Embed Size (px)
Citation preview

Adv. Radio Sci., 10, 33–37, 2012www.adv-radio-sci.net/10/33/2012/doi:10.5194/ars-10-33-2012© Author(s) 2012. CC Attribution 3.0 License.
Advances inRadio Science
Impact of system parameter selection on radar sensor performancein automotive applications
H.-L. Bl oecher1, M. Andres2, C. Fischer1, A. Sailer2, M. Goppelt2, and J. Dickmann1
1Daimler AG, Group Research and Advanced Engineering, 89081 Ulm, Germany2University Ulm, Institute of Microwave Techniques, 89081 Ulm, Germany
Correspondence to:H.-L. Blocher ([email protected])
Abstract. The paper deals with the investigation of rele-vant boundary conditions to be considered in order to op-erate 77/79 GHz narrow and ultra wide band automotiveradar sensors in the automotive platform and the automotiveenvironment.
1 Introduction
Millimeterwave radar is a vital component of present andfuture automotive environmental sensing systems. Infor-mation given by these systems is essential for the real-ization of automotive safety- and driver assistance func-tions. Automotive radar sensors operating in the 77/79 GHzband will, due to frequency regulation constraints, offerthe only remaining option to operate at UWB bandwidth(>500 MHz). Moreover, due to the decreasing sensor di-mensions with increasing frequency, W-band radar will offerincreased angular resolution using antennas with moderateaperture dimensions.
The frequency range 77 GHz to 81 GHz (79 GHz), hasbeen defined by the European Commission in 2004 as the fre-quency allocation for automotive short range radar systems.The initial intention and objective of this 79 GHz project is toestablish and speed up the worldwide harmonised frequencyallocation for vehicular radars in that frequency range. The79 GHz automotive frequency band, once available world-wide, will promote and accelerate the transition from the cur-rently used 24 GHz band, which is an intermediate regulatorysolution, to the 79 GHz band.
As a consequence of the 24/79 GHz frequency allocationfor UWB automotive radar in Europe by 2005, industry hadto show honest efforts to develop and provide a cost efficienttechnology platform at the 77/79 GHz band. Thus, the Ger-
man BMBF public funded projects KOKON (2004–2007)and RoCC (2008–2011) were established. Within the BMBFpublic funded project RoCC – “radar-on-chip for cars”, thenecessary cost efficient SiGe based technology for the real-ization of W-band radar is developed. Furthermore, relevanttechnical constraints to be considered for operation of thesesensors are investigated and the consequences with respectto sensor specifications are derived. Within the paper, somevery essential constraints are discussed:
– Covered/buried placement and packaging of W bandradar within the automotive platform, which leads to theneed to design car body parts as radomes.
– Necessary operational bandwidth, derived from relevantapplications and used for the realization of adequaterange and angular resolution.
– Car to car interference and possible countermeasures,in particular with respect to realization of safety func-tions and proposed market penetration rates of automo-tive radar.
Finally, the potential of DBF/DoA approaches to efficientlycontribute to the solution of these problems will be discussed.
2 Selection of application driven radar parameters
Due to diverse urban scenarios, radar sensors have to copewith different target types, like pedestrians, motorbikes, carsand trucks. Hence, urban scenarios require highly sophis-ticated radar sensor performance. High range and angularresolution are essential to detect two closely neighbouringtargets with unequal radar cross sections and the same veloc-ity. For example, a pedestrian waiting in between two parkedcars and intending to cross the street, requires high range and
Published by Copernicus Publications on behalf of the URSI Landesausschuss in der Bundesrepublik Deutschland e.V.

34 H.-L. Bloecher et al.: Radar sensor performance in automotive applications
directive antenna was attached to a mechanical scanning unit. The radar sensor was equipped
with a double folded reflect array antenna with a half power beam width (HPBW) of
approximately 1° (two way pattern). Therefore, the angular stepping size of the mechanical
scanning unit was adjusted to 1°. The radar sensor was placed behind the car at the origin of
the coordinate system at a distance of 8 m. In Fig. 1 left a bandwidth of 1 GHz and in Fig. 1
right a bandwidth of 5 GHz was adjusted to the FMCW radar. Comparing these two images
the increase of the bandwidth enables a more precise extraction of the contour of the vehicle.
However, the main scattering centers like the left rearview mirror (A), the transition between
running surface of the left wheel and asphalt (B), the rear light units (C) and the license plate
(D) could be extracted even at the bandwidth of 1 GHz.
Figure 1. Measurement result of the contour determination of a car using a bandwidth of 1
GHz (left) and 5 GHz (right) at a carrier frequency of 77 GHz and an angular resolution of
1°.
The angular resolution of the radar sensor has an impact on the contour determination of the
target as well. To analyze this influence two different antenna types were used to scan the
same measurement scenario. In Fig. 2 left and right the car was located at a distance of 10 m
with a gear angle of 30°. In Fig. 2 left, the previous reflected fold array antenna with a HPBW
of 1° was applied on the radar sensor and in Fig. 2 right a lens horn antenna with a HPBW of
approximately 3° (two way) was attached. For both measurements a bandwidth of 6 GHz was
adjusted. The measurement results show that by reducing the angular resolution capability
from 1° to 3°, the uncertainty of the width of the car increases and hence, the determination of
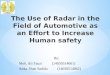
Fig. 1. Measurement result of the contour determination of a carusing a bandwidth of 1 GHz (left) and 5 GHz (right) at a carrierfrequency of 77 GHz and an angular resolution of 1◦.
angular resolution of the radar sensor. To estimate the timeto collision, the length, width and orientation of the car andthe exact position of the pedestrian have to be determined.Having preliminary knowledge of the main locations of thescattering centers enables the evaluation of the situation to bemore precise. Strong reflection regions of a car are located atthe rearview mirror, transition between running surface andasphalt, light units and the license plate (Andres, 2011).
To extract the contour of a car, the required bandwidth andangular resolution have to be determined. In Fig. 1, a 77 GHzFMCW radar frontend used in (Feil, 2010) with a high direc-tive antenna was attached to a mechanical scanning unit. Theradar sensor was equipped with a double folded reflect arrayantenna with a half power beam width (HPBW) of approxi-mately 1◦ (two way pattern). Therefore, the angular steppingsize of the mechanical scanning unit was adjusted to 1◦. Theradar sensor was placed behind the car at the origin of thecoordinate system at a distance of 8 m. In Fig. 1 left a band-width of 1 GHz and in Fig. 1 right a bandwidth of 5 GHz wasadjusted to the FMCW radar. Comparing these two imagesthe increase of the bandwidth enables a more precise extrac-tion of the contour of the vehicle. However, the main scat-tering centers like the left rearview mirror (A), the transitionbetween running surface of the left wheel and asphalt (B),the rear light units (C) and the license plate (D) could beextracted even at the bandwidth of 1 GHz.
The angular resolution of the radar sensor has an impacton the contour determination of the target as well. To analyzethis influence two different antenna types were used to scanthe same measurement scenario. In Fig. 2 left and right thecar was located at a distance of 10 m with a gear angle of 30◦.In Fig. 2 left, the previous reflected fold array antenna witha HPBW of 1◦ was applied on the radar sensor and in Fig. 2right a lens horn antenna with a HPBW of approximately 3◦
(two way) was attached. For both measurements a bandwidth
orientation is more difficult. Furthermore, the interference between two neighbouring
scattering centers increases. This effect can cause a destructive interference and hence a loss
of the detectable scattering center.
In conclusion, using a bandwidth larger than 1 GHz, and an angular resolution better than 1°,
enables estimation of the contour of a vehicle. This leads to an improved detection of the
target, resulting in higher accuracy for the post processed tracking.
Figure 2. Measurement result of the contour determination of a car using a bandwidth of
6 GHz and an angular resolution of ~1° (left) and ~3° at a carrier frequency of 77 GHz.
3 Lateral resolution and flexible antenna pattern adaption
The number of people living in cities and also the number of cars in the streets is expected to
increase significantly within the next years (IAE, 2008). Due to this development the cars and
also the sensors used inside the cars need to be adapted to this environment with growing
complexity. The requirements for the sensors used in an inner city environment differ largely
from those used on highways or motor-ways where the number of cars is small. Also close
encounters of similar sensors occur seldom and only for a short time. The inner city scenario
is the exact opposite: One encounters many cars and therefore has the necessity to
differentiate between these with high reliability. These cars may also be equipped with similar
sensors. Therefore interference free coexistence must also be assured.
Fig. 2. Measurement result of the contour determination of a carusing a bandwidth of 6 GHz and an angular resolution of∼1◦ (left)and∼3◦ at a carrier frequency of 77 GHz.
of 6 GHz was adjusted. The measurement results show thatby reducing the angular resolution capability from 1◦ to 3◦,the uncertainty of the width of the car increases and hence,the determination of orientation is more difficult. Further-more, the interference between two neighbouring scatteringcenters increases. This effect can cause a destructive inter-ference and hence a loss of the detectable scattering center.
In conclusion, using a bandwidth larger than 1 GHz, andan angular resolution better than 1◦, enables estimation of thecontour of a vehicle. This leads to an improved detection ofthe target, resulting in higher accuracy for the post processedtracking.
3 Lateral resolution and flexible antenna patternadaption
The number of people living in cities and also the number ofcars in the streets is expected to increase significantly withinthe next years (IAE, 2008). Due to this development the carsand also the sensors used inside the cars need to be adaptedto this environment with growing complexity. The require-ments for the sensors used in an inner city environment differlargely from those used on highways or motor-ways wherethe number of cars is small. Also close encounters of simi-lar sensors occur seldom and only for a short time. The innercity scenario is the exact opposite: One encounters many carsand therefore has the necessity to differentiate between thesewith high reliability. These cars may also be equipped withsimilar sensors. Therefore interference free coexistence mustalso be assured.
The challenge to be faced in the inner city scenario is thereliability of the measurements. Resolution of the measure-ments in range was already covered but also the lateral res-olution and accuracy is becoming more and more important.In the environment faced on highways movement is mostlyin the range domain. In scenarios with turning cars, trackingof lateral movement also comes into play. In radar sensorslateral accuracy is directly correlated with angular accuracy
Adv. Radio Sci., 10, 33–37, 2012 www.adv-radio-sci.net/10/33/2012/

H.-L. Bl oecher et al.: Radar sensor performance in automotive applications 35
The challenge to be faced in the inner city scenario is the reliability of the measurements.
Resolution of the measurements in range was already covered but also the lateral resolution
and accuracy is becoming more and more important. In the environment faced on highways
movement is mostly in the range domain. In scenarios with turning cars, tracking of lateral
movement also comes into play. In radar sensors lateral accuracy is directly correlated with
angular accuracy which depends on the aperture of the antenna. The aperture is proportional
to the antenna’s size and its operating frequency. As space is very limited in today’s cars, the
size of the sensor and therefore the antenna size is limited. To increase the resolution of a
sensor one can either move to a higher frequency, which is limited by currently available
technology, or use Digital Beamforming in combination with super resolution techniques
(Feil, 2007). These techniques trade antenna space for computational complexity.
Fig. 3 gives an example for the potential of super resolution techniques. In this case the
method of linear prediction with five coefficients was applied as described in detail e.g. in
(Mayer, 2008). One can see that with traditional beamforming many scatterers are blurred. By
applying additional signal processing this blur can be reduced significantly and contours
become more clearly visible. Another possible advantage of this high angular resolution is
that interferers may be suppressed with higher selectivity. The necessary steps for this
adaptive beamshaping will be the subject of further research.
Figure 3. Radar plot of a scenario processed with traditional beamforming (left) and
beamforming using linear prediction with 5 coefficients (right). Scale is the same in both
plots.
Fig. 3. Radar plot of a scenario processed with traditional beamforming (left) and beamforming using linear prediction with 5 coefficients(right). Scale is the same in both plots.
which depends on the aperture of the antenna. The aperture isproportional to the antenna’s size and its operating frequency.As space is very limited in today’s cars, the size of the sen-sor and therefore the antenna size is limited. To increase theresolution of a sensor one can either move to a higher fre-quency, which is limited by currently available technology,or use Digital Beamforming in combination with super res-olution techniques (Feil, 2007). These techniques trade an-tenna space for computational complexity.
Figure 3 gives an example for the potential of super reso-lution techniques. In this case the method of linear predic-tion with five coefficients was applied as described in detaile.g. in Mayer (2008). One can see that with traditional beam-forming many scatterers are blurred. By applying additionalsignal processing this blur can be reduced significantly andcontours become more clearly visible. Another possible ad-vantage of this high angular resolution is that interferers maybe suppressed with higher selectivity. The necessary stepsfor this adaptive beamshaping will be the subject of furtherresearch.
4 Sensor – sensor interference and interferencemitigation
Daimler’s activities in the RoCC project with respect to sen-sor interference and interference mitigation aim at under-standing interference mechanisms as well as testing and eval-uating countermeasures (interference mitigation methods).For this purpose a radar simulator was created, analytic cal-culations were performed, and measurements with differ-ent radar frontends were conducted in the laboratory andwith a vehicle.
For example, a vehicle with a radar frontend using FMCWmodulation was moved towards a stationary frontend emit-ting a CW signal. The effect of the interfering CW signalat 77.5 GHz intersecting the FMCW frequency ramp (witha rise time of 2 ms from 77 GHz to 78 GHz) can be seen inFig. 4 in the time domain (upper diagram) and in the fre-quency domain (lower diagram). The interference creates awideband signal at the IF port of the mixer which reduces thesensitivity of the radar (Goppelt, 2011).
4 Sensor – sensor interference and interference mitigation
Daimler’s activities in the RoCC project with respect to sensor interference and interference
mitigation aim at understanding interference mechanisms as well as testing and evaluating
countermeasures (interference mitigation methods). For this purpose a radar simulator was
created, analytic calculations were performed, and measurements with different radar
frontends were conducted in the laboratory and with a vehicle.
For example, a vehicle with a radar frontend using FMCW modulation was moved towards a
stationary frontend emitting a CW signal. The effect of the interfering CW signal at 77.5 GHz
intersecting the FMCW frequency ramp (with a rise time of 2 ms from 77 GHz to 78 GHz)
can be seen in Fig. 4 in the time domain (upper diagram) and in the frequency domain (lower
diagram). The interference creates a wideband signal at the IF port of the mixer which reduces
the sensitivity of the radar (Goppelt, 2011).
One possible way to reduce the effect of the interference is to detect and weight (multiply) the
affected samples with the following weighting function:
( ) ( )4
12
1
iiii2cos15.01iw ⎟
⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−−⋅π⋅
−⋅−= , (1)
with
21 iii ≤≤ . (2)
It can be seen in Fig. 5 that this countermeasure significantly reduces the interference,
resulting in a greatly improved sensitivity. Furthermore, it is easy to implement, since it
consists purely of digitally processing the time samples without the need to modify the
frontend.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-100
-50
0
50
100
t [ms]
A [m
V]
time samples
0 5 10 15 20 25 30 35 40 45 50 55 60-100
-80-60-40-20
0
R [m]
P [d
Bm
]
PSDCFAR threshold
Fig. 4. FMCW radar signal with interference from a CW interferer.Upper diagram: the time samples taken by the analog-to-digital con-verter. Lower diagram: the signal in the frequency domain (powerspectral density) along with the CFAR threshold.
One possible way to reduce the effect of the interferenceis to detect and weight (multiply) the affected samples withthe following weighting function:
w(i) =
(1−0.5·
(1−cos
(2·π ·(i − i1)
i2− i1
)))4
, (1)
with
i1 ≤ i ≤ i2. (2)
It can be seen in Fig. 5 that this countermeasure significantlyreduces the interference, resulting in a greatly improved sen-sitivity. Furthermore, it is easy to implement, since it con-sists purely of digitally processing the time samples withoutthe need to modify the frontend.
5 Covered platform integration of 77/79 GHzautomotive radar sensors
Within the car, short range radar (SRR) sensors are typicallymounted invisibly behind painted bumpers or other layered
www.adv-radio-sci.net/10/33/2012/ Adv. Radio Sci., 10, 33–37, 2012

36 H.-L. Bloecher et al.: Radar sensor performance in automotive applications
Figure 4. FMCW radar signal with interference from a CW interferer. Upper diagram: The
time samples taken by the analog-to-digital converter. Lower diagram: The signal in the
frequency domain (power spectral density) along with the CFAR threshold.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-100
-50
0
50
100
t [ms]
A [m
V]
weighted time samples
0 5 10 15 20 25 30 35 40 45 50 55 60-100
-80-60-40-20
0
R [m]
P [d
Bm
]
PSDCFAR threshold
Figure 5. The FMCW radar signal after applying the countermeasure (weighting of the
time samples).
5 Covered platform integration of 77/79GHz automotive radar sensors
Within the car, short range radar (SRR) sensors are typically mounted invisibly behind
painted bumpers or other layered components. Any cover of an antenna of a radar sensor has
to be carefully designed, in order to avoid performance degradation due to transmission
losses, reflections, and edge effects. This is a crucial issue concerning sensor systems working
in the frequency range from 76 GHz to 81 GHz even more than for lower operating
frequencies. Bumpers and other kinds of components mounted on a vehicle’s front or rear-end
have to be considered as radome structures. For the desired frequency range, their thickness is
commonly in the order of not more than a couple of wavelengths.
The OEMs among the project partners, Daimler and BMW, have to consider a wide range of
sensor packaging aspects in RoCC. Special attention has to be turned on the impact of the
necessary frequency bandwidth around 79 GHz. This parameter is influenced by the
electromagnetic characteristics of bulk material and painting (permittivity and loss tangent),
manufacturing tolerances, multiple paintings (especially repair paintings) and covering of
radomes with water, snow, ice, dust or salt, etc.
Fig. 5. The FMCW radar signal after applying the countermeasure(weighting of the time samples).
components. Any cover of an antenna of a radar sensor has tobe carefully designed, in order to avoid performance degra-dation due to transmission losses, reflections, and edge ef-fects. This is a crucial issue concerning sensor systems work-ing in the frequency range from 76 GHz to 81 GHz even morethan for lower operating frequencies. Bumpers and otherkinds of components mounted on a vehicle’s front or rear-endhave to be considered as radome structures. For the desiredfrequency range, their thickness is commonly in the order ofnot more than a couple of wavelengths.
The OEMs among the project partners, Daimler andBMW, have to consider a wide range of sensor packaging as-pects in RoCC. Special attention has to be turned on the im-pact of the necessary frequency bandwidth around 79 GHz.This parameter is influenced by the electromagnetic charac-teristics of bulk material and painting (permittivity and losstangent), manufacturing tolerances, multiple paintings (espe-cially repair paintings) and covering of radomes with water,snow, ice, dust or salt, etc.
In Bloecher (2009a, b), first results concerning sensor inte-gration behind painted bumpers and particular LRR radomesare depicted. Extensive studies of manufacturing tolerancesand the composition of substrate materials as well as paintwere carried out by Daimler within the project RoCC. As anexemplary result, Fig. 6 shows the transmission|t | and the re-flection |r| through a bumper with metallic paint. The simu-lation was carried out with a multi-layer model implementedin Matlab. For the ideal case of properly chosen substratethicknessdsub= 3.44 mm, the reflection|r| is found to be bet-ter than−20 dB for the whole SRR frequency band of 77 to81 GHz. Introducing a variation of the equivalent permittiv-ity of the paint would shift the desired minimum of|r| tolower or higher frequencies. Nevertheless, the transmission|t | stays approximately constant.
In (Bloecher, 2009a; Bloecher, 2009b), first results concerning sensor integration behind
painted bumpers and particular LRR radomes are depicted. Extensive studies of
manufacturing tolerances and the composition of substrate materials as well as paint were
carried out by Daimler within the project RoCC. As an exemplary result, Fig. 6 shows the
transmission |t| and the reflection |r| through a bumper with metallic paint. The simulation was
carried out with a multi-layer model implemented in Matlab. For the ideal case of properly
chosen substrate thickness dsub = 3.44 mm, the reflection |r| is found to be better than -20 dB
for the whole SRR frequency band of 77 to 81 GHz. Introducing a variation of the equivalent
permittivity of the paint would shift the desired minimum of |r| to lower or higher frequencies.
Nevertheless, the transmission |t| stays approximately constant.
A radome that is robust against variation of the material parameters and thickness of substrate
and paint has to provide sufficient transmission bandwidth. As a consequence, variations of
dedicated scale would not seriously affect the radar’s performance. Considering
manufacturing tolerances, varying material combinations and required bandwidth, thickness
optimization of the substrate material was found to be a good compromise between RF
performance, costs and effort. Nevertheless, this compromise is strongly dependent on
specific sensor requirements and the specific car model’s needs. In the case where thickness
matching does not provide sufficient RF performance, one could apply broad band design
methods including frequency selective surface structures or inductive structures on the back
side of the bumper as shown in (Pfeiffer, 2009). In conclusion, meeting the desired RF
performance always means balancing effort in RF engineering with keeping dimensional
accuracy and material composition.
70 75 80 85-60
-40
-20
0
Am
plitu
de (d
B)
Frequency (GHz)
|t|, εr,paint = 80|r|, εr,paint = 80|t|, εr,paint = 96|r|, εr,paint = 96|t|, εr,paint = 64|r|, εr,paint = 64
70 75 80 85-60
-40
-20
0
Am
plitu
de (d
B)
Frequency (GHz)
|t|, εr,paint = 80|r|, εr,paint = 80|t|, εr,paint = 96|r|, εr,paint = 96|t|, εr,paint = 64|r|, εr,paint = 64
Figure 6. Simulation of transmission |t| and reflection |r| through a bumper with metallic
paint. Variation of the permittivity of the paint εr,paint shifts the reflection minimum.
Fig. 6. Simulation of transmission|t | and reflection|r| through abumper with metallic paint. Variation of the permittivity of the paintεr,paint shifts the reflection minimum.
A radome that is robust against variation of the mate-rial parameters and thickness of substrate and paint hasto provide sufficient transmission bandwidth. As a conse-quence, variations of dedicated scale would not seriously af-fect the radar’s performance. Considering manufacturing tol-erances, varying material combinations and required band-width, thickness optimization of the substrate material wasfound to be a good compromise between RF performance,costs and effort. Nevertheless, this compromise is stronglydependent on specific sensor requirements and the specificcar model’s needs. In the case where thickness matchingdoes not provide sufficient RF performance, one could ap-ply broad band design methods including frequency selectivesurface structures or inductive structures on the back side ofthe bumper as shown in (Pfeiffer, 2009). In conclusion, meet-ing the desired RF performance always means balancing ef-fort in RF engineering with keeping dimensional accuracyand material composition.
6 Conclusions
Automotive radar is an essential component of present andfuture automotive environmental sensing systems used forthe realization of automotive active safety and comfort func-tions. Due to regulatory reasons as well as the ability to usethe same technology platform for long-, mid- and short rangeautomotive radar, the 77/79 GHz frequency band is the futurechoice. The development of a low cost and robust SiGe basedtechnology platform has been done within the BMBF pub-lic funded projects KOKON and RoCC. Beneath the avail-ability of an adequate technology platform, further technicaland operational requirements have to be fulfilled to operatethe sensor within the automotive platform and the environ-ment. Within the project’s methods, solutions with respect toplatform integration, sensor to sensor interference and ap-plication driven sensor parameter selection and have beendeveloped and characterized successfully. These results are
Adv. Radio Sci., 10, 33–37, 2012 www.adv-radio-sci.net/10/33/2012/

H.-L. Bl oecher et al.: Radar sensor performance in automotive applications 37
to be transferred into series development of the radar sen-sors. Furthermore, DBF/DoA/adaptive beamforming algo-rithms could potentially be used to obtain improved angu-lar resolution with limited physical antenna dimensions. Theflexibility of the adaptive antenna pattern will be used forsuppression of interfering signals to keep and improve, forexample, the radar sensitivity.
Acknowledgements.The authors wish to thank the German FederalMinistry of Education and Research (BMBF) for the funding of theRoCC project. The authors also wish to thank Stacey Rukezo (cur-rently with Daimler AG) for proofreading the manuscript.
References
Andres, M., Feil, P., Menzel, W., Bloecher, H.-L., and Dickmann,J.: Analysis of automobile scattering center locations by SARmeasurements, Proc. of Radar Conference 2011, Kansas City,USA, Mai, 2011.
Bloecher, H.-L., Sailer, A., Rollmann, G., and Dickmann, J.: 79GHz UWB automotive short range radar – Spectrum allocationand technology trends, Adv. Radio Sci., 7, 61–65, 2009,http://www.adv-radio-sci.net/7/61/2009/.
Bloecher, H.-L., Sailer, A., Andres, M., Goppelt, M., and Dick-mann, J.: Trends in Development of SiGe based 76–81 GHzAutomotive Radar, IRS 2009 – International Radar Symposium,Hamburg, 2009.
Feil, P., Mayer, W., Menzel, W., and Guehl, R.: Various CrossRange Resolution Techniques Applied to an Eight Channel 77GHz Sensor, EuRAD 2007, Munich, Germany, 59–62, 2007.
Feil, P., Mayer, W., Kraus, T., Migliaccio, C., and Menzel, W.: In-dustrial and Security Applications of Imaging Millimeter WaveSensors, Technisches Messen, July–August, 2010.
Goppelt, M., Blocher, H.-L., and Menzel, W.: Analytical investi-gation of mutual interference between automotive FMCW radarsensors, Proc. of GEMIC 2011, Darmstadt, Germany, 2011.
International Energy Agency (IEA): World Energy Outlook 2008,2008.
Mayer, W.: Abbildender Radarsensor mit sendeseitig geschalteterGruppenantenne, Dissertation, Ulm, 2008.
Pfeiffer, F. and Biebl, E. M.: Inductive Compensation ofHigh-Permittivity Coatings on Automobile Long-Range RadarRadomes, IEEE T. Microw. Theory., 57, 2627–2632, November,2009.
www.adv-radio-sci.net/10/33/2012/ Adv. Radio Sci., 10, 33–37, 2012












![Joint Radar-Communications Strategies for Autonomous Vehicles · referred to as automotive radar [2], is substantially different from traditional radar systems: Most notably, automotive](https://img.pdfslide.net/doc/110x75/5f9aea395dc63d4be51d799f/joint-radar-communications-strategies-for-autonomous-vehicles-referred-to-as-automotive.jpg)