Embed Size (px)
Citation preview

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
IEEE JOURNAL OF OCEANIC ENGINEERING 1
Actively Controllable Switching for Tree TopologySeafloor Observation NetworksYanhu Chen, Bruce M. Howe, Member, IEEE, and Canjun Yang
Abstract—Cabled ocean observatory systems that provide abun-dant power and broad bandwidth communication enabling un-dersea science have been evolving during the last decade. To es-tablish such permanent infrastructure in the ocean, the technologyof cable network switching and fault isolation with very high re-liability is essential. In this paper, we review existing switchingmethods as applied to a constant voltage tree topology network.Wepropose an actively controllable method that can configure eachbranch of the network only by changing the feeding current; thecurrent level implicitly conveys the switching information. A labo-ratory prototype demonstrated the features of backbone switchingwith zero current and low voltage (less than 20 V), and active con-trollability of the switch.
Index Terms—Cable switching, constant current, high voltage,ocean observation network.
I. INTRODUCTION
T HE ocean covers 70% of Earth with many mysterieswaiting for human discovery, exploration, and under-
standing. During the last several decades, humankind hassampled the ocean using divers, ships, satellites, undersea ve-hicles, moorings, battery powered instruments, etc. However,these approaches are limited to observing processes in theshort term, often not in real time and are far from satisfyingthe scientific demands of long-term real-time observation. Inthis context, many ocean observation projects and plans areunderway [1]. Cabled ocean observatory networks that canprovide abundant power and broad bandwidth communicationto undersea experiments enable the studies of ocean processeson or below the seafloor, in the water column and to the seasurface, over wide time and spatial scales [2]–[4]. Such net-works can be composed of tens of backbone nodes, hundreds
Manuscript received May 04, 2014; revised August 25, 2014 and September23, 2014; accepted October 06, 2014. This work was supported by the NationalNatural Science Foundation of China under Grant 51409229, by the ScienceFund for Creative Research Groups of the National Natural Science Foundationof China under Grant 51221004, by the Zhejiang Provincial Natural ScienceFoundation of China under Grant LQ14E070002, by the National High-TechR&D (863) Program of China under Grant 2012AA09A408, and by the Stateof Hawaii.Associate Editor: T. Maki.Y. Chen is with the Institute of Mechatronics Control Engineering, Zhejiang
University, Hangzhou, Zhejiang 310027 China and also with the Department ofOcean and Resources Engineering, University of Hawaii at Manoa, Honolulu,HI 96822 USA (e-mail: [email protected]).B. M. Howe is with the Department of Ocean and Resources En-
gineering, University of Hawaii at Manoa, Honolulu, HI 96822 USA(e-mail:[email protected]).C. Yang is with the Institute of Mechatronics Control Engineering, Zhejiang
University, Hangzhou, Zhejiang 310027 China (e-mail: [email protected]).Digital Object Identifier 10.1109/JOE.2014.2362830
of removable subnodes, and thousands of scientific instrumentscovering thousands of square kilometers on the seafloor.Currently, there are two major kinds of cabled ocean observa-
tory power systems; both are direct current (dc). In the first, thebackbone cable operates in a constant current (CC) mode withall nodes serially connected. It is used in all submarine telecom-munication cable systems; example observatory systems arethe Development of Ocean-floor Network for Earthquakes andTsunamis (DONET) [5], the MArine Cable Hosted Observatory(MACHO) [6], the Aloha Cabled Observatory (ACO) [7], andthe past projects such as the Hawaii Undersea Geo-Observatory(HUGO) [8], the Versatile Eco-monitoring Network by Un-dersea-cable System (VENUS) in Japan [9], and the Hawaii-2Observatory (H2O) [10]. In the second, the backbone cableoperates at a nominally constant voltage (CV) and all nodes areparallel connected using seawater as a return; example systemsare the North East Pacific Time-Integrated Undersea Net-worked Experiments (NEPTUNE) Canada [11], Regional ScaleNodes (RSN) [12], the Victoria Experimental Network Underthe Sea (VENUS) [13], the Monterey Accelerated ResearchSystem (MARS) [2], and other ongoing systems [14]–[17].The CC system is very robust against ground faults (parts ofthe system can continue to operate through a fault) and thus isfavored for telecom and seismic warning systems. In contrast,a CV system will completely collapse for an extended timewith a single backbone fault (e.g., like a terrestrial blackout).Either kind can be configured in a ring or tree/radial topology;however, the CC system is difficult to branch or mesh whilethis is straightforward for CV. The CV system can deliver morepower and more easily accommodate variable loads. For theselatter reasons, the CVmode appears to be somewhat favored forthe more general, purpose-built, science-driven observatories[18], [19].With either system, fault detection, localization, and isolation
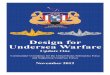
are required, involving a switching system at each node in thesystem. Here we focus on the design of such a system for thecase of a CV tree topology (Fig. 1). Comparing to the loop ormesh topologies, a tree topology is lower cost, less maintenance,and moreover, simpler cable laying with fewer crossings of ex-isting cables in a typical area, for example, the RSN system offthe northwest U.S. coast. A cable observatory system is nomi-nally divided into three layers.1) The primary layer includes the fiber-optic/power backbonecable, the spur cables, and the primary nodes (PNs). Ittransmits high voltage/power (usually 10-kV dc), extentsto regional scale, and provides medium voltage/power in-terfaces for the secondary layer.
0364-9059 © 2014 IEEE. Translations and content mining are permitted for academic research only. Personal use is also permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
2 IEEE JOURNAL OF OCEANIC ENGINEERING
2) The secondary layer includes the extension cablesand the secondary nodes (SNs). It transmits mediumvoltage/power, extents to kilometers away from PNs tocover scientifically interesting areas, and provides stan-dard underwater interfaces for various instruments on theterminal layers.
3) The terminal layer includes all interfaced cables and inde-pendent science-driven instruments that serve at very spe-cific and focused sites.
Reliability is the first priority for such a large-scale underwaternetwork, especially the primary layer, due to the high cost forrepair andmaintenance. The secondary and terminal layers haveindividual power and communication links so they can be easilycontrolled to switch on and off in a passive or active fashionwhen faults appear, to protect the rest of the system. However,similar methods are unavailable on the primary layer for severalreasons:1) there are no off-the-shelf interrupters that can rapidlyswitch high fault current (over tens of amperes) at highvoltage (e.g., 10-kV dc) and have a compact size at thesame time;
2) the fault status is unknown as the communication is un-available when a power fault is present on the primarylayer;
3) locating the fault is difficult as there are multiple spur ca-bles distributed along the backbone cable.
Currently, there is very little research on cable switching forunderwater dc power systems. EI-Sharkawi et al. [20] and Lu[21] proposed a cable-switching and fault-locating method bychanging the voltage level with inverted polarity to act as acommand to control the branching units (BU) of the originalNEPTUNE design. The BUs could autonomously detect andisolate ground faults on the primary layer [20]–[22]. Thismethod can be used for a multiple-shore-station-powered CVsystem and is useful for a ring or mesh-like network. However,it is unable to actively interrupt the cable due to its totallyautonomous feature, and the interrupters may have to switch at500 V with fault current, which is a high potential risk for theinterrupter’s long-term reliability (mechanical breakers). In thesame paper [20], EI-Sharkawi et al. proposed another method inwhich the switching controller relied on the power and commu-nication links of the PN. This method is less feasible as all theinterrupters are employed at 10-kV dc. In the telecom industry,power order controlled method is used to switch BUs/Spurcables underwater such as with the transatlantic cable #8 (TAT8) in which a branching repeater connected a cable from theUnited States with two branches going to the United Kingdomand France [23]. In this case, the BU was a modified repeaterwith high voltage vacuum switching elements integrated andthe breakers operated appropriately in a logic sequence con-trolled by the order in which the branch legs were powered.The NEPTUNE Canada system, which is far more complicatedthan a telecomm network, employs a hybrid CC–CV powersystem. The PNs and the science system run CV; however,the backbone optical amplifier/repeaters throughout, includingthose in the BUs, run CC (modified for higher current). It makesuse of the supervisory capability of the optical communicationssystem (with its proven reliability) to command and control the
backbone BU breakers. Breaker configuration is done in a lowCC mode with attendant low voltage. Thus, if a fault occurs,the highly reliable supervisory functionality of the repeaters isused to control the local switching system. While this method ismore flexible, it does involve more complicated and expensiverepeaters, and the BU.In this paper, a review of the existing methods and how
to modify them to apply specifically to a network with treetopology is presented. After that, a novel cable-switchingmethod that features zero current and nearly zero voltageswitching and active control is proposed.
II. SWITCHING CONCEPTS FOR A TREE TOPOLOGY NETWORK
DC power can be delivered subsea with a single conductorusing a sea water return. The existing conventional submarinetelecommunication cables for deep sea use are of coaxial designwith only one power conductor. Successively from the centerout, the core cable consists of multiple optical fibers enclosedin a small diameter stainless steel tube, steel strength wiresforming a pressure vault around the tube, a conducting/sealingsheath of copper, and polyethylene insulation; diameters aretypically 17 or 21 mm. Additional protective armor is added asnecessary. Using conventional off-the-shelf telecommunicationcable can dramatically reduce the cost and ensure the relia-bility, and make a single conductor CV system feasible. PNsare branched from backbone cable via BUs distributed alongthe backbone cable at reasonable intervals. Inside the BU, thepower conductor is split into two branches and the fibers aredivided into two groups (supposing each PN uses individualfibers back to shore). In a nonswitching network, no breakersare used so that the conductors of the backbone cable and allspur cables are hard wired successively to form the network.There are (at least) three kinds of faults possibly in the primarylayer: ground fault on the backbone cable, ground fault on thespur cables, and ground fault or functional failure of the PNs.Noting that the current returns through sea water to an electrodeon shore, any ground fault in this layer will turn into a short faultand induce the collapse of the power system. For a hard-wirednetwork, a fault in the primary layer will permanently bringdown the entire system until field repaired at sea, assuming thefault location can even be found. Hence, having the ability toswitch out a faulted section from the network is essential sothat the balance of the system can continue to operate, and thefaulted section can be repaired.The existing conceptual designs for cable switching men-
tioned in the Introduction were proposed or applied on ringtopologies and/or mesh-like networks. To make them fit the treetopology (Fig. 1) CV-based network concerned here, severalchanges are made, as shown in Fig. 2. The details of the circuitsor structures are somewhat different than the original ones, butthey use the same concepts and control methods.In Fig. 2(a), the BU has no switching elements and is just
used as a simple branching box. The conductor first routes tothe spur cable and into the PN, where the conductor is split intotwo branches, with powering the local PN directly, another re-turning back to the BU through an interrupter and then to thenext section of backbone cable. When the high voltage starts topower the local PN, the interrupter can be actively controlled

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
CHEN et al.: ACTIVELY CONTROLLABLE SWITCHING FOR TREE TOPOLOGY SEAFLOOR OBSERVATION NETWORKS 3
Fig. 1. Structure of a tree topology cabled ocean observatory network.
via this PN’s communication system, and then the rest of thenetwork will be powered or isolated according to the switchingaction. In this method, isolating is active, fault status can be ob-tained, and only one switching element is employed. However,though it is simple and flexible, some intrinsic weaknesses makeit currently infeasible.1) The spur cable requires two conductors, introducing anadditional cost for cable customization and maintenance(though there are some systems that use dual conductorcable, e.g., DONET [5] and the Tsunami Warning andEarly Response system of Cyprus (TWERC) [24]).
2) The switching is unavailable once the line voltage is belowthe threshold of the PN. For a dc micropower grid that hasrelatively low storage capacity, a short fault will pull thevoltage down below the threshold in several millisecondsor even less, so the switching must act fast enough.
3) Assuming the interrupter can respond and open fast enoughto isolate the fault before collapse, it has to operate at10-kV dc with fault current.
Conventional interrupters that can handle short fault current athigh voltage within milliseconds are of large size and difficultto apply underwater.In Fig. 2(b), the BU is replaced by a modified repeater with
supervisory function. It is powered by the shunt current from thehigh voltage line (e.g., a zener diode), and communicates withthe shore station through optical fibers. Switching elements suchas high voltage vacuum relays are integrated for power interrup-tion, and the switching action can be executed at high voltage,preferably at a more reliable reduced voltage and current level.Favored for the supervisory ability, the switching can be ac-tively controlled in a flexible way as long as the line current fitsthe requirements of the repeater (e.g., NEPTUNE Canada re-peaters operate at up to 8 A). However, the modified repeaterwith power interrupters and associated shore facility compo-nents is tremendously expensive and complicated.Fig. 2(c) is a modified version of El-Sharkawi et al.’s idea
adapted specifically for the tree topology. The BU employstwo interrupters and a switching controller. This controllercontrols the opening and closing of the two interrupters but
only under certain expected and deterministic scenarios. It hasno explicit communication links with the shore station and thelocal PN, hence, it must work in autonomous mode with enoughintelligence to identify the intended operation and protectionprotocols. Using a special fault-detecting and clearing method,the controller can work at a low voltage level. The detailedmethod is presented in Section III. Compared to the previoustwo methods, this one improves and eliminates some of theweaknesses of the former two concepts, such as: it operatesthe interrupters under low voltage, the spur cable has the samestructure as the backbone cable, the control mechanism ismuch simpler than a repeater, and the circuit is smaller so itcan easily fit into a BU. However, this method still needs tointerrupt the fault current even though at reduced voltage level(e.g., 500 V or lower, depending on the cable length and faultcurrent limited at the shore station). Considering the reliabilityand lifetime, switching the interrupter under zero current andvoltage is the best option. Moreover, this method is totallyautonomous, which means active switching on and off of aparticular interrupter is not possible. In some situations, suchas maintaining or updating parts of the network, active discon-nection of certain sections of the network while leaving the restof network powered is necessary and valuable considering thelong time period before a repair can be performed and oceanfield work can be done.To realize active switching and to keep a simple structure
at the same time, an actively controllable method is proposedand presented in Section III. It will apply the similar concept asin Fig. 2(c) but with a totally different control philosophy andcircuit. It is worth noting that the circuit in the BU based oneither this existing method or the upcoming proposed one hasno explicit communication links with the shore station or PNs,so the control actions can only be employed in an offline modein which the system will be shut down for a short period andswitched to a low voltage level at the shore station.
III. DESIGN OF THE OFFLINE SWITCHING BRANCHING UNIT
Reliability is the prime consideration when designing under-water systems. The BU is one part of the cabled network and is

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
4 IEEE JOURNAL OF OCEANIC ENGINEERING
Fig. 2. Three concepts of BU concepts for cabled ocean observation network. (a) BU with no electronics. (b) BU with repeater unit. (c) BU with switching circuit.
Fig. 3. Autonomous switching circuit.
considered to be permanent infrastructure. Therefore, the elec-tronics must be simple, reliable, and have an expected lifetimeas long as the cable. The switching concept in Fig. 2(c) can sat-isfy the requirements, and two methods based on this conceptare presented in this section.
A. Autonomous Switching
The main components of this switching circuit are shown inFig. 3 (modified from the method in [20] and [21])1) Two latch-type interrupters ( and ) route to thebackbone cable and the spur cable respectively. Each hasone each companion closing solenoid and opening sole-noid (e.g., current flowing through solenoid - closesswitch ).
2) The closing circuit (left-hand side of Fig. 3) consists ofthe two closing solenoids ( - and - ), a silicondiode for alternating current (SIDAC, denoted by BD
here), a capacitor , a general high voltage diode ,and a resistor .
3) The opening circuit consists of a zener diode ,a switch controller, the two opening solenoids ( - ,and - ), a resistive voltage divider ( and ) andan optically isolated current sensor on the spur leg. Theground connects to an external electrode.
This BU circuit is autonomous and has five basic operationmodes. As it has no explicit communication links with the shorestation or PNs, a simple method of varying the voltage leveland polarities on the backbone cable is employed to activatethe specific modes as discussed below (i.e., an implicit form ofcommunication).1) Startup mode: The purpose of this mode is to close andlatch all relays. The shore station voltage is set to a positivebut low level such as 500 V. In this case, the openingcircuit is bypassed by and becomes unavailable.Meanwhile, in the closing circuit starts to chargethrough and . When the voltage across rises tothe threshold of the BD, the latter’s impedance switchesfrom a high to very low value, and will dischargethrough the BD as well as - and - . The twointerrupters will close and latch in the closing position atthe same time. After is closed, the circuit in the nextBU repeats the same action as well, until all interruptersin the network are closed. Note that the PNs start up onlybetween 7 and 12 kV, hence, a PN is an open point inthis mode.
2) Fault locating mode: The system will switch off (collapse)from the normal mode when there is a fault in the primary

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
CHEN et al.: ACTIVELY CONTROLLABLE SWITCHING FOR TREE TOPOLOGY SEAFLOOR OBSERVATION NETWORKS 5
layer. The shore station then energizes the network witha low level positive voltage. The power level depends onthe fault current, regulating the voltage to make sure thefault current is lower than the maximum allowed value.As the voltage is positive, all interrupters remain closed.Since the fault point will have the same electrical poten-tial as sea ground, most of the current will go through thefault point (a slight part of the current will flow through theclosing circuits to the local sea ground). The shore stationcan calculate and locate the fault point using an algorithmof voltage versus current (V/I) measurements based on theknowledge of the cable parameters (i.e., resistance). Oncethe fault location is confirmed, the system enters fault iso-lation mode.
3) Fault isolation mode: The shore station energizes thesystem with 500 V. Due to the ground fault, there isfault current through the backbone cable. The switchcontroller is activated by the voltage drop acrossand powered by it as well. Two kinds of faults may bepresent and require different treatments. All controllersfirst detect current at their own spur cables by the currentsensors. If there is current, it means a fault located in thisspur cable (the PNs remain off because of the low voltage)and - will be triggered to open in a fixedperiod , which is counted from when the controllers areactivated. After , if the fault does not clear, it means thefault is in the backbone cable, and then each controller willcalculate the distance of the local BU from the fault pointby measuring the local line voltage through the resistivedivider ( and ) and open after a time delaythat is proportional to the calculated distance. The nearestBU to the fault will have the smallest line voltage and,in turn, the smallest and open the interrupter first toisolate the fault. After that, no current flows through thebackbone cable and all switch controllers are disabledautonomously. Note that the closing circuit is disabled inthis mode due to the presence of diode .
4) Normal operation: When there is no fault or the fault isclear, the shore station can feed 10 kV and power up allPNs. The controller will disable its switching function ifthe voltage across exceeds a specific value that indi-cates the system is working in the normal mode, therebyavoiding any possibility of mistriggering.
B. Actively Controllable Switching
The significant merit of a CC system is that it is robust againstground faults as its current remains unchanged, even shorted.Without considering the lower power efficiency, smaller powercapacity, and more difficult extension capability, CC is an ex-cellent solution for a small power network. In contrast, the CVsystem features higher power efficiency, larger capacity, andbetter extension capability, and is more preferable for a largenetwork, though it is more vulnerable to ground fault. There-fore, if both CC and CV are employed on the same network,with the CV working in the normal situation and CC workingin a fault mode, then the network will feature the advantages of
Fig. 4. Actively controllable switching circuit.
both CC and CV. As shown in Fig. 4, this is the proposed solu-tion.1) Basic Circuit: The main components for this solution in-
clude the following.• Two latch-type interrupters ( and ) route to thebackbone cable and spur cable through diodes ( and
), respectively. Each one has one companion closingsolenoid and opening solenoid.
• The switching circuit consists of a switch controller, thetwo closing solenoids ( - and - ), the twoopening solenoids ( - and - ), a current sensingresistor , a zener diode , and a high voltagediode .
• Besides the electronics in the BU, there is an anode termi-nating at of the last BU.
2) Operating Modes: Due to the presence of diodes, the cur-rent path in the BU depends on the voltage polarity setting atthe shore station, i.e., if it is negative, the current goes througheither interrupter, depending on their closing states, else the cur-rent goes through the switching circuit. Noting that the PNs onlywork between 7 and 12 kV, we can feed power onto the net-work with negative CV so that all the closed PNs work or posi-tive CC, and all the switching circuits work. Based on this fea-ture, the cable switching can be actively configured. There arethree modes of this solution.• Configuring mode: The shore station switches to positivelow voltage, low CC system. In this mode, the current goesthrough , , and of the BUs and returnsfrom the anode through the sea water. The controller is ac-tivated by the voltage drop across and powered byit. In this mode, no matter what status of the two inter-rupters, the current on the backbone cable is unaffected.The controller can switch the interrupters on or off by justtriggering the corresponding solenoids. However, the trig-gering command lacks a transmission path as the BU hasno explicit communication links to the shore station andPNs. Therefore, we use various settings for the shore sta-tion power current as a means to communicate the com-mand information to the BU. A stable current value repre-sents a specified command. In the BU, the controller rec-ognizes the command by measuring the current through

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
6 IEEE JOURNAL OF OCEANIC ENGINEERING
, then employs the matched switching action, andlatches the interrupters in position.
• Normal operating mode: After configuring, the shore sta-tion can switch to CV mode and provide 10 kV to powerup the network. In this mode, the current only goes throughthe closed interrupters and bypasses the controller, thus thecurrent varying on the backbone cable does not affect theinterrupter status.
• Fault-locating mode: If a fault is not serious enough to pulldown the line voltage below the PN threshold, the controlserver in the shore station can analyze the fault by esti-mating each node’s voltage and current. The presence ofthe fault can be determined and approximately located bycombining the shore station feeding voltage and currentand the already known physical parameters of the cables.If a fault induces power collapse, two methods can be em-ployed to locate the fault, both working under the config-uring mode. The first one is first trying to close all inter-rupters (if the fault is on the backbone cable, those inter-rupters beyond the fault point will remain unaffected), thenenergizing the system with negative low current or lowvoltage and using the V/I measurement to locate the faultpoint. The second one is first trying to open all interrupters(if the fault is on the backbone cable, those interrupters be-yond the fault point will remain unaffected), then closingthem one by one and energizing the system with negative100 V after closing each one to check if there is a fault cur-rent. The presence of a fault current indicates that the lastclosing interrupter is closest to the fault. Once the fault isdetected and located, the shore station switches to the con-figuring mode and isolates the fault based on the previousresult.
3) Communicating by Varying Current Level: As proposed,switching is executed only when the line current fits a specificpreconfigured value (called the switching current) during theconfiguring mode. Each BU has two interrupters (one to con-tinue the backbone, and one to the local spur), each of whichin turn has two basic switching statuses (on or off), thereforefour corresponding switching current values are employed tofully operate one BU. Here, we use and to describe theswitching statuses and currents of the interrupters in BU , re-spectively, and the logic of each can be described by
----
(1)
in which and are the desired statuses of thetwo interrupters in BU (1 for on and 0 for off, respectively);
- , - , - , and - are the switchingcurrent values for the corresponding statuses. Therefore, eachcontains four values. We suppose the four current values are
discrete in sequence so that
(2)
Here is the value for current discretization, is the min-imum current for reliable operation, and the indexesand adjust the element values of distributed from
. To make the elements proportionally distributed, the twoindexes must satisfy . In the following examples andtests, and are selected as a case.If the network has BUs, then the switching status matrix
can be described by
......
(3)
where each row describes the two interrupter statuses. Theswitching current matrix representing control commands canbe written as
......
(4)
where each row describes the switching currents of the two in-terrupters. Then, the relationship of and is obtained in
......
......
......
(5)
At the same time, the current values must be smaller than themaximum allowance value , which is generally limited bythe inline electronics such as repeater or the BU controller, so
must satisfy
(6)
From (6), we can calculate the maximum number of BUs
(7)
The sequential transmissions of the elements of the matrixprovide the information to the controllers in each BU necessaryto perform the required function, as specified in .4) Practical Considerations: When a mechanical relay
opens, arc current may be produced if the voltage across theswitch contacts builds up and exceeds the dynamic withstandingvoltage, which is proportional to the separated distance of thecontacts, and restrike is a common phenomenon in whichthe switch contacts attach and detach (or bounce) severaltimes during the switching of the relay. In both cases, arcphenomenon may occur while operating the interrupters athigh voltage (over hundreds of volts), especially when restrikeexists. Because the heat generated by the arc may seriouslydamage the switch contacts, the switching voltage and current

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
CHEN et al.: ACTIVELY CONTROLLABLE SWITCHING FOR TREE TOPOLOGY SEAFLOOR OBSERVATION NETWORKS 7
Fig. 5. Structure of the lab simulation system.
should be as low as possible to ensure the long-term reliability.It is worth noting that when closing or opening the interruptersin the present method, the switching current is zero (no currentgoes through the interrupters during the configuring mode) andthe switching voltage is equal to the sum of the voltage across
, , and , which is usually less than 20 V, sothe interrupters switch at zero current and nearly zero voltage.Comparing this method to the former referenced methods thatswitch the interrupters at 500 V with fault current, this one isexpected to have a much higher reliability.In this method, all interrupters in the network can be easily
controlled with the following advantages.1) Any section before fault point of the network can beswitched on and off, regardless of whether there is a fault.This allows maintenance of part of the network while therest of the system remains operational.
2) All interrupters are operated under zero current and nearlyzero voltage which will maximize their lifetime and relia-bility.
3) Fault detecting and locating can be determined by mea-suring the fault current when applying a very low negativevoltage on the network.
4) There is no need for extra fibers or an explicit communica-tion channel between the shore station and BUs.
5) The BU circuit does not need to refer to a local sea ground,benefiting the long-term operation of the BU.
Considering that the control of the interrupters only needssimple commands, the method of varying current to provide asignal is feasible and robust.
IV. PROTOTYPE SETUP AND TESTS
The autonomous switching method applied for ring topologynetwork was tested in [19]. Its modified version presented inFig. 3 was built and tested, verifying the previous results. In thispaper, we will present a testing platform with two BUs (Fig. 5)using the actively controllable switching method.The prototype system included all the components described
in Fig. 4. The two interrupters were latch-type single-polesingle-throw mechanical switches. Their solenoids had thesame equivalent impedance of 100 and were operated at 15V. As this was a logical function prototype, these interruptersare only rated at 300 V, 25 A, however, they could be replacedby higher voltage vacuum relays without modification to thiscircuit. The two diodes and were used to preventthe current flowing through the interrupters when in the config-uration mode, and their voltage stress was always less than 20V in any mode. Diode , however, was required to endure
10 kV and had a very low leakage current. Therefore, wechose an off-the-shelf power diode with the maximum reversevoltage rating at 12 kV and peak reverse current lessthan 1 mA. The controller was a logical circuit with functionsof measuring the line current, comparing the measured currentwith the stored value that was hardware configured, drivingthe solenoids and calculating the time interval. When the shorestation feeds the system with a constant current, the line currentis supposed to be an exact value in steady state. However, thecurrent will oscillate, and for a short period be in a transientstate because of the presence of the large parasitic cable in-ductance and capacitance associated with a large network. Inthis case, the controller may execute a wrong command. Toeliminate these undesirable effects, the controller executes thecommand only after satisfying the following rules.1) The controller provides a current matching window ,with the center the target current and the width smaller than. This rule can guarantee the reliability of command
recognition.2) When comparing the line current with the target value, thelogic circuit provides a hysteretic function in case the cur-rent oscillating at the edge of the matching window mightlead to a repeating switching action. This hysteretic width
should be smaller than half the difference of andin case there is an overlap between two adjacent cur-
rent matching windows.3) The controller measures the time interval when the cur-rent is in the matching window. It will not trigger theswitching until the matching time reaches a presetvalue. The reason is, because the line current may travelcontinuously between and and will probably fallinto the matching window during the transition, a proper
will avoid a mistrigger. Configuring can modifythe switching sensitivity. Meanwhile, the power feedingequipment for regulating the line current on shore shouldbe able to step to the target value in millisecond.
In the prototype, could handle current up to 3 A, and thecontroller required an auxiliary power supply of 15 V, 0.25 A,so we fixed 3 A, 0.3 A, 0.05 A,0.03 A, 0.005 A, and 1 s. From (4), we ob-tained . Considering the number of PNs is usu-ally less than 10, this prototype system could satisfy most sit-uations. Based on these settings, we built a two-BU prototypelaboratory system, as shown in Fig. 5. Long length submarinecable has resistive, inductive, and capacitive components foreach differential length. Detail analyses using “ ” or RLC cir-cuits (simple models composed by resistors, inductors, and ca-pacitors) are adopted in some studies [25]. In this case, only low

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
8 IEEE JOURNAL OF OCEANIC ENGINEERING
frequencies were of concern, and, therefore, we used a simpli-fied one-section RLC circuit to model a 50-km cable, in whicha serial 4.7-mH inductance, a serial 50- resistor, and a par-allel 10-uF capacitor were included. The PNs were replaced byopen points since they had high (infinite) impedance during theconfiguring mode. Following (1) and (2), we calculated the cur-rent command matrix. Tests were carried out with and withoutfault. When there was no fault or one fault existed in one spurcable, all relays could be configured following the proceduresdescribed in Section III. If fault existed on the backbone cablesuch as between BU and BU , BU became unavailable be-cause of the fault. In this scenario, the fault point became theanode and in BU was open. With the advantage of the CCsystem, active controlling and switching of any interrupters inthe network were easily realized, no matter if there was a fault.As there is no feedback signal indicating the state of each
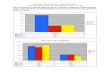
relay, the relays must behave accurately when current com-mands are sent out. To validate the switching behaviors of allrelays, a test of regulating the line current from 0.27 to 0.7 A,including all the current commands of closing and openingeach relay, was carried out. The result is shown in Fig. 6in which only the acting behaviors of the relays in BU areshown to make a clear illustration. According to (1) and (2),the current commands for closing and opening andin BU were 0.325 A, 0.375, 0.42, and 0.475 A, respectively.Considering 0.03 A, the actual corresponding currentcommand scales should be [0.310 A, 0.340 A], [0.360 A, 0.390A], [0.410 A, 0.440 A], and [0.460 A, 0.490 A]. The linecurrent was manually controlled to rise from 0.27 A with astep of 8 2 mA. As the matching time 1 s, each stepperiod lasted for 2 s under manual control. In the tests, we usedan independent circuit to check the status of the relays; 48 Vindicated closed and 0 V indicated open. representedthe voltage across component . When the current reached0.312 A and lasted for 1 s, voltage across the solenoid -turned high and was closed in approximately 7 ms. Whenthe line current reached 0.364 A and lasted for 1 s, wasopened. For , it was closed at 0.416 A and opened at0.464 A. Only during each current window, the voltage of thecorresponding solenoid stayed high, otherwise it stayed low,e.g., during , - - was 15 V, otherwise, it was 0 V.There were appropriate current gaps between current windows,so each command was executed as expected only when theline current matched the current window and lasted over .These series of lab tests validate that the proposed CC methodis feasible for controlling the switching of the CV-based treetopology network.
V. DISCUSSION
For a real system that involves hundreds of kilometers ofcable and up to 10-kV high voltage power, some considerationsneed to be addressed when applying the actively controllablemethod for cable switching.1) The mechanical interrupters and diodes employedin the prototype had low voltage withstand ratings andshould be replaced with appropriately rated components.The other electronics such as the controller and otherdiodes, however, are unnecessary to change as they are
Fig. 6. Switching behaviors of BU . - represents the voltage across thecomponent ; represents the actual current window.
isolated from the sea ground potential and only poweredby local low voltage power and clamped at less than 20 V,so that their voltage stress will remain unchanged for anyoperating voltage case. (Of course, appropriately qualifiedcomponents should be used.)
2) To increase the line current capability to reflect the max-imum number of controllable BUs, in the prototypecan be replaced by a single zener diode with higher cur-rent capacity or a cluster array with multiple parallel gen-eral zener diodes, however, for the configuration model towork as proposed there is a limit for the number of BUs inthe system, determined by the total range and magnitude ofsteps of the current signal, and the design requires differentcurrent threshold configurations at different BUs, both ofwhich might constrain the expandability of the network.
3) Fiber-optic repeaters may be integrated to increase the op-tical power for cable lengths over 100 km. As a repeaterrequires a minimum line current to power itself,should be greater than the repeater’s minimum current(typically 0.3–0.6 A). While most repeaters are limitedto a maximum current (typically less than 2 A), in mostobservatory situations using CV for normal operations,repeaters should be modified to enable higher current, e.g.,10 A.
4) The parasitical inductance, resistance, and capacitance fora several hundred kilometer cable are considerable and willaffect the rise time of the current step response, espe-cially at the farthest BU where can reach up to millisec-onds. This requires careful calculation to make sure the in-terval is at least two times larger than of the farthestBU.
5) Natural phenomena, such as tides, steady ocean waterflows, telluric currents, and geomagnetic fluctuationsassociated with solar diurnal variation, induce fluctuatingcurrents on transoceanic cables. The same phenomena mayoccur on large underwater cabled observation systems.According to present knowledge and understanding, theinduced voltage on the unpowered transoceanic cable isusually less than 1 mV/km [26], so that the current is less

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
CHEN et al.: ACTIVELY CONTROLLABLE SWITCHING FOR TREE TOPOLOGY SEAFLOOR OBSERVATION NETWORKS 9
than 1 mA, much smaller than . Therefore, the generalinduced current does not affect this switching method ona powered cabled system. However, intense solar stormsmay induce extra high potential on the long cable ofunderwater power systems and destroy the insulation, asoccurs with the terrestrial power grid. The BU electronicsbased on the proposed method, however, is electricallyisolated from the BU pressure vessel and only associatedwith current magnitude, so that it is expected to be lessvulnerable from the over voltage on the cable.
6) The proposed cable switching method takes the benefitsof a CC system, and works for a tree topology with onebackbone cable and various spur cables from the branchingunits. However, it does not work for some topologies suchas network with multiple branches or mesh-like networkwhere the main current is distributed to multiple branches.
VI. CONCLUSION
As cabled ocean observation networks become a morecommon seafloor platform for science research, cable switchingand fault isolation remain essential functions to enhance re-liability. We reviewed the present switching concepts andcorresponding methods for constant-voltage-based cabled net-works and proposed an actively controllable constant currentswitching method for the tree topology network. Theoreticalanalysis and prototype tests show that it is more flexible andsimpler than other methods. Moreover, the switching occursat zero current and nearly zero voltage, which can prolong thelifetime of the interrupters to the greatest extent.
ACKNOWLEDGMENT
The authors would like to thank A. Lecroart from Alcatel-Lucent (Boulogne-Billancourt, France) and D. W. Harris fromthe University of Hawaii at Manoa (Honolulu, HI, USA) fortheir suggestions. They would also like to thank F. Zhang fortechnical assistance on designing the prototype.
REFERENCES
[1] National Research Council, Enabling Ocean Research in the 21st Cen-tury: Implementation of a Network of Ocean Observatories. Wash-ington, DC, USA: The National Academies Press, 2003, pp. 13–26.
[2] P. Favali and L. Beranzoli, “Seafloor observatory science: A review,”Ann. Geophys., vol. 49, pp. 515–567, 2006.
[3] A. D. Chave, G. Waterworth, A. R. Maffei, and G. Massion, “Cabledocean observatory systems,” Mar. Technol. Soc. J., vol. 38, no. 2, pp.30–43, 2004.
[4] B. M. Howe et al., “A smart sensor web for ocean observation: Fixedand mobile platforms, integrated acoustics, satellites and predictivemodeling,” IEEE J. Sel. Top. Earth Observat. Remote Sens., vol. 3,no. 4, pt. 1, pp. 507–521, Dec. 2010.
[5] K. Kawaguchi, Y. Kaneda, and E. Araki, “The DONET: A real-timeseafloor research infrastructure for the precise earthquake and tsunamimonitoring,” inProc. MTS/IEEEKobe TECHNO-OCEANConf., 2008,DOI: 10.1109/OCEANSKOBE.2008.4530918.
[6] S. K. Hsu, C. S. Lee, and T. C. Shin, “Marine cable hosted obser-vatory (MACHO) project in Taiwan,” in Proc. Symp. UnderwaterTechnol./Workshop Sci. Use Submarine Cables Related Technol.,2007, pp. 305–307.
[7] B. M. Howe, R. Lukas, F. Duennebier, and D. Karl, “ALOHA cabledobservatory installation,” in Proc. OCEANS Conf., 2011, pp. 1–11.
[8] F. K. Duennebier et al., “HUGO: The Hawaii undersea geo-observa-tory,” IEEE J. Ocean. Eng., vol. 27, no. 3, pp. 218–227, Jul. 2002.
[9] J. Kasahara, Y. Shirasaki, andH.Momma, “Multidisciplinary geophys-ical measurements on the ocean floor using decommissioned subma-rine cables: VENUS project,” IEEE J. Ocean. Eng., vol. 25, no. 1, pp.111–120, Jan. 2000.
[10] R. A. Petitt et al., “The Hawaii-2 observatory,” IEEE J. Ocean. Eng.,vol. 27, no. 2, pp. 245–253, Apr. 2002.
[11] J. R. Delaney et al., “NEPTUNE: Real-time, long-term ocean and earthsciences at the scale of a tectonic plate,” Oceanography, vol. 13, no. 2,pp. 71–79, 2000.
[12] P. Yinger et al., “Commissioning of a system that terminates on theseafloor,” in Proc. OCEANS Conf., San Diego, CA, USA, 2013, pp.1–6.
[13] S. M. Taylor, “Transformative ocean science through the VENUSand NEPTUNE Canada ocean observing systems,” Nuclear Instrum.Methods Phys. Res. A, vol. 602, pp. 63–67, 2009.
[14] G. Pawlak et al., “Development, deployment, and operation of KiloNalu nearshore cabled observatory,” in Proc. OCEANS Eur. Conf.,2009, pp. 133–142.
[15] I. G. Priede, R. Person, and P. Favali, “European seafloor observatorynetwork,” Sea Technol., vol. 46, no. 10, pp. 45–49, 2005.
[16] P. Favali and L. Beranzoli, “EMSO: European multidisciplinaryseafloor observatory,” Nuclear Instrum. Methods A, vol. 602, no. 1,pp. 21–27, 2009.
[17] Y. H. Chen, C. J. Yang, D. J. Li, B. Jin, and Y. Chen, “Study on 10kVDC powered junction box for cabled ocean observatory system,”China Ocean Eng., vol. 27, no. 2, pp. 265–275, 2013.
[18] B. M. Howe, H. Kirkham, and V. Vorpérian, “Power system consider-ations for undersea observatories,” IEEE J. Ocean. Eng., vol. 27, no.2, pp. 267–275, Apr. 2002.
[19] J. Kojima, B. M. Howe, K. Asakawa, and H. Kirkham, “Powersystems for ocean regional cabled observatories,” in Proc. MTS/IEEETECHNO-OCEAN Conf., 2004, pp. 2176–2181.
[20] M. El-Sharkawi et al., “North East Pacific Time-Integrated UnderseaNetworked Experiments (NEPTUNE): Cable switching and protec-tion,” IEEE J. Ocean. Eng., vol. 30, no. 1, pp. 232–240, Jan. 2005.
[21] S. Lu, “Infrastructure, operations, and circuits design of an underseapower system,” Ph.D. dissertation, Dept. Electr. Eng., Univ. Wash-ington, Seattle, WA, USA, 2006.
[22] T. Chan, C. C. Liu, B. M. Howe, and H. Kirkham, “Fault location forthe NEPTUNE power system,” IEEE Trans. Power Syst., vol. 22, no.2, pp. 522–531, May 2007.
[23] D. Gunderson, A. Lecroart, and K. Tatekura, “The Asia Pacific cablenetwork,” IEEE Commun. Mag., vol. 34, no. 2, pp. 42–48, Feb. 1996.
[24] G. Georgiou, A. M. Clark, G. Zodiatis, D. Hayes, and D. Glekas, “De-sign of a prototype tsunami warning and early response systemfor Cyprus-TWERC,” in Proc. OCEANS Conf., 2010, DOI:10.1109/OCEANSSYD.2010.5603936.
[25] J. J. Grainger and W. D. Stevenson, Jr., Power System Analysis, ser.International Editions. NewYork, NY, USA:McGraw-Hill, 1994, ch.6.
[26] A. Meloni, L. J. Lanzerotti, and G. P. Gregori, “Induction of currentsin long submarine cables by natural phenomena,” Rev. Geophys. SpacePhys., vol. 21, pp. 795–803, 1986.
Yanhu Chen received the B.S. and Ph.D. degreesin mechanical engineering from Zhejiang University,Hangzhou, Zhejiang, China, in 2007 and 2012, re-spectively.He is currently a Research Assistant with the Insti-
tute of Mechatroincs Control Engineering, ZhejiangUniversity, and also a Postdoctoral Research Fellowwith the Department of Ocean and Resources Engi-neering, University of Hawaii at Manoa, Honolulu,HI, USA. His research interests include cable oceanobservation and high voltage power conversion and
transmission.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
10 IEEE JOURNAL OF OCEANIC ENGINEERING
Bruce M. Howe (M’05) received the B.S. degreein mechanical engineering and the M.S. degreein engineering science from Stanford University,Stanford, CA, USA, both in 1978 and the Ph.D.degree in oceanography from the Scripps Institutionof Oceanography, University of California SanDiego, La Jolla, CA, USA, in 1986.From 1986 to 2008, he worked at the Applied
Physics Laboratory, University of Washington,Seattle, WA, USA, and is currently a Professor in theOcean and Resources Engineering Department, Uni-
versity of Hawaii at Manoa, Honolulu, HI, USA. While at Stanford University,he developed laser Doppler velocimetry (LDV) instrumentation for air–seainteraction experiments. From 1979 to 1981, he was a Research Associate withthe Institut für Hydromechanik, Universität Karlsruhe, Karlsruhe, Germany,working on LDVs for use in the atmospheric boundary layer. While at theScripps Institution and since then, he has worked on many ocean acoustic to-mography projects, including moving ship tomography, acoustic thermometryof ocean climate (ATOC), and the North Pacific Acoustic Laboratory (NPAL).He helped establish ongoing ocean observatories efforts, and is working onfixed infrastructure (e.g., cable systems and moorings), mobile platforms(e.g., gliders as navigation/communications nodes and acoustic receivers),and hybrids (e.g., moored vertical profilers). A goal is to integrate acoustics
systems in ocean observing to support navigation, communications, timing,and science applications.
Canjun Yang received the B.S. and M.S. degreesin mechanical engineering from the University ofAeronautics and Astronautics, Nanjing, China, in1991 and 1994, respectively, and the Ph.D. degree inmechanical engineering from Zhejiang University,Hangzhou, Zhejiang, China, in 1997.Since 1997, he has been with Zhejiang Uni-
versity, where he is currently a Professor and theVice-Director of the Institute of Mechatronic andControl Engineering, and a member of the NationalIndustrial Technological Innovation Union Council
for Rehabilitation Technical Aids. His current research interests includeman–machine intelligent mechatronic systems and deep-sea mechatronicequipment techniques.Prof. Yang received the Second Prize of the National Award for Technical
Invention in 2009.