Embed Size (px)
Citation preview
IEEE MASS 2007, Pisa, Italy 9 Oct 20071
An Adaptive Delay-Minimized Route Designfor Wireless Sensor-Actuator Networks
Edith C.-H. Ngai1, Jiangchuan Liu2, and Michael R. Lyu1
1Department of Computer Science and Engineering, Chinese University of Hong Kong, Hong Kong2School of Computing Science, Simon Fraser University, BC, Canada
2
Outline
• Introduction• Related Work• Route Design Problem (RDP)• Probabilistic Route Design (PROUD) Algorithm• Distributed Implementation• Enhancements• Simulations• Conclusion

3
WSN• Distributed and large-scale network like
the Internet• A group of static sensors
• resource constrained• wireless communications
Introduction

4
WSAN• Collection of sensors and actuators
• Sensors• numerous resource-limited and static devices
• monitor the physical world
• Actuators• resource-rich devices equipped with more energy, stronger
computation power, longer transmission range, and usually mobile
• make decisions and actuate adaptively in response to the sensor measurements
Introduction
5
Mobile Elements
• Architecture using moving entities (Data Mules) to collect sensor data [Shah et. al. SNPA’03]
• Mobile sinks with predictable and controllable moving pattern [Chakrabarti et al. IPSN’03, Kansal et al. Mobisys’04]
• Mobile sinks can find the optimal time schedule to stay at appropriate sojourn points [Wang et al. HICC’05]
• Message ferry (MF) approach to address the network partition problem in sparse ad hoc network [Zhao et al. Mobihoc’04]
Related Work
6
Mobile Elements (cont.)
• Joint mobility and routing algorithm with mobile relays to prolong the network lifetime [Luo et al. Infocom’05]
• Partitioning-based algorithm to schedule the movement of mobile element (ME) to avoid buffer overflow and reduce minimum required ME speed [Gu et al. Secon’05]
• Using of mobile sensors and controlled mobility to provide quality of coverage on the fraction of events captured [Bisnik et al. Mobicom’06]
• Vehicle routing problem (VRP)• Considers scheduling vehicles stationed at a central
facility to support customers with known demands• Minimize the total distance traveled
Related Work
7
Network Model
• We consider a WSAN with M mobile actuators and N static sensors
• Each of the sensors and actuators are equipped with a wireless transceiver
• Actuators move in the sensing field along independent routes, at constant or variable speeds
• Each static sensor has a limited buffer to accommodate locally sensed data
• When an actuator approaches, the sensor upload the data to actuator and free its buffer
• Sensors have different weights, according to their data generation rates or event frequencies
• Sensors with higher weights expect shorter average actuator inter-arrival times
Route Design Problem (RDP)

8
Route Design Problem (RDP)
Route Design Problem (RDP)
9
Adaptive Delay-Minimized Route Design
• To minimize the data collection time in a stochastic and dynamically changing sensing environment
• We propose a probabilistic route design algorithm (PROUD) for wireless sensor-actuator networks
• This is a departure from the previous static and deterministic mobile element scheduling problems
• PROUD offers delay-minimized routes for actuators and adapts well to network dynamics and sensors with non-uniform weights
• This is achieved through a probabilistic visiting scheme along pre-calculated routes
Adaptive Delay-Minimized Route Design (PROUD)

10
Small-scale Network
• STEP 1: Form a Priori Route• A priori route is formed by constructing a TSP path
which contains all locations to be visited• Many polynomial-time approximation algorithm has
been proposed for the NP-hard TSP problem• We adopt the well-known Approx-TSP-Tour
algorithm here for its low cost and bounded performance
Adaptive Delay-Minimized Route Design (PROUD)

11
Small-scale Network
• STEP 2: Visit sensors probabilistically• Actuators visit the sensors on
the priori route in sequence probabilistically
• We set the visiting probability pi of a location i to be wi, where wi is the (normalized) weight of the sensors
• Sensors with higher weights should be assigned with a higher probability
Adaptive Delay-Minimized Route Design (PROUD)
12
Small-scale Network
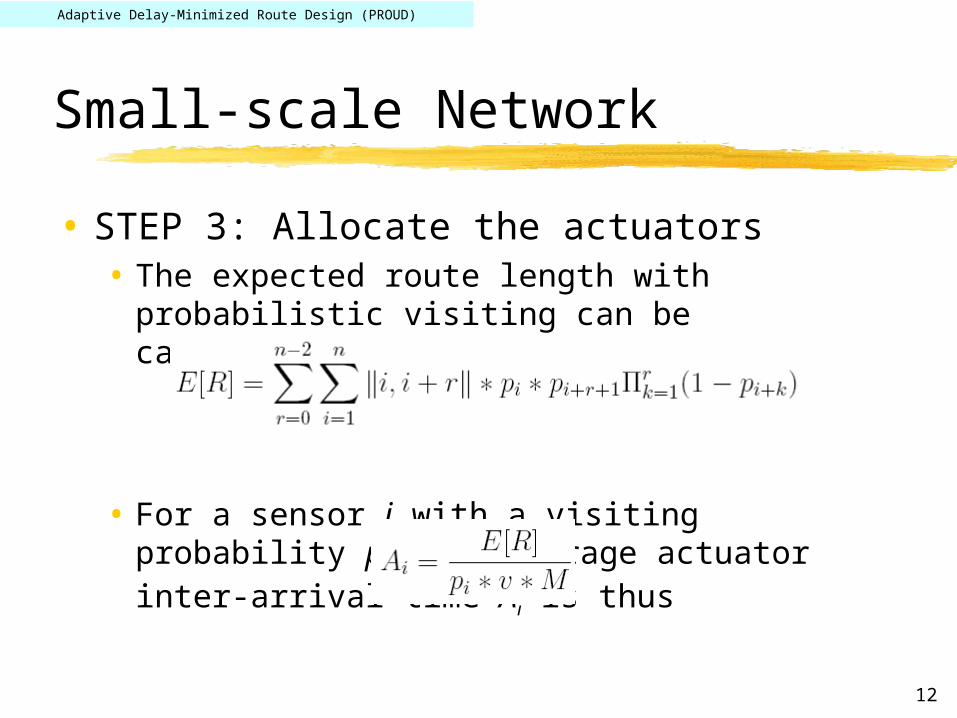
• STEP 3: Allocate the actuators• The expected route length with probabilistic visiting
can be calculated as
• For a sensor i with a visiting probability pi, its average actuator inter-arrival time Ai is thus
Adaptive Delay-Minimized Route Design (PROUD)
13
• Time complexity analysis:
• Bound analysis:
Analysis
Adaptive Delay-Minimized Route Design (PROUD)
14
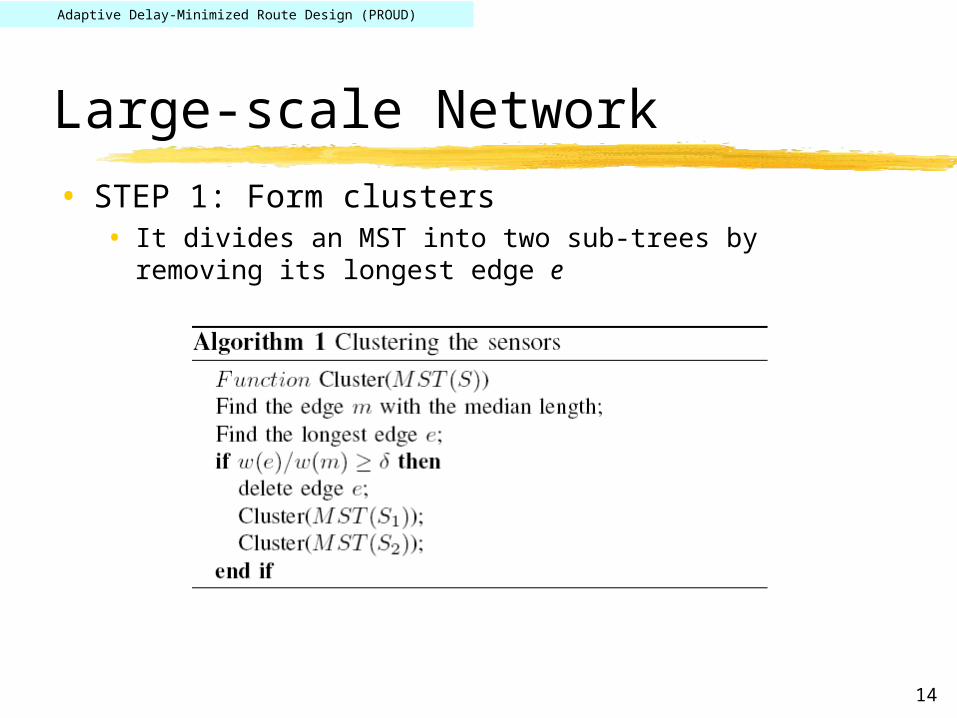
Large-scale Network
• STEP 1: Form clusters• It divides an MST into two sub-trees by removing its longest
edge e
Adaptive Delay-Minimized Route Design (PROUD)
15
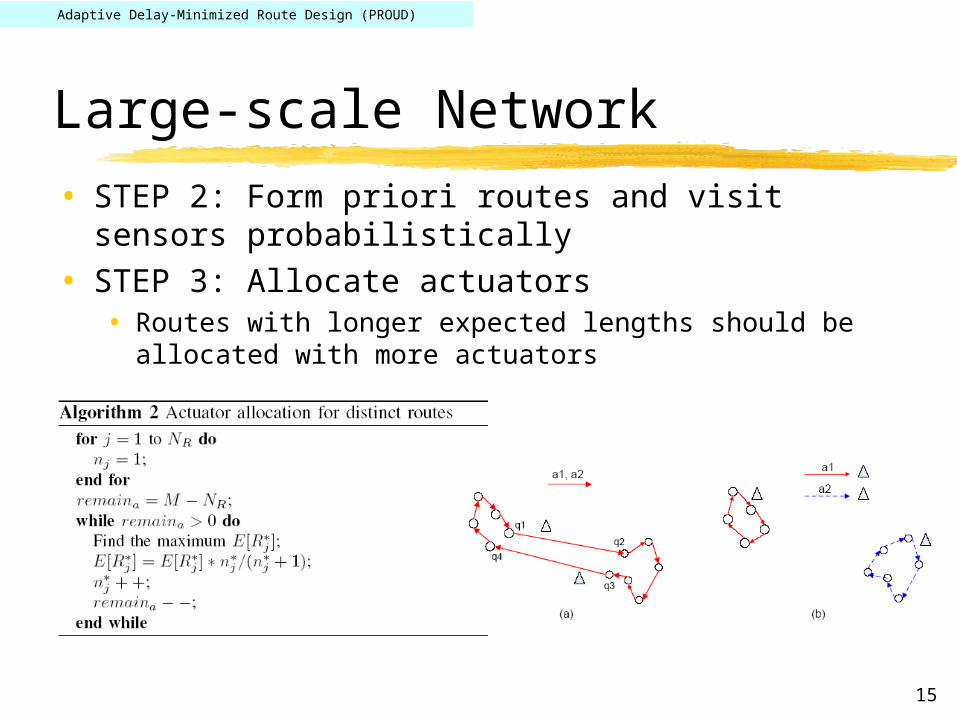
Large-scale Network
• STEP 2: Form priori routes and visit sensors probabilistically
• STEP 3: Allocate actuators• Routes with longer expected lengths should be allocated with
more actuators
Adaptive Delay-Minimized Route Design (PROUD)

16
• STEP 1: Forming R-clusters
• Sensors construct MSTs locally by communicating with neighbors
• Weight of each edge e in MST is smaller than communication range Rs
• We refer such an MST as an R-Cluster, RC(V,E), which includes all the sensors that are within Rs to some sensors in RC(V,E)
• The cost of the R-cluster is denoted by Cost(RC), which is the sum of w(e) in RC(V,E)
Distributed Implementation
Distributed Implementation

17
• STEP 2: Connecting R-clusters • We divide the network into M subareas, each of which is explored by one
actuator
• Each actuator looks for the R-clusters in its area and connects them if they are within a certain distance, say |RC1,RC2| <= ξ
• The new cluster is formed with cost Cost(RC1) + Cost(RC2) + |RC1,RC2|
• Similarly, the actuators also connect their R-clusters/clusters with those in their neighboring areas:
Distributed Implementation
Distributed Implementation
18
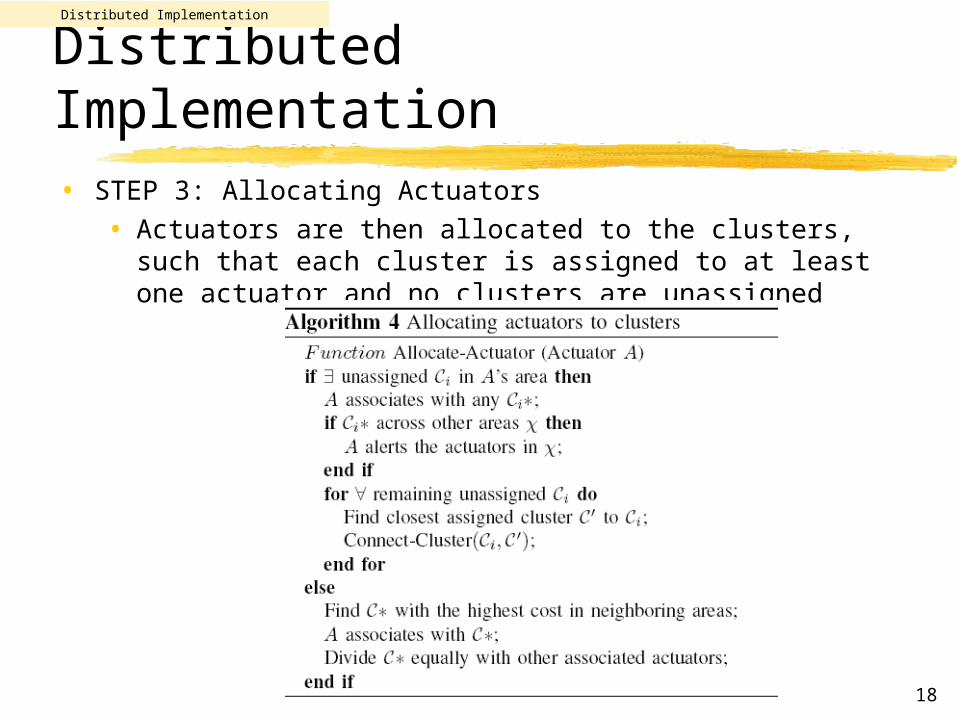
• STEP 3: Allocating Actuators
• Actuators are then allocated to the clusters, such that each cluster is assigned to at least one actuator and no clusters are unassigned
Distributed Implementation
Distributed Implementation
19
Enhancements• Actuators with Variables Speeds
• By adjusting the speeds of the actuators, we can ensure sensors with the same visiting probability can achieve similar inter-arrival times
• Assume that node i on Rj has a probability pi of being visited by actuator j every cycle. Its average actuator inter-arrival time Ai can be calculated as
Enhancements
20
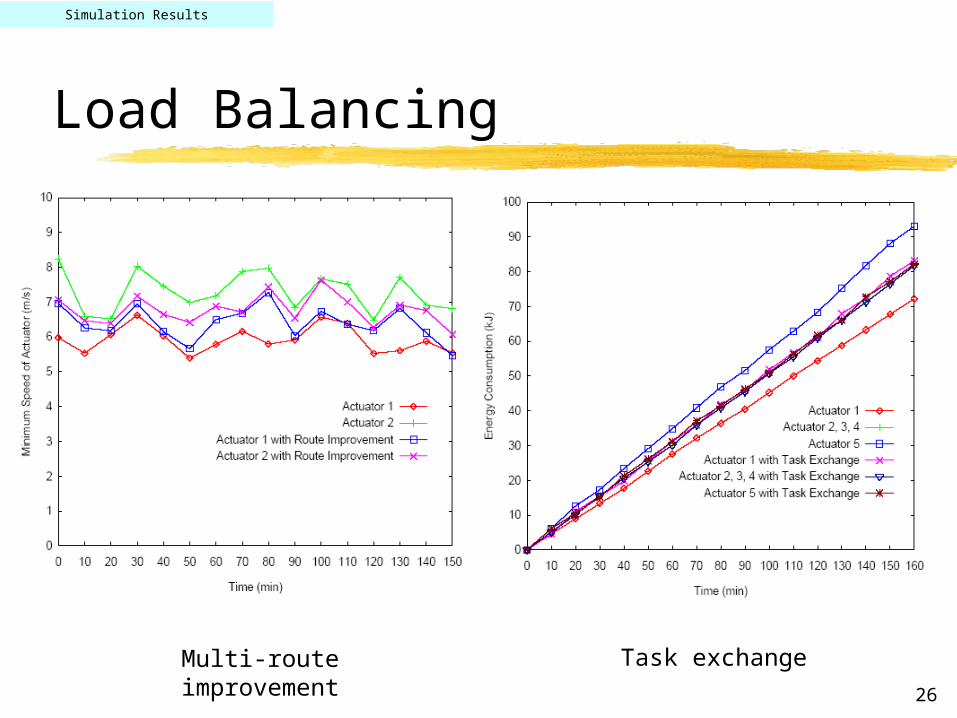
Load Balancing
• Multi-Route Improvement Algorithm
• Actuators on routes with similar expected length have more balanced energy consumption
• Consider two routes R1 and R2 involved in multi-route improvement
• Their new expected route lengths become ideal if E[R’1] = E[R’2] = (E[R1] + E[R2])/2
• We provide an approximation method to transfer a proportion of sensor locations ζ from MST1 to MST2
Enhancements
21
Load Balancing
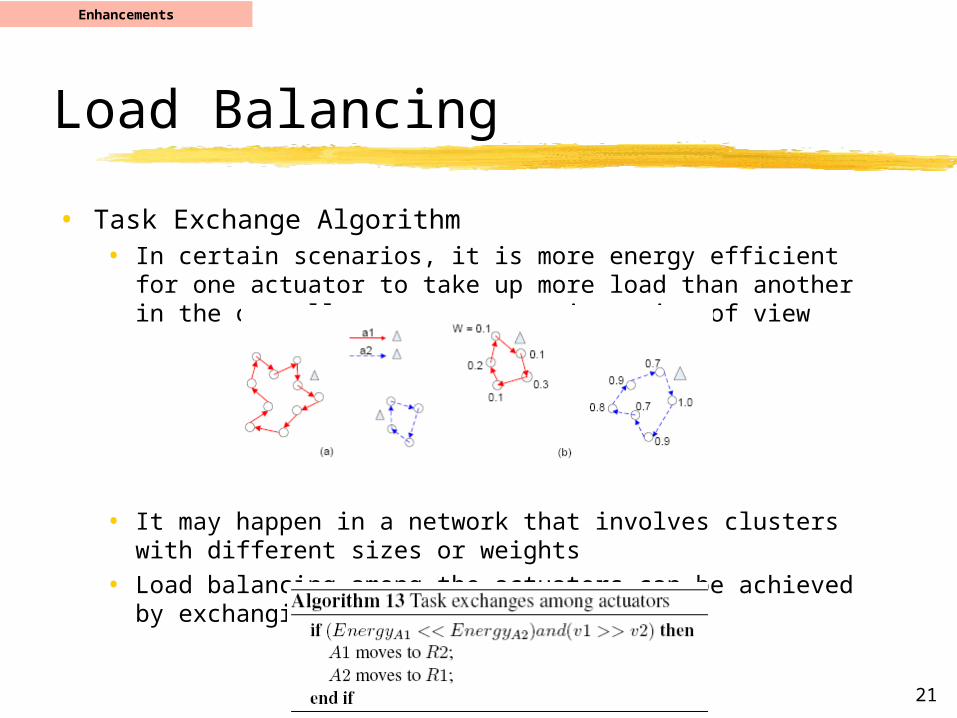
• Task Exchange Algorithm• In certain scenarios, it is more energy efficient for one actuator to take
up more load than another in the overall energy consumption point of view
• It may happen in a network that involves clusters with different sizes or weights
• Load balancing among the actuators can be achieved by exchanging their routes
Enhancements
22
Simulations
Simulations
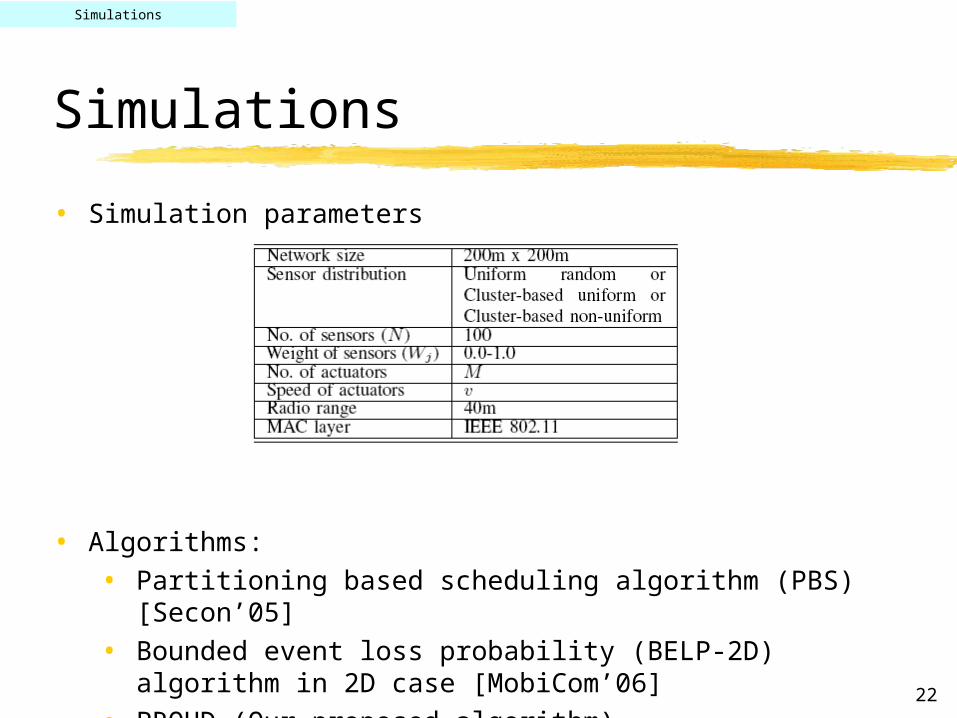
• Simulation parameters
• Algorithms:
• Partitioning based scheduling algorithm (PBS) [Secon’05]
• Bounded event loss probability (BELP-2D) algorithm in 2D case [MobiCom’06]
• PROUD (Our proposed algorithm)
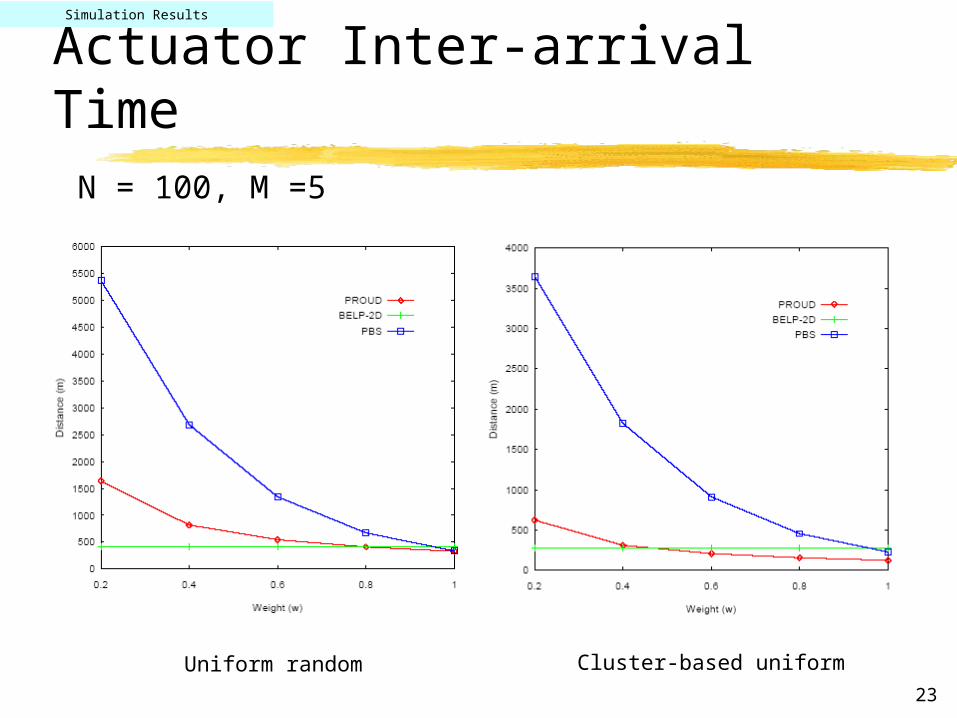
23
Actuator Inter-arrival Time
Uniform random Cluster-based uniform
N = 100, M =5
Simulation Results

24
Actuator Inter-arrival Time
Cluster-based non-uniform Eye Topology
Simulation Results
25
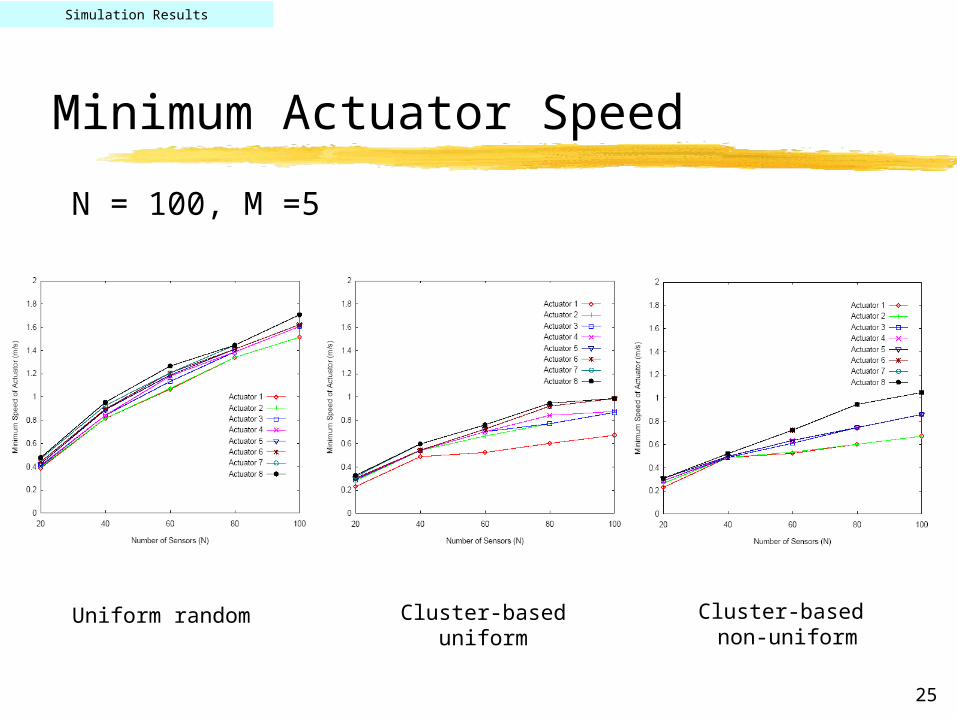
Minimum Actuator Speed
Uniform random Cluster-based uniform
N = 100, M =5
Simulation Results
Cluster-based non-uniform
26
Load Balancing
Multi-route improvement Task exchange
Simulation Results
27
Conclusion
• We focused on WSN with multiple actuators and their route design
• We studied the route design problem and proposed delay-minimized and cooperative solution to coordinate actuators and collect data efficiently
• We proposed an adaptive route design (PROUD) algorithm • It differentiates the visiting frequency to sensor locations with
different weights and balances the workload of actuators• The proposed algorithm adapts well to the dynamic change of
the network and balances the energy consumption of actuators effectively
• Simulation results suggested that the algorithm remarkably reduces the average inter-arrival time
Conclusion

28
Q & A
Thank You!