Embed Size (px)
Citation preview
![Page 1: [IEEE 2010 International Power Electronics Conference (IPEC - Sapporo) - Sapporo, Japan (2010.06.21-2010.06.24)] The 2010 International Power Electronics Conference - ECCE ASIA - -](https://reader035.pdfslide.net/reader035/viewer/2022073110/575093151a28abbf6bacfdea/html5/thumbnails/1.jpg)
Abstract--Multi-phase Permanent Magnet Synchronous Motors (M-PMSM) have the many advantages over conventional 3-phases PM ones. Their feasibilities and performances are described and proven in many literatures. M-PMSM is useful for large systems such as electrical ship propulsion, locomotive traction or electrical vehicles applications. Characteristics of Independent Multi-phase Permanent Magnet Synchronous Motor (IM-PMSM) are similar to M-PMSM, but the control concept is considerably different. IM-PMSM has basic problems that multiple three harmonics are generated at each phase due to the structure of the separated windings. The main goal of this paper is developing the drive system of IM-PMSM, proving the cause of harmonics and proposing a new method to eliminate harmonics.
Index Terms-- independent multi-phase motor (IM-PMSM), multiple d-q-n space concept, third harmonic, dead-time, current distortion
I. INTRODUCTION
Multi-phase (more than 3-phases) Permanent Magnet Synchronous Motors (M-PMSM) have been studied for a long time. But it is only recently that they have attracted a considerable amount of interest in the research community and industry worldwide [1]. M-PMSM is useful for large systems such as ship of electrical propulsion, locomotive traction or electrical vehicles applications, because it has the many advantages over conventional 3-phases such as reducing the amplitude of torque pulsation, lowering the DC link current harmonics, higher reliability and decreasing the current stress of switching devices [2]-[8]. Likewise, when one of the power switches or windings is faulted, the average torque loss is less than conventional motors [3]. In case of high-capacity M-PMSM, composition of inverter system is possible by switching devices of small capacity, since the controlled power is divided on several inverter legs [9][10].
Characteristics of Independent Multi-phase Permanent Magnet Synchronous Motors (IM-PMSM) are similar to M-PMSM, but the control concept is considerably different. IM-PMSM's utility factor of voltage is higher than M-PMSM. Although failure of any one phase-drive unit does degrade motor performance somewhat, the urgency of immediate repairs is reduced since system shutdown is not required [11].
Voltage Source Inverter (VSI) to control motors generate harmonics due to dead-time and nonlinear characteristics of the switching devices and etc. The dead-time problem of the conventional 3-phases machine
has already been investigated in the several technical literatures, and various solutions have been tried [23].
Therefore, in this paper, not only vector control method based on a multiple d-q-n spaces concept but also a new dead-time compensation method are proposed to reduce the harmonics due to the dead time and nonlinear characteristics of the switching devices. The simulation and experimental results are presented to verify the proposed methods.
II. INDEPENDENT SIX-PHASE PMSM Independent Six-phase Permanent Magnet
Synchronous Motor (IS-PMSM) has six stator windings spatially shifted by 60 electrical degrees with virtual separated neutral points as shown in Fig. 1. Moreover, inverter is composed by separated six H-bridge inverters as shown in Fig. 2. The IS-PMSM's back-EMFs are sinusoidal waveforms as shown in Fig. 3.
Fig. 1. Stator equivalent circuit of IS-PMSM
0 Vdc
+
a-phase b-phase f-phase
A B F
Sa1
Sa2
Sa3
Sa4
Sb1
Sb2
Sb3
Sb4
Sf1
Sf2
Sf3
Sf4
VAH VAL VBH VBL VFH VFL
Fig. 2. Independent Six-phase Inverter
Vector Control and Harmonic Ripple Reduction with Independent Multi-phase PMSM
Chae-Bong Bae*, Young-Gook Kim*, Jang-Mok Kim*, Hyun-Cheol Kim** * Pusan National University, Busan, Korea
** Agency for Defense Development, Chin hae, South Korea
1056
The 2010 International Power Electronics Conference
978-1-4244-5393-1/10/$26.00 ©2010 IEEE
![Page 2: [IEEE 2010 International Power Electronics Conference (IPEC - Sapporo) - Sapporo, Japan (2010.06.21-2010.06.24)] The 2010 International Power Electronics Conference - ECCE ASIA - -](https://reader035.pdfslide.net/reader035/viewer/2022073110/575093151a28abbf6bacfdea/html5/thumbnails/2.jpg)
e a
0 π31 π 3
2 π 34 π 3
5 π π2
0
e b e c e d e e e f
Fig. 3. Back-EMF of IS-PMSM
A. Mathematical modeling of IS-PMSM IS-PMSM's voltage equation and matrix A and B can
be represented in (1) and (2) where the sum of self-inductance and mutual-inductance are assumed to be synchronous inductance L.
x x x xdv Ai B i edt
= + + (1)
0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0
R LR L
R LA B
R LR L
R L
= =
Where x means specific phase, ex, ix and R are each phase's back-EMF, current and stator winding's resistance, respectively. The electrical torque is equal to mechanical torque if the stator losses are neglected in this analysis. So, output torque equation can be expressed as in (3).
6a a b b c c d d e e f fe s se
m m m
e i e i e i e i e i e iP E ITω ω ω
+ + + + += = = (3)
Where Pe , Es Is , and m are the electrical power, RMS of back-EMF, RMS of current and mechanical angular velocity of motor, respectively. The torque equation of the rotational motion can be expressed as in (4).
me m m m L
dT J B Tdtω ω= + + (4)
Where Jm , Bm and TL are the inertia of the rotor, static coefficient of friction and load torque, respectively. Fig. 4 shows IS-PMSM's block diagram that execute Laplace-Transform using the equations from (1) to (4).
Fig. 4. Block diagram of IS-PMSM
B. Transformation of IS-PMSM Six-phase space vector can be equivalently represented
by the following three-dimensional (3-D) complex space vector as shown in (5) and (6). d-axis is real axis, q-axis is a imaginary axis. d-q axes are related to output torque, but n-axis which is at right angle to both ds axis and qs
axis is loss element in the motor.
0 1 2 3 4 5
3
1 ( )3
n a b c d e f
s s sd q dq
j
f a f a f a f a f a f a f
f jf f
where a eπ
= − + − + −
= + =
=
(5)
1 ( )6n a b c d e ff f f f f f f= − + − + − (6)
Because Y-connected motors do not have (6n ± 3)thharmonics which in-phase at the each phase [12][13], not only sum of each phase variable, but also n-axis is always zero. However, independent-connected motor has (6n ± 3)th harmonics which in-phase at the each phase. Therefore, sum of each phase variable is not always zero, and then n-axis is not always zero. From (5), the space vector on the synchronously rotating reference frame can be defined as follows:
eje sdqs dqsf f e θ−≡ (7)
sdf
sfsq
f
saxisd
edf
eaxisd
eqf
θ
eaxisq
saxis
q
Fig. 5. Stationary reference frame and Synchronous reference frame
C. Switching method Space Vector PWM (SVPWM) technique is widely
used to control three-phase motors [24][25]. SVPWM can apply to IS-PMSM. Switching equation given to (8) because two switches in one pole between poles of H-bridge are alternately operated as (9). Moreover, the number of output voltage vectors is 729(36) as shown in TABLE I and Fig. 6 because there are 24 switches in the inverter as shown in Fig. 2.
3 21 41 32 2
{1,0, 1)
HB
HB
S SS SS S S
S
−−= − = −
∈ −
1 4
2 3
S S
S S
=
=
(2)
(8)
(9)
1057
The 2010 International Power Electronics Conference
![Page 3: [IEEE 2010 International Power Electronics Conference (IPEC - Sapporo) - Sapporo, Japan (2010.06.21-2010.06.24)] The 2010 International Power Electronics Conference - ECCE ASIA - -](https://reader035.pdfslide.net/reader035/viewer/2022073110/575093151a28abbf6bacfdea/html5/thumbnails/3.jpg)
TABLE I. PHASE VOLTAGES AND VOLTAGE VECTORS OF IS_PMSM
Fig. 6. Switching Vectors of IS-PMSM
However, because IS-PMSM's back-EMFs are continuous, if voltage vectors which are discontinuous and smaller than maximum magnitude (4/3)Vdc are removed, voltage vectors can be rearranged for 6 active voltage vectors and 2 zero voltage vectors as shown in TABLE II and Fig. 7.
TABLE II. PHASE VOLTAGES AND VOLTAGE VECTORS OF IS_PMSM
0.5
1
1.5
30
210
60
240
90
270
120
300
50
330
Sector1
Sector2
Sector4
Secto
r3
Sector5
Secto
r6
V1
V2V3
V4
V5 V6
V*
Fig.7. Six active voltage vectors
For example, a d-q axes reference voltage vector(V*)is located in sector 1, as shown in Fig. 7, switching signals can be expressed like Fig. 8.
Sa1
Sa2
Sc1
Sc2
Se1
Se2V0 V1 V2 V7 V7 V2 V1 V0
T2 T1T02
T02
T02
T02 T1 T2
Ts
Sd1
Sd2
Sf1
Sf2
Sb1
Sb2V0 V1 V2 V7 V7 V2 V1 V0
T2 T1T02
T02
T02
T02 T1 T2
Ts
(a) a, c, e phase (b) b, d, f, phase
Fig. 8. Switching signals when d-q axes reference voltage vector is located in sector 1
There is a problem that switching signals are necessarily discontinued during one sampling period in all sectors as shown in Fig. 8. So in this paper, unipolar SPWM is used to control IS-PMSM. In case of M-PMSM, utility factor of voltage of SPWM approach 61.2% of the DC link voltage (compared to SVPWM’s 70.7%) in the linear modulation range [24], because maximum phase voltage is (k-1/k)Vdc (but only under the condition of that k is phase-number and Vdc is DC link voltage). But in case of IS-PMSM, utility factor of voltage of SPWM approach 70.7% because maximum phase voltage is Vdc.So SPWM is more suitable for IS-PMSM. Output voltage (Vout) frequency of a unipolar SPWM becomes double when compared to fundamental frequency because Vout is twice a period of the carrier waveform as shown in Fig. 9. Therefore, THD (Total Harmonic Distortion), iron loss and current pulsation are lower than bipolar SPWM [16].
0 π π2
Vdc
-Vdc
Carrier waveformVH
*-VL
*
Vdc
-Vdc
VoutLVout VH V
1γ 7γ
tω
tω
Fig.9 . Unipolar SPWM waveform
III. ANALYSIS OF VOLTAGE DISTORTION OF PWM INVERTER
In PWM VSI, there is voltage distortion caused by dead-time and nonlinear characteristics of the switching devices. Also the clamping phenomenon of current around zero crossing point, called Zero-Current-Clamping (ZCC), affects voltage distortion because the phase current flows through the bottom/top diode during the dead-time [25]. It is convenient to analyze the dead-time effects from one phase leg of the inverter and extend the results to the other phase legs [21]. In case of Y-connection, Fig. 10 shows the average voltage distortion based on dead-time, turn-on/off delay time of switching devices and sampling period. Independent-connection of IS-PMSM is shown in Fig. 11.
1058
The 2010 International Power Electronics Conference
![Page 4: [IEEE 2010 International Power Electronics Conference (IPEC - Sapporo) - Sapporo, Japan (2010.06.21-2010.06.24)] The 2010 International Power Electronics Conference - ECCE ASIA - -](https://reader035.pdfslide.net/reader035/viewer/2022073110/575093151a28abbf6bacfdea/html5/thumbnails/4.jpg)
(Ideal)
(Real)
(Real)
(Ideal)
Sa
(Real)Van
Van
Van
Sa
Sa
Sa
Td + Ton Toff
T d + TonT off
T s T s
T d Td
ias 0
i as 0
Fig. 10. Switching patterns and output voltages of inverter of the conventional 3phase motor (Y-connected)
S4
S1
VH
S3
S2
VL
Vo
Td + TonToff
Td Td
Td + Ton Toff
Td + Ton
ToffToff
Td + Ton
Ts Ts
Td Td
ias 0
Fig. 11. Switching patterns and output voltages of inverter of IS-PMSM (Independent-Connected)
In case of Y-connection, the average distorted voltage (� V3y) according to the direction of the phase current (ias) can be represented in (10)[23].
3
3
, 02
, 02
d on offy dc
s
d on offy dc
s
T T TV V i
TT T T
V V iT
− − +Δ = >
+ −Δ = <
(10)
In case of independent-connection, average distorted voltage (� V1) is (11).
, 0
, 0
d on offI dc
s
d on offI dc
s
T T TV V i
TT T T
V V iT
− − +Δ = >
+ −Δ = <
(11)
Where, Ts, Td, Ton, Toff are sampling period, dead-time, turn-on and turn-off delay time. In case of Y-connection, the average voltage distortions may be expressed according to the direction of the respective phase currents as shown in (12).
3_
3_
3_
2 ( ) ( ) ( )2 3
2 ( ) ( ) ( )2 3
2 ( ) ( ) ( )2 3
d on offy as bs csas err dc
s
d on offy bs cs asas err dc
s
d on offy cs as bsas err dc
s
T T T sign i sign i sign iV VT
T T T sign i sign i sign iV VT
T T T sign i sign i sign iV VT
+ − − −=
+ − − −=
+ − − −=
IS-PMSM can be expressed like (13). From this equations, the average of the distorted voltage is large than the average of the distorted voltage of the Y-connected motor as shown in (12).
{ }
{ }
{ }
_
_
_
( )
( )
( )
d on offas err dc as
s
d on offbs err dc bs
s
d on offfs err dc fs
s
T T TV V sign i
TT T T
V V sign iT
T T TV V sign i
T
− − +=
− − +=
− − +=
(13)
Fig. 12 and Fig. 13 express waveforms of the (12) and (13), respectively.
vas_err
ias
vbs_err
vcs_err
ibs
ics
3 Δ V2
3 Δ V4 3 Δ V2
3 Δ V43 π2
3 π4
tω
tω
tω
Fig. 12. Phase current and distorted phase voltage waveforms in Three- phase (Y-Connected)
vas_err
vbs_err
vfs_err
ias
ibs
ΔV
ΔV
ΔV
ΔV
ΔV
ΔV
6 π2
6 π10
ifs
tω
tω
tω
Fig. 13. Phase current and distorted phase voltage waveforms in Six- phase. (Independent-Connected)
The distorted voltages of each phase of IS-PMSM using the FFT can be represented in (14). Each phase doesn’t affect.
_4 1 1 1sin sin 3 sin5 sin 7
3 5 7xs errV V t t t tω ω ω ωπ
= Δ + + + + (14)
(12)
1059
The 2010 International Power Electronics Conference
![Page 5: [IEEE 2010 International Power Electronics Conference (IPEC - Sapporo) - Sapporo, Japan (2010.06.21-2010.06.24)] The 2010 International Power Electronics Conference - ECCE ASIA - -](https://reader035.pdfslide.net/reader035/viewer/2022073110/575093151a28abbf6bacfdea/html5/thumbnails/5.jpg)
From (14), distorted current based on load impedance ZL(n mm) and load impedance angle n can be acquired like (15).
( ) ( )
( ) ( )
1 3
_
5 7
1 1sin sin3( ) 3 (3 )41 1sin5 sin7
5 (5 ) 7 (7 )
L Lxs err
L L
t tZ Z
I Vt t
Z Z
ω φ ω φω ω
π ω φ ω φω ω
− + −= Δ
+ − + − +
2 2
1
( ) ( )
tan
L e e
en
Z n R jnw L R jnw Lnw L
R
where ω
ψ −
= + = +
=
IV. DETECTION AND COMPENSATION OF DISTORTED CURRENT
A. Selection of control signal for compensation Assuming that 3th, 9th, 15th harmonics that low
harmonics at (6n ± 3)th harmonics are generated since dead-time and nonlinear characteristics of the switching devices exist at each phase current, total current equations as followings.
3 9 15
3 9
15
3 9
15
sin sin3 sin9 sin15
sin sin3 sin93 3 3
sin153
5 5 5sin sin3 sin93 3 3
sin15
as m a a a
bs m b b
b
fs m c c
c
i I t I t I t I t
i I t I t I t
I t
i I t I t I t
I
ω ω ω ωπ π πω ω ω
πω
π π πω ω ω
= − + + +
= − − + − + −
+ −
= − − + − + −
+ 53
t πω −
Where Ih3, Ih9, Ih15 are magnitude of 3th, 9th, 15thharmonics. If (16) is transformed into ds-qs-ns axes, the current of stationary reference frame ds-qs axes don't have harmonics, but the current of ns axis has the harmonics equal to the sum of harmonics in current of each phase like (17).
{ }
{ }
{ }3 9 15
1 2 26
sin
1 cos2 3
16
sin 3 sin 9 sin15
sds as bs cs ds es fs
m
sqs bs cs es fs m
sns as bs cs ds es fs
h h h
i I I I I I I
I t
i I I I I I t
i I I I I I I
I t I t I t
ω
ω
ω ω ω
= + − − − +
= −
= + − − =
= − + − + −
= + +
(17)
Likewise, synchronous reference frame de-qe axes are ideal as well as stationary reference frame like (18).
( ) ( )( ) ( )
cos sin 0
sin cos
e s sds e ds e qs
e s sqs e ds e qs m
e sns ns
I t i t i
I t i t i I
i i
ω ω
ω ω
= + =
= − + =
=
(18)
Therefore, sum of the (6n ± 3)th harmonics in each phase is easily detected by d-q-n reference frame transformation.
B. The proposed compensation method Fig. 14 shows the proposed compensation method to
detect and compensate the distorted real currents. The detected (6n ± 3)th harmonics through the d-q-n reference frame transformation are controlled to zero by the proposed compensator.
Stator current & Electrical angle
a b c d e f eθ
dqs*
xspK
Synchronous DQ-axis Current Regulators
nsi
dqsi
dqs_ffv
nsi *
SPWM
Independent Multi-PhasePMSM
xsie
e
nsie
e
dqsie
dqsie*
e*
v e*ev
ns*v e
sKi
eθ
eθ
Encoder
Proposed Current Pulsation Compensator
pK
2462
2
22
2
2ns_ffv e* =0
dsi e
qsi e
nsi e
Synchronous Frame
eθ(6n 3)=
2
Independent Multi-PhaseInverter
3 6
d-q-nTransform
A
B
C
D
E
F
sN
VDC
6
3 6
d-q-nTransform
Dead time TΔ
Fig. 14. Block diagram of applied current pulsation compensation algorithm.
The compensation voltage (vns)* generated by
compensator is added to each phase reference voltage like (19).
*
*
*
*
* * *
* * *
* * *
* * *
* * *
* * *
1 32 21 32 2
1 32 21 32 2
s sa d n
s s sb q nd
s s sc q nd
s sd d n
s s se q nd
s s sf q nd
v v v
v v v v
v v v v
v v v
v v v v
v v v v
= +
= + −
= + +
= −
= − +
= − −
V. SIMULATION RESULT
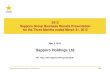
The proposed compensation method is simulated when distortion element is inserted into IS-PMSM at the rotor speed is 100[rpm]. Fig. 15 shows simulation waveform. Distortion of phase current is improved after start of compensation and maximum value of phase current is reduced. As known from Fig. 15 (b) and (c), the currents of the synchronous reference frame have no ripple component. The A phase current harmonics spectrum by FFT are shown in Fig. 16. After compensation, THD decreases from 26.1% to 0.1% because (6n ± 3)thharmonics are dispersed.
(15)
(16)
(19)
1060
The 2010 International Power Electronics Conference
![Page 6: [IEEE 2010 International Power Electronics Conference (IPEC - Sapporo) - Sapporo, Japan (2010.06.21-2010.06.24)] The 2010 International Power Electronics Conference - ECCE ASIA - -](https://reader035.pdfslide.net/reader035/viewer/2022073110/575093151a28abbf6bacfdea/html5/thumbnails/6.jpg)
(a) Phase currents (b) qes-axis current,
(c) des-axis current (d) ne
s-axis current. Fig. 15. Simulation results
(a) Before compensation, (b) After compensation. Fig. 16. FFT waveform of a-phase
VI. EXPERIMENTAL
In this paper, inverter set and IS-PMSM were made-up as Fig. 17 and 18 to verify the proposed compensation method.
Because voltage distortion at a low speed range is severer than that at a high speed range [21], the experimental tests have been performed at 100[rpm]. IS-PMSM's pole number is 48, so fundamental electrical frequency is 40Hz. The dead time is configured at 2[us], and turn-on/off delay time of the used switching devices in the inverter are 35[ns] and 2.0~2.9[ns], respectively.
24
Power Unit
Diode Rectifier DC_link
3φ 220V
Contrrol Unit
A/D
Independent Six-phase System Controller Board
Computer
DSP
FLEX10K100PWM pulse generator
M/Tprotectdecoder
TMS320VC33A/D AD7864
D/A DAC8420
Phase Conversion Signal
Gating Signal
C . T
Encoder
A
B
C
D
E
F
s N
E-phase
A-phaseB-phase
C-ph
ase
D-phase
6
Vdc
F-ph
ase
Fig. 17. Configuration of the system
As known from Fig. 19, phase current is the perfect sinusoidal waveform and maximum value of phase current is reduced after start of compensation. Fig. 21 shows the A-phase current harmonics spectrum by FFT. After compensation, (6n ± 3)th harmonics disappear. This means that the distorted current and voltage waveforms are completely compensated by using the proposed compensation algorithm.
Fig. 18. Configuration of the experimental system
VII. CONCLUSIONS
In this paper, vector control method based on a multiple d-q-n spaces concept for IS-PMSM (Independent Six-phase Permanent Magnet Synchronous Motor) and compensation algorithm for current distortion caused by dead-time and nonlinear characteristics of the switching devices were proposed. The proposed compensation algorithm uses the zero sequence component of d-q-n reference frame transformation as the input signal of the compensator.
This algorithm doesn’t require any additional hardware, the other information except magnitude of the phase current and position of rotor for reference frame transformation, complicated mathematical calculation and off-line experimental measurements. Moreover, this
1061
The 2010 International Power Electronics Conference
![Page 7: [IEEE 2010 International Power Electronics Conference (IPEC - Sapporo) - Sapporo, Japan (2010.06.21-2010.06.24)] The 2010 International Power Electronics Conference - ECCE ASIA - -](https://reader035.pdfslide.net/reader035/viewer/2022073110/575093151a28abbf6bacfdea/html5/thumbnails/7.jpg)
algorithm can be easily implemented, and applied to not only the steady state but also transient state.
All these are verified through the several simulation and experiments.
2
-2
0 [A ]
P h a se C u rre n t
1
-1
0 [A ]
D -a x is C u r re n t
2
0
1 [A ]
Q -a x is C u r re n t
0 .5
-0 .5
0 [A ]
0 [m s] 6 0 [m s]S ta r t o f C o m p e n sa tio n
N -a x is C u r re n t
a b c
(a )
(b )
(c )
(d )
(a) Phase currents (b) qes-axis current
(c) des -axis current (d) ne
s -axis current
Fig. 19. Experimental result
(a) Waveforms of ds-qs-ns axes currents (b) Lissajous circle and ds-qs-ns axes current (2-D) (c) Lissajous circle and ds-qs-ns axes current (3-D) (100 r/min)
Fig. 20. Waveforms of Lissajous circle after compensation
1
0
[A]
100Hz/Div
1
-0.5
[A]
1th
3th
1th
3th
(a)
(b)
(a) Before compensation (b) After compensation.
Fig. 21. FFT of a-phase current
REFERENCES
[1] E. Levi, “Editorial - Special Issue on Multi-Phase Motor Drives”, EPE Journal, Vol. 14, No. 3, June-July-August 2004, pp. 4.
[2] G. K. Singh, “Multi-Phase Induction Machine Drive Research a Survey”, Electric Power Systems Res, Vol. 62, 2002, pp.139-147.
[3] T. Gobalarathnam, H. A. Toliyat, and J. C. Moreira, “Multi-phase fault-tolerant brushless DC motor drives”, in Conf. Rec. IEEE Indust. Applicat. Conf., 2000, pp. 1683-1688.
[4] L. Parsa and H. M. Toliyat, “Multiphase permanent magnet motor drives”, in Proc. Industrial Application Soc. Annu. Meeting, Oct. 2003, pp. 401?408.
[5] T. Gopalarathnam, S. Waikar, H.A. Toliyat, M.S. Arefeen, J.C. Moreira, "Development of low cost multi-phase brushless permanent magnet (BPM) motors with unipolar current excitations", Proceedings of the IEEE-IAS 1999 Annual Meeting, Phoenix, AZ, Oct. 3-7, 1999, pp. 173-179.
[6] C. C. Chan, J. Z. Jiang, G. H. Chen, X. Y. Wang, and K. T. Chau, “A novel high power density permanent magnet motor drive for electric vehicles”, in Proc. EVSI 1, paper 8.06, 1992, pp. 1-12.
[7] F. Caricchi et al, “Innovative inverter topology for concentrated winding PM motor drives”, Proc. IEEE PESC’92, vol. 2, pp. 964-972, 1992.
[8] R. Gregor, F. Barrero, S. Toral, M.J. Duran, "Realization of an Asynchronous Six-Phase Induction Motor Drive Test-Rig", to be published in the Proceedings of the Intl. Conf. on Renewable Energies and Power Quality 2008 (ICREPQ'08), Santander, Spain, March 2008.
[9] R. Bojoi, F. Farina, A. Tenconi, and F. Profumo: “Analysis of the Asymmetrical Operation of Dual Three-Phase Induction Machines”, Conf. Rec. IEEE IEMDC, pp. 429-435, (2003).
[10] R. Bojoi, A. Tenconi, and F. Profumo: “Digital Synchronous Frame Current Regulation for Dual-Three Phase Induction Motor Drives”, Conf. Rec. IEEE PESC, pp. 1475-1480, (2003).
[11] T. M. Jahns, “Improved reliability in solid-state ac drives by means of multiple independent phase-drive units,” IEEE Trans. Ind. AppLicaf., vol. IA-16, no. 3, pp. 321-331, May/June 1980.
[12] Ryu, H.M., Kim, J.H., and Sul, S.K.: "Analysis of multiphase space vector pulse-width modulation based on multiple d-q spaces concept", IEEE Trans. Power Electron., 2005, 20, (6), pp. 1364–1371.
[13] Hyung-Min Ryu, Seung-Ki Sul, "Multiple d-q Spaces Concept for Multi-Phase AC Motor Drive", ICPE(ISPE), 2004, 10, pp. 670-674
[14] D.W Novotny and etc, "Vector control and Dynamics of AC Drives, Chapter 2," Oxford, 1996.
[15] I.Bolea and etc, "Electric Drives, Chapter 8," CRC Press, 1998.
[16] Khluabwannarat, P. Thammarat, C. Tadsuan, S. Bunjongjit, S, "An analysis of iron loss supplied by sinusoidal, square wave, bipolar PWM inverter and unipolar PWM inverter", in Power Engineering Conference, 2007. IPEC 2007. International, 2007, pp. 1185-1190.
[17] Tadsuan, S. Tangsiriworakul, C, "Design and Comparison of Iron Losses Mathematical Model with Single Phase and Three phase PWM Inverter Supply", Industrial Technology, 2008. ICIT 2008. IEEE International Conference on,21-24 April 2008, pp. 1-6.
[18] D.Holmes and etc, "Pulse Width Modulation for Power Converters: Principles and Practice, Chapter 4," Wiley-IEEE Press, 2003.
1062
The 2010 International Power Electronics Conference
![Page 8: [IEEE 2010 International Power Electronics Conference (IPEC - Sapporo) - Sapporo, Japan (2010.06.21-2010.06.24)] The 2010 International Power Electronics Conference - ECCE ASIA - -](https://reader035.pdfslide.net/reader035/viewer/2022073110/575093151a28abbf6bacfdea/html5/thumbnails/8.jpg)
[19] Takashi Sukegawa, Katsuhiro Mizuno, Takayuki Matsui, Toshiaki Okuyama,"Fully Digital, Vector Controlled PWM VSI-Fed ac Drives with an Inverter Dead-Time Compensation Strategy",IEEE Trans. on Industrial Applications. Vol.27, No.3, pp.552-559, 1991.
[20] J. -W. Choi and S.-K.Sul,“Inverter output voltage synthesis using novel dead time compensation", IEEE Trans. Power Electron.,vol.11, No.2, pp.221-227, Mar. 1996.[22]Inverter output voltage synthesis using novel dead time compensation
[21] Hyun-Soo Kim, Hyung-Tae Moon, Myung-Joong Youn,"On-Line Dead-Time Compensation Method Using Disturbance Observer", IEEE Trans. on Power Electronics, Vol.18, No.6, pp. 1336-1345, November 2003.
[22] Seon-Hwan Hwang, Jang-Mok Kim, "A Dead Time Compensation Method in Voltage-Fed PWM Inverter", Industry Applications Conference, Oct. 2006.
[23] Wei-Feng Zhang and Yue-Hui Yu, “Comparison of Three SVPWM Strategies”, Journal of Electrical Science and Technology of China, Vol. 5. No.3, September 2007. pp. 283 -287.
[24] J. Holz, “Pulsewidth Modulation-A Survey”, IEEE Transactions on Industrial Electronics, Vol.39, No.5, pp.410-420, December 1992
[25] H. W. Van der Broeck, and H. C. Skudelny, “Analysis and Realization of a Pulsewidth Modulator Based on Voltage Space Vectors”, IEEE Transactions on Industry Applications, Vol.24, pp.142-150, Jan /Feb 1988.
[26] D.W. Chung, J.S. Kim, and S.K. Sul, “Unified Voltage Modulation Technique for Real-Time Three-Phase Power Conversion,” IEEE Transactions on Industry Applications, Vol.34, No.2, pp.374-380, March /April 1997.
1063
The 2010 International Power Electronics Conference