Embed Size (px)
Citation preview
![Page 1: [IEEE 2014 IEEE Radar Conference (RadarCon) - Cincinnati, OH, USA (2014.5.19-2014.5.23)] 2014 IEEE Radar Conference - Diffraction tomography for ultra-wideband noise radar and imaging](https://reader030.pdfslide.net/reader030/viewer/2022022123/5750a1e91a28abcf0c972874/html5/page/1.jpg)
Diffraction Tomography for Ultra-Wideband Noise Radar and Imaging Quality Measure of a Cylindrical
Perfectly Conducting Object
Hee Jung Shin, Ram M. Narayanan Department of Electrical Engineering
The Pennsylvania State University University Park, PA 16802, USA
[email protected], [email protected]
Muralidhar Rangaswamy Air Force Research Laboratory/RYAP
Building 620, 2241 Avionics Circle WPAFB, OH 45433, USA
Abstract—The tomographic image of a single cylindrical PEC object is obtained using diffraction tomography theorem after multiple transmissions of independent and identically distributed (iid) UWB random noise waveforms. The final tomographic image of the cylinder is successfully achieved by averaging all obtained images from multiple transmissions. For each transmission, iid band-limited white Gaussian noise waveform over a frequency range from 8–10 GHz is transmitted. Several numerical simulations in spatial frequency domain are performed, and the tomographic images are generated based on the backward scattering data of each transmitted iid UWB noise waveform. Mean square error is calculated to measure the image quality of the reconstructed tomographic image as well.
I. INTRODUCTION
Imaging techniques have been used for a long time in many applications such as civil infrastructure assessment, homeland security, and medical diagnosis [1-3]. Tomography is a widely known imaging technology used extensively in the area of medical imaging and nondestructive industrial scanning [4]. The fundamental idea of tomography is to solve the inverse scattering problem governed by wave equations [5]. Advances in signal and imaging processing techniques for radar systems have progressed so that multi-dimensional representations of the target object can be obtained from electromagnetic (EM) scattering with various waveforms [6-7].
In this paper, we demonstrate the use of the random noise waveform, taking advantage of its low probability of intercept (LPI) characteristics, and successfully reconstruct the image of the target object using the diffraction tomography theorem. First, the shortcoming of a single transmission of a random noise waveform is disclosed by comparing two reconstructed images based on two iid noise waveform transmissions. In order to bypass this shortcoming, a successful image reconstruction method based on multiple transmissions of iid noise waveforms is proposed. Also, the mean square error (MSE) is calculated to evaluate the image quality of the
tomographic image of the target object for the proposed image reconstruction method.
II. BACKGROUND
A. White Gaussian Noise Waveform
One of the most important advantage of using a random noise waveform as the transmit signal is its LPI feature since the transmitted noise waveform is constantly varying and never repeats exactly [8]. Such a signal is a stochastic process with a flat spectral density over a wide frequency range and can be used for system measurements and experimental design work. In this paper, the random noise waveform is defined as one whose probability density function (PDF) can be modeled as a Gaussian distribution. Thus, the transmit waveform is considered to be white Gaussian noise (WGN). WGN can be generated simply by using resistors or noise diodes while maintaining relatively flat spectral density versus frequency response [9]. Hence, relatively simple hardware designs can be achieved for noise radars compared to the conventional radar systems using complicated signal modulation schemes.
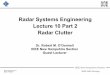
Fig. 1 and Fig. 2 show two independent and identically distributed (iid) random noise waveforms and their frequency responses. For both noise waveforms, 250 samples are drawn from a Gaussian distribution with a power level of +5 dBm across a 50 ohm load, and the pulse duration of both waveforms is approximately 1.2 ns. The frequency ranges shown in both figures are DC to 5 GHz only for comparison purposes. Both time and frequency domain of the first random noise waveform is shown in Fig. 1. The frequency spectrum is flat from DC to 3.5 GHz; however, a sudden decrease in intensity is observed at 4.25 GHz. Fig. 2 displays the second random noise waveform generated under the same conditions; however, the frequency spectrum is relatively flat for all frequency ranges from DC to 5 GHz compared to the first noise waveform shown in Fig. 1.
978-1-4799-2035-8/14/$31.00@2014 IEEE 0702
![Page 2: [IEEE 2014 IEEE Radar Conference (RadarCon) - Cincinnati, OH, USA (2014.5.19-2014.5.23)] 2014 IEEE Radar Conference - Diffraction tomography for ultra-wideband noise radar and imaging](https://reader030.pdfslide.net/reader030/viewer/2022022123/5750a1e91a28abcf0c972874/html5/page/2.jpg)
Figure 1. (a) The first random noise waveform generated with 250
amplitude samples at a power level of +5 dBm across a 50 ohm load. Pulse duration is approximately 1.2 ns. (b) The frequency spectrum of the time
domain WGN waveform shown in Fig. 1(a).
Figure 2. (a) The second random noise waveform generated with 250
amplitude samples at a power level of +5 dBm across a 50 ohm load. Pulse duration is approximately 1.2 ns. (b) The frequency spectrum of the time
domain WGN waveform shown in Fig. 2(a).
Ideal WGN has equal intensity at all frequencies within given frequency ranges. In reality, however, unexpected sudden intensity drop of a source signal shown in Fig. 1 should be avoided for ultra-wideband frequency applications. Such a frequency behavior of WGN waveform may not guarantee the successful reconstruction of the target image using a single transmission of WGN waveform for the desired frequency ranges.
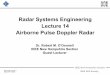
Since WGN is truly random, the signal cannot be modified or reshaped. In order to obtain flat frequency spectrum of WGN, multiple iid noise waveforms are required for averaging the spectral density in the desired frequency ranges. As shown in Fig. 3, the average calculations of the spectral density with a single WGN waveform, 5, 20 and 100 iid WGN waveforms are displayed, respectively. For each iid noise waveform, 250 samples are drawn from a Gaussian distribution at the same power level of +5 dBm across a 50 ohm load, and the pulse duration is approximately 1.2 ns.
Figure 3. (a) The spectral density average calculation with 1000 iid WGN waveforms at all frequency ranges from DC to 5GHz with (a) a single noise waveform, (b) 5 iid noise waveforms, (c) 20 iid noise waveforms, and (d)
100 iid noise waveforms. Each iid noise waveforms are generated with 250 amplitude random amplitudes at a power level of +5 dBm across a 50 ohm
load. Pulse duration is approximately 1.2 ns.
The spectral density of a single noise waveform shown in Fig. 3(a) is not flat at all frequencies within the ranges from DC to 5 GHz; notches are observed at 1.65 GHz, 2.8 GHz and 4.5 GHz. After averaging 100 iid noise waveforms shown in Fig. 3(d), however, the spectral density is relatively flat at all frequencies within any given frequency band. Therefore, the averaging process truly flattens the spectral density, thereby making it closer to the ideal WGN. Since each iid noise waveform is constantly varying and never repeats exactly, LPI is achieved as well.
B. The Fourier diffraction theorem
The goal of diffraction tomography is to reconstruct the properties of a slice of an object from the scattered field. For planar geometry, an object is illuminated with a plane wave, and the scattered fields are calculated or measured over a straight line parallel to the incident plane wave. In this paper, the Fourier diffraction theorem is applied to image the target object. The Fourier diffraction theorem is simply the Fourier transform of the measured scattered data with the Fourier transform of the object, and has been extensively applied in the area of acoustical imaging [10-12].
For two-dimensional geometry shown in Fig. 4, the object is denoted as ( , )o x y . When ( , )o x y is illuminated with a plane wave, the Fourier transform of the scattered field,
, ( )su , measured on line TT at l gives the values of the
two-dimensional transform, ( , )O u v , of the object along a semicircular arc in the frequency domain. Eventually, the object function, ( , )o x y , is recovered from the inverse Fourier transform. The mathematical formulation and proof of validity of the Fourier diffraction theorem are not shown here since they have already been developed in [13].
0 0.2 0.4 0.6 0.8 1-1
-0.5
0
0.5
1
Input Noise Waveform #1
Time (ns)
Am
plit
ud
e (
V/m
)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-100
-80
-60
-40
-20
0
Frequency (GHz)
Am
plit
ud
e (
dB)
0 0.2 0.4 0.6 0.8 1-1
-0.5
0
0.5
1
Input Noise Waveform #2
Time (ns)
Am
plitu
de
(V/m
)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-100
-80
-60
-40
-20
0
Frequency (GHz)
Am
plitu
de
(dB
)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-60
-40
-20
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-60
-40
-20
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-60
-40
-20
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-60
-40
-20
Frequency (GHz)
(a)
(b)
(a)
(b)
Am
plitu
de (
dB)
(a)
(b)
(c)
(d)
978-1-4799-2035-8/14/$31.00@2014 IEEE 0703
![Page 3: [IEEE 2014 IEEE Radar Conference (RadarCon) - Cincinnati, OH, USA (2014.5.19-2014.5.23)] 2014 IEEE Radar Conference - Diffraction tomography for ultra-wideband noise radar and imaging](https://reader030.pdfslide.net/reader030/viewer/2022022123/5750a1e91a28abcf0c972874/html5/page/3.jpg)
Figure 4. The Fourier diffraction theorem relates the Fourier transform of a
diffracted projection to the Fourier transform of the object along a semicircular arc. An arbitrary object is illuminated by a plane wave
propagating along the unit vector, and the coordinate system is rotated.
III. RESULTS
A. Formulation
Two-dimensional backward scattering geometry for a cylindrical conducting object is shown in Fig. 5, and the theoretical analysis of diffraction tomography of the given geometry using frequency diversity technique is presented. The microwave imaging research has already shown that the image reconstructed in the backward scattering case is better than that obtained in the forward scattering case based on numerical results [14].
Figure 5. Two-dimensional backward scattering geometry for a cylindrical
conducting object. Red dots and green circle represent a linear receiving array and PEC cylinder, respectively.
As shown in Fig. 5, a single PEC object is located at the center of the simulation scene. We assume that the cylindrical object is infinitely long along the z-axis, and the incident z-polarized plane wave is illuminated from −x direction. The receiver spacing, Δy, is calculated to avoid aliasing effect, and is given by
min
2y
(1)
where λmin is the minimum wavelength. A linear receiving array is located at x = −d from the center of the cylinder object, collecting scattered field for reconstruction of the object image. Similarly, the frequency stepping interval (Δf) condition requires that
max2
cf
r
(2)
where c is the speed of wave propagation in free space, and rmax is the maximum size of the scattering object.
The z–polarized incident plane wave is defined as
0
0
ˆ0
ˆ0
ˆ( )
1 1ˆ( )
jk x rinc
jk x rinc inc
E r z E e
H r E y E ej
(3)
where 0 /k c is the wavenumber, 0E is the field
amplitude, and 0/o is the intrinsic impedance in free
space. If the object consists of a material having a certain dielectric constant value, the equivalent electric current distribution, Jeq, is calculated for the scattered field. However, the object is defined as PEC so that the scattered field observed at the linear receiving array in the y-direction located at x = −d is calculated by applying the physical optics approximation and given by
0 0
0
( , , )
ˆ2 ( ) ( )
scat eq
S
i
S
E k x d y j J G r r dr
jk n r H r G r r dr
(4)
where S is the boundary of scatterer, ˆ( )n r
is the outward unit
normal vector to S, and G r r
is the Green’s function for
two-dimensional geometry. On assuming the polarization in the z-direction, the scattered field, scatu , obtained by the receivers at x = −d becomes
0
scat 0 0
ˆ 20 0
ˆ( , , ) ( , , )
( )
scat
jk x r
u k x d y z E k x d y
jk E O r e G r r d r
(5)
where
ˆ ˆ( ) 2 ( ) ( )O r n r x S r
(6)
is defined as the scattering function of the PEC object, which is related to the object shape, and ( )S r is the Dirac delta
function defined as
0 as
( )0 elsewhere
r SS r
. (7)
The one-dimensional Fourier transform of scatu , defined in (5), in the y-direction is written as
2
0 0scat 0 0( , , ) ( , )
2j d
y y
k EU k x d k e O k k
j
(8)
where
2 2
0 0
2 20 0
as
as
y y
y y
k k k k
j k k k k
. (9)
If xk is defined as
0xk k (10)
978-1-4799-2035-8/14/$31.00@2014 IEEE 0704
![Page 4: [IEEE 2014 IEEE Radar Conference (RadarCon) - Cincinnati, OH, USA (2014.5.19-2014.5.23)] 2014 IEEE Radar Conference - Diffraction tomography for ultra-wideband noise radar and imaging](https://reader030.pdfslide.net/reader030/viewer/2022022123/5750a1e91a28abcf0c972874/html5/page/4.jpg)
the Fourier transformed of two-dimensional object function, ( , )x yO k k , defined in (8), is given by
( )( , ) ( , ) x yj k x k y
x yO k k o x y e dxdy . (11)
In this case, the arguments of ( , )x yO k k are related by
2 2 20 0( )x yk k k k . (12)
Equations (8) and (12) show that as a two-dimensional scattering object is illuminated by a plane wave, one-dimensional Fourier transform of the scattered field yields a semicircle centered at 0(0, )k with radius 0k in the two-
dimensional Fourier space ( , )x yO k k [15].
B. Simulation Results of Diffraction Tomography of a Cylindrical PEC Object with a Single WGN Waveform
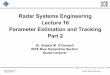
Two-dimensional backward scattering geometry shown in Fig. 5 is simulated with two iid band-limited WGN waveforms. Both iid WGN waveforms with 500 random amplitude samples drawn from the Gaussian distribution, shown in Fig. 6 and Fig. 7, are transmitted to reconstruct tomographic images of the cylindrical object.
As shown in Fig. 5, the cylindrical conducting object is assumed to be infinitely long along the z–axis, and is located 90 cm from the receiving array. The scattered field is uniformly sampled at receiving array Rx1 through Rx101 with frequency swept within X-band from 8–10 GHz in 41 steps. The locations of Rx1 and Rx101 are at (−90 cm, 75 cm) and (−90 cm, −75 cm), respectively, and the receiver spacing, Δy, is set to 1.5 cm based on (1) when fmax is 10 GHz. The maximum frequency stepping interval, Δf, is calculated as 1 GHz using (2) when the radius of the cylinder is 15 cm. In order to enhance the quality of tomographic image, the frequency stepping interval of backward scattering is set to 50 MHz.
Figure 6. (a) The first iid band-limited WGN waveform generated with 500
amplitude samples. Pulse duration is approximately 2.4 ns. (b) The frequency spectrum of the time domain WGN waveform shown in Fig. 6(a).
The frequency ranges are shown from DC to 12 GHz only.
Figure 7. (a) The second iid band-limited WGN waveform generated with
500 amplitude samples. Pulse duration is approximately 2.4 ns. (b) The frequency spectrum of the time domain WGN waveform shown in Fig. 7(a).
The frequency ranges are shown from DC to 12 GHz only.
A block diagram shown in Fig. 8 displays the tomographic image reconstruction method using diffraction tomography. The one-dimensional Fourier transformed scattered field data collected at the receiving array Rx1 through Rx 101 is Fourier transformed into two-dimensional object Fourier space data,
( , )x yO k k , by using (8). Such Fourier space data is two-
dimensional inverse Fourier transformed to obtain the final object function, ( , )o x y .
Figure 8. The image reconstruction method using diffraction tomography.
Fourier space data in three-dimensional axis and the final tomographic images of the single cylindrical conducting object using the first and second iid WGN waveforms are shown in Fig. 9 and Fig. 10, respectively.
Figure 9. (a) Fourier space data of the single cylindrical conducting object in three-dimensional axis, and (b) the tomographic image using the first
WGN noise waveform shown in Fig. 6.
0 0.5 1 1.5 2
-3
-2
-1
0
1
2
Input Noise Waveform #1 for Tomography (500 amplitude samples)
Time (ns)
Am
plit
ud
e (
V/m
)
0 2 4 6 8 10 12-100
-80
-60
-40
-20
0
Frequency (GHz)
Am
plit
ud
e (
dB
)
0 0.5 1 1.5 2
-2
-1
0
1
2
3Input Noise Waveform #2 for Tomography (500 amplitude samples)
Time (ns)
Am
plit
ud
e (
V/m
)
0 2 4 6 8 10 12-100
-80
-60
-40
-20
0
Frequency (GHz)
Am
plit
ud
e (
dB
)
Fourier transform of scattering
field
kx & kycalculation
Object function
2D inverse Fourier
transform
Target image
( , )x yO k k ( , )o x y
Scattering calculation in time domain
UWB WGN waveform
transmission
y (m
)
x (m)-0.6 -0.4 -0.2 0 0.2 0.4
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
(a)
(b)
(a)
(b)
(a) (b)
978-1-4799-2035-8/14/$31.00@2014 IEEE 0705
![Page 5: [IEEE 2014 IEEE Radar Conference (RadarCon) - Cincinnati, OH, USA (2014.5.19-2014.5.23)] 2014 IEEE Radar Conference - Diffraction tomography for ultra-wideband noise radar and imaging](https://reader030.pdfslide.net/reader030/viewer/2022022123/5750a1e91a28abcf0c972874/html5/page/5.jpg)
Figure 10. (a) Fourier space data of the single cylindrical conducting object in three-dimensional axis, and (b) the tomographic image using the second
WGN noise waveform shown in Fig. 7.
As shown in Fig. 10, the image does not form the object correctly compared to Fig. 9. The notch observed at 9.1 GHz in Fig. 7(b) changes the values of scattered field unexpectedly in this case, producing a smeared image shown at Fig. 10(b). Based on two iid WGN waveform simulations, we conclude that a single transmission of a noise waveform may or may not be sufficient to form a correct tomographic image of the object using the diffraction tomography algorithm.
C. Simulation Results of Diffraction Tomography of a Cylindrical PEC Object with Multiple iid WGN Waveforms
Fig. 11 shows the image reconstruction method for multiple transmissions of iid WGN waveforms using diffraction tomography. The proposed imaging method is to overlap the obtained tomographic image for each iid noise waveform so that the final tomographic image is generated based on summing and averaging process.
Figure 11. The image reconstruction method for n-th transmission of iid
WGN waveforms using diffraction tomography.
For the n-th transmitted waveform, 10 iid WGN waveforms are generated with 500 amplitude samples and transmitted for scattered field data and diffraction tomography simulations. Fig. 12 shows the tomographic images based on the method proposed in Fig. 11. Fig. 12 shows the final tomographic images when the single, 3, 7 and all 10 discrete images are averaged, respectively.
D. Image Quality Measure
As shown in Fig. 12(d), the tomographic image of the target is successfully reconstructed after averaging 10 transmissions of iid noise waveforms. In order to quantify the image quality of the tomographic image, we measure the deviations between the reference image and the reconstructed tomographic images based on iid noise waveform transmissions.
Figure 12. The final tomographic image of the target after averaging (a) a single image, (b) 3 images, (c) 7 images, and (d) all 10 images.
For the reference image reconstruction, the tomographic image reconstruction method shown in Fig. 8 is used on the two-dimensional backward scattering geometry shown in Fig. 5 with the input waveform of the first derivative Gaussian waveform having a pulse width of 0.15 ns. The first derivative Gaussian waveform is the most popular pulse shape in UWB communication systems because the DC component is removed [16-17]. Fig. 13 shows the Fourier space data in three-dimensional axis and the final tomographic images using the first derivative Gaussian waveforms, respectively.
Figure 13. (a) Fourier space data of the single cylindrical conducting object in three-dimensional axis, and (b) the tomographic image using the first
derivative Gaussian waveform.
Each pixel of the tomographic image represents the intensity of the scattered field due to the object, and the pixel difference-based measure is used to calculate mean square distortion of pixels [18]. The mean square error (MSE) is the cumulative squared error between the reference and noise waveform images. MSE is defined as
21 1
0 0
1MSE ( , ) ( , )
M N
y x
R x y S x yMN
(13)
y (m
)
x (m)-0.6 -0.4 -0.2 0 0.2 0.4
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Fourier transform of scattering
field
kx & kycalculation
Object function
2D inverse Fourier
transform
Target image
1( , )x yO k k 1( , )o x y
Scattering calculation in time domain
1st UWB WGN
waveform transmission
∑
Fourier transform of scattering
field
kx & kycalculation
Object function
2D inverse Fourier
transform
Target image
( , )n x yO k k ( , )no x y
Scattering calculation in time domain
n -th UWB WGN
waveform transmission
Final target image
( , )finalo x y
x (m)
y (m
)
-0.6 -0.4 -0.2 0 0.2 0.4
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
x (m)
y (m
)
-0.6 -0.4 -0.2 0 0.2 0.4
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
x (m)
y (m
)
-0.6 -0.4 -0.2 0 0.2 0.4
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
x (m)
y (m
)
-0.6 -0.4 -0.2 0 0.2 0.4
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
x (m)
y (m
)
-0.6 -0.4 -0.2 0 0.2 0.4
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
(a) (b) (a) (b)
(c) (d)
(a) (b)
978-1-4799-2035-8/14/$31.00@2014 IEEE 0706
![Page 6: [IEEE 2014 IEEE Radar Conference (RadarCon) - Cincinnati, OH, USA (2014.5.19-2014.5.23)] 2014 IEEE Radar Conference - Diffraction tomography for ultra-wideband noise radar and imaging](https://reader030.pdfslide.net/reader030/viewer/2022022123/5750a1e91a28abcf0c972874/html5/page/6.jpg)
where R(x,y) is the reference image, S(x,y) is the noise waveform image, M and N are the dimensions of the images.
MSE is calculated as each discrete image is added and averaged. As MSE decreases, the image quality of the averaged noise waveform images becomes better and clearer, getting closer to the reference image eventually. Fig. 14 shows the MSE plot with respect to the number of averaged noise waveform images.
Figure 14. MSE versus the number of averaged noise waveform images. Four red circles represent the MSE values for the four images shown in
Figure 12.
IV. CONCLUSION
We have reconstructed two-dimensional images of a stationary PEC cylindrical object using iid UWB WGN waveforms using the diffraction tomography algorithm. From the simulation results, we conclude that a single transmission of noise waveform may not sufficient to generate the tomographic image using diffraction tomography. However, image of the object is successfully reconstructed using diffraction tomography after averaging the images from the multiple transmissions of iid WGN waveforms. The study of mathematical relationship of averaging multiple images based on multiple iid WGN waveforms and the tomographic image quality measure are also shown by calculating MSE. The preliminary results discussed in this paper provide us a basis to implement an actual tomography imaging system with various material types of target objects.
ACKNOWLEDGMENT
This work was supported by the Air Force Office of Scientific Research (AFOSR) Contract # FA9550-12-1-0164. We appreciate useful comments received from Dr. Tristan Nguyen of AFOSR.
REFERENCES [1] Y.J. Kim, L. Jofre, F. De Flaviis, and M.Q. Feng, “Microwave
reflection tomographic array for damage detection of civil structures,” IEEE Transactions on Antennas and Propagation, vol. 51, no. 11, pp. 3022–3032, Nov. 2003.
[2] D. Zimdars and J.S. White, “Terahertz reflection imaging for package and personnel inspection,” Proc. SPIE Conf. on Terahertz for Military and Security Applications II, Orlando, FL, vol. 5411, pp. 78–83, Apr. 2004.
[3] X. Li, E.J. Bond, B.D. Van Veen, and S.C. Hagness, “An overview of ultra-wideband microwave imaging via space-time beamforming for early-stage breast-cancer detection,” IEEE Antennas and Propagation Magazine, vol. 47, no.1, pp. 19–34, Feb. 2005.
[4] H.D. Griffiths and C.J. Baker, “Fundamentals of tomography and radar,” in Advances in Sensing with Security Applications (Eds.: J. Byrnes and G. Ostheimer). Dodrecht, The Netherlands: Springer, 2006, pp. 171–187.
[5] A.C. Kak, “Computerized tomography with X-Ray, emission, and ultrasound sources,” Proceedings of the IEEE, vol. 67, no. 9, pp. 1245–1272, Sep. 1979.
[6] L. Huang, and Y. Lu, “Through-the-wall tomographic imaging using chirp signals,” Proc. 2011 IEEE International Symposium on Antennas and Propagation (AP-S/URSI), Spokane, WA, pp. 2091–2094, July 2011.
[7] H.J. Shin, R.M. Narayanan, and M. Rangaswamy, “Tomographic imaging with ultra-wideband noise radar using time-domain data,” Proc. SPIE Conf. on Radar Sensor Technology XVII, Baltimore, MD, vol. 8714, pp. 87140R-1–87140R-9, Apr. 2013.
[8] C.-P. Lai and R. M. Narayanan, “Ultrawideband random noise radar design for through-wall surveillance,” IEEE Transactions on Aerospace and Electronic Systems, vol. 46, no. 4, pp. 1716–1730, Oct. 2010.
[9] R. Vela, R.M. Narayanan, K.A. Gallagher, and M. Rangaswamy, “Noise radar tomography,” Proc. 2012 IEEE Radar Conference, Atlanta, GA, pp. 720–724, May 2012.
[10] S.K. Kenue and J.F. Greenleaf, “Limited angle multifrequency diffraction tomography,” IEEE Transactions on Sonics and Ultrasonics, vol. 29, no. 6, pp. 213–217, July 1982.
[11] B.A. Roberts and A.C. Kak, “Reflection mode diffraction tomography,” Ultrasonic Imaging, vol. 7, no. 3, pp. 300–320, July 1985.
[12] M. Soumekh, “Surface imaging via wave equation inversion,” Acoustical Imaging, vol. 16, pp. 383–393, 1988.
[13] S.X. Pan and A.C. Kak, “A computational study of reconstruction algorithms for diffraction tomography: Interpolation versus filtered backpropagation,” IEEE Transactions on Acoustics, Speech and Signal Processing, vol. 31, no. 5, pp. 1262–1275, Oct. 1983.
[14] T.-H. Chu and K.-Y. Lee, “Wide-band microwave diffraction tomography under Born approximation,” IEEE Transactions on Antennas and Propagation, vol. 37, no. 4, pp. 515–519, Apr. 1989.
[15] D.-B. Lin and T.-H. Chu, “Bistatic frequency-swept microwave imaging: Principle, methodology and experimental results,” IEEE Transactions on Microwave Theory and Techniques, vol. 41, no. 5, pp. 855–861, May 1993.
[16] J.W. Hu, T. Jiang, Z.G. Cui, and Y.L. Hou, “Design of UWB pulses based on Gaussian pulse,” Proc. 3rd IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Sanya, China, pp. 651–655, Jan. 2008.
[17] A.K. Thakre and A.I. Dhenge, “Selection of pulse for ultra wide band (UWB) communication system,” International Journal of Advanced Research in Computer and Communication Engineering, vol. 1, no. 9, pp. 683–686, Nov. 2012.
[18] I. Avcibaş, B. Sankur, and K. Sayood, “Statistical evaluation of image quality measures,” Journal of Electronic Imaging, vol. 11, no. 2, pp. 206–223, Apr. 2002.
1 2 3 4 5 6 7 8 9 104
5
6
7
8
9
10
11x 10
-3 Number of Images vs. MSE
Number of Images
MS
E
978-1-4799-2035-8/14/$31.00@2014 IEEE 0707