Embed Size (px)
DESCRIPTION
introduction for beging and make a 3d pinter prusa mendel iteration 2
Citation preview

UNIVERSIDAD DE EL SALVADOR FACULTAD MULTIDISCIPLINARIA PARACENTRAL
DEPARTAMENTO DE INFORMATICA INGENIERIA DE SISTAMAS INFORMATICOS
Ponencia para el congreso COMPDES 2013
“Impresora 3D Prusa Mendel Iteration 2, Imprimiendo ideas”
Autor:
Romeo Alexander Muñoz Rodríguez
Facilitador:
René W. Rivera
31 de Mayo de 2013.

Introducción
En este documento se pretende describir un proyecto muy interesante como lo es
fabricar una máquina capaz de imprimir diseños 3D digitales diseñados en cualquier
programa CAD que nos permita exportar el modelo a formato STL.
Una máquina con esta capacidad es de gran potencial para el desarrollo de
investigaciones experimentales importantes en el área de la robótica y en muchas
otras áreas de las ciencias en general como en medicina imprimiendo prótesis a la
medida del paciente, arquitectura imprimiendo estructuras de casas a escala, y en el
hogar en general ya que representa una mini fábrica.
Con esta tecnología cualquier persona tiene la oportunidad de inventar y crear
productos sorprendentes imaginados en su mente, diseñados en la computadora y
traídos al mundo real por una impresora 3D.
En este caso la investigación se centra en impresoras libres denominadas REPRAP
(Replicating Rapid Prototyper) o Replicante de prototipo rápido, es la primera máquina
capaz de clonarse a sí misma ya que están construidas con muchas piezas que son
imprimibles por lo tanto al tener una se puede usar para fabricar otra impresora o
cualquier otra máquina, las posibilidades prácticamente son infinitas solamente
limitados por la imaginación de cada persona.
Existe mucho apoyo a este proyecto de hardware libre en cuanto al desarrollo
constante y a la documentación generada, cosa que se deben aprovechar para
apropiase del conocimiento y posteriormente generar nuevas ideas en el proyecto
REPRAP o en otros de hardware libre similares.
Objetivos
Objetivo general
Exponer información sobre “Prusa Mendel Iteration 2” y las ventajas que
conlleva el poseer una de estas máquinas para generar interés del público en
apoyar proyectos de hardware libre.
Objetivos específicos
Explicar en qué consiste el Hardware Libre.
Mencionar las piezas necesarias para construir una impresora 3D “Prusa
Mendel Iteration 2”.
Describir los pasos necesarios para la construcción de la máquina, así como las
dificultades encontradas en cada paso.
Identificar el software necesario para controlar la impresora desde la
computadora y el firmware instalado en la máquina.
Indicar las diferentes calibraciones necesarias para el buen funcionamiento de
la impresora.
Comentar sobre los diferentes materiales plásticos usados para imprimir las
piezas.
Revelar imágenes con piezas impresas en la impresora 3d construida.
Mostrar la máquina en funcionamiento.

¿Qué es open hardware?
Son todos aquellos dispositivos hardware de los cuales se tiene a disposición de todo
público la documentación necesaria para construirse, tales como especificaciones,
esquemas estructurales, de circuitos y pasos para obtener el dispositivo terminado.
Es importante tener en cuenta que el hecho que los dispositivos estén categorizados
como hardware libre no significa que construirlo es gratis, si no que el conocimiento
para su desarrollo es libre al público, una vez que se ha construido cualquier proyecto
de hardware libre perfectamente se puede vender o hacer lo que se desee con él.
Para que un dispositivo sea libre debe tener un soporte legal, y para ello existen varias
licencias a la cual se puede apegar el proyecto una de las más usadas es GNU General
Public License, esta licencia legalmente formalizada proporciona cuatro libertades al
público en general, las cuales son:
Copiar la información que se desee
Compartir la información con quien desee
Estudiar la información obtenida
Modificar la información obtenida para mejorar el trabajo
Este último punto es uno de los más importantes ya que permite que muchas mentes
brillantes trabajen juntas para desarrollar nuevas tecnologías.
Con esta licencia además se obliga a los usuarios finales que hicieron uso de la
información y con base en ella crearon otros proyectos, a que estos nuevos proyectos
se publiquen bajo la misma licencia y que de esta manera el conocimiento siga siendo
de libre distribución.
En un principio esta licencia se utilizaba mayormente para el software, pero el
hardware también se ha apegado a esta filosofía, permitiendo que muchos proyectos
interesantes lleguen a las manos de todo el mundo.
Impresora 3D
Las impresoras 3D no son algo nuevo, de hecho las primeras impresoras 3D
comerciales surgen en 1988 por la empresa estadounidense 3D Systems, que
desarrollo un método basado en la solidificación del material al exponerlo a la luz
ultravioleta.

A partir de ahí se han desarrollado otros métodos para crear impresoras comerciales
muy buenas pero con precios bastante elevados, prácticamente inaccesibles para la
mayoría de personas.
Después de varios años surgió el método de acumulación de
polímeros y basándose en este nace el proyecto REPRAP en el año
2005 de la mano del Dr. Adrian Bowye quien comenzó creando el
modelo Darwin, luego le siguió la Huxley y luego nacieron las Prusa
Mendel, que son las más construidas en la actualidad.
Impresora 3d modelo Darwin
Impresora 3d modelo Huxley

Este documento trata justamente sobre la construcción de una “Prusa Mendel
Iteration 2”, aunque a esta fecha ya existe una versión mejor, este modelo es el que
esta mas documentado y por lo tanto facilita mucho la construcción de la máquina a
continuación se describen los elementos más importantes.
Impresora 3d modelo “Prusa Mendel Iteration 2”
Hardware
Piezas imprimibles
Imagen cantidad Descripción
Chasis básico
4
Vértices con pie para chasis primario
2
Vértice para chasis primario
3
Soporte para interruptor que indica el origen
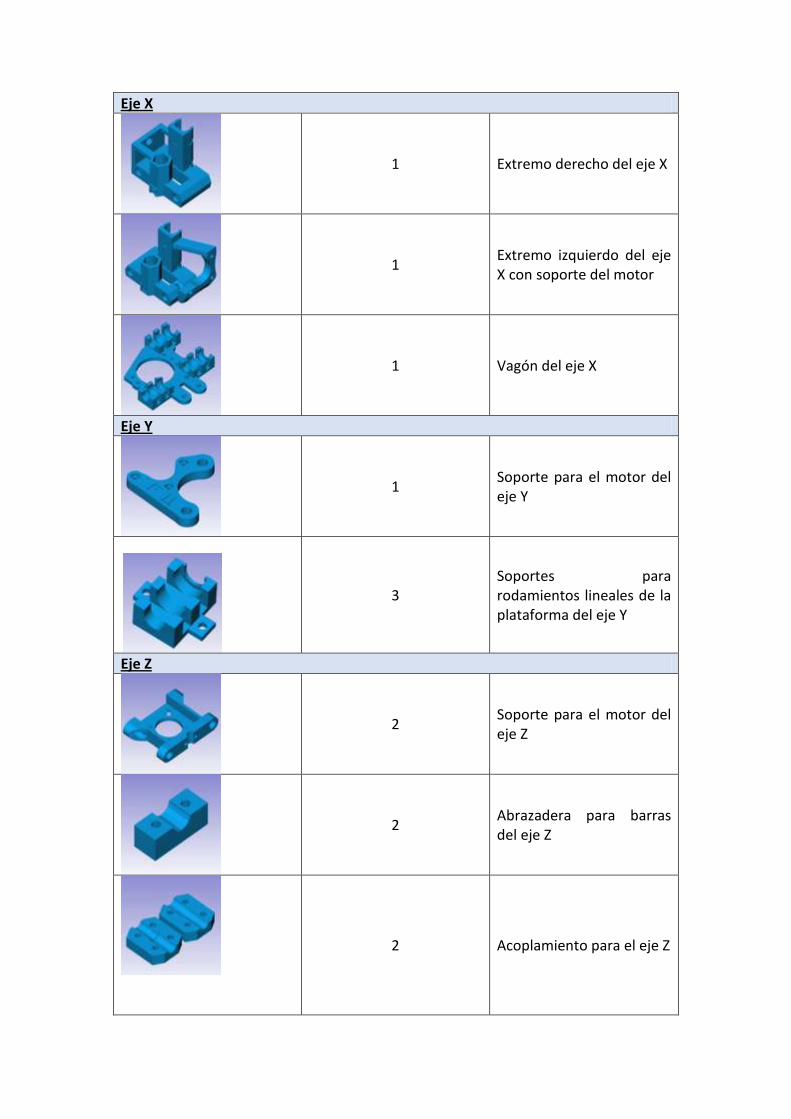
Eje X
1 Extremo derecho del eje X
1 Extremo izquierdo del eje X con soporte del motor
1 Vagón del eje X
Eje Y
1 Soporte para el motor del eje Y
3 Soportes para rodamientos lineales de la plataforma del eje Y
Eje Z
2 Soporte para el motor del eje Z
2 Abrazadera para barras del eje Z
2 Acoplamiento para el eje Z

Ejes Varios
8 Abrazadera de barra para el eje Z e Y
4 Abrazadera de correas para los ejes X e Y
2 porta tuercas para abrazadera de correas para los ejes X e Y
3 Guía de rodamiento para correas de los ejes X e Y
Extrusor
1 Piezas del cuerpo del extrusor
1 Engranaje grande
1 Engranaje pequeño
Todas estas piezas son impresas por una impresora 3D ya en funcionamiento, de aquí
viene que sean máquinas auto replicantes, ya que se puede replicar a si misma
fabricando piezas para otra impresora.
Esto supone un problema en un inicio ya que si no se dispone de una, cómo podemos
crearla, bueno al inicio de este proyecto se intento hacer las piezas de madera lo cual
es bastante bueno si se tienen las herramientas adecuadas, ya que todas las piezas
deben ser muy precisas con las medidas de modo que todo encaje bien al montarlo.

No siempre es posible crearse de este modo, por falta de la herramienta adecuada y el
tiempo necesario para conseguirlas, es por eso que al final se optó por comprar las
piezas plásticas a alguien que ya tiene una impresora de este tipo y se dedica a
comerciar kits para la construcción de impresoras REPRAP.
Luego de tener las piezas plásticas siguen las vitaminas, que no son nada más que
todas las piezas que no se pueden imprimir, como por ejemplo tornillos, tuercas,
barras de acero etc. a continuación un listado.
Piezas de ferretería (Vitaminas)
Imagen cantidad Descripción
Chasis básico
6
Varilla roscada 5/16” un metro de largo. Estas se cortaran al tamaño adecuado para armar el chasis
100
Tuercas 5/16 para fijar las varillas a las piezas plásticas
100
Arandelas 5/16 Se utiliza una por cada tuerca, además para calibrar la distancia de las barras del eje Z y el perno del extrusor
Eje Y
1
Base de madera 22x22cm 3-4 cm de espesor. Donde se colocan los rodamientos, y la base caliente.
1
Cristal o espejo de 20x20cm Se utiliza sobre la base caliente como base de impresión porque son muy planos
4
Sujeta papel, sirve para fijar el cristal a la base caliente
1
Cinta Kaptom adhesiva resistente al calor, se utiliza para poner sobre el cristal y que el plástico se adhiera mejor

Eje Z
2
Tubo de goma, de 5mm de diámetro interior y 2cm de largo Se colocan en los ejes de los motores del eje Z para que agarren mejor la varilla roscada que deberán mover
Ejes Varios + extrusor
5
Motores paso a paso Nema 17 1 para el eje X 1 para el eje Y 2 para el eje Z 1 para el extrusor
1
2 metros de correas T2.5 5mm de ancho. Longitudes: 920mm para el eje X 840mm para el eje Y
2
Poleas T2.5 metálicas o de SLS 1 para el motor del eje X 1 para el motor del eje Y
3
Varillas lisas M8 ( 8 mm de diámetro) de acero inoxidable de 1m de largo
10
Rodamientos Lineales LM8UU Se necesitan para los vagones que se deben deslizar en las varillas lisas. 3 para el eje X 3 para el eje Y 4 para el eje Z
6
Rodamientos 608 zz blindados 3 para el extrusor 1 para el eje X 2 para el eje Y
20
Bridas de 2.5mm de ancho y 120mm de largo para sujetar los rodamientos lineales en su lugar

20
Tornillos M3 x 10mm de largo 8 para los 2 motores del eje Z 3 para el motor del eje Y 3 para el motor del extrusor 6 para atornillar los soportes de los rodamientos lineales del eje Y a la base de madera
3
Tornillos M3 x 12mm de largo 3 para el motor del eje X
8
Tornillos M3 x 16mm de largo 4 para las abrazaderas de la correa del eje X. 4 para las abrazaderas de la correa del eje Y.
4
Tornillos M3 x 20mm de largo 2 para cada abrazadera de barra atornillada a los soportes de los motores del eje Z
8
Tornillos M3 x 25mm de largo 4 para cada uno de los 2 acoples del eje z
25
Tuercas M3 La mayoría van empotradas en las piezas imprimibles que llevaran tornillos M3
35
Arandelas M3 ancho normal Para cada tuerca M3 y otros usos como ajustes de posición de las piezas
3
Prisionero M3 cabeza Allen Para fijar las poleas a los motores de los ejes X, Y y el extrusor
Depende el tipo de extrusor que se vaya a usar
Tornillo M4 20mm de largo

Depende el tipo de extrusor que se vaya a usar
Arandela M4
Depende el tipo de extrusor que se vaya a usar
Tuerca hexagonal M4
Sobre motores paso a paso
Estos son motores especiales que nos permiten un gran control en cuanto al
movimiento que se realiza, en este caso se utilizan motores de 1.8º por paso esto
quiere decir que cuando se le indica mover un paso se mueve 1.8º esto nos da una
resolución de movimiento de 200 movimiento para completar una vuelta, sumado a
esto los controladores Pololus stepstick nos permiten realizar ½ paso, ¼ paso, 1/16
paso esto da una resolución total de 1200 movimientos para completar una vuelta, lo
que permite hacer movimientos de decimas de milímetro.
Existen dos modelos de motores paso a paso los unipolares que poseen cinco o seis
cables de control, y los usados aquí son los bipolares que solamente poseen cuatro
cables de control que funcionan de la siguiente manera:
PASO Bobina A Bobina B Bobina C Bobina D
1 ON OFF OFF OFF
2 OFF ON OFF OFF
3 OFF OFF ON OFF
4 OFF OFF OFF ON
Esta tabla muestra la combinación de pulsos que se le deben dar a cada cable de
control para posicionar el rotor en el ángulo deseado, las combinaciones se deben
realizar en este orden para que funcione correctamente, este ejemplo muestra un
motor paso a paso de 90º por paso es decir, completa la vuelta en 4 pasos, pero el de
1.8º por paso sigue el mismo principio de funcionamiento.

En cuanto a las vitaminas el mayor problema es la diferencia del sistema de medición
que se tiene, ya que todas las medidas vienen dadas en milímetros para todas las
piezas y en esta zona solo se encuentran en pulgadas, aunque se puede buscar
acercarse a las medidas originales, por ejemplo se sustituye las varillas roscadas de
8mm por las de 5/16” que son un poco más reducidas pero para formar el chasis esto
no tiene inconveniente, no es lo mismo cuando se busca el perno de tracción del
extrusor que debe ser exactamente de 8mm y además debe tener una sección
dentada.
Las piezas más difíciles de encontrar son las varillas lisas, los rodamientos lineales,
cinta Kapton y las correas dentadas con sus respectivas poleas, así como también los
motores que mueven toda la máquina. En este caso fue necesario comprar estas
piezas desde el exterior del país.
Aunque las varillas lisas se pueden encontrar en varios modelos de impresoras 2D, que
pueden ser una buena fuente de suministro no solo de las varillas sino también de
motores paso a paso que se encuentran en los modelos más antiguos y algunos
interruptores que se utilizan como sensores de los ejes.
Todas las otras piezas se pueden encontrar rebuscando un poco en las diferentes
ferreterías de la localidad.
Luego tenemos las piezas más importantes para que esta máquina realmente sea una
impresora 3D y no solo una estructura decorativa que para tal efecto no será muy
buena, se trata de la electrónica la cual se compone de una placa Arduino algunos
otros elementos necesarios para el funcionamiento de la Prusa.
Electrónica
Electrónica
Imagen cantidad Descripción
1
Arduino Mega 2560 Gracias a la tecnología de esta placa se controlan las funciones de la impresora mediante los comandos que le enviamos desde software en la computadora.
1
Placa RAMPS 1.4 Es como una placa de expansión que le da la capacidad de manejar voltajes y corrientes más altos a la placa Arduino.

5
Pololus stepstick Son circuitos especializados en el control de motores paso a paso, estos nos brindan más resolución de movimiento
1
base caliente Es una placa de 21x21 cm que tiene una circuito de pistas en toda su área funciona como una resistencia que se calienta al pasar la corriente a través de ellas, sirve para que el plástico extruido se fije bien a la base.
1
Extrusor Este elemento es el encargado de derretir el plástico que se introduce por uno de sus extremos y luego expulsarlo en hilos muy finos que irán conformando la pieza a imprimir.
1
Fuente de poder ATX Nos proporciona la corriente necesaria 20A a un voltaje de 12V para mover los motores, calentar el extrusor y la base caliente.
3
Pulsadores finales de carrera Indican el punto donde cada uno de los tres ejes llega al origen es decir coordenadas (0,0,0).
2
Termistores NTC Uno para el extrusor y otro para la base caliente Sirve para monitorear las temperaturas.

Estas son las piezas electrónicas necesarias que debemos obtener junto con las piezas
anteriormente listadas para poder comenzar a construir nuestra impresora 3D modelo
“Prusa Mendel Iteraion 2”.
Entre estas piezas las que fue necesario comprar en el exterior son placa Arduino,
placa RAMPS 1.4, controladores stepstick , base caliente, extrusor y termistores, a
pesar que la mayoría de estas piezas electrónicas son hardware libre y se tiene acceso
a los planos electrónicos de construcción, en ninguna tienda de electrónica de El
Salvador fue posible obtener los elementos necesarios para construirlos.
Los otros elementos si se pueden obtener en una tienda de electrónica común en este
país, en el caso de la fuente ATX se encuentra en una tienda de computadoras, ya que
esta es una parte fundamental de las mismas.
Software
En cuanto al software necesario para manejar la Prusa tenemos dos opciones las
cuales son Printrun también conocido como Pronterface este tiene la capacidad de
enviar los comandos G-codes que le indican a la máquina que es lo que debe hacer.
En la imagen anterior se puede apreciar el modelo que se va a imprimir en 2D, también
están los botones de control de los ejes y una consola para enviar comandos escritos,
muy útil cuando se está calibrando.
El otro programase llama Cura es un poco mas nuevo pero al igual que Printrun sirve
para controlar la máquina, entre las mejoras más notorias es que se muestra el modelo
a imprimir en 3D y se puede configurar fácilmente manipulando el objeto con el ratón.

En la imagen anterior se puede ver el mismo modelo cargado en Prinrun pero esta vez
en 3D.
Además del programa que envía las instrucciones también necesitamos uno que las
genere, es decir que tome nuestro modelo 3D y a partir de este genere una serie de
coordenadas que le indique a la máquina donde debe depositar plástico, estos son
llamados laminadores, el laminado consiste en:
1. Teniendo un modelo de un objeto 3D, para este caso usando SketchUp, luego
exportarlo a formato .STL
2. En su funcionamiento interno el programa de laminado corta el modelo en
capas y genera un recorrido de coordenadas de cada capa por ejemplo para el
modelo anterior generaría algo como esto para la capa correspondiente.

Los puntos rojos representan las coordenadas XY que indican el recorrido de la
línea de plástico que irá formando la figura y el número de capa representa la
coordenada del eje Z es decir la altura a la que irá poniendo el plástico, todo
esto se empaqueta en un archivo .gcode
Capa 1 Capa 8 Capa 15
Para esta tarea tenemos tres opciones:
Skeingforge
Slicer
Cura
Primero Skeinforge este puede adherirse al programa Printrun y funcionar en conjunto
es uno de los más complejos en cuanto a su configuración ya que posee muchas
opciones, que si bien esto permite un gran control de las piezas a crear también
confunde bastante a la hora de configurarlos, esto lo hace muy difícil de manejar,
además realiza un laminado bastante lento dando muchos problemas a la hora de
laminar modelos complejos.

En la imagen se puede observar una gran cantidad de botones de los cuales cada uno
posee muchos parámetros configurables.
Luego tenemos a Slicer que es un poco más cómodo en cuanto a su configuración,
pues no posee tantos parámetros como el anterior y además funciona de manera más
rápida generando laminados muy buenos, también puede adherirse a Printrun o
trabajar de manera independiente.

Y por ultimo tenemos a Cura es decir el mismo software mencionado con anterioridad
posee integrado un laminador pasado en Skeinforge pero mejorado en cuanto a su
interfaz y rapidez de laminado.
Por motivos de aprendizaje se está trabajando con todos estos programas aunque
hagan la misma función.

En cuanto al software del lado de la computadora estos son los más imprescindibles.
Pero cabe mencionar también algunos que sirven para crear los modelos 3D, estos son
SketchUp y OpenScad ambos se pueden utilizar de forma gratuita, pero Sketchup
necesita un pluging para poder generar el archivo .STL, OpenScad es un programa para
modelar de forma programada permite utilizar sentencias de bucle y variables para
generar los modelos.
Firmware
El Firmware es el programa que controla la máquina, es decir el que escucha las
instrucciones que el software de la computadora le envía y luego las ejecuta.
En cuanto a este elemento tenemos muchas opciones pero los más populares son
Sprinter y Marlin, están programados en el lenguaje que se utiliza para crear los
Firmwares de Arduino este es Processing, es un lenguaje con una sintaxis bastante
parecida al lenguaje C en la cual solo cambian las librerías que se utilizan.
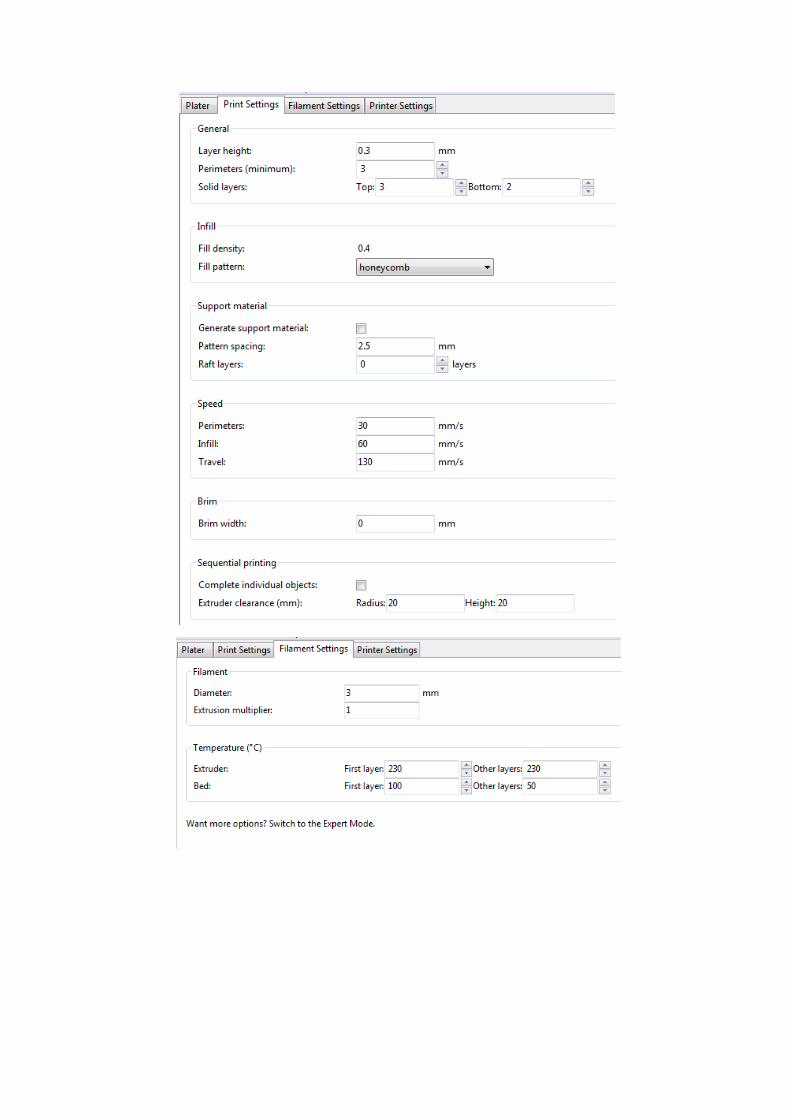
Ambos Firmware soportan una gran variedad de hardware es por esto que se deben
configurar ciertos parámetros para que se adapte al que se esté utilizando, esto se
hace a través de la modificación de ciertas líneas de código para indicar el tipo de placa
que se está usando en este caso es la RAMPS 1.4 (valor 33), también se indica el tipo
de termistores, los cuales son EPCOS 100K (valor 6), así como también las dimensiones
del área de impresión para este caso serán 190x190x100 milímetros.
Otros de los valores importantes de configurar son los de la variable STEPS_PER_UNIT
{80, 80, 2275.005, 460.12}, estos valores corresponden a los ejes X, Y, Z, extrusor y
indican cuantos pasos debe dar el motor paso a paso para que el eje en cuestión se
mueva una unidad, en este caso son milímetros.
Este valor es muy importante ya que de él depende que si le indicamos a la máquina
que se mueva 27mm realmente el eje se mueva esa distancia. Para calibrar este
parámetro se utiliza una simple regla de tres:
Nuevo valor N= (viejo valor N *valor indicado) / valor medido
Por ejemplo suponiendo que con el valor N de 460 y al indicarle al eje moverse 100mm
este solo se mueve 78mm debemos hacer el siguiente cálculo.
589.743= (460*100)/78
Esto significa que debemos sustituir el valor de 460 por el de 589.743 para que la
máquina cambie los pasos por unidad y se mueva la distancia correcta, normalmente
este procedimiento se debe realizar unas cuantas veces para cada eje y el extrusor.
En el caso del extrusor se debe medir la longitud del cable de plástico que se desplaza.

Construcción de la máquina
Es muy importante que al iniciar el proyecto de construir una impresora 3D se tenga
muy en claro que no todo sale bien al primer intento, realmente se debe tener mucho
entusiasmo, paciencia, perseverancia e ingenio, a pesar de las fallas se debe seguir
intentando hasta que se logre el objetivo.
NOTA IMPORTANTE: Antes que nada se debe tener claro que la electrónica es una de
las partes más delicadas de la impresora, se deben tomar todas las medidas
pertinentes para no dañar nada con la electricidad estática, evitar tocar demasiado los
circuitos, se recomienda utilizar pulsera antiestática especialmente al manipular los
pololu, no se debe conectar o desconectar nada de la placa mientras está este
alimentada, ya sea por la fuente de 12V o por la computadora, siempre debemos
desconectar de toda fuente de alimentación antes.
Se comienza comprobando la electrónica, si no se tiene mucha experiencia soldando
circuitos es recomendable comprar las placas ya ensambladas es un poco más caro
pero se evitan el costo de dañar alguna pieza importante, aunque bien se pueden
comprar kits y armarlo por sí mismo.
Primero se debe descargar el IDE de Arduino en un comprimido actualmente la versión
1.0.5, luego se descomprime y se conecta a la placa Arduino en la computadora
después se instala el controlador de la placa, para ello ir a administrador de
dispositivos, seleccionar el que aparece con símbolo amarillo, dar clic derecho y luego
en actualizar software de controlador seguido se elige buscar en el equipo, ahora hay

que navegar hacia donde se tiene la carpeta del IDE de Arduino entramos en ella y se
selecciona la carpeta drivers, después de instalar el controlador hay que ejecutar el IDE
de Arduino y se conecta con la placa en el menú herramientas se selecciona el puerto
serial al que está conectada la placa así como el tipo de tarjeta, en este caso es un
Arduino mega 2560.
A continuación se debe cargar a la placa un código de ejemplo en el menú
archivo>ejemplos>basics>blink, si todo ha ido bien el LED pin13 debe comenzar a
parpadear.
Luego ya podemos ensamblar la RAMPS con el ARDUINO y volvemos a probar el blink.
Ahora el LED de la RAMPS debe parpadear como lo hacía antes el LED del Arduino
Ahora hay que comenzar calibrando los pololus, para esto se debe utilizar un
amperímetro para medir la corriente que consume la placa, de esta manera se obtiene
un consumo de 100mA con solo la placa conectada y 350mA al tener un motor PAP
conectado al pololu esto significa que el motor está consumiendo 250mA, se
recomienda dejar el consumo de los motores a 200mA para el eje X e Y, de 400mA
para el eje Z y de 360mA para el extrusor, para regular el consumo se debe girar un
pequeño potenciómetro que estos tienen.

Una vez terminado este paso, seguimos con el montaje del eje X utilizando dos varillas
lisas tres rodamientos lineales y las piezas plásticas destinadas a esta parte de la
máquina, además ponemos el motor y la correa dentada listo para montar en resto de
la estructura.
Ahora montamos el chasis básico donde se monta todas las partes, en este mismo
paso instalamos el motor para el eje Y, y la barra inferior del eje Z.
Seguido a esto se instala la base para la base caliente

Continuando con la instalación de los motores del eje Z y la colocación del eje X en los
rieles del eje Z
El siguiente paso es poner la base caliente sobre la base de madera y el espejo sobre
esta, se coloca todo mediante unos resortes y unos pernos de 3mm, los resortes son
muy importantes ya que facilitan la nivelación de la base caliente al poder subir y bajar
según se gire el perno.
Ahora el último paso para tener la impresora lista para la primera impresión es colocar
el extrusor.

Esto es todo en cuanto al montaje del harware ahora solo queda unir la electrónica al
hardware para que esto tome vida, las conexiones se hacen de la siguiente forma
Estos es un resumen de pasos para la construcción de la “Prusa Mendel Iteration 2”,
para una información más detallada visitar la siguiente dirección:
http://www.iearobotics.com/wiki/index.php?title=Guia_de_montaje_de_la_Prusa_2

Las fotografías fueron tomadas de la dirección anterior.
Alternativas
Tal como se ha mencionado se tienen muchos modelos de impresoras 3d de open
hardware para construirse, he aquí las que más llaman la atención:
Prusa iteration 3
Este modelo es el sucesor de la impresora construida en esta ocasión, es mucho más
elegante, simple y se utilizan menos piezas tanto impresas como vitaminas, hasta
ahora todo lo dicho son ventajas y el lector podría preguntarse ¿Por qué no construir
una “Prusa Iteration 3” si es tan simple y fácil?, bueno la respuesta es que a pesar de
su simplicidad se cuenta con poca documentación que ayude a entender cómo
funcionan las impresoras 3D, y además se necesitan herramientas mucho más
complejas para crear las vitaminas, como es el caso de la plancha de aluminio que
forma la mayor parte del chasis de la máquina.
El objetivo de construir un modelo “Iteration 2” ha sido ganar experiencia, del proceso
de construcción para entender conceptos básicos de la impresión 3D a través de
tutoriales y la comunidad de constructores.
Es por esta razón por la que se recomienda construir el modelo prusa iteration 2 a las
personas que se están introduciendo al mundo de la impresión 3D.

Ahora que ya se tiene cierta experiencia, el siguiente paso es aventurarse a construir el
nuevo modelo, utilizando los conocimientos adquiridos con la construcción del
anterior, en este caso existen dos modelos uno con plancha de aluminio y otro con
caja de madera, que parece el más accesible dado que no poseemos un cortador láser.
Rostock
Al igual que con la “Prusa Iteration 3” esta impresora no está recomendada para iniciar
la construcción de una máquina de impresión 3D, ya que aun se encuentra en
desarrollo y se requieren conocimientos previos para no perderse al momento de su
construcción.
Aunque es muy interesante, llaman mucho la atención su extraña forma de moverse al
imprimir, ya que solo cuenta con tres ejes y todos son verticales, Su peculiar modo de
mover el hotend en el espacio la categoriza como DeltaBot, aunque sea una impresora
bastante alta su altura de impresión no resulta tan alta en comparación con las demás
REPRAP.

Materiales de impresión
En cuanto a la materia prima que se utiliza para construir las piezas existen muchas
opciones y aun más en desarrollo, por mencionar algunas tenemos: pulpa de madera,
cemento, pulpa de papel, nylon, sal y por último los más utilizados actualmente el
plástico PLA y ABS.
La presentación de los materiales de impresión se da en bobinas de cable que según
los extrusores más comunes en el mercado se tienen las medidas de 1.75mm de
diámetro o 3mm de diámetro.
Se recomienda utilizar el diámetro de 3mm, ya que el material es un poco quebradizo
en su estado de cable por lo tanto un diámetro demasiado pequeño resulta muy difícil
de manejar.
Los colores del material son muy variados y hay una opción para cada ocasión o según
sea el gusto de las personas.
PLA
Este es un plástico biodegradable hecho a base de maíz se derrite perfectamente
entre 180ºC a 190ºC es muy efectivo siempre y cuando la pieza terminada se
mantenga alejada del calor extremo.
ABS
El plástico ABS es un poco más difícil de derretir ya que lo hace entre los 225ºC a
235ºC, es un plástico muy resistente a los impactos fuertes, muy utilizado en la
industria automovilística.

Dificultades experimentadas durante la construcción
o Piezas de difícil acceso
Uno de los contratiempos más grandes que se tienen al principio es la dificultad para
adquirir todas las piezas que son necesarias para montar la máquina, ya sea por el
desconocimiento de los proveedores adecuados que proporcionen las piezas exactas
que se establecen en los tutoriales, o por que dichos proveedores no existen.
Son muchos materiales que no son comercializados en las ferreterías locales,
justamente porque nadie las ha necesitado antes y su demanda es nula.
Esta situación se irá solucionando mediante investiguemos alternativas que si hallan en
las tiendas a nuestro alrededor, siempre hay que estar perceptivo a materiales
sustitutos.
o Dificultad para construir el perno de tracción de plástico
Este perno es el encargado de empujar el plástico hacia el extrusor, como se puede ver
en la imagen posee un canal guía dentado por donde el plástico es aprisionado y al
girar el perno este es desplazado.
El precio del perno desde el exterior oscila en te $10 a $15 en la medida exacta, parece
un poco excesivo dado que un perno de dimensiones similares cuesta menos de $1 en
la ferretería local, esto hace que se trate de buscar una forma alternativa, es así como
se solucionó, creando los surcos a un perno normal para que estos hicieran el trabajo
de arrastrar el plástico.
o Piezas plásticas quebradas
Otro problema que surge es que algunas piezas plásticas que por accidente o mal
manejo durante el ensamblado se quiebran quedando inservibles, bueno este se
puede solucionar siempre y cuando las piezas sean de ABS, ya que el ABS se derrite
temporalmente al exponerlo al químico ACETONA (el que es comúnmente utilizado
por las mujeres para despintar esmalte de uñas) esto nos permite volver a unir las
piezas mientras están derretidas por el químico, esperar a que seque y vuelva a
solidificar, en muchos casos queda como nuevo.
En el caso que utilicemos plástico PLA u otro que no funcione como el ABS podemos
utilizar súper pegamento para el mismo efecto.
o Sistemas de medida diferentes con respecto a las instrucciones
Este problema genera un poco de confusión e inseguridad en cuanto a qué medidas se
pueden sustituir por otras y si esto afectara en el funcionamiento. Esto no se puede
solucionar más que experimentando, hay que probar todo lo que uno crea que puede
funcionar, en este caso se ensancho el diámetro del perno del extrusor con un poco de
cinta adhesiva, ya que el engranaje está hecho para un perno de 8mm de diámetro en
que se encuentra en el mercado es de 5/16” = 7.94mm, de esa manera se evita que
tambalee al girar.
Esto se supera completamente al poseer la impresora funcional ya que ahora se tiene
la capacidad de imprimir las piezas a medidas en pulgadas adaptándose totalmente al
sistema de medida regional.
o Dificultad de nivelación
Hay un poco de dificultad al nivelar la base caliente con el eje X, ya que si no está
nivelado correctamente el hotend podría expulsar plástico demasiado alto en unas
áreas y demasiado derretido en otras, esto se hace muy notorio en la primera capa de
las piezas. Para facilitar esta tarea se utiliza un nivel pequeño que se pone sobre la
base caliente con el espejo incluido y luego girando los pernos de cada esquina según
sea conveniente hasta conseguir una nivelación correcta.
NOTA: Es muy importante que toda la Máquina este sobre una superficie (mesa)
completamente nivelada, ya que esto afectaría al nivelar la base caliente.
Luego se debe nivelar el eje X con respecto a la base, eso significa que la altura del lado
derecho sea igual a la del lado izquierdo, esto lo podemos hacer con el mismo nivel en
la misma mesa nivelada, y girando cada motor del eje Z según sea necesario, también
podemos nivelar a ojo acercando la punta del hotend a la base caliente y moviendo
manualmente comprobando que está a la misma distancia durante todo el recorrido
del eje X e Y.

o Daños en el extrusor
Esto es debido a que la pieza plástica que compone el extrusor estaba construida de
plástico PLA que se funde a 180º aproximadamente, el calor que desprendía el hotend
durante la impresión de prueba calentó lo suficiente la pieza como para que esta se
deformara provocando una curvatura de la misma y su inutilidad.
Esto fue un grave daño ya que esta pieza es fundamental para empujar el plástico
hacia el hotend, la solución era imprimir un reemplazo de si misa antes que se dañara
por completo, para ello se desmonto el extrusor se enderezo la pieza curvada mientras
estaba caliente y luego se espero a enfriar, se recolocó todo en su lugar y se dispuso la
impresora a trabajar imprimiendo el reemplazo.
Constantemente acercaba un ventilador para enfriar la pieza dañada y evitar que se
vuelva a curvar pero eso fue inevitable.
Por suerte la pieza de remplazo se logro terminar y es completamente funcional, al ser
de plástico ABS es más resistente al calor y no presenta ningún inconveniente al
imprimir.
o Piezas que se despegan de la base caliente
Otro problema muy común es que las piezas que son demasiado grandes se despegan
en sus esquinas de la base caliente y esto hace que se doblen, para evitar esto se han
experimentado varios métodos dando como resultado tres que son muy eficaces.
1. Laca del cabello: este es un químico fijador para el cabello que crea una película
transparente al rociar el espray sobre la base caliente se crea una capa que
ayuda a la adherencia del plástico.
2. Otro método es el de diluir hilos de plástico ABS en acetona creando un liquido
poco espeso el cual esparciremos sobre la base caliente para mejorar la
adherencia, este método solo funciona con plástico ABS, puesto que el PLA se
funde completamente ante el acetona.
3. Se puede aplicar una película de pegamento de barra o un poco de cola blanca
diluida en agua sobre la base caliente, este método es el que parece ser más
fácil ya que esta clase de pegamento es muy común.
Cualquiera de estos métodos es efectivo, esto es necesario cuando las piezas a
imprimir son de gran tamaño, también es aconsejable tapizar la superficie del vidrio o
espejo con cinta adhesiva Kaptom que es resistente al calor y ayuda a una mejor
adhesión.

o Piezas con falta de plástico
Este problema se dio por una fuga de plástico en el extrusor, esto provoco que el
pastico que estaba destinado a la pieza no llegara a esta y quedara con falta notoria de
relleno de plástico.
Para solucionar esto se procedió a revisar el extrusor y se comprobó que había un
pequeño tornillo suelto que había sido sacado de su lugar por la presión del plástico, la
lesión es un poco extraña, para solucionarlo provisionalmente se recoloco el tornillo en
su lugar y se enrollo cinta Kapton alrededor presionando el tornillo en su lugar para
evitar que se salga de nuevo.
Esto ha solucionado el problema y se está a la espera de su comportamiento durante
las siguientes impresiones.
o Atasco del plástico al introducir un nuevo trozo
A menudo puede ocurrir que el trozo de cable de plástico dispuesto para cierta pieza
se termine, para evitar que la pieza quede a mitad se puede empujar un nuevo trozo
con la mano siguiendo el trozo que se está terminando, a menudo este proceso resulta
bien pero en algunas ocasiones puede resultar en atasco provocando así que la pieza
que se está imprimiendo pierda capas de plástico y sea imposible continuarla. Para
evitar esto es recomendable no cortar el cable de plástico en trozos pequeños si no
que conectar todo el carrete entero para que no haya necesidad de cambiarlo hasta
que se acabe por completo.

Fotografías de la máquina construida
Ventilación para la electrónica, las piezas de sujeción del ventilador se han impreso con
la misma impresora, esto es una muestra de que la máquina hace auto evolución.
La pieza que sujeta el ventilado se puede girar en el eje de la varilla roscada para dar
acceso a los conectores.
Extremos plásticos del eje X, en el extremo izquierdo en color negro se puede ver el
rodo o balero que sostiene la correa dentada, así como también los rodamientos
lineales puestos en la barra del eje Z. Por el lado derecho en rojo se puede ver el motor
en su posición así como los rodamientos lineales puestos sobre la barra del eje Z.

Motores de control para el eje Z se puede apreciar las abrazaderas que mantienen
unida la barra con rosca al eje de cada motor.
Diversos ángulos del cuerpo del extrusor, se puede apreciar los dos engranajes
helicoidales que ayudan a la tracción exacta y eliminación del error de movimiento al
cambiar la dirección del giro.

Además podemos ver que la pieza más grande que compone el extrusor se ha
reconstruido ya que la pieza anterior sufrió daño por el calor al estar hecha de PLA no
soporto el calor del extrusor.
Esta nueva pieza es de ABS que soporta muy bien el calor al que es expuesta, esto es
una prueba que la maquina es auto-reparable, hasta cierto punto.
Resortes que empujan el plástico hacia el perno dentado que lo empuja hacia el
hotend.
En la otra fotografía se ve el perno y el plástico pasando sobre él.
ANTES DESPUÉS
Aquí podemos apreciar el cambio de piezas de madera por las piezas de plástico.

ANTES DESPUÉS
Cambio de los acoples de madera apretados con bridas por los acoples de plástico
apretados con pernos para un agarre mucho mejor.
Clip sujeta papel utilizado para mantener el espejo en su lugar, también se puede
apreciar el resorte de nivelación de la base caliente.

Interruptor final de carrera, que le indica a la impresora cuando uno de los ejes ya
llego a su punto 0.
Placa ARDUINO MEGA 2560 + placa RAMPS 1.4 + Cable USB de conexión con la
computadora, un lado USB tipo B (ARDUINO) y el otro USB tipo A (COMPUTADORA)

Sistema de movimiento de los ejes, consiste en transformar el movimiento de torque
de los motores paso a paso a movimiento lineal mediante el uso de correas dentadas y
poleas dentadas.
Rodos o baleros utilizados en los extremos opuestos a los del motor en el eje X e Y
Pieza cuerpo del extrusor dañada por el calor, se deformo siendo inutilizable para su
propósito original.
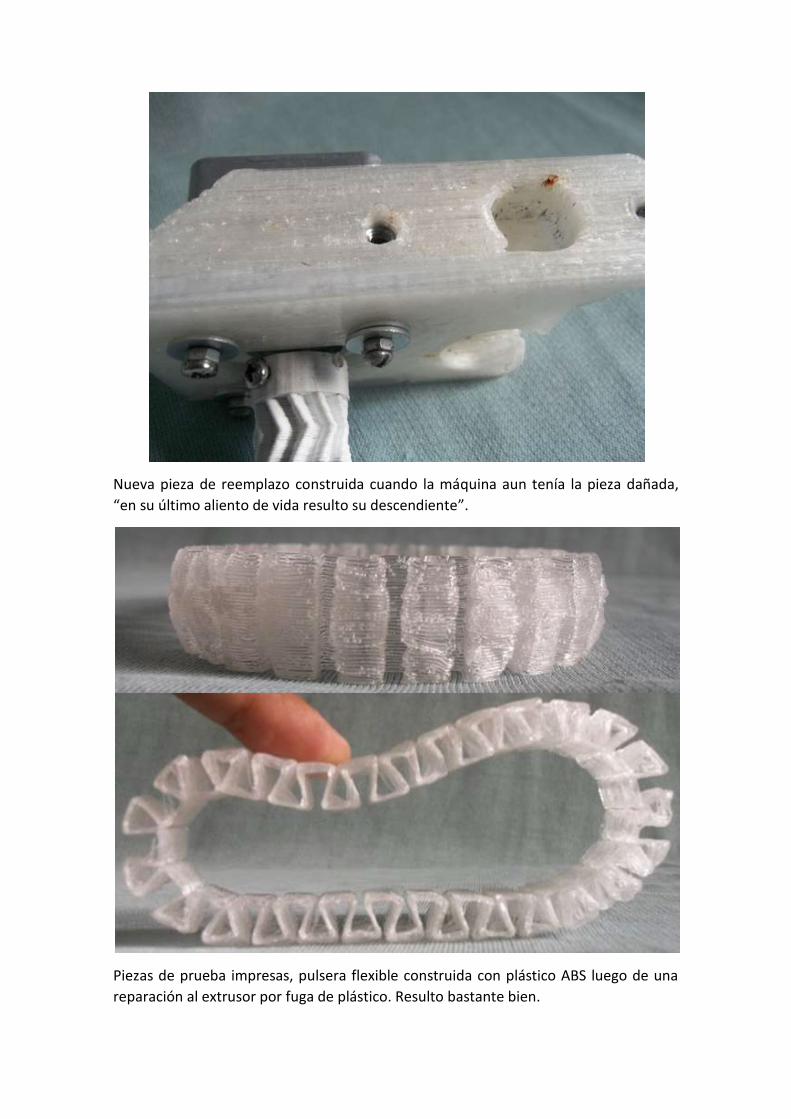
Nueva pieza de reemplazo construida cuando la máquina aun tenía la pieza dañada,
“en su último aliento de vida resulto su descendiente”.
Piezas de prueba impresas, pulsera flexible construida con plástico ABS luego de una
reparación al extrusor por fuga de plástico. Resulto bastante bien.

La misma pieza reducida 30% de su tamaño.
Pequeña casa de 1.6cm de ancho por 7.5 de largo y 5.5 de altura
Pequeñas manos para sujetar un teléfono celular en posición horizontal, pintada con
espray negro, se puede apreciar un poco que las líneas que forman las manos están un

poco separadas, esto es debido al extrusor dañado que presentaba una fuga de
plástico.
Aunque es para teléfonos diversos objetos se pueden colocar entre sus dedos plásticos
Fuente de poder ATX, de las utilizadas en la computadora, esta debe suministrar un
minino de 20ª para tener unos buenos resultados.
Se debe hacer este arreglo de conectar el cable verde (PS ON) con un cable negro
(Tierra) ya que esta fuente es para computadoras, las computadoras utilizan este
mecanismo para auto apagado. En nuestro caso queremos que siempre este
encendida.

Conector que va hacia la RAMPS para alimentar los motores, la base caliente y el
hotend.

Conclusión
Este tipo de tecnologías libres es algo nuevo que se está experimentando en el área del
hardware y se considera una de las mejores maneras de aprender, cuando una
persona es autodidacta no solo absorbe conocimiento si no que también lo crea, los
proyectos de hardware libre y en general cualquier clase de proyecto ya sea software o
hardware que este publicado bajo una licencia GNU es una gran oportunidad para
crear cosas asombrosas que son muy útiles a la humanidad.

Bibliografía
Historia de las impresoras 3D | Impresoras 3D . Equipo de impresoras3D.
Disponible en: < www.impresoras-3d.info/historia-de-las-impresoras-3d/ >.
Fecha de consulta 30 de mayo de 2013.
Clone wars: Prusa Iteración 2 - RepRap . Equipo de REPRAP. Disponible en:
<www.reprap.org/wiki/Clone_wars:_Prusa_Iteración_2 >. Fecha de consulta 30
de mayo de 2013.
Guia de montaje de la Prusa 2 - WikiRobotics - Iearobotics. Equipo de Clone
wars Disponible
en:<http://www.iearobotics.com/wiki/index.php?title=Guia_de_montaje_de_l
a_Prusa_2 >. Fecha de consulta 30 de mayo de 2013.





























