Embed Size (px)
Citation preview
![Page 1: [IEEE 2008 3rd International Conference on Sensing Technology (ICST 2008) - Taipei, Taiwan (2008.11.30-2008.12.3)] 2008 3rd International Conference on Sensing Technology - Development](https://reader042.pdfslide.net/reader042/viewer/2022022203/5750a59f1a28abcf0cb35787/html5/page/1.jpg)
3rd International Conference on Sensing Technology, Nov. 30 - Dec. 3, 2008, Tainan, Taiwan
Development of Gait Phase Analyzing Devices for the GaitTraining Equipment for Hemiplegia Patients
Junho Parkl,2, Junghyeon Choi l
,2 and Jongman ChO l,2
IDepartment of Biomedical Engineering,Inje University, Gimhae, Republic of Korea
2BK21 Bio-Organ Tissue Regeneration Project Team,Inje University, Gimhae, Republic of Korea
[email protected], [email protected], [email protected]
Abstract
This paper describes the design and development of gait phase analyzing devices which are key componentsconsisting of the gait training equipment for hemiplegia patients. The devices should be durable against thefriction of rotating rubber belt of the gait training equipment and robust to the mechanical vibration caused bythe operation of the gait training equipment so that they can detect the gait phase accurately during training. Wecould develop the gait phase analyzing device that can satisfy these criteria by designing and implementing oftwo new devices, a magnet shoe and magnetic sensor array board. The magnet shoe has three rows of magneticsensor array and each row has different number of permanent magnets so that which parts of the shoe aretouched to the magnet sensor array board. In addition, the shoe was designed as an overshoe so that a patient canattach and detach the shoe easily. The magnet sensor array board has 1,620 magnetic sensors which are arrangedin 30 rows and each row consists of 54 magnetic sensors where the distance between sensors is 2 cm inhorizontal and vertical direction.
The experiment results show that they have spatial resolution of 1 cm in horizontal and vertical directions andtemporal resolution of 20 frames per second of the gait phase. The gait phase analyzing devices developed in thisstudy were incorporated into the design of gait training equipment for hemiplegia patients and they showedfeasibility in practical operating environment. They also can be applied to other similar equipment which needsthe gait phase analysis function.
Keywords: magnetic sensor array board, magnet shoe, gait phase analyzing device, gait training equipment,hemiplegia patient
1 Introduction
Stroke is the main cause for the disabilities of agingpeople [1]. About 60% of total stroke patients getpermanent neural disability and they cannot continuenormal functional movement. In addition, thehemiplegia is the most common symptom to thestroke patients for the next 6 month. [2][3].
Most of the hemiplegia patients who have difficultiesin their balance and posture control get disabilitieswhen they try to stand up and walk because of theasymmetrical posture, the abnormal body balance, thedeficiency of abilities to move body weight, and theloss of special movement arguments [4]. As a result,the ideal goal of functional movement training forhemiplegia patients is helping them to decrease theirasymmetrical movement patterns and recover theirsymmetrical gait by balanced body weight [5][6].
A parallel guide bar is one of the widely usedequipment in gait training for monoplegia patients inrehabilitation hospitals and a patient trains steppingby himself leaning on the parallel guide bar on bothside of footpath. Or, a monoplegia patient can get
978-1-4244-2177-0/08/$25.00 © 2008 IEEE 632
help from a physical therapist instead of the parallelguide bar during stepping training. However, thetraining method using a parallel guide bar does notprovide an efficient gait training and incorrectness ofposture during gait training. Accordingly, active gaittraining equipment is required for patients with gaitdisorder. However, the gait phase analyzing deviceswhich are used in the commercialized in the gaittraining equipment is very expensive, so it is not easyto purchase for individual level.
In other study [7], we have developed gait trainingequipment for this purpose and gait phase analyzingdevices were required for the proper operation. Inshort, the final goal of this research is developing gaitphase analyzing devices which were incorporated intoa gait training system for monoplegia patients.
2 Methods
2.1 System Configuration
Figure 1 shows the overall system design of the gaittraining equipment for the monoplegia patients and itconsists of four sub units - gait phase analyzing unit,lower panel controlling unit, lower limb pulling and
![Page 2: [IEEE 2008 3rd International Conference on Sensing Technology (ICST 2008) - Taipei, Taiwan (2008.11.30-2008.12.3)] 2008 3rd International Conference on Sensing Technology - Development](https://reader042.pdfslide.net/reader042/viewer/2022022203/5750a59f1a28abcf0cb35787/html5/page/2.jpg)
3rd International Conference on Sensing Technology, Nov. 30 - Dec. 3,2008, Tainan, Taiwan
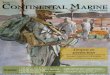
releasing unit, and safety unit. This paper mainlyfocuses on the development of the gait phaseanalyzing unit which tracks the gait phase of thepatient taking gait rehabilitation training using thisequipment.
Figure 1: The overall system design of the gaittraining device for hemiplegia patients.
are attached to the front part of foot, one of them isattached to the middle part of foot and three of themare attached to the rear part of foot. Different numbersof magnets are placed depending on the part of foot,so that the partes) of foot touching the lower plate canbe detected by analyzing the signals from the MSAB.
Figure 3: The magnetic sensors in the MSAB. Theexisting of magnetic field of magnet shoe is detectedby two magnetic sensors in the left side of MSAB.
272.30
10.00Ej
oI1J M
:~
2.2 Gait Phase Analyzing Device(GPAD)
7018 85.44
Figure 2 shows the block diagram of the GPAD whichconsists of a two-dimensional magnetic sensor arrayboard (MSAB), magnet shoe, data acquisition boardand PC.
Figure 2: Block diagram of the gait phase analyzingdevice.
The MSAB has 1,620 magnetic sensors which arearranged 30 rows and 54 columns and each magneticsensor is arranged 2 cm apart from neighboringsensors in horizon and vertical directions. This MSABis mounted beneath of the lower panel and thedistance between the top of each magnetic sensor andthe magnet which is attached to the magnet shoe is1cm. A rotating rubber belt which has a thickness of 2mm is mounted on the top of the lower panel andbelow of the magnet shoes. Figure 3 and figure 4show the configuration of the magnet shoe, MSABand lower panel.
The magnet shoe depicted in Figure 4 is speciallydesigned to detect the touching parts of foot. Totalnine magnets have been attached to the bottom ofmagnet shoe as shown in figure 4. Five of the magnets
633
Figure 4: The magnet shoe for detecting location of apatient's foot.
When a patient wearing the magnet shoes steps on therubber belt, the magnetic sensors located just belowthe magnets touching the rubber belt are turned on asshown in figure 3.
The lower plate containing the MSAB is mountedbelow the rotating belt as shown in figure 5.
The status of each magnetic sensor is checked by thescanning circuit by using the same method used inmatrix-type keyboard scanning. A digital input andoutput signal conditioning board has been adapted atthe main control computer to scan the magneticsensors. The acquired information regarding to thelocations of touching magnets is used to control thegait rehabilitation equipment after signal processing.The scanning is done in row by row and the entiremagnetic sensors are scanned every 50 millisecondand each scanning process takes less than 1millisecond.
![Page 3: [IEEE 2008 3rd International Conference on Sensing Technology (ICST 2008) - Taipei, Taiwan (2008.11.30-2008.12.3)] 2008 3rd International Conference on Sensing Technology - Development](https://reader042.pdfslide.net/reader042/viewer/2022022203/5750a59f1a28abcf0cb35787/html5/page/3.jpg)
3rd International Conference on Sensing Technology, Nov. 30 - Dec. 3, 2008, Tainan, Taiwan
Figure 5: The mechanical system diagram of theMSAD.
3 Results
Two kinds of experiments were carried out to get thespatial resolution of MSAB and temporal resolutionof GPAD.
Figure 6 and figure 7 show the experiment to measurethe spatial resolution of MSAB. First, we assumedthat every magnetic sensor used in this experimenthas very small error in sensitivity based on the datasheet provided by the sensor maker and picked up apart of the MSAB instead of testing entire sensors.The picked up area consists of 9 magnetic sensorsarranged 3 rows and 3 columns as shown in figure 6.Each dot in the figure indicates the location of amagnetic sensor. A magnet which has the same sizeand sensitivity used in magnet shoe was initiallypositioned at a point which is 2 cm apart in horizontaland vertical directions from the bottom-left comer ofthis array and checked the activated magnets. Themagnetic sensor was re-positioned at the nextchecking position which is 1mm right to the previouschecking point after checking the activated magneticsensors. This checking process was repeated until themagnet was poisoned to the right-most position whichis also 2 cm apart in vertical and horizontal directionsfrom the lower-right magnetic sensor of the array.Once one line scanning was finished, the next linewhich is 1mm apart from the previous scanned line invertical direction was checked, and so on, to the lastline.
After the scanning, the collected data were analyzedto get the sensible range of each magnetic sensor andit was shown as a circle in figure 6. Each number inthe sensor location indicates the radius of sensiblerange circle. Through the figure 6, we could confirmthe fact graphically that there was no dead area wherethe magnet is not detected in the MSAB.
The numbers of activated sensors were differentdepend on the location of the magnet. The location ofthe magnet was decided as shown in figure 7 whenmore than two sensors were activated. In this figurethe geographical center point for the coordinates of
634
the activated magnetic sensors was considered as theexpected location of the magnet. Each circle indicatesthe location of the activated magnet sensor and thestar indicates the expected location of the magnet. Asa result we could get 10 mm spatial resolution of theMSAB through this experiment and entire area ofMSAB could be covered.
The experiment to get the temporal resolution of theGPAD was followed and the results were shown infigure 8. The subject having normal gait posture andphase wore the magnet shoes and walked on therotating rubber belt in normal speed. The rubber beltrotating speed was controlled automatically so that thesubject could keep normal walking speed duringexperiment. In each figure the left-side figure showsthe monitor screen displaying the locations ofactivated magnet sensors of MSAB and the right-sidefigure shows its corresponding subject's gait phase forcomparison. Figure 8 (a) corresponds to the momentwhen both feet of the subject are touched down therubber belt, figure 8 (b) indicates the moment whenthe subject raised the left leg to go forward, figure 8(c) is for the moment when the heel of the left foot istouching the rubber belt, figure 8 (d) corresponds tothe moment when both feet of the subject are toucheddown the rubber belt for going forward, figure 8 (e)indicates the moment when the subject raised the heelof the right leg to go forward, figure 8 (f) indicates themoment when the subject raised the right leg to goforward, figure 8 (g) is for the moment when the heelof the right foot is touching the rubber belt, figure 8(h) corresponds to the moment when both feet of thesubject are touched down the rubber belt where theright leg is advanced for going forward. Thus, theGPAD could decide each gait phase by analyzingeach pattern of activated magnetic sensors.
Though it showed that 20 times of the gate phaseanalysis per second was sufficient to control the gaittraining equipment for hemiplegia patients, it couldanalyze higher rate if required.
Figure 6: The result of the performance test ofmagnetic sensor panel.
![Page 4: [IEEE 2008 3rd International Conference on Sensing Technology (ICST 2008) - Taipei, Taiwan (2008.11.30-2008.12.3)] 2008 3rd International Conference on Sensing Technology - Development](https://reader042.pdfslide.net/reader042/viewer/2022022203/5750a59f1a28abcf0cb35787/html5/page/4.jpg)
3rd International Conference on Sensing Technology, Nov. 30 - Dec. 3, 2008, Tainan, Taiwan
(a) (b) (c) (d)
Figure 7: The algorithm to decide the position of magnet.
(a) Right (foot flat), Left (foot flat) (b) Right (foot flat), Left (swing)
(c) Right (foot flat), Left (heel strike) (d) Right (foot flat), Left (foot flat)
(e) Right (heel oft), Left (foot flat) (t) Right (swing), Left (foot flat)
(g) Right (heel strike), Left (foot flat) (h) Right (foot flat), Left (foot flat)
Figure : In each figure the left-side figure shows the monitor screen displaying the locations of activatedmagnet sensors of MSAB and the right-side figure shows its corresponding subject's gait phase for comparison.
4 Conclusions
A gait phase analyzing devices, consisting of magnetshoes, magnetic sensor array board and beingincorporated into the gait training equipment forhemiplegia patients were designed, implemented andtested in this study.
635
The magnetic sensor array board consists of 1,620magnetic sensors and the magnetic sensors werearranged in 30 rows and 54 columns and 2 cm apartfrom the neighboring ones.
The magnet shoe has three rows of magnetic sensorsand each row has different number of permanentmagnets so that which parts of the shoe are touched to
![Page 5: [IEEE 2008 3rd International Conference on Sensing Technology (ICST 2008) - Taipei, Taiwan (2008.11.30-2008.12.3)] 2008 3rd International Conference on Sensing Technology - Development](https://reader042.pdfslide.net/reader042/viewer/2022022203/5750a59f1a28abcf0cb35787/html5/page/5.jpg)
3rd International Conference on Sensing Technology, Nov. 30 - Dec. 3, 2008, Tainan, Taiwan
the magnet sensor array board. In addition, the shoewas designed as an overshoe so that a patient canattach and detach the shoe easily.
The experiment results showed that they have spatialresolution of 1 cm in horizontal and vertical directionand temporal resolution of 20 frames per second ofthe gait phase.
The gait phase analyzing devices developed in thisstudy were incorporated into the design of gaittraining equipment for hemiplegia patients and theyshowed feasibility in practical operating environment.They also can be applied to other similar equipmentwhich needs the gait phase analysis function.
5 References[1] G.E. Gresham and T.R. Dawber, "Residual
disability in survivors of stroke: TheFramingham Study," N. Engl. J. Med., vol. 293,pp.954-956 (1975).
[2] D.T. Wade and R.L. Hewer, "Functional abilitiesafter stroke: Measurement, national history andprognosis," J. Neurol. Nerosurg. Psychiatry, vol.50, pp.177-182 (1987).
[3] G.R. Williams, J.G. Jiang, D.B. Matchar and G.P.Samsa, "Incidence and occurrence of total (firstever and recurrent) stroke," Stroke, vol. 30,pp.2523-2528 (1999).
[4] J.H. Carr and R.B. Shepherd, "Investigation of anew motor assessment scale for stroke patients,"Phy. Ther., vol. 65, pp.175-180 (1985).
[5] J.C. Wall and G.1. Turnbull, "Gait asymmetriesin residual hemiplegia," Arch. Phys. Med.Rehabil., vol. 67, pp550-553 (1986).
[6] R.G. Hamman, I. Mekjavic, A.1. Mallinson andN.S. Longridge, "Training effects duringrepeated therapy sessions of balance trainingusing visual feedback," Arch. Phys. Med.Rehabil., vol. 73, pp.738-744 (1992).
[7] J. Cho, J. Choi, J. Park (2008) "A System Designof Gait Training Device for MonoplegiaPatients," in Proc. 30th Ann. IntI. Conf. of theIEEE Eng. in Medicine and Biology Society,submitted for publication.
636