Embed Size (px)
DESCRIPTION
Dinamica
Citation preview
“Año de la Promoción de la Industria Responsable y del
Compromiso Climático”
Integrantes: Alcas Andrade, Alexa Ipanaque, Bruno
Fox Zapata, KeylaGutiérrez Laban, ThaysJaramillo Castillo, KarenRuiz Castillo, Mirella
Curso: Dinámica
Docente: Ing. Brenda Sánchez
Tema: Vibraciones Mecánicas
Piura -2014
VIBRACIONES Pág. 1
Introducción
El aumento permanente de las potencias en máquinas, junto con una disminución
simultánea de gasto de materiales, y la alta exigencia de calidad y productividad
industrial, hacen que el análisis dinámico de las vibraciones mecánicas en
máquinas e instalaciones industriales sea cada vez más exacto.
El estudio de las vibraciones mecánicas se ha convertido en algo esencial para el
estudiante de ingeniería mecánica ya que el buen funcionamiento de maquinaria
mecánica está relacionado en muchos casos con su comportamiento vibratorio.
Es importante conocer la clasificación de las vibraciones mecánicas ya que nos
presentan un panorama de los diferentes estudios.
Otra herramienta importante en el estudio de las vibraciones mecánicas es el
modelo matemático. Este procedimiento debe ser preciso ya que los errores
producen información errónea.
El estudio de las vibraciones mecánicas también llamado, mecánica de las
vibraciones, es una rama de la mecánica, o más generalmente de la ciencia,
estudia los movimientos oscilatorios de los cuerpos o sistemas y de las fuerzas
asociadas con ella.
VIBRACIONES Pág. 2
Objetivos
Objetivo general:
Aprender y conocer los conceptos acerca sobre las vibraciones mecánicas
y analizar el comportamiento de un cuerpo rígido sujeto a vibraciones.
Objetivos específicos:
Conocer los conceptos de amortiguaciones
Aprender sobre las fórmulas para poder realizar los ejercicio
. Poder aplicar los conceptos y las formulas en la vida cotidiana y en la
Ingeniería Civil.
VIBRACIONES Pág. 3
Marco Teórico
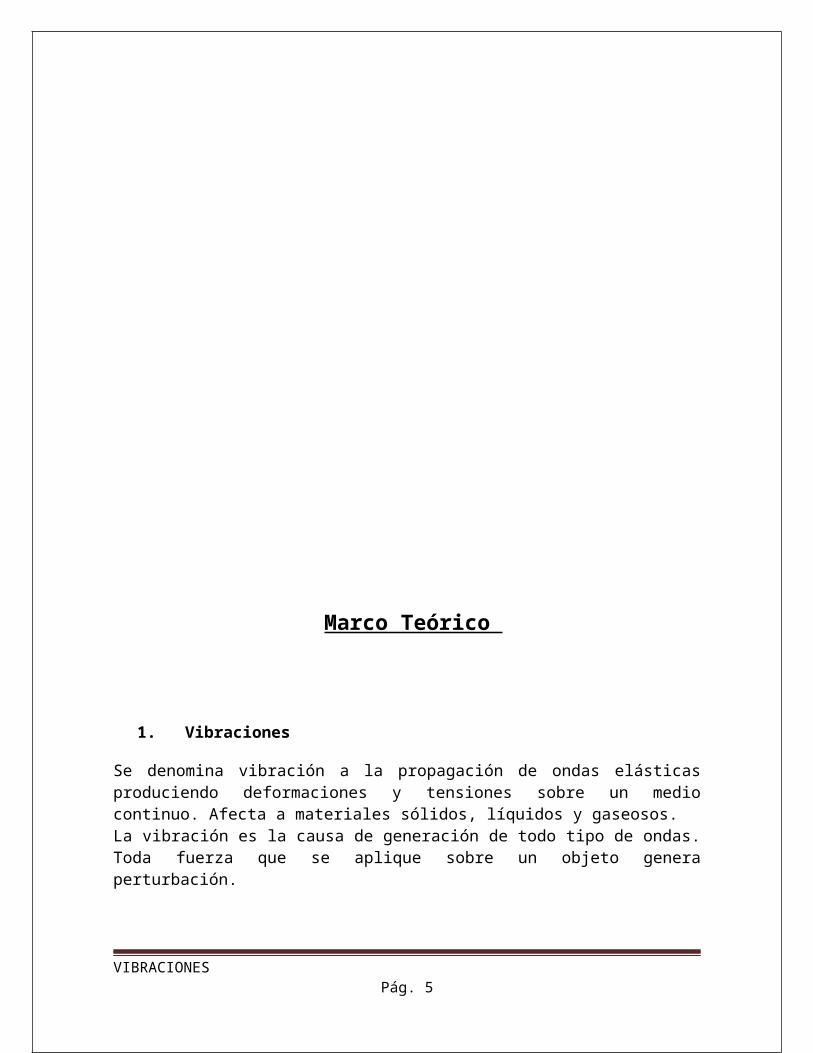
1. Vibraciones
Se denomina vibración a la propagación de ondas elásticas produciendo deformaciones y tensiones sobre un medio continuo. Afecta a materiales sólidos, líquidos y gaseosos.La vibración es la causa de generación de todo tipo de ondas. Toda fuerza que se aplique sobre un objeto genera perturbación.
1.1. Diferencia entre oscilación y vibración
Se debe tener en claro la diferencia entre estos dos conceptos.
En las oscilaciones hay conversión de energías cinética en potencial gravitatoria y viceversa, mientras que en las vibraciones hay intercambio entre energía cinética y energía potencial elástica.
Debida a la pequeñez relativa de las deformaciones locales respecto a los desplazamientos del cuerpo, las vibraciones generan movimientos de menor magnitud que las oscilaciones en torno a un punto de equilibrio.
Además las vibraciones al ser de movimientos periódicos (o cuasiperiódicos) de mayor frecuencia que las oscilaciones suelen generar ondas sonoras lo cual
VIBRACIONES Pág. 4
constituye un proceso disipativo que consume energía. Además las vibraciones pueden ocasionar fatiga de materiales.
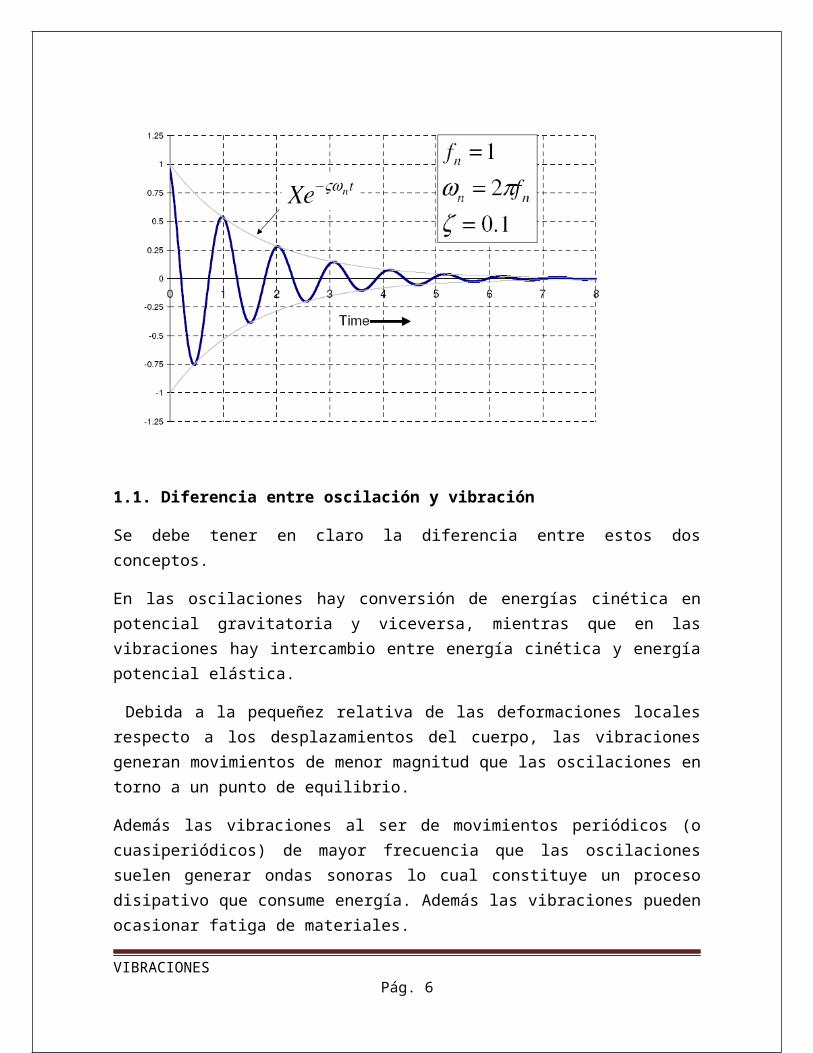
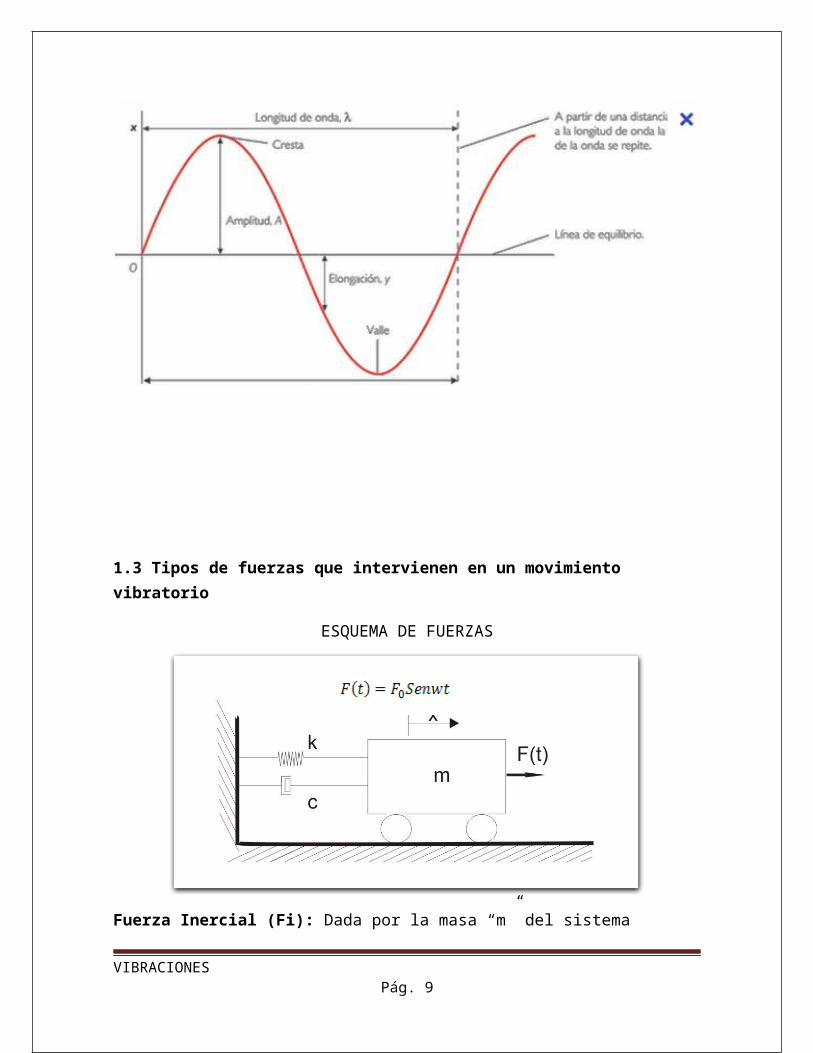
1.2 Conceptos básicos
Elongación:
Es el desplazamiento desde la posición de equilibrio de un sistema.
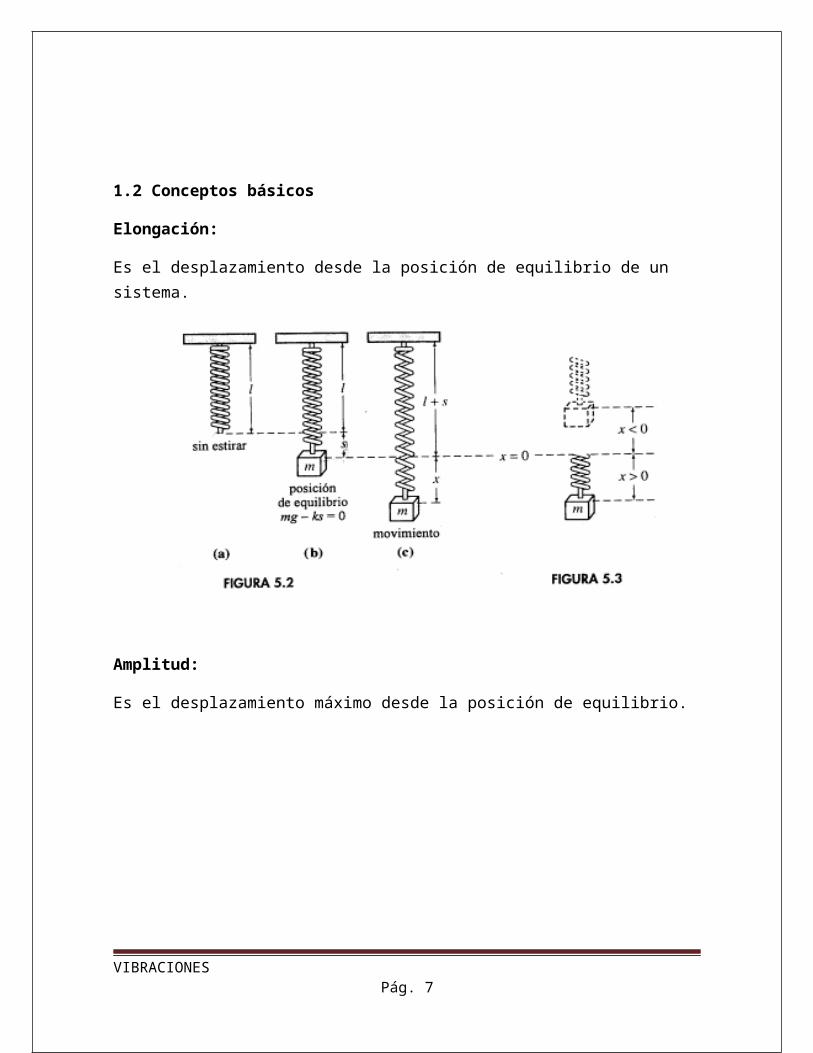
Amplitud:
Es el desplazamiento máximo desde la posición de equilibrio.
VIBRACIONES Pág. 5
Período: Es el intervalo de tiempo necesario para realizar un ciclo completo.
Frecuencia: Es el número de ciclos por unidad de tiempo.
VIBRACIONES Pág. 6
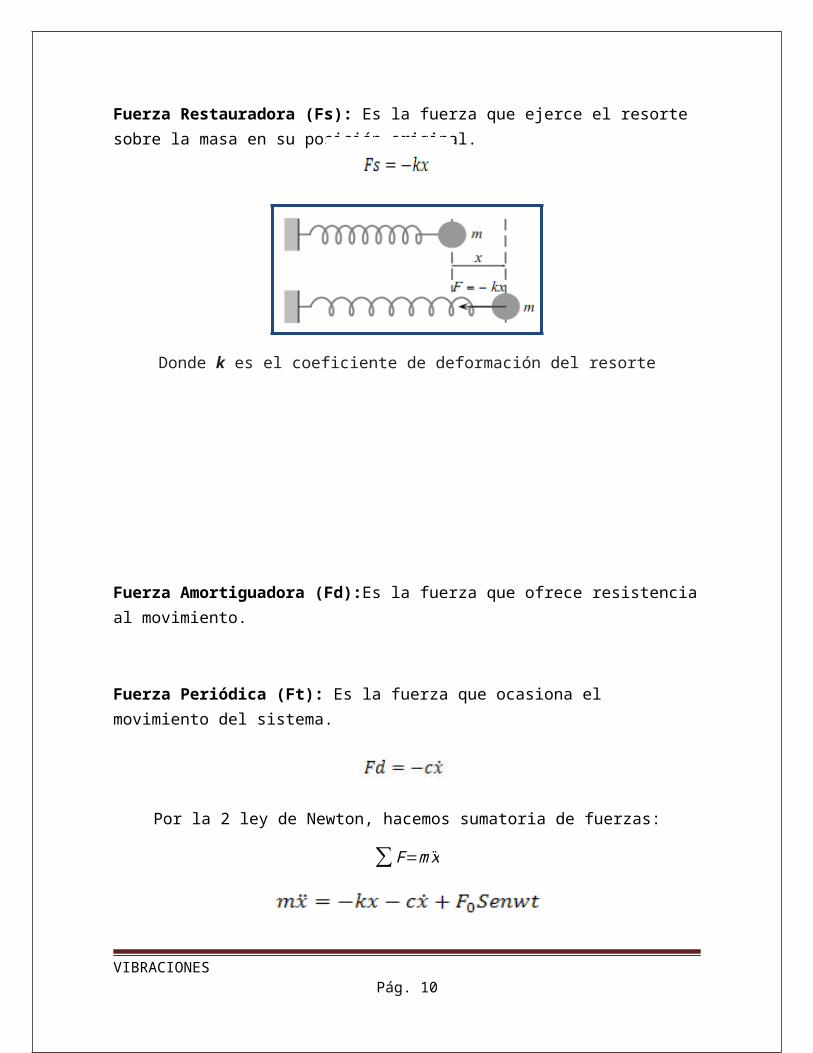
1.3 Tipos de fuerzas que intervienen en un movimiento vibratorio
ESQUEMA DE FUERZAS
Fuerza Inercial (Fi): Dada por la masa “m” del sistema
Fuerza Restauradora (Fs): Es la fuerza que ejerce el resorte sobre la masa en su posición original.
VIBRACIONES Pág. 7
Donde k es el coeficiente de deformación del resorte
Fuerza Amortiguadora (Fd):Es la fuerza que ofrece resistencia al movimiento.
Fuerza Periódica (Ft): Es la fuerza que ocasiona el movimiento del sistema.
Por la 2 ley de Newton, hacemos sumatoria de fuerzas:
∑ F=m x
VIBRACIONES Pág. 8
2. TIPOS DE VIBRACIONES
2.1 VIBRACIONES SIN AMORTIGUAMIENTO
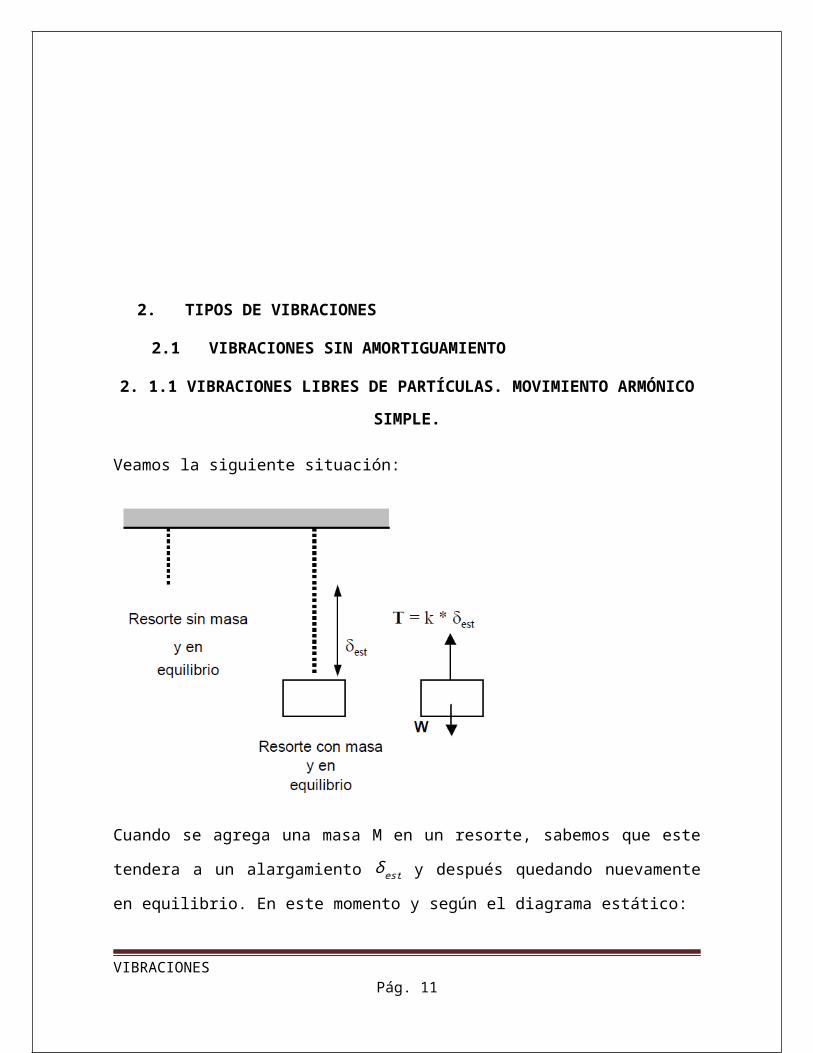
2. 1.1 VIBRACIONES LIBRES DE PARTÍCULAS. MOVIMIENTO ARMÓNICO
SIMPLE.
Veamos la siguiente situación:
Cuando se agrega una masa M en un resorte, sabemos que este tendera a un
alargamiento δ est y después quedando nuevamente en equilibrio. En este momento
y según el diagrama estático:
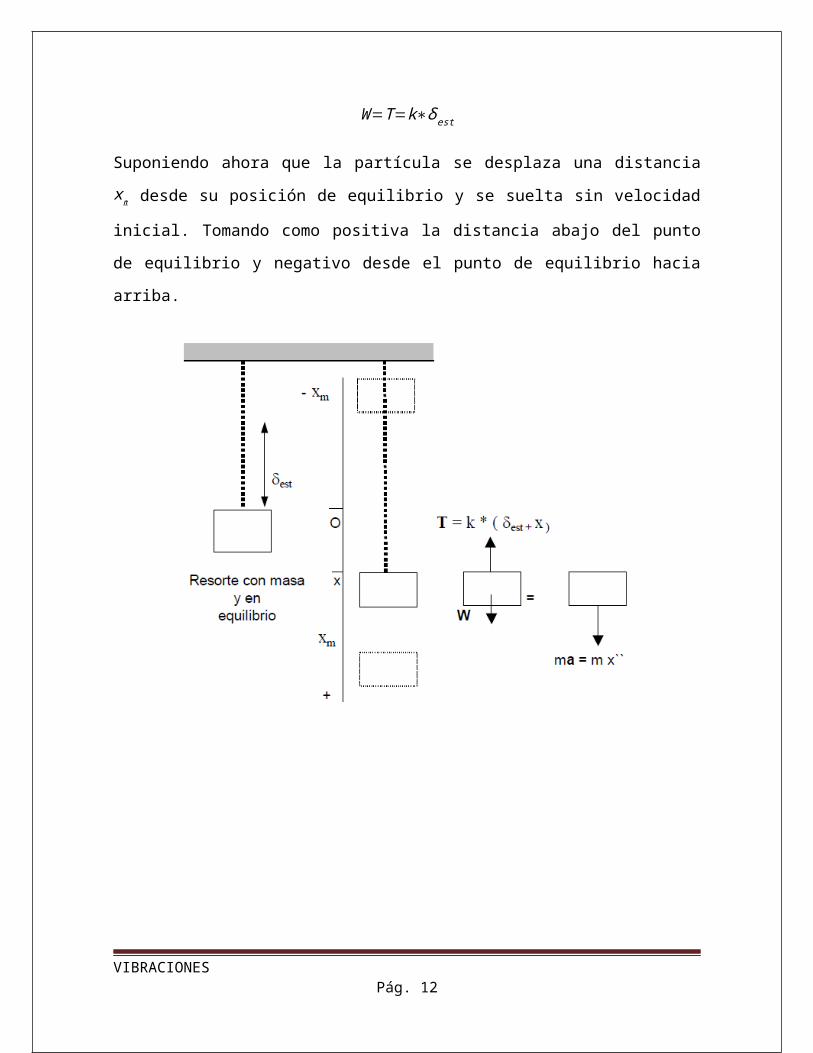
W=T=k∗δ est
Suponiendo ahora que la partícula se desplaza una distancia xm desde su posición
de equilibrio y se suelta sin velocidad inicial. Tomando como positiva la distancia
abajo del punto de equilibrio y negativo desde el punto de equilibrio hacia arriba.
VIBRACIONES Pág. 9
VIBRACIONES Pág. 10
Después de esta acción, se va a generar una amplitud xm. Para el análisis, se
estudiara cuando la masa se encuentre por la posición x, en ese momento y
según el diagrama de equilibrio:
ma=W−T=W−k (δ est+x )=W−k δest−kx peroW=k δ est
→ma=mx ´ ´=−k∗x
→x´ ´=−( km ) x , llamaremos p2= km
→x´ ´+ p2 x=0
El movimiento que define la ecuación anterior se llama Movimiento Armónico
Simple. Se caracteriza por que la aceleración es proporcional al desplazamiento y
de sentido opuesto. La solución general para la ecuación x ´ ´+p2 x=0, es:
x=A sen pt+B cos pt
V=Ap cos pt−Bp sen pt
a=−A p2 s en pt−B p2cos pt
Los valores de A y B, dependen de las condiciones iniciales del movimiento. Se
obtiene que:
A=V O
pB=x0
Después de análisis vectoriales:
x=xm sen ( pt+Φ )
V=x ´=xm pcos ( pt+Φ )
a=V ´=x ´ ´=−xm p2 sen ( pt+Φ )
p: se le llama velocidad angular; xm: es el desplazamiento máximo o amplitud y
Φ: ángulo fase.
VIBRACIONES Pág. 11
Por otro lado tenemos que:
Periodo = τ = 2π / p
Frecuencia = f = 1 / τ = p /2π
Los valores máximos de las magnitudes de la velocidad y la aceleración son:
V m=xm pam=xm p2
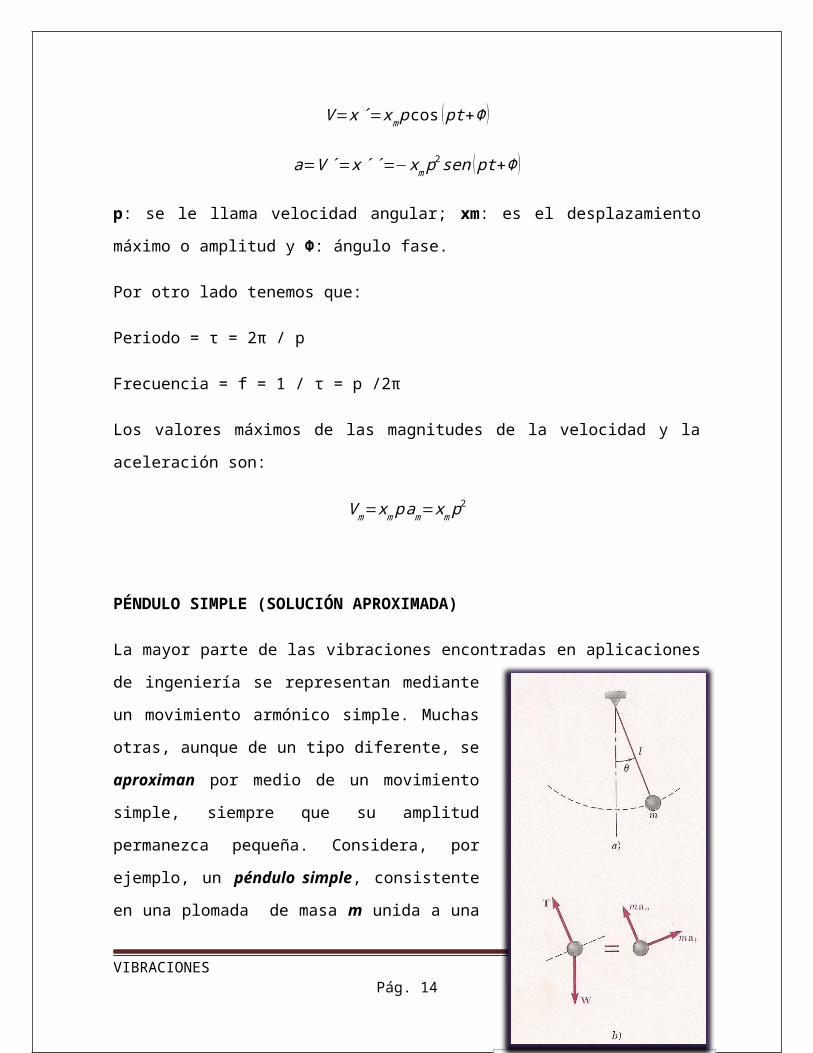
PÉNDULO SIMPLE (SOLUCIÓN APROXIMADA)
La mayor parte de las vibraciones encontradas en aplicaciones de ingeniería se
representan mediante un movimiento armónico
simple. Muchas otras, aunque de un tipo diferente,
se aproximan por medio de un movimiento simple,
siempre que su amplitud permanezca pequeña.
Considera, por ejemplo, un péndulo simple,
consistente en una plomada de masa m unida a una
cuerda de longitud l, que tiene la posibilidad de
oscilar en un plano vertical (fig. 1.2 – 1a). En un
tiempo dado t, la cuerda forma un ángulo θ con la
vertical. Las fuerzas que actúan sobre la plomada
con su peso W y la fuerza T ejercida por la cuerda
(fig. 1.2 – 1b). Al descompensar al vector ma de las
componentes tangencial y normal, con mat dirigida
hacia la derecha, esto es, en la dirección que
corresponde a valores crecientes de θ, y observar
que at = lα = lθ, se escribe
∑ F t=mat :−W senθ=ml θ
Si se observa que W = mg y se divide entre ml, se obtiene
VIBRACIONES Pág. 12
Figura 1.2 – 1
θ+ glsenθ=0…………………ecuacion1.2−1
Para oscilaciones de amplitud pequeña, puede sustituirse sen θ por θ, expresado
en radianes, y se escribe
θ+ glθ=0…………………ecuacion1.2−2
La comparación con la ecuación x+wn2 x=0 muestra que la ecuación diferencial 1.2
– 2 es la de un movimiento armónico simple con una frecuencia circular natural wn
igual a ( gl)1/2
. La solución general de la ecuación 1.2 – 2 puede, por consiguiente.
Expresarse como
θ=θm sen (wn t+Φ)
donde Φm es la amplitud de las oscilaciones y Φ es el ángulo de paso. Al sustituir
en la ecuación Periodo=τn=2πwn
el valor obtenido por wn, se obtiene la siguiente
expresión por el periodo de las oscilaciones pequeñas de un péndulo de longitud l
τ n=2 πwn
=2π √ lg………………………ecuacion1.2−3
PÉNDULO SIMPLE (SOLUCIÓN EXACTA)
La ecuación 1.2 – 3 es solo aproximada. Para obtener una expresión exacta
relativa al periodo de las oscilaciones de un péndulo simple, se debe volver a la
ecuación 1.2 – 1. Multiplicando ambos términos por 2 θ e integrando desde una
posición inicial correspondiente a la máxima desviación, esto es θ=θm yθ=0, se
escribe
( d θdt )2
=2gl
(cosθ−cosθm )
VIBRACIONES Pág. 13
Si se sustituye cos θ por 1 – 2 sen2 (θ/2) y cos θm por una expresión similar,
resolviendo para dt, y se integra sobre un cuarto de periodo desde t = 0, θ = 0
hasta t = τ n / 4, θ = θm, se tiene
τ n=2√ lg∫0θm
dθ
√sen2 (θm/2 )−sen2 (θ/2 )
La integral en el miembro del lado derecho se conoce como una integral elíptica;
ésta no puede expresarse en términos de las funciones algebraicas o
trigonométricas usuales. Sin embargo,
sen (θ/2 )=sen (θm/2 ) senΦ
se puede escribir
τ n=4 √ lg∫0π /2
dΦ
√1−sen2 (θm/2 ) sen2Φ…………………ecuacion1.3−1
Donde la integral que se obtiene, denotada comúnmente por K, puede calcularse
utilizando métodos de integración numérica. También puede encontrase en tablas
de integrales elípticas para diversos valores de θm / 2. Para comparar el resultado
que acaba de obtenerse con el de la sección anterior, se escribe la ecuación 1.3 –
1 en la forma
τ n=2Kπ (2π √ lg )…………………ecuacion1.3−2
VIBRACIONES Pág. 14
VIBRACIONES LIBRES DE CUERPOS RÍGIDOS
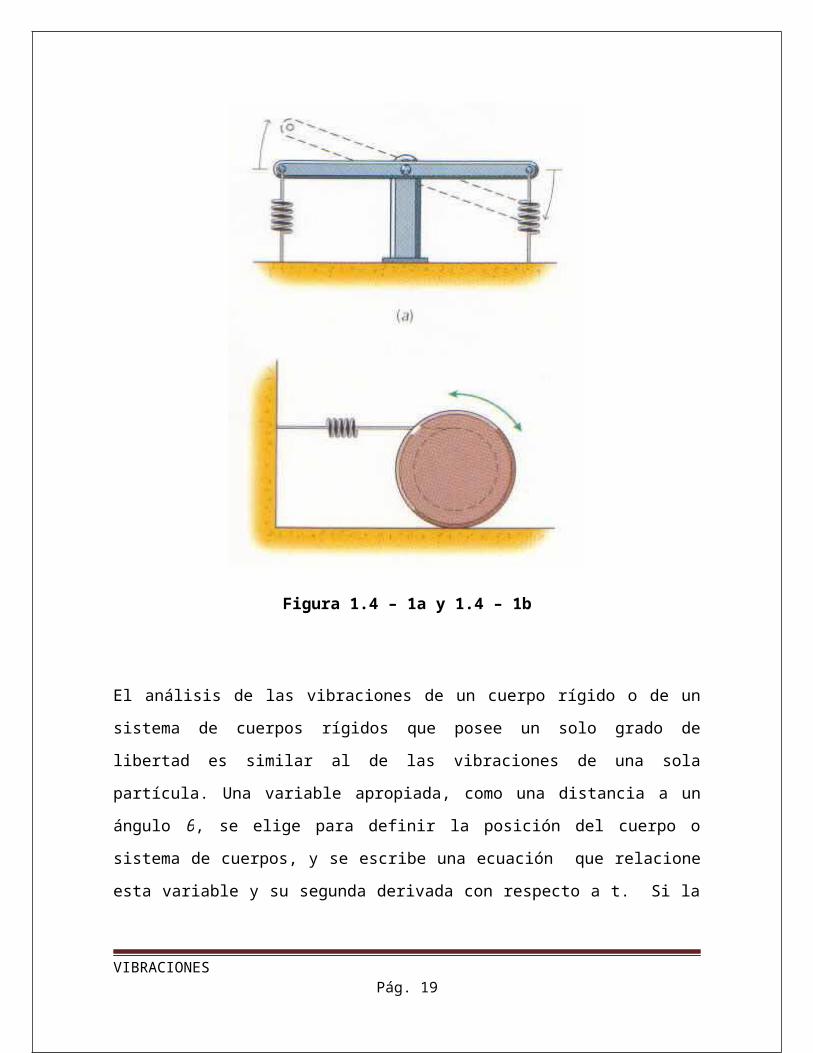
Un cuerpo rígido que oscile en torno a un eje fijo (fig. 1.4 – 1a) y una rueda que
oscile sobre una superficie plana (fig. 1.4 – 1b) constituyen sistemas vibrantes de
un solo grado de libertad. El análisis de estos sistemas de cuerpos rígidos es
igual, en esencia al de un punto material. Primero, se dibuja el diagrama de cuerpo
libre correspondiente a una posición arbitraria del cuerpo rígido. Después, se
escriben las ecuaciones del movimiento. Por último, se utilizan los principios de la
cinemática para reducir las ecuaciones del movimiento a una sola ecuación
diferencial que contenga una sola variable que describa la posición y movimiento
del cuerpo rígido.
Figura 1.4 – 1a y 1.4 – 1b
VIBRACIONES Pág. 15

El análisis de las vibraciones de un cuerpo rígido o de un sistema de cuerpos
rígidos que posee un solo grado de libertad es similar al de las vibraciones de una
sola partícula. Una variable apropiada, como una distancia a un ángulo θ, se elige
para definir la posición del cuerpo o sistema de cuerpos, y se escribe una
ecuación que relacione esta variable y su segunda derivada con respecto a t. Si
la ecuación que se obtiene es de la misma forma que la ecuación 1.2 – 1, esto es,
si se tiene
x+wn2 x=0 o θ+wn
2θ=0……………ecuacion1.4−1
La vibración considerada es un movimiento armónico simple. El periodo y la
frecuencia natural de la vibración pueden obtenerse entonces identificando wn y
sustituyendo su valor en las ecuaciones Periodo=τn=2πwn
y
Frecuencianatural=f n=1τn
=wn
2π .
En general, una forma simple de obtener una de las ecuaciones 1.3 – 1 consiste
en expresar que el sistema de las fuerzas externas es equivalente al sistema de
las fuerzas efectivas dibujando una ecuación de diagramas de cuerpo libre para un
valor arbitrario de la variable y escribiendo la ecuación de movimiento apropiada.
Recordando que el objetivo debe ser la determinación del coeficiente de la
variable x o θ, no la determinación de la variable misma o de la derivada x o θ. Al
igualar este coeficiente a wn2, se obtiene la frecuencia circular natural wn de la cual
es posible determinar a τ n y f n.
VIBRACIONES Pág. 16
APLICACIÓN DEL PRINCIPIO DE LA CONSERVACIÓN DE LA ENERGÍA
La ley de la conservación de la energía constituye el primer principio de la
termodinámica y afirma que la cantidad total de energía en cualquier sistema
aislado (sin interacción con ningún otro sistema) permanece invariable con el
tiempo, aunque dicha energía puede transformarse en otra forma de energía. En
resumen, la ley de la conservación de la energía afirma que la energía no puede
crearse ni destruirse, sólo se puede cambiar de una forma a otra, por ejemplo,
cuando la energía eléctrica se transforma en energía calorífica en un calefactor.
El principio de conservación de la energía proporciona una forma conveniente de
determinar el periodo de vibración de un cuerpo rígido o de un sistema de cuerpos
rígidos que poseen un solo grado de libertad, una vez que se ha establecido que
el movimiento del sistema es un movimiento armónico simple o que puede
aproximarse mediante un movimiento armónico simple. Al elegir una variable
apropiada, como la distancia x o el ángulo θ, se consideran dos posiciones
particulares del sistema:
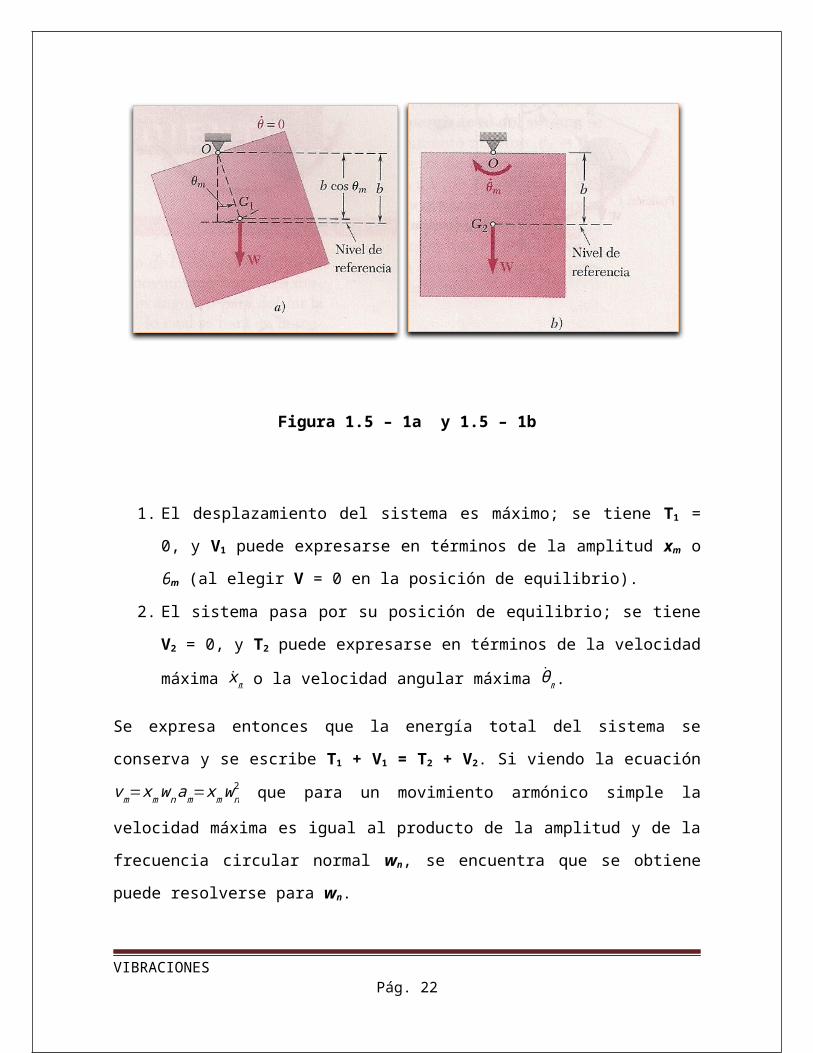
Figura 1.5 – 1a y 1.5 – 1b
VIBRACIONES Pág. 17
1. El desplazamiento del sistema es máximo; se tiene T1 = 0, y V1 puede
expresarse en términos de la amplitud xm o θm (al elegir V = 0 en la posición
de equilibrio).
2. El sistema pasa por su posición de equilibrio; se tiene V2 = 0, y T2 puede
expresarse en términos de la velocidad máxima xm o la velocidad angular
máxima θm.
Se expresa entonces que la energía total del sistema se conserva y se escribe T1
+ V1 = T2 + V2. Si viendo la ecuación vm=xmwnam=xmwn2 que para un movimiento
armónico simple la velocidad máxima es igual al producto de la amplitud y de la
frecuencia circular normal wn, se encuentra que se obtiene puede resolverse para
wn.
VIBRACIONES Pág. 18
2.1.2 Vibraciones forzadas sin amortiguamiento
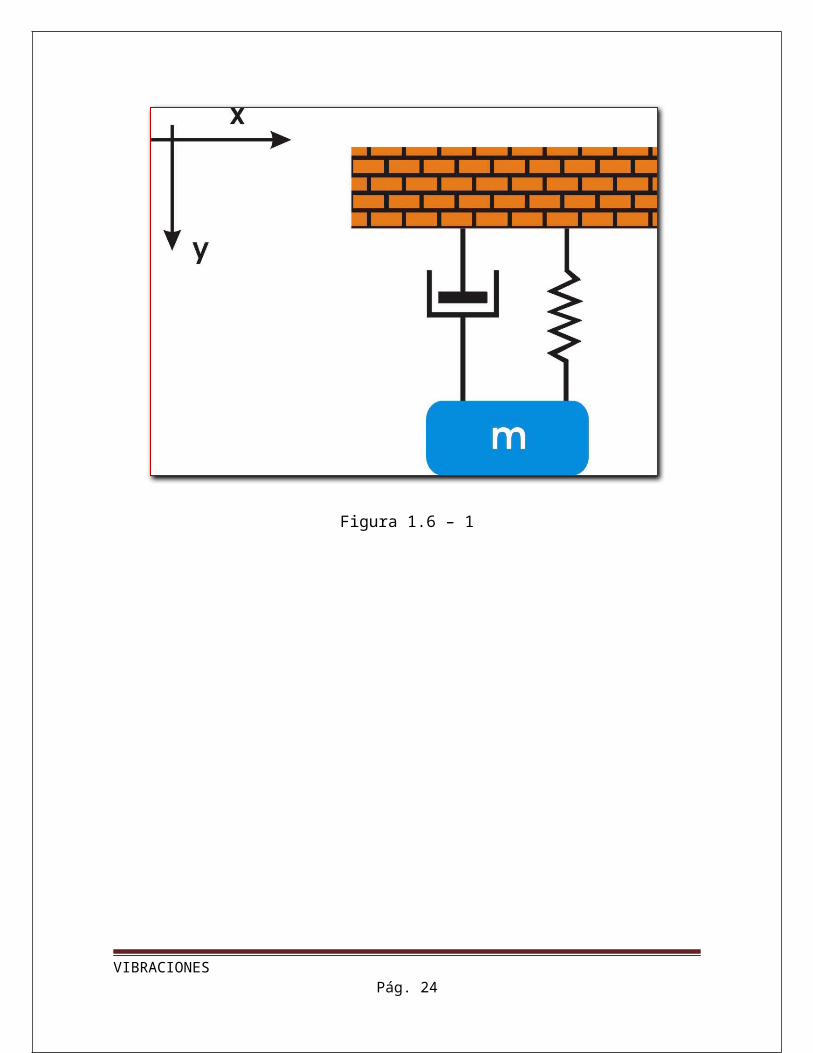
Consideremos el sistema mecánico Amortiguador – Masa – Resorte
Figura 1.6 – 1
VIBRACIONES Pág. 19
Utilizando la segunda Ley de Newton de movimiento translacional: La aceleración
de cualquier cuerpo rígido es directamente proporcional a la fuerza que actúe
sobre él e inversamente proporcional a la masa del cuerpo, es decir F = ma.
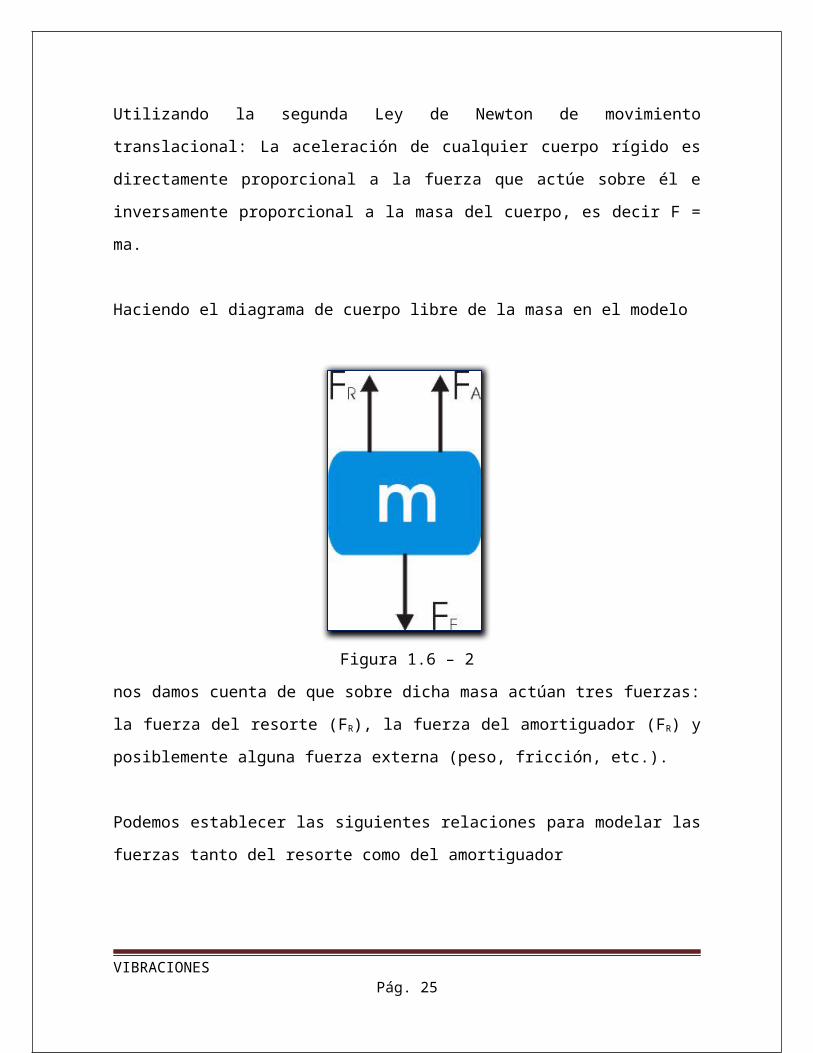
Haciendo el diagrama de cuerpo libre de la masa en el modelo
Figura 1.6 – 2
nos damos cuenta de que sobre dicha masa actúan tres fuerzas: la fuerza del
resorte (FR), la fuerza del amortiguador (FR) y posiblemente alguna fuerza externa
(peso, fricción, etc.).
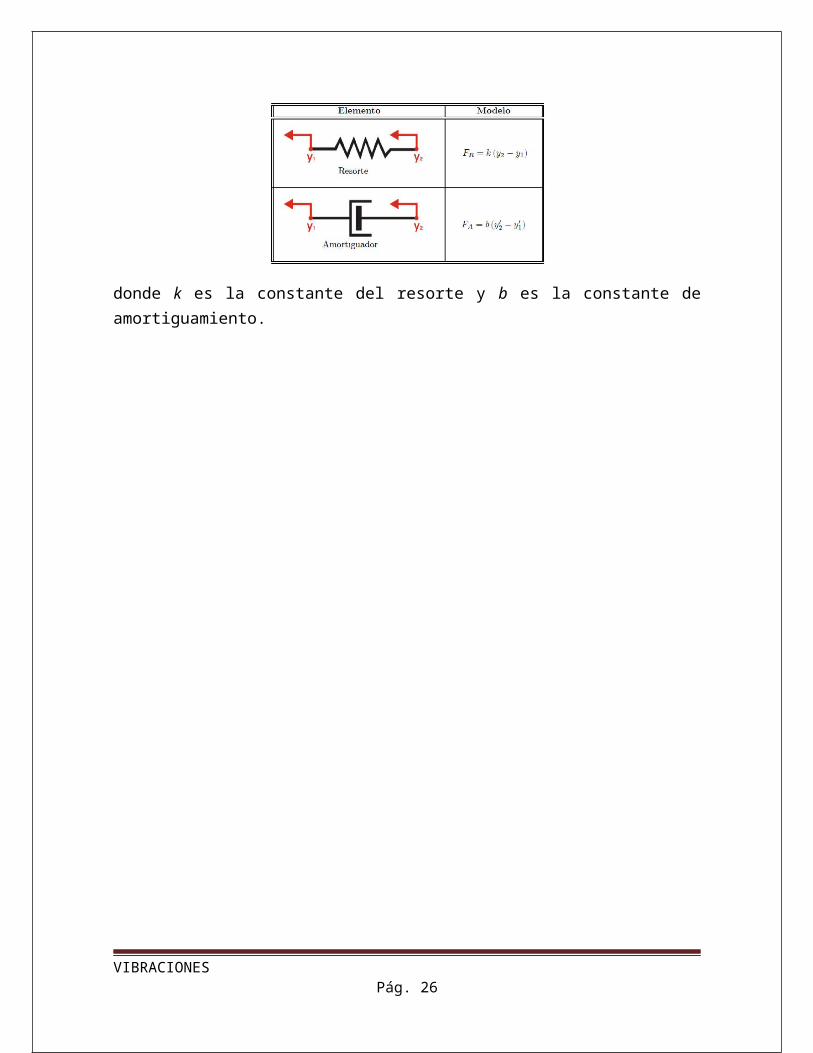
Podemos establecer las siguientes relaciones para modelar las fuerzas tanto del
resorte como del amortiguador
donde k es la constante del resorte y b es la constante de amortiguamiento.
VIBRACIONES Pág. 20
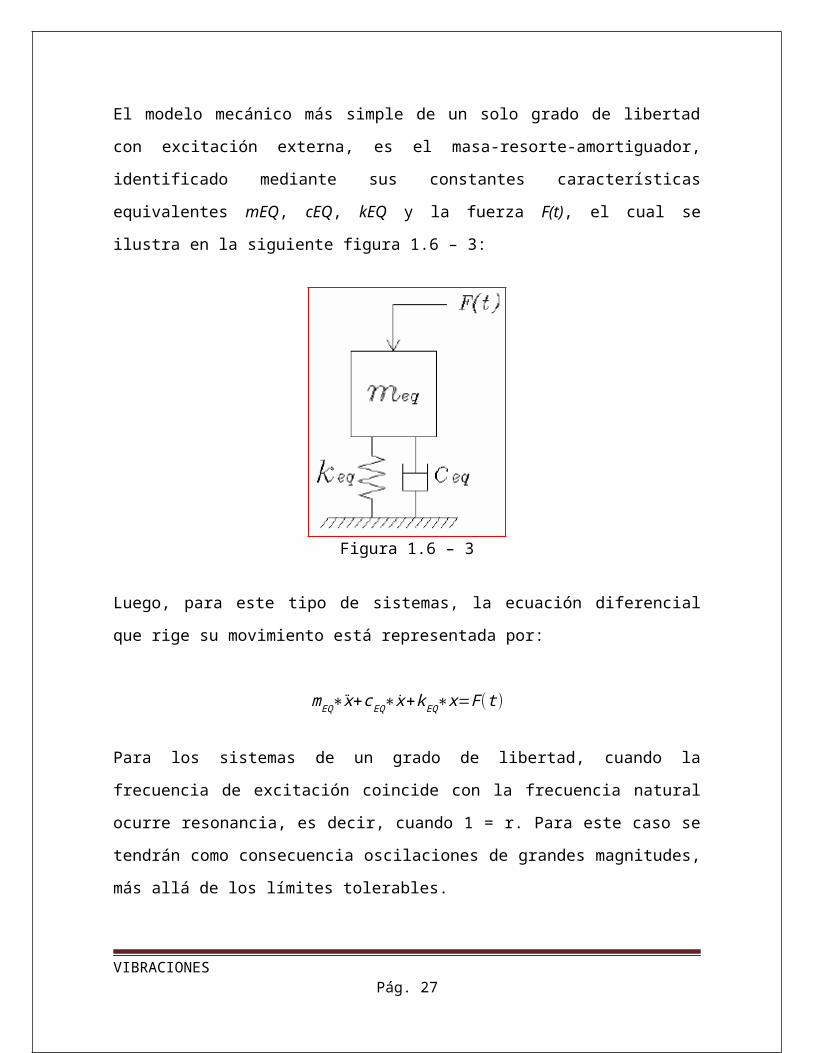
El modelo mecánico más simple de un solo grado de libertad con excitación
externa, es el masa-resorte-amortiguador, identificado mediante sus constantes
características equivalentes mEQ, cEQ, kEQ y la fuerza F(t), el cual se ilustra en la
siguiente figura 1.6 – 3:
Figura 1.6 – 3
Luego, para este tipo de sistemas, la ecuación diferencial que rige su movimiento
está representada por:
mEQ∗x+cEQ∗x+k EQ∗x=F (t )
Para los sistemas de un grado de libertad, cuando la frecuencia de excitación
coincide con la frecuencia natural ocurre resonancia, es decir, cuando 1 = r. Para
este caso se tendrán como consecuencia oscilaciones de grandes magnitudes,
más allá de los límites tolerables.
Con respecto a la excitación, los sistemas desbalanceados representan una
excitación de tipo oscilatorio, la cual depende del momento de desbalance (m·e) y
de la frecuencia de la excitación (Ω).
Además de las definiciones efectuadas para los sistemas vibrantes sin excitación
externa (libres), en los sistemas forzados se hace necesario definir otras variables
para el análisis de los mismos.
VIBRACIONES Pág. 21
La relación de frecuencias asocia la frecuencia natural del sistema con la
frecuencia de excitación. Se designa con el símbolo r, es adimensional y se
expresa según la ecuación
r= Ωwn
El factor de amplificación dinámico se designa con el símbolo Κ y es adimensional
y se expresa por:
K= 1
√ (1−r 2)+ (2∗ζ∗r )2
El retraso de fase se designa con el símbolo φ y se expresa en grados o radianes
y se expresa según la ecuación:
Φ=tg−1( 2∗ζ∗r1−r2 )En el estudio de vibraciones forzadas son muy útiles los gráficos de factor de
amplificación dinámico y retraso de fase contra la relación de frecuencias. Para el
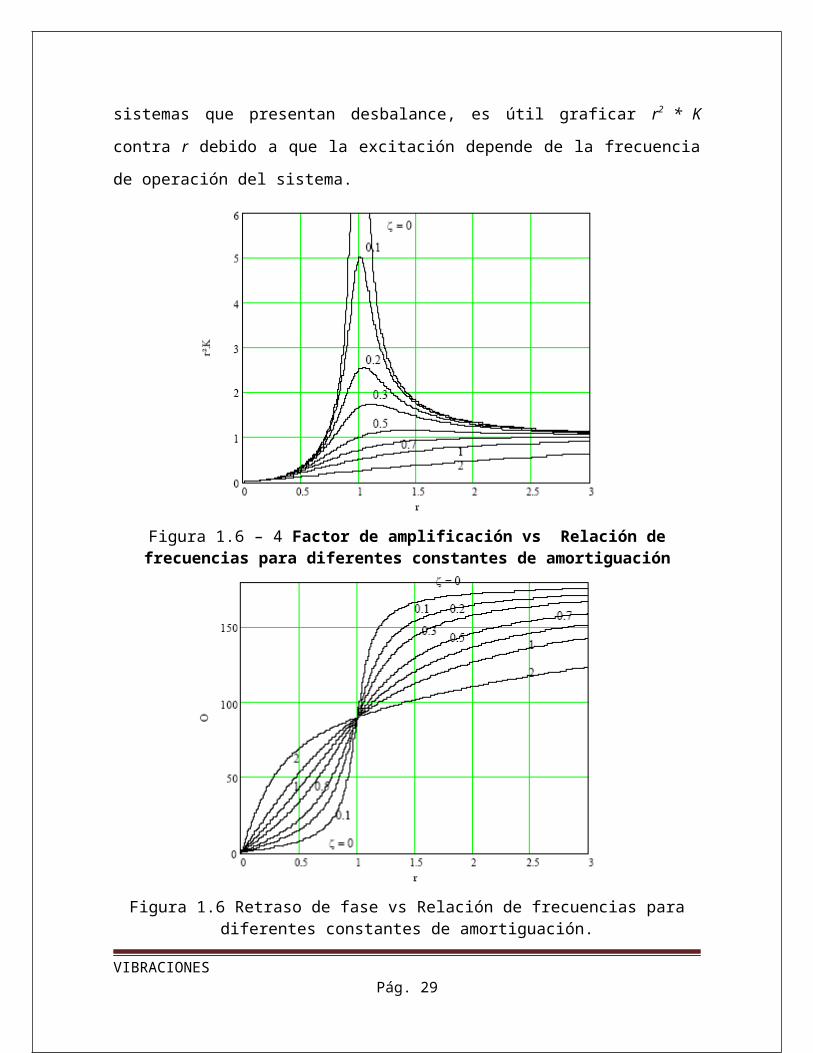
caso de sistemas que presentan desbalance, es útil graficar r2 * K contra r debido
a que la excitación depende de la frecuencia de operación del sistema.
Figura 1.6 – 4 Factor de amplificación vs Relación de frecuencias para diferentes constantes de amortiguación
VIBRACIONES Pág. 22
Figura 1.6 Retraso de fase vs Relación de frecuencias para diferentes constantes de amortiguación.
Un cuerpo experimenta un movimiento vibratorio u ondulatorio cuando se desplaza
varias veces a uno y otro lado de la posición fija que tenia inicialmente. Vibración
mecánica, oscilación, movimiento periódico, etc. son conceptos utilizados para
describir el movimiento de un elemento, sistema o en si de una máquina. Una
forma simple de definir vibración.
VIBRACIONES Pág. 23
VIBRACIONES Pág. 24
2.2 Vibraciones con amortiguamiento
2.2.1. Vibraciones libres amortiguadas.
En las situaciones anteriores se notaban que las vibraciones estaban libres de
amortiguamientos. La realidad es que todas las vibraciones son amortiguadas,
especialmente por las fuerzas de rozamiento. Un tipo de amortiguamiento de
especial interés es el amortiguamiento viscoso causado por la fricción fluida a
velocidades bajas y moderadas. Este tipo de amortiguamiento está
caracterizado por el hecho de que la fuerza de fricción o rozamiento es
directamente proporcional a la velocidad del cuerpo en movimiento. Para el
análisis supondremos que un cuerpo está unido al émbolo de un amortiguador.
Se dice que un sistema tiene amortiguamiento cuando posee elementos que
disipan energía. Existen varios tipos de amortiguamiento: amortiguamiento
viscoso, lo experimentan los cuerpos que se mueven con una velocidad
moderada en el interior de fluidos; amortiguamiento de Coulomb, producido por
el movimiento relativo de superficies secas; y el amortiguamiento estructural,
es producido por la fricción interna del material elástico. En esta sección nos
dedicaremos únicamente al estudio del amortiguamiento viscoso.
VIBRACIONES Pág. 25
2.3.1 Amortiguador viscoso lineal.
Este tipo de amortiguamiento se presenta en forma natural cuando sistemas
mecánicos oscilan en el interior de un medio fluido. También aparece en
sistemas mecánicos utilizados para regular la vibración. Una forma de
representarlo es la mostrada en la figura .
Este tipo de amortiguador está formado por un pistón el cual se mueve en el
interior de un cilindro el cual contiene un fluido viscoso como el aceite. Al moverse
el émbolo se opone el fluido el cual debe atravesar pequeños orificios practicados
en el émbolo.
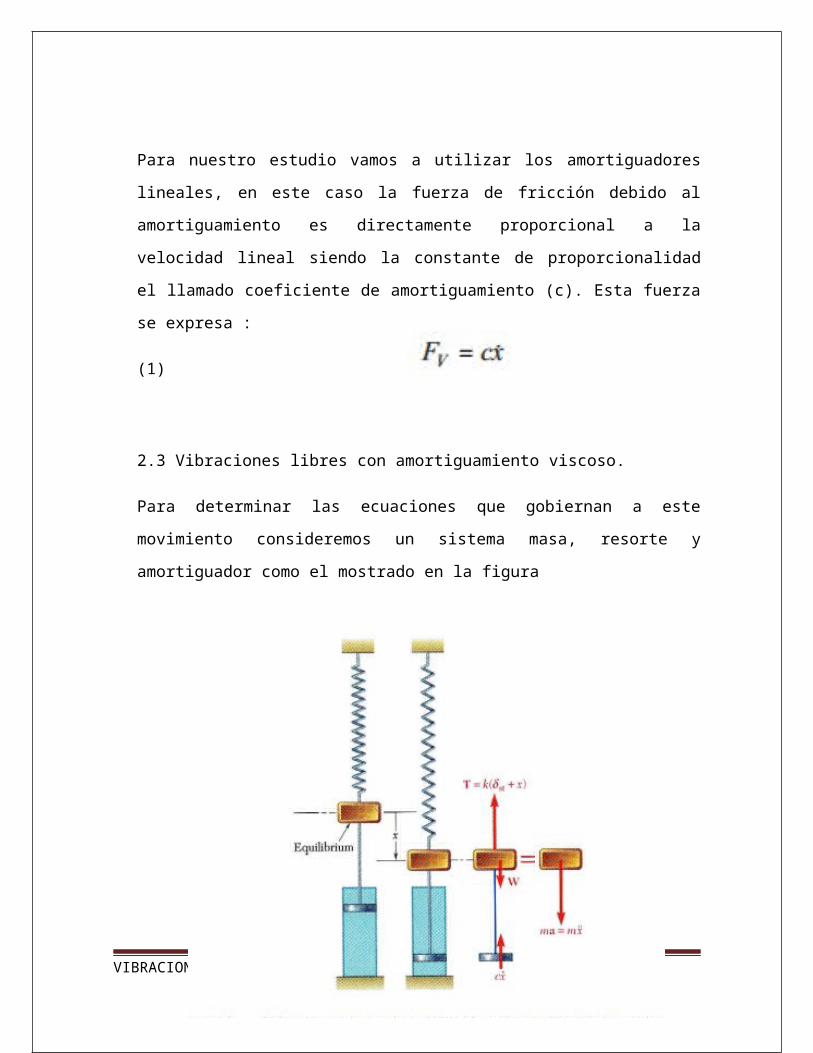
Para nuestro estudio vamos a utilizar los
amortiguadores lineales, en este caso la
fuerza de fricción debido al amortiguamiento
es directamente proporcional a la velocidad lineal siendo la constante de
proporcionalidad el llamado coeficiente de amortiguamiento (c). Esta fuerza se
expresa :
(1)
2.3 Vibraciones libres con amortiguamiento viscoso.
VIBRACIONES Pág. 26
Para determinar las ecuaciones que gobiernan a este movimiento
consideremos un sistema masa, resorte y amortiguador como el mostrado en
la figura
Figura
Diagrama de cuerpo libre de una partícula de masa m con amortiguamiento.
Aplicando la segunda ley de Newton al bloque se tiene
VIBRACIONES Pág. 27
Recordando que en el caso de equilibrio estático,
, la ecuación anterior se escribe:
(3)
La ecuación (3) es una ecuación diferencial homogénea de segundo orden con
coeficientes constantes. La teoría de las ecuaciones diferenciales nos dice que
la solución es de la forma:
Remplazando la ecuación (3 ) conjuntamente con sus derivadas en la ecuación
(2) se obtiene la ecuación característica expresada por :
La solución general de la ecuación se escribe:
VIBRACIONES Pág. 28
Las constantes B y C se determinan a partir de las condiciones iníciales,
mientras que λ1 y λ2 se determinan de la ecuación característica. Debe
observarse además que el comportamiento del sistema depende de la cantidad
subradical, ésta puede ser positiva, nula o negativa.
Coeficiente de amortiguamiento crítico . Es el valor del coeficiente de
amortiguamiento para el cual se hace cero la cantidad subradical de
la ecuación (3), en consecuencia:
El coeficiente de amortiguamiento crítico representa la cantidad mínima de
amortiguamiento requerida para que el movimiento no sea vibratorio.
La solución de la ecuación diferencial (3 ) tiene tres formas.
A. Movimiento sobre amortiguado. En este caso c > ccr, entonces las dos
raíces de la ecuación característica son reales y diferentes. Por tanto la
solución puede escribirse:
B. Movimiento críticamente amortiguado. Aquí c = ccr, en este caso las :
C. Movimiento
subamortiguado. Las raíces de la ecuación (3) son:
VIBRACIONES Pág. 29
Donde α =c/2m y ωd es la frecuencia circular amortiguada dada por :
(4)
Remplazando la ecuación (4 ) en (3 ) resulta:
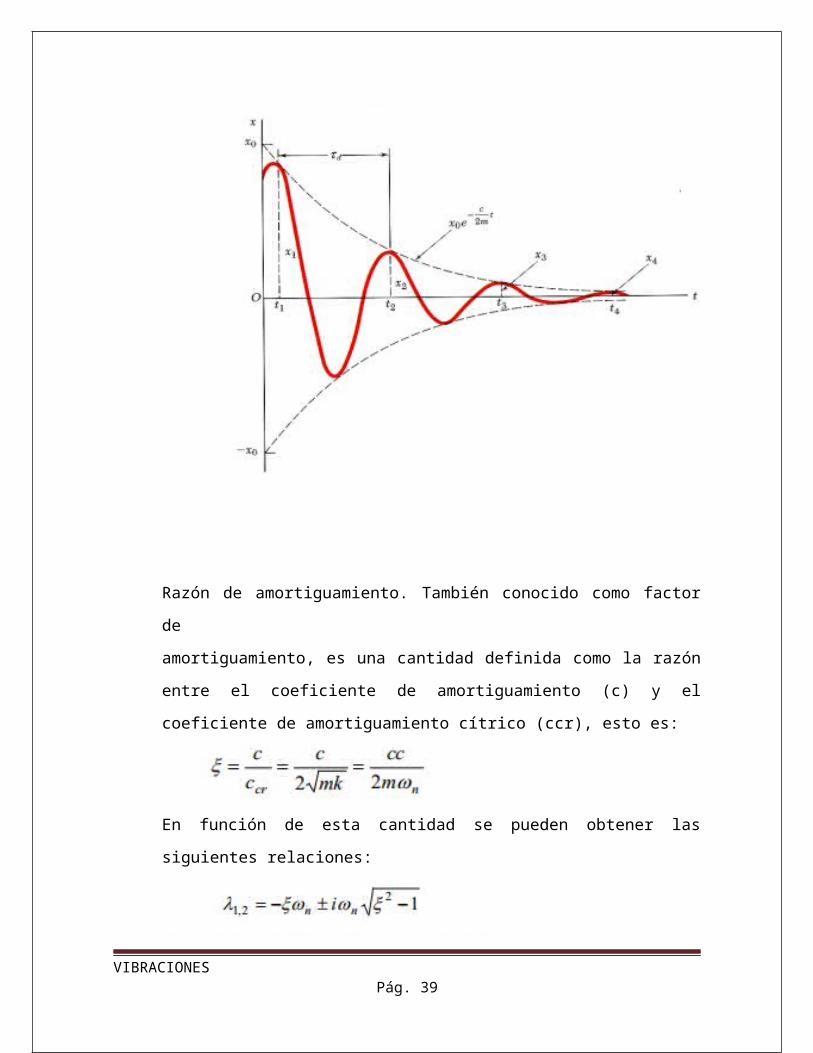
El movimiento de la ecuación (4) se dice que es periódico en el tiempo de
amplitud decreciente tal como se muestra en la figura . En donde se
observa que el “período” es el tiempo entre dos valles o picos
VIBRACIONES Pág. 30
Razón de amortiguamiento. También conocido como factor de
amortiguamiento, es una cantidad definida como la razón entre el
coeficiente de amortiguamiento (c) y el coeficiente de amortiguamiento
cítrico (ccr), esto es:
En función de esta cantidad se pueden obtener las siguientes relaciones:
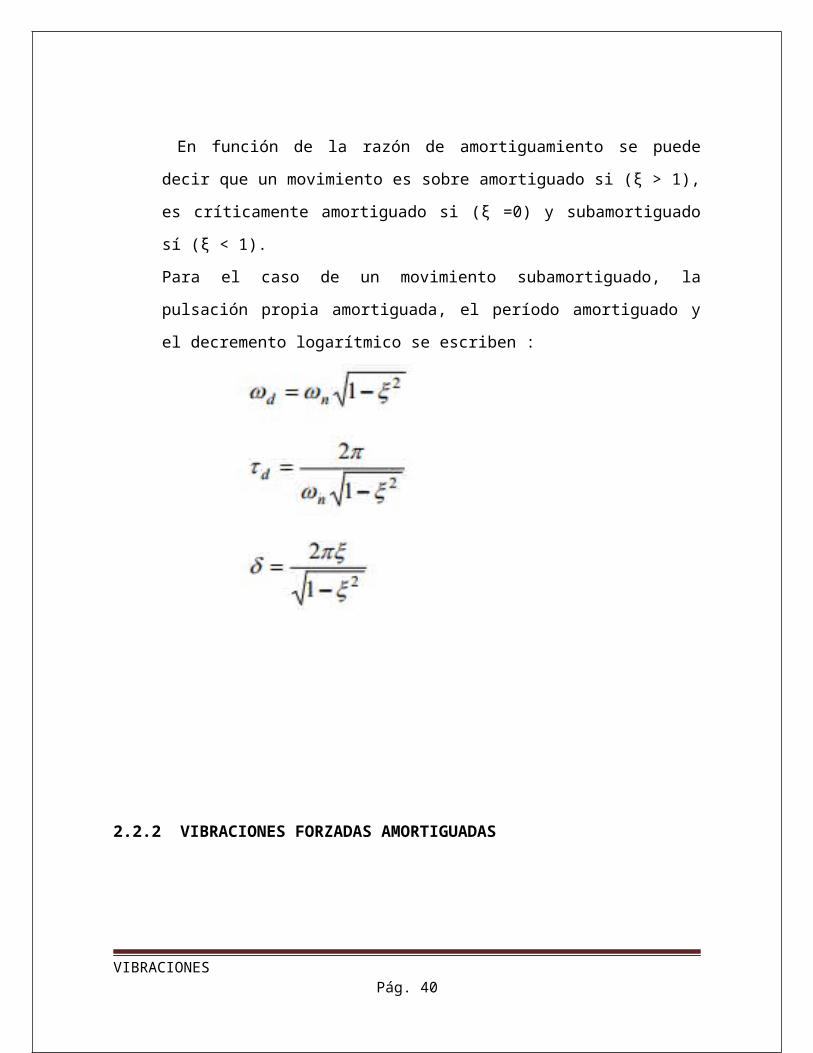
En función de la razón de amortiguamiento se puede decir que un
movimiento es sobre amortiguado si (ξ > 1), es críticamente amortiguado si
(ξ =0) y subamortiguado sí (ξ < 1).
VIBRACIONES Pág. 31
Para el caso de un movimiento subamortiguado, la pulsación propia
amortiguada, el período amortiguado y el decremento logarítmico se
escriben :
2.2.2 VIBRACIONES FORZADAS AMORTIGUADAS
Si el sistema considerado en la sección anterior está sujeto a una fuerza periódica
P de magnitud P = Pm sen wt, la ecuación de movimiento se transforma en:
m x+c x+kx=Pm senw f t
La solución general se obtiene sumando una solución particular a la función
complementaria: m x+c x+kx=0
La función complementaria está dada por los tres casos vistos anteriormente; el
interés está centrado en la vibración estacionaria representada por la solución
particular:
X part=xm sen (wt−φ )
VIBRACIONES Pág. 32
Después de varios cálculos:
tanφ=Cw /(k−mw2 )
X m=Pm
√(k−mw f2 )2+(c w f )
2
Recordando que p2 = k / m, donde p es la frecuencia circular de la vibración libre no amortiguada y de Cc = 2 mp, escribimos:
VIBRACIONES Pág. 33
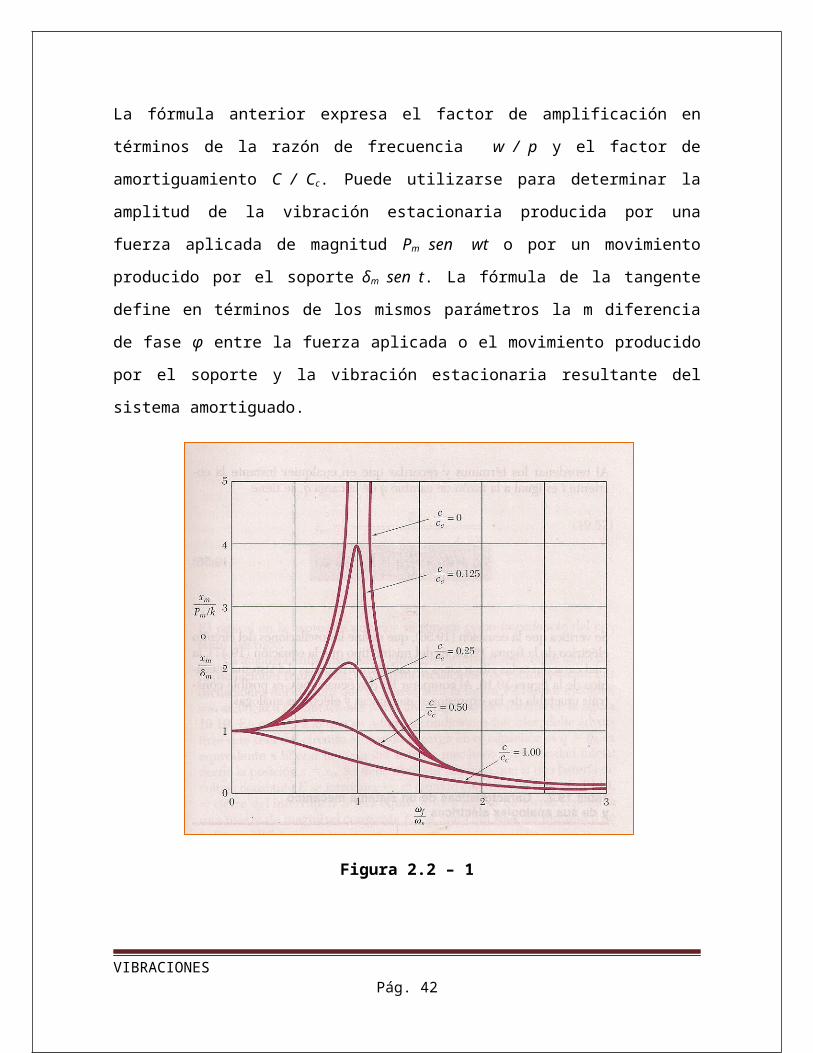
La fórmula anterior expresa el factor de amplificación en términos de la razón de
frecuencia w / p y el factor de amortiguamiento C / Cc. Puede utilizarse para
determinar la amplitud de la vibración estacionaria producida por una fuerza
aplicada de magnitud Pm sen wt o por un movimiento producido por el soporte δm
sen t. La fórmula de la tangente define en términos de los mismos parámetros la m
diferencia de fase φ entre la fuerza aplicada o el movimiento producido por el
soporte y la vibración estacionaria resultante del sistema amortiguado.
Figura 2.2 – 1
VIBRACIONES Pág. 34

3 . Aplicaciones de las vibraciones en la Ingenieria Civil
El estudio de las vibraciones es importante dentro de la Ingeniería Civil porque es una forma de describir el comportamiento de las estructuras ante algunas cargas ambientales. Estas cargas ambientales son principalmente las que el sismo ocasiona en las estructuras.
Vibraciones en sistemas estructurales:
Las estructuras, sean éstas los muros de mampostería de una vivienda, los pórticos de un edificio en altura o los tableros y pilas de un puente, son sistemas cuyo objetivo es garantizar la realización de la actividad que se desarrolla en la misma, resistiendo cargas propias y externas como el peso, el empuje del viento o las acciones producidas por terremotos. Nos referimos a éstas últimas como cargas o acciones dinámicas porque éstas varían relativamente rápidamente en el tiempo y como consecuencia, producen movimientos oscilatorios en las estructuras. Estos movimientos comúnmente se denominan vibraciones. Probablemente, el movimiento vertical de un vehículo sobre una calzada rugosa es nuestra experiencia más frecuente de un fenómeno vibratorio.
En ingeniería civil por ejemplo, una estructura vibra a cierta frecuencia natural (todos los materiales vibran). Si coincide con la frecuencia del viento, por ejemplo, entra en resonancia y se destruye literalmente. Un ejemplo es el puente llamado Takoma Narrow , que colapsó por resonancia (se movía como si fuera de goma literalmente) otro ejemplo de puente es el del millenium bridge, que vibraba mucho apenas inaugurado (cuando la gente caminaba por encima), hubo que repararlo.
Las características principales de un sistema vibratorio son su período de vibración, tiempo que tarda el sistema en realizar una oscilación completa cuando el sistema vibra libremente y su coeficiente de amortiguamiento, una medida de la velocidad de reducción de la amplitud del movimiento que se produce en ausencia de cargas externas.
El movimiento o vibración de una estructura de ingeniería civil puede resultar perjudicial e incluso riesgoso para la vida humana y en la mayoría de los casos, algo que atenta contra el confort de los ocupantes.
En ingeniería civil por ejemplo, una estructura vibra a cierta frecuencia natural (todos los materiales vibran). Si coinciude con la frecuencia del viento, por ejemplo, entra en resonancia y se destruye literalmente. Un ejemplo es el puente llamado Takoma Narrow , que colapsó por resonancia (se movía como si fuera de
VIBRACIONES Pág. 35

goma literalmente) otro ejemplo de puente es el del millenium bridge, que vibraba mucho apenas inaugurado (cuando la gente caminaba por encima), hubo que repararlo. Tomemos por ejemplo la situación de una estructura sometida a movimiento de su fundación durante un temblor o sismo. El movimiento del suelo producido por la
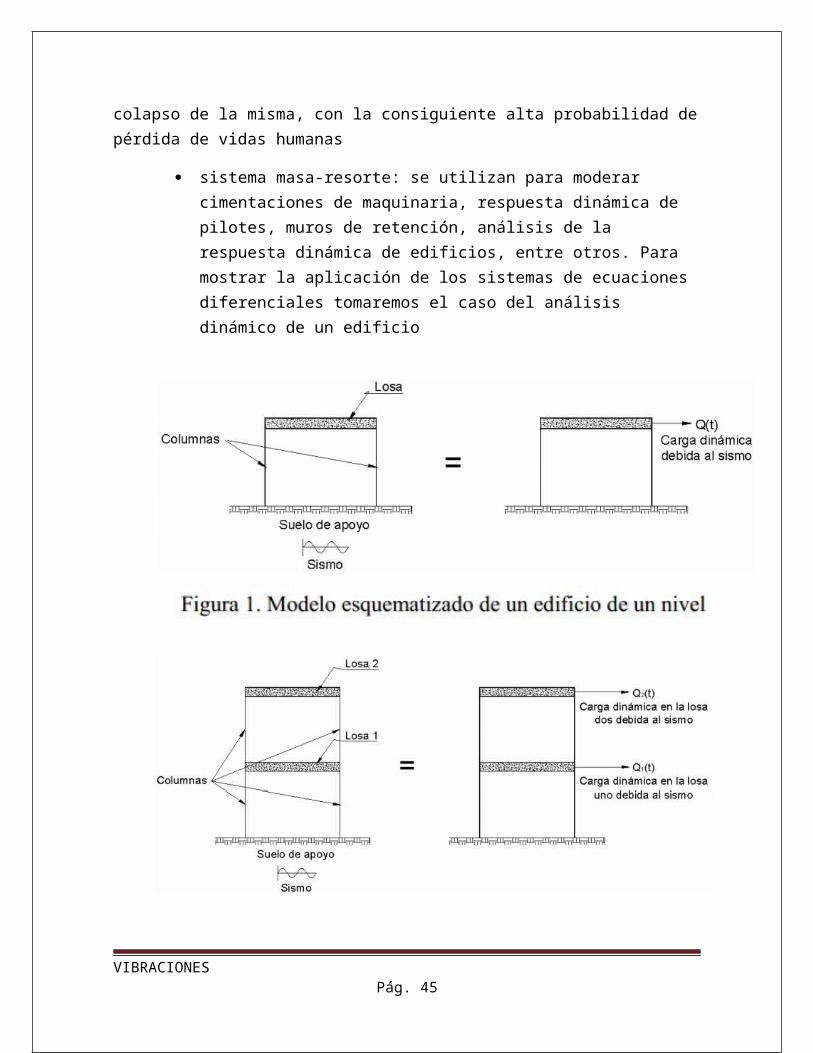
liberación de energía del terremoto impone movimientos en la fundación de un edificio, los que a su vez producen deformaciones en el mismo. Estas pueden producir daños en el sistema estructural, daños en elementos no estructurales como ventanas, muros de cerramiento, instalaciones de agua, gas u otros servicios, pérdida de funcionalidad e incluso el colapso de la misma, con la consiguiente alta probabilidad de pérdida de vidas humanas
sistema masa-resorte: se utilizan para moderar cimentaciones de maquinaria, respuesta dinámica de pilotes, muros de retención, análisis de la respuesta dinámica de edificios, entre otros. Para mostrar la aplicación de los sistemas de ecuaciones diferenciales tomaremos el caso del análisis dinámico de un edificio
VIBRACIONES Pág. 36
Nuevos sistemas de protección de estructuras sometidas a vibraciones es la siguiente: I. Aislamiento sísmico, II. Disipadores de energía o amortuguadores, III. Sistema activos de reducción de vibraciones
compactación por vibración:Algunos suelos granulares se pueden compactar fácilmente mediante vibraciones. Los edificios que descansan sobre tales suelos pueden sufrir asentamientos importantes, debido a la vibración de la maquinaria que se instale en ellos, tales como grandes compresores y turbinas. Los efectos de la vibración pueden ser muy graves, cuando la frecuencia de la vibración coincide con la frecuencia natural del terreno. Al advertir que las vibraciones pueden causar asentamientos perjudiciales en una estructura particular,, el ingeniero puede elegir entre varios métodos para evitarlas. Puede aumentar la masa de la cimentación, variando así su frecuencia, o compactar e inyectar el suelo, alterando de este modo su frecuencia natural y/o su compresibilidad.Existen rodillos vibratorios,maquinaria que compactan el relleno.
VIBRACIONES Pág. 37

VIBRACIONES Pág. 38
4 . EJERCICIOS APLICATIVOS
1. Una viga de acero puesta en voladizo tiene una longitud de 10 pulgadas y una
sección transversal cuadrada de 14
x 14
pul. Una masa de 10 lb se ata al extremo
libre de la viga, como se muestra en a figura 1-11.
Determine la frecuencia natural del sistema. Si la masa se desplaza ligeramente y luego se deja en libertad.
Suponer que la masa de la viga es pequeña, de a resistencia de materiales, la deflexión en el extremo libre de la viga en voladizo debida a la masa m es Ȣ=PL 1/3 EI.
El momento de inercia de la viga es I=b3.
h12
=1/3072 pul4 y el método de
elasticidad del acero es E=30(10)n lb/pul2.
La ecuación de movimiento para la vibración libre sin amortiguamiento es mẍ +kx =0, y
ωn=√ km=√3(30)¿¿¿
VIBRACIONES Pág. 39
2. Una viga simplemente apoyada con una carga concentrada que actúa en su punto medio, se muestra en la figura 1-9. Si la masa de la viga es despreciable comparada con la masa que actúa, encuentre la frecuencia natural del sistema.
De la resistencia de materiales, la flexión en el punto medio de una viga simplemente apoyada, debido a la carga concentrada P en el centro de la viga, está dada por Ȣ=PL1/48EI, donde E e I tienen los significados usuales.
Para deflexiones pequeñas, k=P/ Ȣ = 48 EI/L3; por tanto la ecuación de movimiento para esta vibración libre sin amortiguamiento es:
mẍ +kx =0
ωn=√ km=√48 EI /mL3 rad /seg
VIBRACIONES Pág. 40
3. El instrumento que se muestra en la figura esta rígidamente montado en una plataforma P,la cual a su vez esta sostenida por cuatro resorte, cada uno con una rigidez K=800 N/m.Si el piso se somete a un desplazamiento vertical δ =10 sen(8t)mm,de donde t esta en segundos. Determine:
a) la amplitud de la vibración de estado continuo.b) ¿Cuál es la frecuencia de la vibración del piso requerida para
provocar resonancia?. El instrumento y la plataforma tienen una masa total de 20 kg.
VIBRACIONES Pág. 41
Solución:
La frecuencia natural es:
ω=√ Km=√ 4( 800Nm )
20kg
=12.65 rad/s
La amplitud de la vibracion de estado continuo se determina con la siguiente ecuacion:
Al reemplezar kδ 0 en F0:
x¿
δ0
1−(ω0
ωn
)2=
10
1−( 8 rad /s12rad /s
)2=16.7mm Rpta
Ocurrira resonancia cuando la aomplitud de vibracion X provocada por el desplzamiento del piso tienda a infinito.Esto requiere.ω0=ωn=12.65 rad/s Rpta
VIBRACIONES Pág. 42
4. El motor eléctrico de 30 kg que se ilustra en la figura esta sostenido por cuatro resortes,cada uno con una rigidez de 200 N/m.Si el rotor se desbalancea de modo que su efecto equivalga a una masa de 4 kg situada a 60mm del eje de rotacion,determine:
a) la amplitud de la vibracion cuando el rotor gira a ω0=10 rad/s.El
factor de amortiguacion es c/cc=0.15.
VIBRACIONES Pág. 43
Solución:La fuerza periodica que hace que el motor vibre es la fuerza centrifuga a consecuencia del rotor desbalanceado.Esta fuerza tiene una magnitud constante de:
F0=man=mrω02=4kg(0.06)(10 rad / s2)=24N
Como F=F0 senω0t , dondeω0=10 rad/s,entonces :F=24 sen10 tLa rigidez de todo el sistema de cuatro resortes es k =4(200N/m)K=800N/mPor consiguiente,la frecuencia natural de vibración es:
ωn=√ km =√ 800N /m30kg
=5.164 rad/s
Como se reconoce el factor de amortiguación,la amplitud de estados continuio se determina con la siguiente ecuación:
X’=F0/k
√¿¿¿¿
X’=24/800√¿¿¿¿
X’=0.0107m=10.7mm Rpta
VIBRACIONES Pág. 44
5. Un edificio de masa m esta soportado uniformemente por cuatro resortes, cada uno con una rigidez k determine el periodo natural de vibración vertical
T+v=const .
T=12m¿
v=mgy+ 12(4 k )¿
T+v=12m¿
m y ' y ' '+mg y '−4k (∆ s− y ) y'=0
m y ' '+mg+4 ky−4k ∆ s=0
∆ s=ms4k
m y ' '+4 ky=0
y ' '+ 4 km
y=0
wn=√ 4 kmT=2π
wn=π √mk
6. La viga esta soportada en sus extremos mediante dos resortes A y B cada uno con la misma rigidez k. cuando la viga no tiene carga, presenta un periodo de vibración vertical de 0.83s, si se coloca una masa de 50kg en su
VIBRACIONES Pág. 45
centro, el periodo de vibración vertical es de 1.52s. calcule la rigidez de cada resorte y la masa de la viga.
T=2π √ mkT2
(2 π)2=mk→¿¿
¿¿
(1 ) en (2 )
mB=0.03490k
mB+50=0.1170k
mB=21.2kg
k=609 Nm
VIBRACIONES Pág. 46
Conclusiones
Las vibraciones mecánicas pueden clasificarse desde diferentes puntos de vistas
dependiendo de: a) la excitación, b) la disipación de energía, c) la linealidad de los
elementos y las características de la señal.
Dependiendo de la excitación
Vibración Forzada
Vibración libre
Una Vibración libre es cuando un sistema vibra debido a una excitación del tipo
instantánea, mientras que la vibración forzada se debe a una excitación del tipo
permanente.
Esta importante clasificación nos dice que un sistema vibra libremente si solo
existen condiciones iniciales del movimiento, ya sea que suministremos la energía
por medio de un impulso (energía cinética) o debido a que posee energía
potencial, por ejemplo deformación inicial de un resorte.Dependiendo de la
disipación de energía
No amortiguada
Amortiguada
El amortiguamiento es un sinónimo de la perdida de energía de sistemas
vibratorios y se manifiesta con la disminución del desplazamiento de vibración.
Este hecho puede aparecer como parte del comportamiento interno de un material
por ejemplo la fricción, o bien, o como un elemento físico llamado precisamente
VIBRACIONES Pág. 47

amortiguador. Por lo tanto, la vibración amortiguada es aquella en la que la
frecuencia de oscilación de un sistema se ve afectada por la disipación de la
energía, pero cuando la disipación de energía no afecta considerablemente a la
frecuencia de oscilación entonces la vibración es del tipo no amortiguada.
Bibliografía
Mecánica Vectorial para Ingenieros “DINÁMICA” 7ª Edición E. Russell Johnston,
Jr.
Ingeniería Mecánica DINÁMICA 2ª Edición William F. Riley and Leroy D. Sturges
http://fisica2ficunasam.zonalibre.org/CAPITULO%20II%20VIBRACIONES
%20%20%20MECANICAS%2029%20de%20mayo%202008.pdf
http://www.sc.ehu.es/sbweb/fisica/dinamica/trabajo/energia/energia.htm
VIBRACIONES Pág. 48





![Analisis de Vibraciones Mecanicas[1]](https://img.pdfslide.net/doc/110x75/55721414497959fc0b93b8fd/analisis-de-vibraciones-mecanicas1.jpg)





















![Vibraciones unidad 1 c [autoguardado]](https://img.pdfslide.net/doc/110x75/5884a7b61a28ab76798b50bd/vibraciones-unidad-1-c-autoguardado.jpg)