Embed Size (px)
Citation preview

Image Processing and Computer Vision
Chapter 11: Bundle adjustment Structure reconstruction SFM
from N-frames
Bundle adjustment– structure reconstruction V4c 1

Reconstruction from N-frames
• Factorization (linear, fast, not too accurate)• Bundle adjustment (slower but more
accurate), can use factorization results as the first guess. – Non linear iterative methods are more accurate
than linear method, require first guess (e.g. From factorization).
– Many different implementations, but the concept is the same.
Bundle adjustment– structure reconstruction V4c 2

Problem definition
• There are N features in the 3D object .• We take pictures of the object at different
views.• Input :
• Image sequence I1,I2,…I .• Each image has n image feature points
• Output (structure=model, and motion=pose)• 3-D coordinates of all 3-D model points X1,X2,..,XN.• Camera pose for each image taken [R(t),T(t)] t=1,…
Bundle adjustment– structure reconstruction V4c 3

Example: Bundle adjustment 3D reconstruction (see also http://www.cse.cuhk.edu.hk/khwong/demo/index.html)
• Grand Canyon Demo• Flask• Robot
Bundle adjustment– structure reconstruction V4c 4
http://www.youtube.com/watch?v=2KLFRILlOjc
http://www.youtube.com/watch?v=4h1pN2DIs6g
http://www.youtube.com/watch?v=ONx4cyYYyrIhttp://www.youtube.com/watch?v=xgCnV--wf2k

The iterative SFM alternating bundle adjustment method
• Break down the system into two phases:--SFM1: find pose phase--SFM2: find model phase
• Initialize first guess of model – The first guess is a flat model perpendicular to the image
and is Zinit away (e.g. Zinit = 0.5 meters or any reasonable guess)
• Iterative while ( Err is not small )• {
– SFM1: find pose phase– SFM2: find model phase– Measurement error(Err) or(model and pose stabilized)
• }
Bundle adjustment– structure reconstruction V4c 5

SFM1 : find pose phase
Pose estimationdiscussed in the last chapter
Bundle adjustment– structure reconstruction V4c 6

SFM2: Model finding by the iterative method• Similar to pose estimation.
– In pose estimation: model is known, pose is unknown.
– Here (Model finding by the iterative method) Assume pose is known, model is unknown.
– The algorithms are similar.
Bundle adjustment– structure reconstruction V4c
7

Problem Formulation
•
Bundle adjustment– structure reconstruction V4c
8
N iT
iiiN i
,..,Γ,t
T
tiii,t
Tt,..,Γ,t
iiviii
iiii
iiuiii
iiii
i
Tiii
thTiiii
T
ZYXM
θ
vux
],T,T,T,φ,φ[φ θ
bMgTZrYrXr
TZrYrXrfv
aMgTZrYrXr
TZrYrXrfu
P
vuxiZYXM
TTT
TTTθR,T
,..2,1,..2,1
21
32132121
,3333231
2232221
,3333231
1131211
321
321
321321
Find
pose and frames imagegiven theFrom : taskSFM2
known. are tsmeasuremen image and
, pose theAsume
features N 1,2,...,iobject the
and frames, image,1,2, tare There :definition Problem
--------------------------chapter In this---------------
)2(),(
)2(),(
(1a),1(b) rewrite , ofpoint image the
is , N),1,2,(ipoint model theis
ly,respective axes ZY,X, around anglesrotation are ,,
y,repectivel axes ZY,X, along ons translatiare ,,
posefor Assume
:)estimation pose-iv10(chapter slides estimation pose theFrom

Derivation for the model partial derivatives
•
Bundle adjustment– structure reconstruction V4c
9
23111
112
31
11312
3333231
1131211
12
13
23
333231
232221
131211
312
123
3333231
1131211
321321
1
1
. Find
1
1
1
R
),,,,,,,,(Given
Ri
iRi
Ri
Ri
Ri
Ri
RiR
i
Ri
RiR
i
Ri
Ri
Ri
Ri
RiR
i
Ri
Ri
Ri
iii
iii
i
i
iii
iiiRi
Ri
iii
iii
iiiui
Z
Xr
Z
rf
Z
rf
Z
Xrf
Z
frXr
Zf
Z
f
X
XX
X
Z
Z
Zf
ZX
fXX
X
Zf
X
ZX
f
X
TZrYrXrTZrYrXr
f
X
u
X
u
rrr
rrr
rrr
TZYX
TZYXf
Z
Xf
TZrYrXr
TZrYrXrf
ZYXTTTgu
23212
122
32
12322
3333231
1131211
33132231
21331211
312
123
3333231
1131211
321321
1
1
. Find
1,,
,,1 so
),,,,,,,,(Given
Ri
iRi
Ri
Ri
Ri
Ri
RiR
i
Ri
RiR
i
Ri
Ri
Ri
Ri
RiR
i
Ri
Ri
Ri
iii
iii
i
i
iii
iiiRi
Ri
iii
iii
iiiui
Z
Xr
Z
rf
Z
rf
Z
Xrf
Z
frXr
Zf
Z
f
Y
XX
Y
Z
Z
Zf
ZY
fXX
Y
Zf
Y
ZX
f
Y
TZrYrXrTZrYrXr
f
Y
u
Y
u
rrr
rrr
TZYX
TZYXf
Z
Xf
TZrYrXr
TZrYrXrf
ZYXTTTgu

CMSC5711: Exercise11.1:
•
Bundle adjustment– structure reconstruction V4c
10
?
Find
1
1
1
R
,1,,
,,1 so
),,,,,,,,(Given
3333231
1131211
12
13
23
333231
232221
131211
33132231
21331211
312
123
3333231
1131211
321321
Z
Z
Xf
Z
TZrYrXr
TZrYrXrf
Z
u
rrr
rrr
rrr
orrrr
rrr
TZYX
TZYXf
Z
Xf
TZrYrXr
TZrYrXrf
ZYXTTTgu
Ri
Ri
iii
iii
i
iii
iiiRi
Ri
iii
iii
iiiui

Exercise11.2: proves all these partial derivatives
• Bundle adjustment– structure reconstruction V4c
11
23323
23222
23121
23313
23212
23111
Ri
iRii
i
Ri
iRii
i
Ri
iRii
i
Ri
iRii
i
Ri
iRii
i
Ri
iRii
i
Z
Yr
Z
rf
Z
v
Z
Yr
Z
rf
Y
v
Z
Yr
Z
rf
X
v
Z
Xr
Z
rf
Z
u
Z
Xr
Z
rf
Y
u
Z
Xr
Z
rf
X
u

Recall
•
Bundle adjustment– structure reconstruction V4c
12

Continue
•
Bundle adjustment– structure reconstruction V4c
13
)5(~
~
~
)~
,()~
,()~
,(
)~
,()~
,()~
,(
~
~
~
~
~
formmatrix ain put them (4b), and (4a) combine
-(4b)-)~
()
~,(
)~
()
~,(
)~
()
~,(
)~
,(
-(4a)-)~
()
~,(
)~
()
~,(
)~
()
~,(
)~
,(
~point model D-3 guessed a is
~~~~:point model for the known, are Assume
1332
,,
,,
,,
,..,1
ii
ii
ii
iviviv
iuiuiu
ii
ii
ii
Mii
ii
iiiv
iiiv
iiiv
ttivti
iiiu
iiiu
iiiu
itiuti
titi
iiii
tht
ZZ
YY
XX
Z
Mg
Y
Mg
X
MgZ
Mg
Y
Mg
X
Mg
ZZ
YY
XX
jvv
uue
ZZZ
MgYY
Y
MgXX
X
Mg
Mgv
ZZZ
MgYY
Y
MgXX
X
Mg
Mgu
uu
)Z,Y,X(M
i

continue
• Bundle adjustment– structure reconstruction V4c
14)7(*
~
~
~
,: model for theJacobain theSetup
)6(~
~
~
)~
,()~
,()~
,(
)~
,()~
,()~
,(:
)~
,()~
,()~
,(
)~
,()~
,()~
,(
~
~
~
:
~
~:
~
~
:
relationsmatrix stack the times,21 edpoint view model thehave weIf
)5(~
~
~
)~
,()~
,()~
,(
)~
,()~
,()~
,(
~
~
~
~
~
1332)(
12
1332
)(
1)(
)(
13
32
1
1332
)(
1)(
11
12
1332)()(
32)(
)(
12)(
13
12
MJE
ZZ
YY
XX
M
j
j
J
ZZ
YY
XX
Z
Mg
Y
Mg
X
MgZ
Mg
Y
Mg
X
Mg
Z
Mg
Y
Mg
X
MgZ
Mg
Y
Mg
X
Mg
ZZ
YY
XX
j
j
vv
uu
vv
uu
e
e
E
,,.Γ,ti
ZZ
YY
XX
Z
Mg
Y
Mg
X
MgZ
Mg
Y
Mg
X
Mg
ZZ
YY
XX
jvv
uue
m
ii
ii
ii
tm
tm
m
ii
ii
ii
t
iviviv
iuiuiu
t
iviviv
iuiuiu
ii
ii
ii
tm
tm
tii
ii
tii
ii
t
t
th
ii
ii
ii
t
iviviv
iuiuiu
tii
ii
iim
tii
iit

SFM2: Iteration for finding the model point i: In this algorithm each point i (i=1,2,..N) is found independently , so the following algorithm will be run N times.
• Bundle adjustment– structure reconstruction V4c
15
result theis ~
loop above theof end After the
}
~~ is guessNext
enough small is ifBreak
inverse pseudo use matrx, square anot is if // and E find
{
1max_0Iterate
*
findcan we,~
guessfirst on the Base
* so , *
1
1)(
1
0)(
0
0
1)(
k
kkk
k
km
k
-kk
km
k
k
T
-m
M
MMM
M
EJM
JJ
) k,kK,k (k
MJE
M
ZYXM
ΔMekJMJE
SFM2: This algorithm is to find the model M

The iterative SFM alternating bundle adjustment method
• Break down the system into two phases:--SFM1: find pose phase--SFM2: find model phase (method (A) or (B))
• Initialize first guess of model – The first guess is a flat model perpendicular to the image
and is Zinit away (e.g. Zinit = 0.5 meters or any reasonable guess)
• Iterative while ( Err is not small )• {
– SFM1: find pose phase– SFM2: find model phase – Measurement error(Err) small or model and pose stabilized
• }
Bundle adjustment– structure reconstruction V4c 16

Overall processing revisit
• Given: measurements – Images of N frames
• Point feature tracked by KLT Kanade–Lucas–Tomasi_feature_tracker or SURF (Speeded Up Robust Features) methods
• Examples, demo• http://www.youtube.com/watch?v=RXpX9TJlpd0
• To find pose (Rotation R, translation T ) of every frame, and the model structure X
Bundle adjustment– structure reconstruction V4c
17

Putting it altogether
Repeat the explanations SFM1 (find pose phase) and
SFM2 (find model phase) with implementation details.
Bundle adjustment– structure reconstruction V4c
18

Putting it altogether• Use KLT (or SIFT, Harris then correlation) to obtain features in [u,v]T
• There are t=1,2,…, image frames, • So there are t=1={R,T} t=1 , t=2={R,T} t=2 , …., t=={R,T} t= poses.
• There is only one model Mi=[X,Y,Z]I,with i=1,..,N features• Initialize first guess of model
– The first guess is a flat model perpendicular to the image and is Zinit away (e.g. Zinit = 0.5 meters or any reasonable guess)
• Iterative while ( Err is not small ){– /////////////// SFM1: Pose finding ////////////////////////////////////– //(for every time frame t, use all N features, run SFM1 once); so SFM1 runs times here– For (t=1; t<; t++) – { Inputs: You have f(focal length), Mi=[X,Y,Z]i
– For each frame t, you have i=1,,,N, image feature points and measurements [u,v] Ti,t
– Output: pose t
– }
– After the above is run– t=1={R,T} t=1 , t=2={R,T} t=2 , …., t=={R,T} t= poses are found– ////////////////////// SFM2: model finding //////////////////////– (For i=1,i<N;i++) (for every feature, use all frames, run SFM2 once; so SFM2 runs N times here)
• {SFM2: find model phase}– Measurement error(Err) small or model and pose stabilized}
Bundle adjustment– structure reconstruction V4c
19

Recall: SFM1:Find Pose phase//(for every time frame t, use all N features, run SFM1 once); so SFM1 runs times here For (t=1; t<; t++){ Inputs: You have f(focal length), Mi=[X,Y,Z]i
For each frame t, you have i=1,,,N, image feature points and measurements [u,v]T
i,t}
Output: pose t
}
After the above is runt=1={R,T} t=1 , t=2={R,T} t=2 , …., t=={R,T} t= poses are foundBundle adjustment– structure
reconstruction V4c20

Recall in pose estimation SFM1: a slide in ch.iv10: pose estimation
Bundle adjustment– structure reconstruction V4c
21
)7(*
~
~
~
~
~
~
,:Jacobain Put the
)6(
~
~
~
~
~
~
0
0
:
0
0
~
~
~
~
~
~
:
~
~:
~
~
:
relationsmatrix stack the N,,1,i points, encecorrespond N have we t,frameeach For
166212
33
22
11
33
22
11
62
1
1633
22
11
33
22
11
62
222
222
1
222
222
12
1633
22
11
33
22
11
62
1
12
11
11
12
1
12
16
NN
NNi
i
NNi
Ri
Ri
Ri
Ri
i
Ri
iR
i
Ri
Rii
Rii
Ri
Ri
Ri
Ri
i
Ri
Rii
Rii
Ri
Rii
i
Ri
Ri
Ri
Ri
i
Ri
iR
i
Ri
Rii
Rii
Ri
Ri
Ri
Ri
i
Ri
Rii
Rii
Ri
Rii
N
NNi
i
NNiNi
NiNi
ii
ii
NNi
i
N
JE
TT
TT
TTj
j
J
TT
TT
TT
Z
Yf
Z
f
Z
Xf
Z
XYf
Z
ZZYYf
Z
Xf
Z
f
Z
Yf
Z
ZZXXf
Z
XYf
Z
Yf
Z
f
Z
Xf
Z
XYf
Z
ZZYYf
Z
Xf
Z
f
Z
Yf
Z
ZZXXf
Z
XYf
E
TT
TT
TTj
j
vv
uu
vv
uu
e
e
E
•
At time t, there are N features
• The formulas apply to one frame at time t. There are i=1,2,…N features.
• each time t, t is found.• SFM1 will times, each
time is independent.

Exercise• Exercise 11.3 : If the model is a
checker board plane, each square is 1cm2.. It is perpendicular to the camera principal axis and at Z=0.5 meters away from the camera center. Pixel width is 5um.
• Find the 3D positions of X1,X2,X3 and X4 in pixels
•
Bundle adjustment– structure reconstruction V4c
22
x3=[0,0]
X1
X41cm
X2
1cm
Y
X

How to get the first guess of the model?
• We have an image with [u,v]i=1,2,..,N
• Camera focal length is f• In theory
– ui=f*Xi/Zi
– vi=f*Yi/Zi
• First guess of the model is all points on a plane • X’i=ui*Zguess/f, Y’i=vi*Zguess/f,
• Z’i=Zguess=0.5 meters (for example)
• So the guessed i-th 3D point is at [X’I, Y’I, Z’i]Bundle adjustment– structure
reconstruction V4c
23
Image
Camera center
Zguessf

Exercise 11.4 Revision for pose estimation SFM1: : Point out which are know variables and unknown variables in this page.
Bundle adjustment– structure reconstruction V4c
24
•
At time t, there are N features
• The formulas apply to one frame at time t. There are i=1,2,…N features.
• each time t, t is found.• SFM1 will times, each
time is independent.
)7(*
~
~
~
~
~
~
,:Jacobain Put the
)6(
~
~
~
~
~
~
0
0
:
0
0
~
~
~
~
~
~
:
~
~:
~
~
:
relationsmatrix stack the N,,1,i points, encecorrespond N have we t,frameeach For
166212
33
22
11
33
22
11
62
1
1633
22
11
33
22
11
62
222
222
1
222
222
12
1633
22
11
33
22
11
62
1
12
11
11
12
1
12
16
NN
NNi
i
NNi
Ri
Ri
Ri
Ri
i
Ri
iR
i
Ri
Rii
Rii
Ri
Ri
Ri
Ri
i
Ri
Rii
Rii
Ri
Rii
i
Ri
Ri
Ri
Ri
i
Ri
iR
i
Ri
Rii
Rii
Ri
Ri
Ri
Ri
i
Ri
Rii
Rii
Ri
Rii
N
NNi
i
NNiNi
NiNi
ii
ii
NNi
i
N
JE
TT
TT
TTj
j
J
TT
TT
TT
Z
Yf
Z
f
Z
Xf
Z
XYf
Z
ZZYYf
Z
Xf
Z
f
Z
Yf
Z
ZZXXf
Z
XYf
Z
Yf
Z
f
Z
Xf
Z
XYf
Z
ZZYYf
Z
Xf
Z
f
Z
Yf
Z
ZZXXf
Z
XYf
E
TT
TT
TTj
j
vv
uu
vv
uu
e
e
E

Exercise 11.5 Revision for pose estimation SFM1: : Explain why E is known here in the following formula.
Bundle adjustment– structure reconstruction V4c
25
1633
22
11
33
22
11
62
1
12
11
11
12
1
12
~
~
~
~
~
~
:
~
~:
~
~
:
relationsmatrix stack the N,,1,i points, encecorrespond N have weIf
TT
TT
TTj
j
vv
uu
vv
uu
e
e
E
NNi
i
NNiNi
NiNi
ii
ii
NNi
i
N
•

Revision for pose estimation SFM1: Explain why J is known here.Answer: because guessed M, and guessed pose are known
• 626
6
3
3
6
1
6
1
2
1
2
1
1
1
1
1
),~
(
),~
(
:::::
::::::
:::),
~(
),~
(
::
::::::
),~
(
),~
(
:::),
~(
),~
(
),~
(
),~
(
N
Niv
Niu
Iiv
Iiu
iv
iu
v
u
v
u
Mg
Mg
Mg
Mg
Mg
Mg
Mg
Mg
Mg
Mg
J
Bundle adjustment– structure reconstruction V4c 26

Exercise 11.6 : Revision for pose estimation SFM1: Identify known variables and unknown variables when k=0 and k=5 in this iterative pose estimation algorithm
• Bundle adjustment– structure
reconstruction V4c27
}
~~ is guessNext
enough small is ifBreak
)~
(
inverse pseudo use no if // )~
( and find
{
1max_0Iterate
*)~
(
findcan we,~
guessfirst on the Base
* so
, *
1
10
110
01
00
0
321321
1
kkk
k
kkk
-kk
kkk
k
T
-
EJ
JJE
) k,kK,k (k
EJ
TTT
ΔθEJ
JE
6233
22
11
33
22
11
321321
321321
~
~
~
~
~
~pose guessed
~
~,
~,
~,
~,
~,
~~find want to that wepose theis
,,,,,
:
NTT
TT
TT
TTT
TTT
Note
• The formulas apply to one frame at time t. There are i=1,2,…N features.
• SFM1 will times, each time is independent,
SFM1: This algorithm is to find the pose

SFM2: Find model phaseSimilar to SFM1 but pose is known, find model here.
(for every feature, use all frames, run SFM2 once; so SFM2 runs N times here) For i=1,i<N;i++
{ SFM2: find model phase}
Bundle adjustment– structure reconstruction V4c
28

Exercise11.7: Revision of SFM2: Identify which are known which are known here. Explain why J(m) is known at this stage.
•
Bundle adjustment– structure reconstruction V4c
29)7(*
~
~
~
,: model for theJacobian Put the
)6(~
~
~
)~
,()~
,()~
,(
)~
,()~
,()~
,(:
)~
,()~
,()~
,(
)~
,()~
,()~
,(
~
~
~
:
~
~:
~
~
:
21for relationsmatrix stack the ,21 i.e. frames, have weIf
)5(~
~
~
)~
,()~
,()~
,(
)~
,()~
,()~
,(
~
~
~
~
~
1332)(
12
1332
)(
1)(
32)(
13
32
1
1332
)(
1)(
12
1
12
1
)(
,,
,,
MJE
ZZ
YY
XX
M
j
j
J
ZZ
YY
XX
Z
Mg
Y
Mg
X
MgZ
Mg
Y
Mg
X
Mg
Z
Mg
Y
Mg
X
MgZ
Mg
Y
Mg
X
Mg
ZZ
YY
XX
j
j
vv
uu
vv
uu
e
e
E
,..Γ,t,Γ,tΓ
ZZ
YY
XX
Z
Mg
Y
Mg
X
MgZ
Mg
Y
Mg
X
Mg
ZZ
YY
XX
jvv
uue
m
ii
ii
ii
tm
tm
m
ii
ii
ii
t
iviviv
iuiuiu
t
iviviv
iuiuiu
ii
ii
ii
im
im
tii
ii
tii
ii
t
t
ii
ii
ii
t
iviviv
iuiuiu
tii
ii
iim
titi
titi
• The formulas apply to one feature (i) for all time frames t=1,2,….
• SFM2 will N times , each time is independent.
• See next slide for the graphical illustration,
Measured
Result from the guessed model and given pose
JacobianCurrent Guessed model
New Guessed model

In SFM2, we handle a feature i, at one time.
• The formulas in the pervious slide apply to one feature (i) for all time farmes t=1,2,…
Bundle adjustment– structure reconstruction V4c
30
…
Camera motionOt=camera center at time t
Imaget=1
Imaget=2 Image
t=3Imaget=
…
v1
v2v3
vm
X
[u,v] i,t=2
[u,v]i,t=1
[u,v] i,t=3 [u,v] i,t= Ot=1
t=1={R,T} t=1
t=2={R,T} t=2
t=3={R,T} t=3
t=={R,T} t=
Ot=2
Ot=3
Ot=

Exercise11.8 : SFM2: Algo. to find the i-th model point (repeat this N times to get all N points)
Identify which are known and unknown when K=0, K=5
• Bundle adjustment– structure reconstruction V4c
31
result theis ~
loop above theof end After the
}
~~~ is guessNext
enough small is ifBreak
inverse pseudo use square,not is if // and E find
{
1max_0Iterate
*
findcan we,~
guessfirst on the Base
* so , *
1
1)(
1
0)(
0
0
1)(
k
kkk
k
km
k
-kk
km
k
k
T
-m
M
MMM
M
EJM
JJ
) k,kK,k (k
MJE
M
ZYXM
ΔMekJMJE
SFM2 previous by the found model
~ iterativeat plane a
~model Guessed]
~,
~,
~[
~find want to wemodel theis
unknwon],,[
~
~
~:
_
0_
kati
thkati
Tiiii
i
Tiiii
ii
ii
ii
M
kM
ZYXM
M
ZYXM
ZZ
YY
XX
M
Note
• The formulas apply to one feature (i) for all time frames t=1,2,….
• SFM2 will N times , each time is independent.
• See next slide for the graphical illustration,
SFM2: This algorithm is to find the model M

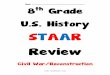
From [2] Result for rotation angles
Bundle adjustment– structure reconstruction V4c 32

From [2] Result for translations
Bundle adjustment– structure reconstruction V4c 33

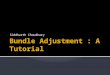
From [2] Result: compare full/classical(+) and 2-pass algorithm (o)
Bundle adjustment– structure reconstruction V4c 34

From [2] Results for real images
Bundle adjustment– structure reconstruction V4c 35

Conclusions
• Bundle adjustment can be used for structure and motion SAM (model structure reconstruction and pose estimation).
• Bundle adjustment is an accurate method for Structure from motion SFM.
• It can made more efficient by using a two pass (pose finding step, model fining step) algorithm
Bundle adjustment– structure reconstruction V4c 36

Appendices
Bundle adjustment– structure reconstruction V4c 37

Demo Newton's method• function new_x=demo_newton1(x)• %This is to solve x^3-2x=3 • %assume x is the guessed x• % 3= f(true_x)=f(x)+f'(x)(new_x-x)+ small_terms_ignored % Taylor
series • % 3-f(x)/f'(x)=new_x-x, or• % new_x=x+((3-f(x))/f'(x))= new_x, until new_x not changed• % so that• % new_x=x+((3-f(x))/f'(x))• % new_x=x+((3-(x^3-2*x))/(3*x^2-2));• while (1)• new_x=x+((3-(x^3-2*x))/(3*x^2-2));• err=abs(x - new_x);• st=sprintf('new_x=%2.3f,err=%2.3f, err is still too big\
n',new_x,err);• disp(st);• if (err < 0.01) • break;• end• %'err still big, hit key to continue'• pause• x=new_x;• end• 'err is small new_x is the solution'• new_x
• >> demo_newton1(1)• new_x=5.000,err=4.000, err is still too big
• new_x=3.466,err=1.534, err is still too big
• new_x=2.534,err=0.931, err is still too big
• new_x=2.059,err=0.475, err is still too big
• new_x=1.909,err=0.150, err is still too big
• new_x=1.893,err=0.015, err is still too big
• new_x=1.893,err=0.000, • ans =• err is small new_x is the solution• new_x =• 1.8933• ans =• 1.8933
Bundle adjustment– structure reconstruction V4c
38

Rotation matrix
•
Bundle adjustment– structure reconstruction V4c
39
sosmall, are ,,when ,
1
1
1
R
small are ,, when Also,
1)det(,,
))cos(cos())cos(sin( +))sin()sin(cos())sin(sin( + ))cos()sin(cos(-
))cos(sin(-))cos(cos( +))sin()sin(sin(-))sin(cos( + ))cos()sin(sin(
)sin())sin(cos(-))cos(cos(
321
12
13
23
333231
232221
131211
321
31
213132131321
213132131321
23232
333231
232221
131211
rrr
rrr
rrr
RIRRRR
And
rrr
rrr
rrr
TT

Jacobian for model :JacobM% Jacobian for model :JacobM %%%%%%%%•N = size(model,2); %model=3,N•if N~=1• error('JacobM: model size must be 4*1');•end•T = size(rt,3); %rt=3,4,T•J=zeros(2*T,3);
•for t=1:T %index T vertical blocks• V = rt(:,:,t)*model;• X = V(1,:);• Y = V(2,:);• Z = V(3,:);• Z2 = Z.*Z;• XZ2 = X./Z2;• YZ2 = Y./Z2;• a11 = rt(1,1,t)./Z - rt(3,1,t).*XZ2;• a12 = rt(1,2,t)./Z - rt(3,2,t).*XZ2;• a13 = rt(1,3,t)./Z - rt(3,3,t).*XZ2;• a21 = rt(2,1,t)./Z - rt(3,1,t).*YZ2;• a22 = rt(2,2,t)./Z - rt(3,2,t).*YZ2;• a23 = rt(2,3,t)./Z - rt(3,3,t).*YZ2;• a1 = [a11' a12' a13'];• a2 = [a21' a22' a23'];• • J(t,:) = a1;• J(T+t,:) = a2;•end•J = flen.*J; Bundle adjustment– structure reconstruction V4c 40

Angles and R pose conversion
3 2
3 1
2 1
_ _ _ ,
1
1
1
When angles are small
R
Bundle adjustment– structure reconstruction V4c 41
11 12 13
21 22 23
31 32 33
cos( )*cos( ) cos( )*sin( )*sin( ) sin( )*cos( ) cos( )*sin( ) sin( )*sin( )
sin( )*cos( ) sin *sin *sin cos sin( )*sin( )*cos( ) cos( )*sin( )
sin( ) cos sin cos(
r r r
R r r r
r r r
) *cos( )

jacobian for chang,wong ieee_mm 2 pass lowe
• '==========test jacobian for chang,wong ieee_mm 2 pass lowe=================='• clear• % a1=yaw, a2=pitch, a3=roll,• % t1=translation in x, t2=translation in y, t3=translation in z, • syms R dR M TT XYZ ZZ x y z f u v a1 a2 a3 t1 t2 t3 aa1 aa2 aa3 tt1 tt2 tt3
• R=[1 -aa3 aa2• aa3 1 -aa1• -aa2 aa1 1];• dR=[1 -a3 a2• a3 1 -a1• -a2 a1 1];
• M=[x;y;z];• TT=[tt1;tt2;tt3];• dt=[t1;t2;t3]• % XX=(dR.*R)*M+TT; %not correct, becuase R is a matrix multiplication transform• XYZ=dR*R*M+TT+dt; %correct, becuase R is a matrix multiplication transform• % XX=(dR+R)*M+TT; %not correct becuase R is not an addition transform• u=f*XYZ(1)/XYZ(3);• v=f*XYZ(2)/XYZ(3);• %diff (u,a3)• %diff (v,a3)• ja=jacobian([u ;v],[a1 a2 a3])• jt=jacobian([u ;v],[t1 t2 t3])Bundle adjustment– structure reconstruction V4c 42

Delaunay algorithm for generation of VRML files
• VRML specifications– Viewers
• Cortona3d, Cosmoplayer, Vivaty• http://cic.nist.gov/vrml/vbdetect.html
• Delaunay algorithm
Bundle adjustment– structure reconstruction V4c 43

Alternative method fro finding the model
• To find model by triangulation (not iterative method )
• It is faster but may be not very accurate.
Bundle adjustment– structure reconstruction V4c
44

Alternative method for SFM2 : find model phase
There are two methods:(SFM2: method A) Direct triangulation(SFM2: method B) Iterative method (in the main body of this power point)Either (A) or (B) can be used
Bundle adjustment– structure reconstruction V4c 45

SFM2(method A): direct triangulation model finding procedure
• Assume you have m views, • Using the first view and each of the other views we can (m-1)pairs of images. • Each pair gives one version of X (using the triangulation method in the chapter
on stereo (chapter iv08 http://www.cse.cuhk.edu.hk/%7Ekhwong/www2/cmsc5711/iv08_stereo.ppt)
• So you have m-1 models X1, X2,… Xm-1 (all referring to the first camera coordinate system as reference)
• The solution X=Xmean is the mean of all these (X1, X2,… Xm-1 ) • So a temporally model X is found at this stage.
– Also measure the error:– Measurement error (Err)– Err=||(current model - previous model)||2
Bundle adjustment– structure reconstruction V4c 46

SFM2 (method B) :The iterative steps
• Initialize first guess of model and pose• The first guess is a flat model perpendicular to the image and is
Zinit away (e.g. Zinit = 0.5 meters or any reasonable guess)• Iterative while ( Err is small)• {
– SFM1 find pose– SFM2 find model– Measurement error (Err)– Err= ||(current model - previous model)||2
– //If the model is stabilized, the solution is final.• }
Bundle adjustment– structure reconstruction V4c 47

Pose estimation result• Recall of SFM1 (pose estimation)
– Input : • Image sequence I1,I2,…Im.• There are N features in the 3D object .• Each image has n image feature points
– Output: pose [R(t),T(t)] t=1,…m
– At time t, each image feature will give you a vector vt from the camera center O(t) to the 3D point in X passing the image point xi,t
TTTTTRθ , findingfor Posefound 321321
Bundle adjustment– structure reconstruction V4c 48
Xi in 3D
Xi,t=[ui,vi]tT
Camera center O(t)
vt
Image

After pose is found in SFM1• We can use triangulation to find the model• Example fro an 3D feature X• After pose estimation SFM1, v1,v2,vm can be found• 0t=camera centers at time t• R(t),T(t)=pose at time t
Bundle adjustment– structure reconstruction V4c49
…
Camera motion
Imaget=1
Imaget=2 Image
t=3Imaget=m
…
v1
v2v3
vm
X
[u,v]2
[u,v]1
[u,v]3
[u,v]m
O1
O2
O3
Om
R2,T2R3,T3
Rm,Tm
R1,T1

SFM2(method A): From vectors find the closes point
• So you have v1,v2,..vm vectors in 3D• You want to find a point closes to this point• So hew to find the closest point between 2 vectors? Of
the first sand second views– Recall: we learned this in stereo vision– We know
• P1,P2 (projection matrices) of two cameras, (yes we know it here because we have guess solution R,T)
• We know the 2D correspondences points (yes we know it here) • We can find the model point X in 3D .
Bundle adjustment– structure reconstruction V4c 50

SFM2(method A): Just concentrate on the first two views
• Find X from 2 views– From RT found (SFM1 pose
finding phase), we have P1,P2.
– We also have 2D point correspondences: [u,v]1,[u,v]2
– We can find X, see the next two slides
Bundle adjustment– structure reconstruction V4c 51
Imaget=1
Imaget=2
v1
v2
X
[u,v]2
[u,v]1
O1
O2
R2,T2
R1,T1
Projection matrixP1
Projection matrixP2

SFM2(method A): Recall: Triangulation to find X
•
Bundle adjustment– structure reconstruction V4c52
X is the point at a minimum distance between two vectors{O1,(x1,y1)} and {O2,(x2,y2)}
O2
Ol
Left Frame plane1 1
e1e2
Left epipolar line
F
(x2,y2)
(x1,y1)
Epipole e1Epipole e2Focal
length=f1
Focal length=f2

SFM2(method A): Recall:3D reconstruction: from P1 and P2 find 3D points X by
triangulation (p.312[1A],p297[1B])
•
1][appendix SVDby solve,0A
cameras 2for and use , ofrow
)(0)()(
)(0)()(
)(0)()(
0
cameras 2for ,
22
322
12
322
21
311
11
311
21
12
23
13
1111
212211
TT
TT
TT
TT
thiT
TT
TT
TT
ppy
ppx
ppy
ppx
),P(P(ii)(i)Pip
iiipypx
iippy
ippx
ions_manipulatafter_some
Pxxx
),P(PPxPx
Bundle adjustment– structure reconstruction V4c 53
34
33
32
31
3
24
23
22
21
2
14
13
12
11
1
141312111
3
2
1
44333231
24232221
14131211
)43(
,,
, i.e.
P of row where
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
ppppP
iP
P
P
P
pppp
pppp
pppp
P
T
thiT
T
T
T
x

References
1. D.G. Lowe, “Fitting Parameterized Three-Dimensional Models to Images”, IEEE Pattern Analysis and Machine Intelligence, Volume: 13 Issue: 5 , May 1991 Page(s): 441 -450
2. Michael Ming Yuen Chang and Kin Hong Wong, "Model reconstruction and pose acquisition using extended Lowe's method", IEEE Transactions on Multimedia, Volume: 7, Issue: 2, April 2005.Bundle adjustment– structure
reconstruction V4c54

Answers
•
Bundle adjustment– structure reconstruction V4c
55

Answer11.1: Exercise11.1:
•
Bundle adjustment– structure reconstruction V4c
56
233133333231
1131211
33132231
21331211
312
123
3333231
1131211
321321
Find
1,,
,,1 so
),,,,,,,,(Given
Ri
iRi
Ri
Ri
iii
iii
i
iii
iiiRi
Ri
iii
iii
iiiui
Z
Xr
Z
rf
Z
Z
Xf
Z
TZrYrXr
TZrYrXrf
Z
u
rrr
rrr
TZYX
TZYXf
Z
Xf
TZrYrXr
TZrYrXrf
ZYXTTTgu

Answer11.2: Exercise11.2: proves all these partial derivatives: Left for students’ exercises
• Bundle adjustment– structure
reconstruction V4c57
23323
23222
23121
23313
23212
23111
Ri
iRii
i
Ri
iRii
i
Ri
iRii
i
Ri
iRii
i
Ri
iRii
i
Ri
iRii
i
Z
Xr
Z
rf
Z
v
Z
Xr
Z
rf
Y
v
Z
Xr
Z
rf
X
v
Z
Xr
Z
rf
Z
u
Z
Xr
Z
rf
Y
u
Z
Xr
Z
rf
X
u

Exercise• Answer 11.3: Exercise 11.3 : If the model is
a checker plane, each square is 1cm2.. It is perpendicular to the camera principal axis and at Z=0.5 meters away from the camera center. Pixel width is 5um.
• Find the 3D positions of X1,X2,X3 and X4 in pixels
• Answer:• All Z are the same
Z=0.5meters/5um=100,000• X1(-2cm, -2cm,0.5 meters)= [-4000,-
4000,100,000]• X2(-2cm, -1cm,0.5 meters)=[-4000,-
2000,100,000]• X3(0,0,0.5 m)=[0,0,100,000]• X4(2cm,2cm,0.5m)=[4000,4000,100,000]
•
Bundle adjustment– structure reconstruction V4c
58
x3=[0,0]
X1
X41cm
X2
1cm
Y
X

Answer11.4: Revision for pose estimation SFM1: Exercise 11.4 : Point out which are know variables and unknown variables in this page.
Bundle adjustment– structure reconstruction V4c
59
•
At time t, there are N features
found. be toand knowns are ,,,
known. is J So
],,[~~~
,~
,~
,~
on depends J
knwon, is ],,[ Model so
slide) previous (see plane a is model initial theAssume
knwon are they so,]0,0,0,0,0,0[~~~
,~
,~
,~
Gussesed
:Answer
321321
321321
321321
,T,TT
ZYXandT,T,T
ZYX
T,T,T
iii
iii
)7(*
~
~
~
~
~
~
,:Jacobain Put the
)6(
~
~
~
~
~
~
0
0
:
0
0
~
~
~
~
~
~
:
~
~:
~
~
:
relationsmatrix stack the N,,1,i points, encecorrespond N have we t,frameeach For
166212
33
22
11
33
22
11
62
1
1633
22
11
33
22
11
62
222
222
1
222
222
12
1633
22
11
33
22
11
62
1
12
11
11
12
1
12
16
NN
NNi
i
NNi
Ri
Ri
Ri
Ri
i
Ri
iR
i
Ri
Rii
Rii
Ri
Ri
Ri
Ri
i
Ri
Rii
Rii
Ri
Rii
i
Ri
Ri
Ri
Ri
i
Ri
iR
i
Ri
Rii
Rii
Ri
Ri
Ri
Ri
i
Ri
Rii
Rii
Ri
Rii
N
NNi
i
NNiNi
NiNi
ii
ii
NNi
i
N
JE
TT
TT
TTj
j
J
TT
TT
TT
Z
Yf
Z
f
Z
Xf
Z
XYf
Z
ZZYYf
Z
Xf
Z
f
Z
Yf
Z
ZZXXf
Z
XYf
Z
Yf
Z
f
Z
Xf
Z
XYf
Z
ZZYYf
Z
Xf
Z
f
Z
Yf
Z
ZZXXf
Z
XYf
E
TT
TT
TTj
j
vv
uu
vv
uu
e
e
E

Answer 11.5 Revision for pose estimation SFM1: Exercise 11.5 : Explain why E is known here in the following formula.
Bundle adjustment– structure reconstruction V4c
60
1633
22
11
33
22
11
62
1
12
11
11
12
1
12
~
~
~
~
~
~
:
~
~:
~
~
:
relationsmatrix stack the N,,1,i points, encecorrespond N have weIf
TT
TT
TTj
j
vv
uu
vv
uu
e
e
E
NNi
i
NNiNi
NiNi
ii
ii
NNi
i
N
• )2(
)2(
~
~;
~;
~for formulas following theusing
]~
,~
,~
,~
,~
,~
[~
pose and~~~~
Model gussedby found~
~
allfor tracker feature KLT by the measured,
~
~:
~
~
In :Answer
312
213
3333231
2232221
312
123
3333231
1131211
321321
12
11
11
bTZYX
TZYXf
TZrYrXr
TZrYrXrfv
aTZYX
TZYXf
TZrYrXr
TZrYrXrfu
v
u
v
uMM
TTT]Z,Y,X[Mv
u
iv
u
vv
uu
vv
uu
iii
ii
iii
iiii
iii
iii
iii
iiii
i
i
i
iii
iiiii
i
i
i
NNiNi
NiNi
ii
ii
found. be toand knowns are ,,,
known. is J So
],,[~~~
,~
,~
,~
on depends J
knwon, is ],,[ Model so
slide) previous (see plane a is model initial theAssume
knwon are they so,]0,0,0,0,0,0[~~~
,~
,~
,~
Gussesed
:Answer
321321
321321
321321
,T,TT
ZYXandT,T,T
ZYX
T,T,T
iii
iii

Answer11.6 : Revision for pose estimation SFM1: Identify known variables and unknown variables when k=0 and k=5 in this iterative pose estimation algorithmAns: K=0, we initialize (GUESS) k=0 then E,J, can be found. Then k=0 can be calculated, then the guessed k=1 = k=0+k=0 is found, which will be used in the iteration k=1.When K=5, guessed k=5 is found during k=4 , then E,J, k=5, are calculated, i.e. k=5 =k=4 + k=4 , when k=4. Then k=5 can be found and it will be used to find guessed k=6 =k=5 + k=5
•
Bundle adjustment– structure reconstruction V4c
61
}
~~ is guessNext
enough small is ifBreak
)~
(
inverse pseudo use no if // )~
( and find
{
1max_0Iterate
*)~
(
findcan we,~
guessfirst on the Base
* so
, *
1
10
110
01
00
0
321321
1
kkk
k
kkk
-kk
kkk
k
T
-
EJ
JJE
) k,kK,k (k
EJ
TTT
ΔθEJ
JE
6233
22
11
33
22
11
321321
321321
~
~
~
~
~
~pose guessed
~
~,
~,
~,
~,
~,
~~find want to that wepose theis
,,,,,
:
NTT
TT
TT
TTT
TTT
Note
SFM1:This algorithm is to find the pose

Exercise11.7: Answer11.7: At K=0:[X,Y,Z]i are unknown. Others are known, because pose is found by SFM1, Model Mi is guessed initially at k=0 (a plane) AT K=5: [X,Y,Z]i is unknown.Others are known,because pose is found by SFM1, Model(Mi(xi,y,zi)) is (a better guess) found by the previous SFM2 phaseJ(m) depends on the guessed model M and current pose (current pose is found by SFM1)
•
Bundle adjustment– structure reconstruction V4c
62)7(*
~
~
~
,: model for theJacobian Put the
)6(~
~
~
)~
,()~
,()~
,(
)~
,()~
,()~
,(:
)~
,()~
,()~
,(
)~
,()~
,()~
,(
~
~
~
:
~
~:
~
~
:
21for relationsmatrix stack the ,21 i.e. frames, have weIf
)5(~
~
~
)~
,()~
,()~
,(
)~
,()~
,()~
,(
~
~
~
~
~
1332)(
12
1332
)(
1)(
32)(
13
32
1
1332
)(
1)(
12
1
12
1
)(
,,
,,
MJE
ZZ
YY
XX
M
j
j
J
ZZ
YY
XX
Z
Mg
Y
Mg
X
MgZ
Mg
Y
Mg
X
Mg
Z
Mg
Y
Mg
X
MgZ
Mg
Y
Mg
X
Mg
ZZ
YY
XX
j
j
vv
uu
vv
uu
e
e
E
,..Γ,t,Γ,tΓ
ZZ
YY
XX
Z
Mg
Y
Mg
X
MgZ
Mg
Y
Mg
X
Mg
ZZ
YY
XX
jvv
uue
m
ii
ii
ii
tm
tm
m
ii
ii
ii
t
iviviv
iuiuiu
t
iviviv
iuiuiu
ii
ii
ii
im
im
tii
ii
tii
ii
t
t
ii
ii
ii
t
iviviv
iuiuiu
tii
ii
iim
titi
titi
• The formulas apply to one feature (i) for all time frames t=1,2,….
• SFM2 will N times , each time is independent.
• See next slide for the graphical illustration,
Measured
Result from the guessed model and given pose
JacobianCurrent Guessed model
New Guessed model

SFM2: Algorithm to find the i-th model point (repeat this N time to get all points)Exercise11.8 : identify which are known and unknown when K=0, K=5Answer11.8: k=0, Model [X,Y,Z]i is a point in a plane, pose (by SFM1) is known and the algorithm can find a better model.Answer: k=5, Model [X,Y,Z]iis the model found in the previous SFM2 and pose is found by SFM1, the algorithm can find a better Model.
• Bundle adjustment– structure reconstruction V4c 63
result theis ~
loop above theof end After the
}
~~~ is guessNext
enough small is ifBreak
inverse pseudo use matrx, square anot is if // and E find
{
1max_0Iterate
*
findcan we,~
guessfirst on the Base
* so , *
1
1)(
1
0)(
0
0
1)(
k
kkk
k
km
k
-kk
km
k
k
T
-m
M
MMM
M
EJM
JJ
) k,kK,k (k
MJE
M
ZYXM
ΔMekJMJE
SFM2 previous by the found model
~ iterativeat plane a
~model Guessed]
~,
~,
~[
~find want to wemodel theis
unknwon],,[
~
~
~:
_
0_
kati
thkati
Tiiii
i
Tiiii
ii
ii
ii
M
kM
ZYXM
M
ZYXM
ZZ
YY
XX
M
Note
SFM2: This algorithm is to find the model M