Dn JDLwidoes. sltinghl brettuersathiher dsepressione cltterprankssofsca(estiaed) 3D coaranegatics,sicsanglesdueptorth smartclaler anftuo mrstaladationar setpofesTD.reBen'srulemasdrivedh rspecificallyo side-lookinglin-sInofac, thec smalle 3ndxub3elPR grneredi better performance; earwaerays Furthetr,e ra"ngew"/eled-Mallet6k-Brennan (RMB)
fowvrtheae reason. Tupr-oDFrtowshlosattahe 2D JDLreutwuigteithPRsaioaysmpesportyshul beF catpegforizesithermofJDaere tomitoltedde toispcnownsefetfraints,sample.wit density per ibeleation ange. ForgexaperhTDatimrno-4
Inthe3 Drreesultsf exhibiatedionaFig 8D patrully-dmostaptie degionree thasahdrstiallyrdIfferentraspetru thantiher TDO at1-50thecvabilithy ofpe3D STP.Usna5mllr xor5x5locale PefTrocessinoeges beanduhee are nover-00tatingey gatueisbetwement-4. andwhcub ten(LPC tohea3D JD clgearl outegreoform toarthsthe2DJLD -. egrees,io vs. only 1tane gateD perodegresor elevatieOnAhnmF,nandsevenr3D AMF. Ihnaditonpaton otperforming theR angerfrs-58tthrouh-7.ic hagelvto fO
3DaAMF,the JDLAlgorisuthm onlyg.reqires theinersiormnoe seFg )hsa ag i est fony23rnebn e125n 125 elemesatintrcvreianc matrix rahrthnte21degree,smilh itewappenars'ha relaiel goosneddpeformancediscosiblte
512n telemgent xAM LcvRianctematix,-represenionganlsignificnt atlvery low TD/decig.desitiles! potilonee.Nnfo tesae eso. h 2 JLreulsusn te 5LP taioay aml spor soldbecteorzd651emso
![Page 6: [IEEE 2007 IEEE Radar Conference - Waltham, MA, USA (2007.04.17-2007.04.20)] 2007 IEEE Radar Conference - Enhancing GMTI Performance in Non-Stationary Clutter Using 3D STAP](https://reader035.pdfslide.net/reader035/viewer/2022073023/5750a7f41a28abcf0cc4f085/html5/thumbnails/6.jpg)
* [8] T. B. Hale, Airborne Radar Interference Suppression Using Adaptive------------------------- Three-Dimensional Techniques. Dissertation, School of Engineering
* : t <--9 < /and Management, Air Force Institute of Technology (AETC), 2950 P
10--------- Street, Bldg 640, Wright-Patterson AFB, OH 45433-7765, June 2002.*E3\ \X \ / X / AFIT/DS/ENG/02-02.0 '--- --------- \-//[9] T. Hale, M. Temple, J. Raquet, M. Oxley, and M. Wicks, "Localised
three-dimensional adaptive spatial-temporal processing for airborneradar," Radar, Sonar and Navigation, IEE Proceedings -, vol. 150, no. 1,
cn - \ )3 \1vl1 / pp. 18-22, 2003.[10] L. B. Fertig and S. I. Krich, "Benefits of 3D-STAP for X-band GMTI
: -20 Noise only2D/3D \ X airborne radars," in 2005 Adaptive Sensor Array Processing (ASAP)-30 AMF 2D/3D Workshop, (Lincoln Lab, MA), June 2005.
[I 1] J. T. Caldwell, "Forward looking radar: Interference modelling, charac-- e -AMF 3D X terization, and suppression," thesis, School of Engineering and Man-
-40 -X- JDL 2D, DOF=25 X agement, Air Force Institute of Technology (AETC), 2950 HobsonJDL 3D, DOF=125 Way, Bldg 640, Wright-Patterson AFB, OH 45433-7765, March 2004.
-50 -E- JDL 2D, DOF=9 X AFIT/GE/ENG/04-02.-3 - JDL 3D, DOF=27 [12] J. Caldwell and T. Hale, "Space-time adaptive processing for forward
-60 looking arrays," in Radar Conference, 2004. Proceedings of the IEEE,0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 pp. 514-519, 2004.
[13] J. Guerci, J. Goldstein, and I. Reed, "Optimal and adaptive reduced-rank STAP," Aerospace and Electronic Systems, IEEE Transactions on,vol. 36, no. 2, pp. 647-663, 2000.
Fig. 9. Output SINR of an assortment of optimal, fully adaptive, and partially [14] J. Guerci, J. Goldstein, P. Zulch, and I. Reed, "Optimal reduced-rank 3Dadaptive STAP processors evaluated at a target range and elevation of 6km STAP for joint hot and cold clutter mitigation," in Radar Conference,and -30.80. 1999. The Record of the 1999 IEEE, pp. 119-124, 1999.
[15] P. Corbell, M. Temple, and T. Hale, "Forward-looking planar array 3d-stap using space time illumination patterns (stip)," in Sensor Array and
VII. CONCLUSION MMultichannel Processing, 2006. Fourth IEEE Workshop on, pp. 602-606,VII. CONCLUSION ~~~~~~~July2006.
Planar array (3D) STAP has the unique ability to estimate [16] A. Jaffer, B. Himed, and P. Ho, "Estimation of range-dependent clutter(in one .D covariance matrix) the forward-looking clutter covariance by configuration system parameter estimation," in Radar(in one 3D covarlance matrlx tne lorwara-looKmg clutter Conference, 2005 IEEE International, pp. 596-601, 2005.spectrum as it varies over range and elevation (see Fig. 2). Lin- [17] 0. Kreyenkamp and R. Klemm, "Doppler compensation in forward-ear array (2D) STAP cannot discern the elevation dimension looking stap radar," Radar, Sonar and Navigation, IEE Proceedings -,over which the clutter (and training data) is non-stationary, vol. 148, no. 5, pp. 253-258, 2001.
[18] F. Lapierre and J. Verly, "Computationally-efficient range-dependencewhich results in a very poor estimate of the clutter statistics compensation method for bistatic radar stap," in Radar Conference, 2005from a forward-looking array. This paper demonstrates how IEEE International, pp. 714-719, 2005.3D STAP can be exploited to drastically improve STAP pe, .[19] S. Hayward, "Effects of motion on adaptive arrays," Radar Sonar and
Navigation, IEE Proceedings -, vol. 144, no. 1, pp. 15-20, 1997.formance in the forward-looking GMTI application, achieving [20] X. Neyt, F. Lapierre, and J. Verly, "Estimation of geometric radar>55 dB improvement in output SINR under the conditions configuration parameters for range-dependent compensation in stap in
simulatedherein. It is hoped 3D (planar array) STAP maythe presence of targets, jammers, and decorrelation effects," in SensorArray and Multichannel Signal Processing Workshop Proceedings, 2004,
also prove to be a robust solution in other applications which pp. 662-666, 2004.have suffered performance degradation due to (geometry- [21] M. Zatman, "Performance analysis of the derivative based updating
method," in 2001 Adaptive Sensor Array Processing (ASAP) Workshop,dependent) non-stationary interference as well. (Lincoln Lab, MA), March 2001.REFERENCES [22] G. Borsari, "Mitigating effects on STAP processing caused by an
inclined array," in Radar Conference, 1998. Proceedings of the IEEE,[1] P. Richardson and S. Hayward, "Adaptive space time processing for pp. 135-140, 1998.
forward looking radar," in Radar Conference, 1995., Record of the IEEE [23] F. R. Pearson and G. K. Borsari, "Simulation and analysis of adaptive in-1995 International, pp. 629-634, 1995. terference suppression for bistatic surveillance radars," in 2001 Adaptive
[2] P. Richardson, "Space-time adaptive processing for manoeuvring air- Sensor Array Processing (ASA) Workshop, (Lincoln Lab, MA), Marchborne radar," Electronics & Communication Engineering Journal, 2001.vol. 11, no. 1, pp. 57-63, 1999. [24] B. Himed, Y. Zhang, and A. Hajjari, "Stap with angle-doppler com-
[3] R. Klemm, Principles of Space-Time Adaptive Processing, vol. 12 of pensation for bistatic airborne radars," in Radar Conference, 2002.IEE Radar, Sonar, Navigation and Avionics Series. Michael Faraday Proceedings of the IEEE, pp. 311-317, 2002.House, Six Hills Way, Stevenage, Herts. SG1 2AY, United Kingdom: [25] J. Ward, "Space-time adaptive processing for airborne radar," Con-The Institution of Electrical Engineers, 2002. tract F19628-95-C-0002, Lincoln Laboratory, Massachusetts Institute of
[4] R. Klemm, ed., Applications of Space-Time Adaptive Processing, vol. 14 Technology, Lexington, Massachusetts, December 1994.of IEE Radar, Sonar, Navigation and Avionics Series. Michael Faraday [26] L. E. Brennan, J. D. Mallet, and I. S. Reed, "Adaptive arrays in airborneHouse, Six Hills Way, Stevenage, Herts. SG1 2AY, United Kingdom: mti radar," IEEE Transactions on Antennas and Propagation, vol. AP-The Institution of Electrical Engineers, June 2004. 24, pp. 607-615, September 1976.
[5] W. Melvin, "Space-time adaptive radar performance in heterogeneous [27] I. S. Reed, J. Mallett, and L. Brennan, "Rapid convergence rate in adap-clutter," Aerospace and Electronic Systems, IEEE Transactions on, tive arrays," IEEE Transactions on Aerospace and Electronic Systems,vol. 36, no. 2, pp. 621-633, 2000. vol. AES-10, No. 6, pp. 853-863, November 1974.
[6] W. Melvin, M. Callahan, and M. Davis, "Comparison of bistatic cluttermitigation algorithms for varying geometries," in Radar Conference,2005 IEEE International, pp. 98-103, 2005. "The views expressed in this article are those of the au-
[7] D. A. Page, B. Himed, and M. E. Davis, "A stap approach for bistatic thrs an dontrfetofca oiyo h ntdSaespace-based gmti radar," in 2005 Adaptive Sensor Array Processing Ai Foce Deatetovees r h ..Gvrmn.(ASAP) Workshop, (Lincoln Lab, MA), June 2005.AiFoc,Dprmnofeese rth U..Gvnet"
652