Embed Size (px)
Citation preview
![Page 1: [IEEE OCEANS 2006 - Boston, MA, USA (2006.09.18-2006.09.21)] OCEANS 2006 - Matched-field inversion in the East China Sea with Tabu Search](https://reader043.pdfslide.net/reader043/viewer/2022030215/5750a7721a28abcf0cc12278/html5/page/1.jpg)
Matched-field inversion in the East China Sea withTabu Search
(Invited Paper)
Zoi-Heleni MichalopoulouDepartment of Mathematical SciencesNew Jersey Institute of Technology
Newark, NJ 07102Email: [email protected]
Abstract- Tabu is a global optimization approach which gen-erates and exploits lists of already visited points to efficientlytraverse search spaces. A Tabu-based technique has been recentlydeveloped for source localization and geoacoustic inversion inocean environments; the method has been tested on syntheticand real data and is further validated in this work through asuccessful application to broadband data from the 2001 ASIAEXexperiment both for source localization and geoacoustic inversion.The success of the method is found to be intimately tied tothe exploitation of the sensitivity of the measured acoustic fieldto the unknown parameters. Eigenvalue decomposition of thecovariance matrix of the objective function gradient determineshow the search should be diversified for fast identification of theglobal maximum.
I. INTRODUCTION
Tabu is a global optimization technique utilizing memoryto facilitate exploration of a search space in a structuredmanner [1], [2], [3], [4]. With the generation and updating ofmemory lists, the search focuses on areas of high objectivefunction values (for maximization), avoiding search spaceregions where the global maximum is not likely to occur. ATabu search method has been recently developed for sourcelocalization and geoacoustic inversion [5]. The technique relieson three memory lists that determine moves in the search spacefor the maximization of a Bartlett correlation. One memorylist prohibits repeated visitations of the same regions of thesearch space; a second list prevents visitations to low objectivefunction regions (for maximization), and a third list servesas a look-up resouce for forward model computations. Themethod also employs a stochastic mechanism that prevents theprocess from getting trapped in local maxima. The approachwas applied to synthetic and real data with excellent results interms of both accuracy and efficiency. In particular, the processwas validated through application to simulated data from theinversion workshop in 1997 [6] and SWellEX-96 data [5].
In this work, acoustic data collected in the East ChinaSea during the ASIAEX experiment [7] were processed formatched field localization and environmental inversion withTabu. Different approaches have been previously applied to thesame data for source localization and characterization of theenvironment [8], [9], [10], [11]; results of those approachesform ground truth information to which we compare our
James H. Miller and Gopu R. PottyDepartment of Ocean Engineering
University of Rhode IslandNarragansett, RI 02882
2-3
CD,1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9(a) time (s)
(b) frequency (Hz)
Fig. 1. (a) Time series and (b) its Fourier transform corresponding to oneof the wideband sources.
estimates for performance evaluation of our method. SectionII of this paper provides a brief description of the experiment.Section III presents the parameterization of the environmentemployed for the inversion, the tabu methodology as appliedto this problem, and inversion results. Section IV summarizesthe work and presents conclusions.
II. THE EXPERIMENT
Data processed in this paper were collected in the EastChina Sea during the ASIAEX experiment in June 2001 [7],[12]. The environment in the area of interest was rangeindependent with a bottom depth of 105 m and a thin sedimentlayer. The sound speed profile in the water column wasextensively measured with CTDs; an average sound speedprofile was employed in this work. Wideband sources weredeployed at depths of approximately 50 m. Time series wererecorded at a vertical line array with 14 operational, equi-spaced hydrophones, the shallowest of which is located atan approximate depth of 34 m. The data were sampled ata rate of 2048 Hz; most of the power was between 15 and700 Hz. Figure l(a) presents a recorded time series at theshallowest phone for one of the sources and Figure 1(b) showsthe modulus of the Fourier transform of the time series.
1-4244-01 15-1/06/$20.00 §2006 IEEE
![Page 2: [IEEE OCEANS 2006 - Boston, MA, USA (2006.09.18-2006.09.21)] OCEANS 2006 - Matched-field inversion in the East China Sea with Tabu Search](https://reader043.pdfslide.net/reader043/viewer/2022030215/5750a7721a28abcf0cc12278/html5/page/2.jpg)
III. THE INVERSIONThe inversion was performed for the broadband data of
Figure 1, considering time series at all fourteen hydrophones.The data were Fourier-transformed (Figure l(b)) and frequen-cies corresponding to high power levels were identified. Theenvironment considered for the inversion is shown in Figure 2.Nine parameters were considered as unknowns: source rangers, source depth zs, water column depth D, vertical array shiftsh, array tilt b, sediment thickness H, compressional soundspeeds cl and c2 at the top and bottom of the sediment, andcompressional attenuation ag in the sediment. Sound speed andattenuation in the basement, Cb and ab, as well as densitieswere considered known. A broadband Bartlett correlation wasthe objective function that was maximized with Tabu:
Bbr (q) = 1 log(wf (q)df df wf (q)),f
RECEIVERS
001,
0
0
shift
0 (z)
SOURCE
(r, zs)
C1
C b
D
Oc b
Fig. 2. Sketch of the environment used for the inversion.
(1)
where q = [r, z, D sh H b cl C2 ]T, wf (q) is thenormalized solution of the Helmholtz equation for frequencyf and parameters q, and df is the data vector at frequency f.Aiming at the development of a single-stage process, we
identified a frequency region around 200 Hz as a reasonableregime for inverting for all nine parameters. Specifically, tenfrequencies were used roughly between 180 and 240 Hz; usingfewer frequencies resulted in volatile inversions with unstableresults between different runs.
Prior to employing Tabu for navigating the multidimensionalsurface of Equation 1, the covariance matrix of the gradientof the Bartlett correlation was computed using Monte Carlointegration [13]. An eigenvalue decomposition of the matrixreveals the sensitivity of the objective function to the unknownparameters as well as correlations among parameters. Thelogarithm of the normalized eignevalues vs. parameter areillustrated in Figure 3; parameters on the x-axis are rankedin terms of significance as r, z5, D, q, H, cl, a, sh, c2.As expected, the most significant parameter is the source rangefollowed by source depth and water column depth which arealmost equivalent in terms of level of significance. Array tilt,sediment thickness, sound speed at the top of the sediment,and sediment attenuation follow at comparable levels. Verticalarray shift is next with the sound speed at the bottom of thesediment being the least significant parameter. Eigenvectors(not shown here) reveal the well-established correlation be-tween source range and water column depth, source depthand water column depth, and also correlations between soundspeed at the top of the sediment, sedmient thickness, array tilt,vertical displacement of the array, and attenuation.
Establishing a parameter hierarchy is critical for the applica-tion of Tabu to inversion problems. As explained in [5], Tabumostly makes moves varying a single parameter at a time.When the method gets trapped in a local maximum, randomjumps are incurred where large neigborhoods are exploredcontaining "diagonal" parameter perturbations; that is, severalparameters can be perturbed simultanesously. Since Tabu is astructured method evaluating the objective function at all po-sitions within a neighborhood, "diagonal" moves can become
-0.5
-1 5
2-
-3
-3.5
2 3 4 5 6parameter #
7 8 9-4 l
Fig. 3. Eigenvalues of the gradient of the objective function vs. parameter.
cumbersome when the problem has many dimensions. For Nunknown parameters, a neigborhood during the jump processwould have 2N corners; these corners are the neigborhoodpoints that would be diagonally explored. Neighborhoods ofsuch size would stall the optimization process. In [5] it wasproposed to use "diagonal" moves considering only the threemost important paramaters for the inversion, importance beingdetermined by the eigenvalues of the covariance matrix ofthe gradient of the objective function. In [5], source range,source depth, and tilt were found to be the most significantparameters for the SWellEX 96 inversion and were included inthe random jumps. Here, the three most significant parametersare source range, source depth, and water depth, and aresimultaneously perturbed during jumps for escaping localmaxima and diversifying the search. Test cases were run wheredifferent parameter combinations were perturbed during jumps(for example, source range, source depth, and array tilt); thesechoices caused significant delays in the search.
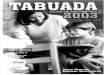
Results from ten tabu runs for source range, source depth,and water depth are shown in Figure 4 along with the expectedvalues of the three parameters. There appears to be a veryclose match between all estimates and the "true" values ofthe parameters. More volatile results are shown in Figures 5and 6, that show tabu estimates for tilt, shift, and sedimentthickness (Figure 5) and attenuation and sound speed at the
r A~~~~~~~~~~~~~~~~~~~~~~~~
![Page 3: [IEEE OCEANS 2006 - Boston, MA, USA (2006.09.18-2006.09.21)] OCEANS 2006 - Matched-field inversion in the East China Sea with Tabu Search](https://reader043.pdfslide.net/reader043/viewer/2022030215/5750a7721a28abcf0cc12278/html5/page/3.jpg)
~71 2 3 4 5 6 8 9 1 0
-54
L52I0D
481 2 3 4 5 6 8 9 10
12 A
E- 110
1o0o5 1 00
B6
1 2 3 4 5 6run #
8 9 10 2 3 6 7 8 9 10
Fig. 4. Range (top), source depth (middle), and water depth (bottom) results Fig. 6. Sediment attenuation (top), sound speed at the top (middle), andfor 10 tabu runs (lines with asterisks). The horizontal solid lines indicate the sound speed at the bottom (bottom) results for 10 tabu runs. The vertical"true" values of the parameters. The vertical solid line indicates the run for solid line indicates the run for which the maximum value of the objectivewhich the maximum value of the objective function was achieved. function was achieved.
I
=2
1 2 3 4 5 6 1 8 9 1 0
21
1 2 3 4 5 6
E <20
r 10
1 2 3 4
5 10
4.5
4
oT)3.5-0,3E 3-
-25o1 58 25
a1 1.5-8 9 10
5 6 7 8 9 1 0run #
0.5
1 2 3 4 5 6 7 8 9 10run #
Fig. 5. Tilt (top), array shift (middle), and sediment thickness (bottom)results for 10 tabu runs (lines with asterisks). The vertical solid line indicatesthe run for which the maximum value of the objective function was achieved.
top and bottom of the sediment (Figure 6). Tilt seems to beconsistently estimated at -3 degrees and array shift estimatesare mostly between -4 and -5 m. These values are consistentwith results presented in [9]. Sediment values vary. In [8] thetop sediment layer thickness is estimated at a value of 2.5 min the vicinity of the deployment of the source studied in thiswork. Tabu estimates obtained here vary mostly between 8 and11 m, resembling results obtained for the same region in [10].Attenuation is estimated at 0.15 dB/A, slightly lower than theestimate in [10]. The sound speed at the top of the sedimentis estimated to lie between 1580 and 1610 m/s (ground truthinformation speed in the region of the source deployment isreported to be 1650 m/s); our results are again consistent withresults reported in [10] and [11]. Estimates of sound speed atthe bottom of the sediment are low. The latter six parameters(especially sound speed at the bottom of the sediment) donot affect the objective function significantly as shown bythe eigenvalue decomposition of Figure 3, explaining thediscrepancy between results from different inversion methodsand the high variability.
Figure 7 shows the number of forward model calculationsrequired to reach the objective function maximum for each
Fig. 7. Number of forward models required for reaching the maximum foreach Tabu run (line with asterisks); the solid line shows the mean number ofmodels over all ten runs (20,917).
Tabu run. The mean number of forward model calculations is20,917. This requirement is not computationally onerous fora nine-dimensional problem, showing that Tabu searches theparameter space in an efficient manner as also shown in [5].
Figure 8 demonstrates a source range-depth Bartlett surface(Equation 1) calculated for a nominal environment descriptiveof the site and zero tilt and array shift. The true source rangeand depth are 7.72 km and 50 m; the arrow in the figure showsthe source range and depth values that maximize the ambiguitysurface which are 11.5 km and 70 m, respectively, far from thetrue values. Figure 9 shows the ambiguity surface calculatedin the same manner but using the optimized environmentobtained with estimates from the seventh (best) Tabu run. Thearrow points to the source range and depth estimates, whichare 7.78 km and 50 m, practically identical to the true sourcerange and depth.
IV. CONCLUSION
Tabu optimization was applied to multi-dimensionalmatched-field inversion with East China Sea data col-lected during the 2001 ASIAEX experiment. The estimation-optimization process produced estimates that are very close
90 , \ -
A
.n,
I
0
-E-2'F -4,,---'
-6
![Page 4: [IEEE OCEANS 2006 - Boston, MA, USA (2006.09.18-2006.09.21)] OCEANS 2006 - Matched-field inversion in the East China Sea with Tabu Search](https://reader043.pdfslide.net/reader043/viewer/2022030215/5750a7721a28abcf0cc12278/html5/page/4.jpg)
Q~
C)E
a)-
4 5 6 7 8 91r01g1 1(2source range (km)
Fig. 8. Source range-depth ambiguity surface for a nominal environment.
40
-a 50
a 600In
[4] D. T. Pham and D. Karaboga, Intelligent Optimisation Techniques.Springer, 2000.
[5] Z.-H. Michalopoulou and U. Ghosh-Dastidar, "Tabu for matched-fieldsource localization and geoacoustic inversion," J. Acoust. Soc. Am.,vol. 115, pp. 135-145, 2004.
[6] Z.-H. Michalopoulou, "Optimizing matched-field inversion using tabusearch," in Proceedings of the 7th Conference on Underwater Acoustics,vol. 2, pp. 653-658, 2004.
[7] P. Dahl, "ASIAEX, East China Sea cruise report of the activities of theRN Melville 29 May to 9 June 2001," Tech. Rep. APL-UW TM 7-01,2001.
[8] J. H. Miller, L. R. Bartek, G. R. Potty, D. Tang, J. Na, and Y. Qi, "Sed-iments in the East China Sea," IEEE Journal of Oceanic Engineering,vol. 29, no. 4, pp. 940-951, 2004.
[9] K. Yang, Y. Ma, C. Sun, J. H. Miller, and G. R. Potty, "Multistepmatched-field inversion from broad-band data from ASIAEX2001,"IEEE Journal of Oceanic Engineering, vol. 29, no. 4, pp. 964-972,2004.
[10] C.-F. Huang and W. S. Hodgkiss, "Matched-field geoacoustic inversionof low frequency source tow data form the ASIAEX East China Seaexperiment," IEEE Journal of Oceanic Engineering, vol. 29, no. 4,pp. 952-963, 2004.
[11] D. P. Knobles, T. W. Yudichak, R. A. Koch, P. G. Cable, J. H. Miller,and G. R. Potty, "Inferences on seabed acoustics in the East ChinaSea from distributed acoustic measurements," IEEE Journal of OceanicEngineering, vol. 31, no. 1, pp. 129-144, 2006.
[12] P. H. Dahl, R. Zhang, J. H. Miller, L. R. Bartek, Z. Peng, S. R. Ramp,J.-X. Zhou, C.-S. Chiu, J. F. Lynch, J. A. Simmen, and R. C. Spindel,"Overview of results from the Asian Seas international acoustics exper-iment in the East China Sea," IEEE Journal of Oceanic Engineering,vol. 29, no. 4, pp. 920-928, 2004.
[13] T. Neilsen, "An iterative implementation of rotated coordinates forinverse problems," J. Acoust. Soc. Am., vol. 113, pp. 2574-2586, 2003.
source range (km)
Fig. 9. Source range-depth ambiguity surface for the optimal environmentobtained with Tabu.
to ground-truth information on the unknown source locationparameters. Environmental parameter estimates were variable,because of the reduced influence of the parameters on the field,but were mostly consistent with results from other inversionefforts. The inversion was also efficient, requiring few forwardmodel calculations. It was of particular interest to study theperformance of the Tabu optimization approach as a functionof the order in which parameters were inverted for; this orderseemed to be a critical factor for achieving fast identification ofthe global maximum. Order is, as expected, tightly correlatedto the sensitivity of the objective function with respect to theunknown parameters.
ACKNOWLEDGMENT
This work was supported by the Office of Naval Researchthrough grant number N00014-05-1-0262. The authors are
grateful to the NSF DMS-MRI program for computing sup-port.
REFERENCES
[1] F. Glover, E. Taillard, and D. de Werra, "A user's guide to tabu search,"Annals of operations research, vol. 41, pp. 3-28, 1993.
[2] F. Glover and M. Laguna, TABU Search. Kluwer Academic Publishers,1997.
[3] R. Vinther and K. Mosegaard, "Seismic inversion through tabu search,"Geophysical Prospecting, vol. 44, pp. 555-570, 1996.
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
1 0.9
0.6
- 0.5
. 0.4
0.3
0.2
0.1