Embed Size (px)
Citation preview
Image-guided therapy andmedical robotics tutorialusing a LEGO MindstormsNXT robot and 3D Slicer
Danielle F. Pace, B.CmpHRon Kikinis, M.D.
Nobuhiko Hata, Ph.DSurgical Planning Laboratory,
Brigham and Women’s Hospital andHarvard Medical School
Part I: Background and Materials
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -2-
Funding Information
This tutorial was made possible by grant numbers5U41RR019703, 5P01CA067165 and 5U54EB005149 fromthe National Institutes of Health (NIH). Its contents are solelythe responsibility of the authors and do not necessarilyrepresent the official views of the NIH. This tutorial was alsoin part supported by National Science Foundation (NSF) grantnumber 9731748 and the Center for Integration of Medicineand Innovative Technology (CIMIT).
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -3-
Goals of the image-guided therapyand medical robotics tutorial
• To demonstrate the typical steps of an image-guided therapy (IGT) or medical roboticsprocedure.
• To learn in a hands-on manner using a LEGOMindstorms NXT, a LEGO phantom andsophisticated medical image processing and IGTsoftware (3D Slicer).
The example procedure that we will use to dothis is a needle biopsy.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -4-
Goals of the background andmaterials section
• To provide theoretical background on image-guided therapy and medical robotics.
• To assemble the necessary materials for thebasic and advanced tutorial sections.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -5-
PART I:What are image-
guided therapy andmedical robotics?
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -6-
Introduction to Image-GuidedTherapy (IGT)
Image-guided therapy (IGT) allows us to seeinside the body so that we can performmedical procedures with greater accuracy andusing minimally invasive techniques.
(Other names for IGT: computer-assisted surgery, computer-aided surgery)
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -7-
Advantages of IGT
• Enables new minimally-invasive procedures• Improves postoperative outcomes• Increases quality and speed of surgical
procedures• Shortens hospital stays• Decreases long-term health care cost
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -8-
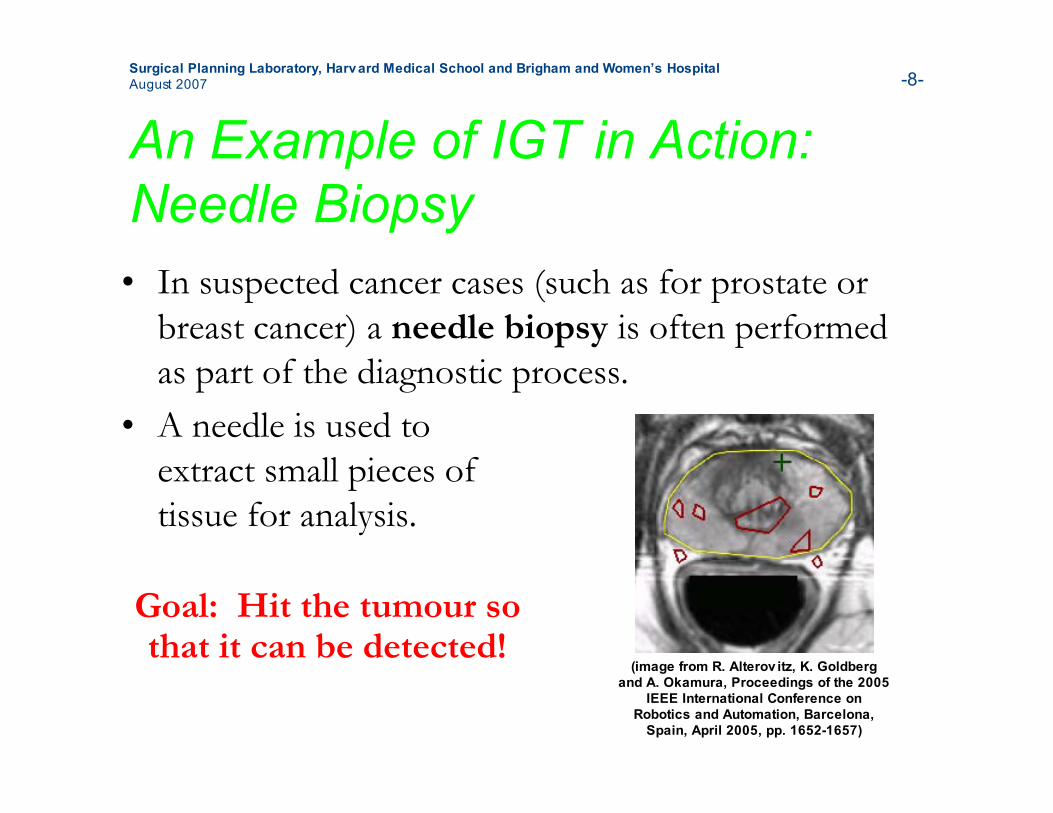
An Example of IGT in Action:Needle Biopsy• In suspected cancer cases (such as for prostate or
breast cancer) a needle biopsy is often performedas part of the diagnostic process.
• A needle is used toextract small pieces oftissue for analysis.
Goal: Hit the tumour sothat it can be detected!
(image from R. Alterov itz, K. Goldbergand A. Okamura, Proceedings of the 2005
IEEE International Conference onRobotics and Automation, Barcelona,
Spain, April 2005, pp. 1652-1657)
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -9-
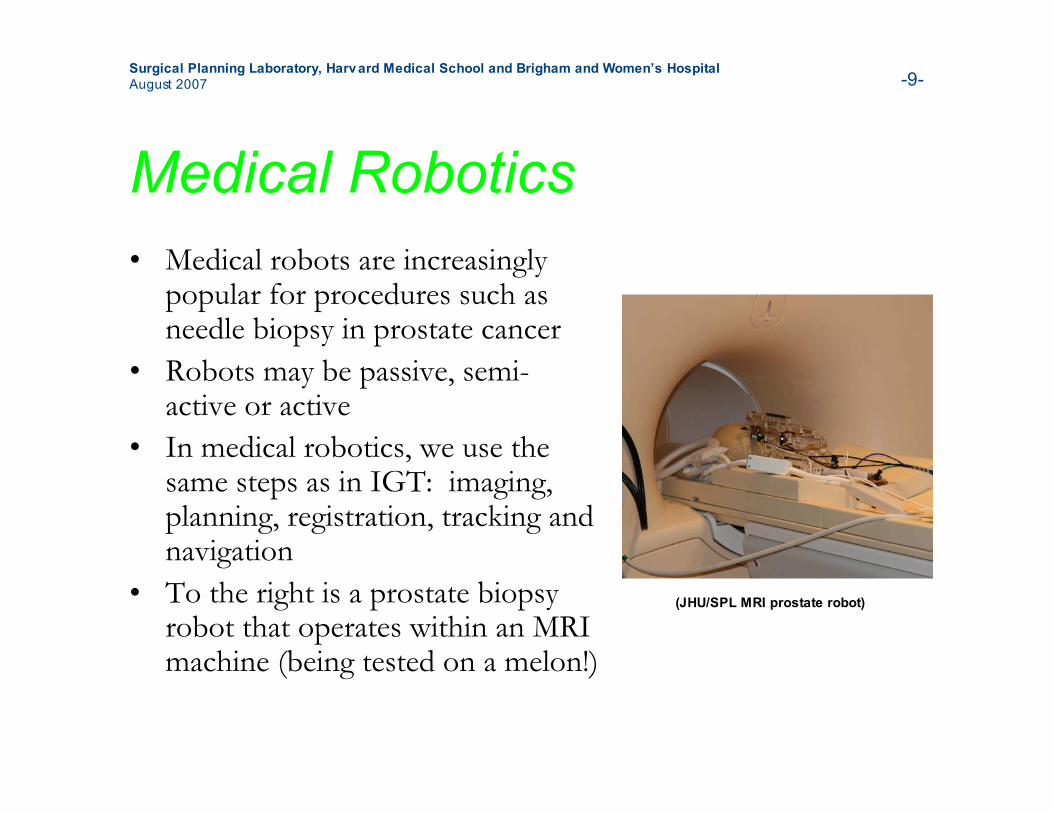
Medical Robotics• Medical robots are increasingly
popular for procedures such asneedle biopsy in prostate cancer
• Robots may be passive, semi-active or active
• In medical robotics, we use thesame steps as in IGT: imaging,planning, registration, tracking andnavigation
• To the right is a prostate biopsyrobot that operates within an MRImachine (being tested on a melon!)
(JHU/SPL MRI prostate robot)
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -10-
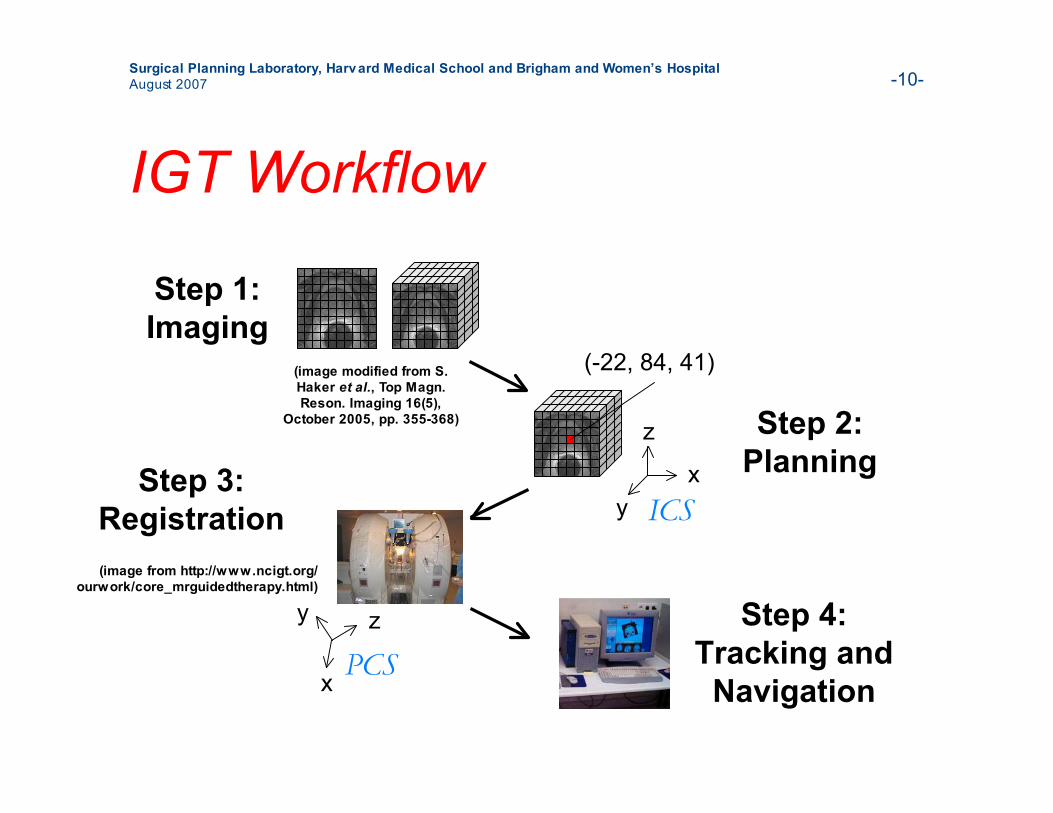
IGT Workflow
z
x
y
Step 1:Imaging
Step 2:PlanningStep 3:
Registration
Step 4:Tracking and
Navigation
(-22, 84, 41)
z
xy ICS
PCS
(image modified from S.Haker et al., Top Magn.Reson. Imaging 16(5),
October 2005, pp. 355-368)
(image from http://www.ncigt.org/ourwork/core_mrguidedtherapy.html)
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -11-
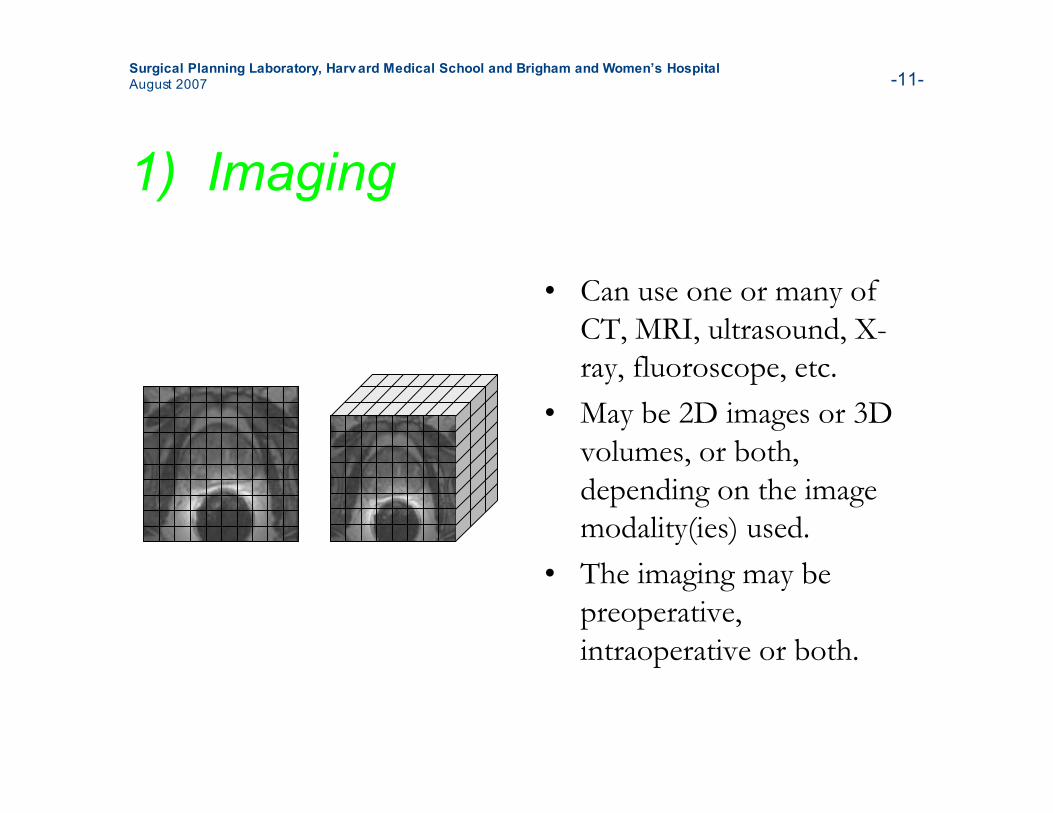
1) Imaging
• Can use one or many ofCT, MRI, ultrasound, X-ray, fluoroscope, etc.
• May be 2D images or 3Dvolumes, or both,depending on the imagemodality(ies) used.
• The imaging may bepreoperative,intraoperative or both.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -12-
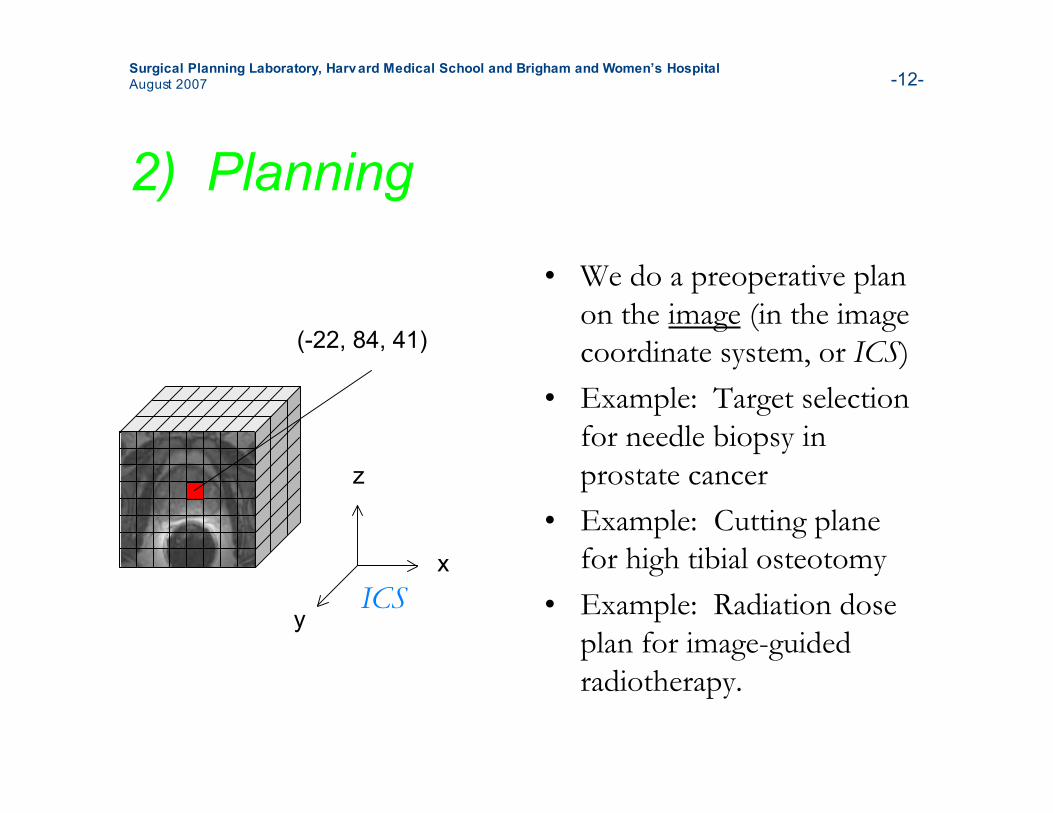
2) Planning
• We do a preoperative planon the image (in the imagecoordinate system, or ICS)
• Example: Target selectionfor needle biopsy inprostate cancer
• Example: Cutting planefor high tibial osteotomy
• Example: Radiation doseplan for image-guidedradiotherapy.
(-22, 84, 41)
z
x
yICS
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -13-
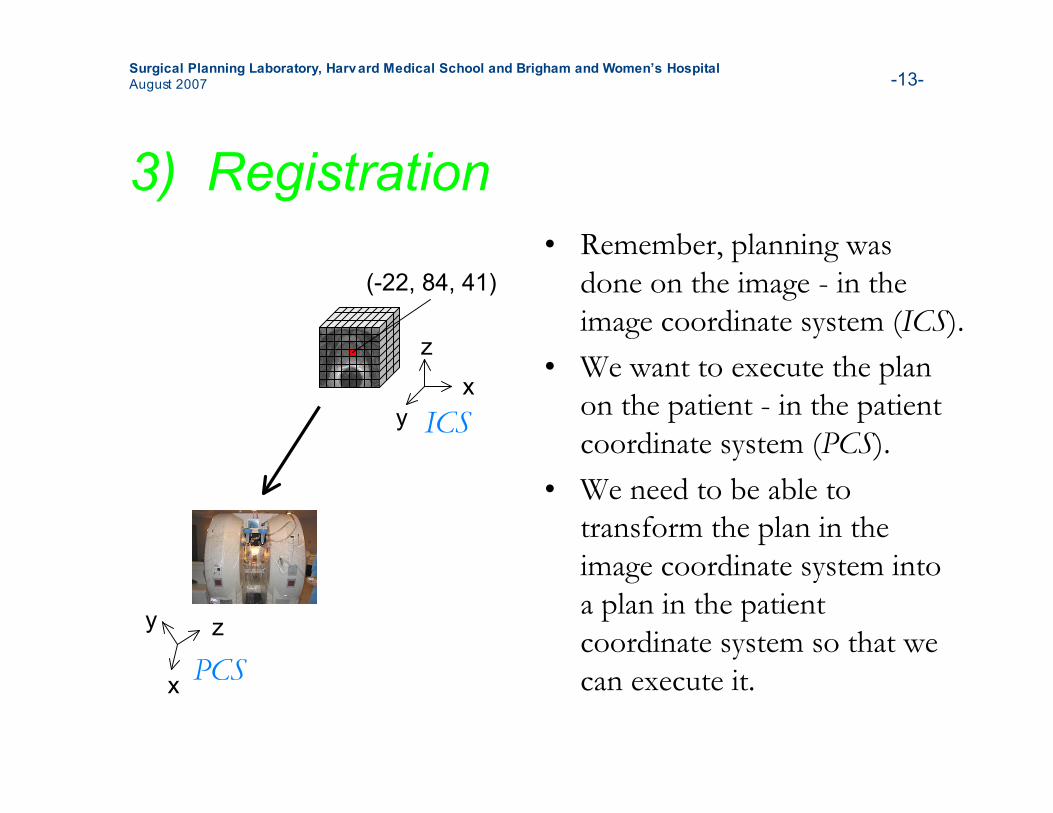
3) Registration• Remember, planning was
done on the image - in theimage coordinate system (ICS).
• We want to execute the planon the patient - in the patientcoordinate system (PCS).
• We need to be able totransform the plan in theimage coordinate system intoa plan in the patientcoordinate system so that wecan execute it.
z
x
y
(-22, 84, 41)
z
xy ICS
PCS
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -14-
3) Registration, continued
• The computational process of registrationdetermines the relationship between two coordinatesystems, such as that between the image coordinatesystem (ICS) and the patient coordinate system(PCS).
• Registration may also be performed betweenpreoperative and intraoperative images or volumes.Example: between preoperative 3D MRI andintraoperative 2D ultrasound.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -15-
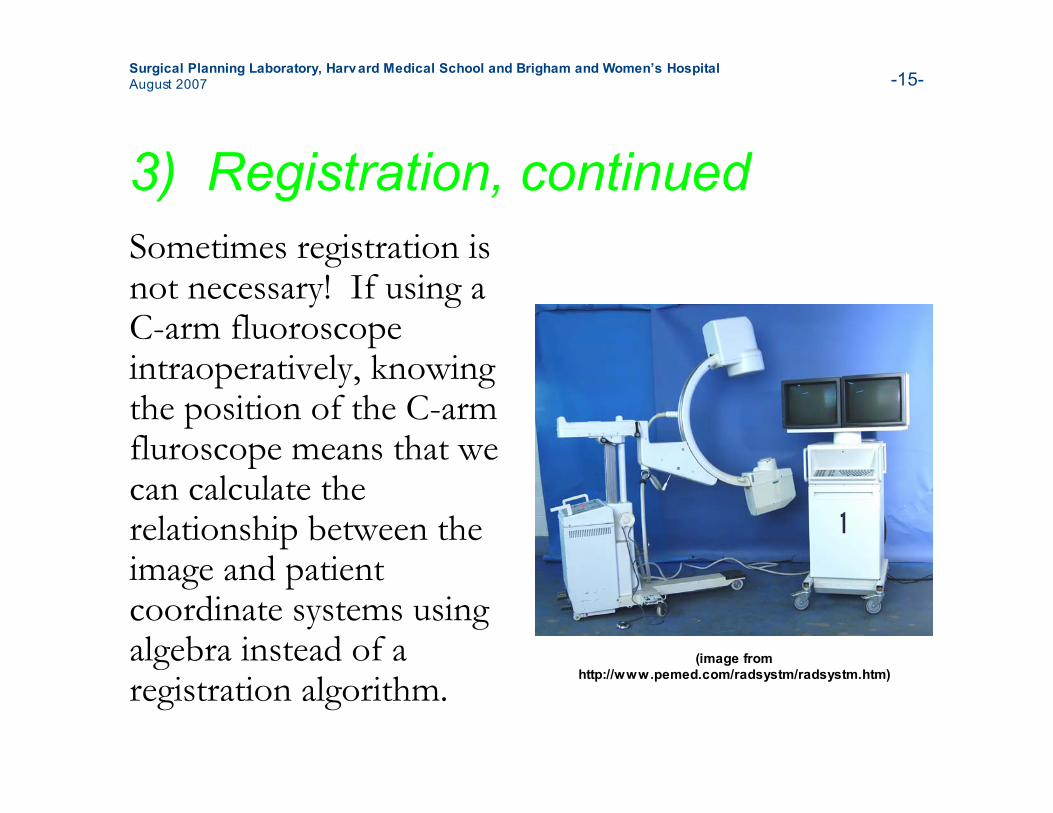
3) Registration, continuedSometimes registration isnot necessary! If using aC-arm fluoroscopeintraoperatively, knowingthe position of the C-armfluroscope means that wecan calculate therelationship between theimage and patientcoordinate systems usingalgebra instead of aregistration algorithm.
(image fromhttp://www.pemed.com/radsystm/radsystm.htm)
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -16-
3) Registration, continued
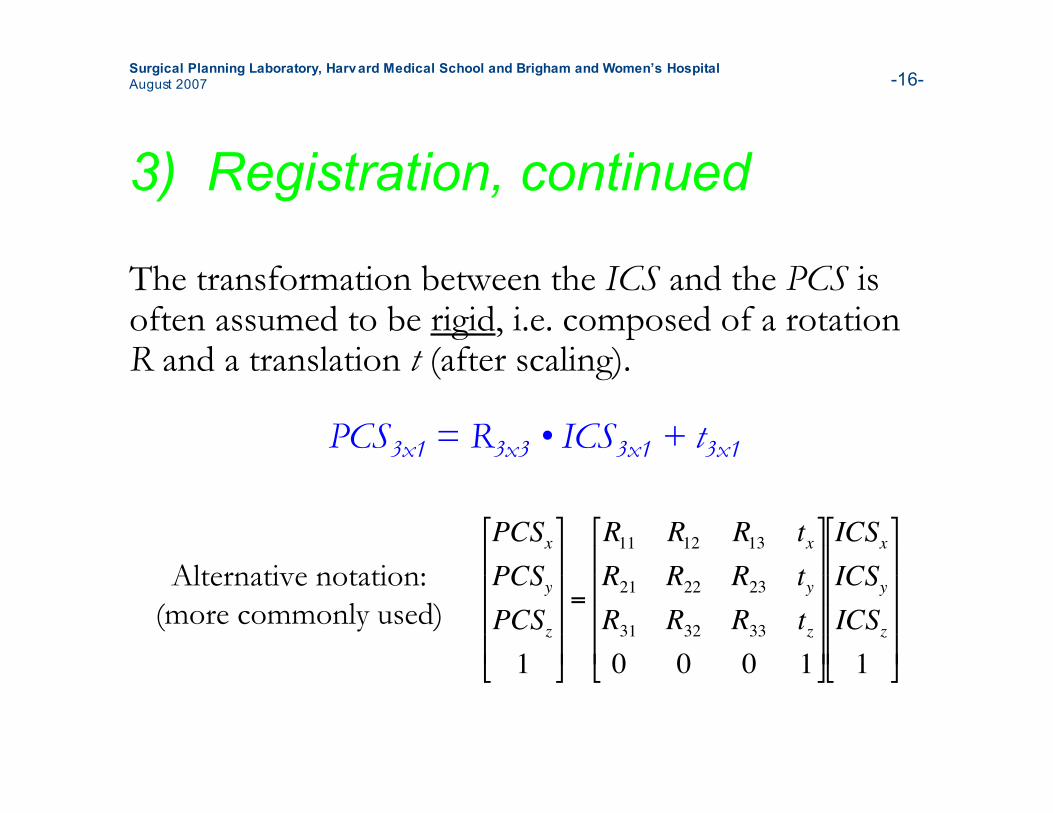
The transformation between the ICS and the PCS isoften assumed to be rigid, i.e. composed of a rotationR and a translation t (after scaling).
!
PCSx
PCSy
PCSz
1
"
#
$ $ $ $
%
&
' ' ' '
=
R11
R12
R13
tx
R21
R22
R23
ty
R31
R32
R33
tz
0 0 0 1
"
#
$ $ $ $
%
&
' ' ' '
ICSx
ICSy
ICSz
1
"
#
$ $ $ $
%
&
' ' ' '
PCS3x1 = R3x3 • ICS3x1 + t3x1
Alternative notation:(more commonly used)
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -17-
3) Registration, continued
• Various registration algorithms can work oncombinations of sets of points, images, volumesand surfaces
• Many rigid registration algorithms use a point-basedapproach: select a number of corresponding pointsin the two coordinate systems and use them to findR and t
• The points used in the registration are calledfiducials
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -18-
3) Registration, continued
• If performing registration between the imagecoordinate system and the patient coordinatesystem, one can:– Find points in the patient coordinate system using an
optical or magnetic camera and a pointing device– Select the corresponding points in the image coordinate
system either automatically or manually– Use an algorithm such as Iterative Closest Points (ICP)
to determine R and t.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -19-
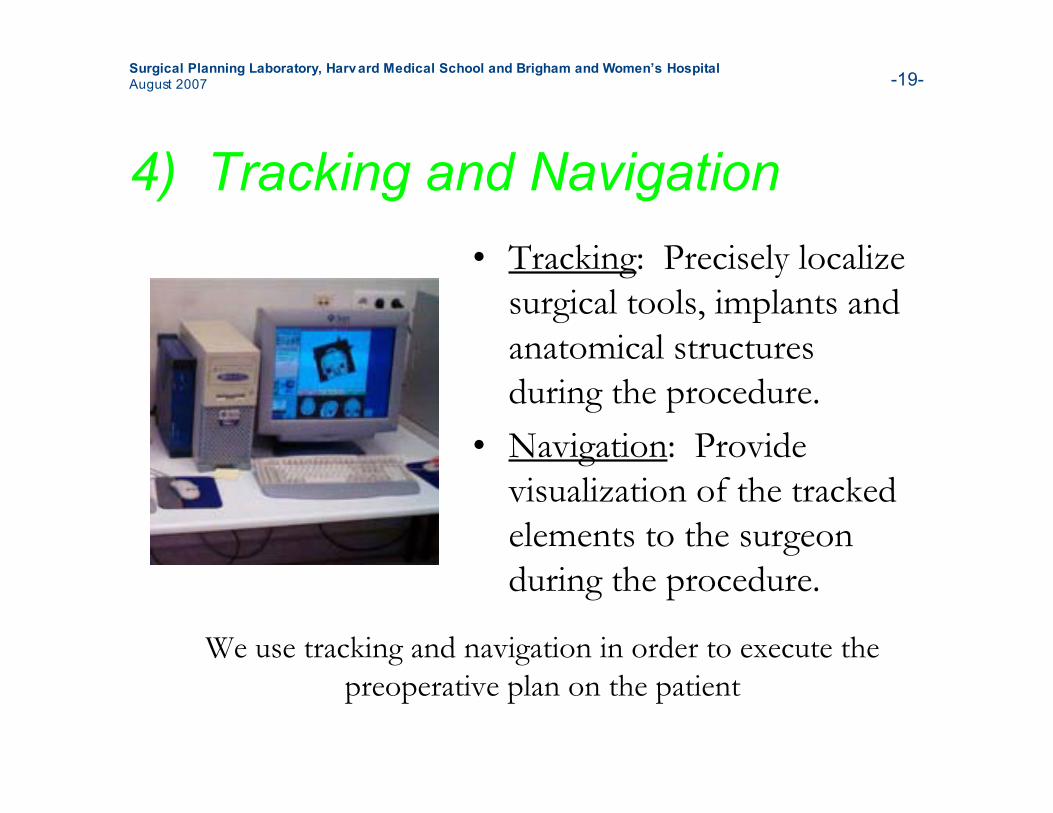
4) Tracking and Navigation• Tracking: Precisely localize
surgical tools, implants andanatomical structuresduring the procedure.
• Navigation: Providevisualization of the trackedelements to the surgeonduring the procedure.
We use tracking and navigation in order to execute thepreoperative plan on the patient
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -20-
PART II:Assemble Your
Tutorial Supplies
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -21-
Tutorial Supplies
To use this tutorial you will need: One LEGO Mindstorms NXT robotics kit One LEGO Deluxe Brick Box Two pom-poms CT volume of the phantom 3D Slicer LEGO tutorial module A Linux computer with root access Two sheets of white paper and tape Assembly instructions for the robot and phantom Phantom placement guide
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -22-
One LEGO Mindstorms NXTRobotics Kit
Available at:http://shop.lego.com/ByTheme/Product.aspx?p=8527&cn=17&d=70
Approximate cost:$249.99 USD + taxes and shipping
The tutorial robot that you will build will act as thesurgeon.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -23-
One LEGO Deluxe Brick Box
Available at:http://shop.lego.com/ByTheme/Product.aspx?p=6167&cn=306&d=362
Approximate cost:$44.99 USD + taxes and shipping
The phantom (anatomical model) that you will buildwill act as the patient.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -24-
Two Pom-Poms• diameter approximately 2.5 cm (1 inch)
Available at:http://www.amazon.com/PAC-1859614-Poms-ClassPack-Sizes/dp/B0006HXNRY/ref=sr_1_12/104-9511701-9925562?ie=UTF8&s=office-products&qid=1187791961&sr=8-12or at a local art or crafts store.
Approximate cost:$13.49 USD + taxes and shipping
The pom-poms on the phantom will act as the tumour targets.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -25-
CT Volume of the Phantom
Available at:<link>
The three-dimensionalimage volume of thephantom will act as thepreoperative image.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -26-
3D Slicer LEGO TutorialModule
Available at:www.slicer.org<link>
3D Slicer is a comprehensiveopen-source software package formedical image processing andimage-guided therapy. 3D Slicerwill act as the IGT software for allsteps of the procedure.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -27-
A Linux Computer with RootAccess
Make sure that you knowthe root password!
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -28-
Two Sheets of White Paperand Tape
Cut the pieces of paperso that you have fourpieces measuring 21.5 cmby 10 cm (8.5” by 4”)
These pieces of paperand the tape will be usedas part of the phantom.
21.5 cm
10 cm
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -29-
Assembly Instructions for theRobot and Phantom
Available at:<link>
These instructions willtell you how to build thetutorial robot andphantom.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -30-
Phantom Placement Guide
Available at:<link>
This guide will helpyou to to position therobot and thephantom correctlyduring the tutorial.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -31-
Setup for the tutorial
• Step 1: Install 3D Slicer• Step 2: Build the LEGO robot• Step 3: Build the phantom
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -32-
Step 1: Install 3D Slicer
• 3D Slicer is a sophisticated open-sourcesoftware package for research anddevelopment in medical image processingand image-guided therapy
• The image-guided therapy and medicalrobotics tutorial module was created in 3DSlicer version 3.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -33-
Step 1: Install 3D Slicer,continued
• <Instructions for how to install 3D Slicer gohere, once we know how it will bedistributed - exactly where the website willbe, links, etc>
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -34-
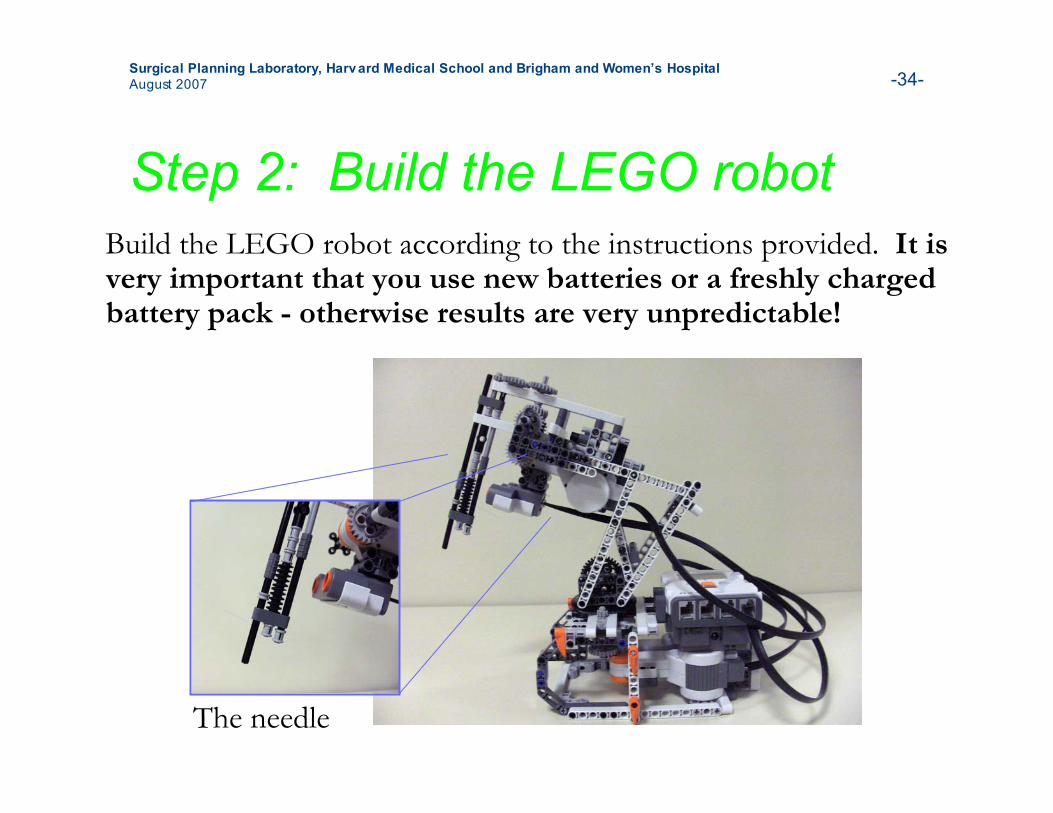
Step 2: Build the LEGO robotBuild the LEGO robot according to the instructions provided. It isvery important that you use new batteries or a freshly chargedbattery pack - otherwise results are very unpredictable!
The needle
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -35-
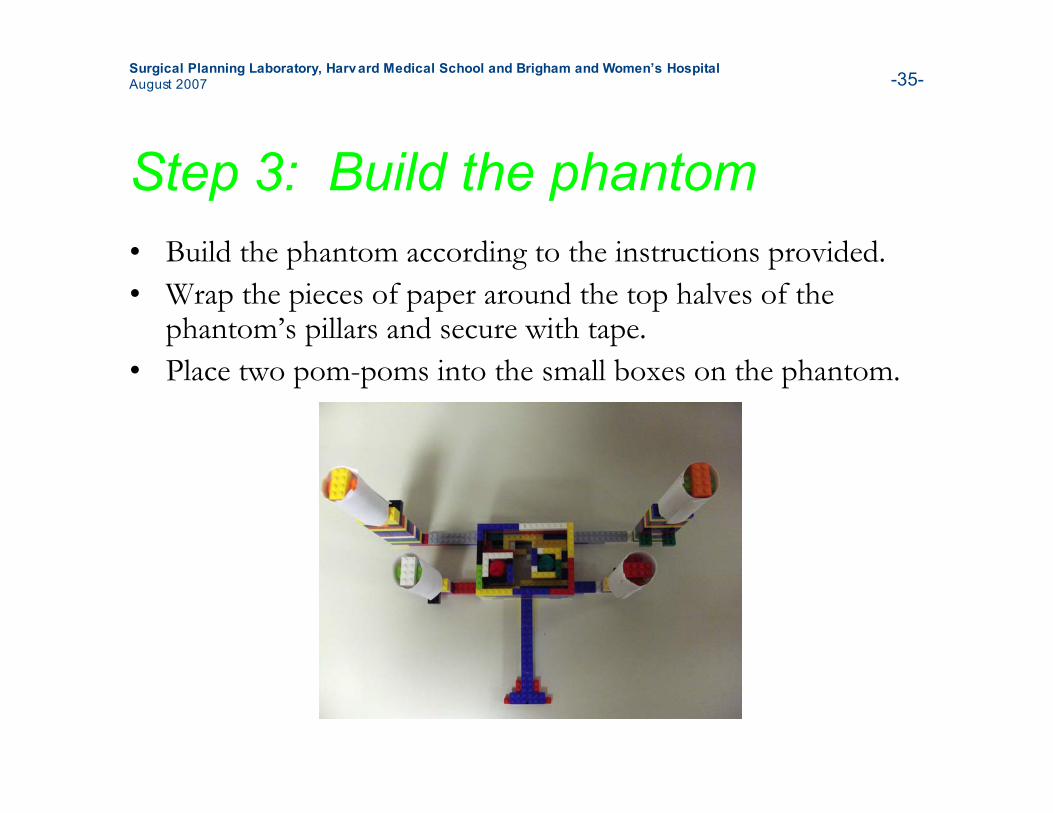
Step 3: Build the phantom• Build the phantom according to the instructions provided.• Wrap the pieces of paper around the top halves of the
phantom’s pillars and secure with tape.• Place two pom-poms into the small boxes on the phantom.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -36-
After completing this tutorialsection• You have learned about the steps of a typical
image-guided therapy or medical roboticsprocedure.
• You have learned about needle biopsy, theexample procedure used in this tutorial.
• You have assembled all of the tutorialsupplies and ready to begin the basic tutorial.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -37-
Additional references• Image-guided therapy is common in orthopedic (bone and
joint) surgery. You can investigate this exciting field andlearn more about the steps used in IGT and medicalrobotics by reading:• N. Sugano. Computer-assisted orthopedic surgery. Journal of
Orthopaedic Science, 8(3):442-448, 2003.• N.W.L. Schep, I.A.M.J. Broeders, and Chr. van der Werken.
Computer assisted orthopaedic and trauma surgery: State of the artand future perspectives. Injury, 34(4):299-306, 2003.
• Learn more about how medical robots have been used byreading:• K. Cleary and C. Nguyen. State of the art in surgical robotics:
Clinical applications and technology challenges. Computer AidedSurgery, 6(6):312-328, 2001.
Surgical Planning Laboratory, Harvard Medical School and Brigham and Women’s HospitalAugust 2007 -38-
Thanks to
• Terry Peters, Ph.D (Robarts Research Institute, Universityof Western Ontario)
• Steven Canvin (The LEGO Group)• Cory Walker (NXT++ Developer)• G. Wade Johnson (Device::USB Developer)• Steve Pieper, Ph.D (Surgical Planning Laboratory)• Haiying Liu (Surgical Planning Laboratory)• Junichi Tokuda, Ph.D (Surgical Planning Laboratory)• Christoph Ruetz (Surgical Planning Laboratory)• Philip Mewes (Surgical Planning Laboratory)• The entire LEGO Mindstorms community