Embed Size (px)
Citation preview
![Page 1: [IEEE 2009 IEEE 34th Conference on Local Computer Networks (LCN 2009) - Zurich, Switzerland (2009.10.20-2009.10.23)] 2009 IEEE 34th Conference on Local Computer Networks - Energy-efficient](https://reader030.pdfslide.net/reader030/viewer/2022020407/5750823e1a28abf34f97fe50/html5/page/1.jpg)
Energy-Efficient Routing in Mobile Wireless SensorNetworks using Mobility Prediction
Andrea Munari†, Wolfgang Schott†, and Sukanya Krishnan∗† IBM Research GmbH - Zurich Research Laboratory (ZRL), Zurich, Switzerland
∗ Networked Systems Laboratory, EPFL, Lausanne, Switzerlandemail: {una, sct}@zurich.ibm.com, [email protected]
Abstract— A method is presented for efficiently and reliablyrouting data packets from a static information source to a mobilesink through a multi-hop wireless sensor network. While thesource and all sensor nodes are located at fixed and knownpositions, the mobile sink estimates and tracks its location,speed, and acceleration with a Kalman filter. To reliably andtimely route data packets, the source predicts the location of themobile sink. The prediction is updated by receiving messagesfrom the mobile sink, containing its current location, speed,and acceleration. These messages are sent only if the Euclideannorm of the error between the predicted state and the stateestimated by the Kalman filter exceeds a pre-defined threshold.The control messages and the data packets are forwardedin a multi-hop fashion through the network using geographicrouting. Simulation results demonstrate that the proposed schemeoutperforms conventional routing protocols in terms of packettransfer reliability, latency, and energy efficiency.
Keywords: Mobile WSN, geographic routing, localization
I. INTRODUCTION
Wireless Sensor Networks (WSNs) are typically composedof a large number of battery powered and computationallylimited sensor nodes that are scattered over a wide geographicarea. In many WSN applications, the sensors form an ad hocnetwork to route data from an information source to one orseveral sinks in a multi-hop fashion. For this purpose, staticrouting protocols such as AODV [1] or DSR [2] are oftenapplied that rely on the construction of a single routing pathfrom the source to the sink before forwarding data.
In recent years, novel location-based services have createda growing interest in the design of wireless sensor networkswith mobile sinks, i.e. mobile WSNs. In [3], for example, theauthors consider a scenario in which multiple users equippedwith mobile phones move through a sensor field and interactwith a WSN by querying information of interest. In [4], asimilar application has been described for a "store of thefuture", where customers receive local advertising and productinformation on their shopping-cart tablet via a WSN froma central server. Another example of a mobile WSN hasbeen described for an intelligent transportation system in[5]. In this case, mobile sinks are represented by cars thatcollect updates from static sensors about traffic conditions andpotential environmental dangers.
However, the presence of mobile sinks in a WSN mayintroduce frequent changes of the network topology, whichmakes it difficult to establish and maintain a stable and reliable
routing path in case of using static protocols. Whenever aroute is broken due to sink mobility, route recovery messageshave to be exchanged to build a new path. This approachsignificantly increases the overhead and thus degrades thenetwork performance in terms of latency and energy con-sumption. These disadvantages can be alleviated by using adynamic protocol such as geographic routing [6] to forwardthe data packets. This protocol does not require the executionof a route construction procedure before transmitting data,but it assumes that each node knows its own geographiclocation and the position of the destination. A sensor node thathas data to forward simply broadcasts a request packet withthe geographic coordinates of the sink to its neighbors. Thereceivers of this message exploit their topological knowledgeto calculate the advancement they can offer towards the sinkand contend among each other to elect the next hop closest tothe destination. The capability of geographic routing to avoidroute construction, however, comes at the expense of trackingthe destination. To unleash the potential of this approach, it isthus fundamental to design an efficient strategy to continuouslymonitor the geographic position of the sink and distribute thisinformation in the network.
Starting from these remarks, in this paper we present anovel geographic routing protocol for efficiently and reliablyforwarding data packets from a static information source toa mobile sink through a multi-hop wireless sensor network.While the source and all sensor nodes are located at fixed andknown positions, the mobile sink estimates and tracks its state(i.e. its location, velocity, and acceleration) from noisy mea-surements with a Kalman filter. To reliably and timely routedata packets, the source predicts the location of the mobilesink. The state of the predictor is updated by receiving STATE-UPDATE messages from the mobile sink, which contain itscurrent state. These messages are not periodically sent, butonly if the Euclidean norm of the error between the predictedstate and the state estimated by the Kalman filter exceeds apre-defined threshold. The STATE-UPDATE messages as wellas the DATA packets are forwarded in a multi-hop fashionthrough the wireless sensor network using geographic routing.Our simulation results demonstrate that the proposed schemeoutperforms conventional routing protocols in terms of packettransfer reliability, latency, and energy efficiency.
The paper is outlined as follows. Section II discusses therelated work. Section III introduces our approach to routing in
514978-1-4244-4487-8/09/$25.00 ©2009 IEEE
2009 IEEE 34th Conference on Local Computer Networks (LCN 2009) Zürich, Switzerland; 20-23 October 2009
![Page 2: [IEEE 2009 IEEE 34th Conference on Local Computer Networks (LCN 2009) - Zurich, Switzerland (2009.10.20-2009.10.23)] 2009 IEEE 34th Conference on Local Computer Networks - Energy-efficient](https://reader030.pdfslide.net/reader030/viewer/2022020407/5750823e1a28abf34f97fe50/html5/page/2.jpg)
mobile WSNs. Section IV describes the method for estimatingand tracking the state of the mobile sink, and its prediction atthe source. Details on the proposed geographic protocol aregiven in Section V. Section VI provides the simulation resultsfollowed by our conclusions in Section VII.
II. RELATED WORK
Several solutions for fast and reliable data delivery to mobilesinks in a WSN have been proposed in the literature. Most ofthem incorporate routing protocols that have originally beendesigned for static ad hoc networks and exploit the conceptsof clustering and mobility prediction.
In [7], a two-tier data dissemination model for large-scaleWSNs has been proposed. The main idea of this approachis to partition the WSN into clusters, each of them with aclusterhead that knows a route back to the source. Whenever amobile sink enters the sensor field, a local flooding procedureis triggered to inform the clusterhead of its presence. Thisnode then forwards the query of the sink to the source alongthe known route. Once the source has received the query, datapackets can be transmitted to the mobile sink following againa two-tier approach: packets follow known and static routesup to the clusterhead that has in turn the role to forward themto the sink coping with its mobility. The advantage of thisapproach over classical AODV and DSR routing is that theflooding of messages is kept local and only quick adjustmentsto the path have to be made as long as the sink moveswithin the cluster. However, it should be noted that floodingis not completely avoided and still has a severe impact on thenetwork performance if the sink moves from one cluster toanother.
In [5], a simple yet effective routing solution has beenproposed that enhances the two-tier dissemination protocol of[7] by incorporating mobility prediction. The authors considera WSN deployed along a street to gather environmentaldata and route the collected information to cars passing by.The cars (i.e. the mobile sinks) are equipped with a GPSbased positioning system and are thus aware of their location,speed, and mobility pattern. When a car enters the WSN, itsends out an information query to a sensor next to the road,containing its speed and trajectory, and indicating the regionfrom where it wants to receive the requested environmentalinformation. When a sensor receives the query, the requestis forwarded by means of a geographic routing protocol tothe sensor node that is closest to the center of the indicatedregion. This node takes on the role of a clusterhead andinitiates gathering of local environmental information. Oncethe procedure is accomplished, the clusterhead aggregates thecollected data and forwards the generated packet to the car atthe predicted location. The proposed scheme is tailored to aspecific application that is relevant for the automobile industry.However, its improvements cannot easily be achieved in anindoor environment because GPS cannot be applied.
In [8], the authors propose to enhance the performance of avehicular ad-hoc network by embedding an adaptive beaconingstrategy into the geographic routing protocol GPSR [9]. To
Fig. 1. Mobile sink moving in a static sensor field
reduce the overhead in the network, the frequency of beacontransmissions containing the geographic location of the mobilesinks is adapted to the node mobility and the network traffic.In [8], however, no method is described how routing can beefficiently combined with a location tracking scheme. On thecontrary, in [4] a method is described for efficiently sensingand tracking slowly moving objects in an indoor environmentbut no information is provided on how data can be routed tothem.
III. GEOGRAPHIC ROUTING IN MOBILE WSNS
In order to introduce the key ideas of our proposal, letus consider the scenario depicted in Fig. 1, composed by aset of static wireless sensor nodes {si} deployed at knowngeographic positions, a mobile sink MS that moves with atime-varying speed v(t) along an unknown trajectory r(t)through the sensor field, and a source S that is located at aknown position. The source has one or several DATA packetsto transmit to the MS. In general, such frames cannot bedirectly transmitted to the destination over a single radio linkbecause the MS is often too far away; therefore, multi-hoptransmissions have to be applied.
An efficient solution for forwarding a DATA packet hop-by-hop from the source to the mobile sink can be obtained byapplying geographic routing. This approach does not establisha static path from S to MS before transmitting data, but itrather dynamically establishes a route while forwarding theinformation. In particular, when a data packet for the sink isgenerated, the source selects the node among its neighborswhich offers the maximum geographic advancement towardsthe MS. Once the next hop is chosen, the DATA packetis forwarded to the selected node that, in turn, iterates theprocedure until the sink is reached.
Geographic routing can only be applied if all sensor nodesare aware of their geographic location as well as the position
515
![Page 3: [IEEE 2009 IEEE 34th Conference on Local Computer Networks (LCN 2009) - Zurich, Switzerland (2009.10.20-2009.10.23)] 2009 IEEE 34th Conference on Local Computer Networks - Energy-efficient](https://reader030.pdfslide.net/reader030/viewer/2022020407/5750823e1a28abf34f97fe50/html5/page/3.jpg)
Fig. 2. Discrete-time system and measurement model
of the sink. However, while in this scenario the formercondition can easily be met, the mobility of the sink createsthe need for a mechanism to inform S about the currentposition of the destination. In order to achieve this, two taskshave to be accomplished: on the one hand, a mobile nodehas to continuously monitor its position, while on the otherhand this information has to be distributed in the network.To achieve the latter goal, the MS has to transmit STATE-UPDATE messages to the source that contain information onits location. In this paper, we propose a novel protocol thatminimizes the number of STATE-UPDATE transmissions andexploits mobility prediction.
The next two sections describe in further details our ap-proach to effectively fulfill the two goals.
IV. STATE ESTIMATION AND MOBILITY PREDICTION
ALGORITHMS
The mobile sink estimates its geographic location with aKalman filter that monitors noisy position measurements ob-tained with sensor devices such as accelerometers, gyroscopes,compass, etc. [4]. The design of the Kalman filter is basedon a state-space model that takes into account the generationprocess of the acceleration driving the MS, its velocity andposition. In principle, the generation process can be modeled indifferent ways considering various mobility patterns of the MSand characteristics of the measurement device. To illustratethe basic idea of the proposed method, we define a simplestate-space model that describes a random movement of theMS along one axis of the coordinate system and ignoresimperfections of the measurement device. The extension toa more complex, but more accurate model and to a multi-dimensional coordinate system is straightforward.
Let us assume that the mobile sink moves along a trajectoryr(t) that is a straight line parallel to one axis of the coordinatesystem. Initially, the MS is stationary at position r(0) = 0. Fortime t ≥ 0, the MS is driven by a random acceleration a(t)that is modeled by a first-order Markov process
a(t) = −αa(t) + w(t) α ≥ 0, (1)
where w(t) represents white noise with variance σ2w = 2ασ2
a
and α is reciprocal to the time maneuver constant of the mobilesink. The movement of the MS can thus be modeled by settingthe parameters α and σ2
a. Typical values can be obtained fromthe Singer acceleration model [10]. The position r(t) of theMS relates to its acceleration a(t) according to the Newton
Fig. 3. Kalman filter and state predictor at mobile sink
lawr(t) = v(t) = a(t) , (2)
where v(t) denotes the MS velocity.The linear differential equations (1) and (2) represent the
continuous-time system model of the investigated system andcan be written in the state-space form
x(t) = Fx(t) + Gw(t) , (3)
where the state vector x(t) and the matrices F and G aredefined as:
x(t) =
⎡⎣ r(t)
v(t)a(t)
⎤⎦ , F =
⎡⎣ 0 1 0
0 0 10 0 −α
⎤⎦ , G =
⎡⎣ 0
01
⎤⎦ .
(4)The corresponding discrete-time system model is given by
xk+1 = Φxk + uk , (5)
as shown in Fig. 2, where the elements of the state vectorxT
k = [rk vk ak] represent samples of the position, velocity,and acceleration of the MS taken at time kT . The matrix Φdefining the transition between two successive states is givenby
Φ =
⎡⎣ 1 T 1
α2 [−1 + αT + e−αT ]0 1 1
α [1 − e−αT ]0 0 e−αT
⎤⎦ . (6)
uk is a discrete-time white noise vector with covariance matrix
Q = E{ukukT } = 2ασ2
a
⎡⎣ q11 q12 q13
q12 q22 q23
q13 q23 q33
⎤⎦ , (7)
whose coefficients are reported at the bottom of next page.Moreover, we assume that the location position rk embed-
ded in additive white noise can be measured at the ouput of thesystem. The discrete-time measurement model is thus given by
zk = Hxk + nk (8)
as illustrated in Fig. 2, where the matrix is given by H =[1 0 0] and nk is additive white noise with variance σ2
n.Based on the discrete-time state-space model given by (5)
and (8), the optimal Kalman filter can be derived [11]. As
516
![Page 4: [IEEE 2009 IEEE 34th Conference on Local Computer Networks (LCN 2009) - Zurich, Switzerland (2009.10.20-2009.10.23)] 2009 IEEE 34th Conference on Local Computer Networks - Energy-efficient](https://reader030.pdfslide.net/reader030/viewer/2022020407/5750823e1a28abf34f97fe50/html5/page/4.jpg)
shown in Fig. 3, this filter monitors the noisy measurementszk at the MS and computes in real-time a state estimate xT
k =[rk vk ak] of the MS that comprises the position estimate rk,velocity estimate vk, and acceleration estimate ak. An iterativecomputation of xT
k is achieved by firstly predicting the stateof the MS based on the equation
x−k = Φxk−1. (9)
The predicted state x−k is thus given by linearly projecting the
state estimate xk−1 from time (k−1)T one time interval aheadusing the transition matrix Φ. Afterwards, the state estimateerror covariance matrix P−
k for the current predicted state iscalculated using the updated state estimate error covariancematrix Pk−1 of the previous state estimate xk−1:
P−k = ΦPk−1ΦT + Q. (10)
On receiving a location position measurement zk from themeasurement unit at time kT , the Kalman filter updates itsstate estimate based on the equation
xk = x−k + Kk(zk − Hx−
k ). (11)
The state estimate xk is thus calculated by adding to thepredicted state x−
k the error between the location position mea-surement zk and the reconstructed output parameter weightedby the Kalman gain vector
Kk = P−k HT (HP−
k HT + σ2n)−1. (12)
To obtain the optimum Kalman filter gain settings, the co-variance matrix of the state vector estimation error has to becomputed according to
Pk = P−k − KkHP−
k . (13)
The state estimate xk provided by the Kalman filter istransmitted as parameter of the STATE-UPDATE message fromthe mobile sink via the sensor field to the source.
The source can thus predict the state xk of the MS accordingto:
xk =
⎧⎪⎨⎪⎩
xk if STATE-UPDATE message has
been received at time kT,
Φxk−1 otherwise.
(14)
On receiving a STATE-UPDATE message at time kT , thesource copies the state xk contained in the message into theregister of the state predictor. When no message is received,the source predicts the state of the MS by linearly projectingthe predicted state xk−1 one time interval T ahead using thesystem matrix Φ. Note that this prediction strategy differs
from the one incorporated in the classical Kalman filter. Whilein the Kalman filter new estimates are obtained immediatelyafter receiving a new measurement zk, the state predictor onlytakes into account new measurements after receiving an updaterequest from the mobile sink.
To reduce the number of control message exchanges overthe WSN, the mobile sink issues a STATE-UPDATE requestonly if the predicted value xk deviates too far from thestate estimate xk provided by the Kalman filter. To measurethis deviation, a copy of the state predictor has also to beimplemented at the MS as shown in Fig. 3. The error vectorek between the state estimate xk provided at the output ofthe Kalman filter and the predicted estimate xk provided atthe output of the state predictor is computed. A comparatorcalculates the Euclidean norm of the error vector and comparesit to a threshold εTh. If the norm exceeds εTh, the comparatortriggers an update of the state of the predictors at the mobilesink and at the source. At the mobile sink, the state estimatexk is directly loaded via the multiplexer into the register ofthe state predictor. The state of the predictor at the source isupdated by transmitting the protocol message STATE-UPDATEwith the state estimate xk as parameter.
V. MOBILITY PREDICTION ROUTING PROTOCOL
To effectively implement the routing approach describedin Section III and IV, some coordination among nodes isrequired. In particular, methods to bi-directionally transferinformation between a mobile sink and a static source througha WSN have to be provided. To this aim, we present a novelcarrier-sense based cross-layer MAC and routing protocolcalled Mobility Prediction Routing (MPR).
Let us refer to the scenario of Fig. 1 and let us start byconsidering the situation of a sink that has a notificationto send to the source S, either because it has just joinedthe network or because the deviation between predicted andKalman-filter estimated state has exceeded a threshold. In thiscase, the mobile station transmits a STATE-UPDATE messagecontaining the current estimate of its state following the stan-dard 802.11 CSMA mechanism based on Binary ExponentialBackoff (BEB) [12]. Nodes in {si} that successfully decodethis packet enter a distributed contention procedure to selectthe node that has to forward the information. To this aim,each candidate evaluates the advancement it offers towardsthe source1 and picks an integer m inversely proportional tothe computed value in the set {1, 2, . . . , CW−1}, where CW
1We remark that since the source is assumed to be static and location aware,its geographical position can be easily distributed to other nodes in the WSN,e.g., by means of a broadcast procedure, after network deployment.
q11 =1
2α5
[1 − e−2αT + 2αT +
2α3T 3
3− 2α2T 2 − 4αTe−αT
]
q12 =1
2α4
[e−2αT + 1 − 2e−αT + 2αTe−αT − 2αT + α2T 2
]
q13 =1
2α3
[1 − e−2αT − 2αTe−αT
]
q22 =1
2α3
[4e−αT − 3 − e−2αT + 2αT
]
q23 =1
2α2
[e−2αT + 1 − 2e−αT
]
q33 =1
2α
[1 − e−2αT
].
517
![Page 5: [IEEE 2009 IEEE 34th Conference on Local Computer Networks (LCN 2009) - Zurich, Switzerland (2009.10.20-2009.10.23)] 2009 IEEE 34th Conference on Local Computer Networks - Energy-efficient](https://reader030.pdfslide.net/reader030/viewer/2022020407/5750823e1a28abf34f97fe50/html5/page/5.jpg)
TABLE I
PARAMETERS USED IN OUR SIMULATIONS
Transmission power 3 dBmNoise floor -90 dBm
Detection threshold -81 dBmPath loss exponent, β 3
Carrier frequency 2.4 GHzBitrate 250 kbps
Reciprocal of maneuver time, α 30 HzMeasurement noise variance, σ2
n 2 m2/s2
Error detection threshold, εTh 5Nominal load per sink, λ 5 pk/s/sink
MAC buffer size 16BEB Initial contention window 32 slots
Short Retry Limit - AODV, Geo, MPR 5, 4, 4Slot, DIFS, SIFS duration 20, 128, 28 μ s
Carrier Sense threshold, ΛCS -86 dBmContention Window for next hop selection, CW 16 slots
Payload 512 bitHeader, ACK, Control Packets 42, 96, 112 bit
is a protocol parameter that specifies the contention windowfor the selection of a next hop. The node, then, starts a backoffof duration m slots and senses the aggregate power level onthe medium P . If P exceeds the carrier sense threshold ΛCS ,the node assumes that another terminal has won the contentionand goes back to its activity. On the contrary, if the backoffinterval expires and P remains below ΛCS , the candidate isselected as data forwarder and replies to the sink with anacknowledgement (ACK) message.2
Once this first hop has been accomplished, basic geographicrouting can be performed within the static WSN in order todeliver data to the source. The terminal in charge to forwardthe STATE-UPDATE message, after a carrier sense based BEB,transmits the packet to its neighbors. Nodes that decode theframe perform the distributed contention described earlier toidentify the next hop which is closest to the source, which inturn replies with an ACK and iterates the procedure until thethe final addressee of the message is reached.
Finally, upon receiving a STATE-UPDATE message froma sink, the source can start processing packets addressed toit. In particular, when a data frame has to be delivered to amobile node, S applies the algorithm described in Section IVto predict the current location of the addressee. This infor-mation is then included in the packet and the aforementionedgeographic routing procedures take place to deliver data to thesink through the static WSN.
VI. SIMULATION RESULTS
In order to test the effectiveness of the proposed solution,extensive Omnet++ [13] simulations have been performed.In our studies, we have considered wireless sensor networkscomposed by 36 static nodes spread in a 6×6 regular gridover a 100×100 m2 area and by one or more sinks movingwithin the region. The motion of the nodes has been modeled
2If the source is able to decode the STATE-UPDATE, it immediately replieswith an ACK, i.e., n = 0, in order to avoid routing procedures that would beuseless and expensive in terms of energy consumption.
as discussed in Section IV. In particular, the reciprocal ofthe maneuver time, α, has been set to 30 Hz. Such a valueis suitable to describe the movement of both pedestriansand human-driven vehicles, and is thus of interest for manypotential applications. Poisson traffic addressed to the mobilesinks with intensity λ = 5 packets/s/sink is injected in thenetwork by a single source, located at the upper-left corner ofthe grid.
The Mobility Prediction Routing protocol has been com-pared to two benchmark schemes: AODV and basic geographicrouting (Geo). In the latter approach, mobile sinks periodicallytransmit beacons containing an estimate of their current loca-tion. Let us remark that while STATE-UPDATE messages inMPR contain the Kalman filter estimate xk, in Geo the rawnoisy measurement of the current position zk are includedin beacons. Such frames are forwarded towards the sourceaccording to the procedure described in Section V. In turn,whenever a new data packet has to be delivered, the sourcetriggers the plain geographic routing algorithm assuming theaddressee to be located at the position indicated in the lastreceived beacon, i.e., no prediction is performed.
All the schemes rely on a carrier sense based medium accesspolicy with BEB. In order to have a fair comparison, wehave tuned the Short Retry Limit (SRL) parameter [12] soas to achieve a similar reliability for the different protocolsunder static conditions (i.e., when sinks are not moving). Inparticular, the SRL has been set to 5 for AODV, whereas4 attempts were sufficient for basic geographic routing andMPR, due to the shorter average length of the routes packetshave to undergo to reach a sink.
The wireless environment is subject to correlated Rayleighfading and path loss with coefficient β = 3. The standard setof network and protocol parameters used in our studies arereported in Tab. I.
MPR and its competitors have been studied in two differentscenarios. In the former, a single sink was present in thenetwork, and the behavior of the protocols has been analyzedunder different mobility conditions. This was accomplished byvarying the parameter σa (see Section IV), which representsthe standard deviation of the acceleration of a sink, andhence gives an indication of how quickly a node can vary itsspeed and thus its trajectory. This investigation is of particularinterest since it sheds light on the robustness of the consideredrouting policies to user mobility and tests their adequacy todifferent applications. Furthermore, the protocols have beenassessed in networks with multiple sinks sharing the samemobility parameters. Such a scenario is apt to evaluate how theschemes respond to higher traffic loads and how they behaveunder harsh channel contention conditions.
All the results presented in this paper have been obtainedby averaging the outcome of 50 independent simulations, each1000s long, which provided the desired statistical confidence.
A. Networks with a single mobile sink
Let us start our analysis by considering the response of theprotocols to different mobility conditions when a single sink
518
![Page 6: [IEEE 2009 IEEE 34th Conference on Local Computer Networks (LCN 2009) - Zurich, Switzerland (2009.10.20-2009.10.23)] 2009 IEEE 34th Conference on Local Computer Networks - Energy-efficient](https://reader030.pdfslide.net/reader030/viewer/2022020407/5750823e1a28abf34f97fe50/html5/page/6.jpg)
0 5 10 1550
55
60
65
70
75
80
85
90
95
100
σa [m/s2]
PD
R (
%)
AODVGeo − beacon interval 1sGeo − beacon interval 3sGeo − beacon interval 5sMPR
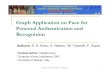
Fig. 4. Packet delivery ratio as a function of the standard deviation of thesink acceleration σa.
is present. The first performance criterion that we assess is theend-to-end Packet Delivery Ratio (PDR), defined as the ratio ofthe number of data packets injected in the network to the num-ber of frames successfully received at the intended addressee.The metric is depicted against the standard deviation of thesink acceleration σa in Fig. 4. As expected, when the mobileuser is static or quasi-static (e.g., for low accelerations), all theconsidered schemes provide a good reliability of about 95%.On the contrary, higher values of σa induce a performanceloss for the protocols. As for AODV, this can be explainedconsidering the static routing approach it relies on. Accordingto this, a path to the destination is composed by a set offorwarding nodes identified by means of a broadcast-basedroute discovery procedure. However, as soon as the sinkmoves out of the communication range of the last node in theidentified sequence, the whole route collapses, and data cannotbe delivered until a new path to the destination is establishedthrough route recovery. Such a condition occurs more oftenas the value of σa increases, with detrimental effects on theoverall reliability (up to 10% loss for high acceleration). Thisdrawback can be partially mitigated by applying geographicrouting. Indeed, such a strategy can be robust to user mobilityprovided that sinks send out beacons with position updateswith sufficient high frequency. In particular, Fig. 4 highlightsthat, for the topologies under study, a beacon interval of 1second leads to a constant reliability for pedestrian or vehiclemovement up to moderate speeds, whereas the performancestarts to slightly degrade only for higher values of σa. Theimprovement offered by geographic routing stems from thecapability of the beaconing mechanism to provide the sourcewith an estimate of the current position of the sink. Thisknowledge is exploited to track the destination and, unlikein AODV, to pre-emptively adapt the path frames have toundergo, thus reducing the number of packet losses. However,such a strategy is extremely sensitive to the accuracy of thelocation estimate available at the source. In fact, as soon asthis information does not reflect the actual position of the
0 5 10 1560
70
80
90
100
110
120
130
140
σa [m/s2]
Tra
nsm
issi
on e
nerg
y co
nsum
ptio
n pe
r de
liver
ed b
it [n
J/bi
t]
AODVGeo − beacon interval 1sGeo − beacon interval 3sGeo − beacon interval 5sMPR
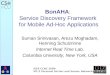
Fig. 5. Transmission energy consumption per successfully delivered data bitas a function of the standard deviation of the sink acceleration, σa.
addressee, either due to the loss of some updates or becausethe beaconing frequency is not high enough with respect tothe mobility pattern of the sink, data deliveries fail, sincepackets are forwarded using an inappropriate route. This isclearly shown in Fig. 4, where the curves for geographicrouting with beaconing interval of 3 and 5 seconds plummetas σa increases. From these observations we can infer thatthe robustness against sink mobility that can be achieved bymeans of basic geographic routing comes at the expense of ahigh beaconing frequency, which in turn increases overheadand energy consumption in the network, as will be discussedlater. Let us now focus, instead, on the MPR protocol. Theplot highlights that our scheme offers high PDR for all theconsidered values of σa and is thus able to overcome the issuesthat affect basic geographic routing. This capability stems fromtwo aspects. First of all, as discussed in Section IV, MPRadapts the beaconing interval to the mobility pattern of thesink. Therefore, the source always has at its disposal an upto date estimate of the destination’s position and can reliablytransfer data even for high values of σa. Secondly, with theproposed strategy, packets for the sink are routed towards theexpected current location of the addressee obtained by meansof the prediction algorithm rather than towards the positioncontained in the last received STATE-UPDATE, thus handlingpotential movements of the sink between successive beacons.
The second performance criterion that we consider is trans-mission energy consumption, which is of key importance inbattery constrained WSNs. The metric is defined as the ratioof the transmission energy consumed by all the nodes in thenetwork to the number of successfully received informationbits at the sink, and is depicted against the standard deviationof the acceleration in Fig. 5. Let us start by focusing on thebehavior of the different protocols for low values of σa, i.e.,when all the schemes offer the same level of reliability, asshown in Fig. 4. As a first remark, we notice that AODVconsumes less energy than basic geographic routing. In suchconditions, sink mobility seldom induces failures in the paths
519
![Page 7: [IEEE 2009 IEEE 34th Conference on Local Computer Networks (LCN 2009) - Zurich, Switzerland (2009.10.20-2009.10.23)] 2009 IEEE 34th Conference on Local Computer Networks - Energy-efficient](https://reader030.pdfslide.net/reader030/viewer/2022020407/5750823e1a28abf34f97fe50/html5/page/7.jpg)
established by AODV, and therefore the overhead relatedto route construction and route recovery is limited. On thecontrary, the periodic beaconing approach followed by thegeographic routing solution enforces the network to processcontrol messages even when not needed because the sink isnot moving, and thus yields a higher energy consumption.Remarkable energy savings over both the strategies can beachieved by using MPR: as proven by Fig. 5, our protocoloffers improvements of about 15% over AODV and of up to30% with respect to basic geographic routing. Not only is thethe proposed solution able to avoid the overhead due to pathconstruction and recovery procedures that affects static routingalgorithms, but it also saves energy by triggering STATE-UPDATE messages only when needed in order to preservereliability. The beneficial effects of MPR become ever morepronounced for higher values of σa. Indeed, faster and moredynamic mobility patterns of the sink negatively affect bothAODV and geographic routing: the former approach has toface more frequent route failures with a subsequent increase inthe control traffic overhead, while the latter schemes undergo asteady drop in reliability and thus tend to spend more energy tosuccessfully deliver a packet to the sink. Instead, MPR exhibitsjust a slight raise in energy consumption even in such harshconditions for routing protocols. This stems once again fromthe capability of the proposed solution to minimize the trafficrequired to reliably track the sink by matching the frequency ofSTATE-UPDATE transmissions to the actual movement patternof the mobile station.
In conclusion, by jointly considering the results of Figs. 4and 5, we can infer that the MPR protocol is able to offerboth higher reliability and significantly reduce energy con-sumption, thus prolonging network lifetime, with respect toother conventional routing solutions for mobile WSNs, andthus appears to be a suitable solution for a large number ofapplication scenarios.
B. Networks with multiple mobile sink
We have also tested the behavior of MPR and its competitorsin networks with multiple sinks sharing the same mobilityparameters. In this study, the standard deviation σa of theacceleration has been set to 4 m/s2. Such a value describes apedestrian movement, and is thus of interest for many potentialapplications, e.g., [4].
The first metric that we consider is the average end-to-endpacket delivery ratio, depicted against the number of mobilesinks in the network in Fig. 6. As a general remark, we noticethat all the schemes incur a performance loss when moredestinations have to be served. Indeed, not only does a largernumber of sinks involve a higher network load in terms ofdata packets that have to be delivered, but it also augments thecontrol traffic needed to establish and keep a connection withthe mobile nodes. In turn, this traffic growth leads to a harsherchannel contention and to an increased interference level, thusworsening the link reliability and the end-to-end PDR. It isalso interesting to observe how this effect is more pronouncedfor basic geographic routing than for AODV. This can be
2 4 6 8 10 12 1460
65
70
75
80
85
90
95
100
# Mobile Sinks
PD
R (
%)
AODVGeo − beacon interval 1sGeo − beacon interval 3sGeo − beacon interval 5sMPR
Fig. 6. Packet delivery ratio as a function of the number of mobile sinks inthe network. σa is set to 4 m/s2 (pedestrian movement) for all the sinks.
explained considering the low sink mobility in our simulations.As discussed earlier, in these conditions AODV does notexperience frequent route failures. Therefore, once a pathtowards a destination has been established (via a broadcast-based route construction procedure), further control traffic isnot likely to be triggered often. On the contrary, the beaconingapproach followed by geographic routing continuously pourscontrol messages in the network even when not necessary,e.g., because a sink is standing still, thus leading to a quickertraffic congestion. Clearly, the higher the beacon frequency, themore detrimental this effect. As opposed to its competitors,MPR exhibits a more graceful degradation of the networkperformance, as shown in Fig. 6, where our protocol achievesa PDR higher than 90% even when more than 10 sinks arepresent and outperforms AODV by almost 10% and basicgeographic routing by as much as 20%. This remarkable resultis once again due to the ability of the proposed solution to bothavoid route construction procedures and minimize the numberof STATE-UPDATE messages generated by each mobile node,thus significantly reducing the congestion in the network.
Another metric of interest is represented by the average end-to-end latency per successfully delivered data packet, depictedas a function of the number of mobile sinks in the network inFig. 7. When a single destination has to be served, geographicrouting based approaches, i.e., Geo and MPR, are able to al-most halve the latency with respect to AODV. This stems fromthe capability of these schemes to exploit location informationto forward data without resorting to the broadcast-based andtime consuming route construction procedures that are insteadneeded by static routing protocols. On the other hand, thehigher level of traffic triggered by the presence of multiplesinks in the network increases the delivery delay for all theschemes, due to both the longer average backoffs requiredto access the channel and to longer queueing time spent bypackets at each hop. Nevertheless, Fig. 7 emphasizes thatMPR is able to contain this performance loss, outperformingAODV by more than 50% (avoidance of route construction
520
![Page 8: [IEEE 2009 IEEE 34th Conference on Local Computer Networks (LCN 2009) - Zurich, Switzerland (2009.10.20-2009.10.23)] 2009 IEEE 34th Conference on Local Computer Networks - Energy-efficient](https://reader030.pdfslide.net/reader030/viewer/2022020407/5750823e1a28abf34f97fe50/html5/page/8.jpg)
2 4 6 8 10 12 140
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
# Mobile Sinks
Late
ncy
[s]
AODVGeo − beacon interval 1sGeo − beacon interval 3sGeo − beacon interval 5sMPR
Fig. 7. Average delivery latency as a function of the number of mobile sinksin the network. σa is set to 4 m/s2 (pedestrian movement) for all the sinks.
procedures) and basic geographic routing by up to 80% when15 destinations join the network (minimization of beaconingtraffic).
In conclusion, the MPR protocol does not only offer highreliability even when the network has to support a high levelof traffic, but also it is able to deliver information to multiplemobile sinks much quicker than its competitors, which makesit particularly suitable for all the applications that have tightconstraints in terms of latency.
VII. CONCLUSIONS
In this paper we have presented a novel protocol for effi-ciently and reliably routing data packets from a static informa-tion source to mobile sinks through a multi-hop wireless sensornetwork. Mobile nodes estimate their state (geographic loca-tion, velocity and acceleration) starting from noisy positionmeasurements by means of a Kalman filter, and transfer suchinformation to the source with STATE-UPDATE messages.Exploiting this knowledge, the source is able to continuouslypredict the location of the sink, and geographic routing isperformed to efficiently route data packets through the sensorfield to the mobile destination. Moreover, in order to minimizethe overhead in the network, STATE-UPDATE messages arenot periodically sent, but only if the Euclidean norm of theerror between the predicted state and the state estimated bythe Kalman exceeds a pre-defined threshold.
By means of extensive simulations, we have shown thatthe proposed scheme is robust to both user mobility and thenumber of mobile sinks that have to be served. The capabilityof our solution to take advantage of mobility prediction whileminimizing the control overhead leads to significant gains overrouting strategies that are commonly used in wireless sensornetworks in terms of reliability, energy efficiency, and deliverylatency.
REFERENCES
[1] C. Perkins and E. Royer, “Ad-hoc On Demand Distance Vector routing,”in IEEE WMCSA, New Orleans, LA, US, Feb. 1999.
[2] D. Johnson, D. Maltz, and J. Broch, DSR: The dynamic source routingprotocol for multi-hop wireless ad hoc networks, ser. Ad Hoc Network-ing. Addison-Wesley, 2001.
[3] C. Chen and J. Ma, “Mobile enabled large scale wireless sensornetworks,” in IEEE ICACT, Phoenix Park, KR, Feb. 2006.
[4] P. Coronel, S. Furrer, W. Schott, and B. Weiss, “Indoor location trackingusing inertial navigation sensors and radio beacons,” in The Internet ofThings (IOT 2008), LNCS 4952, Springer, Zurich, Switzerland, March2008.
[5] D. Tacconi, I. Carreras, D. Miorandi, F. Chiti, and R. Fantacci, “Sup-porting the sink mobility: a case study for wireless sensor networks,” inIEEE ICC, Glasgow, UK, June 2007.
[6] M. Zorzi and R. R. Rao, “Geographic random forwarding (GeRaF) forad hoc and sensor networks: multihop performance,” IEEE Transactionson Mobile Computing, vol. 2, no. 4, pp. 337–348, 2003.
[7] F. Ye, H. Luo, J. Cheng, S. Lu, and L. Zhang, “A two tier datadissemination model for large-scale wireless sensor networks,” in ACMMobiCom, Cologne, Germany, Aug. 2005.
[8] Q. Chen, S. Kanhere, M. Hassan, and K. Lan, “Adaptive position updatein geographic routing,” in IEEE ICC, Istanbul, Turkey, June 2006.
[9] B. Karp and H. Kung, “GPSR: Greedy Perimeter Stateless Routing forwireless networks,” in ACM Mobicom, Boston, MA, June 2000.
[10] R. Singer, “Estimating optimal tracking filter performance for mannedmaneuvering targets,” in IEEE Transactions on Aerospace and Elec-tronic Systems, Vol. 6, July 1970.
[11] P. Maybeck, Stochastic models, estimation and control, 2nd ed. Aca-demic Press, New York, 1979.
[12] IEEE LAN MAN Standards, Part 11: Wireless LAN Medium AccessControl (MAC) and Physical Layer (PHY) specifications High-speedPhysical Layer in the 5 GHz Band”, ANSI/IEEE Std., September 1999.
[13] A. Varga, “Omnet++,” http://www.omnetpp.org, 2001.
521