Embed Size (px)
Citation preview

INFORMACIÓN DE USO DEL SPOT V1.0
V1.0 1
© Boston Dynamics 2020 Todos los derechos reservados v1.0 Julio 2020 Boston Dynamics 78 4th Ave. Waltham, MA 02451 USA (617) 868-5600 [email protected]
V1.0 2
CONTENIDO
1 INTRODUCCIÓN ..................................................................................................................................................................... 5
1.1 Información del fabricante .......................................................................................................................................... 5
1.2 Definición del propietario del Spot ......................................................................................................................... 5
1.3 Definición del operador del Spot ............................................................................................................................. 5
1.4 Descripción de la maquinaria .................................................................................................................................... 6
1.5 Especificaciones ................................................................................................................................................................ 7
2 RESUMEN DE SEGURIDAD DEL PRODUCTO ........................................................................................................ 8
2.1 Uso previsto ........................................................................................................................................................................ 10
2.2 Restricciones del entorno........................................................................................................................................... 10
2.2.1 Definición de entorno industrial .................................................................................................................... 10
2.2.2 Limitaciones en condiciones ambientales y tipos de aplicaciones ............................................. 11
2.2.3 Condiciones ambientales ................................................................................................................................... 13
2.3 Uso incorrecto ................................................................................................................................................................... 14
2.4 Equipo de protección personal (EPP) ................................................................................................................... 15
2.5 Consideraciones sobre la radiación no ionizante .......................................................................................... 15
2.5.1 Consideraciones sobre EMC .............................................................................................................................. 15
2.5.2 Consideraciones sobre la radio: ....................................................................................................................... 15
2.6 Láser ........................................................................................................................................................................................ 15
2.7 Ruido ....................................................................................................................................................................................... 16
3 TRANSPORTE, MANIPULACIÓN Y ALMACENAMIENTO .................................................................................. 17
3.1 Transporte ............................................................................................................................................................................ 17
3.2 Manipulación segura ..................................................................................................................................................... 18
3.2.1 Condiciones de seguridad para manipular el Spot ............................................................................. 18
3.2.2 Puntos de atrapamiento .................................................................................................................................... 18
3.2.3 Asideros ........................................................................................................................................................................ 19
3.2.4 Levantamiento adecuado entre dos personas ..................................................................................... 20
3.2.5 Equipo de protección personal (EPP) .......................................................................................................... 21

V1.0 3
3.3 Almacenamiento .............................................................................................................................................................. 21
3.3.1 Almacenamiento de baterías .......................................................................................................................... 22
4 Instalación y puesta en marcha .................................................................................................................................. 23
4.1 Antes de empezar ........................................................................................................................................................... 23
4.2 Preparación ........................................................................................................................................................................ 23
4.2.1 Montaje y preparación de cargas útiles .................................................................................................... 24
4.3 Instalación de la batería ............................................................................................................................................. 24
4.4 Entorno operativo para la carga de batería ..................................................................................................... 26
4.5 Encendido del robot ...................................................................................................................................................... 26
5 Uso de la máquina .............................................................................................................................................................. 27
5.1 Modos de uso .................................................................................................................................................................... 27
5.1.1 Desplazamiento en escaleras .......................................................................................................................... 27
5.2 Controles del Spot .......................................................................................................................................................... 29
5.3 Parada del robot ............................................................................................................................................................. 30
5.3.1 Parada manual........................................................................................................................................................ 30
5.3.2 Parada automática ................................................................................................................................................. 31
5.3.3 Riesgos potenciales al detener el Spot ....................................................................................................... 31
5.3.4 Estado desconectado ........................................................................................................................................... 32
5.3.5 Movimientos rápidos inesperados al detener o mantener el equilibrio ................................. 33
5.4 Puesta en marcha tras un paro inesperado .................................................................................................... 34
5.5 Apagado del Spot........................................................................................................................................................... 34
6 Mantenimiento ..................................................................................................................................................................... 36
6.1 Limpieza del ventilador del cuerpo del robot ................................................................................................. 36
6.1.1 Limpieza del robot ................................................................................................................................................. 36
6.2 Recalibración con SpotCheck .................................................................................................................................. 36
6.2.1 Cuándo ejecutar SpotCheck ............................................................................................................................ 37
7 Situaciones de emergencia ........................................................................................................................................... 38
7.1 Fuego ..................................................................................................................................................................................... 38
7.2 Daño causado por Spot a personas o instalaciones .................................................................................... 38
V1.0 4
8 Evaluación de riesgos ....................................................................................................................................................... 39
8.1 Evaluación de riesgos del fabricante .................................................................................................................. 40
8.1.1 Evaluación de riesgos de peligros mecánicos (impactos)............................................................... 41
8.1.2 Evaluación de riesgos de peligros mecánicos (puntos de atrapamiento) ............................. 41
8.2 Guía para la evaluación de riesgos de los propietarios ............................................................................. 42
8.2.1 Revisión de condiciones ambientales ....................................................................................................... 43
8.2.2 Evaluación de la gravedad de peligros mecánicos ............................................................................ 43
8.2.3 Evaluación de acontecimientos de peligros mecánicos ................................................................. 45
9 Declaración de cumplimiento..................................................................................................................................... 46
9.1 Declaración de conformidad de la UE ................................................................................................................ 46
9.2 Marcas .................................................................................................................................................................................. 47
V1.0 5
1 INTRODUCCIÓN
Este documento contiene información de seguridad fundamental.
El uso responsable del Spot es crucial para prevenir condiciones peligrosas para los operadores y
las personas cercanas. Asegúrese de leer, entender y cumplir con este documento para reducir
el riesgo de lesiones o daños al robot u otras propiedades.
Lea el documento completo antes de utilizar el Spot y guárdelo en una ubicación fácilmente
accesible para su posterior consulta.
1.1 Información del fabricante
Spot está fabricado por:
Boston Dynamics
78 4th. Street
Waltham, MA 02451
USA
1.2 Definición del propietario del Spot
En el marco del presente documento, un "propietario" es la entidad legal que compra o alquila
Spot con el propósito de operar el robot en aplicaciones y entornos industriales o comerciales.
Los propietarios están sujetos a las regulaciones de seguridad del lugar de trabajo y son
equivalentes activos del fabricante para implementar medidas de reducción de riesgos
residuales.
1.3 Definición del operador del Spot
En el marco del presente documento, un "operador" es cualquier persona que opera el Spot bajo
la responsabilidad del Propietario. Se asume que los operadores están formados en el uso del
Spot.
NOTA: tanto los Propietarios como los Operadores son referidos comúnmente como "usuarios".
V1.0 6
1.4 Descripción de la maquinaria
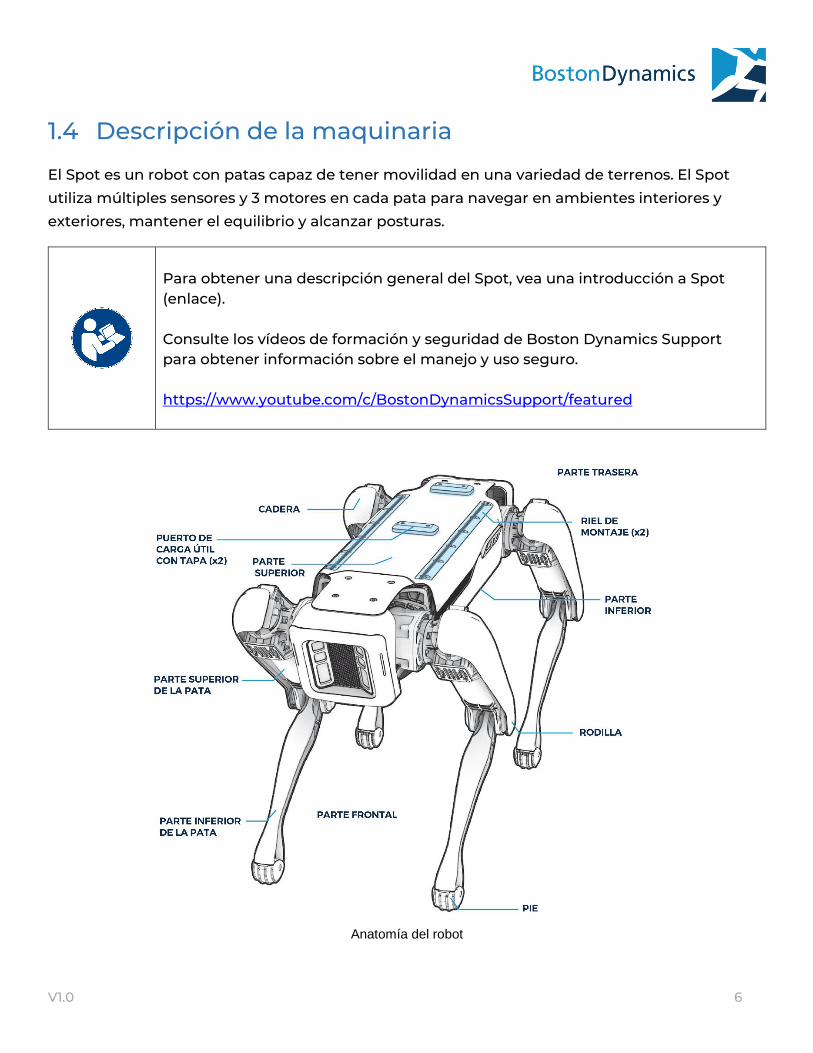
El Spot es un robot con patas capaz de tener movilidad en una variedad de terrenos. El Spot
utiliza múltiples sensores y 3 motores en cada pata para navegar en ambientes interiores y
exteriores, mantener el equilibrio y alcanzar posturas.
Para obtener una descripción general del Spot, vea una introducción a Spot (enlace). Consulte los vídeos de formación y seguridad de Boston Dynamics Support para obtener información sobre el manejo y uso seguro. https://www.youtube.com/c/BostonDynamicsSupport/featured
Anatomía del robot

V1.0 7
1.5 Especificaciones
Dimensiones base del robot
Largo: 1100 mm Ancho: 500 mm Altura (de pie): 840 mm Altura (sentado): 191 mm Peso neto: 32,5 kg
Batería
Capacidad de la batería: 605 Wh Tiempo de ejecución promedio (sin carga útil): 90 min Tiempo en espera: 180 min Tiempo de recarga: 120 min Peso: 4,2 kg
Cargador de batería
Tensión de entrada: 100-240 VCA 50/60Hz 5,5A Salida máxima: 35-58,6 VCC 7,2A máx. Temperatura de funcionamiento: de 0 a 40 °C
Conectividad
WiFi 2.4Ghz b/g/n Gigabit Ethernet
Detección de terreno
Campo de visión horizontal: 360° Rango: 4 m Iluminación: > 2 Lux Prevención de colisiones: mantiene una distancia establecida de los obstáculos fijos
Locomoción
Velocidad máx.: 1,6 m/s Desnivel máx.: ±30° Altura máxima de escalón: 300 mm
Cargas útiles
Las cargas útiles pueden montarse en el Spot utilizando los raíles y puertos de carga útiles respectivamente.
Entorno
Protección de ingreso = IP54 Temperatura de funcionamiento = de -20 a 45 °C Humedad de funcionamiento = de 0 a 70 % HR
V1.0 8
2 RESUMEN DE SEGURIDAD DEL PRODUCTO
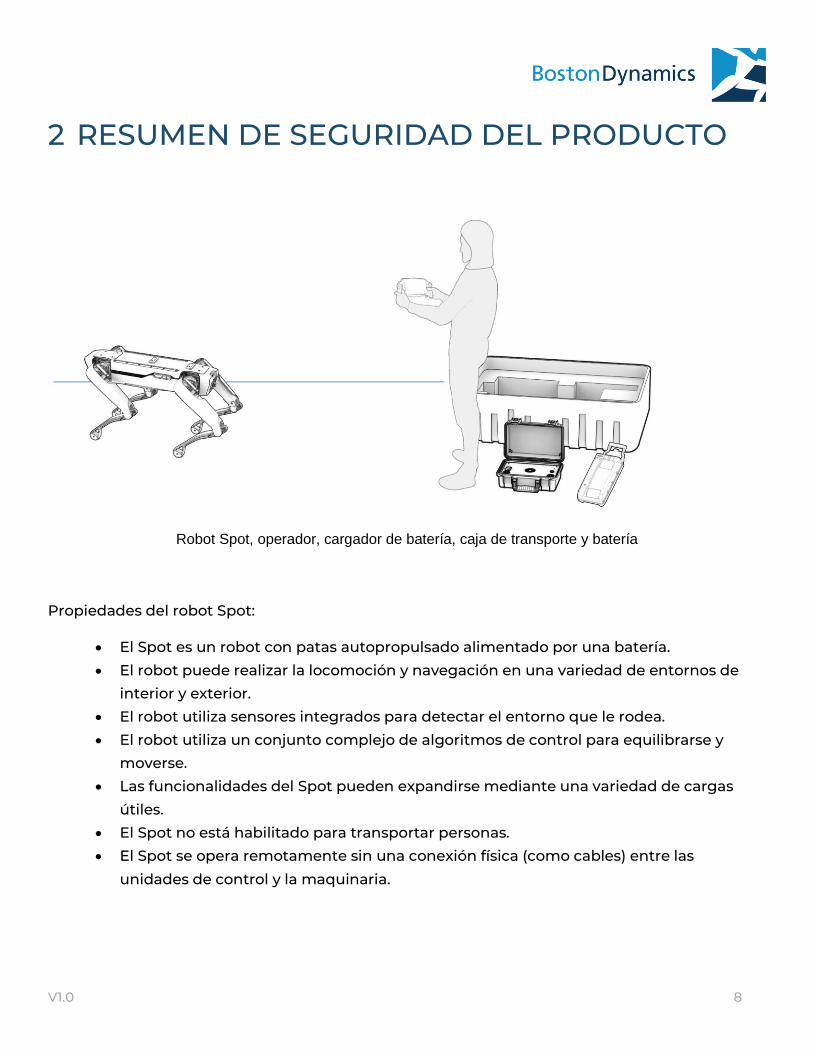
Robot Spot, operador, cargador de batería, caja de transporte y batería
Propiedades del robot Spot:
El Spot es un robot con patas autopropulsado alimentado por una batería.
El robot puede realizar la locomoción y navegación en una variedad de entornos de
interior y exterior.
El robot utiliza sensores integrados para detectar el entorno que le rodea.
El robot utiliza un conjunto complejo de algoritmos de control para equilibrarse y
moverse.
Las funcionalidades del Spot pueden expandirse mediante una variedad de cargas
útiles.
El Spot no está habilitado para transportar personas.
El Spot se opera remotamente sin una conexión física (como cables) entre las
unidades de control y la maquinaria.
V1.0 9
El Spot es un robot móvil con un alto grado de autonomía en la locomoción. El comportamiento del robot durante el movimiento puede variar o ser inesperado respecto a las trayectorias o los movimientos planeados.
Sea cauteloso en todo momento mientras opera el Spot. Revise la información de este documento minuciosamente y siga todas las recomendaciones.
El Spot es un robot cuadrúpedo con una metodología de control sofisticada. El Spot es un robot
con balance dinámico.
La postura erguida y/o balanceada solo puede obtenerse con el control activo.
No obstante, el control activo no garantiza la obtención de un balanceo estable.
La estabilidad está determinada por las condiciones del suelo y del entorno en cada momento. Dichas condiciones no son completamente previsibles y es posible que el Spot se caiga de manera inesperada.
Sea cauteloso en todo momento mientras opera el Spot. Revise la información de este documento minuciosamente y siga todas las recomendaciones.
El Spot es una máquina versátil y potente. Algunos riesgos (concretamente, los riesgos
mecánicos) dependen de las aplicaciones específicas y de la postura del robot en condiciones
peligrosas.
El Spot es un robot móvil autónomo para propósitos generales y por ello requiere que el Propietario realicen una evaluación de los riesgos de cada aplicación específica. Puede que sea necesaria protección adicional como resultado de la evaluación de riesgos específica para cada aplicación. El Propietario es responsable de implementar y mantener medidas adicionales de reducción de riesgos.
V1.0 10
Diseñar, instalar e integrar cargas útiles en el robot Spot puede influir en los riesgos y la
seguridad de la plataforma completa del robot. Debe tener en cuenta los requisitos reguladores
locales para la plataforma completa del robot al integrar cualquier carga útil en el Spot.
2.1 Uso previsto
El uso previsto y las condiciones ambientales son esenciales para evaluar los riesgos y los
requisitos de seguridad recogidos en este documento.
Las situaciones de uso típicas incluyen:
Movimiento en interiores a una velocidad nominal de 1,2 m/s en modo de supervisión
(el operador sigue al Spot en modo conducción directa) o en modo autónomo. La
locomoción incluye subir varios tramos de escaleras y otras superficies de paso
desniveladas. También son posibles pequeños obstáculos, pasajes estrechos (espacios
limitados) e infraestructuras abarrotadas.
Movimiento en exteriores a una velocidad nominal de 1,2 m/s en modo de supervisión
o modos autónomos (consulte más arriba) en terreno variable con formas o materiales
impredecibles y otras propiedades físicas. Los espacios son amplios y los operadores
deben observar atentamente el manejo la mayor parte del tiempo.
2.2 Restricciones del entorno
2.2.1 Definición de entorno industrial
En el ámbito de este documento, un “entorno industrial” es un lugar de trabajo que se considera
el sitio al que el público no puede acceder o no se espera razonablemente que esté presente
durante las tareas previstas y la aplicación del robot.
Los entornos industriales están estructurados o semiestructurados. La disposición,
infraestructura y hardware dentro del entorno tienen un propósito designado.
En concreto, se aplican las siguientes condiciones a las aplicaciones de Spot:
El área de trabajo del Spot debe delimitarse y todos los operadores y personas
expuestas al robot deben estar al corriente de esta área antes de su uso.

V1.0 11
Se espera que el personal de manejo y observación se ajuste a las directrices de
seguridad del empleador para el uso de EPP.
El acceso al entorno industrial está restringido a trabajadores adultos que hayan sido
informados del contenido de este documento.
Los espacios públicos están excluidos de las definiciones y condiciones mencionadas
más arriba.
El personal sin formación y los niños están excluidos de las definiciones y condiciones
mencionadas más arriba.
Los laboratorios de investigación o las instalaciones temporales son aptas para el uso
siempre que se apliquen todas las condiciones y restricciones.
Se excluyen las aplicaciones destinadas a la exposición frecuente al robot por los
usuarios o que puedan requerir interacción física con el robot.
Incumplir las condiciones mencionadas arriba sobre el tipo de entorno, personal y condiciones de exposición a peligros puede exponer a los usuarios a riesgos mayores a aquellos estimados para su uso previsto.
2.2.2 Limitaciones en condiciones ambientales y tipos de aplicaciones
Spot es un robot con patas. Su locomoción y equilibrio están basados en un principio de control
dinámico. Los sensores se utilizan para la percepción del suelo y del entorno que le rodea.
Las condiciones del entorno influyen significativamente en la estabilidad del robot y la tasa de
fracaso durante la locomoción.
Las condiciones peligrosas durante la locomoción pueden resultar en los comportamientos siguientes:
● Caídas ● Inestabilidad e intentos de recuperación que causan
movimientos impredecibles de las patas ● Grandes desviaciones de las rutas previstas y
planeadas ● Aceleraciones repentinas de cualquiera de las patas
o del robot completo ● Vuelcos ● Deslizamientos o vueltas tras caídas y vuelcos ● Cualquier combinación de las mencionadas arriba

V1.0 12
V1.0 13
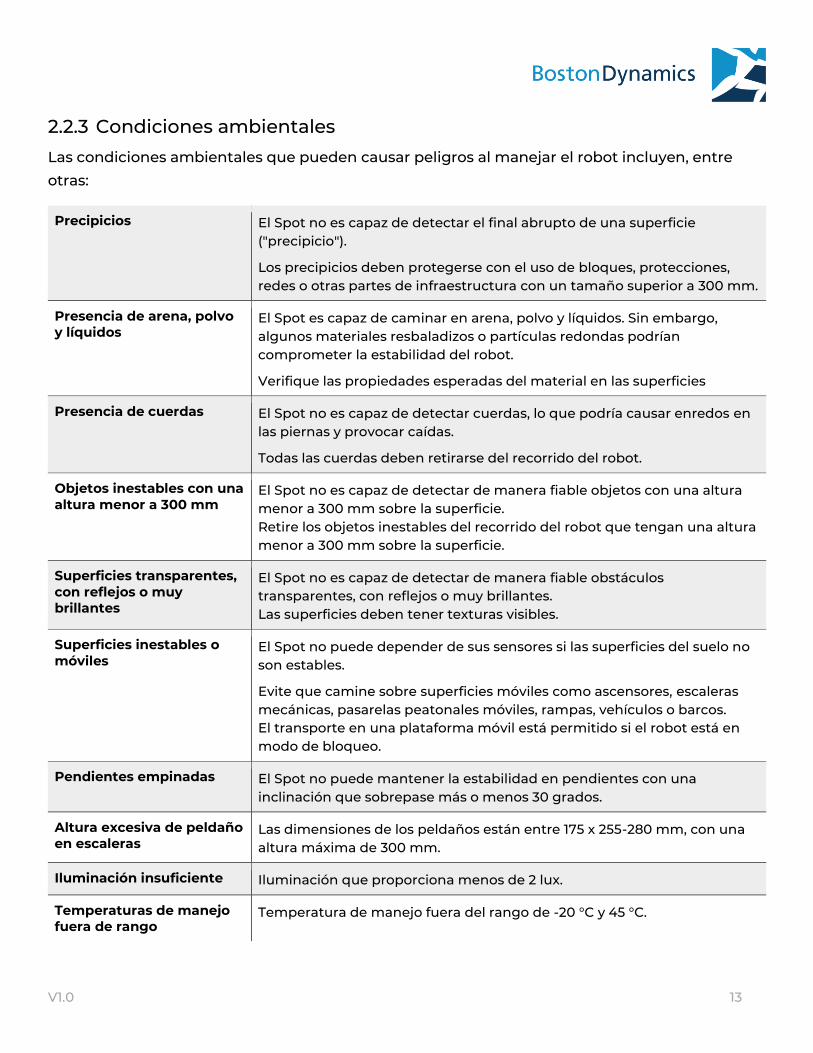
2.2.3 Condiciones ambientales
Las condiciones ambientales que pueden causar peligros al manejar el robot incluyen, entre
otras:
Precipicios El Spot no es capaz de detectar el final abrupto de una superficie ("precipicio").
Los precipicios deben protegerse con el uso de bloques, protecciones, redes o otras partes de infraestructura con un tamaño superior a 300 mm.
Presencia de arena, polvo y líquidos
El Spot es capaz de caminar en arena, polvo y líquidos. Sin embargo, algunos materiales resbaladizos o partículas redondas podrían comprometer la estabilidad del robot.
Verifique las propiedades esperadas del material en las superficies
Presencia de cuerdas El Spot no es capaz de detectar cuerdas, lo que podría causar enredos en las piernas y provocar caídas.
Todas las cuerdas deben retirarse del recorrido del robot.
Objetos inestables con una altura menor a 300 mm
El Spot no es capaz de detectar de manera fiable objetos con una altura menor a 300 mm sobre la superficie. Retire los objetos inestables del recorrido del robot que tengan una altura menor a 300 mm sobre la superficie.
Superficies transparentes, con reflejos o muy brillantes
El Spot no es capaz de detectar de manera fiable obstáculos transparentes, con reflejos o muy brillantes. Las superficies deben tener texturas visibles.
Superficies inestables o móviles
El Spot no puede depender de sus sensores si las superficies del suelo no son estables.
Evite que camine sobre superficies móviles como ascensores, escaleras mecánicas, pasarelas peatonales móviles, rampas, vehículos o barcos. El transporte en una plataforma móvil está permitido si el robot está en modo de bloqueo.
Pendientes empinadas El Spot no puede mantener la estabilidad en pendientes con una inclinación que sobrepase más o menos 30 grados.
Altura excesiva de peldaño en escaleras
Las dimensiones de los peldaños están entre 175 x 255-280 mm, con una altura máxima de 300 mm.
Iluminación insuficiente Iluminación que proporciona menos de 2 lux.
Temperaturas de manejo fuera de rango
Temperatura de manejo fuera del rango de -20 °C y 45 °C.
V1.0 14
Conexión inalámbrica débil
El Spot entrará en el modo de parada de protección cuando pierda la conexión inalámbrica con el mando. Si sucede en escaleras, pendientes o otras superficies desniveladas, puede que el Spot se deslice o caiga al intentar sentarse.
2.3 Uso incorrecto
Boston Dynamics onsidera las siguientes motivaciones para los malos usos previsibles:
Comportamiento de una persona como resultado de la falta de concentración, descuido o
falta de capacitación.
Comportamiento reflejo de una persona en caso de fallo de funcionamiento, incidente o
fallo durante el uso de la máquina.
Operar el robot sin conocimiento suficiente de aplicaciones y entornos específicos.
Los comportamientos que no se correlacionan con ninguna necesidad operativa para lograr un
objetivo de misión/producción no se consideran previsibles.
Los comportamientos que se consideran usos indebidos previsibles incluyen, entre otros:
Acercarse y/o permanecer cerca del Spot durante la operación para observar al robot.
Intentar acceder a juntas móviles u otros componentes del robot durante las operaciones
activas del Spot
Intentar hacer contacto con el robot durante el inicio de la inestabilidad para modificar el
curso de los eventos.
Una persona juzga mal su posición con respecto al robot cuando el robot se mueve en un
terreno más alto
No manejar el Spot de acuerdo con las especificaciones ambientales se considera un uso
incorrecto.
Otros usos incorrectos incluyen, entre otros:
Transporte de personas o animales
Transporte de materiales y sustancias peligrosos
Daño intencional a otra persona
Uso para cualquier propósito ilegal
Uso como peldaño
Uso en entornos potencialmente explosivos
V1.0 15
Cualquier mal uso del robot puede causar lesiones personales
graves o provocar riesgos materiales importantes.
2.4 Equipo de protección personal (EPP)
No se requiere EPP adicional al manejar Spot más allá del requerido en los entornos industriales
del propietario. Sin embargo, es recomendable usar calzado de seguridad.
2.5 Consideraciones sobre la radiación no ionizante
A continuación se proporciona información sobre la radiación no ionizante.
2.5.1 Consideraciones sobre EMC
El Spot ha sido probado para el cumplimiento de EMC de acuerdo con los estándares de los
entornos de la industria pesada. El Spot debería ser capaz de soportar los disturbios de EMC
típicos de los entornos industriales.
Consulte la sección Declaración de cumplimiento para obtener más información.
2.5.2 Consideraciones sobre la radio:
El Spot utiliza una radio Wi-Fi aprobada por la Radio Equipment Directive (RED).
Adicionalmente, el Spot ha sido evaluado de acuerdo con los estándares apropiados de RED
para los dispositivos de radio.
Consulte la sección Declaración de cumplimiento para obtener más información.
2.6 Láser
El robot Spot contiene 5 sistemas de cámara estéreo que incluyen un sistema de proyección de
láser de Clase I.
V1.0 16
Este producto está clasificado como Class 1 Laser Product bajo el estándar UNE/EN 60825-1, Edición 2 (2007) y Edición 3 (2014).
Alterar o ajustar cualquiera de los componentes láser no está permitido y podría resultar en exposición peligrosa a la radiación. El uso de controles, ajustes o procedimientos de rendimiento diferentes a aquellos especificados aquí pueden resultar en exposición peligrosa a la radiación.
2.7 Ruido
El ruido aéreo generado por el Spot está determinado por el entorno en el que opera el Spot.
El ruido de Spot al caminar sobre un suelo de alfombra acolchado será mucho menor que el
ruido de Spot al subir escaleras de metal. Antes de poner a Spot en uso regular, los usuarios
deben trabajar con su personal de EH&S para determinar si se requiere PPE adicional debido al
ruido generado por el Spot en su entorno de trabajo.

V1.0 17
3 TRANSPORTE, MANIPULACIÓN Y ALMACENAMIENTO
3.1 Transporte
El Spot se transporta en dos cajas personalizadas diseñadas exclusivamente para el robot y sus
componentes asociados.
No tire las cajas tras extraer el robot Spot. Las cajas están diseñadas para transportar el robot y sus accesorios, y para devolverlos a Boston Dynamics para servicios.
Caja de transporte
Largo: 927 mm Ancho: 546 mm Altura: 464 mm Contenedor vacío: 47,6 kg Peso combinado: 80,1 kg
Caja de transporte para batería/fuente de alimentación
Largo: 559 mm Ancho: 432 mm Altura: 267 mm Contenedor vacío: 9,2 kg Peso combinado (una batería): 18,1 kg Peso combinado (dos baterías): 22,7 kg
V1.0 18
3.2 Manipulación segura
Las instrucciones operativas y de seguridad sobre el manejo del Spot se recopilan en una serie
de vídeos de formación.
Vídeo: Spot Safety: Safe Handling En este vídeo, preste mucha atención a los elementos siguientes:
● Condiciones seguras para el manejo (verifique que la alimentación esté apagada)
● Puntos de pellizco (ubíquelos en cada pata y tenga cuidado con los pellizcos)
● Asas (ubíquelas y cómo levantar el robot)
● Elevación adecuada para dos personas (procedimiento ilustrado)
3.2.1 Condiciones de seguridad para manipular el Spot
Existen dos condiciones de seguridad para la manipulación segura del robot:
Power OFF (Apagado)
Power ON (Encendido), motor lockout
Consulte la sección Parada del robot para obtener información sobre el apagado seguro del
robot.
Manipule el Spot únicamente cuando los motores están cerrados o el robot está apagado.
3.2.2 Puntos de atrapamiento
Las articulaciones del Spot pueden pellizcar los dedos y otras partes del cuerpo y enredarse en
ropa suelta, cabello largo o joyería.
V1.0 19
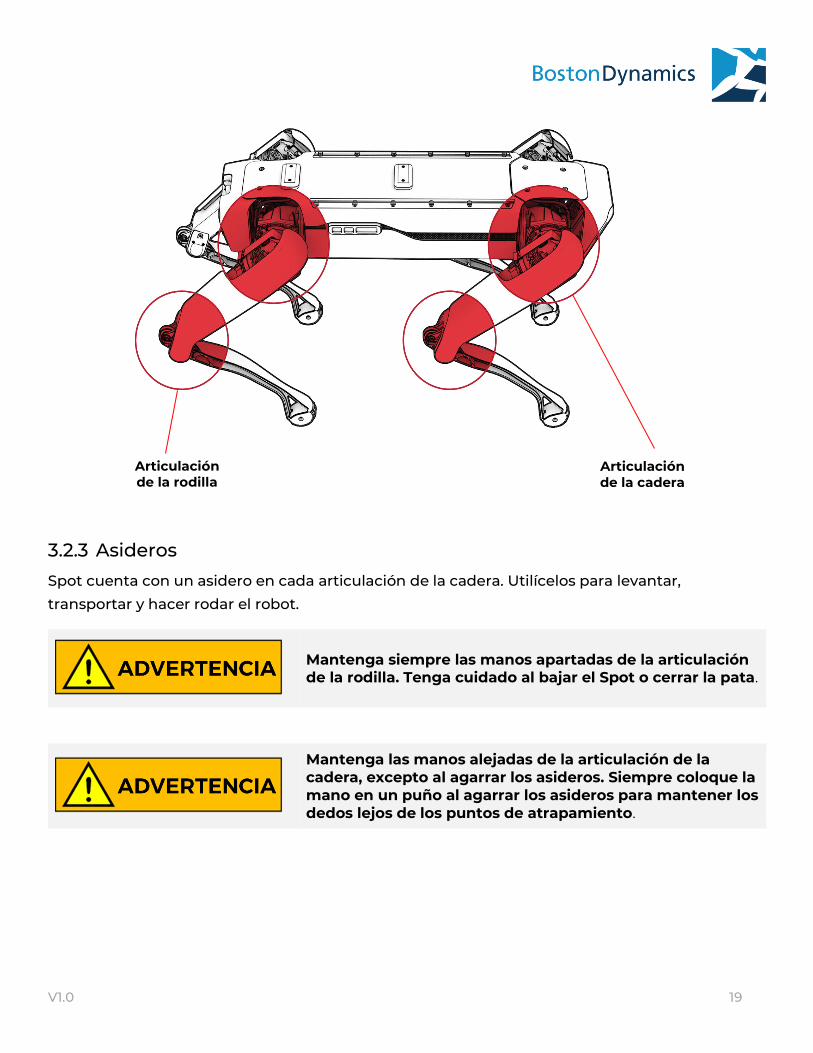
3.2.3 Asideros
Spot cuenta con un asidero en cada articulación de la cadera. Utilícelos para levantar,
transportar y hacer rodar el robot.
Mantenga siempre las manos apartadas de la articulación de la rodilla. Tenga cuidado al bajar el Spot o cerrar la pata.
Mantenga las manos alejadas de la articulación de la cadera, excepto al agarrar los asideros. Siempre coloque la mano en un puño al agarrar los asideros para mantener los dedos lejos de los puntos de atrapamiento.
Articulación de la cadera
Articulación de la rodilla

V1.0 20
Al utilizar los asideros, podría pellizcarse las manos y los
dedos.
Siempre coloque ambas manos en un puño. No extienda los dedos para evitar pellizcarse.
Para evitar los puntos de atrapamiento, nunca transporte el Spot con los dedos extendidos.
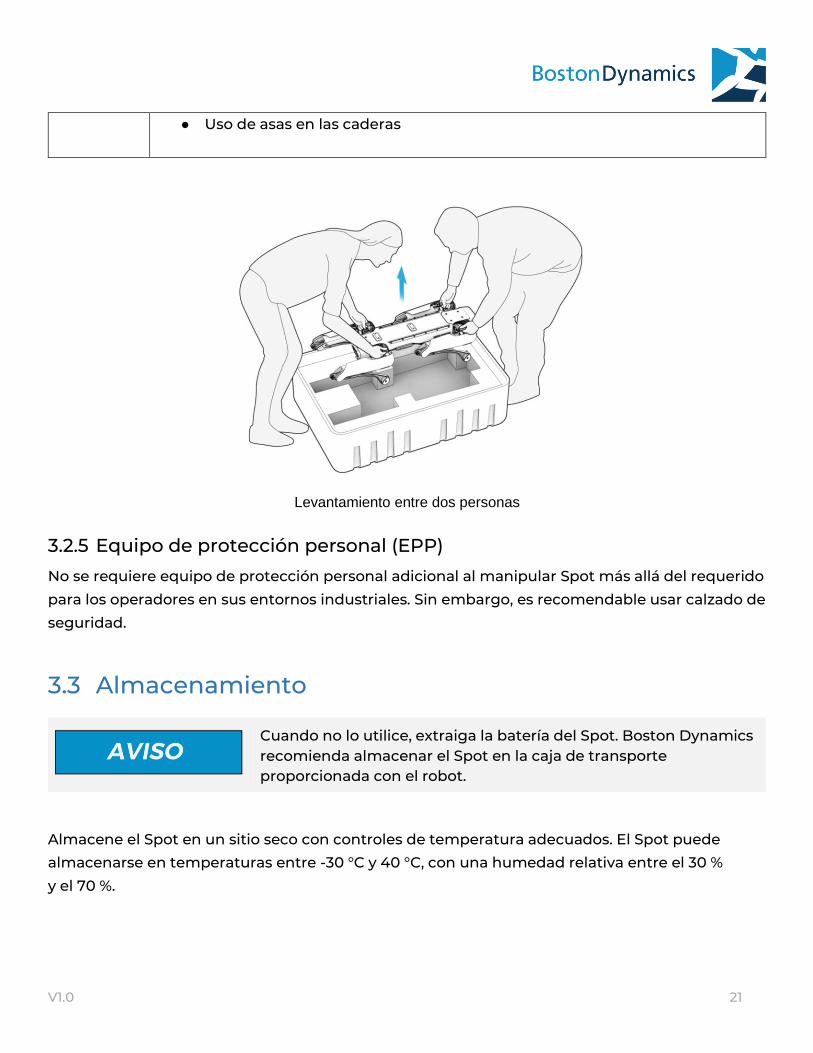
3.2.4 Levantamiento adecuado entre dos personas
El Spot es pesado (32 kg) y puede ser difícil de transportar, especialmente con cargas fijas
acopladas. Agarre los asideros y mantenga siempre las precauciones de levantamiento seguro.
Siempre levante el Spot entre dos personas, una en el frente y otra en la parte trasera.
Vídeo: Spot Operation: Spot Startup En este vídeo, preste mucha atención a los elementos siguientes:
● Cómo levantar el Spot entre dos personas
● Puntos de agarre más seguros para patas sueltas (segmento final)
V1.0 21
● Uso de asas en las caderas
Levantamiento entre dos personas
3.2.5 Equipo de protección personal (EPP)
No se requiere equipo de protección personal adicional al manipular Spot más allá del requerido
para los operadores en sus entornos industriales. Sin embargo, es recomendable usar calzado de
seguridad.
3.3 Almacenamiento
Cuando no lo utilice, extraiga la batería del Spot. Boston Dynamics recomienda almacenar el Spot en la caja de transporte proporcionada con el robot.
Almacene el Spot en un sitio seco con controles de temperatura adecuados. El Spot puede
almacenarse en temperaturas entre -30 °C y 40 °C, con una humedad relativa entre el 30 %
y el 70 %.
V1.0 22
3.3.1 Almacenamiento de baterías
Vídeo: Spot Safety: Battery and Charging. En este vídeo, preste mucha atención a los elementos siguientes:
● Cómo quitar y revisar las baterías inspeccionando cuidadosamente la ranura de la batería
● Cómo manejar la batería
Almacénelas a temperaturas entre -30 y 25 °C. Cárguelas a temperaturas entre 0 y
40 °C. Opérelas a temperaturas entre -20 y 45 °C.
Los operadores del Spot deben desarrollar una política de seguridad de carga y
almacenamiento de la batería que sea consistente con los estándares de la industria y
las regulaciones locales.
Extraiga la batería del robot durante el transporte o el almacenamiento.
V1.0 23
4 Instalación y puesta en marcha
Debido a que el Spot es un robot móvil, no requiere ningún hardware estructural especial o
accesorios de instalación como mecanismos especiales de anclaje, almohadillas antivibración,
etc.
4.1 Antes de empezar
Es responsabilidad del Propietario garantizar que los operadores, observadores y personas
expuestas estén formadas en el comportamiento seguro en presencia del Spot y que el manejo
del Spot no pone a nadie en riesgo.
Consulte Definición del propietario del Spot para obtener información acerca de los usuarios y
su responsabilidad.
Todo el personal expuesto al Spot, ya sea de forma activa
utilizando el robot o de forma pasiva como simple
observador, están sujetos a riesgos.
Asegúrese de que todas las personas están formadas correctamente e informadas sobre las instrucciones en
este documento.
El Spot no está previsto para ser usado en tareas que requieran su manejo en proximidad
cercana a otras personas.
4.2 Preparación
Las instrucciones generales sobre la configuración del Spot se ilustran en una serie de vídeos de
capacitación.
Vídeo: Safety distances from Spot Vídeo: Spot set up and safe handling
V1.0 24
Antes de poner en marcha el Spot, asegúrese de tener espacio suficiente alrededor del robot para manejarlo de forma segura.
Compruebe que hay una distancia de separación de al
menos 2 metros antes de usar el Spot.
4.2.1 Montaje y preparación de cargas útiles
La integración de cargas útiles en la plataforma del Spot puede afectar a la estabilidad del robot.
Las cargas útiles deben validarse y probarse antes de su uso.
Consulte el documento Spot Payload Hardware Reference para obtener más información.
4.3 Instalación de la batería
El Spot está propulsado por una batería extraíble de ion litio. La batería puede cargarse de forma
independiente o desde dentro del robot.
Utilice únicamente la batería del Spot proporcionada por Boston Dynamics.
● No cortocircuite, queme, desmonte, sumerja, perfore, aplaste, deje caer o dañe la batería.
● Si la batería empieza a arder, no intente apagar el fuego. Evacue a una zona segura y llame al departamento de bomberos. Los incendios de las baterías generan humos tóxicos y no pueden extinguirse con extintores convencionales o agua.
V1.0 25
Cargue la batería únicamente con el cargador proporcionado por Boston Dynamics.
Para reducir el riesgo de descarga eléctrica y fuego: ● Utilice un enchufe con una conexión a tierra
apropiada. No utilice adaptadores de enchufe. ● No toque las partes no aisladas del conector de salida
o los terminales de la batería. ● No abra o desmonte el cargador. ● No utilice el cable del enchufe CA si está dañado.
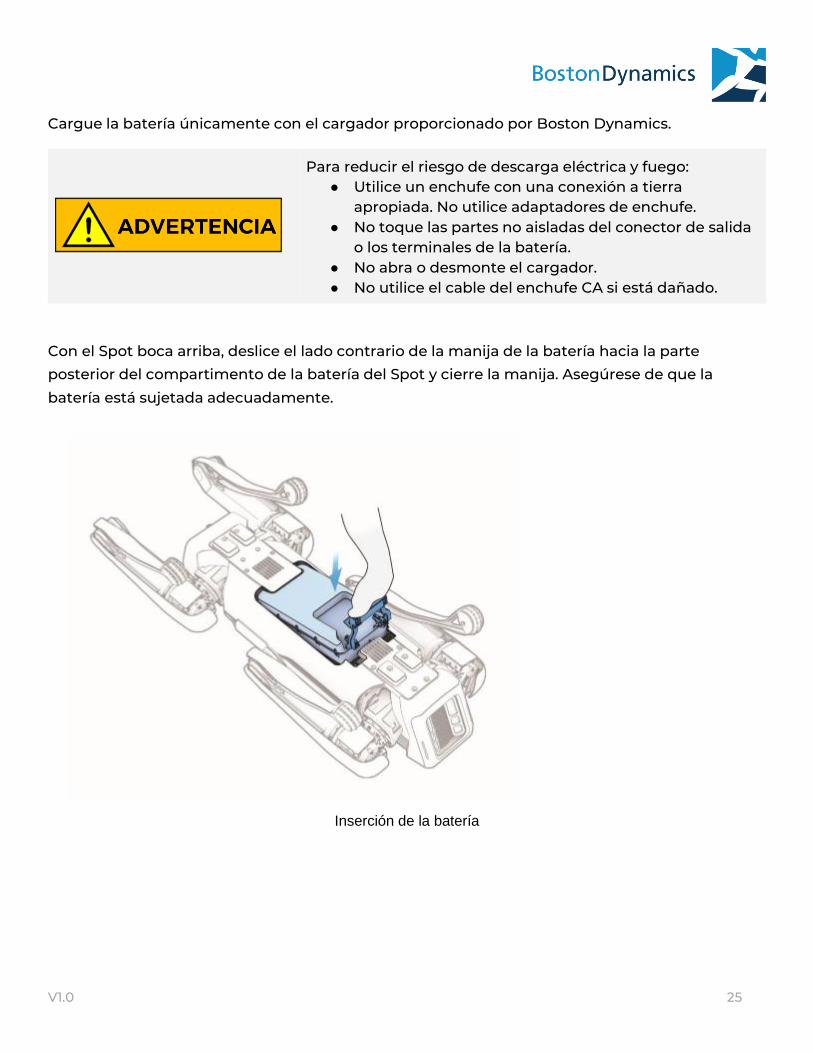
Con el Spot boca arriba, deslice el lado contrario de la manija de la batería hacia la parte
posterior del compartimento de la batería del Spot y cierre la manija. Asegúrese de que la
batería está sujetada adecuadamente.
Inserción de la batería

V1.0 26
4.4 Entorno operativo para la carga de batería
Temperatura de funcionamiento: de 0 C a 40 C
Entrada: 100-240 VCA, frecuencia 50/60Hz, Corriente 5,5 A
Salida: 35-58,6 VCC, 7,2 A máx.
Tiempo de carga máx: 2,5 horas
En los enlaces siguientes se ofrece formación adicional en vídeo:
● Vídeo: Battery safety and storage
● Vídeo: Battery Installation
● Vídeo: Additional charging instructions
4.5 Encendido del robot
Las instrucciones de funcionamiento para prepararse para usar el Spot incluyen el uso de
botones en la parte posterior del robot y la verificación de los indicadores de estado de la luz en
la parte frontal y posterior del robot. Los detalles y los procedimientos ilustrados se recopilan en
una serie de vídeos de formación
● Vídeo: Operating lights explained
● Vídeo: Battery management

V1.0 27
5 Uso de la máquina
5.1 Modos de uso
El Spot puede manejarse en varios modos. Las instrucciones generales para operar el Spot se
recopilan en una serie de vídeos de formación
● Taking Spot for a walk
● Stay Spot, stay
● Spot on stairs
● How Spot sees the world around it
5.1.1 Desplazamiento en escaleras
Al controlar manualmente el Spot, siga estas instrucciones sobre la subida y bajada de escaleras:
1. Utilice el mando para cambiar el Spot al modo de andar en escaleras.
2. Oriente el Spot hacia las escaleras.
3. Utilice la palanca de mando izquierda para hacer que el Spot suba las escaleras, como si
caminara recto en un pasillo.
4. Siempre baje las escaleras con el Spot al revés. Siempre oriente el Spot hacia las escaleras.
V1.0 28
Las siguientes condiciones y/o acciones son esenciales para un desplazamiento seguro en las
escaleras:
Las escaleras enrejilladas, las escaleras de contrahuella abierta o las escaleras
parcialmente transparentes son un desafío de percepción significativo durante la
locomoción en escaleras.
Girar encima de la escalera
El Spot podría caerse por las escaleras y causar lesiones personales o riesgos materiales
No se ponga de pie detrás del Spot.
Al conducir el Spot manualmente: ● Evite girar sobre las escaleras ● No intente subir las escaleras de lado y ● Espere a estar en una zona estable y segura antes
de girar
V1.0 29
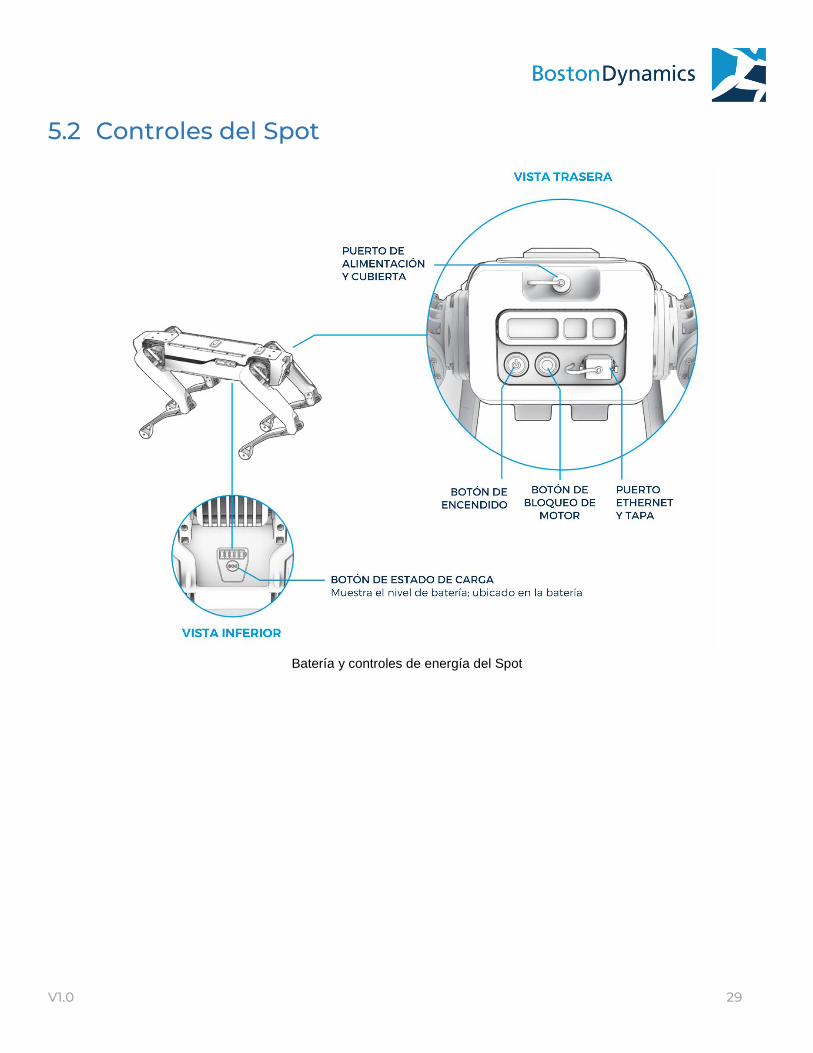
5.2 Controles del Spot
Batería y controles de energía del Spot
V1.0 30
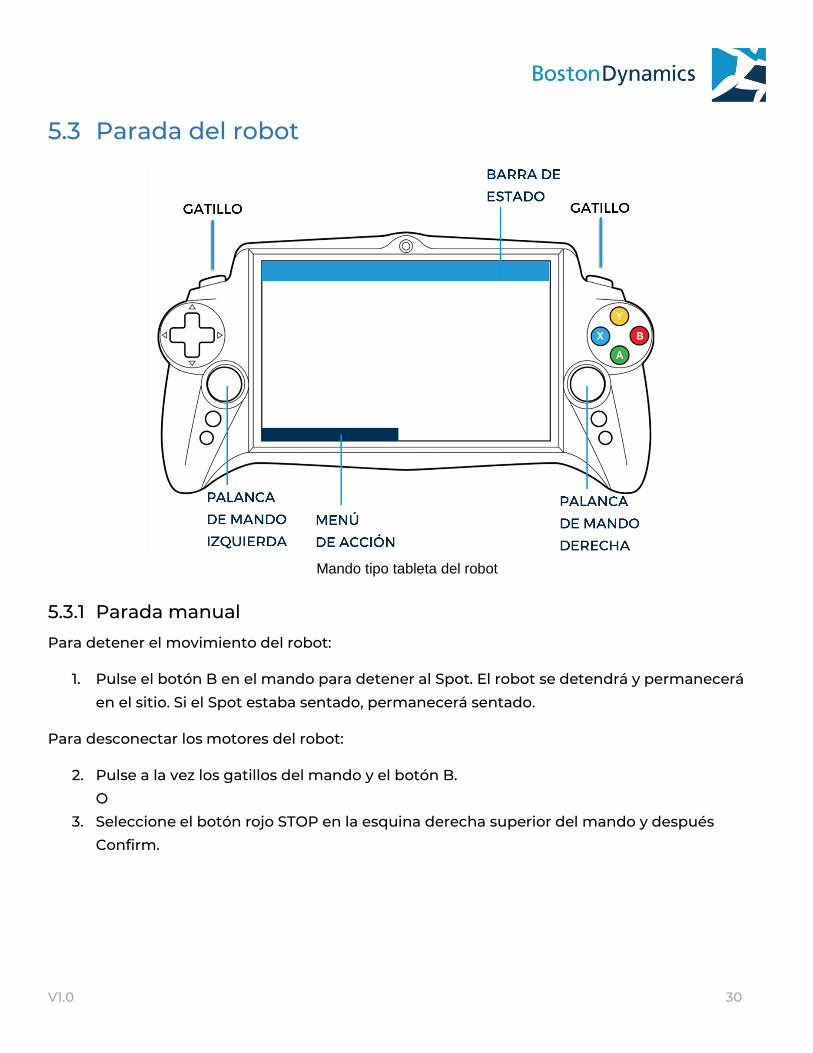
5.3 Parada del robot
Mando tipo tableta del robot
5.3.1 Parada manual
Para detener el movimiento del robot:
1. Pulse el botón B en el mando para detener al Spot. El robot se detendrá y permanecerá
en el sitio. Si el Spot estaba sentado, permanecerá sentado.
Para desconectar los motores del robot:
2. Pulse a la vez los gatillos del mando y el botón B.
O
3. Seleccione el botón rojo STOP en la esquina derecha superior del mando y después
Confirm.

V1.0 31
5.3.2 Parada automática
Parada operativa: el Spot controla sus sensores y puede pausar automáticamente el
movimiento o cortar la energía en ciertas situaciones:
● En caso de pérdida de señal, después de estar 3 segundos sin comunicación activa con el
mando, el Spot dejará de moverse e intentará sentarse. Tras 8 segundos sin
comunicación, el Spot apagará sus motores.
● En caso de caída, los motores de las patas se desconectarán y permanecerán sueltos.
Parada de protección: también se puede detener el Spot interconectando una señal externa
con el puerto de carga útil.
La pérdida de señal podría causar caídas. Sea precavido para asegurar una comunicación fuerte en escaleras y otros entornos peligrosos.
5.3.3 Riesgos potenciales al detener el Spot
Al detener el Spot se frena la propulsión de energía a sus motores. El Spot intentará descender
su cuerpo bajo gravedad antes de la desconexión.
La desconexión de energía de los accionadores de las patas
puede causar la pérdida de la capacidad de equilibrio (solo
es posible bajo control activo).
La parada puede causar la pérdida de estabilidad y peligros
potenciales asociados con las caídas o los vuelcos.
Mantenga siempre una distancia de separación de 2 m.
V1.0 32
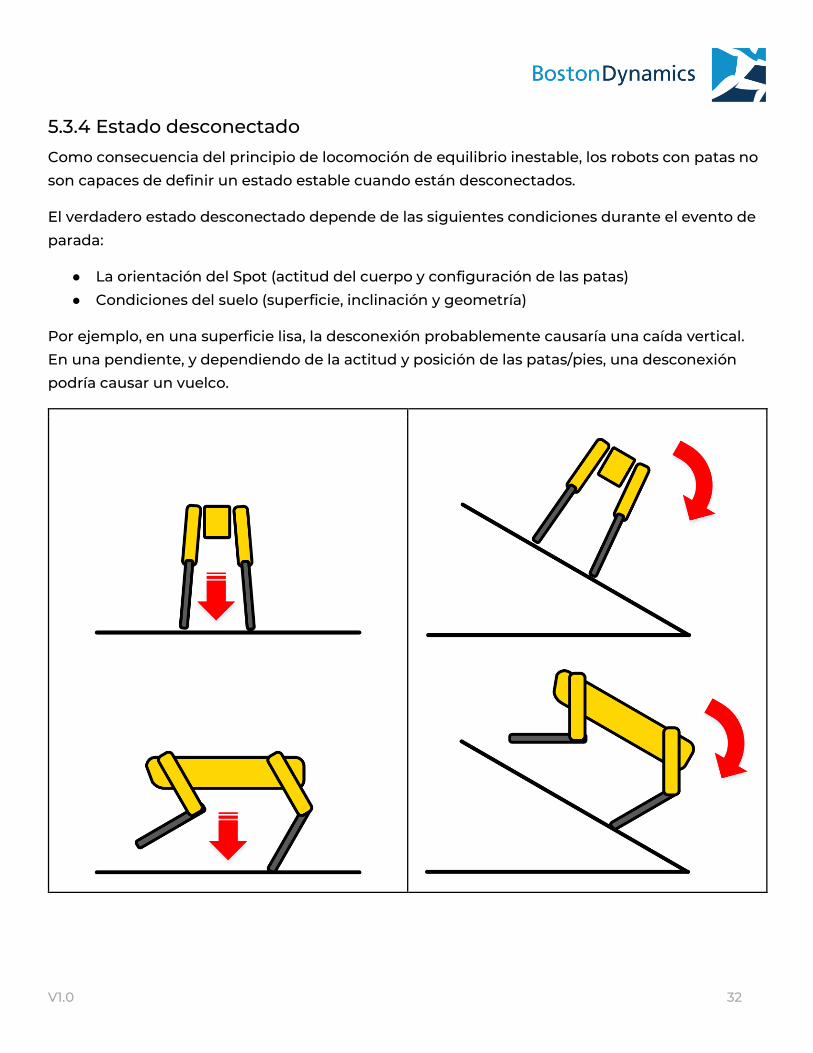
5.3.4 Estado desconectado
Como consecuencia del principio de locomoción de equilibrio inestable, los robots con patas no
son capaces de definir un estado estable cuando están desconectados.
El verdadero estado desconectado depende de las siguientes condiciones durante el evento de
parada:
● La orientación del Spot (actitud del cuerpo y configuración de las patas)
● Condiciones del suelo (superficie, inclinación y geometría)
Por ejemplo, en una superficie lisa, la desconexión probablemente causaría una caída vertical.
En una pendiente, y dependiendo de la actitud y posición de las patas/pies, una desconexión
podría causar un vuelco.
V1.0 33
Las patas del Spot no se bloquean cuando el robot recibe una orden de parada o desconexión. Una configuración de bloqueo de las patas aleatoria probablemente causaría una condición desequilibrada en todo el robot.
Al detenerse, el Spot siempre alcanzará el suelo en juntas sueltas para minimizar la introducción de riesgos adicionales.
5.3.5 Movimientos rápidos inesperados al detener o mantener el equilibrio
El equilibrio dinámico está muy influenciado por las condiciones del entorno en el que la
locomoción sucede.
El Spot siempre intentará mantenerse equilibrado. Esto puede resultar en un movimiento de
alta aceleración de las patas al intentar mantener o recuperar el equilibrio cuando la estabilidad
es difícil de mantener debido al entorno.
La pérdida de estabilidad puede ocurrir repentinamente o se puede anticipar si se observan patrones de movimiento irregulares, que eventualmente causarán la pérdida de estabilidad.
Los fallos de locomoción pueden suceder inesperadamente y provocar la desconexión de los accionadores del robot.
Un fallo puede causar la pérdida de estabilidad y peligros potenciales asociados con las caídas o los vuelcos.
Mantenga siempre una distancia de separación de 2 m
Las patas móviles pueden causar cortes o enredos en los puntos de atrapamiento. El contacto
con las patas puede suceder cuando las patas se agitan, como por ejemplo cuando el robot
intenta recuperarse de un desbalance.
Las patas del Spot tienen la capacidad de realizar movimientos a gran velocidad para poder mantener la estabilidad (bajo condiciones no defectuosas) en una variedad de condiciones ambientales.
V1.0 34
Si la velocidad y la potencia de los movimientos de las patas del Spot fueran limitados, Spot podría perder su capacidad de equilibrio.
5.4 Puesta en marcha tras un paro inesperado
Para reanudar su uso tras un paro inesperado:
1. Primero asegúrese de que se cumplan las condiciones de seguridad y se mantenga
suficiente espacio libre.
2. Repita el procedimiento de puesta en marcha.
3. Si el Spot se sigue deteniendo inesperadamente, póngase en contacto con Boston
Dynamics Support.
Consulte el material de formación adicional
Vídeo: Safety distances from Spot. Vídeo: Spot Startup procedure.
5.5 Apagado del Spot
Cuando esté listo para desactivar Spot, siga este procedimiento:
1. Haga que el Spot camine hasta una ubicación de carga, almacenamiento o transporte.
Haga que el Spot camine en lugar de transportarlo siempre que sea posible.
2. Siente al Spot.
3. Desconecte los motores con el mando.
4. Presione el botón de bloqueo.
5. Apague el robot manteniendo presionado el botón azul en la parte posterior del Spot
durante dos segundos.
6. Seleccione la opción Desconectar del mando.
7. Coloque la batería en el cargador o enchufe el robot a una fuente de energía.

V1.0 35
Consulte el material de formación adicional Vídeo: Spot Operation: Spot Shutdown Procedure
V1.0 36
6 Mantenimiento
Antes de realizar cualquier tipo de limpieza o reinicio, asegúrese de mantener la distancia de
seguridad con el Spot.
6.1 Limpieza del ventilador del cuerpo del robot
La inspección periódica del estado del robot puede indicar si los ventiladores de refrigeración en
la parte inferior del robot necesitan una limpieza. Si los ventiladores están obstruidos con
suciedad, podría provocarse un fallo por sobrecalentamiento.
Para obtener instrucciones detalladas, consulte la documentación Spot System Administration .
6.1.1 Limpieza del robot
Utilice un jabón suave para limpiar el exterior del Spot. No utilice disolventes fuertes. Limpie el
robot solo cuando está apagado.
6.2 Recalibración con SpotCheck
SpotCheck es una característica que mejora la movilidad del Spot mediante la calibración de las
articulaciones y la visión. SpotCheck puede solucionar problemas relacionados con el modo de
andar del robot, como tropezarse por las escaleras o cojear, valorando la configuración actual y
recalibrándola si es necesario.
Las caídas y el uso ordinario con el tiempo pueden causar que las cámaras del robot pierdan su
calibración. Si el robot empieza a chocarse con obstáculos que antes evitaba, SpotCheck puede
valorar y resolver problemas de calibración de las cámaras y restaurar la precisión de la
percepción.
SpotCheck ofrece dos modos:
1. Comprobación de la calibración de articulaciones y cámara
2. Calibración de cámara
V1.0 37
El modo de comprobación de la calibración de articulaciones y cámara realiza pruebas y
recalibra (según sea necesario):
Sensor de celda de carga para las articulaciones de la cadera y las rodillas
Sensor de posición de articulaciones para la cadera y la rodilla
Realiza una comprobación básica (sin calibración) de todas las cámaras incorporadas,
excepto la Spot CAM en caso de que esté instalada.
El modo de calibración de la cámara:
Determina si los intrínsecos o extrínsecos estéreo no están calibrados.
Requiere el uso del panel de calibración que viene incluido con el robot.
6.2.1 Cuándo ejecutar SpotCheck
Cualquiera de los siguientes comportamientos pueden ser un signo de que las articulaciones y/o
la cámara no estén calibradas:
El robot cojea o se tropieza más de lo normal.
El robot se choca con obstáculos que anteriormente solía evitar.
El robot tiene más dificultad de lo normal para moverse en escaleras.
Para devolver el robot a su uso normal, ejecute SpotCheck.
Para obtener instrucciones detalladas, consulte la documentación Spot System Administration.

V1.0 38
7 Situaciones de emergencia
El Spot no está pensado para ser reparado por los propietarios. Si los errores o problemas
persisten después del reinicio del robot, puede que requiera ser revisado por un ingeniero de
Boston Dynamics Support. No intente repararlo usted mismo. Póngase en contacto con Boston
Dynamics Support.
Envíe un correo a [email protected]. Incluya la siguiente información cuando
contacte con el equipo de asistencia:
Número de serie del robot
Descripción del problema
Cualquier reparación no autorizada del Spot invalidará cualquier garantía y seguridad de la
máquina.
7.1 Fuego
En caso improbable de incendio, debe utilizarse un extintor clasificado para su uso con baterías
de ion litio. Si la batería se daña y empieza a perder líquido, no intente manejarla. Póngase en
contacto con el departamento de bomberos local para conseguir ayuda inmediatamente.
7.2 Daño causado por Spot a personas o instalaciones
En el improbable caso de que Spot dañe la instalación o cause daños corporales a una persona,
siga las políticas y procedimientos locales de EH&S (respuesta de emergencia) y asegúrese de
que su personal de EH&S informe del incidente a Boston Dynamics en nuestros contactos de
atención al cliente.
V1.0 39
8 Evaluación de riesgos
Esta sección incluye información sobre la evaluación y reducción de riesgos para los usuarios. Esta sección está destinada a ser leída por el experto en EH&S del usuario o el oficial de seguridad en el lugar de trabajo.
Boston Dynamics ha realizado evaluaciones de riesgos basadas en las aplicaciones previstas y
las condiciones ambientales típicas. En concreto, Boston Dynamics ha:
● Identificado los peligros y estimado los riesgos para las condiciones previstas
predeterminadas.
● Diseñado medidas de reducción de riesgos.
● Evaluado el proceso de reducción de riesgos y los riesgos residuales.
● Proporcionado la información para su uso (en este documento y en forma de señales en el propio robot) para que los propietarios y operadores la implementen.
La gravedad de los peligros asumidos durante la evaluación
de riesgos no es válida para niños ni personas mayores.
La probabilidad de errores, la concienciación y habilidades
de los usuarios asumidas durante la evaluación de riesgos
no son válidas para los usuarios no profesionales.
Siguiendo la evaluación de riesgos del fabricante, se recomienda que los propietarios realicen su
propia evaluación de riesgos teniendo en cuenta las sugerencias en la sección Guía para la
evaluación de riesgos de los propietarios. En concreto, se recomienda a los propietarios que:
● Comprueben el ámbito y la elegibilidad del entorno de trabajo.
● Averigüen los peligros adicionales concretos para sus aplicaciones.
● Estimen los riesgos de peligros adicionales para sus aplicaciones.
● Implementen medidas de seguridad adicionales, si es necesario.
● Implementen las instrucciones en este documento.
V1.0 40
8.1 Evaluación de riesgos del fabricante
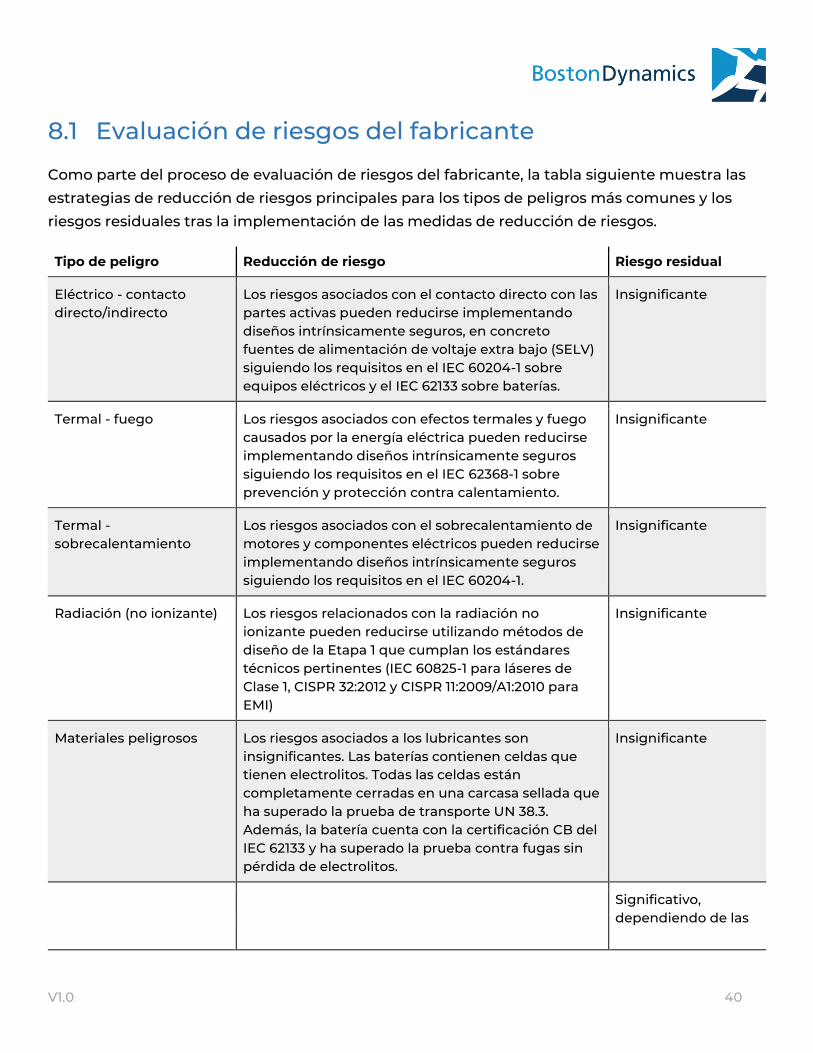
Como parte del proceso de evaluación de riesgos del fabricante, la tabla siguiente muestra las
estrategias de reducción de riesgos principales para los tipos de peligros más comunes y los
riesgos residuales tras la implementación de las medidas de reducción de riesgos.
Tipo de peligro Reducción de riesgo Riesgo residual
Eléctrico - contacto directo/indirecto
Los riesgos asociados con el contacto directo con las partes activas pueden reducirse implementando diseños intrínsicamente seguros, en concreto fuentes de alimentación de voltaje extra bajo (SELV) siguiendo los requisitos en el IEC 60204-1 sobre equipos eléctricos y el IEC 62133 sobre baterías.
Insignificante
Termal - fuego Los riesgos asociados con efectos termales y fuego causados por la energía eléctrica pueden reducirse implementando diseños intrínsicamente seguros siguiendo los requisitos en el IEC 62368-1 sobre prevención y protección contra calentamiento.
Insignificante
Termal - sobrecalentamiento
Los riesgos asociados con el sobrecalentamiento de motores y componentes eléctricos pueden reducirse implementando diseños intrínsicamente seguros siguiendo los requisitos en el IEC 60204-1.
Insignificante
Radiación (no ionizante) Los riesgos relacionados con la radiación no ionizante pueden reducirse utilizando métodos de diseño de la Etapa 1 que cumplan los estándares técnicos pertinentes (IEC 60825-1 para láseres de Clase 1, CISPR 32:2012 y CISPR 11:2009/A1:2010 para EMI)
Insignificante
Materiales peligrosos Los riesgos asociados a los lubricantes son insignificantes. Las baterías contienen celdas que tienen electrolitos. Todas las celdas están completamente cerradas en una carcasa sellada que ha superado la prueba de transporte UN 38.3. Además, la batería cuenta con la certificación CB del IEC 62133 y ha superado la prueba contra fugas sin pérdida de electrolitos.
Insignificante
Significativo, dependiendo de las

V1.0 41
Mecánico (colisiones, elementos móviles, energía almacenada)
Los riesgos no pueden reducirse lo suficiente solo con diseños intrínsicamente seguros en algunas condiciones ambientales. Las salvaguardas externas y otros dispositivos de protección no son factibles para plataformas móviles con movimiento dinámico de todas las partes de la maquinaria. Se proporciona información para el uso.
características del terreno.
Los peligros mecánicos se detallan con mayor profundidad en las secciones siguientes.
8.1.1 Evaluación de riesgos de peligros mecánicos (impactos)
La presencia de peligros mecánicos no se asocia únicamente con los fallos, pero pueden
suceder durante usos regulares por los motivos siguientes:
● El control de equilibrio dinámico hace que el robot se comporte de forma impredecible
cuando se adapta a diferentes superficies u obstáculos. Por lo general, esta situación está
limitada al terreno irregular o a condiciones difíciles de percepción.
● Completar ciertas tareas puede requerir movimientos relativamente rápidos o
interacciones dinámicas con el entorno.
En todos los casos, el resultado de fallos o pérdida de control podría causar un contacto
accidental con los operadores.
El riesgo se reduce al nivel más bajo posible dadas las técnicas de control de última generación. Los eventos de contacto no pueden estar más protegidos por el diseño o los dispositivos de protección, sino implementando instrucciones de uso. Consulte la sección Riesgos potenciales al detener el Spot para obtener más información sobre los peligros de las caídas y de detener el robot y detalles sobre las condiciones practicables para la reducción de riesgo.

V1.0 42
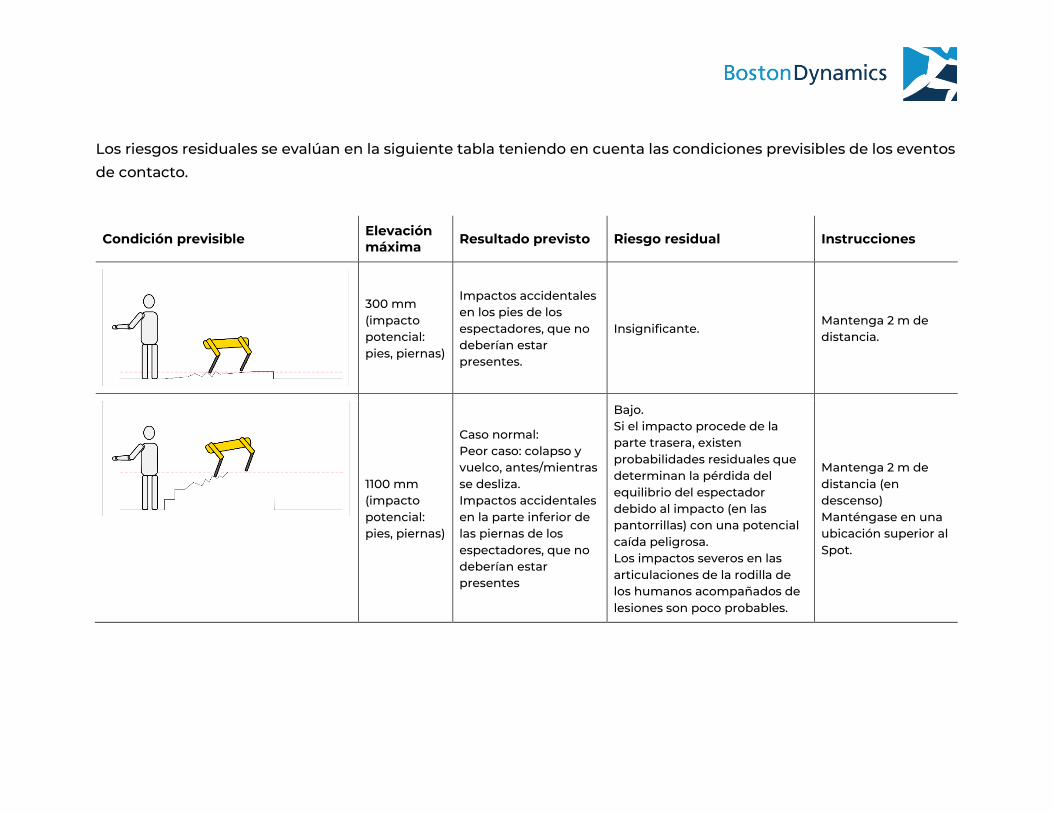
Los riesgos residuales se evalúan en la siguiente tabla teniendo en cuenta las condiciones previsibles de los eventos
de contacto.
Condición previsible Elevación máxima
Resultado previsto Riesgo residual Instrucciones
300 mm (impacto potencial: pies, piernas)
Impactos accidentales en los pies de los espectadores, que no deberían estar presentes.
Insignificante. Mantenga 2 m de distancia.
1100 mm (impacto potencial: pies, piernas)
Caso normal: Peor caso: colapso y vuelco, antes/mientras se desliza. Impactos accidentales en la parte inferior de las piernas de los espectadores, que no deberían estar presentes
Bajo. Si el impacto procede de la parte trasera, existen probabilidades residuales que determinan la pérdida del equilibrio del espectador debido al impacto (en las pantorrillas) con una potencial caída peligrosa. Los impactos severos en las articulaciones de la rodilla de los humanos acompañados de lesiones son poco probables.
Mantenga 2 m de distancia (en descenso) Manténgase en una ubicación superior al Spot.

V1.0 42
>1100 mm
(impacto
potencial:
cuerpo
completo)
Caso normal:
Peor caso: colapso y
vuelco, antes/mientras
se desliza
Alto.
Parte superior del cuerpo
(torso) potencialmente
alcanzada durante una caída
Implementar
salvaguardas
dependiendo de las
propiedades
específicas del
entorno.
v1.0 41
8.1.2 Evaluación de riesgos de peligros mecánicos (puntos de atrapamiento)
La gravedad asociada con los riesgos de puntos de atrapamiento en las piernas y
las caderas puede ser moderada o alta, particularmente para manos y dedos.
Los puntos de atrapamiento son más accesibles en condiciones estáticas (en la
puesta en marcha o durante el mantenimiento) y durante el manejo, cuando los
motores están apagados. La probabilidad asociada con la ocurrencia de tales
peligros en los modos operativos es baja. El acceso ocasional a las articulaciones y
piernas en movimiento se considera un uso incorrecto imprevisible porque no está
asociado con cualquier acción intencional para la protección personal o la mejora
del rendimiento del robot.
v1.0 42
8.2 Guía para la evaluación de riesgos de los
propietarios
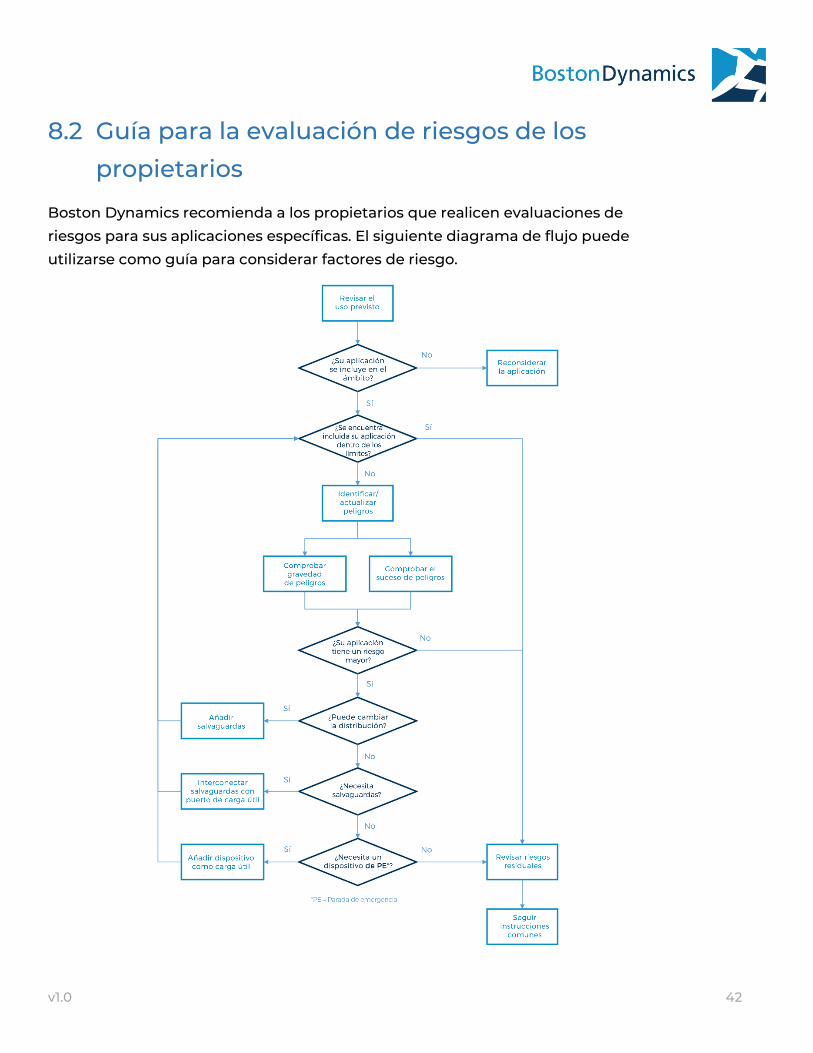
Boston Dynamics recomienda a los propietarios que realicen evaluaciones de
riesgos para sus aplicaciones específicas. El siguiente diagrama de flujo puede
utilizarse como guía para considerar factores de riesgo.

v1.0 43
Diagrama de flujo para la evaluación de riesgos por parte del usuario
8.2.1 Revisión de condiciones ambientales
En concreto, los propietarios deberían revisar las condiciones ambientales y
propiedades de sus distribuciones y determinar si la aplicación podría causar
peligros adicionales.
Los siguientes peligros mecánicos son de riesgo alto:
● Aplastamiento debido a la pérdida de estabilidad o caídas
● Impacto por contacto frontal o lateral
● Enredo en las piernas o entre las piernas y el cuerpo del Spot
Para determinar el nivel de riesgo de los peligros adicionales y modificados, deben
considerarse los siguientes factores de riesgo:
● Gravedad de los peligros mecánicos
● Suceso de los peligros mecánicos
8.2.2 Evaluación de la gravedad de peligros mecánicos
En la siguiente lista no exhaustiva se enumeran las condiciones que pueden
implicar una gravedad alta en un entorno distinto al previsto o en una aplicación
concreta:
● Considere el efecto combinado de los impactos en la parte inferior de las
piernas y la presencia de puntos de tropiezo que puedan suponer un peligro
mayor (por ejemplo, la pérdida de equilibrio)
● Considere el efecto combinado del contacto y la distribución variable,
incluyendo, entre otros, los elementos móviles (vehículos, vías,
transportadores, etc), cambios en la ubicación de los objetos, objetos de
tamaños variables
● Considere las propiedades materiales de los objetos en la distribución que
podrían provocar el contacto, incluyendo, entre otros, los bordes afilados o
raspados, extremidades puntiagudas y espacios con peligro de atrapamiento
y bordes afilados o raspados
● Considere la dirección del impacto potencial y la parte del cuerpo humana
en la que podría impactar
v1.0 44
● Considere el tipo, la forma y las propiedades de los accesorios personalizados
que pueda estar utilizando
v1.0 45
8.2.3 Evaluación de acontecimientos de peligros mecánicos
La evaluación de la probabilidad de los sucesos peligrosos incluye la realización de
una evaluación de riesgos para identificar factores como la frecuencia de
exposición a peligros y la probabilidad de fallos y errores humanos.
Al estimar el riesgo, considere los factores siguientes, relacionados con el suceso de
peligros:
● ¿Su aplicación del robot haría que se enfrentara a peligros más de 4 veces
por hora, con la duración de la exposición siendo mayor a 1 minuto?
● ¿Existe la posibilidad de que el robot Spot se topara con un peligro fuera de
su rutina planeada?
● ¿Las condiciones de desplazamiento u otros factores podrían aumentar la
duración de la exposición a situaciones potencialmente peligrosas?
● ¿Estaría el Spot expuesto a alteraciones de EMI frecuentes u ocasionales que
son específicas de su entorno?
● ¿Se ha comprobado la estabilidad de todas las superficies de paso? ¿O habrá
plataformas móviles o porciones de las superficies de paso?
● ¿Existe la posibilidad de que el Spot se desplace por ubicaciones en las que
podría haber cambios repentinos en la inclinación o movimientos flotantes,
como pistas móviles, superficies de carga de vehículos, etc.?
● ¿Existe la posibilidad de que el Spot rebote al caminar sobre una superficie
flexible?
● ¿Existe la posibilidad de que el Spot tenga que navegar por pasadizos
estrechos o puntos ciegos?
● ¿Existe la posibilidad de que el Spot se tope con plataformas abiertas,
objetos o cuerdas que provoquen tropiezos u otros obstáculos desconocidos
durante la programación de una misión de navegación?
● ¿En su entorno, hay presentes con frecuencia u ocasionalmente vahos o
vapores?
● ¿En su entorno, hay presentes con frecuencia u ocasionalmente chispas o
llamas?
● ¿Se derraman en el suelo con frecuencia u ocasionalmente lubricantes o materiales peligrosos?
v1.0 46
9 Declaración de cumplimiento
9.1 Declaración de conformidad de la UE
Productos en el ámbito de la Declaración de conformidad:
● Robot Spot (Modelo: 02-040236-001)
El robot Spot solo se debe utilizar con los siguientes accesorios:
● Fuente de alimentación del Spot (Modelo: 02-044200-001)
● Batería del Spot (Modelo: 02-036845-001)
● Mando del Spot (Modelo: 03-000845-002)
Los productos en la lista cumplen todas las provisiones pertinentes de las directivas
siguientes:
● Directiva sobre máquinas 2006/42/EC y modificaciones. (MD), limitado a los
siguientes Requisitos esenciales de seguridad y salud (EHSR) y requisitos
suplementarios del Anexo I: 1.1.2, 1.1.3, 1.1.5, 1.3.2, 1.3.6, 1.3.4, 1.3.7, 1.5.6, 3.5.1, 1.5.1,
1.5.2, 1.5.10, 1.5.11, 1.5.12, 1.7.1, 1.7.2, 1.7.3, 1.7.4. Los estándares harmonizados
utilizados para la Presunción de conformidad a la MD, como se refiere en el
Art. 7(2) del MD son: EN ISO 12100:2010, EN 60204-1:2018;
● Directiva 2014/30/UE sobre compatibilidad electromagnética y
modificaciones. (EMCD), limitado a los Requisitos esenciales del Anexo I: 1(a),
1(b). Los estándares harmonizados utilizados para la Presunción de
conformidad con el EMCD, como se refiere en el Art. 13 del EMCD son: EN
61000-6-4:2007/A1:2011, EN 61000-6-2:2005/AC:2005;
● Directiva de equipos radioeléctricos 2014/53/UE y modificaciones. (RED),
limitada a los Requisitos esenciales del Art. 3: 1(a), 1(b), 2. Los estándares
harmonizados utilizados para la Presunción de conformidad al RED, como se
refiere en el Art. 16 del RED son: ETSI EN 301 489-1 V2.2.1 (2019), ETSI EN 301
489-17 V3.2.2 (2019), EN 55032:2012.
Otros estándares técnicos utilizados para los requisitos de diseño son EN IEC
62133-2:2017, EN IEC 62368-1:2014, EN IEC 60825-1:2014/A11:2020.

v1.0 47
9.2 Marcas