Embed Size (px)
Citation preview

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse
IMU & GPS Sensors Integrated to
Antenna Drive Control Loop
Dr. Ahmed Bassyouni
Consultant Engineer
Systems and Sensors
1

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse
Azimuth and Elevation Errors of Radar Antenna
Antenna’s Radar may suffer from poor accuracy in Azimuth and
Elevation angular motion due to External and Internal sources of
errors.
• External Error Sources
• Surface Deflections due to thermal effects and force of wind
• Disturbance of motion due to Gust and Wind
• Additional weights due to accumulated snow and dust
• Internal Error Sources
• Changes in the control loop parameters due to aging or misuse.
• Poor reliability due to undetected errors of HW and SW designs
or installation
2

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 3
These Sources are:
1. Forces OF WIND AND GHUST applied to the antenna
2. Fluctuating and systematic errors in the drive control
3. Environmental effects that may cause vibrations
4. Geometrical structure of the antenna, spacing of radiators,
5. Channels mismatch due to the errors of phase shifters output
Azimuth and Elevation Errors of Radar Antenna

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 4
We can model the beam Pointing Error as
δӨ = δӨΦ + δӨT + δӨa + δӨw
Where
δӨΦ pointing error due to phase shifters
δӨT Pointing error due to temperature effect
δӨa pointing error due to antenna structure
δӨw Pointing error due to forces of wind
Trades analysis and control techniques are developed
for these models
Today we focus only to model the wind effect
Azimuth and Elevation Errors of Radar Antenna

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 5
The force on the antenna due to wind with velocity V is given by
Where is the static air density, CD is Drag Coefficient and A is the projected
antenna area.
This equation is valid for both steady and time-varying wind gusts. The wind
velocity V is composed of a mean velocity Vm and a gust component Vg.
2
2
1AVCF DD
Modeling of Wind Applied to Antenna Surface
gm VVV

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 6
The projected area A is related to the array face area A0 by the azimuth
angle of the array relative to wind and the antenna tilt back angle by
)Tiltcos()AZcos(AA 0
Modeling of Wind Applied to Antenna Surface
The antenna deflection due to wind is proportional to force F, such that
we may write
2V)AZcos(K
The constant K depends on the antenna design and mechanical structure;
it is the transfer coefficient that relates the wind velocity to the deflection at
particular antenna azimuth angle .

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 7
For a rotating antenna with constant rotation rate Ω, we then have
2)t(VV)tcos(K)t( gm
Modeling of Wind Applied to Antenna Surface
where t is time and is shown explicitly to emphasize the time varying
nature of the deflection due to wind variability and antenna rotation.

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 8
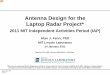
A proposed antenna controller consists of the estimator, the PI
controller, and the flexible mode controller.
The antenna state –space model(A,B,C) includes the disturbances v
and the measurement noise w
x Ax Bu v
y Cx w
The disturbances (predominantly wind gusts) have covariance V. The
measurement noise has covariance W. It is assumed additionally that the
input and output noises are not correlated. This assumption is equivalent
to independence of their sources. Indeed, the measurement noise is
independent of the wind disturbances.
Controller Model for Disturbed Antenna

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 9
The purpose of the estimator is to evaluate the antenna dynamic
states using the rate input, u, and the encoder output, y, of the
antenna. The estimated state vector is denoted , and the error
between the actual encoder output and the estimated output is
defined as
ˆ ˆy Cx y y
The estimated state is obtained from the following equation:
ˆ ˆex Ax Bu K
Controller Model for Disturbed Antenna

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 10
Antenna
Flexible mode Controller
Estimator
PI Controller
+
+
+
y
v w
r
_
+
eupI
u
++
ufu
++
x̂
Controller Modules
Controller Model for Disturbed Antenna

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse
Electronic sensors to determine forces acting on a body
* Accelerometers * Gyros (Angular Rate Sensors
Limitations that System Engineer has to overcome:
Inherent errors in position and velocity due to integration of sensor
error and sensor drift and Kalman Filter Latency
Uncertain dynamics may cause sudden errors that
decrease the Azimuth and Elevation accuracy
The System Engineer has to resolve the problem
applying advanced technology and creative ideas
11
Improve the Azimuth and Elevation Accuracy

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 12
GPS position and velocity are blended with the inertial data. Otherwise, if the GPS data is not available, the system will operate without any GPS aiding.
The inertial navigator computes position, velocity and orientation of the IMU.
The Kalman filter estimates the errors in the inertial navigator along with IMU, distance
Improve the Azimuth and Elevation Accuracy
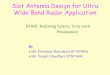
The IMU consists of three accelerometers and three gyroscopes (gyros) so that accelerations along specific axis and angular rotations can be measured. From the IMU angular rotations and acceleration along its axis are used to calculate roll, pitch and yaw angles.
The IMU feeds its data into KF

IMU
Angular RateAccelerationTime
GPS
PositionVelocityTime
PositionVelocityAccelerationAngular RateTime
Kalman Filter
High short term
P, V accuracy
High Long term
P,V accuracy
High long term and
short term accuracy
Advantage of Integrating IMU and GPS
Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 13
Improve the Azimuth and Elevation Accuracy

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 14
Standard Kalman Filter Loop
Improve the Azimuth and Elevation Accuracy
1k k k kx x v
k k k kz H x w
KF is built to estimate the
random process 1kx

Strap downINS
ProcessorIMU
Error ControllerAlgorithm
Kalman Filter Algorithm
GPS AzMeasure
GPSRx2
GPSRx1
Output
Position
Filter Correction Estimated Error
GPS Observables
Integrated IMU and GPS for Accurate Positioning
Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 15
Improve the Azimuth and Elevation Accuracy

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 16
Difference between the position form the IMU and GPS is processed
In KF (typically @ 10Hz) to estimate the slowly growing position error
In the IMU.
Since this error is a function of Azimuth error (as modeled in the
differential equations in KF) , observing the inertial position errors
means the orientation errors and IMU sensor errors can also be
estimated.
Improve the Azimuth and Elevation Accuracy
System Accuracy Process
sin .cos sin .sin
cos cosN E D AzimuthAz
, ,N E D Orientation errors w r to North, East, and Down axis
Azimuth Offset angle between IMU and GPS

AntennaSystem
AzimuthDrive
IMU&GPSIntegrated Algorithms
PositionController
External/Internal
Disturbance
Desired
Azimuth
Actual
Azimuth
IMU& GPS integrated to Antenna Position Control Loop
Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 17
Improve the Azimuth and Elevation Accuracy

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse
IMU Accuracy
Inertial error sources can be divided into stationary errors like the
random constant part of the gyro drift, and on-stationary errors like
the accelerometer scale factor.
Kalman Filter
The estimation accuracy depends on the a priori information of the
system and measurement models, as well as the noise statistics.
A well-designed Kalman filter will attenuate the initial state errors, and
smooth the effects of system and measurement errors through the
averaging process.
Factors Influence the Measurements Accuracy
18
Improve the Azimuth and Elevation Accuracy

The ACU has the following operational modes:
• Shutdown (no power to motors, brakes set)
• Standby (motor power on, brakes set)
• Velocity (rate loop driving of axes from local handset)
• Encoder (drive so encoders equal commanded position)
• Autonomous (drive so bore-sight equals commanded position)
• Preset (same as Autonomous with limited velocity and acceleration)
• Stow (drive to stow position).
To Achieve Reliable and Repeatable positioning data
Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 19

Dr. Ahmed Bassyouni IEEE Meeting-Syracuse 20
Questions ?
Thank You