Embed Size (px)
Citation preview
![Page 1: [IEEE ICC 2014 - 2014 IEEE International Conference on Communications - Sydney, Australia (2014.6.10-2014.6.14)] 2014 IEEE International Conference on Communications (ICC) - BWS: Beacon-driven](https://reader043.pdfslide.net/reader043/viewer/2022030116/5750a1bd1a28abcf0c95db29/html5/page/1.jpg)
BWS: Beacon-driven Wake-up Scheme for TrainLocalization using Wireless Sensor Networks
Adeel Javed, Haibo Zhang, and Zhiyi Huang
Department of Computer Science
University of Otago, New Zealand
Email: {adeel, haibo, zhuang}@cs.otago.ac.nz
Jeremiah D. Deng
Department of Information Science
University of Otago, New Zealand
Email: [email protected]
Abstract—Real-time train localization using wireless sensornetworks (WSNs) offers huge benefits in terms of cost reductionand safety enhancement in railway environments. A challengingproblem in WSN-based train localization is how to guaranteetimely communication between the anchor sensors deployedalong the track and the gateway deployed on the train withminimum energy consumption. This paper presents an energy-efficient scheme for timely communication between the gatewayand the anchor sensors, in which each anchor sensor runs anasynchronous duty-cycling protocol to conserve energy and wakesup only when it goes into the communication range of the gateway.A beacon-driven wake-up scheme is designed, and we establishthe upper bound on the amount of time that an anchor sensorcan sleep in one duty cycle to guarantee timely wake-up once atrain approaches. We also give a thorough theoretical analysis forthe energy efficiency of our scheme and give the optimal amountof time that an anchor sensor should sleep in terms of minimizingthe total energy consumption at each anchor sensor. We evaluatethe performance of our scheme through simulations, and resultsshow that our scheme can wake up anchor sensors timely at avery low cost on energy consumption.
I. INTRODUCTION
The world’s railway infrastructure has been experiencingsubstantial growth in the last two decades. This growth im-poses much greater pressure on railway operators due to theneed to guarantee the safety of railway transportation. Real-time train localization plays an important role in achievinghigh-level railway safety and reliability, since it can assist thesignalling system to initiate traffic signals, activate crossinggates, send alarms to trackside workers, and so on. Eventhough many GPS-based approaches have been designed anddeployed for localization and tracking applications, drawbackssuch as limited coverage and sophisticated infrastructures haveprevented them from being used for train localization. Forexample, trains in subway systems primarily operate under-ground. Even in the above-ground railway transportation, trainsmay frequently pass GPS dark territories such as tunnels andhilly regions [1]. Other technologies like WLAN, RFIDs andbluetooth also have certain limitations for train localization dueto either high cost of infrastructure installation and complicatedprotocol stack, or limited transmission range and lack ofcollision avoidance with limited computational capabilities.
Wireless sensor networking (WSN) is a promising technol-ogy for real-time train localization due to its huge benefits suchas low cost, large coverage, and easy deployment/maintenance.Anchor sensors with hardcoded global coordinates can bedeployed along the tracks to detect train movement. Whenthe train is approaching, the anchor sensors can report their
locations to the gateway installed on the train. Based on thelocations of the anchor sensors as well as the Received SignalStrength (RSS) of transmissions from anchor sensors to thegateway, some localization schemes such as particle filter [2]can be used to estimate the train location in a real-time manner.
It is worth noting that several factors may influence thevalue of the RSS received by the gateway, e.g., presence ofobstacles, interference, and noise. Since particle filter uses RSSvalues and the location information of the anchor sensors, themore information provided by the anchor sensors, the higherthe localization accuracy the particle filter will achieve. Thiswork focuses on ensuring timely communications betweenanchor sensors and the gateway sensor with maximum energysaving, which is crucial to the particle-filter-based train lo-calization. At any time period, each anchor sensor within thecommunication range of the gateway stays in active state andreports to the gateway promptly as the train can move veryfast. A straightforward approach is to let all sensors turn theirradio transceivers on and work in the idle listening state todetect train arrivals. However, sensor devices are commonlypowered by batteries, and this approach can quickly deplete thebattery energy at each anchor sensor as idle listening consumesalmost the same amount of energy as data transmission. Eventhough extensive work has been done on investigating energyharvesting techniques by using external energy sources such assolar or vibration energy [3], [4], [5], current solutions sufferfrom uncertainties and variations in the harvesting rate dueto its dependence on various environmental factors. Providingpower via the AC power lines is also inefficient as it will bevery expensive to deploy and maintain the infrastructure of ACpower lines.
Duty-cycling is commonly used in WSNs to save energy byperiodically turning radio off. A major challenge in applyingduty-cycling for train localization is to guarantee that eachanchor sensor can wake up in time once it goes into the com-munication range of the gateway. Even though many sensorwake-up schemes have been proposed, they are not suitablefor real-time train localization due to the special features ofrailway environments. In this paper we focus on designingan efficient wake-up scheme which can guarantee that eachanchor sensor can wake up timely for communication with thegateway using the minimum energy. The main contributions ofthis work are summarized as follows:
• We propose a beacon-driven anchor sensor wake-upmodel in which the gateway on the train continuallybroadcasts beacon packets to wake up anchor sensorsthat are going to communicate with the train. We
IEEE ICC 2014 - Ad-hoc and Sensor Networking Symposium
978-1-4799-2003-7/14/$31.00 ©2014 IEEE 276
![Page 2: [IEEE ICC 2014 - 2014 IEEE International Conference on Communications - Sydney, Australia (2014.6.10-2014.6.14)] 2014 IEEE International Conference on Communications (ICC) - BWS: Beacon-driven](https://reader043.pdfslide.net/reader043/viewer/2022030116/5750a1bd1a28abcf0c95db29/html5/page/2.jpg)
derive an upper bound on the amount of sleep timein one duty-cycle, and design a beacon-driven anchorsensor wake-up protocol.
• We analyze the energy efficiency of our scheme, andgave the optimal setting for the amount of sleep timein one duty-cycle in terms of minimizing the totalenergy consumption at each anchor sensor node.
• We evaluate the performance of our scheme throughsimulations. Simulation results demonstrate that ourscheme can timely wake up anchor sensors at a verylow cost on energy consumption.
The rest of the paper is organized as follows. Section IIdiscusses the related work. Section III describes the systemmodel and our research problems. Section IV gives the detailsof the wake-up scheme for train localization. Section V ana-lyzes the energy efficiency of our scheme. Section VI presentsthe simulation results. Finally, Section VII concludes the paperand sheds some lights on future work.
II. RELATED WORK
Existing wake up schemes can be divided into two classes:synchronous wake-up and asynchronous wake-up. In syn-chronous wake-up protocols, sensor nodes periodically wakeup at the same time to communicate with one another [6],[7]. Since all the participating nodes have to synchronizetheir clocks, synchronous duty-cycling is most appropriate forsingle-hop networks in which all the nodes can hear eachanother. The tracking scheme proposed in [8] is based on acombinatorics approach that sets delay bound at maximumtarget speed and it ignores the need of timely tracking ofobjects under minimized energy consumption. However, real-time train localization is not delay tolerant due to the fast trainspeed. Also it is often difficult to predict at what time a trainwill pass by which anchor sensor, and thus it is impossiblefor synchronous duty-cycling protocols to use a static globalschedule for all nodes to wake up or sleep. Moreover, it isnontrivial to synchronize the clocks of a large amount of sensornodes [9].
In asynchronous duty-cycling protocols, sensor nodes arenot required to synchronize their clocks with each other andsensor nodes can wake up independently. Since there are fewercommunications among sensor nodes, asynchronous protocolsare more energy efficient than synchronous protocols. Existingwork on asynchronous wake-up schemes [10], [6] mainlyfocuses on the tradeoff between energy efficiency (i.e. networklifetime) and transmission latency. While our objective is toguarantee timely sensor wake up with the minimum energyconsumption. Hence communication latency will affect theaccuracy and reliability of localization and is not tolerable.
Other related works include a variety of MAC protocolsdesigned based on asynchronous duty-cycling [11], [12], [13],[14]. Asynchronous duty-cycling provides a periodic channelsampling mechanism to detect potential transmissions. In orderto start transmission, a sensor node transmits a long preamblepacket to make it detectable by the neighbor nodes while eachneighbor node performs CCA checks. A neighbor sensor nodereceives the preamble packet and prepares to receive data.Asynchronous duty-cycling protocols such as B-MAC [11], X-MAC [12] and Wise-Mac [13] deal with preamble packets in
a way that the transmitter takes the responsibility to activatethe receiver for data transmission. RI-MAC [14] eliminatesthe overhead of the preamble packet by letting the receiversinitiate transmissions. However, these protocols are designedfor general purpose and not suitable for train localization.
III. SYSTEM MODELS AND PROBLEM STATEMENT
A. Network Model
TSc TSb
RbRb
Rc Rc
da
ai-1 ai ai+1 aj-1a.. aj+1aj aj+2ai-2a0. . . an. . .
Fig. 1: A WSN network model for train localization
The network consists of two types of sensor nodes: anchorsensors and gateway sensors, as shown in Figure 1. A set ofanchor sensors {a0, a1, ..., an} are uniformly deployed alonga straight track with equal distance da between any twoconsecutive anchor nodes. Each anchor sensor is equippedwith a single radio transceiver with a transmission rangeof Rc. We assume that each anchor sensor is hard-codedwith its geographic coordinates before deployment. A singlegateway sensor is installed on the train. The gateway sensor isequipped with two radio transceivers: TSc and TSb. TSc isused to communicate with the anchor sensors that fall into itstransmission range, and TSb is used to continually broadcastbeacon packets to activate the anchor sensors before they gointo the transmission range of TSc. The transmission range forTSc and TSb is Rc and Rb, respectively. We assume that Rb
is larger than Rc. To avoid interference TSc and TSb operateon two non-overlapping channels chc and chb respectively.Each anchor sensor operates on both channels, that is, useschb during duty-cycling and switches to chc to communicatewith TSc. As shown in Figure 1, zone 1 is the region coveredby TSc, and zone 1, zone 2 and zone 3 are the region coveredby TSb.
The train localization scheme works as follows: as thetrain moves, TSb continually broadcasts beacon packets. Eachbeacon packet contains information of the current train locationand speed. Once an anchor sensor receives a beacon packet,it stops duty-cycling and switches to channel chc to preparefor communication with TSc. When an anchor sensor goesinto the transmission range of TSc, it sends its geographiccoordinates to the gateway sensor. After an anchor sensor fin-ishes the communication with the gateway sensor, it switchesback to channel chb and resumes duty-cycling. Based on thegeographic coordinates received from anchor sensors as wellas the RSS information of the transmissions, the train locationwill be computed at the gateway in a real-time manner.
B. Asynchronous Duty-Cycling Model
Each anchor switches between sleep and wake-up statesindependently without global synchronization. Figure 2 showsone duty cycle, in which an anchor sensor first sleeps fortsleep second with its radio turned off, and then wakes up
IEEE ICC 2014 - Ad-hoc and Sensor Networking Symposium
277
![Page 3: [IEEE ICC 2014 - 2014 IEEE International Conference on Communications - Sydney, Australia (2014.6.10-2014.6.14)] 2014 IEEE International Conference on Communications (ICC) - BWS: Beacon-driven](https://reader043.pdfslide.net/reader043/viewer/2022030116/5750a1bd1a28abcf0c95db29/html5/page/3.jpg)
and turns its radio on to perform clear channel assessment(CCA) to detect incoming signals. If an incoming signal isdetected, the anchor sensor will stay active until the scheduledcommunication between the anchor sensor and the gatewaysensor is completed; otherwise it switches back to sleep stateand repeats another duty-cycle. The length of one duty-cycleis represented by Td, and the time for turning on/off radio andperforming CCA is denoted by tsw and tcca, respectively.
tsw tsw
Fig. 2: One duty-cycle
C. Problem Statement
We assume that each anchor sensor must be in the wake-up state before it goes into Zone 1, even though it is possiblefor an anchor to communicate with the gateway with a wake-up after entering Zone 1. We make this assumption so tosimplify the transmission scheduling of the anchors in Zone1 and to reduce complications caused by data collisions. Theduty-cycling parameter tsleep plays an important role in termsof timely waking up anchor sensors. If tsleep is too small,each anchor sensor needs to frequently turn on and turn off itsradio, thereby wasting energy. From energy saving perspective,the larger the tsleep, the more energy each anchor sensor canconserve. However, if tsleep is too large, an anchor sensor maymiss the chance to detect the beacon packet broadcast by TSb
and fail to wake up in time. The first issue we will addressin this paper is to derive the upper bound on tsleep, whichenables that each anchor sensor can stay asleep as long aspossible but still guarantees that each anchor sensor can wakeup in time. The second issue is to design an energy-efficientwake-up scheme, which guarantees that each anchor sensorcan wake up in time once it goes into Zone 1.
IV. BWS: BEACON-DRIVEN WAKE-UP SCHEME
A. Upper Bound on tsleep
As shown in Figure 3, suppose that anchor sensor ai entersinto the transmission range of TSb at time tb, and enters intothe transmission range of TSc at time tc. Since anchor ai mustbe active at time tc to communicate with TSc, it must wakeup during the period tc − tb. To wake up, anchor ai shouldreceive at least one beacon from TSb. Therefore, the followingconstraint on tsleep has to be satisfied:
tsleep � tc − tb. (1)
Let D denote the distance travelled by the train duringthe period of tc − tb, and dT represent the vertical distancefrom the gateway (train) to the line along which the anchorsensors are deployed. The size of Zone 2, denoted by Dz2, is√
R2b − d2T −√
R2c − d2T.
As dT is very small as compared with Rb and Rc, it canbe ignored and Dz2 can be calculated as
Dz2 = Rb −Rc. (2)
Gateway Gateway
ai-j ai-j+1 ai-j+2 . . . ai-1ai-2 ai+1ai ai+2
tb tc
ai-j+3
D
ai+k ai+k+1
Zone 1 Zone 2
ai-3 . . .
Fig. 3: Illustration of the derivation of the upper bound
Let Smax represent the maximum train speed, at which thedistance travelled by the train in the period tc − tb is D =Smax(tc− tb). To guarantee that anchor ai must perform CCAat least once in the period tc − tb regardless the actual trainspeed, the following condition must be satisfied:
Dz2 � Smax(tc − tb). (3)
Based on Equations (1), (2) and (3), we have
tsleep � tc − tb �Dz2
Smax=
Rb −Rc
Smax. (4)
B. Design of BWS Protocol
The key idea behind the BWS protocol is to wake upanchor sensor by detecting the beacon packets broadcast by thegateway. Specifically, the TSb radio continuously broadcastsbeacon messages that contain the following information: (a)the gateway ID (GW_ID), (b) the current train speed (ST ),and (c) the current train location (LocT ). Once an anchorsensor receives a beacon packet from the gateway, it performsthe following three tasks: Duty-cycling Pause, communicationwith TSc and Duty-cycling resumption. The pseudocode forthe wake-up protocol is given in Algorithm 1.
1) Duty-cycling Pause: Upon receiving of a packet, theanchor sensor first checks if the packet is a beacon packetbroadcast by gateway (line 2 in Algorithm 1). As the receivedbeacon packet contains the current train location, the anchorsensor can check in which zone it is located. If the anchorsensor is located in zone 2, it should first pause the runningthe duty-cycling protocol, stays active and then switches tochannel from chb to chc (lines 3 and 4).
2) Communication with TSc: When an anchor sensor aireceives a beacon packet, it wakes up to prepare for com-munication with TSc. The amount of time since ai wakesup till it first goes into Zone 1 can be estimated by α =√
(xai−xT )2+(yai
−yT )2−Rc
ST, where (xai
, yai) and (xT , yT ) are
the coordinates of ai and the train respectively. Once aireceives a beacon packet, it will initialized a timer, denoted bystart_timer with value of α (line 7 in Algorithm 1). Whenstart_timer expires, ai will report its location to the gatewayafter getting medium clear by CSMA control layer (line 12& 17). Once the gateway receives the packet from ai, it willsend back an acknowledgement. If ai does not receive theacknowledgment, it will retransmit the packet after a shortwhile (line 19 in Algorithm 1).
3) Duty-cycling resumption: Once an anchor node ai goesout of the transmission range of TSc (i.e., Zone 1 in Figure1), it should resume the duty-cycling protocol. To achieve this,each anchor node maintains another timer called stop_timer
IEEE ICC 2014 - Ad-hoc and Sensor Networking Symposium
278
![Page 4: [IEEE ICC 2014 - 2014 IEEE International Conference on Communications - Sydney, Australia (2014.6.10-2014.6.14)] 2014 IEEE International Conference on Communications (ICC) - BWS: Beacon-driven](https://reader043.pdfslide.net/reader043/viewer/2022030116/5750a1bd1a28abcf0c95db29/html5/page/4.jpg)
(line 8). Once stop_timer is expired, the node should resumeduty-cycling. The stop_timer is initialized with value β whichis the amount of time elapsed since the node wakes up till thetime it goes out of Zone 1, and β can be estimated using the
train speed, that is, β =
√(xai
−xT )2+(yai−yT )2+Rc
ST.
Algorithm 1: Beacon-driven Wake up at Anchor ai1 On receiving beacon packet:2 if SourceID = GW_ID then3 if ai locates in Zone 2 then
/* Pause duty-cycling */4 duty_cycling = False5 Channel = chc /* channel switch */6
7 start_timer (
√(xai
−xT )2+(yai−yT )2−Rc
ST)
8 stop_timer (
√(xai
−xT )2+(yai−yT )2+Rc
ST)
9 else10 Ignore Beacon11 duty_cycling = True
12 else13 Ignore Beacon
/* Resume duty-cycling */14 duty_cycling = True
15 On start_timer expiry:16 if start_timer is expired then
/* Communicate with TSc */17 Send_Packet(xai , yai )18 Repeat process at line 17, until ack is received19
20 On stop_timer expiry:21 if stop_timer is expired then22 Stop Sending Packets to Gateway23 Channel = chb /* channel switch */24
/* Resume duty-cycling */25 duty_cycling = True
It is possible for an anchor sensor to get beacon packetswhen it is located in Zone 3 due to large omnidirectionaltransmission range of TSb. BWS adaptively avoids unneces-sary wake-ups, as it uses the gateway’s location informationreceived in the beacon packet to calculate its zone. If an anchorsensor lies in Zone 3, BWS ignores such beacon packetsand allows an anchor sensor to continue with following duty-cycles. Although train location LocT may not be always ac-curate at a particular point of time, the associated localizationerror is acceptable by an anchor sensor to calculate its zone.However, for correct decision making for wake-up, we assumethat localization error due to time drift between anchor sensorsand the train will never be larger than distance da.
V. ANALYSIS OF ENERGY CONSUMPTION
In our system, the energy consumed at each anchor sensorcan be divided into two parts: energy consumed in duty-cyclingand energy consumed in the wake-up state. Table I givesthe list of states in which an anchor sensor operates and thecorresponding power level for each state.
A. Energy consumed during wake up
If an anchor sensor goes to sleep at the point when it justgoes into Zone 2, the amount of time that the anchor will sleep
TABLE I: States of an anchor sensor and respective power levelsStates Power Level Energy Consumed
Transmission Ptx Etx = ttxPtx
Idle Listening Pl El = tlPl
Packet Reception Prx Erx = trxPrx
Switch radios b/w ON & OFF Psw Esw = 2ttswPsw
CCA Pcca Ecca = tccaPcca
Sleeping Psleep Esleep = tsleepPsleep
throughout Zone 2 is tsleep. However, if the anchor sensorwakes up at the point when it just goes into Zone 2, it willreceive a beacon packet and stay active, and the amount ofsleeping time throughout Zone 2 is 0. Since duty-cycling is notsynchronized among all anchor sensors, an anchor sensor maywake up at any time between the above two extremes when itis in Zone 2. The amount of time that an anchor sensor sleepsin Zone 2 follows a uniform random distribution between 0and tsleep. Hence the average amount of time that an anchorsensor stays in the sleep state throughout Zone 2 is tsleep/2.The average amount of time that an anchor sensor stays inZone 2 is Rb−Rc
Savgwhere Savg is the average train speed.
Let Tz2 denote the average amount of time that an anchorsensor stays active when it is in Zone 2 for one train pass.Then Tz2 = Rb−Rc
Savg− tsleep
2 . Let Tz1 denote the average time
that an anchor sensor stays in Zone 1 for one train pass. ThenTz1 = 2Rc
Savg..
Let Twk denote the average time that an anchor sensor staysin the active state for one train pass. Since each anchor sensorwill resume duty-cycling at point when it enters into Zone 3,
Twk = Tz1 + Tz2
=Rb +Rc
Savg− tsleep
2.
(5)
To simplify our analysis we assume reliable communicationbetween anchor sensors and the gateway. So each anchorsensor will receive one beacon packet, send one report packetand receive one ACK packet. Let ttx and trx denote thetime for transmitting and receiving a packet respectively.Therefore, the amount of time that an anchor sensor stays inthe idle-listening state for one train pass, represented by tl, istl = Twk − ttx − 2trx.
Let Ewk denote the amount of energy consumed at ananchor sensor during wake-up for one train pass. Accordingto Table I,
Ewk = ttxPtx + 2trxPrx + tlPl (6)
= ttxPtx + 2trxPrx + (Twk − ttx − 2trx)Pl.
B. Energy consumed during duty-cycling
As shown in Figure 2, one duty cycle includes three parts:sleep (tsleep), CCA(tcca) and state switch (2tsw). Let Edc
denote the energy consumption for one duty-cycle. Then fromTable I we have,
Edc = 2tswPsw + tccaPcca + tsleepPsleep. (7)
The time required for switching radio between on and offstates and the time for CCA check are constants, thereforethe amount of energy consumed by state switching and CCAcheck is fixed for one duty cycle. For simplicity, we use ex todenote this amount of energy, that is,
ex = 2tswPsw + tccaPcca. (8)
IEEE ICC 2014 - Ad-hoc and Sensor Networking Symposium
279
![Page 5: [IEEE ICC 2014 - 2014 IEEE International Conference on Communications - Sydney, Australia (2014.6.10-2014.6.14)] 2014 IEEE International Conference on Communications (ICC) - BWS: Beacon-driven](https://reader043.pdfslide.net/reader043/viewer/2022030116/5750a1bd1a28abcf0c95db29/html5/page/5.jpg)
Then,Edc = ex + tsleepPsleep. (9)
C. Total energy consumption for a period
Let L be the total length of the time that the anchor sensorsoperate, and Td be the length of one duty cycle. We use λ todenote the total number of times that a train passes by ananchor sensor. Then the total energy consumed during duty-cycling for the whole period L is
Etotaldc =
L− λTwk
TdEdc, (10)
where L−λTwk
Tdis the total number of duty cycles in time period
L. The total energy consumed during wake-up for the wholeperiod L is
Etotalwk = λEwk., (11)
Let EtotalL represent the total energy consumed by an anchor
sensor in time period L. Then,
EtotalL = Etotal
dc + Etotalwk . (12)
Based on Equations (10) and (11), Equation (12) can beexpressed as,
ELtotal =
L− λTwk
TdEdc + λEwk. (13)
By substituting Equations (5), (6) and (9) in Equation (13),we have,
EtotalL =
1
2tsw + tcca + tsleep
(L− λ
(Rb +Rc
Savg− tsleep
2
))
(ex + tsleepPsleep) + λ(ttxPtx + 2trxPrx
+((Rb +Rc
Savg− tsleep
2
)− ttx − 2trx
)Pl
)(14)
D. Optimal tsleep for minimizing energy consumption
The minimization of energy consumed at each anchorsensor node can be formulated as the following optimizationproblem,
minimize ELtotal
subject to 0 < tsleep � tubsleep(15)
where tubsleep is the upper bound for tsleep which is given inSection III.A. As can be seen from Equation (14), the onlyvariable is tsleep, and it can be proved that EL
total is strictlydecreasing with the increase of tsleep. The optimal tsleep interms of minimizing the total energy consumption at eachanchor sensor is therefore tubsleep = Rb−Rc
Smax.
VI. SIMULATION RESULTS
A. Simulation Setup
We implement our scheme in TinyOS and run the sim-ulations in the COOJA simulator [15]. In our simulationsthe train speed gradually increases starting from 5m/s withacceleration varying between −1 m/s2 and 1 m/s2, and weuse the mobility plugin in COOJA to simulate the movement
of the train. Packet losses and retransmissions are simulatedby using the CSMA layer of CC2420 layer stack providedby TinyOS. The detailed configurations for the simulationsparameters are given in Table II.
TABLE II: Simulation ParametersParameters Values Parameters Values
Simulation time period L 1000s Rb ∼ 310m
Train trip frequency λ 1 Rc ∼ 150m
No. of Anchor Sensors 800 dT 2m
Simulation iterations 1000 Maximum train speed (Smax) 10m/s
tubsleep 16s Minimum train speed 5m/s
B. Number of Active Anchor Sensors in Zone 1
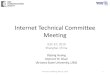
Since the size of Zone 1 is 300m and the distance betweentwo adjacent anchor sensors is 100m, the number of anchorsensors that fall into Zone 1 can vary from 3 to 4. Figure4 shows the number active anchor sensors in Zone 1 withdifferent settings of tsleep. According to Equation (4), themaximum tsleep that can guarantee timely wake-up of anchorsensors is 16 seconds. It can be seen that, for all cases wheretsleep is not larger than 16s, the number of active anchorsensors that are active in Zone 1 fluctuates between 3 and 4.For the case where tsleep = 32s, the number of active anchorsensors in Zone 1 varies from 0 to 4, and in most time thereare only 1 or 2 active anchor sensors. This is because the valueof tsleep (i.e., 32s) exceeds the upper bound tubsleep.
100 200 300 400 500 600 700 800 9000
0.5
1
1.5
2
2.5
3
3.5
4
Ave
rage
Num
ber
of A
ctiv
e A
ncho
r S
enso
rs in
Zon
e−1
Simulation Time (s)
tsleep=0s
tsleep=4s
tsleep=8s
tsleep=16s
tsleep=32s
Fig. 4: Number of active anchor sensors in Zone 1 at differenttsleep.
Since the size of Zone 1 is 300m, the anchor sensorsare deployed with minimum density of 1 sensor/100m (i.e.,4 sensors in Zone 1) to maximum 8 sensors/100m (24 sensorsin Zone 1), the maximum number of anchor sensors withinZone 1 vary between total number of deployed anchor sensorsin Zone 1 and one less than that (i.e., σ = 24, theoreticallymaximum anchor sensors in Zone 1 vary between 23 and 24).Even when all the anchor sensors adopt tubsleep, the averagenumber of active anchor sensors can be increased by denselydeploying the anchor sensors along the track. Figure 5 showsthat, for all the cases average number of active anchor sensorsare increased as the deployment density (σ) is increasedand the simulation results are very close to the theoreticalcounterparts.
However, if tsleep is increased to a larger value (e.g. 32s)than tubsleep, though the average number of active anchor sensorsin Zone 1 increases along the increase in deployment density,the average number of active anchor sensors decreases ascompared to tsleep = 16, as shown in Figure 5.
IEEE ICC 2014 - Ad-hoc and Sensor Networking Symposium
280
![Page 6: [IEEE ICC 2014 - 2014 IEEE International Conference on Communications - Sydney, Australia (2014.6.10-2014.6.14)] 2014 IEEE International Conference on Communications (ICC) - BWS: Beacon-driven](https://reader043.pdfslide.net/reader043/viewer/2022030116/5750a1bd1a28abcf0c95db29/html5/page/6.jpg)
Fig. 5: Number of active anchor sensors in Zone 1 at differentdeployment densities and tsleep = 16s.
C. Energy Consumption
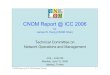
Figure 6 shows the average energy consumption at eachanchor sensor in simulation compared with their theoreticalcounterparts. All calculations are based on the current andvoltage specifications of CC2420 radio chipset datasheet. It
Fig. 6: Energy consumed by an anchor sensor at different tsleepvalues. Hatched bars are theoretical results, while clear bars are
simulation results.can be seen that keeping anchor sensors always active withoutduty-cycling consumes a huge amount of energy. With theincrease of tsleep, the total energy consumption drops signifi-cantly because the energy consumed in the active state drops.The amount of energy consumed by duty-cycling slightlyincreases since the amount of time that each anchor staysin the sleep mode increases. Figure 6 also shows that theenergy consumption obtained in simulations is close to theresults computed based on our theoretical analysis. Note dueto more realistic settings in the simulation (such as speedchanges, packet loss and retransmission), more energy isconsumed than in theory, whereas in theoretical analysis wehave assumed reliable transmission, omitting potential packetlosses and retransmission costs. However, it is obvious thatboth the theoretical and simulation results agree with eachother, pointing to the same optimal sleep time (16s).
VII. CONCLUSIONS
This paper investigates the problem of designing an energyefficient communication protocol for real-time train localiza-tion using wireless sensor networks. In our scheme each anchor
sensor runs an asynchronous duty-cycling protocol to conserveenergy and wakes up only when it goes into the communicationrange of the gateway on the train. A beacon-driven wake-up scheme is designed, and the upper bound on the anchorsensor sleep time within one duty cycle is derived in orderto guarantee timely wake-up. Furthermore, we theoreticallyanalyzed our scheme on energy efficiency and evaluated itsperformance through simulations.
For future work, evaluation of localization accuracy ofthe proposed scheme will be evaluated. This includes furtherimproving our beacon-driven scheme, conducting extensivesimulation, and comparing with other possible schemes.
REFERENCES
[1] A. Acharyaa, S. Sadhu, and T. Ghoshala, “Train localization and partingdetection using data fusion,” Transportation Research Part C: EmergingTechnologies, vol. 19, pp. 75–84, 2011.
[2] J. V. N. Vijayakumar, H. Zhang, Z. Huang, and A. Javed, “A particlefilter based train localization scheme using wireless sensor networks,”in proceeding of the 11th IEEE International Conference on EmbeddedComputing(EmbeddedCom), 2030, pp. 1–6.
[3] R. Vullers, R. van Schaijk, I. Doms, C. Van Hoof, and R. Mertens,“Micropower energy harvesting,” Solid-State Electronics, vol. 53, no. 7,pp. 684–693, 2009.
[4] S. Sudevalayam and P. Kulkarni, “Energy harvesting sensor nodes:Survey and implications,” Communications Surveys & Tutorials, IEEE,vol. 13, no. 3, pp. 443–461, 2011.
[5] A. Cammarano, D. Spenza, and C. Petrioli, “Energy-harvesting wsnsfor structural health monitoring of underground train tunnels,” inComputer Communications Workshops (INFOCOM WKSHPS), 2013IEEE Conference on. IEEE, 2013, pp. 75–76.
[6] B. Chen, K. Jamieson, H. Balakrishnan, and R. Morris, “Span: Anenergy-efficient coordination algorithm for topology maintenance in adhoc wireless networks,” in Proc. of ACM/IEEE 7th International Conf.on Mobile Computing and Networking (MobiCom). ACM, 2001.
[7] A. Keshavarzian, H. Lee, and L. Venkatraman, “Wakeup scheduling inwireless sensor networks,” in Proceedings of the 7th ACM internationalsymposium on Mobile ad hoc networking and computing. ACM, 2006,pp. 322–333.
[8] Y. Wong, L. Ngoh, W. Wong, and W. Seah, “A combinatorics-basedwakeup scheme for target tracking in wireless sensor networks,” inWireless Communications and Networking Conference, 2007. WCNC2007. IEEE. IEEE, 2007, pp. 3569–3574.
[9] R. Zheng, J. Hou, and L. Sha, “Asynchronous wakeup for ad hocnetworks,” in Proceedings of the 4th ACM international symposiumon Mobile ad hoc networking & computing. ACM, 2003, pp. 35–45.
[10] Y. Tseng, C. Hsu, and T. Hsieh, “Power-saving protocols for ieee802.11-based multi-hop ad hoc networks,” in Proc. of INFOCOM, 2002.
[11] J. Polastre, J. Hill, and D. Culler, “Versatile low power media accessfor wireless sensor networks,” in Proceedings of the 2nd internationalconference on Embedded networked sensor systems. ACM, 2004, pp.95–107.
[12] M. Buettner, G. V. Yee, E. Anderson, and R. Han, “X-mac: a shortpreamble mac protocol for duty-cycled wireless sensor networks,” inProceedings of the 4th international conference on Embedded net-worked sensor systems. ACM, 2006, pp. 307–320.
[13] A. El-Hoiydi and J.-D. Decotignie, “Wisemac: An ultra low power macprotocol for multi-hop wireless sensor networks,” Algorithmic Aspectsof Wireless Sensor Networks, pp. 18–31, 2004.
[14] Y. Sun, O. Gurewitz, and D. B. Johnson, “Ri-mac: a receiver-initiatedasynchronous duty cycle mac protocol for dynamic traffic loads inwireless sensor networks,” in Proceedings of the 6th ACM conferenceon Embedded network sensor systems. ACM, 2008, pp. 1–14.
[15] F. Österlind, A. Dunkels, J. Eriksson, N. Finne, and T. Voigt, “Demoabstract: Cross-level simulation in cooja,” in Proceedings of the FirstIEEE International Workshop on Practical Issues in Building SensorNetwork Applications, 2006.
IEEE ICC 2014 - Ad-hoc and Sensor Networking Symposium
281