Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 31, NO. 4, JULY 2016 2809
Photovoltaic Inverter Controllers SeekingAC Optimal Power Flow Solutions
Emiliano Dall’Anese, Member, IEEE, Sairaj V. Dhople, Member, IEEE, and Georgios B. Giannakis, Fellow, IEEE
Abstract—This paper considers future distribution networksfeaturing inverter-interfaced photovoltaic (PV) systems, andaddresses the synthesis of feedback controllers that seek real- andreactive-power inverter setpoints corresponding to AC optimalpower flow (OPF) solutions. The objective is to bridge the tem-poral gap between long-term system optimization and real-timeinverter control, and enable seamless PV-owner participationwithout compromising system efficiency and stability. The designof the controllers is grounded on a dual -subgradient method,while semidefinite programming relaxations are advocated tobypass the non-convexity of AC OPF formulations. Global con-vergence of inverter output powers is analytically established fordiminishing stepsize rules for cases where: i) computational limitsdictate asynchronous updates of the controller signals, and ii)inverter reference inputs may be updated at a faster rate than thepower-output settling time.Index Terms—Distributed optimization and control, distribution
systems, optimal power flow, photovoltaic inverter control.
I. INTRODUCTION
P RESENT-GENERATION residential photovoltaic (PV)inverters typically operate in a distributed and uncoor-
dinated fashion, with the primary objective of maximizingthe power extracted from PV arrays. With the increased de-ployment of behind-the-meter PV systems, an upgrade ofmedium- and low-voltage distribution-system operations andcontrols is required to address emerging efficiency, reliability,and power-quality concerns [1], [2]. To this end, several ar-chitectural frameworks have been proposed for PV-dominantdistribution systems to broaden the objectives of inverterreal-time control, and enable inverters to partake in distribu-tion-network optimization tasks [3]–[6].Past works have addressed the design of distributed real-time
inverter-control strategies to regulate the delivery of real andreactive power based on local measurements, so that terminal
Manuscript received December 31, 2014; revised April 24, 2015 and June 30,2015; accepted July 02, 2015. Date of publication September 21, 2015; date ofcurrent version May 02, 2016. The work of E. Dall’Anese was supported in partby the Laboratory Directed Research and Development Program at the NationalRenewable Energy Laboratory, and in part by the Department of Energy Officeof Electricity (OE) agreement 28676. The work of S. V. Dhople and G. B. Gian-nakis was supported in part by the National Science Foundation through grantsCCF 1423316, CyberSEES 1442686, and CAREER award ECCS-1453921 andin part by the Institute of Renewable Energy and the Environment, Universityof Minnesota under grant RL-0010-13. Paper no. TPWRS-01758-2014.E. Dall’Anese is with the National Renewable Energy Laboratory, Golden,
CO 80401 USA (e-mail: [email protected]).S. V. Dhople and G. B. Giannakis are with the Department of Electrical
and Computer Engineering, and the Digital Technology Center, Universityof Minnesota, Minneapolis, MN 55455 USA (e-mail: [email protected];[email protected]).Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.Digital Object Identifier 10.1109/TPWRS.2015.2454856
voltages are within acceptable levels [3], [4]. On a different timescale, centralized and distributed optimal power flow (OPF) al-gorithms have been proposed to compute optimal steady-stateinverter setpoints, so that power losses and voltage deviationsare minimized and economic benefits to end-users providing an-cillary services are maximized [5], [7]–[11].In an effort to bridge the temporal gap between real-time
control and network-wide steady-state optimization, this paperaddresses the synthesis of feedback controllers that seek op-timal PV-inverter power setpoints corresponding to AC OPFsolutions. The guiding motivation is to ensure that PV-systemoperation and control strategies are adaptable to changingambient conditions and loads, and enable seamless end-userparticipation without compromising system efficiency. Theproposed feedback controllers continuously pursue solutionsof the formulated OPF problem by dynamically updatingthe setpoints based on current system outputs and problemparameters. This presents significant improvements overstate-of-the-art distributed OPF approaches wherein referencesignals for the inverters are updated only upon convergenceof the distributed algorithm. In this setting, it is evident that ifproblem parameters or inputs change during the computation,broadcast, and implementation of the distributed solution of theOPF, the inverter would implement outdated setpoints.Prior efforts in this direction include continuous-time feed-
back controllers that seek Karush-Kuhn-Tucker conditions foroptimality developed in [12], and applied to solve an economicdispatch problem for bulk power systems in [13]. Recently,modified automatic generation and frequency control methodsthat incorporate optimization objectives corresponding to DCOPF problems have been proposed for lossless bulk power sys-tems in, e.g., [14]–[16]. A heuristic based on saddle-point-flowmethods is utilized in [17] to synthesize controllers seeking ACOPF solutions. Strategies that integrate economic optimizationwithin droop control for islanded lossless microgrids are devel-oped in [18]. In a nutshell, these approaches are close in spiritto the seminal work [19], where dynamical systems that serveas proxies for optimization variables and multipliers are syn-thesized to evolve in a continuous-time gradient-like fashionto the saddle points of the Lagrangian function associatedwith a convex optimization problem. For DC OPF, a heuristiccomprising continuous-time dual ascent and discrete-time ref-erence-signal updates is proposed in [20],where local stabilityof the resultant closed-loop system is also established.Distinct from past efforts [13]–[18], [20], this work leverages
dual -subgradient methods [21], [22], to develop a feedbackcontroller that steers the inverter output powers towards the so-lution of an AC OPF problem. A semidefinite programming(SDP) relaxation is advocated to bypass the non-convexity ofthe formulated AC OPF problem [10], [23], [24]. The proposedscheme involves the update of dual and primal variables in a
0885-8950 © 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.

2810 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 31, NO. 4, JULY 2016
discrete-time fashion, with the latter constituting the reference-input signals for the PV inverters. Convergence of PV-inverter-output powers to the solution of the formulated OPF problemis analytically established for settings where: 1) in an effort tobridge the time-scale separation between optimization and con-trol, the reference inputs may be updated at a faster rate thanthe power-output settling time; and 2) due to inherent computa-tional limits related to existing SDP solvers, the controller sig-nals are updated asynchronously. Although the present paper fo-cuses on the case where an SDP relaxation is utilized to bypassthe non-convexity of OPF tasks, the proposed synthesis proce-dure can be utilized to develop controllers that provably drivethe inverter output to solutions of various convex relaxations[25] and linear approximations [26]–[28] of the OPF problem.Overall, the proposed framework considerably broadens
the approaches of [13]–[18], [20] by: 1) considering AC OPFsetups; 2) incorporating PV-inverter operational constraints;3) accounting for communication constraints which naturallylead to discrete-time controller updates; and 4) accounting forcomputational limits which involves an asynchronous update ofthe controller signals. It is also shown that the controller affordsa distributed implementation, and requires limited messagepassing between the PV systems and the utility.The remainder of this paper is organized as follows.
Section II outlines the problem formulation, while the PVcontroller is developed in Section III. Section IV elaborateson the distributed implementation of the proposed controlarchitecture. Numerical tests are reported in Section V, andconclusions are provided in Section VI.
II. PROBLEM FORMULATION
Dynamical models and relevant formulations for optimizinginverter setpoints are outlined for a general networked dynam-ical system in Section II-A, and tailored to real-time PV-invertercontrol in Section II-B.1
A. General Problem SetupConsider dynamical systems described by
(1a)(1b)
where is the state of the th dynamical system attime ; is the measurement of stateat time ; is the reference input; and
is the exogenous input. Finally,and are arbitrary
1Notation. Upper-case (lower-case) boldface letters will be used for matrices(column vectors); for transposition; complex-conjugate; andcomplex-conjugate transposition; and denote the real and imagi-nary parts of a complex number, respectively; . the matrixtrace; the matrix rank; denotes the magnitude of a number or thecardinality of a set; returns a vector stacking the columns of matrix, and forms a block-diagonal matrix. and denote
the spaces of real-valued and complex-valued vectors, respectively;the set of natural numbers; and denotes the space of positivesemidefinite Hermitian matrices. Given vector and square matrix ,denotes the Euclidean norm of , and the (induced) spectral norm ofmatrix . points to the th element of a vector (vector-valuedfunction ). is the time derivative of . Given a scalar function
, returns the gradient . Fora continuous function , denotes its value sampled at . Finally,denotes the identity matrix; and , the matriceswith all zeroes and ones, respectively.
(non)linear functions. The following system behavior for givenfinite exogenous inputs and reference signals is assumed.Assumption 1: For given constant exogenous inputs
and reference signals , thereexist equilibrium points for (1) that satisfy
(2a)(2b)
Notice that in (2b), the equilibrium output coincides with thecommanded input ; that is, . These equilibrium pointsare locally asymptotically stable [29].For given exogenous inputs , consider the
following optimization problem:
(3a)
(3b)
where is a convex, closed, and bounded subsetof the cone of positive semidefinite (Hermitian) matrices; func-tion is known, convex and finite over; is strongly convex and finite over ;
and the vector-valued function isaffine. Finally, sets , which define the space of pos-sible reference inputs for the dynamical systems, are assumedto comply to the following requirement.Assumption 2: Sets are convex and compact. Fur-
ther, has a non-empty feasible set and a finite optimal cost.
With these assumptions, problem (P1) is a convex program;moreover, it can be reformulated into a standard SDP form byresorting to the epigraph form of the cost function.It is evident from (2b) that (P1) defines the optimal oper-
ating setpoints of the dynamical systems (1) in terms of steady-state outputs [12], [20]. In fact, by utilizing the optimal solution
of (P1) as reference inputs, it follows from (2b) thateach system output will eventually be driven to the point
. Function (3a) captures costs incurred by the steady-stateoutputs, as well as costs associated with matrix variable ,which couples the steady-state system outputsthrough the linear equality constraints (3b).In principle, (P1) could be solved centrally by a system-level
control unit, which subsequently dispatches the reference sig-nals for the dynamical systems. In lieu of a cen-tralized solution of (P1), the objective here is to design a dis-tributed feedback controller for the dynamical systems (1), sothat the resultant closed-loop system is globally convergent toan equilibrium point , , wherethe values of the steady-state outputs coincide withthe optimal solution of (P1).
B. PV-Inverter Output Regulation to OPF SolutionsThe task of regulating the power output of PV inverters is out-
lined in this section, and cast within the framework of (1)–(3).In this regard, (1), (2) will model the inverter dynamics [30, Ch.8], [31]; while OPF will be formulated in the form (3) by lever-aging SDP relaxation techniques [23], [24].Network: Consider a distribution system comprising
nodes collected in the set , and lines represented by the setof undirected edges . The set

DALL’ANESE et al.: PHOTOVOLTAIC INVERTER CONTROLLERS SEEKING AC OPTIMAL POWER FLOW SOLUTIONS 2811
is partitioned as ,where node 0 denotes the secondary of the step-down trans-former; inverter-interfaced PV systems are located at nodes
[cf. (1)]; andcollects nodes with no power generation. For simplicity ofexposition, the framework is outlined for a balanced system;however, the proposed framework can be extended to unbal-anced multi-phase systems as explained in Appendix D.Dynamics of PV Inverters: Equation (1a) is utilized to model
the dynamics of PV inverters, regulating real- and reactiveoutput powers to prescribed setpoints. For example, relevantdynamical models for inverters operating in a grid-connectedmode are discussed in, e.g., [30, Ch. 8] and [31]. The dynamicsof inverters implementing droop control are explained in, e.g.,[18]. These models can be conveniently cast within (1), (2) asshown next.• Let and
denote the instan-taneous output real and reactive powers of inverter
, respectively, where is the grid frequency,the voltage waveform,
and is the current injected. Further, let anddenote averages of the instantaneous output real and
reactive powers over an AC cycle; that is,
(4)
Then, the state of system (1) is .• Vector collects the constant commanded realand reactive powers for inverter . By (2), inverters regulatethe output powers to the commanded setpoints ; see, e.g.,[30, Ch. 8], [31].
• Let and denote the demanded real and re-active loads at node . Then, vector is set to be
for all .• By setting
(5)
it follows that (1b) equates the state with the measurementof the inverter output powers.
Steady-State OPF Problem: Letbe the phasor representation of the steady-state voltage at node
. Similarly, let denote the phasor for the currentinjected at node , and defineand . Then, using Ohm's andKirchhoff's circuit laws, the linear relationship canbe established, where is the admittance ma-trix formed based on the distribution-network topology and the-equivalent circuits of lines [32, Ch. 6]; see, e.g., [10], [23],
[24], [33] for details on the construction of matrix .For prevailing ambient conditions, let denote the
available real power for the inverter . The availablepower is a function of the incident irradiance, and correspondsto the maximum power point of the PV array. When PV-sys-tems operate at unity power factor [6], a set of challenges re-lated to power quality and reliability in distribution systemsmayemerge for sufficiently high levels if deployed PV capacity [1].For instance, overvoltages may be experienced during periodswhen PV generation exceeds the household demand [1], while
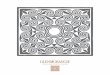
Fig. 1. Operating regions for PV inverter under: (a) reactive power com-pensation [3]; (b) real power curtailment [4]; and (c) combined real- and reac-tive-power control [6].
fast-variations in the PV-output tend to cause transients thatlead to wear-out of legacy switchgear [2]. Efforts to ensure re-liable operation of existing distribution systems with increasedbehind-the-meter PV generation are focused on the possibilityof inverters providing reactive power compensation and/or cur-tailing real power [3]–[6]. In the most general setting, the set ofoperating points for PV inverters providing ancillary servicescan be specified as
(6)
where is the rated apparent power, and the last inequality isutilized to enforce a minimum power factor of . Parame-ters and can be conveniently tuned to account for thefollowing strategies:(c1) Reactive power compensation: , ;(c2) Active power curtailment: , ; and(c3) Active and reactive control: , .The PV-inverter operating regions involved by strategies
(c1)–(c3) are illustrated in Fig. 1. It is evident that setsadhere to Assumption 2.For given load and ambient conditions, a prototypical OPF
formulation for optimizing the steady-state operation of a dis-tribution system is given as follows:
(7a)
(7b)(7c)(7d)(7e)
where and are prescribed voltage limits (e.g., ANSIC84.1 limits); the constraint on is left implicit; (7e) specifiesthe feasible inverter operating region [cf. Fig. 1]; and equalities(7b), (7c) capture the power-balance equations for nodes withand without inverters, respectively. For nodes without loads(e.g., utility poles), one clearly has that .Function can capture various network-oriented perfor-
mance objectives that the distribution system operator (DSO)may pursue. For example, the DSO may aim to minimize thepower losses on the distribution lines, voltage magnitude devia-tions from nominal, and/or the power drawn from the substation

2812 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 31, NO. 4, JULY 2016
[7], [8]. On the other hand, function models PV-in-verter costs/rewards for ancillary service provisioning such asreal power curtailment and/or reactive power compensation [5],[6], [18]; for example, this function can be set to
, withdenoting market-oriented coefficients, to maximize the amountof power provided by PV systems. Finally, notice that additionalconstraints such as thermal limits may be naturally accommo-dated in (7).It is well-known that the OPF problem (7) is nonconvex, and
thus hard to solve to global optimality in both centralized anddistributed setups. Further, given that the problem is nonconvex,convergence of distributed algorithms (derived, e.g., via La-grangian decomposition techniques) is not always guaranteedand needs to be established. Since the objective of this work isto develop distributed controllers so that inverter output powersare provably convergent to OPF solutions, a convex reformula-tion of the OPF task is considered next.SDP Relaxation of the OPF Problem: To formulate an
SDP relaxation of the prototypical steady-state OPF problem(7), consider expressing steady-state powers and voltagemagnitudes as linear functions of the outer-product matrix
[23], [24], and define matrix per node, where denotes the canonical basis of . Using, form the Hermitian matrices ,
, and . Then, the balanceequations for real and reactive powers at node can beexpressed as and ,respectively. To reformulate the OPF in the form (3), considersetting , , and
(8)
Additionally, define the following convex set:
(9)
With these definitions, problem (7) can be equivalently ex-pressed as follows:
(10a)
(10b)(10c)
On par with (7), problem (10) is nonconvex because of therank constraint; however in the spirit of the SDP relaxation,the constraint (10c) can be dropped. Notice that, once the con-straint (10c) is dropped, the resultant SDP relaxation of the OPFproblem is in the form (3). If the optimal matrix of the re-laxed problem has , then the resultant powerflows are globally optimal [23], [24]. Sufficient conditions forthis relaxation to be exact for radial and balanced systems areprovided in [34], while its applicability to unbalanced multi-phase systems is investigated in [10].In this setup, the objective of the feedback controller that will
be designed in the following section, is to drive the inverteroutputs to the optimal solution
of the OPF problem.
III. FEEDBACK CONTROLLERDual -subgradient methods are leveraged in Section III-B to
synthesize controllers for systems (1) whose outputs track recur-sive solvers of (P1). Applications to the real-time PV-invertercontrol problem are discussed in Section IV.To streamline proofs of relevant analytical results, it will be
convenient to express the linear equality constraints (3b) in acompact form. To this end, define ,
and . Then,constraints (3b) can be compactly expressed as .
A. Primer on Dual Gradient MethodConsider the Lagrangian corresponding to (3), namely
(11)
where denotes the Lagrange multiplier associatedwith (3b). Based on (11), the dual function and the dual problemare defined as follows (see, e.g., [35]):
(12)
(13)
Regarding the optimal Lagrange multipliers, the followingtechnical requirement is presumed in order to guarantee theirexistence and uniqueness; see, e.g., [36].Assumption 3: Vectors
(14)
are linearly independent.Section IV will elaborate on how condition (14) can be
checked in the OPF context. Under current modeling assump-tions, it follows that the duality gap is zero, and the dualfunction is concave, differentiable, and it has a con-tinuous first derivative [37]. Consider then utilizing a gradientmethod to solve the dual problem, which amounts to iterativelyperforming [37]:
(15a)
(15b)
where denotes the iteration index, is thestepsize, and (15b) is repeated for all . In particular, a non-summable but square-summable stepsize sequence is adoptedin this paper [22]; that is, there exist sequences and
such that:(s1) as , and ;(s2) for all ; and(s3) as , and .At iteration , the same step-size is utilized for all .

DALL’ANESE et al.: PHOTOVOLTAIC INVERTER CONTROLLERS SEEKING AC OPTIMAL POWER FLOW SOLUTIONS 2813
Exploiting the decomposablility of the Lagrangian, steps (15)can be equivalently expressed as
(16a)(16b)
(16c)
with (16b), (16a) performed for all . Finally, notice thatfrom the compactness of sets and , it follows thatthere exists a scalar , , such that
(17)
Using (17), and a stepsize sequence satisfying(s1)–(s3), it turns out that the dual iterates converge tothe optimal solution of the dual problem (13); that is,
as [22], [35, Prop. 8.2.6], [37].Iterates and become asymptotically feasibleand their optimal values, and , can be re-covered from (16c) and (16b), respectively, oncebecomes available.Steps similar to (16) are typically adopted to enable a dis-
tributed solution of the OPF [9], [33], [38]–[41] as well as otherresource allocation tasks such as the economic dispatch problemand residential load control [42]. As illustrated in Fig. 2(a) andexplained in detail in Section IV, updates (16a), (16b) are imple-mented at each individual PV system while (16c) is performedat the DSO. However, in conventional approaches, the optimalreference signals are implemented at the PV-in-verters onlywhen the distributed algorithm converges to the op-timal solution. It is evident that under this operating paradigmthe optimization and local control tasks operate at two differenttime scales, with reference signals updated every time that theOPF problem is solved and implemented only when the inverterdynamics are in steady state. This motivates the development ofcontrol schemes that continuously pursue solutions of the OPFproblem by dynamically updating the setpoints, based on cur-rent system outputs and problem parameters. This is describednext.
B. Controller Synthesis
Consider updates performed at discrete time instants, with , , and let
denote the values of primal and dual variables, respectively,at time . The following method accounts for the system dy-namics in (1) while solving (P1) with dual-gradient-based ap-proaches.At time , the system outputs are sampled as
(18a)
and they are utilized to update the dual variables as follows:
(18b)
Given , the primal variables andare then updated as
(18c)
(18d)
Once (18c) is solved, the vector-valued reference signalis applied to the dynamical system (1a) over the
interval ; that is, , .At time , the system outputs are sampledagain, and (18b), (18c) are repeated. Notice that, differentlyfrom standard dual gradient methods, variable is replacedby the sampled system output in the ascent step (18b).Steps (18b), (18c) in effect constitute the controller for the dy-
namical systems (1). Specifically, the (continuous-time) refer-ence signals produced by the controller have stepchanges at instants , are left-continuous functions,and take the constant values over the time in-terval . It is evident that if converges to as
(and thus as ), thenas by virtue of (2).Suppose for now that the interval is large
enough to allow the outputs to converge to thecommanded input [cf. (2)]. Under this idealsetup with a pronounced and tangible time-scale separa-tion between controller and system dynamics, one has that
, for all [cf. (2)], and step (18b) isreplaced by .Thus, (18) coincides with standard dual gradient method in(16), and the convergence results in [35, Prop. 8.2.6], [37]carry over to this ideal setup. In this work, convergence of thesystem outputs to the solution of (P1) is assessedin the more general case where update of reference signalsmay be performed faster than the systems' settling times andasynchronously, in order to achieve the following operationalgoals:(O1) Instead of waiting for the underlying systems to con-verge to intermediate reference levels , steps(18b)–(18d) are performed continuously (within the limits ofaffordable computational burden); i.e., at each instant , onemay have that for at least onedynamical system. This scenario is particularly relevant sincestep (18c) is computationally light: it affords a closed-formsolution when the inverter is operated under (c1) and (c2), andit involves a projection onto the inverter operating region under(c3) [cf. Fig. 1].(O2) The computational time required to solve the SDP problem(18d) is typical higher than that required by the projectionoperation (18c); especially when (18c) affords a closed-formsolution (see, e.g., [43], and pertinent references therein). Thus,convergence of the system outputs is investigated for the casewhere the update of the input reference levelsand the dual variables is performed at a fasterrate than (18d).To this end, suppose that the computational time required to
update matrix spans time intervals; that is, ifthe computation of (18d) starts at time based on the most

2814 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 31, NO. 4, JULY 2016
Fig. 2. (a) Conventional distributed optimization setup: Problem (3) is solved in a distributed fashion by using steps (16); once the problem is solved [i.e., iteratesin (16) have converged to the optimal primal and dual values], the optimal reference signals are dispatched to the PV-inverters. (b) Proposed opti-mization-centric control architecture: The discrete-time control signal generated by the dynamic controller is dynamically applied as an input to theinverter by utilizing a sample-and-hold (S/H) unit; the instantaneous inverter output is sampled and utilized for updating the control signals. The same architectureis utilized in the asynchronous case (20), upon substituting (18d) with (20d). As claimed in Theorem 1, the inverter outputs converge to the solutionof the OPF problem. Details on the distributed implementation are provided in Section IV.
up-to-date dual variables , its solution becomesavailable only at time . In contrast, the controller affordsthe computation of steps (18c) and (18b) at each time .To capture this asynchronous operation, consider the mapping
(19)
Using (19), steps (18) for all are modified as
(20a)
(20b)
(20c)
for all , . Further, matrix is updated (at thepossibly slower rate) as
(20d)
Since over the interval , (20d) in-dicates that is being updated every time slots. The blockdiagram for (20) can be readily obtained by replacing step (18d)with (20d), as well as (18b) and (18c) with (20b) and (20c), re-spectively, in Fig. 2.In the following, convergence of the system outputs to the
solution of the steady-state optimization problem (P1) is es-tablished when the reference signals are produced by (20). Of

DALL’ANESE et al.: PHOTOVOLTAIC INVERTER CONTROLLERS SEEKING AC OPTIMAL POWER FLOW SOLUTIONS 2815
course, by setting , steps (20) coincide with (18), andtherefore the convergence claims for this more general settingnaturally carry over to the synchronous setup in (18).For brevity, collect the system outputs in the vector
, and the dual variables in .In the following, it will be shown that (18b) and (20b) arein fact -subgradient steps [21, Proposition 2] whenever
and/or . Before elaboratingfurther on the error , notice that from the compactness ofsets and , it follows that there exists a constant
such that the following holds:
(21)
with . Furthermore, given the Lipschitz-continuity of the contraction mapping (18c) [44]
(22)
there exists satisfying
(23)
that is, would be obtained by minimizing the Lagrangian
when replaces. The following will be assumed for .
Assumption 4: There exists a scalar , , suchthat the following bound holds for all ,
(24)
Condition (24) implicitly bounds the reference signal trackingerror , as specified in the following lemma.Lemma 1: Under Assumption 4, it follows that the tracking
error , , can be bounded as
(25)
where is the Lipschitz constant of function in (22).Proof: See Appendix A.
It can be noticed from (25) that the tracking error is al-lowed to be arbitrarily large, but the outputs shouldeventually follow the reference signal . In fact, since thesequence is majorized by , and , it follows that
as . Based on this assumption,two results that establish convergence of the overall system arein order: Lemma 2 provides an analytical characterization ofthe -subgradient step, while Theorem 1 establishes asymptoticconvergence of the output powers to the optimal solution of(P1).
Lemma 2: Suppose that at least one of the following state-ments is true: 1) ; 2) at time , for atleast one dynamical system. Then, is an-subgradient of the dual function at . In particular, underAssumption 4 and with , it holds that
(26a)
where the error can be bounded as
(26b)
Proof: See Appendix B.Theorem 1: Under Assumptions 1–4, and for any, the following holds for the closed-loop system (20) when
a stepsize sequence satisfying conditions (s1)–(s3) isutilized:1) as ;2) and as ;3) as , .
Statements 1)–3) hold for any initial conditions, and any
duration of the intervals , .Proof: See Appendix C.
Remark (convex relaxation or approximation of the OPF).For illustration purposes, the SDP relaxation technique for theOPF task is considered in this paper. However, the synthesisprocedure outlined in the next section to develop feedback con-trollers that drive the inverter outputs to solutions of pertinentconvex optimization problems can be utilized in a variety ofdifferent setups. For example, it can be utilized when second-order cone relaxations [25] or linear approximations [26]–[28]of the OPF problem are utilized. The paper considers convex re-laxations or approximations of the OPF problem because dual-subgradient-type methods are guaranteed to converge to op-timal dual and primal solutions when applied to convex prob-lems. The design of feedback controllers in the case of non-convex programs and their convergence will be the subject offuture efforts.Remark (discrete variables). The OPF formulation consid-
ered in this paper does not include the optimization of the trans-former taps at the substation as well as taps of capacitor banks.Rather, these quantities are considered as inputs to the OPFproblem, and are utilized to set the voltage at the substation[5]–[8] and form the (time-varying) admittance matrix in (7).This strategy ensures full interoperability of the proposed con-trollers with legacy switchgear. However, it is worth noticingthat transformer taps can be included in the optimization pro-cedure by following the relaxation method investigated in, e.g.,[33].

2816 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 31, NO. 4, JULY 2016
Algorithm 1: Distributed architecture: inverter operation
for do[S1] Sample the inverter output
.[S2] Receive from utility, if available(i.e., if ).[S3] Compute stepsize , and updatevia (20b).[S4] Update the setpoints via (20c), andimplement at the inverter.[S5] Transmit to the utility.Go to step 1.
end for
Algorithm 2: Distributed architecture: DSO operation
for do[S1] Transmit to inverter . Repeatfor all .[S2] Receive from inverter . Repeatfor all .[S3] Start the update of via (20d).
end for
IV. DISTRIBUTED IMPLEMENTATION OF THE CONTROLLERS
When applied to the PV-inverter regulation problem out-lined in Section II-B, the controller (20b)–(20d) endowseach PV-inverter with the capability of steeringits power output towards the so-lution of the formulated AC OPFproblem. Claims 1)–4) of Theorem 1 hold for any duration
, , for any size of the distributionnetwork.The feedback controller (20) affords a distributed implemen-
tation, where optimization tasks are distributed between theDSO and individual PV systems; see also Fig. 2. In particular:1) Updates (20b), (20c) are implemented at each individualPV system (they are either embedded in the inverter mi-crocontroller, or, at the gateway level), and and arestored locally at the same inverter; these steps are per-formed continuously, within affordable computational andhardware limits. Particularly, (20c) is performed with thegoal of pursuing inverter-related optimization objectivessuch as minimization of the real power curtailed [6].
2) at the DSO, updates (20d) are performed with the goalof pursuing system-wide optimization objectives such asminimization of power losses and voltage regulation (thisstep is performed every time steps).
To exchange relevant control signals, a bidirectional mes-sage passing between DSO and individual PV systems is nec-essary. This entails the following message exchanges everytime slots: is sent from the DSO to inverter ; sub-sequently, the up-to-date dual variable is sent from in-verter to the DSO. Notice that customer does not shareload demand and PV-related information with the DSO; in fact,information about the loads is not necessary when computingthe update (20d) at the DSO. Exchanging just Lagrange mul-tipliers rather than power iterates ensures a privacy-preservingoperation. The operating principles at both inverter and DSOare tabulated as Algorithm 1 and Algorithm 2, respectively, andschematically illustrated in Fig. 2. In Algorithm 1, is it alsoshown that the stepsize sequence satisfying condi-tions (s1)–(s3) is computed at the inverters' side; when changesin the load and solar irradiation conditions occur (that is, theinputs of the underlying OPF task change), inverters exchangeinformation to restart the sequence. For example, each invertercan utilize the sequence , with ,a given constant, and the index of the instant with the lastchange in the operating conditions.Before proceeding, it is worth reiterating the underlying
difference between distributed optimization approaches [9],[33], [38]–[41] and the proposed idea. In particular:Conventional distributed optimization: distributed OPF ap-proaches involve the computation of steps similar to (16),schematically illustrated in Fig. 2(a). Particularly, the optimalreference signals are commanded to the PV-inverters onlyafter iterates (16) have converged. Accordingly, the referencesignals are updated at a slow time scale, dictated by the timerequired to solve the distributed OPF solver.Proposed scheme: as illustrated in Fig. 2(b), the proposedcontrollers continuously update the setpoints, based on currentsystem outputs, as well as solar irradiance and load conditions.Hence, the setpoints are updated at a significantly faster rate,that may be on the same order of the inverter dynamics. Asa result, the proposed controllers dynamically refresh theOPF-based targets every time that there is a variation in loads,conventional generators, and solar irradiance, and enableadaptability to fast-changing conditions.To implement the proposed architecture, each controller at
node needs to collect at each time measurementsof the demanded loads and , as well as the prevailingsolar irradiation conditions (which translate to the maximumavailable real power). On the other hand, to perform step(20d), the DSO requires knowledge of the system topologyand the load demand at nodes ; of course, anyAC OPF formulation has similar prerequisites in terms ofrequired data and measurements [5]–[8], [26], [27], [33]. Sincefunctions are linear in , the prerequisite (14)solely depends on the topology of the distribution network;thus, (14) can be checked at the utility side once matrix isavailable.

DALL’ANESE et al.: PHOTOVOLTAIC INVERTER CONTROLLERS SEEKING AC OPTIMAL POWER FLOW SOLUTIONS 2817
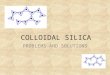
Fig. 3. IEEE 37-node test feeder considered in the test cases.
Finally, it is worth noticing that consensus-based techniquescan be adopted to speed up the computation of step (20d) andimprove scalability with respect to the distribution-system size[9], [10], [33], [38]. For example, by leveraging relevant ma-trix completion arguments [10], Lagrangian decomposition anddual gradient techniques can be adopted to decompose the com-putation of (20d) across lines and/or portions of the system [33],[38]. The resultant algorithmwould be similar to the one in (20),but with step (20d) replaced by multiple sub-problems (one perline or portion of the system) that are solved in parallel, followedby relevant dual updates; see, e.g., [33], [38] and [9], [10]. Itcan be readily shown that the convergence claims of Theorem 1carry over to this setup.
V. TEST CASES
The proposed PV-inverter control scheme is tested using amodified version of the IEEE 37-node test feeder and the IEEE123-node test feeder. The modified network is obtained by con-sidering a single-phase equivalent; line impedances, shunt ad-mittances, as well as active and reactive loads are adopted fromthe respective dataset.2 The solver SDP3 is utilized to solve rel-evant SDPs in MATLAB, whereas the update of the inverter set-points is computed in closed form. The objective of the test casesis to numerically corroborate the claims (1)–3) of Theorem 1.In the OPF problem, the voltage limits and are
set to 0.95 pu and 1.05 pu, respectively. In the first test, theIEEE 37-node test feeder illustrated in Fig. 3 is utilized. Thevoltage magnitude at the point of common coupling is fixed to
, and it is presumed that 6 PV systems are presentin the network and they are located at nodes 4, 11, 22, 26, 29,and 32. Following the technical approach of [30, Ch. 8] and
2Available at: ewh.ieee.org/soc/pes/dsacom/testfeeders.
[31], a first-order system is utilized to model the real and re-active power dynamics of each inverter. Further, inverters im-plement strategy (c3), and their regions of possible operatingpoints is formed based on the inverter power ratingsand the available active powers . Specifically, thepower ratings are assumed to be 50, 120, 50, 100, 120, and80 kVA, whereas the following values for the available powers
are considered in order to test theadaptability of the feedback controller to changing prevailingconditions (with time intervals normalized with respect to thetime constant ):(I1) , ;(I2) , ;(I3) , ;(I4) , .At , the output active and reactive powers are 0 kW and0 kVAr, respectively. No minimum power factor constraints areenforced (i.e., is ), and is set to 0 [4]. In this firsttest, models the cost of power drawn from the substationas . On the other hand,the function is set to
(27)
in order to minimize the amount of curtailed real power, as wellas the amount of reactive power provided. It is, however, worthemphasizing that various alternative cost functions can be ac-commodated in the proposed framework, and (27) is utilizedas a representative example. Coefficients are set to
for , andfor , 6. With this
setup, the SDP relaxation was first tested with these input data,the SDP solver identified solutions with rank-1 matrices[23], [24].At each inverter , the reference signal is up-
dated every ; i.e., for all . This im-plies that a new reference signal is applied to each inverterfaster than the output power settling time (which corresponds toapproximately 5 for a first-order system). On the other hand,matrix is updated every ; i.e., in (20).This means that the inverter setpoints are updatedat a faster rate than matrix . The stepsize in (20) is set to
, with and the index of the instantwith the last step change.Fig. 4 illustrates the evolution of the real and reactive powers
generated by the inverters. It can be seen that the inverter outputsconverge in all the considered inter-
vals (I1)–(I4), and the output powers at convergence coincidewith the solutions of the OPF (P1); for example, before the stepchange at , the active and reactive powers converged tothe OPF solution 21.8, 66.9, 20.9, 67.9, 39.9 kW and 39.2, 85.6,40.7, 77.1, 31.4, 39.8 kVAr. This corroborates the claims of The-orem 1. Fig. 4(b) also provides a snapshot of the evolution of the

2818 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 31, NO. 4, JULY 2016
Fig. 4. Convergence of (20), when the inverter-power dynamics are approxi-mated as first-order systems with time constant , for four different solar irradi-ance conditions. Plots illustrate the convergence of the real and reactive powersto the solutions of the formulated OPF problem.
output reactive power for inverter 2; it can be seen that a newreference level is applied after seconds, before settlesaround the intermediate setpoint. It is also interesting to notethat, in the considered setup, the steady-state reactive powerscoincide with the available powers , and reactive com-pensation turns out to be the optimal ancillary service strategy.Similar trajectories would have been obtained when the loadsare also time varying. Future efforts will explore variations ofload and solar irradiance that may have the same temporal scaleof the dynamics of (20).In the second test case, a scenario with high PV-pene-
tration is considered. Specifically, 17 PV systems are as-sumed located at nodes 4, 11, 13, 16, 17, 20, 22, 23, 26,28, 29, 30, 31, 32, 33, 34, 36 of the feeder depicted inFig. 3, and their AC power ratings are assumed to be
. Similar to the previous case, stepchanges in the solar irradiation (and, hence, in the availablepowers ) are considered in order to test the adaptabilityof the feedback controller to changing prevailing conditions.Specifically, the following values are tested:(I1) , ;(I2) , ;(I3) , ;(I4) , .At each inverter , the reference signal isupdated every , while is updated every
. The voltage magnitude at the substation is setto 1.02 pu, while coefficients in (27) are set to
for all . Allthe other simulation parameters are similar to the previous testcase. The SDP relaxation was tested under this setup, and theSDP solver identified solutions with rank-1 matrices forall the four cases considered [23], [24].With this setup, when inverters operate at unity power factor
and set , the voltage magnitudes exceed the upperlimit of 1.05 pu during the interval in 10 nodes.Specifically, the voltage profile is shown with the yellow trajec-tory in Fig. 5(a).The objective of this test case is twofold: 1) demonstrate
voltage regulation capabilities of the proposed scheme; and 2)demonstrate that the convergence speed is not deteriorated whena higher number of PV systems are controlled. As for objectivei), it can be clearly seen in Fig. 5(a) and (b) that the voltages aresteadily kept within the limits and ; particularly, thegreen trajectory in Fig. 5(a) shows that the proposed scheme fa-vors voltage regulation even during peak generation conditions,while minimizing the amount of curtailed real power [cf. (27)].Fig. 5(c) and (d) illustrates the evolution of the real and reac-tive powers generated by the inverters. Comparing Fig. 4 withFig. 5(c) and (d), it can be noticed that the proposed controllersstill provide fast adaptation capabilities to changes in the solarirradiation; and furthermore, convergence speed is not degradedwhen an increased number of PV systems are controlled.In the third test case, the IEEE 123-node test feeder il-
lustrated in Fig. 6 is utilized. The voltage magnitude at thepoint of common coupling is fixed to , and itis presumed that 10 PV systems are located at nodes 15,23, 47, 66, 71, 81, 86, 91, 108, and 110. Inverters imple-ment strategy (c3), and their AC power ratings amount to
.Changes in the solar irradiation are considered in order totest the adaptability of the feedback controller for this largersystem; the following values are tested:(I1) , ;(I2) , ;(I3) , .Similar to the previous test cases, the reference signals
are updated every , while is up-dated every . In the OPF problem, function
captures (the cost of) power losses, and it is set to, with matrix formed
as described in [10]. The coefficients in (27) are set tofor all inverters. All the other
simulation parameters are similar to the previous test case.The SDP relaxation was tested, and the SDP solver identifiedsolutions with rank-1 matrices .Fig. 7(c) and (d) illustrates the evolution of the real and re-
active powers generated by the 10 inverters. It can be seen thatthe inverters quickly regulate the power outputs to new OPFsetpoints. In particular, comparing Figs. 4, 5, and 7, it can benoticed that the convergence speed of the proposed controllers

DALL’ANESE et al.: PHOTOVOLTAIC INVERTER CONTROLLERS SEEKING AC OPTIMAL POWER FLOW SOLUTIONS 2819
Fig. 5. Test case with high PV-penetration. (a) Voltage profile at . (b) Evolution of the voltages using the proposed control scheme. (c) Real powersprovided by the inverters. (d) Reactive powers provided by the inverters.
Fig. 6. IEEE 123-node test feeder considered in the third test case. Blue squaresrepresent nodes at which PV systems are installed.
is not degraded when a larger distribution network is controlled.Notice that inverters are required to curtail real power in orderto adhere to voltage limits.Finally, it is worth mentioning that, for the update (20d),
well-established complexity bounds for convex programs suchas SDPs [43] exist; these bounds quantify how the worst-casecomputational complexity increases with the number of vari-ables (i.e., the network size). Further, in case of an SDP, prov-ably convergent parallelization techniques can also be leveragedto speed up the computation of (20d); see, e.g., [45].
Fig. 7. Convergence of (20), for the modified IEEE 123-node test feeder. Theinverter-power dynamics are approximated as first-order systems with time con-stant , for four different solar irradiance conditions. Plots illustrate the conver-gence of the real and reactive powers to the solutions of the formulated OPFproblem.

2820 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 31, NO. 4, JULY 2016
VI. CONCLUDING REMARKS AND FUTURE WORK
This paper considered a distribution network featuring PVsystems, and addressed the synthesis of feedback controllersthat seek inverter setpoints corresponding to AC OPF solutions.To this end, dual -subgradient methods and SDP relaxationswere leveraged. Global convergence of PV-inverter outputpowers was analytically established and numerically corrobo-rated. Although the focus was on PV systems, the frameworknaturally accommodates different types of inverter-interfacedenergy resources. The development of provably convergenctfeedback controllers that seek the solutions of non-convex OPFformulations will be the subject of future research efforts.
APPENDIX
A. Proof of Lemma 1Recall first that, given the strong convexity of , it turns
out that function in (22) is Lipschitz continuous (in ),with a constant denoted here as [44]. Then, recalling that
and , it follows that theleft-hand side of (25) can be bounded as
(28a)
(28b)
where (28b) is obtained by using the following bound (whichoriginates from Assumption 4):
(28c)
(28d)(28e)
Note that (28d) follows from the dual update in (20b), and (28e)follows from (21).
B. Proof of Lemma 2Recall that is the gradient of the dual
function (12) evaluated at [35]. Let forexposition simplicity, and consider decomposing (12) as
, with
(29a)
(29b)
where . Then, it will be shown that
(29c)
(29d)
with and .To show (29c), consider the gradient of evalu-
ated at , which by definition leads to the inequality
for all ; then,add on both sides to obtain
(29e)
and add and subtract to the right-hand side
(29f)
In (29f), define. By using the definition of the
gradient of the function at , and applying theCauchy-Schwartz inequality, one has that
(29g)
(29h)
where (20b), (21), and (24) were used to obtain (29h)from (29g). Next, to show (29d), begin with the inequality
. Addingto both sides of the inequality
(29i)
Adding and subtracting the sequencesand to the right-hand-side of(29i), and suitably rearranging terms, one obtains
(29j)where is defined as
(29k)
Using the definition of the gradient, the Cauchy-Schwartz in-equality, and (21), (29k) can be bounded as
(29l)
Finally, upon using (20b) and (21), (29l) can be fur-ther bounded as
.

DALL’ANESE et al.: PHOTOVOLTAIC INVERTER CONTROLLERS SEEKING AC OPTIMAL POWER FLOW SOLUTIONS 2821
C. Proof of Theorem 1Claims 1)–2). Boundedness and convergence of the dual it-
erates can be proved by leveraging the results in [22, Theorem3.4]. In particular, it suffices to show that the following tech-nical requirement is satisfied in the present setup:
(30a)
From Lemma 2, it can be shown that
(30b)
where the second inequality in (30b) follows from the factthat for all . Since , the series
is finite. As for the error , one has that
(30c)
(30d)
(30e)
where the fact that is utilized in(30d), and (30e) follows from (30d) since the sequencemajorizes , and it is monotonically decreasing. Sincethe series is square-summable, is finite.Claim 3) From the convexity of the Lagrangian in
the primal variables, it follows that optimal primal vari-ables can be uniquely recovered as
.Claim 4) At convergence, the reference signal is constant,
with value . Then, as by (2).
D. Extension to Multi-Phase SystemsFor notation and exposition simplicity, Sections II and
IV considered a balanced distribution network. However, theproposed framework can be extended to multi-phase systemsas detailed in [10], [33], and [46] and briefly explained in thefollowing.Define as and the sets of
phases of line and node , respectively. Here-after, a superscript is utilized to assign relevant electricalquantities to a specific phase. For example, denotesthe complex line-to-ground voltage at node and phase
, whereas is the phasor representation of thecurrent injected at the same node and phase; further, and
denote the output real and reactive powers of a PV-in-verter connected to phase of node . Lines
are still modeled as -equivalent components [32,Ch. 6] and the phase impedance and shuntadmittance matrices are denoted as and
, respectively. Three- or single-phasetransformers (if any) are modeled as series components withtransmission parameters that depend on the connection type[8], [32, Ch. 8].
A prototypical non-convex OPF formulation can be readilyobtained by enforcing the balance constraints and the voltageregulation constraints on a per-node and per-phase basis [8],[10], [46]; and by properly augmenting the cost functionto account for (cost of) power losses and power injec-tions over all phases. To develop an SDP relaxation of thenon-convex three-phase OPF problem, consider re-definingthe vector of voltages as , where
is a vector collecting the volt-ages on the phases of node . Similarly, vector nowcollects the currents injected in all nodes and phases; that is,
. As shown in Section II, Ohm's lawand Kirchhoff's current law can be captured by the linearequation where, in this case, the network admit-tance matrix has dimensions ,and its entries are computed based on the system topologyand the lines matrices as specified in [10],[33], and [46]. To express voltage magnitudes and powersas linear functions of the outer-product matrix ,define matrix per node and phase ,where ,and denotes the canonical basis of . Next, pernode and phase , define the Hermitian matrices
, , and. Then, the net real and reactive powers injected
at node and phase can be expressed asand , respectively, whereas thesquared voltage magnitude at the same node and phase reads
.Using these definitions, the OPF problem can be formulated
as
(31a)
(31b)(31c)
(31d)
(31e)
where , ,and [cf. (8)]. An SDP relaxation of problem(31) can be obtained by discarding the rank constraint (31e).The procedure outlined in Section III-B can be utilized to syn-
thesize controllers for the PV-inverters that solve (31) in a re-cursive manner. To this end, if suffices to dualize balance con-straints (31b) to form the (partial) Lagrangian (11), and followsteps (20). In particular, the resultant distributed algorithm en-tails the following operations:
(32a)
(32b)
(32c)

2822 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 31, NO. 4, JULY 2016
(32d)
where (32a)–(32c) are performed at each PV-inverter connectedto phase of node , and (32d) is carried out at the DSO. In(32d), the set is defined as
(33)
It can be readily shown that the convergence claims of Theorem1 carry over to the multi-phase setup.
REFERENCES[1] E. Liu and J. Bebic, Distribution System Voltage Performance Anal-
ysis for High-Penetration Photovoltaics, Feb. 2008, NREL TechnicalMonitor: B. Kroposki. Subcontract Report NREL/SR-581-42298.
[2] A.Woyte, V. Van Thong, R. Belmans, and J. Nijs, “Voltage fluctuationson distribution level introduced by photovoltaic systems,” IEEE Trans.Energy Convers., vol. 21, no. 1, pp. 202–209, Mar. 2006.
[3] P. Jahangiri and D. C. Aliprantis, “Distributed Volt/VAr control by PVinverters,” IEEE Trans. Power Syst., vol. 28, no. 3, pp. 3429–3439,Aug. 2013.
[4] R. Tonkoski, L. A. C. Lopes, and T. H. M. El-Fouly, “Coordinated ac-tive power curtailment of grid connected PV inverters for overvoltageprevention,” IEEE Trans. Sustain. Energy, vol. 2, no. 2, pp. 139–147,Apr. 2011.
[5] M. Farivar, R. Neal, C. Clarke, and S. Low, “Optimal inverter VARcontrol in distribution systems with high PV penetration,” in Proc.IEEE PES General Meeting, San Diego, CA, USA, Jul. 2012.
[6] E. Dall'Anese, S. V. Dhople, and G. B. Giannakis, “Optimal dispatch ofphotovoltaic inverters in residential distribution systems,” IEEE Trans.Sustain. Energy, vol. 5, no. 2, pp. 487–497, Apr. 2014.
[7] H. M. Khodr, M. A. Matos, and J. Pereira, “Distribution optimal powerflow,” in Proc. IEEE Power Tech., Lausanne, Switzerland, Jul. 2007,pp. 1441–1446.
[8] S. Paudyal, C. A. Canizares, and K. Bhattacharya, “Optimal operationof distribution feeders in smart grids,” IEEE Trans. Ind. Electron., vol.58, no. 10, pp. 4495–4503, Oct. 2011.
[9] E. Dall'Anese, S. V. Dhople, B. B. Johnson, and G. B. Giannakis, “De-centralized optimal dispatch of photovoltaic inverters in residential dis-tribution systems,” IEEE Trans. Energy Convers., vol. 29, no. 4, pp.957–967, Dec. 2014.
[10] E. Dall'Anese, H. Zhu, and G. B. Giannakis, “Distributed optimalpower flow for smart microgrids,” IEEE Trans. Smart Grid, vol. 4, no.3, pp. 1464–1475, Sep. 2013.
[11] F. Capitanescu, I. Bilibin, and E. Romero Ramos, “A comprehensivecentralized approach for voltage constraints management in active dis-tribution grid,” IEEE Trans. Power Syst., vol. 29, no. 2, pp. 933–942,Mar. 2014.
[12] A. Jokić, M. Lazar, and P. Van den Bosch, “On constrained steady-stateregulation: Dynamic KKT controllers,” IEEE Trans. Autom. Control,vol. 54, no. 9, pp. 2250–2254, Sep. 2009.
[13] A. Jokić, M. Lazar, and P. Van den Bosch, “Real-time control of powersystems using nodal prices,” Int. J. Elect. Power Energy Syst., vol. 31,no. 9, pp. 522–530, 2009.
[14] N. Li, L. Chen, C. Zhao, and S. H. Low, “Connecting automatic gen-eration control and economic dispatch from an optimization view,” inProc. Amer. Control Conf., Portland, OR, USA, Jun. 2014.
[15] L. Chen and S. You, “Reverse and forward engineering of frequencycontrol in power networks,” in Proc. 53rd IEEE Conf. Decision andControl, Los Angeles, CA, USA, Dec. 2014.
[16] X. Zhang and A. Papachristodoulou, “Distributed dynamic feedbackcontrol for smart power networks with tree topology,” in Proc. Amer.Control Conf., Portland, OR, USA, Jun. 2014.
[17] X. Ma and N. Elia, “A distributed continuous-time gradient dynamicsapproach for the active power loss minimizations,” in Proc. 51st Annu.Allerton Conf. Commun., Control, and Comput., UIUC, Champaign,IL, USA, Oct. 2013.
[18] F. Dörfler, J. W. Simpson-Porco, and F. Bullo, Breaking the Hierarchy:Distributed Control & Economic Optimality in Microgrids, 2014 [On-line]. Available: http://arxiv.org/pdf/1401.1767v1.pdf
[19] K. J. Arrow, L. Hurwicz, and H. Uzawa, Studies in Linear andNonlinear Programming. Stanford, CA, USA: Stanford Univ. Press,1958.
[20] K. Hirata, J. P. Hespanha, and K. Uchida, “Real-time pricing anddistributed decision makings leading to optimal power flow of powergrids,” in Proc. Amer. Control Conf., submitted for publication.
[21] T. Larsson, M. Patriksson, and A.-B. Strömberg, “On the convergenceof conditional epsilon-subgradient methods for convex programs andconvex-concave saddle-point problems,” Eur. J. Oper. Res., vol. 151,no. 3, pp. 461–473, 2003.
[22] K. Kiwiel, “Convergence of approximate and incremental subgradientmethods for convex optimization,” SIAM J. Optimiz., vol. 14, no. 3, pp.807–840, 2004.
[23] X. Bai, H.Wei, K. Fujisawa, and Y.Wang, “Semidefinite programmingfor optimal power flow problems,” Int. J. Elect. Power Energy Syst.,vol. 30, no. 6–7, pp. 383–392, 2008.
[24] J. Lavaei and S. H. Low, “Zero duality gap in optimal power flowproblem,” IEEE Trans. Power Syst., vol. 1, no. 1, pp. 92–107, Feb.2012.
[25] M. Farivar and S. H. Low, “Branch flow model: Relaxations andconvexification—Part I,” IEEE Trans. Power Syst., vol. 28, no. 3, pp.2554–2564, Aug. 2013.
[26] P. V. C. Coffrin, “A linear-programming approximation of AC powerflows,” INFORMS J. Comput., vol. 26, no. 4, 2014.
[27] S. Bolognani and S. Zampieri, “On the existence and linear approxima-tion of the power flow solution in power distribution networks,” IEEETrans. Power Syst., to be published.
[28] E. Dall'Anese and G. B. Giannakis, “Sparsity-leveraging reconfigura-tion of smart distribution systems,” IEEE Trans. Power Del., vol. 29,no. 3, pp. 1417–1426, Jun. 2014.
[29] H. K. Khalil, Nonlinear Systems. Englewood Cliffs, NJ, USA: Pren-tice Hall, 2002.
[30] A. Yazdani and R. Iravani, Voltage-Sourced Converters in Power Sys-tems: Modeling, Control, and Applications. New York, NY, USA:Wiley, 2010.
[31] H. Li, X. Yan, S. Adhikari, D. T. Rizy, F. Li, and P. Irminger, “Realand reactive power control of a three-phase single-stage PV system andPV voltage stability,” in Proc. IEEE PES General Meeting, San Diego,CA, USA, 2012.
[32] W. H. Kersting, Distribution System Modeling and Analysis, 2nd ed.Boca Raton, FL, USA: CRC Press, 2007.
[33] B. A. Robbins, H. Zhu, and A. D. Dominguez-Garcia, “Optimal tapsetting of voltage regulation transformers in unbalanced distributionsystems,” IEEE Trans. Power Syst., to be published.
[34] J. Lavaei, D. Tse, and B. Zhang, “Geometry of power flows and opti-mization in distribution networks,” IEEE Trans. Power Syst., vol. 29,no. 2, pp. 572–583, Mar. 2014.
[35] D. P. Bertsekas, A. Nedić, and A. E. Ozdaglar, Convex Analysis andOptimization. Belmont, MA, USA: Athena Scientific, 2003.
[36] G. Wachsmuth, “On LICQ and the uniqueness of Lagrange multi-pliers,” Oper. Res. Lett., vol. 41, no. 1, pp. 78–80, 2013.
[37] Y. C. Cheng, “Dual gradient method for linearly constrained, stronglyconvex, separable mathematical programming problems,” J. Optimiz.Theory Applicat., vol. 53, no. 2, pp. 237–246, 1987.
[38] A. Y. Lam, B. Zhang, A. Domínguez-García, and D. Tse, “An optimaland distributed method for voltage regulation in power distribution sys-tems,” IEEE Trans. Power Syst. vol. 30, no. 4, pp. 1714–1726, Jul.2015.
[39] R. Baldick, B. H. Kim, C. Chase, and Y. Luo, “A fast distributed im-plementation of optimal power flow,” IEEE Trans. Power Syst., vol.14, no. 3, pp. 858–864, Aug. 1999.
[40] G. Hug-Glanzmann and G. Andersson, “Decentralized optimal powerflow control for overlapping areas in power systems,” IEEE Trans.Power Syst., vol. 24, no. 1, pp. 327–336, Feb. 2009.
[41] T. Erseghe, “Distributed optimal power flow using ADMM,” IEEETrans. Power Syst., vol. 29, no. 5, pp. 2370–2380, Sep. 2014.
[42] N. Gatsis and G. B. Giannakis, “Residential load control: Distributedscheduling and convergence with lost AMI messages,” IEEE Trans.Smart Grid, vol. 3, no. 2, pp. 770–786, 2012.
[43] A. Nesterov and Y. Nemirovski, Interior-Point Polynomial Algorithmsin Convex Programming. Philadelphia, PA, USA: SIAM Studies inApplied Mathematics, 1994.

DALL’ANESE et al.: PHOTOVOLTAIC INVERTER CONTROLLERS SEEKING AC OPTIMAL POWER FLOW SOLUTIONS 2823
[44] M. Hong, X. Wang, M. Razaviyayn, and Z.-Q. Luo, Iterations Com-plexity Analysis of Block Coordinate Descent Method, 2013 [Online].Available: http://arxiv.org/abs/1310.6957
[45] T. Summers, A. Botros, J. Warrington, and J. Lygeros, “Large-scaleoptimal power flow using convex relaxations and distributed op-timization,” in Proc. IEEE Powertech, Power System Technology,Eindhoven, The Netherlands, Jul. 2015.
[46] L. Gan and S. H. Low, “Convex relaxations and linear approximationfor optimal power flow in multiphase radial networks,” in Proc. PowerSystem Computation Conf., Wroclaw, Poland, Aug. 2014.
Emiliano Dall’Anese (S’08–M’11) received theLaurea Triennale (B.Sc degree) and the LaureaSpecialistica (M.Sc degree) in telecommunicationsengineering from the University of Padova, Italy, in2005 and 2007, respectively, and the Ph.D. degreein information engineering from the Departmentof Information Engineering, University of Padova,Italy, in 2011.From January 2009 to September 2010, he was a
visiting scholar at the Department of Electrical andComputer Engineering, University of Minnesota,
Minneapolis, MN, USA. From January 2011 to November 2014, he was a Post-doctoral Associate at the Department of Electrical and Computer Engineeringand Digital Technology Center of the University of Minnesota, USA. SinceDecember 2014, he has been a Senior Engineer at the National RenewableEnergy Laboratory, Golden, CO, USA. His research interests lie in the areas ofpower systems, signal processing, and communications. Current efforts focuson distributed optimization and control of power distribution networks withdistributed (renewable) energy resources; analytical methods for large-scaleintegration of photovoltaic systems; and statistical inference for data analytics.
Sairaj V. Dhople (S’09–M’13) received the B.S.,M.S., and Ph.D. degrees in electrical engineeringfrom the University of Illinois, Urbana-Champaign,in 2007, 2009, and 2012, respectively.He is currently an Assistant Professor in the
Department of Electrical and Computer Engineeringat the University of Minnesota, Minneapolis, MN,USA, where he is affiliated with the Power andEnergy Systems research group. His research in-terests include modeling, analysis, and control ofpower electronics and power systems with a focus
on renewable integration.Dr. Dhople received the NSF CAREER Award in 2015. He currently serves
as an Associate Editor for the IEEE TRANSACTIONS ON ENERGY CONVERSION.
Georgios B. Giannakis (F’97) received the Diplomain electrical engineering from the National TechnicalUniversity of Athens, Greece, in 1981, and the M.Sc.degree in electrical engineering, the M.Sc. degree inmathematics, and the Ph.D. degree in electrical en-gineering from the University of Southern California(USC), Los Angeles, CA, USA, in 1983, 1986, and1986, respectively.Since 1999, he has been a Professor with the Uni-
versity of Minnesota, Minneapolis, MN, USA, wherehe now holds an ADC Chair in Wireless Telecommu-
nications in the Electrical and Computer Engineering Department, and serves asdirector of the Digital Technology Center. His general interests span the areasof communications, networking, and statistical signal processing—subjects onwhich he has published more than 375 journal papers, 635 conference papers, 22book chapters, two edited books and two research monographs (h-index 113).Current research focuses on learning from Big Data, wireless cognitive radios,and network science with applications to social, brain, and power networks withrenewables. He is the (co-) inventor of 25 patents issued.Dr. Giannakis is the (co-) recipient of 8 best paper awards from the IEEE
Signal Processing (SP) and Communications Societies, including the G. Mar-coni Prize Paper Award in Wireless Communications. He also received Tech-nical Achievement Awards from the SP Society (2000), from EURASIP (2005),a Young Faculty Teaching Award, the G.W. Taylor Award for Distinguished Re-search from the University of Minnesota, and the IEEE Fourier Technical FieldAward (2015). He is a Fellow of EURASIP, and has served the IEEE in a numberof posts, including that of a Distinguished Lecturer for the IEEE-SP Society.