Embed Size (px)
Citation preview

Mathmatical Models on Extended Electromotive ForceExited by High Frequency Signal Injection
and Its Robustness for Position Estimation of PMSMShota Kondo and Shinji DokiDepartment of Information and
Communication EngineeringNagoya University
Furo-cho, Chikusa-ku,NagoyaAichi Japan
Email: [email protected]@nagoya-u.jp
Mutuwo TomitaDepartment of Electrical and
Computer EngineeringNational Institute of Technology, Gifu College
2236-2, Kamimakuwa, Motosu-shiGifu Japan
Email: [email protected]
Abstract—The Extended Electromotive Force(EEMF) has ahigh potential because that the model enables position estimationby utilizing not only electromotive force but also saliency ofinductance. In particular, the EEMF consists of two components,excited by rotor speed and high-frequency signal injection. Thecharacteristic of EEMF excited by speed has been proposed suffi-ciently. This paper describes analysis of robustness of parametererror in two types of Extended Electromotive Force (EEMF)exited by high frequency signal injection for position sensorlesscontrol. Finally, formula evaluation indicates that each EEMFmodel has different robustness of parameter error.
I. INTRODUCTION
Recently, Permanent Magnet Synchronous Motor (PMSM)is applied to various fields such as electric appliance, industry,electric vehicles, hybrid electric vehicles and so on, because ofits high power density and high efficiency. In order to ensurevector control of PMSM, the rotor position information mustbe detected by some way. However, the position sensor hasproblems of the cost, space, and a risk of cable disconnection,etc.[1][2]. Hence, various position sensorless control methodsof PMSM have been proposed[3][4][5].
Estimating Extended Electromotive Force (EEMF) exists asa representative method used for position sensorless controlof PMSM in middle/high speed range. The EEMF has ahigh potential because that the model enables position es-timation by utilizing not only electromotive force but alsosaliency of inductance[6]. In particular, the EEMF consists oftwo components, excited by rotor speed and high frequency(HF) signal injection[7]. This property of EEMF is useful instandstill/low speed range, though it has been reported thatmachine parameters are required for estimating EEMF[8].
On the other hand, it is possible to express EEMF differentlydepending on the mathematical expressions, and two types ofEEMF models are proposed. As stated above, two types ofEEMF models have the EEMF component excited by rotorspeed and HF signal injection.
Literature [9] showed the two models have same robustnessagainst parameter error in the case that only components
excited by rotor speed exist in steady state. However, the effectof the parameter error in the EEMF which is excited by thehigh frequency signal injection in two types of EEMF modelshas not been reported sufficiently[10][11].
This paper indicates the analysis of robustness between twotypes of EEMF models and the sensitivity function of theparameter error of R,Ld, and Lq of the EEMF estimationmethod due to the HF signal injection on both models. Finally,we describe that robustness of parameter error in two types ofEEMF has different characteristics by formula evaluation.
II. TWO TYPES OF EEMF MODELS AND PRINCIPLE OFPOSITION ESTIMATION
The circuit equation of PMSM on the d − q rotatingcoordinate is given below.[
vdvq
]=
[R+ pLd −ωreLq
ωreLd R+ pLq
] [idiq
]+
[0
ωreKE
](1)
R,Ld, Lq, ωre,KE , p represent stator resistance, d−axis in-ductance, q−axis inductance, electrical angular velocity anddifferential operator respectively.
EEMFq model and EEMFd model on the stator frame(α−β) coordinate is expressed by equation (2),(3),(4) and (5)respectively.
EEMFq :
v = (R+ pLd)I − ωre(Ld − Lq)Ji+ e
(2)
e = ωreKE + (Ld − Lq)idJeJθreu︸ ︷︷ ︸EEMFq−ωre
− (Ld − Lq)iqJeJθreu︸ ︷︷ ︸
EEMFq−h
(3)
978-1-5090-2364-6/17/$31.00 ©2017 IEEE
IEEE PEDS 2017, Honolulu, USA12 – 15 December 2017
172

NS
Fig. 1: Vector of high frequency signal injection
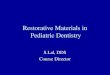
Inv
BPF
Position
Estimator
BPF
++
Current
Controller
PMSM
Signal
Processing
Fig. 2: Current control system of IPMSM
———————————————————————-
EEMFd :
v = (R+ pLq)Ii+ e (4)
e = ωreKE + (Ld − Lq)idJeJθreu︸ ︷︷ ︸EEMFd−ωre
+ (Ld − Lq)ideJθreu︸ ︷︷ ︸
EEMFd−h
(5)
I =
[1 00 1
],J =
[0 −11 0
](6)
eJθre =
[cos θre − sin θresin θre cos θre
](7)
I,J , eJθre ,u represent unit matrix, alternating matrix, ro-tating matrix and d-axis unit matrix respectively. iq, id andθre are represent time derivation by iq, id and the electricalangular position. In this paper, EEMFq−ωre and EEMFq−h
in EEMFq are defined as the EEMF excited by rotor speedand HF signal injection in eq.(3) respectively. Similarly,EEMFd−ωre and EEMFd−h in EEMFd are defined as theEEMF excited by rotor speed and HF signal injection in eq.(5)
Fig. 3: Position Estimation System by EEMF q−h
Fig. 4: Position Estimation System by EEMF d−h
respectively. It is clear that the difference between EEMFq
model and EEMFd model is the component of EEMF exitedby HF signal injection. EEMFq−h faces the direction of q-axis by iq . Whereas, EEMFd−h faces the direction of d-axisby id.
A. EEMF Estimation Method on Two Types of EEMF excitedby HF Signal Injection
In this section, we describe a method to estimate the EEMFexcited by HF signal injection eh. First, HF signal is injectedon the phase which advance φ in angle from d-axis and alinear injection method as a HF signal is assumed as shownin fig.1. The HF current is shown in eq.(8).
idqh = (ih sinωht)eJφ (8)
eJφ =
[cosφ − sinφsinφ cosφ
](9)
where, ih and wh express the current amplitude of HF signaland the angular frequency of HF signal. Eq.(10)-(12), andeq.(15)-(16) are given from eq.(2)-(5) by extracting only theinjected HF signal of voltage and current via using BandpassFilter (BPF) for position estimation in fig.2.
173

EEMFqh :
vh = (R+ pLd)I − ωre(Ld − Lq)Jih + eh
(10)
eh = −(Ld − Lq)iqhJeJθreu (11)
= −(Ld − Lq)ωhih cosωht sinφJeJθreu
(12)
eh ∗ cosωht
=−(Ld − Lq)ωhih sinφ(1 + cos 2ωht)
2JeJθreu (13)
eh =−(Ld − Lq)ωhih sinφ
2JeJθreu (14)
———————————————————————-
EEMFdh:
vh = (R+ pLq)Iih + eh (15)
eh = (Ld − Lq)idheJθreu (16)
= (Ld − Lq)ωhih cosωht cosφeJθreu (17)
eh ∗ cosωht
=(Ld − Lq)ωhih cosφ(1 + cos 2ωht)
2eJθreu (18)
eh =−(Ld − Lq)ωhih cosφ
2JeJθreu (19)
EEMF exited by HF signal injection eh in eq.(12) and (17)are estimated by the system of fig.3 and 4. It is necessary toextract the rotor position information by detection processingfrom eq.(12) and (17), because eq.(12) and (17) are themodulated signal with rotation frequency on the carrier wave,HF signal. Thus, eq.(12) and (17) are processed with theheterodyne detection as it is shown in figs.3, 4 and eq.(13)-(14)and eq.(18)-(19), and the rotor position can be estimated bythe phase information of eh as shown in eq.(14) and eq.(19),respectively. Fig.5 and 6 show the estimated phase of eh,respectively. Note that eh vector in EEMFd model is rotatedto point in q-axis direction in heterodyne detection, becauseeh vector faces the direction of d-axis in EEMFd model.
B. Influence of Parameter Error
In this chapter, we describe the influence of parameter errorin the method below. Stator resistance R, d-axis inductanceLd, and q-axis inductance Lq of plant change from the nominalvalue R, Ld, and Lq to the R = R + ∆R,Ld = Ld + ∆Ld,and Lq = Lq +∆Lq . Here ∆R,∆Ld, and ∆Lq are amountsof variation on each parameter. The EEMF error vector ∆ehis given as eq.(24) and (30), which are calculated in fig.3, 4.The derivation process for ∆eh is shown as eq.(20)-(23) andeq.(26)-(29).
EEMFqh :
NS
Fig. 5: Estimated Phase of EEMFq
NS
Fig. 6: Estimated Phase of EEMFd
∆eh = ∆eR +∆eLd +∆eLq (20)∆eR = (ih∆R sinωht)Ie
JθeJφ
∆eLd= (−2ωreih∆Ld sinωht)Je
JθeJφ
+(ωhih∆Ld cosωht)IeJθeJφ
∆eLq = (ωreih∆Lq sinωht)JeJθeJφ
(21)
∆eh ∗ cosωht = (∆eR +∆eLd +∆eLq ) ∗ cosωht (22)∆eR ∗ cosωht =
ih∆R sin 2ωht2 IeJθeJφ
∆eLd ∗ cosωht =−2ωreih∆Ld sin 2ωht
2 JeJθeJφ
+ωhih∆Ld(1+cos 2ωht)2 IeJθeJφ
∆eLq ∗ cosωht =ωreih∆Lq sin 2ωht
2 JeJθeJφ
(23)
∆eh = ∆eR +∆eLd+∆eLq
(24)∆eR = 0
∆eLd = ωhih∆Ld
2 IeJθeJφ
∆eLq= 0
(25)
———————————————————————-
EEMFdh :
∆eh = ∆eR +∆eLd +∆eLq (26)∆eR = (ih∆R sinωht)Ie
JθeJφ
∆eLd = 0
∆eLq = (ωhih∆Lq cosωht)IeJθeJφ
+(ωreih∆Lq sinωht)JeJθeJφ
(27)
∆eh ∗ cosωht = (∆eR +∆eLd +∆eLq ) ∗ cosωht (28)
174

Fig. 7: Error vector by parameter error(EEMFq)
Fig. 8: Error vector by parameter error(EEMFd)
∆eR ∗ cosωht =
ih∆R sin 2ωht2 IeJθeJφ
∆eLd ∗ cosωht = 0
∆eLq ∗ cosωht =ωhih∆Lq(1+cos 2ωht)
2 IeJθeJφ
+ωreih∆Lq sin 2ωht
2 JeJθeJφ
(29)
∆eh = ∆eR +∆eLd +∆eLq (30)∆eR = 0∆eLd = 0
∆eLq = −ωhih∆Lq
2 JeJθeJφ
(31)
It turns out that the EEMFq−h is affected only by ∆Ld
from eq.(24),(25), and EEMFd−h is affected only by ∆Lq
from eq.(30),(31). Moreover, EEMFq−h faces in the samedirection to the phase of HF signal injection as shown in fig.7.The influence on position estimation in EEMFq model isminimized by injecting the HF signal near phase that φ = π
2
Table1: Parameters of IPMSM
d-axis inductance Ld 4.15m [H]q-axis inductance Lq 16.74m [H]EMF constant KE 0.091 [V・s/rad]
winding resistance R 1.08 [Ω]pole pairs Pn 2rated torque T 1.2[Nm]
rated speed ωrm 2500[rpm]
Table2: Setting condition of controller
Current limit Imax 5[A]High-frequency signal ih, ωh 1[A],2π100 [rad/s]
Driving frequency ωre 5 [rad/s]Current control period Tcc 100[µs]
(q-axis direction). On the other hand, EEMFd−h faces inthe orthogonal direction to the phase of HF signal injectionas shown in fig.8. The influence on position estimation inEEMFq model is minimized by injecting the HF signal nearphase that φ = 0 (d-axis direction).
III. VALIDATION BY SIMULATION AND CONSIDERATION
The influence of parameter error in the previous section isexamined by simulation. Table.1 and 2 show the conditions ofPMSM parameter and controller. The position estimator settingis an error of nominal value 100% under the assumption thatrising temperature and magnetic saturation(∆R > 0,∆Lq <0). The phase of the HF signal injection is set to q-axisdirection in EEMFq model and is set to d-axis directionin EEMFd model. Figs.9(a), 10(a) show the error vectoreh after the detection processing, fig.9(b), 10(b) show theestimated position ,estimated position error, and torque underthe condition of actual parameter and without any parameter inEEMFq and EEMFd models, respectively. In fig.9(a), it canbe confirmed that EEMFq−h has almost no sensitivity to ∆Rand ∆Lq , and has a constant sensitivity to ∆Ld. Also, ∆eLd
vector is generated in the q-axis direction to the same directionof the HF signal injection vector. The position estimationerror is almost 0 in fig.9(b), and the influence on ∆Ld isminimized by injecting the HF signal in the phase that is nearthe q-axis direction. The torque ripple due to signal injectionoccurred 17% of rated value in fig.9(b). On the other hand, infig.10(a), it can be confirmed that EEMFd−h has almost nosensitivity to ∆R and ∆Ld, and has a constant sensitivity to∆Lq . Also, ∆eLq vector is generated in the q-axis directionto the orthogonal direction of the HF signal injection vector.The position estimation error is almost 0 in fig.10(b), and theinfluence on ∆Lq is minimized by injecting the HF signal inthe phase that is near the d-axis direction. The torque rippledue to signal injection is almost 0 in fig.10(b).
Regarding the torque ripple in figs.9(b), 10(b), the EEMFd
model is smaller than EEMFq model because the phase of
175

-2 -1 0 1 2 e
d[V]
-2
-1
0
1
2 e
q[V
]
ih
eLd
eRe
Lq
Fig. 9(a): Simulation results of EEMFq model
0.5 0.6 0.7 0.8 0.9 1time[s]
-5
0
5
po
sitio
n[r
ad
]
estimated position(actual)estimated position(100%error)
0.5 0.6 0.7 0.8 0.9 1time[s]
-5
0
5
po
sitio
n e
rro
r[d
eg
]
0.5 0.6 0.7 0.8 0.9 1time[s]
-1
0
1
torq
ue
[Nm
]
Fig. 9(b): Estimated position, estimated position error andtorque(EEMFq)
injecting the HF signal in EEMFd model is near the d-axisdirection.
Table3. shows the summary of EEMF estimation error byparameter error in this paper, and two points about EEMFq
and EEMFd models are below.
• EEMFqmodel: EEMFq−h is robust against ∆R,∆Lq ,and is affected only by ∆Ld. Moreover, the influenceon position estimation is minimized by injecting the HFsignal near the φ = π
2 (q-axis direction).• EEMFdmodel: EEMFd−h is robust against ∆R,∆Ld,
and is affected only by ∆Lq . Moreover, the influenceon position estimation is minimized by injecting the HF
-2 -1 0 1 2
ed[V]
-6
-4
-2
0
2
4
6
eq[V
] ih
eLq
eR
Fig. 10(a): Simulation results of EEMFd model
0.5 0.6 0.7 0.8 0.9 1time[s]
-5
0
5
positio
n[r
ad]
estimated position(actual)estimated position(100% error)
0.5 0.6 0.7 0.8 0.9 1time[s]
-5
0
5
positio
n e
rror[
deg]
0.5 0.6 0.7 0.8 0.9 1time[s]
-1
0
1
torq
ue[N
m]
Fig. 10(b): Estimated position, estimated position error andtorque(EEMFd)
signal near the φ = 0 (d-axis direction).
IV. CONCLUSION
This paper revealed the influence of parameter error for twotypes of EEMF which is excited by HF signal injection. More-over, this paper discussed analysis of robustness of parametererror in two types of EEMF for position sensorless control. Fi-nally, formula evaluation indicates that robustness of parametererror in two types of EEMF has different characteristics.
REFERENCES
[1] Sadayuki Sato, Kozo Ide : Application Trends of Sensorless AC MotorDrives in Europe, IEEJ Journal of Industry Applications Vol. 3 (2014)No. 2 p. 97-103
176

Table. 3: Estimated EEMF error by parameter error
[2] Masaru Hasegawa, Shinji Doki : Trends in Motor Drive Techniquesin Japan -Controls for Synchronous Motors with Non-linearity-, IEEJTrans. Industrial Electronics, IEEJ Journal of Industry Applications Vol.1 (2012) No. 3 p. 123-131
[3] Yosuke Nakayama, Atsushi Matsumoto, Masaru Hasegawa : PositionSensorless Control System within Over-modulation Range Based onMathematical Model Robust against Magnetic Saturation of IPMSMs,IEEJ Journal of Industry Applications Vol. 6 (2017) No. 1 p. 36-45
[4] Ryota Takahashi, Kiyoshi Ohishi, Yuki Yokokura, Hitoshi Haga, Ten-jiroh Hiwatari : Stationary Reference Frame Position Sensorless ControlBased on Stator Flux Linkage and Sinusoidal Current Tracking Con-troller for IPMSM, IEEJ Journal of Industry Applications Vol. 6 (2017)No. 3 p. 181-191
[5] Kosuke Kondo, Shinji Doki : Position Estimation System for PMSMPosition Sensorless Control in Inverter Overmodulation Drive, IEEJJournal of Industry Applications Vol. 6 (2017) No. 3 p. 165-172
[6] Z.Chen, M.Tomita, S.Doki, and S.Okuma : An Extended ElectromotiveForce Model for Sensorless Control of Interior Permanent MagnetSynchronous Motors, IEEE Trans. Industrial Electronics, Vol.50, No.2,pp.288-295(2003)
[7] T.Ohnuma, S.Doki, and S.Okuma : Extended EMF Observer for Sen-sorless Control over a Wide Range of Speeds, IEEJ Trans. IndustrialElectronics, Vol.131, No.2, pp. 208-218(2011)
[8] Shinji Ichikawa, Mutuwo Tomita, Shinji Doki, Shigeru Okuma : Sensor-less Control of Synchronous Reluctance Motors based on an ExtendedElectromotive Force Model and Inductance Measurement in the Model,IEEJ Transactions on Industry Applications Vol. 125 (2005) No. 1 P16-25
[9] R.Saitoh, Y.Makaino, and T.Ohnuma : Adaptive Signal Injection MethodCombined with EEMF-based Position Sensorless Control of IPMSMDrives, IEEJ Journal of Industry Applications, Vol.4, No.4, pp. 454-459(2014)
[10] S.Kondo, S.Doki, M.Tomita : A study of effects of parameter error forposition sensorless control estimating Extended Electromotive Force ofPMSM based on injected high frequency signal, Annual Meeting record,SPC-16-172, HCA-16-069, VT-16-039, pp.29-34
[11] S.Kondo, S.Doki, M.Tomita : study of effects of parameter error forposition sensorless control estimating Extended Electromotive Force ofPMSM based on injected high frequency signal, Proc. of the 2017 JIASConf., [4-146], Vol.4, pp.250-251
177





![New Years Poster [Peds] 8 - FFF Enterprises · Title: New Years Poster [Peds] 8.5x11 Subject: New Years Poster [Peds] 8.5x11 Keywords: New Years Poster [Peds] 8.5x11 Created Date:](https://img.pdfslide.net/doc/110x75/5fd6db4c8a000945d6684aca/new-years-poster-peds-8-fff-title-new-years-poster-peds-85x11-subject-new.jpg)