Embed Size (px)
Citation preview

BNL-66292Informal Report
IMPLEMENTATION OF SEISMIC STOPS
IN PIPING SYSTEMS~fg=j~lvm
ff%o51999P. Bezler, N. Simos, Y.K. Yang fii?$sa-I
Brookhaven National LaboratoryBrookhaven Science Associates
U.S. Department of EnergyUpton, NY
February 1993
Department of Advanced Technology, Brookhaven National Laboratory
Upton, New York 11973
Prepared for the U.S. Nuclear Regulatory CommissionOftice of Nuclear Reactor RegulationContract No. DE-ACO2-98CH1O886

NOTICE
This report was prepared as an account of work sponsored by the United States Government.Neither the United States nor the United States Department of Energy, nor any of theiremployees, nor any of their contractors,subcontractors,or their employees, makes any warranty,express or implied, or assumes any legal Iiahilityor responsibility for the accuracy, completeness,or usefulness of any information, apparatus, product or process disclosed, or represents that itsuse would not infringe privately owned rights. Reference herein to any specific commercialproduc~ process, or service by trade name, trademark, manufacture%or otherwise, doea notnecessarily constitute or imply its endorsemen~ recommendation, or favoring by the UnitedStates Government or any agency, contractor, or subcontractor thereof.
The views and opinions of authors expressed herein do not necessarily state or reflect those ofthe United States Government or U.S. Nuclear Regulatory Commission.

DISCLAIMER
Portions of this document may be illegiblein electronic image products. Images areproduced from the best available originaldocument.

IMPLEMENTATION
IN PIPING
OF SEISMIC STOPS
SYSTEMS
P. Bezler, N. Simos, Y.K Wang
Brookhaven National LaboratoryUpton, NY
February 1993

ABSTRACT
Commonwealth Edison has submitted a request to NRC to replace the snubbers in the ReactorCoolant BypassLme of ByronStation-Unit 2 withgapped pipe supports. The speciiicsupportsintendedfor use are commercialunits designated“SeismicStops”manufacturedby Robert L. CloudAssociates,Inc. (RLCA). These devices have the physical appearance of snubbers and are essentially spring supportsincorporating clearance gaps sized for the Byron Station application. Although the devices have anonlinear stiffness characteristi~ their design adequacy is demonstrated through the use of a proprietarylinear elastic piping analysis code “GAPPIPE” developed by RLCA. The code essentially has all thecapabilities of a conventional piping analysis code while including an equivalent linearization technique toprocess the nonlinear spring elements.
Brookhaven National Laboratory (BNL) has assisted the NRC staff in its evaluation of the RLCAimplementation of the equivalent Linearization technique and the GAPPIPE code. Towards this endjBNL performed a detailed review of the theoretical basis for the metho~ an independent evaluation ofthe Byron piping using the nonlinear time history capability of the ANSYS computer code and by resultcomparisons to the RLCA developed results, an assessment of the adequacy of the response estimatesdeveloped with GAPPIPE. Associated studies included efforts to ver@ the ANSYS analysis results andthe development of bounding calculations for the Byron Piping using linear response spectrum methods.
...Lu

Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..iii
L~tof Figures and Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..v
l%xutiveSununary.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..vi
1. rNrRomJcI’loN...........................................................1
2. METHODOLOGY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...1
3. METHOD AND IMPLEMEN’TATION REVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...4
4. VERIFICATION ANALYSES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...5
A. ANSYSNon-Linear Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7B. ANSYSLiiear Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8C. Follow On . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...8D. Observations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...9
5. ANSYSVERIFICAT’ION ANALYSIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...9
6. CONCLUSIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
7. REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...11
APPENDIXA PACKAGESOFINFORMATIONPROVIDEDFORSTAFFREVIEW . . . . . A-1
iv

LIST OF TABLES
Table 1Table 2Table 3Table 4Table 5Table 6Table 7Table 8
Table 9
Figure 1Figure 2Figure 3Figure 4Figure 5Figure 6Figure 7Figure 8“Figure 9Figure 10Figure 11Figure 12Figure 13Figure 14Figure 15Figure 16Figure 17
Figure 18Figure 19Figure 20Figure 21Figure 22AFigure 22BFigure23AFigure 23BFigure 24
Reactor Coolant Bypass Line Model Paraeter . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Comparison of Natural Frequency Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..13Seismic Stop Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...-14Nodal Displacements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - . . . . . . . . . . ...15Reaction Forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. --- . . . . ..”””16Max. Pipe Stresses ofEachSection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...18Max. Nodal Displacements . . . . . . . . . . . . . . . . . . . . . . ..- . . . . . . . . . . . . . . . ...19Reaction Forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..- . . . ..-. ””20
AnchorForces Comparisonfor HovgoardModel . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
LISTOFFIGURES
Seismic Stop Pipe Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - . . . . . ...25Force-Displacement Relationshipof asymmetric Support . . . . . . . . . . . . . . . . . . ...26&mplel Convergence, Stopll. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...27Example l, piping System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - . - - - . ...-...28Byron Station-Unit 2Reactortilmt Bypass . . . . . . . . . . . . . . . . . . . . . . . . . . . ..29ByronStation-Unit2RCS2RC19/’o4 . . . . . . . . . . . . . . . . . . . . . . . . . ..- .-” .-..-30SEX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . “.-..31SSEY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..”” .”32SUE Z . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...33SEX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..--..-34SSEY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - . . . . ..”35SUE Z . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..”.36SSEXMAX PSD VALUE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...37SSEYMAX PSDVALUE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...38SSEZMAX PSD VALUE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...393D Piping System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..-....403DPiping System Computational Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
~pfied Forchg Functions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...".."".""". 42SpringForce Node4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..”43Spring Force Node 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - . . . . - --..-..44Spring Force Node 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . - - . - -...-..45Cantilever Beam Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . - . . . . . - . - . . . . . ...46Ground Acceleration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...46Displacement Tme History Ameleration Input . . . . . . . . . . . . . . . . . . . . . . . . . . ...47Displacement 71meHistory Force Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...47Displacement llmeHistog Pseudo Force AnaIysis . . . . . . . . . . . . . . . . . . . . . . . ...48

EXECUTIVE SUMMARY
A request to aUow the replacement of snubbers in the Reactor Coolant Bypass Line of ByronStation - Unit 2 with commercially produced gapped pipe supports was submitted to NRC. Thecommercial gapped pipe supports are designated “Seismic Stops” and are manufactured by Robert L.Cloud kwciat~ Inc. (RLCA). A description of the evacuations performed by Brookhaven NationalLaboratory (BNL) to assist the NRC staff to respond to this request is presented.
Gapped pipe supports can reduce piping vibrations by limiting the amplitude of free vibrations. TheSeismic Stops incorporate engineered gaps in mechanical devices to meet this purpose. Although thesedevices exhiilt nonlinear characteristi~ RLCA has developed a proprietary Iinear elastic piping analysiswale, “GAPPIPE,” to demonstrate the design adequacy of the devices in piping systems. BNL performeda detailed review of the theoretical basis for GAPPIPE code and independent evaluations of the responseof the Byron Piping with gapped supports using nonlinear tine history analyses and bounding linearresponse spectrum analyses.
vi
Based on the evaluations it was concluded that properly designed gapped supports could effectivelycontrol seismic motions l%e GAPPIPE code was determined to provide estimates of piping systemresponse with an accuracy consistent with the response spectrum methodology. Further, in general, thecmde can be expected to provide conservative estimates of the time averaged support forces.

1. INTRODUCTION
The redesignand optimizationof pipingsupport systems has received considerableattention in recent years. A primary aim ofthese redesign efforts is to reduce the number ofsnubbers used in the support system. Snubberreduction is desirable since it directly reducesthe time consuming and costly inspection andmaintenance operations required for snubbersand the likelihood of adverse system responseassociated with snubber malfunctions. Suchredesign efforts are referred to as snubberreduction programs.
One approach to snubber reduction is tosimply replace each snubber with an alternatesupport device. To be comparable to a snubbersuch a device must accommodate thermalexpansions while restricting excessive seismicmotions, A passive device which has thesecharacteristics is a gapped pipe support. Ideally
the gap is large enoughto allowfree thermalexpansion while small enough to limit seismicmotions to acceptable levels.
Gapped supports made up of box framessurrounding the pipe but with a clearance gaparound the entire circumference are used infossil fuel power plants. Commercial uni*designated “Seismic StopS” incorporatingclearance gaps sized for specific applicatio~ aremanufactured by Robert L. Cloud Associat%Inc. (RLCA) for use in the nuclear industry.These devices have the physical appearance of asnubber (Figure 1), and are designed to allowpin to pin snubber replacement.
The adequacy of nuclear piping systems andtheir associated supports are typicd.lydemonstrated using linear elastic analysismethods. The gapped suppor~ however, is anon-linear element and its inclusion in a systemposes computational complexities. In order tomarket the seismic stop, RLCA has developed aproprietary linear-elastic piping analysis code
which uses equivalent linearized properties tosimulate these restraints. The RLCA code istitled “GAPPIPE” and essentially has all thecomputational capabilities of a conventionalpiping analysis code while including the
equivalent linearization option.
CommonwealthEdison (CE) has submittedarequest to replace the snubbers in theByron/Braidwood units with seismic stops. Theactual calculations to determine the requiredsizes and number of restraints was performed byRLCA using the GAPPIPE rode. BrookhavenNational Laboratory (13NL) has assisted the staffin its evaluation of the RLCA linearizationmethodology and the application of themethodology to the analysis of theByron/BraidWood piping systems with seismicstops. Specifically, BNL performed a detailedreview of the theoretical basis for themethodology, a review of the implementation ofthe methodology in the GAPPIPE code, aniud&pendent evaluation of the Byron/Braidwoodpiping using the non-linear time histoVcapability of the computer program ANSYS, astudy to veri& the non-linear capability of theANSYS code and bounding calculations for the
Byron/Braidwood piping using the linearresponse spectrum option of the ANSYS code.
The sections that follow provide a descriptionand summary of the BNL studies.
2. GAPPIPE METHODOLOGYDESCRIPTION
The GAPPIPE computer program is a fullfeatur@ finite element piping analysis code. Itwas developed by RLCA by expanding andmodifyiig the public domain structural analysiscode SAPIV. A key feature of the code is theincorporation of an analysis algorithm designedspecifically to allow the dynamic evaluation ofpiping systems with gapped supports using linearelastic response spectrum methods. Themethodology is called equivalent linearizationanalysis.
In the method each gapped support orseismic stop in the mathematical model of thepiping systems is replaced with an equivalent
linear spring. The stiffness of the equivalentlinear spring is determined by mininMng themean difference of the support restoring forcebetween each equivalent spring and thecorresponding gapped spring. The mean
1

difference is an average over time across theresponse duration and is derived based onrandom viiration concepts. A summary of thedetailed formulations of the method asimplemented in GAPPIPE is provided in theUser’s manual for the code and is presented inthe following.
Figure 2 shows the force-displacementrelationship of a symmetric gapped support.Tle gapped support has a stiffness equal to 1$,after the gap is closed. Let g be the gap siz~ F
be the support force as a functionof the pipedisplacemen~% in the direction of the suppo~Kn be the equivalent linearized stifrness to bedetermined by a minimization process. ThefoUowing equation defines the dtierence, D,between the restoring forces of the gappedsupport and its equivalent linearized spring atany instance of time, t as
D@(t)) = F@@)) - Ii&r(t) (1)
The equivalent linearized stillhess isdetermined by ninimkhg the mean value of thesquare of the force difference, Eq. (1) over acycle. The mean square of the dtierence, D.over a cycle of vibration may be expressed ax
and the minimizationrequires
(4)
where klisthe linearized stiffnesscorresponding to quasi harmonic response andcan be seen as a constant over each cycle.
Using relations 1 and 4 Equation 5 provideswhere
km = :(tit)-g)“ when 1+ < g (2)
When lxI >g + Jo’r-=(’)+w’]dt=o (6)
Incorporating relation (3), and realizing thatand I I denotes that the absolute values of if d(t)=constank d8/dt=u, provides
x be used
Jfi - A Co& F(x) + k&2cot? 0 ]d&O(7)
For the case where the system is exhibiting 0
quasi harmonic response the pipe displacementmay be expressed = which yields
X(2) = A(t)cose(3)
wheree = (A +(t) for the equimlent linearized stiffness associated
with quasi harmonic response.and # is the phase angle.
During a seismic even~ the pipe response isIn the abov% although the amptitude and not harmonic. Th~ due to the randomness in
phase angle are time dependen~ they vary slowly displacement amplitudes in dynamic response,with time and are assumed to be constant over a the minimization of the mean squared differencecycle. needs to be performed using the methods of
2

random vibration. The minimization process ktherefore, applied to the expectation of themean square difference rather than to the meansquare itself.
Althoughthe pipe responseis not harmonicover the duration of the seistnicevent it can beassumed to be quasi harmonic over each cycle inthe response and to have a dtierent amplitudemagnitude associated with each cycle. Theresponse then would exhibit a spectrum ofdisplacement amplitudes and frequencies.
The expected value of the mean squareddifference can be expressed as
and mhimhing this quantity with respect to theweighted average of the equivalent linearized
spring, Km, over the time duration requires
d EfDJ ~ (lo)
dKm “
If it is assumed that the response is astationary, narrow banded proc~ K.. can bedetermined using the value of D. given byequation 4. Using Equation 4 and replacing klwith Km provides after dtierentiation withrespect to Kw
(11)
+xm Xqt))dz]dt ● =“o
Solving for Km yields
T
Jh ~ k1A2dtT+= To (13)
Km =Iim ~TA2&
fT-M To
or written in terms of the expectationoperator
E [A* kl]Km =
E [A”J(14)
Essentially this states that Km is theweighted average of kl(A) over all amplitudes A
The calculation of Km is carried out bynumerical means in an iterative manner until
convergence in accordance with an acceptance
criteria is achieved In genera~ the procedurebegins assuming that all linearized stiffnesses arezero as if the gapped seismic stops are notpresent. The pipe displacement responses atgap location are then calculated using theconventional reponse spectrum method. Basedon these respons% a new set of linearizedstiffnesses are calculated using the linearizationprocedure described above. With this new set oflinearized stiftlesses added to the piping system,the response spectrum analysis procedurerepeats. The iteration continues until thechanges in the linearized stiffnesses for all gapsare within prescribed tolerances.
This procedure is outlined step-by-step in thefollowing
Using equation 8 both expressions in this (1) Assume a null [Kn].equation can “be exprkssed in terms of the (2) Add [Kn] to ~.amplitude dependent equivalent linear spring (3) Perform the response spectrum analysisconstant for one cycle &l(A) and the amplitude to determine the maximum displacement
amplitudes at gaps
3

(4) Use the maximum d~iacernent
amplitudes to calculate a new [Km].
(5) Compare the old and new [Kw]’s to seeif the difference is within the prescribedtolerance for every gap. If alldtierences are within the tolerances, thesolution is converged.
(6) If the tolerance is exceeded by at leastone gap, a new updated [Km] iscalculated for use in the next iterationusing the following formula
. [I& Updated] = (l-b)[KW .D] + b[Kw -]where b is a convergence factor, b s 1
(7) Go to step (2) and process repeats.
The whole solution process is a repetition ofthe response spectrum analysis procedure. ‘Ihenonlinearity is embedded in the linearizationprocedure and the interaction between gappedsupports is inherently accounted for through theiterative solution.
3. MliiTHOD AND IMPLEMENTATION
As the first phase of the evaluation a reviewwas made of the literature for the equivalentlinearization method. It was found that themethod had clearly been investigated by manyauthors (l-5). Of particular interest were thepapers by W.D. Iwan (5-7) of CALTECH.. Headvanced applications of the method to estimatethe seismic response of systems supported bynonlinear elements using response spectrummethods. The method as implemented inGAPPIPE (S-10) closely paralleled theprocedures advanced by W.D. Iwan. Based onthe review, it was concluded that there was atheoretical basis for the metho~ it could provideameptable approximations of system response
and its basic implementation in GAPPIPE
followed the procedures recommended by arecognized researcher in the field.
Although the opinion of the method wasessentially positive, severaI questions regardiigits application to piping systems were raised.These were formulated and transmitted through
the project monitor to RLCA. The BNL.concerns wertx
(a) will the iterative solution process remainstable when a large number of gappedsupports exist in the system,
(b) conversely, is there a limit to how manygapped supports can be in a system,
(c) what is the sensitivity of the solutionmode to the chosen acceptancetolerance an~
(d) if appropriate, would the solutionpredict or aliow supports to remainopen.
Following the literature review a visit wasmade to the RLCA offices in Berkeley,California. A thorough review of thedevelopment and current status of the
GAPPIPEcode and the seismicstop concepttook piace. In the cmurse of the meetingdetaiied information cleating with the designconcept of the RLCA seismic stop and itsimpacton the nuclear industry,its mathematicalfoundation and its implementation into theGAPPIPE code were discnssed. In addition,information on physical tests conducted withpiping systems incorporating seismic stops wasprovided. These included results of the @R-SHAG, HDR-SHAM, and RLCA/EPRI tests. Afull listing of the information provided ispresented in Appendix A.
Discussions and the information providedduring the visit “brought a resolution to each ofthe BNL concerns. Examples demonstratingthat stable solutions were achieved for systemsincorporating numbers of seismic stops ofengineering interest were provided.
Figure 3 illustrates one such example. It
shows how the predicted or estimated value ofthe linearized spring constant (KJ and theresultant calculated value of the linearizedspring constant converge to a value within theconvergence tolerance. ‘Ihe illustrationcorresponds to the umvergence of one gappedelement in a piping system Figure 4,incorporating 16 gapped elements. Each cyclem-responds to making an estimate of Kti from
4

the prior results (shownby ❑ symbol)andcalculating Kti corresponding to this estimatebased ort a response spectrum solution for theentire piping system (shown as a + symbol).For the example shown, more than 50 iterations.were required to establish Km for the specificelemen~ and iterations would proceed untilconvergence within tolerance for all gappedelements was achieved.
In the examples instances where theconverged solution corresponded to thecondition that a gap remained open were shown.As a practical matter, in such cass the supportwouId be removed from the fi.trd design as itsinclusion in the system offered no benefit.
The complexity of the interaction is related tothe number of gapped supports in the system. Ithas been observed that the number of iterationsto achieve wnvergence is proportional to thisnumber and computational time increasesaccordingly. Regarding the convergencecriterion, a tolerance of 10% of the linearizedstiffness is used. This criterion appears toprovide estimates of piping system response withan accuracy consistent with thatassociated withresponse spectrum methods.
The physical tests for which results wereprovided were carried out over the years underthe sponsorship of RLCA and EPRI. They wereconducted to investigate seismic stopperformance, demonstrate their capacity tocontrol vibrations and to allow a comparison oftheir performance to other seismic motionrestraining mechanisms. For most tea~computations using the GAPPIPE code weremade to demonstrate the adequacy of itsresponse predictions. .
In the 1988 RLCA/EPRI tests the seismicresponse of a piping system supported andexcited by a multi-story frame was investigated.Two sequences of tests were conducted. In one,the piping was restrained by snubbers andsuppo~ in the other it was restrained byseismic stops and supports. The measuredresponses demonstrate that seismic stops provideas much control of system response as dosnubbers.
In the HDR-SHAGand HDR-SHAMtests apipingsystemin the shutdownHDR nuclearplant was subjected to operating level and highlevel simulated seismic excitations. In each testseries alternate support systems were used in asequential fashion to support and restrain thepiping. The support systems included a flexiile(soft) system a rigid (s@ system incorporatingsnubberq a system using energy absorbers inplace of snubbers and a system using seismicstops instead of snubbers. For all testscorresponding analytical estimates of systemresponse were developed. The test results againdemonstrated that the seismic stops controlsystem vibrations as well as other supportelements. lle post test analytical resultsdemonstrated that the estimates of systemresponse developed with GAPPIPE were asaccurate as the estimates of system responsedeveloped for the other systems usingcaventional analysis methods.
It was concluded after this review that the“seismic stop represented an acceptablealternative to conventional restraint devices,that the equivalent linearization methodologywas solidly based and its implementation byRLCA in the GAPPIPE computer codeappeared theoretically correct and competentlyperformed.
4. VERIFICATION ANALYSES
From the outset of the evaluation effort itwas intended that the performance ofindependent analyses to con6rm the adequacy ofthe seismic stops in the proposed applicationwould be a major element of the evaluation.Further, it was also intended that theindependent veritkation be performed using thenon-linear time history capability of thecomputer program ANSYS. Using a recognizedcomputer code in this application% it wasthough~ would enhance the credibili~ of theverification analysis results and preclude theirdiscreditation if they were unfavorable.
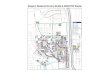
The problem selected for the verificationstudy was the Reactor Coolant Bypass Lme forByron Station-Unit 2. l%is is the exact line forwhich @mtnonwealth Edison requestedapproval for the application of seismic stops. Asketchdepictiig the systemand showingkey
5

nodal points in the fide element model for thesystem is shown in Figure 5.
The system consists of 8 inch, 1 1/2 inch, and3/4 inch SCH 160 type 304 stainless steel piping.System pressure is 2425 psi while systemtemperatures range horn 12(YF to 6180F withthe majority of the piping being at atemperature 55&F. The system includes onerelief valve, three check valves and four stopvalves. The system terminates at five anchorpoints and is supported by five rod hangers.The support system includes eight seismic stop$replacing thirteen snubbe~ to provide seismicrestraint.
The finite element model consists of 294nodes and 379 elements. The 8 inch pipeextends from node 203 to 238 the 1 M2 inchpipe from node 72 through node 180 to node212 and the 3/4 inch pipe, in two segmen~ from
node 7 to node 180 and from node 1 to node
. 115. Anchors exist at nodes 1,7,72203, and238 while vertical support is provided at nodes49, 10~ 117, 162 and 171. The eight seismicstops are located at nodes 39, 44, 55, 98, 147,151, 157, and 170. The stops at nodes 55,98,and 170 provide restraint in the Z coordinatedirectio~ the one at 151 in the Y direction,those at 39, 147 and 157 in the X and Zdirection$ and the one at 44 in the X and Ydirections. A summary of model parameters arepresented in Table 1.
All key parameters of the finite model wereselected to be identical to those used by RLCAin their qualification calculations for this system.Towards this end BNL requeste~ and RLCAdid provide, a complete description of the finiteelement model used in their evaluations. TheGAPPIPE input file listing (SAP V format) forthe dead weight analysis for the system satisfiedthis request. The parameters extracted from thislisting included geometry, piping temperature,pressure, section properties and weigh~ valvesection properties and weigh~ support stiffiqorientation and gap characteristics.
To proof test the BNL model both a deadweight and natural tiequency run were made.Table 2 provides a comparative listing of thenatural frequencies for the system. A can beseen, there is excellent agreement for the thirty
naturaI frequencies computed Although notshown, the jevel of agr~ment between-the BNLand RLCA estimates of displacements for thedead weight loading was also excellent. Theseresults substantiated that the ANSYS model wasan equivalent to the GAPPIPE model.
In the frequency determination above, springshaving location and orientation identical to theseismic stops were included in the model. Thesesprings were assigned stiffnesses equal to theestimates of linearized stiffness predicted byGAPPIPE. Given this the model test alsoassured that the location and orientation of theseismic stops were correct. For the non-lineartime histo~ analysis with ANSYS these locationsand orientations were retained but the true gapand stiffness properties of the seismic stops weremodeled A listing of the seismic stopparameters including the GAPPIPE estimate ofthe equivalent linearized stiffhess is presented in
Table 3.
The next phase of the evaluation was todefine the time “historyforcing function. Theevaluations performed with GAPPIPE wereenvelope response spectrum evaluations basedon N-411 damping and SSE input levels. Assuch, the loading was defined by three envelopeacceleration spectra for the three coordinatedirections, Figure 6. For the ANSYS analysistime history definitions of the systemaccelerations were required Accordingly, arequest was ma& to RLCA for the timehistories corresponding to the SSE spectra.Unfortunately, BNL was advised that the desiredtime histories were not available.
To accommodate the analysis needs synthetictime histories consistent with the SSE responsespectra were developed This was accomplishedusing a modiiied version of the CARESmmputer code. The code was modifiedspecifically for this evaluation to allow it toaccommodate the N-411 definition of dampinginherent in the design spectra. The resultantsupport SSE acceleration time history recordsfor the three coordwte directions are shown inFigures 7,8, and 9. As will be noted eachrecord is 15 seconds long and the peakacceleration levels are 1.01, 0.98 and 0.78 for theX, Y, and Z dwections respectively.
6

Three checks of the adequacy of the timehistory records were performed. These includeda comparison of the spectra derived from thetime history records with the target (Byron SSE)
spectr~ a determination of the power spectraldensity (PSD) cum-s for the time histories and adetermination of the degree of correlation thatexists between the time histories.
The comparison of spectra derived horn thetime histories (the generated spectrum) and thedesign spectra are shown in Figures 10, 11, and12. As can be seen, the level of agreement isgood with the generated spectra exceeding thedesign spectra to only a nominal amount. ThePSD curves corresponding to the time historiesare shown in Figures 13, 14, and 15. As can beseen, there is content throughout the frequencyrange. Finally, the correlation calculationindicated the correlation coefficient between X-Y as 0.04, between Y-Zas0.03 and between X-Z as0.003. In summary, the time histories werefound to be uncorrelate~ to have acceptablePSD’S and to provide spectra which match thedesign spectra to a satisfactory degree.
With the model and the input forcingfunction define~ the last piece of input
informationrequiringspecificationwasthedefinitionof damping. In the responsespectrumcalculations N-411 modal damping was used.That definition of damping could not be used inthe proposed ANSYS analysis. Instead for thenon-linear analy~s two coefticien~ a and /3,which quant@ system damping as a function ofthe system mass and stiffness matric~ must bedefined. The coefficients a and/3 were selectedto match N-411 damping at the frequencies of7.7 ~ and 20 I-$. This provided a reasonablebut not exact correspondence to N411 dampingover the frequency range 7 through 30 ~ withthe ANSYS damping being greater than 570 atlower frequencies and less than 2% at higherfrequencies. The selected values for a and/3were 4.8 and 0.0000143 respectively.
A. ANSYS Non-Linear Analysis
With all model and forcing functionparameters defin@ the non-linear time historyanalysis was performed. In the analysis thefollowing parameters and options were used. Asolution time step of 0.0005 sec. (should be
sticient to capture a 200 ~ event). TheNewmark implicit direct integration solutionoption with 6=0.5 and ~=0.25 (minimizesnumerical damping). The Newton Raphson
initial stiffness optiou KAY(9)=3 (stiffness
matrix is only reformed When the status of any. gap element is changed). KEYOPT(3) set to
one to account for the additional flexibility ofbend elements. The plasticity convergencecriterion was set at 0.01. This criterion definesthe allowed global system force unbalance aftereach iteration and was selected after several trialruns.
The output results were quite extensive.Selected d~lacemen@ force and stress resultswith comparisons to the correspondingGAPPll?E response spectrum results arepresented in Tables 4,5, and 6.
The displacement results, Table 4, arepresented cmrespondmg to each piping sectionas defined in Table 1. For each sectiondisplacements are presented for each node forwhich a maximum displacement was predicted inthe RLCA GAPPIPE solution. Maximums foreach coordinate direction are presented. In thetable the number in parenthesis is the
corresponding value from the RLCA calculation.As can be seen, the ANSYS and GAPPIPEresults compare reasonably well for the X and Ycoordinate directions but less well for the Zcoordinate direction.
Table 5 presents a listing of the maximumvalue of each component of reaction force foreach support element in the system. Thisincludes the he ancho~ the five rod hangersand the eight seismic stops. The correspondingGAPPIPE estimates are listed in the columnheaded RLCA. For the seismic stops the RLCAestimates are impact forces computed based onthe calculated displacements at the stops and thetrue stop spring sti.ffnesses (i.e. not thelinearized approximations). A review of thetable will indicate that the degree ofcorrespondence between the ANSYS andGAPPPIPE results are poor. Ihcept for theseismic stop% the ANSYS estimates of reactionforce exceed the GAPPIPE estimates of reactionforce by factors ranging horn 50% to a order ofmagnitude. For the seismic stops the trend isreversed with the GAPPIPE estimates exceeding
7

the ANSYS estimates by as much as a factor offive.
Table 6 completes the result presentationwith a summary of the maximum predicted pipestresses for each section. The stresses werecomputed as indicated with no correction forstress intensification. A with dispkicemen~ thelisting is for those locations where the GAPPIPEcode predicted a maximum. A review of thetable will indicate that the correspondence ofresults is fair with the GAPPIPE estimate of thepeak stress exceeding the ANSYS estimate bylo%.
The great disparity of reaction force resul~and in particuk, the fact that the GAPPIPEestimates of these were so low, was a greatconcern. The ANSYS input data files weresearched in detail for errors but none werefound Discussions were held with the ANSYScomputer aid sewice but they could onlyrecommend that the calculation be repeated
using an entirely different approach. The use ofdifferent computer codes was aIso consideredThe last IWOoptions were rejected as they wouldrequire large new investments of resources whichcould not be accommodated. Finally, a copy ofthe ANSYS job deck was transmitted to theANSYS computer aid sewice for their review.
B. ANSYS Iinear Analysis
Given the significant disparities noted it wasdecided to a~ent the ANSYS non-Iinearanalysis with linear analyses performed using theANSYS model. In particular, two responsespectrum calculations were made. In onecalculation all the seismic stops were eliminatedfrom the model. In the other calculation, all theseismic stops were included with their stiffnessset to the closed gap stiffness. The twocalculations then bounded the operatingconfigurations of the seismic stops
The results for the response spectrum runsare shown in Tables 7 and 8. Table 7 providesthe displacement results while Table 8 providesthe reaction force results. Tkse tables alsoinclude a listing of the GAPPIPE and ANSYSnon-linear time history results presented earlier.In the table, the column headed RLCA are theGAPPIPE results, the column headed T.H. are
the ANSYS non-linear time history results, thecohmm headed RSR are the response spectrumresults with all seismic stops closed, and thecolumn headed RST are the response spectrumresuhs with all seismic stops open.
A review of Table 7 shows that the tworesponse spectrum estimates of maximumd~lacement typic-dy bound or are inreasonable agreement with the GAPPIPE andT.H. results. A review of Table 8 shows thesame level of agreement between the responsespectrum estimates of reac:ion force and theGAPPIPE estimates for those forces. Theagreement with the T.H. estimates of thereaction force are poor. In many instances theT.H. estimates exceed the response spectrumresults by large amounts. The disparities are infact comparable to the d~arities noted earlierbetween the GAPPIPE and T.H. results andwhich were the source of concern. Theseresponse spectrum results lend credlMlity to theGAPPIPE results and discredit the ANSYS non-
linear analysis resu@ at least for the estimatesof support forces.
C. Follow On
At a later date the ANSYS computer aidsemice group advised BNL as follows
a)
b)
c)
d)
8
A run made using the BNL ANSYS fiIereproduced the BNL results includingthe high reaction force estimates.
Using a smaII subsection of the modeland the same computational parametersagain resulted in high reaction forceestimates.
Using the subsection model andprogressively smaller time step sizesproduced estimates of the reactionforces which were progressively smaller.
A reduction of the time step sizeby afactor of 250 produced a reduction ofthe original force estimate by a factor of100.
Based on the above, the time step usedin the BNL analysis was far too coarse.

e) Thedifilcuhyiu part lies in the fact thatANSYS uses the enforced grounddisplacement as input. Specification ofenforced displacements is notrecommended when using the NewmarkBeta method since this methodintroduces discontirtuities inacceleration.
f) lhe model should be reordered tominimize the wavefront. Reorderingcould reduce the CPU time by a factorof 100.
D.Observations
The estimates of support force developed inthe ANSYS non-linear time history analysis arenot considered reliable. The reduction inintegration time step size apparently needed todevelop reliable results would burden thecomputing capacity at BNL and is consideredimpractical. The estimates of piping systemdisplacements and the resultant stressespredicted with this analysis are comparable tothose predicted with the response spectrummethods and may be more reliable.
‘Ihe response estimates developed with thetwo bounding linear response spectrum analysesshow good agreement with the responseestimates developed with the GAPPIPE code.For many response quantities the GAPPIPEresult was bounded between the two responsespectrum estimates. For those instances wherethe GAPPIPE estimates fell out of the boundsof the two response spectrum solutio~ thecorrespondence between solutions were stillrelatively close. The good correlation achievedin this phase of the study “lend confidence in theadequacy of the GAPPIPE response estimates.
5. ANSYS VERIFICATIONANALYSIS
Owing to the poor response predictionsdeveloped with ANSYS it was decided toperform some analysis to verify the capabfity ofthe ANSYS non-linear time history analysisoption with gapped spring elements. A problemselected for this purpose was a threedimensional pipe bend supported by two anchorsand restrained by three gapped springs. Thisproblem was used by researchers at
Westinghouse(11),RLCAand BNL (12) to testanalysisoptions based on the pseudo forcemethod of analysis. The results developed bythe three organizations were essentially identicaland can seine as a benchmark.
A sketch of the system is shown in Figure 16.A computer generated isometric of the finiteelement model of the system is shown in Figure17. As shown, the three gapped springs arelocated at nodes 4, 6, and 10 and each acts in adifferent coordinate direction. The excitation isintroduced by three time varying forces acting atnodes 4, 6, and 10 in line directions to close thegaps. The time history traces of the appliedforces are shown in Figure 18. The gap size andspring stiffness at the three gapped springs are0.250 in.L?.o E+06 Win., 0.125 i.rm.oE+06lbdii. and 0.062 in./l.5 E+06 lb.lii. for nodes 4,6, and 10 respectively.
The predicted spring force versus time foreach of the gapped spring elements are shown inFiiures 19,20,21. These were developed usingthe same time step (0.000062S) as was used inthe pseudo force test rum Each figure shows inbet two time history t- one correspondingto the ANSYS run and one ~rresponding to theBNL pseudo force ru~ overlayed on oneanother. As will be not@ very little indicationthat there are two traces is apparent indicatingthe good agreement of re.sdts achieved for thegapped spring forces.
Table 9 shows the corresponding tmmparisonfor anchor forces. The agreement for theseparameters is not quite as good. Difference inboth the times of peak occurrence and themagnitudes of peaks is apparent. Although thedifferences are not great they may be indicativeof the type of d~arity noted in the seismic stopanalysis. Unfortunately, the data base foranchor forces is only the BNL pseudo forceresults and their reliability as benchmark valuesis less clear.
In summary, for this problem the ANSYSestimates for gap spring forces are in excellentagreement with the “Benchmark” resuhs. Foranchor forces the agreement is only fair to goo~but certainly much better than obtained in theseismic stop problem. The discrepancies%however, may indicate that one might expect
9

larger disparities for more complex systems.
The development of a solution for a secon~simpler, verification problem was also attempted.This problem was a cantilever beam whose freeend displacements are restricted by gappedsprings. This problem was also one of the setused by several researchers to test theirimplementation of the pseudo force analysismethod.
Figure 22 shows a sketch of the problem andthe ground acceleration loading function. The20 inch long beam was modeled with 20 equallength beam elements and 2 gapped springelements on each side of the beam encJ asdepicted in Figure 22A. The material andstructural properties of the beam were taken ~Young’s modulus, 30x 10s psi Poison’s ratio,03; cross section, 2“ x 3“; moment of inert@ 2in4; and mass density of 0.0042 Ibisdjii. Thegap clearance was 03x 103 in., and the springstiffness was 2 x Id lblin. The excitation wasthe ground motion acceleration time @stoty “
depicted in Figure 22B.
SeveraI attemptk were made to develop asolution to this problem. In the first attemp~the ground motion accderation record was usedas input and the integration time step was takenas 0.00003125 secon~ the value used byresearchers in the pseudo force investigationsSince poor results were achieve~ the initialattempt was followed by several more each witha finer integration time step, ending when a timestep 1/10 the origin~ or 0.00000312S secxm~was used The results still being deficienganother tact was then followed. In these newattempts the input excitation was defined as timevarying forces acting on each mass point withthe values of the force being derived from theacceleration record. This series of calculationswas performed for the same time step sizes asused in the initial series. Again, poor resultswere achieved Efforts were concluded whencalculations with a time step reduced by anotherorder of magnitude yielded dtierent results.
The predicted relative d~lacement withrespect to ground at the cantikwer free end forthe last and equivalent cakulation in each seriesis shown in Figure 23, with the upper figurecm-responding to the acceleration input option
and the lower figure comsponding to the forceoption. Clearly, they are different. Thepredicted displacement at the free enddeveloped with the pseudo force metho~presumably the correct Solutio% is shown inFigure 24. As can be seen, there is littleapparent correspondence between the solutionsdeveloped with ANSYS and the pseudo forceresult. Close examination reveals that the forceinput solution at least shows correspondence ofthe number of peaks and valleys in the solutionas compared to the pseudo force solution.
For this problem the verification attemptswere all a failure. PossIMy, if the attempts hadbeen continued with finer and finer integrationtime step% an improvement in results mighthave been achieved However, that option wasimpractical given the resources available.
This verification problem represented a closerparallel to the Reactor Coolant Bypass line thanthe first problem in that the forcing function was
a ground motion aweleration time hiatoty.
These poor results coupled with the poor resultsobtained for the bypass line may be indicative ofa deficiency in ANSYS for this mode ofexcitation.
6. CONCLUSIONS
The evaluation followed two phas+ a reviewof the theoretical basis for the equivalentlinearization method and its implementation intothe GAPPIPE computer code and verification ofGAPPIPE through confirmatory analyses. It wasdetermined that the method had beeninvestigated by many researchers whoestablished a theoretical basis for the metho~explored its range of applicability and quantifiedthe accuracy to be expected in its application.The adequacy of its implementation into theGAPPIPE code was demonstrated by the facilitywith which the code cxmld handle variousproblems and the correspondence of its responsepredictions with test results. The confirmatoryevaluatio~ although compromised to someextent by the poor performance in the non-linear calculation-d mode, confirmed that theGAPPIPE code did provide acceptable estimatesof system response.
10

Based on the evaluation, the followingobservations and conclusions are made
. Properly designed seismic stops (gappedsupports) can be as effective as snubbers incontrolling seismic motions.
o Acceptable estimates of the response ofsystems incorporating gapped supports can bemade using an equivalent linearizationmethodology.
. The implementation of the linearizationmethodology into the GAPPIPE computercode appeared correct and competentlyperformed.
. Response estimates developed withGAPPIPE should exhitit an accuracyconsistent with the response spectrummethodology.
. The support force estimates developed withGAPPIPE should be interpreted as timeaveraged approximations of these quantities.
. Accurate estimates of instantaneous or peaksupport forces or support force estimates thatare in global equilibrium should not beexpected from GAPPIPE.
● In general the method can be expectedtoprovideconsemativeestimatesof supportforces.
7. REFERENCES
1. Caughey, T.L” “Equivalent LinearizationTechnique%” Journal of the Acoustical Societyof Ametia, Vol. 35, No. 11, 1963, pp. 1706-1711.
2. Iwan, W.D., “A Generalization of the Methodof Equivalent Linearization,” InternationalJournal of Nonlinear Mechaniq Vol. 8, 1973,pp. 279-287.
3. Lute% L.D., and Takemiy4 H. “RandomVibration of Yielding Oscillator: Journal ofthe Enginedng Mechania DivirionProceedin~ ASCE, Vol. 100, No. Eh@ Apr.1974, pp. 343-358.
4. We@ Y.K., “Method for Random Vibrationof Hysteretic Systew” Journal of EnginetigMechanics Divtin Proceedings, ASCE, Vol.10% No. Em Apr. 1976, pp. 249-263.
5. Spano% P.T. and Iwan, W.D., “On theExistence and Uniqueness of Solutions
Generated by Equivalent Linearization,“International Journal of Nonlinear MechanicsVol. 13, No. 2, 1978, pp. 71-78.
6. lwan, W.D., “The Earthquake Design andhalysis of Equipment Isolation Systems:Earthquake Enginetig and StructuralDynamics, Vol. 6,1978, pp. 523-534
7. Iwan, W.D., “Application of Non-linearAnalysis Techniqu~” Applied Mechanics inEarthquake Enginee@ AMD-Vol. 3, ASME,N.Y., 1974, pp. 135-162
8. Cloud R.L, Anderson, P.H., and Leung,J.S.M., “Seismic Stops vs. Snubberq AReliable Alternative: Nulear Engine&g andB% 107, 1988, pp. 205-213.
9. Leung, J.S.M., Tang, Y.K, Yang, M.S.,“Analysis of Piping Systems with GappedSupports Using the Response SpectrumMethod!’.
10. RLC4 GAPPIPE User Manual.
11. Molnar, A_Jv Vasl@ K-h& and Gay, C.W.,“Application of Normal Mode Theory andPseudo Force Methods to Solve Problemswith Nonlinearitid’, Journal of PressureVzssel Technolqy, May 1976, pp. 151-156.
12. Bezler, P., Prach- S., and Hartzman,M., “Nonlinear Dynamic Analysis of PipingSystem Using the Pseudo Force Method”,BNL-NUREG-27834, January 1980.
11

sEC
1
2
3
4
5
PIPE SIZE(INCHES)
3/4
1 1/2
3/4
1 1/2
8
REACTORCOOLANT BYPASSLINE MODELPARAMETER
TABLE 1
NODE FROM
1
68
121
178
203
RANGE TO
68
120
177
202
238
-=d------+--H-+-=-
VERTICAL SEISMICSUPPORT STOPS
49 39, 44,55
117 98
171, 162, 151, 147,102 157, 170
l,,
,
* Pjpe node where support-, anchor,. or seismic stop is located.

TABLE 2
CO~AllON OF NATUu FIEQUENOYREACTOR COOLAi$i 9YSTEM BYI%SS LINE (LOt3P4)CALC(JLATRD FROh!‘NO DIFFRRENTCWdlWi%RPROWHS
B.N.L R. C.L.A(AN8YS) (wPm)
H(IDE PREQU13NCY(CYcLEs/8Bo) :
i34567a91011
;:1415161718192021222324252627.282930
5.0525.8406.2667.5237.7918.9909.77010.44911.05814.14814.69415.16015.%1416.84617.47018.81319.28519.966 .20.24520.83721.40623.05623.84826.4782S.69127.76729.84331.225 ,32.446
‘ 34.555
. .
5.052 :5.8406.2667.5387.8178.9909.77110.45811.06114.18614.70115.16715.924“16.97917.47018.85419.32419.98920.27820.84221.41323.06123.87126.47826.6S627.76729.82631.22432.44734.570
-.
13

TABLE 3
flEISMICSTOP PARAMETERS
NODE LOCATION
II 39
II 44
55
98
147
151
157
170
SUPPORT STIFFNESS STOP STOPSTOP CLOSED LEFT SIDE RIGHT 81DE(LB./IN.) GAP (IN.) GAP (IN.)
, 15,000 0.400 “ . 0.000
5,000 0.000 0.810
2,800 I 0.000 I 1.250
5,000 I 0.000 I 0.910
15,000 I 1.160 I 0.000 “
15,000 I 0.000 I 0.1002,800 I 0.000 I 0.830
2,800 I 00000 I 1.384
*
=+
GAPPIPELINEAR ESTIMATE
(LB/IN.)
1042
518
200 I
-++

. .
.
.
TABLE 4 - NODAL DISPLACEMENTS (Ii?. )
SEC NODE x Y z
1 47 0.84 (0.92)*
45 0.13 (0.14)
58 0.95 (0.78)
2 100 0.49 (0.50)
105 0.05 (0.1)
105 0.95 (0.35)
3 161 0.60 (0.52)
121 0.12 (.0.20)
155 0.63 (0.45)
4 183 0.25 (0:22)
188 0.15 (0.13)1.01 (0.37)
177
5 221 0.13 (0.14)
217 0.11 (0.10)
220 0.17 (0.16)
* Max. nodal displacement (in inches) values i.n parenthesis areRLCA results.
15

TABLE ~ “ - REACTION FORCES(lbs. or in./lbs. )
TYPE I NODEJ
ANCHOR
NCHOR
1
7
72
203
COMPONENT
x
xx
Y
YY
z
Zz
x
xx
Y
YY
z
Zz
x
Y
z
xx”
YY
Zz
x
Y
z
xx
YY
Zz
16
RLCA
76
548
120
3,402
91
4,695
82
4,098
133
3,376
34
2,857
13.9
119
134
4,920
4,890
6,130
2,615
3,091
1,494
167,373
152,435
132,556
BNL
2,229
179
7,501
265
6,027
846
4,385
145
6,666
1,950
2,220
2,407
2,045
2,003
17,130
7,025-
21.660
115,100
28,540
110,800
493,600
890,200
540,900

. .
TABLE ~ ‘- REACTION FORCES(lbs. or in./lbs.)
.
TYPE NODE COMPONENT ‘ RLCA BNL
ANCHOR 238 x 3,328 34,730
Y 5,018 “11,530
z 3,862 18,940
m 177,701 177,800
YY 383,289 521,500
Zz 335,763 471,100
VERTICAL 49 74 340SUPPORT .
102 163 503
117 316 412
162 35 ‘“ 182
171 13.1 427
SEISMIC. STOP 39 506 91
44 407 113
55 453 181
98 618 470
147 208 X34
151 116 158
157 267 148
170 452 281
17

TABLE 6 - MAX . PIPE STRESSES OF EACH SECTION
SEC ELEMENT NUMBER STRESS (lcsi)
IBNL RLCA
I ST RAIGHq? PIPESi I i
II 1 I 67S I 18.5 I 22.6
2 1121 10.8 9.4
3 177S 20.7 22.5
II 4 I 1941 I 15.8 I 10.8
\ 5 I 235J I 14.1 I 9.3
ELBOWS
1 101 16.8 I 15.8
2 95M 10.5 8.2
3 245M 10.7 13.1
4 193J 18.0 10.8
5 2091 9.6 3.2
*NO stress intensification factor applkd
s = (M* + M@ + MZ2);n
z
18

.
TABLE 7 - MAX. NODAL DISPLACEMENTS [IN.~
.J3ROOKHAVEN NAT IONAL LABORATORY
SEC NODE . COMPONENT RLCA+ IKiB RSF
1 47 x 0.92 .84 0.33 0.88
45 Y 0.14 .13 0.12 0.74
58 z 0.78” .95 0.54 1.09
2 100 x .50 .49 0.53 0.65
105 Y ● 10 .05 0.35 0.06
105 z .35 ●95 0.11 1.40
3 161 x .52 .60 0.34 0.83.
121 .Y .20 ,12 0.17 0.2
155 z ●45 .63 0.53 1.0
4 183 x .22 .25 0022” 0.21
188 Y ● 13 ● 15 0.13 0.13
177 z ● 37 1,01 0.09 1.51
5 221 x .14 .13 0.14 0.12
217 Y ● 10 ●11 0.1 0.1
220 z .16 .17 0.17 0.16

2’A$LE~ - REACTION FORCES
TYPE
ANCHOR
ANCHOR
NODE
1
7
COMPONENT
x
Y
z
xx
YY
Zzx’
Y
z
xx
YY
Zz
(Ibs. or h./lbs. )
RLCA
76
120
91
548
3,402
4,695
82
133
34
4,098
3,376
2,857
BROOK1iAV
ToH.
2,229
179
265
728
7,501
6,027
846
, 145
1,950
4,385
6,666
2,220
J NATIONAI
RSR
75
142
54
589
1,843
5,597
96
87
87
2,468
3,463
2,196
JABORATORY
RSF
73
155
136
458
5,700
6,200
268
159
200
5;720
13,285
2,937

IJ38 - REA CTION FORCES
,
TYPE
ANC1iOR~
ANCHOR
NODE
72
203
COMPONENT
x
Y
z
xx
YY
Zzx
Y
z
xx
YY
Zz
(lbs. or in./lbs.)
..I
RLCA
119
119
134
4,920
4,890”
6,130
2,615
3,091
1,494
167,373
152,435
132,556
PROOKHAV
T.H.
2,407
2,045
2,003
17,130
7,025
21,660
115,100
28,540
110,800
493,600
890,200
540,900
N NATIONAL
RSR
144
122
150
5,865
5,355
6,510
2,546
3,007
1,496
105,400
149,000
130,600
J!BORATORY
RSF
171
184
273
7,216
11,050’
9,250
2,005
2,4.16
1,492
142,840
125,594
106,103

>.
I
22

.,
Nu
TABLE a - REACTION FORCES(lbs. or in./lbs.)
,
TYPE NODE COMPONENT RLCA J3ROOKHAVENNATIONAL LABORATORY
U?.H. RSR RSF*
SEISMIC 39 x&Y 506 91 92 0STOP
44 x&Y 407 113 103 0
55 z 453 181 144 0
98 z 618 470 387 0
147 x&z 208 134 202 0
151 Y 116 158 100 0
157 x&z 267 148 101 0
170 z 452 281 198 0
* The spring elementsar~ removed in this case,

TABLE 9,
MCI OR F{ ORCE$ COMPARISON FOR HOVGOARD MODEL “
PSEUDO FORCE METHOD ANSYS
ANCHOR NODE FORCE COMP. VALUE TIME (SEC) VALUE TIME (SEC)
1 FX 1.72E6 0.275 1.80E6 0,283
FY 1.17E6 0,231 ‘ 1.30E6 0,101
FZ 0.57E6 0.262 0.59E6 0.216
MX 0.07E6 0,193 0.09E6 0.271
MY 0.67E6 0.156 0.79E6 0,216
hlz 1.56E6 0.231 1.71E6 0.101
12 FX I,07E6 “ 0.2 1.25E6 0.203
FY 0.65E6 0.268 0088E6 0.224
FZ 10C)5E6 0,193 1.09E6 0.261
MX 0.19E6 0.15 1.19E6 0.224
MY 1.39E6 “ 0.193 1.64E6 0.277
MZ 1,0E6 0,268 0.21E6 0.246

Nul
CCWJL4E4 7-U ri WA?97VJUGF’if%ud C2e &iQutEtw%n-
K&l
,PXn?I?r07/oo$5eo , M
/ E2’’J’J’-KKi$K~...~mml j
I
/25
-w!P’ 3’
2
~ #’2yj3QL/’4 Jku”

Figure 2 Force-Displacement Relationship of ASymmetric Gapped Support
26

-.
.
0x\z
0035
0,3
0,25
0,2
0,15
001
0,05
0
EXAMPLE I CONVERGENCE, STOP 11KG=1OO,OOO LBS/INCH
1
~gJ-.L I I 1 & [
0,720,681
0,52 0,56 0,6 0,64 0,76
DISPIJK!I!MIIN’I’(lNCIi)
FIGURE 3
060

x
—:
28

.
i
{
‘%..ly.lg
-
\. Y’..
29

3.s
3.0 [7
u“
2.0
1.s
1.0
0.s -
0.0 ~o -M
musxwr (l&)
BYRON UNIT 2 - RCS
FIGURE 6
an
, 4
\
I J40
2RC19/04

1--1x
om“
o
.
— 1I I ,
I
I1:
I o
t-1 . In .
f
I I
1- I zcdu)
iI I
I 1 -
7. - GLJm
CsiI.
I
xaz
1
I I I II
I I 0(d
I
I 0.v
1-1 I
I II
t —Ix I I -
cd 0
I 4I [
LZO” I f19:o 00:0 89:0- Zo . i-
(El1 NoIwwlmw
31

. .
0
ro“ml
I I I I I I
‘o-a“
a
-GI 1 II
II
%
0“--
II II -
-
f+
Iom“
.-==i-
om“
t I—-
II
1“
wu) I-1 I0
1 4— —J
— i
u)
66

N
LJmu)
I !
i
1~
I!
I
1
I~__1
I
II
I l—
B I II I
I
!
I}
I
I IZsio 9Z:0 00:0 9Z:o-
iZs“o- 8L”I
(3) NoI.r.twllmad
33

5SE XMfiX RCCE (G) 3.68
FITFREO (HZ) 11.50ITER. NO. 5
1t
t
nP(2)-
Ro“
s?1[
LEGEND
GENERflTEDSPECTRUM
DESIGN SPECTRUM...............................................*....
::,::‘9,:.
I I I I I I I I i I
10°I I I 1 I I I I 1
10’I I
FREOUENCY (HZ]
FIGURE 10

In
.
2&uf-
m
c1
.
-Nz
::.::.
S!”!2 Os:I00’E sio 00-(
.
.-o
“o
70-
n
35

N
09m
-
!2
o
c1u%
:.
:.
n
2-
-0
36

=-1a>
o0
n
!2u%!L
xcdLntn
-=r-
.-0
-
‘o

.
I
-=&L-==!s
=25-
1 i 4 i i 111166 i I b 11 i i
,0I 1 I i b
,0 I ~oi’ 1$
,oi.’‘‘I II
.0iiI i & I I I
,.01:
38

s!.
0mo-xaE
N
w(n(n
00
●
Ns
0r.dClzL*a
,.
,0L
o

7-[$6.I
/
1‘2
30 PIPINGSYSTEM
FIGURE 16

,
.
41

“.
$IA I
CuIL
II :
E!!u --G
%I
II
’05 SEC
——.— __, _ .—.
(f))
~
IN I03 SEC
AFFLIED FORCINGFUNCTIONS
.
FIGURE18
42

——.. . .
1
NT.0.400E+~
0.360E+[
0.320E+[
0.280E+(
0.240E+[
0.200E+(
0.160E+(
0.120E+(
800000
400000
0
~ FIGURE 19
SPRING FORCE NODE4
0.12
I—
0.2I
0.28 0.36
ANSYSSEP 30 .14:35: -PLOT NPOS~26
Zv -1DIST=O~F R()YF -OZF -O

— —.. .— — --— - I——- .~_. ——— —.— -—------—— ._. —L--—.— -—— —— -—- — -. . -—--— ..-. -. . . J
—— ——-— ——
=-l-—...—
—LV - — -— —.— —- —- —+=F— z———. ,---—.——-.——-—-- ——.-————— 44— -- —...- -—-— ——— -—. — —-.—-— — .—.- .— —.— . — -.—- --— ——“-—-—-—-
. . .. —-- - -—-. — ——— —— —-—— —. — —— 1—.—-
— ---- ~ —. .— ——~ — —-— ---.-_z3i—————————-—-.—_—_I &——— —— —. —— -.-——.—.— -- ---- — -—— —-—------“= “---~ --
-—--——..——— 3————--—==--—-.——-—-—.—.-—- -—— —— -—— — . .— —-- - - J
_=-_— —-- ---- ----—-- —.— —
~
_ ----— ———-- —-- . *o——- -.
c=- —“— —-— --— 4. -’—_-— — ‘
*— --.---l
i
!
!I
i
-0
a.~.-- ---- -. I_ o
Ii
,
44

1
@oOooo
900000
0
-400000
-@ooooo
-o. a20c4
-0. 1608f
-oo200@
-Oe2408~
-o ● 200B’
-0 ● 3201t’
FIGURE 21
$PRING “FORCE NODE 10
. .
I? I I I ~J----&z, I
m.I
o O.oa ● 0.32 I 0.4‘ 0.04 0.12 0.2 0.3U
.. ... ... .-.. —- ———.. -—. ..— — -.-——- ---- —— - ----. — .-— .—--...——..— .- ----
Muss~3: .
&IMu”

., .
‘m
~s THE CANTILEVER BEAM MODEL
+10
●
-IrIQ
3.FIGuRE22 (A & B)
46 ‘1/

. ..
,. ,, .
ii
In lx
FIGURE22A,DISPLACEMENTTIMEHISTORY, ACCELERATIONINPUT
:1 Vx
./f
/
[
,, /
k“
//
/
● ●ex=z ● ●*Z7S
FIGURE23B,DISPLACEMENT
● .aaczs ● .8917s S.atxzs
TIMEHISTORY,FORCEINPUT
47

TIME X 10-2 (SEC)
FIGUREZ4 . DISPLACEMENTTIMEHISTORY
?SELJDOFORCE ANALYSIS

APPENDIX A

A.
B.
c.
D.
E.
F.
G.
H.
I.
J.
PACKAGES OF INFORMATION PROVIDEDFOR STAFF REVIEW
OF COMPUTER PROGRAM - GAPPIPE
GAPPIPE User Manual and instruction for using GAPPIPE on the RLCA VAX Computersystem.
CECO Piping Application calculation Package, including piping description, model dat~ andGAPPIPE input/output listings (RLCA Calc. No. P182-1/02 Rev. A).
HDR SHAG post-test analysis data files and calculation reports on the comparison of GAPPIPEanalysis results with test data for both Seismic Stop and Snubber support configurations.
Preiiminaxy HDR-SHAM post-test calculation reports. (RLCA Calc. No. PIO1-10/21 Draft).
Copy of SHAM post-test technical paper by C. Ko\ et a~ at the 16th Water Reactor SafetyMeeting (taken from NUREG/CP-0097).
RLCA caiculatiorr report on the implementation of Nonlinear Time History Analysis using thePseudo-force Method in GAPPIPE (RLCA Calc. No. P94435).
ANSYS model data and analysis comparison with the 1985 RLCA/EPRI Shake Table Testa.
Data piots of snubber and Seismic Stop responses horn the 1988 RLCA/EPRI Shake TablePiping System Tests.
Input/output printout and plots of GAPPIPE analysis of sample piping systems illustrationsolution convergence and gap behavior.
Copy of ASME/PVP paper on the Pilot Study of Seismic Stop Pipe Supports at Millstone Unit 3.
A-1