Embed Size (px)
Citation preview
Integracija funkcijavise promenljivih
Dragan S. Djordjevic
Univerzitet u Nisu, Prirodno-matematicki fakultetNis, Srbija
February 18, 2016

ii
Predgovor
Predavanja su namenjena studentima, koji polazu ispit iz predmeta Mate-maticka analiza 4.
Tekst nije kompletan, i konstantno se radi na poboljsanju materijalanamenjenog studentima (obratiti paznju na datum upisan na prvoj strani).Studenti su u obavezi da konsultuju dodatnu literaturu, koja je navedena uspisku referenci. Obavezno posetiti bilioteku Fakulteta.
Celine koje nije neophodno nauciti, pocinju simbolom ⋆, a zavrsavajusimbolom .
iii

iv
Sadrzaj
Predgovor iii
1 Prostor Rn 1
1.1 Vektorski prostor Rn . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Skalarni proizvod . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Norma u prostoru Rn . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Metricki prostori . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Integracija 15
2.1 Zordanova mera u Rn . . . . . . . . . . . . . . . . . . . . . . 15
2.1.1 Mera pravougaonika u R2 . . . . . . . . . . . . . . . . 15
2.1.2 Mera n-intervala u Rn . . . . . . . . . . . . . . . . . . 17
2.1.3 Unutrasnja i spoljna mera . . . . . . . . . . . . . . . . 18
2.2 Rimanov integral . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2.1 Rimanova suma . . . . . . . . . . . . . . . . . . . . . . 20
2.2.2 Darbuove sume . . . . . . . . . . . . . . . . . . . . . . 22
2.2.3 Oznake i terminologija . . . . . . . . . . . . . . . . . . 26
2.3 Klase integrabilnih funkcija . . . . . . . . . . . . . . . . . . . 27
2.4 Svojstva Rimanovog integrala . . . . . . . . . . . . . . . . . . 28
2.5 Geometrijski i fizicki smisao integrala . . . . . . . . . . . . . . 33
2.5.1 Interpretacija dvostrukog integrala . . . . . . . . . . . 35
2.5.2 Interpretacija trostrukog integrala . . . . . . . . . . . 36
2.6 Specificnosti integrala u Rn za n ≥ 2 . . . . . . . . . . . . . . 36
2.7 Izracunavanje integrala . . . . . . . . . . . . . . . . . . . . . . 38
2.7.1 Slucaj prostora R2 . . . . . . . . . . . . . . . . . . . . 38
2.7.2 Slucaj prostora Rn, n ≥ 3 . . . . . . . . . . . . . . . . 43
2.8 Smena promenljivih . . . . . . . . . . . . . . . . . . . . . . . 45
2.8.1 Polarna smena u ravni . . . . . . . . . . . . . . . . . . 49
2.8.2 Uopstena polarna smena . . . . . . . . . . . . . . . . . 52
v
vi SADRZAJ
2.8.3 Cilindricna smena u trostrukom integralu . . . . . . . 542.8.4 Sferna smena u trostrukom integralu . . . . . . . . . . 59
2.9 Nesvojstveni integrali . . . . . . . . . . . . . . . . . . . . . . 602.10 Pojmovi u mehanici . . . . . . . . . . . . . . . . . . . . . . . 62
2.10.1 Moment inercije materijalne ravne figure . . . . . . . . 632.10.2 Elipsa inercije . . . . . . . . . . . . . . . . . . . . . . . 642.10.3 Moment inercije materijalne figure . . . . . . . . . . . 662.10.4 Teziste materijalne ravne figure . . . . . . . . . . . . . 672.10.5 Teziste materijalne figure u prostoru . . . . . . . . . . 68
3 Krivolinijski integrali 713.1 Krive u Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . 713.2 Krivolinijski integral prvog reda . . . . . . . . . . . . . . . . . 79
3.2.1 Rimanova suma i geometrijska interpretacijakrivolinijskog integrala prvog reda . . . . . . . . . . . 83
3.3 Krivolinijski integral drugog reda . . . . . . . . . . . . . . . . 883.4 Grinova formula u ravni . . . . . . . . . . . . . . . . . . . . . 93
3.4.1 Slucaj visestruko povezanih oblasti . . . . . . . . . . . 973.4.2 Primena krivolinijskog integrala drugog reda na izra-
cunavane povrsine skupa u ravni . . . . . . . . . . . . 983.5 Nezavisnost integrala od putanje integracije . . . . . . . . . . 1013.6 Mehanicki smisao krivolinijskog integrala . . . . . . . . . . . 103
4 Povrsinski integrali 1054.1 Povrsi u R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1054.2 Prva kvadratna forma povrsi i povrsina povrsi . . . . . . . . 1094.3 Povrsinski integrali prvog reda . . . . . . . . . . . . . . . . . 1134.4 Povrsinski integrali drugog reda . . . . . . . . . . . . . . . . . 1154.5 Teorija polja . . . . . . . . . . . . . . . . . . . . . . . . . . . 1204.6 Formula Gaus–Ostrogradskog . . . . . . . . . . . . . . . . . . 1224.7 Formula Stoksa . . . . . . . . . . . . . . . . . . . . . . . . . . 128
5 Parametarski integrali 1355.1 Funkcija gornje granice . . . . . . . . . . . . . . . . . . . . . . 1355.2 Svojstveni parametarski integrali . . . . . . . . . . . . . . . . 1365.3 Nesvojstveni parametarski integrali . . . . . . . . . . . . . . . 1425.4 Gama funkcija (Ojlerov integral drugog reda) . . . . . . . . . 1525.5 Beta funkcija (Ojlerov integral prvog reda) . . . . . . . . . . 154
Literatura 159

Glava 1
Prostor Rn
1.1 Vektorski prostor Rn
Skup realnih brojeva oznavacavamo sa R, a skup prirodnih brojeva oznacavamosa N. Ako je n ∈ N, onda je
Rn = R× · · · × R︸ ︷︷ ︸n puta
= x = (x1, . . . , xn) : x1, . . . , xn ∈ R.
Skup Rn je veoma vazan u daljim razmatranjima, te cemo opisacemo njegovaalgebarska i metricka svojstva.
Podsecamo na definiciju Abelove1 (komutativne) grupe i polja.
Definicija 1.1.1. Neka je ∗ binarna operacija na nepraznom skupu G,odnosno ∗ : G × G → G. Ako je x, y ∈ G, pise se cesce x ∗ y umesto∗(x, y). Pretpostavimo da vaze sledeca svojstva:
(1) (∀x, y, z ∈ G) x ∗ (y ∗ z) = (x ∗ y) ∗ z (asocijativnost);(2) (∃e ∈ G)(∀x ∈ G) x ∗ e = e ∗ x = x (postojanje neutralnog elementa
e );(3) (∀x ∈ G)(∃x1 ∈ G) x∗x1 = x1∗x = e (postojanje inverznog elementa
x1 za x );(4) (∀x, y ∈ G) x ∗ y = y ∗ x (komutativnost).
Tada je (G, ∗) Abelova (komutativna) grupa, ili krace G je Abelova grupa(u odnosu na ∗). Elemenat e je neutralni elemenat za operaciju ∗, a x1 jeinverzni elemenat za x ∈ G.
Ako je skupGAbelova grupa, i pri tome je razmatrana operacija oznacenasa +, tada je tradicionalno neutralni elemenat u odnosu na operaciju +
1Niels Henrik Abel (1802-1829), norveski matematicar
1

2 GLAVA 1. PROSTOR RN
oznacen sa 0. Ako je x ∈ G, onda je suprotan elemenat od x u odnosu naoperaciju + oznacen sa −x. Ova konvencija se naziva aditivna notacija.
U mnogim slucajevima je prirodno sa · oznaciti operaciju na Abelovojgrupi G. Tada je neutralni elemenat u odnosu na operaciju · oznacen sa 1.Ako je x ∈ G, tada je suprotan elemenat od x u odnosu na · oznacen sa x−1.
Definicija 1.1.2. Neka su na skupu F definisane operacije + i ·, tako davaze sledeca svojstva:
(1) (F,+) je Abelova grupa;
(2) (F \ 0) je polje;
(3) (∀x, y, z ∈ F) x · (y+ z) = (x · y) + (x · z) (distributivnost operacije ·u odnosu na operaciju +).
Tada je F polje u odnosu na navedene operacije.
Skup R je polje u odnosu na standardne operacije + i ·. Takode, skupkompleksnih brojeva C je polje u odnosu na uobicajene operacije.
Definicija 1.1.3. Neka je V neprazan skup na kome je definisana binarnaoperacija +, tako da je (V,+) Abelova grupa. Oznacimo sa 0 neutralnielemenat ove Abelove grupe. Neka je F skup realnih ili kompleksnih brojeva.
Neka je, osim toga, definisana funkcija p : F× V → V , u kracem zapisup(λ, x) = λx za λ ∈ F i x ∈ V , koja ispunjava osobine:
(1) (∀λ, µ ∈ F)(∀x ∈ V ) (λ+ µ)x = λx+ µx;
(2) (∀λ ∈ F)(∀x, y ∈ V ) λ(x+ y) = λx+ λy;
(3) (∀λ, µ ∈ F)(∀x ∈ V ) (λµ)x = λ(µx);
(4) (∀x ∈ V ) 1x = x.
Tada je V vektorski prostor nad poljem F. Elementi vektorskog pros-tora jesu vektori, a elementi polja F jesu skalari. Operacija + u skupuV jeste sabiranje vektora. Neutralni elemenat 0 u skupu V u odnosu naovu operaciju jeste nula vektor. Operacije + i · u skupu F jesu sabiranje imnozenje skalara. Funkcija p(λ, x) = λx jeste mnozenje vektora skalarom.
Vektorski prostor nad poljem R naziva se realan vektorski prostor. Vek-torski prostor nad poljem C je kompleksan vektorski prostor.
Nije tesko dokazati sledece tvrdenje.
Teorema 1.1.1. Ako je V vektorski prostor nad poljem F, tada vazi:
(1) (∀x ∈ V ) 0x = 0;
(2) (∀λ ∈ F) λ0 = 0;
(3) (∀x ∈ V ) (−1)x = −x, gde je −x inverzni za x u odnosu na + u V .
1.1. VEKTORSKI PROSTOR RN 3
Neka je x = (x1, . . . , xn), y = (y1, . . . , yn) ∈ Rn. Sabiranje je definisanokoordinatno, odnosno
x+ y = (x1 + y1, . . . , xn + yn).
U odnosu na ovako definisanu operaciju + skup Rn je Abelova grupa, pricemu je nula-vektor 0 = (0, . . . , 0), a inverzni elemenat od x je −x =(−x1, . . . ,−xn).
Mnozenje skalarom je takode definisano koordinatno. Ako je λ ∈ R, tadaje
λx = (λx1, . . . , λxn).
Teorema 1.1.2. Skup Rn je vektorski prostor nad poljem R.
Moguce je svaki vektor x = (x1, . . . , xn) ∈ Rn poistovetiti sa tackom cijesu koordinate upravo date kao n-torka (x1, . . . , xn). U tom slucaju vektorx interpretiramo kao vektor sa ”pocetkom“ u 0 = (0, · · · , 0) i ”krajem“ u(x1, . . . , xn). Upravo opisana procedura jeste prelaz sa vektorskog prostoraRn na afini prostor Rn. Smatramo da je procedura jasna, te cemo o skupuRn ravnopravno govoriti kao o vektorskom prostoru (skupu vektora), i oafinom prostoru (skupu tacaka).
U slucaju n = 2 ili n = 3, jednostavna je geometrijska interpretacijaprostora Rn.
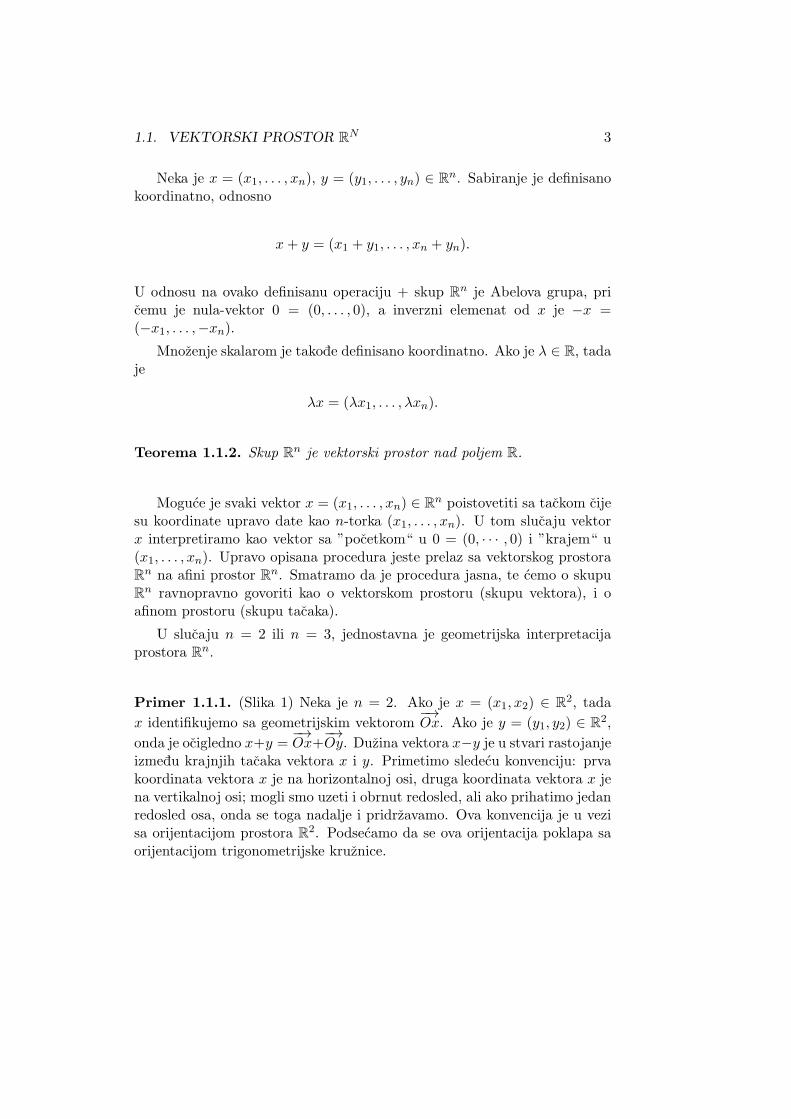
Primer 1.1.1. (Slika 1) Neka je n = 2. Ako je x = (x1, x2) ∈ R2, tada
x identifikujemo sa geometrijskim vektorom−→Ox. Ako je y = (y1, y2) ∈ R2,
onda je ocigledno x+y =−→Ox+
−→Oy. Duzina vektora x−y je u stvari rastojanje
izmedu krajnjih tacaka vektora x i y. Primetimo sledecu konvenciju: prvakoordinata vektora x je na horizontalnoj osi, druga koordinata vektora x jena vertikalnoj osi; mogli smo uzeti i obrnut redosled, ali ako prihatimo jedanredosled osa, onda se toga nadalje i pridrzavamo. Ova konvencija je u vezisa orijentacijom prostora R2. Podsecamo da se ova orijentacija poklapa saorijentacijom trigonometrijske kruznice.
4 GLAVA 1. PROSTOR RN
Slika 1.
Slika 2.
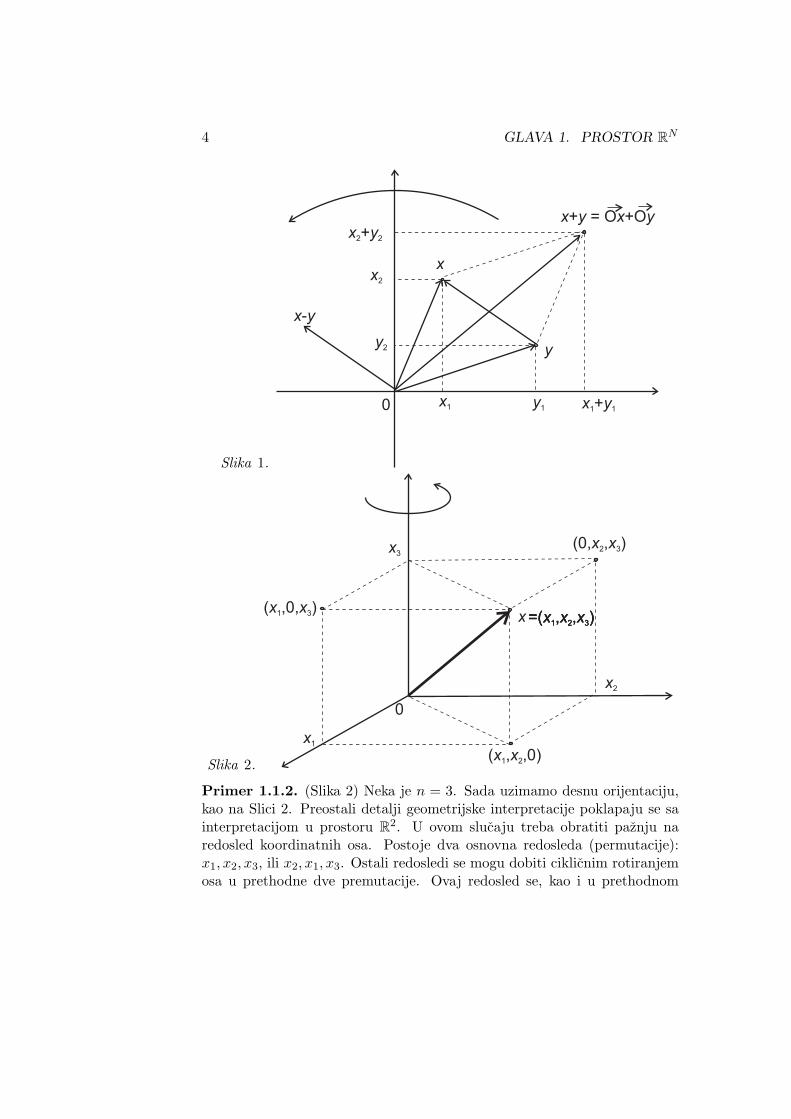
Primer 1.1.2. (Slika 2) Neka je n = 3. Sada uzimamo desnu orijentaciju,kao na Slici 2. Preostali detalji geometrijske interpretacije poklapaju se sainterpretacijom u prostoru R2. U ovom slucaju treba obratiti paznju naredosled koordinatnih osa. Postoje dva osnovna redosleda (permutacije):x1, x2, x3, ili x2, x1, x3. Ostali redosledi se mogu dobiti ciklicnim rotiranjemosa u prethodne dve premutacije. Ovaj redosled se, kao i u prethodnom

1.2. SKALARNI PROIZVOD 5
primeru, odnosi na orijentaciju prostora R3. Koristicemo samo desnu ori-jentaciju.
Analogno prethodnom razmatranju, skup Cn je vektorski prostor nadpoljem C, a operacije su definisane na isti nacin kao u prostoru Rn.
Navodimo druge primere, koji nemaju geometrijsku interpretaciju.
Primer 1.1.3. Skup C[a, b] realnih neprekidnih funkcija na segmentu [a, b]je realan vektorski prostor. Za x, y ∈ C[a, b], λ ∈ R i t ∈ [a, b], sabiranjefunkcija i mnozenje skalarom definisno je uobicajeno:
(x⊕ y)(t) = x(t) + y(t), (λ⊙ x)(t) = λx(t).
1.2 Skalarni proizvod
Uvodimo pojam skalarnog proizvoda na realnim vektorskim prostorima.
Definicija 1.2.1. Neka je V vektorski prostor nad poljem realnih brojevaR. Neka preslikavanje s : V × V → R ima sledeca svojstva:
(1) (∀x ∈ V ) s(x, x) ≥ 0;
(2) (∀x ∈ V ) (s(x, x) = 0 ⇐⇒ x = 0);
(3) (∀λ, µ ∈ R)(∀x, y, z ∈ V ) s(λx+ µy, z) = λs(x, z) + µs(y, z);
(4) (∀x, y ∈ V ) s(x, y) = s(y, x).
Tada je funkcija s skalarni proizvod na vektorskom prostoru V .
Primer 1.2.1. Ako je x = (x1, . . . , xn) ∈ Rn i y = (y1, . . . , yn) ∈ Rn, tadaje njihov skalarni proizvod definisan na sledeci nacin:
⟨x, y⟩ =n∑i=1
xiyi.
Lako je proveriti sve osobine skalarnog proizvodad. Za n = 2, 3 nije teskoutvrditi da se ova definicija skalarnog proizvoda poklapa sa poznatom defini-cijim na skupu geometrijskih vektora u ravni ili prostoru.
Primer 1.2.2. U skupu C[a, b] skalarni prozivod se definise na sledeci nacin:
⟨f, g⟩ =∫ b
af(t)g(t)dt
za sve funkcije f, g ∈ C[a, b].

6 GLAVA 1. PROSTOR RN
Primer 1.2.3. Neka je p ∈ C[a, b] data nenegativna neprekidna funkcija.Opstiji skalarni proizvod u skupu C[a, b] definisan je na sledeci nacin:
⟨x, y⟩ =∫ b
af(t)g(t)p(t)dt,
za svako f, g ∈ C[a, b]. Ako je p(t) = 1 za svako t ∈ [a, b], onda upravouvedeni skalarni proizvod postaje odgovarajuci iz prethodnog primera.
Teorema 1.2.1. (Nejednakost Kosi-Svarza-Bunjakovskog) Neka je (V, s)unitaran prostor. Tada za svako x, y ∈ V vazi
|⟨x, y⟩| ≤ ⟨x, x⟩1/2⟨y, y⟩1/2.
Dokaz. Naka je x, y ∈ V . Za svako t ∈ R vazi:
0 ≤ ⟨x− ty, x− ty⟩ = ⟨x, x⟩ − 2t⟨x, y⟩+ t2⟨y, y⟩.
Sa desne strane je nenegativna kvadratna funkcija po t, te je diskriminantaove kvadratne funkcije manja ili jednaka od nule, odnosno
⟨x, y⟩2 ≤ ⟨x, x⟩⟨y, y⟩.
Odavde sledi tvrdenje.
1.3 Norma u prostoru Rn
Postoji vise normi u vektorskom prostoru. Navodimo definiciju proizvoljnenorme
Definicija 1.3.1. Neka je V vektorski prostor nad C ili nad R. Pret-postavimo da funkcija ∥ · ∥ : V → R ima svojstva:
(1) (∀x ∈ V ) ∥x∥ ≥ 0;
(2) (∀x ∈ V ) (∥x∥ = 0 ⇐⇒ x = 0);
(3) (∀x ∈ V )(∀λ ∈ C ( ili λ ∈ R) ) ∥λx∥ = |λ|∥x∥;(4) (∀x, y ∈ V ) ∥x+ y∥ ≤ ∥x∥+ ∥y∥ (nejednakost trougla).
Tada je ∥ · ∥ norma na V . Ureden par (V, ∥ · ∥) jeste normiran prostor, ilikrace V je normiran prostor.
Posebno je interesantna norma indukovana skalarnim proizvodom.

1.3. NORMA U PROSTORU RN 7
Teorema 1.3.1. Neka je V unitaran prostor, na kome je definisan skalarniproizvod ⟨·, ·⟩. Definisemo funkciju ∥ · ∥ na skupu V na sledeci nacin:
∥x∥ =√
⟨x, x⟩, x ∈ V.
Tada je ∥ · ∥ norma na unitarnom prostoru V .
Dokaz. Jedini problem je dokazati nejednakost trogla. Za proizvoljne x, y ∈V , na osnovu nejednakosti Kosi-Svarca-Bunjakovskog, vazi
∥x+ y∥2 = ⟨x+ y, x+ y⟩ = ⟨x, x⟩+ 2⟨x, y⟩+ ⟨y, y⟩ = (∥x∥+ ∥y∥)2.
Iz prethodne nejednakosti sledi nejednakost trougla za normu definisanuskalarnim proizvodom.
Primer 1.3.1. (Euklidkska norma) Imajuci u vidu da je skalarni proizvodu Rn definisan kao
⟨x, y⟩ =b∑
j=1
xjyx, x = (x1, . . . , xn), y = (y1, . . . , yn) ∈ Rn,
proizilazi da je norma indukovana ovim skalarnim proizvodom odredena kao
∥x∥ =
√√√√ n∑j=1
x2j .
Ova norma se naziva euklidska norma. Prostor Rn je euklidski prostor.
Primer 1.3.2. U prostoru Rn norma moze biti uvedena na sledece nacine:
∥x∥ = ∥x∥2 =
√√√√ n∑i=1
|xi|2, Euklidova norma
∥x∥1 =n∑i=1
|xi|, ∥x∥∞ = max1≤i≤n
|xi|
Euklidova norma jeste intenzitet geometrijskog vektora u slucaju n = 1, 2, 3.
Primer 1.3.3. U skupu C[a, b] norma moze biti definisana na sledeci nacin:
∥x∥ = maxt∈[a,b]
|x(t)|.

8 GLAVA 1. PROSTOR RN
Primer 1.3.4. Neka je dat skup C[a, b] sa ranije definisanim skalarnimproizvodom. Tada je norma funkcje f ∈ C[a, b] data sa
∥f∥ =
√∫ b
a|f(t)|2dt.
Norma, a samim tim i skalarni proizvod, na prirodan nacin odredujurastojanje u vektorskom prostoru.
Teorema 1.3.2. Ako je ∥ · ∥ norma na vektorskom prostoru V , onda jerastojanje na skupu V , koje je indukovano normom, definisano kao
d(x, y) = ∥x− y∥, x, y ∈ V.
1.4 Metricki prostori
Pojam rastojanja izmedu elemenata nekog skupa je veoma vazan u matem-atici. Stoga detaljno razmatramo ovo pitanje. U jednom skupu se na visenacina moze definisati rastojanje.
Definicija 1.4.1. Neka je X proizvoljan neprazan skup, i neka je d : X ×X → R preslikavanje, tako da za svako x, y, z ∈ X vazi
(1) d(x, y) ≥ 0;
(2) d(x, y) = d(y, x);
(3) d(x, y) = 0 ako i samo ako x = y;
(4) d(x, y) ≤ d(x, z) + d(z, y) (nejednakost trougla).
Tada je d metrika, ili rastojanje na skupu X. Ureden par (X, ρ) jestemetricki prostor.
Jednostavnije, X je metricki prostor, i podrazumevamo da je na skupuX definisana neka metrika.
Elementi metrickog prostora nazivaju se tacke. Ako je x, y ∈ X, tada jebroj d(x, y) rastojanje izmedu tacaka x i y.
Primer 1.4.1. (a) Na skupu realnih brojeva R metrika je definisana nauobicajeni nacin: ako su x, y ∈ R, onda je d(x, y) = |x− y|.
(b) Neka je R2 = (x1, x2) : x1, x2 ∈ R skup svih uredenih parovarealnih brojeva, koji geometrijski interpretiramo kao ravan. Ako je x =(x1, x2) ∈ R2 i y = (y1, y2) ∈ R2, onda je njihovo Euklidovo rastojanjeodredeno sa
d(x,y) =√
(x1 − y1)2 + (x2 − y2)2.

1.4. METRICKI PROSTORI 9
(c) Slicno je i u trodimenzionalnom prostoru R3. Ako je x = (x1, x2, x3) ∈R3 i y = (y1, y2, y3) ∈ R3, tada je Euklidovo rastojanje izmedu ovih tacaka
d(x, y) =√
(x1 − y1)2 + (x2 − y2)2 + (x3 − y3)2.
(d) Neka je Rn = (x1, . . . , xn) : x1, . . . , xn ∈ R skup uredenih n-torkirealnih brojeva. Ako je x = (x1, . . . , xn) ∈ Rn i y = (y1, . . . , yn) ∈ Rn, ondaje Euklidovo rastojanje izmedu tacaka x i y definisano kao:
d(x, y) =
(n∑k=1
(xk − yk)2
)1/2
.
Dokaz. Svojstva (1), (2) i (3) iz Definicije 1.4.1 je jednostavno proveriti, dokje osobina (4) iste definicije posledica sledeceg tvrdenja:
Teorema 1.4.1. Ako su a1, . . . , an, b1, . . . bn proizvoljni realni brojevi, tadavazi (
n∑i=1
(ai + bi)2
)1/2
≤
(n∑i=1
a2i
)1/2
+
(n∑i=1
b2i
)1/2
.
Ako je ai = xi − zi, bi = zi − yi (i = 1, . . . , n) u prethodnoj Teoremi1.4.1, sledi da za x = (x1, . . . , xn), y = (y1, . . . , yn) i z = (z1, . . . , zn) vazi:
d(x, y) =
(n∑i=1
(xi − yi)2
)1/2
≤
(n∑i=1
(xi − zi)2
)1/2
+
(n∑i=1
(zi − yi)2
)1/2
d(x, z) + d(z, y),
Ovim je dokazana nejednakost trougla za funkciju d .
Definicija 1.4.2. Prostor Rn sa rastojanjem iz Primera 1.4.1 naziva seEuklidov prostor.
U skupu Rn mogu se definisati rastojanja i na neki drugi nacin, kao stopokazuju sledeci primeri.
Primer 1.4.2. (a) Neka je x = (x1, . . . , xn) i y = (y1, . . . , yn) ∈ Rn. Tadasu
d1(x,y) = maxi=1,n
|xi − yi|, d2(x, y) =n∑i=1
|xi − yi|
metrike na skupu Rn i vazi
d(x, y)
n≤ d1(x, y) ≤ d(x, y) ≤ d2(x,y) ≤ n · d1(x,y),

10 GLAVA 1. PROSTOR RN
gde je d Euklidovo rastojanje na Rn.(b) Neka jeB[0, 1] skup svih realnih funkcija koje su definisane i ogranicene
na segmentu [0, 1]. Za proizvoljne funkcije x, y ∈ B[0, 1], funkcija d∞ defin-isana je na sledeci nacin:
d∞(x, y) = supt∈[0,1]
|x(t)− y(t)|.
Ocigledno, funkcija d ispunjava uslove (1)–(3) Definicije 1.4.1. Neposrednoiz definicije funkcije d sledi:
|x(t)− y(t)| ≤ ρ(x, y) za svako t ∈ [0, 1].
Na osnovu nejednakosti trougla za realne brojeve, za proizvoljne funkcijex, y, z ∈ B[0, 1] i svako t ∈ [0, 1] vazi sledeca procena:
|x(t)− y(t)| ≤ |x(t)− z(t)|+ |z(t)− y(t)| ≤ d∞(x, z) + d∞(z, y).
Prema tome vazi
d∞(x, y) = supt∈[0,1]
|x(t)− y(t)| ≤ d∞(x, z) + d∞(z, y),
sto predstavlja nejednakost trougla za funkciju d∞. Tacke ovog metrickogprostora jesu ogranicene realne funkcije na skupu [0, 1].
(c) Neka je C[a, b] skup svih realnih funkcija, koje su definisane i neprekidnena segmentu [a, b]. Tada se u skupu C[a, b] metrika moze definisati na sledecinacin:
d∞(x, y) = maxt∈[a,b]
|x(t)− y(t)|,
za svako x, y ∈ C[a, b].
(d) Skup kompleksnih brojeva oznacen je sa C. Svaki broj z ∈ C pred-stavlja se kao z = x+ iy, gde su x i y realni brojevi, x = Re z i y = Im z, ai je imaginarna jedinica. Skup kompleksnih brojeva predstavljen je jednomravni, pri cemu vazi z = x+ iy = (x, y). Stoga je rastojanje u C definisanona isti nacin kao u prostoru R2. Ako je z = x + iy i w = u + iv, gde sux, y, u, v ∈ R, tada je
d(z, w) =√
(x− u)2 + (y − v)2.
Iz cinjenice da je modul kompleksnog broja z = x + iy definisan kao |z| =d(z, 0), sledi d(z, w) = |z − w|.

1.4. METRICKI PROSTORI 11
(e) U prostoru Cn uredenih n-torki kompleksnih brojeva definisana jemetrika na sledeci nacin. Ako je z = (z1, . . . , zn) ∈ Cn i w = (w1, . . . , wn) ∈Cn, pri cemu je zi, wi ∈ C za svako i = 1, . . . , n, tada je
d(z, w) =
(n∑i=1
|zi − wi|2)1/2
.
Sada podrazumevamo da je konvergencija nizova u skupu R dobro poz-nata. Na osnovu ovoga, definise se konvergencija nizova u proizvoljnommetrickom prostoru.
Definicija 1.4.3. Neka je (xn)n niz tacaka u metrickom prostoru X. Niz(xn)n konvergira ka tacki a ∈ X (u oznaci lim
n→∞xn = a), ako brojni niz
(d(xn, a))n konvergira ka 0, odnosno
(∀ϵ > 0)(∃n0 ∈ N)(∀n ∈ N)(n ≥ n0 =⇒ d(xn, a) < ϵ).
Drugim recima, limn→∞
xn = a ako i samo ako limn→∞
d(xn, a) = 0.
Ako je limn→∞
xn = a, tada je tacka a granicna vrednost niza (xn)n.
Ograniceni nizovi cine siru klasu od konvergentnih nizova u metrickomprostoru.
Definicija 1.4.4. Niz tacaka (xn)n metrickog prostora X je ogranicen, akopostoje a ∈ X i broj C > 0, tako da za svako n ∈ N vazi uslov d(xn, a) ≤ C.
Sledi nekoliko osnovnih tvrdenja koja se odnose na konvergentne i ogranicenenizove.
Teorema 1.4.2. Ako je niz (xn)n konvergentan u metrickom prostoru X,onda je on i ogranicen.
Dokaz. Neka je limn→∞
xn = a, odnosno limn→∞
d(xn, a) = 0. Niz (d(xn, a))n je
konvergentan niz realnih brojeva, te je ogranicen. Stoga postoji neki brojC > 0, tako da za svako n ∈ N vazi d(a, xn) ≤ C. Ovim je pokazanaogranicenost niza (xn)n u metrickom prostoru X.
Teorema 1.4.3. Niz (xn)n u metrickom prostoru X ne moze konvergiratidvema razlicitim tackama.
Dokaz. Neka je limn→∞
xn = a i limn→∞
xn = b. Na osnovu nejednakosti trougla
vazi0 ≤ d(a, b) ≤ d(a, xn) + d(xn, b).

12 GLAVA 1. PROSTOR RN
Obzirom da nizovi d(a, xn) i d(xn, b) teze ka 0 kada n → ∞, sledi da jed(a, b) = 0, odnosno a = b.
Otvorena kugla poluprecnika r (r > 0) sa centrom u tacki a metrickogprostora X jeste skup
B(a; r) = x ∈ X : d(x, a) < r.
Kugla sa centrom u a ∈ R poluprecnika r > 0 na realnoj pravoj jesteinterval (a− r, a+ r).
Ako je a = (a1, a2) ∈ R2, onda je
B(a; r) = x = (x1, x2) :√
(x1 − a1)2 + (x2 − a2)2 < r
krug sa centrom u tacki a poluprecnika r.
Kugla u R3 je kugla, ili lopta u uobicajenom smislu.
Koristeci pojam kugle u metrickom prostoru, moguce je dati jos jednukarakterizaciju konvergencije niza tacaka.
Teorema 1.4.4. Niz tacaka (xn)n metrickog prostora X konvergira ka tackia ∈ X, ako i samo ako svaka kugla B(a; r) sadrzi sve tacke niza (xn)n, osimeventualno konacno mnogo tacaka tog niza.
Dokaz. Neka je limn→∞
xn = a i neka je B(a; r) proizvoljna kugla. Za dati broj
r > 0 postoji n0 ∈ N, tako da za svako n ∈ N sa svojstvom n ≥ n0 vazid(xn, a) < r. Proizilazi da kugla B(a; r) sadrzi sve clanove niza (xn)n≥n0 .
Obrnuto, pretpostavimo da svaka kugla B(a; ϵ) sadrzi sve clanove niza(xn)n, osim eventualno neki konacan broj tacaka tog niza. Neka je ϵ > 0proizvoljan broj i xn1 tacka sa najvecim indeksom niza (xn)n koja ne pripadakugli B(a; ϵ). Sve ostale tacke moraju pripadati ovoj kugli, odnosno za svakiprirodan broj n, ako je n > n1, onda je d(xn, a) < ϵ. Sledi lim
n→∞xn = a.
Konvergencija niza tacaka prostora Rn ekvivalentna je konvergenciji svakogniza koordinata.
Teorema 1.4.5. Niz tacaka (xm)m prostora Rn, pri cemu je xm = (xm1 , . . . , xmn ),
konvergira ka tacki a = (a1, . . . , an), ako i samo ako svaki koordinatni niz(xmi )m konvergira ka tacki ai (i = 1, . . . , n).
Drugim recima, limm→∞
xm = a ako i samo ako je limm→∞
xmi = ai za svako
i = 1, . . . , n.
Dokaz. Dovoljno je dokazati tvrdenje u slucaju n = 2. U slucaju n ≥ 2tehnicke detalje dokaza prepustamo citaocu. Neka je lim
m→∞xm = a, gde je

1.4. METRICKI PROSTORI 13
xm = (xm1 , xm2 ) i a = (a1, a2). Tada je lim
m→∞d(xm, a) = 0. Vazi
0 ≤ |xm1 − a1| ≤√
(xm1 − a1)2 + (xm2 − a2)2 = d(xm, a) → 0, m→ ∞.
Ovim je pokazano limm→∞
xm1 = a1. Na potpuno isti nacin moze se dokazati
limm→∞
xm2 = a2.
Sa druge strane, pretpostavimo da vazi limm→∞
xm1 = a1 i limm→∞
xm2 = a2.
Tada je
d(xm, a) =√
(xm1 − a1)2 + (xm2 − a2)2 → 0 kada m→ ∞,
odakle sledi limm→∞
xm = a.
Neka je M podskup metrickog prostora X.Tacka x0 ∈ M je unutrasnja tacka skupa M , ako postoji neka kugla
B(x0; r) ⊂M . Skup svih unutrasnjih tacaka skupa M oznacen je sa intM ,ili M. Iz definicije skupa unutrasnjih tacaka sledi intM ⊂ M . Skup M jeotvoren ako je intM =M .
Otvorena kugla u metrickom prostoru je otvoren skup. Naravno, intervalje otvoren skup u R, otvoren krug je otvoren skup u R2, otvorena lopta jeotvoren skup u R3. Obzirom da je int[a, b] = (a, b), skup [a, b] nije otvoren.
Tacka x0 ∈ X je rubna tacka skupa M ⊂ X, ako svaka kugla B(x0; r)ima neprazan presek i sa skupom M i sa skupom X \M . Skup svih rubnihtacaka skupaM naziva se rub skupaM i oznacava sa ∂M , ili ∂M . Ociglednovazi intM ∩ ∂M = ∅.
Neka je a, b, c ∈ R, a < b < c i M = (a, b) ∪ c. Tada je ∂M = a, b, c.Rub kruga u ravni jeste kruznica. Rub lopte u prostoru jeste sfera.
Svaka tacka skupa M mora biti ili unutrasnja, ili rubna (nikada i jednoi drugo).
Tacka x0 ∈ X je tacka nagomilavanja skupa M ⊂ X, ako postoji nizrazlicitih tacaka (xn)n, xn ∈M , tako da je lim
n→∞xn = x0. Skup svih tacaka
nagomilavanja skupa M oznacen je sa accM , ili M ′. Sve tacke skupa Mkoje nisu tacke nagomilavanja skupaM , jesu izolovane tacke skupaM . Skupizolovanih tacaka skupa M oznacen je sa isoM . Ocigledno vazi isoM =M \ accM .
Neka je a, b, c ∈ R, a < b < c i M = (a, b) ∪ c. Tada je accM = [a, b],isoM = c.
Zatvorenje skupa M jeste skup clM =M ∪ accM . Cesto se zatvorenjeskupa M oznacava sa M . Skup M je zatvoren ako je M = clM , odnosnoako je accM ⊂M .
14 GLAVA 1. PROSTOR RN
Skup M = [a, b] ∪ c (a, b, c,∈ R, a < b < c) je zatvoren. Skup M1 =(a, b) ∪ c nije ni otvoren ni zatvoren. Skup M2 = (a, b) je otvoren u R.
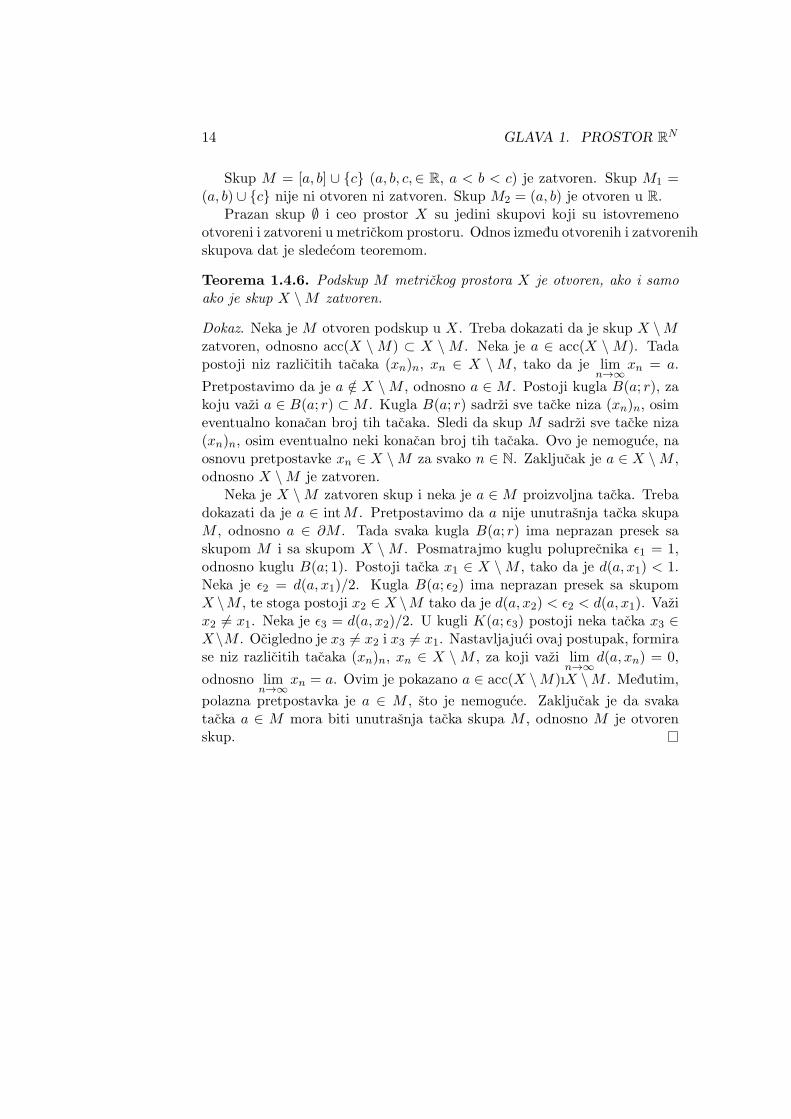
Prazan skup ∅ i ceo prostor X su jedini skupovi koji su istovremenootvoreni i zatvoreni u metrickom prostoru. Odnos izmedu otvorenih i zatvorenihskupova dat je sledecom teoremom.
Teorema 1.4.6. Podskup M metrickog prostora X je otvoren, ako i samoako je skup X \M zatvoren.
Dokaz. Neka je M otvoren podskup u X. Treba dokazati da je skup X \Mzatvoren, odnosno acc(X \M) ⊂ X \M . Neka je a ∈ acc(X \M). Tadapostoji niz razlicitih tacaka (xn)n, xn ∈ X \M , tako da je lim
n→∞xn = a.
Pretpostavimo da je a /∈ X \M , odnosno a ∈ M . Postoji kugla B(a; r), zakoju vazi a ∈ B(a; r) ⊂M . Kugla B(a; r) sadrzi sve tacke niza (xn)n, osimeventualno konacan broj tih tacaka. Sledi da skup M sadrzi sve tacke niza(xn)n, osim eventualno neki konacan broj tih tacaka. Ovo je nemoguce, naosnovu pretpostavke xn ∈ X \M za svako n ∈ N. Zakljucak je a ∈ X \M ,odnosno X \M je zatvoren.
Neka je X \M zatvoren skup i neka je a ∈ M proizvoljna tacka. Trebadokazati da je a ∈ intM . Pretpostavimo da a nije unutrasnja tacka skupaM , odnosno a ∈ ∂M . Tada svaka kugla B(a; r) ima neprazan presek saskupom M i sa skupom X \M . Posmatrajmo kuglu poluprecnika ϵ1 = 1,odnosno kuglu B(a; 1). Postoji tacka x1 ∈ X \M , tako da je d(a, x1) < 1.Neka je ϵ2 = d(a, x1)/2. Kugla B(a; ϵ2) ima neprazan presek sa skupomX \M , te stoga postoji x2 ∈ X \M tako da je d(a, x2) < ϵ2 < d(a, x1). Vazix2 = x1. Neka je ϵ3 = d(a, x2)/2. U kugli K(a; ϵ3) postoji neka tacka x3 ∈X\M . Ocigledno je x3 = x2 i x3 = x1. Nastavljajuci ovaj postupak, formirase niz razlicitih tacaka (xn)n, xn ∈ X \M , za koji vazi lim
n→∞d(a, xn) = 0,
odnosno limn→∞
xn = a. Ovim je pokazano a ∈ acc(X \M)ıX \M . Medutim,
polazna pretpostavka je a ∈ M , sto je nemoguce. Zakljucak je da svakatacka a ∈ M mora biti unutrasnja tacka skupa M , odnosno M je otvorenskup.
Glava 2
Integracija
2.1 Zordanova mera u Rn
U definiciji Rimanovog1 integrala funkcije jedne realne promenljive na seg-mentu sustinski je iskoriscen pojam duzine (mere) intervala. U skupu R2
pojmu mere odgovara pojam povrsine, a u skupu R3 pojmu mere odgovarapojam zapremine nekog skupa. Postoji vise razlicitih mera na prostoru Rn,a izucavacemo samo Zordanovu2.
Neka je a, b ∈ R, a < b. Duzina intervala I = (a, b) (ili bilo kog intervala[a, b), (a, b], [a, b]) jeste b−a. Dakle, jednodimenzionalna mera intervala I jem1(I) = b−a. Nebitno je da li krajnje tacke tacke a i b intervala I pripadajutom intervalu, ili ne. Time se prihvata cinjenica da je duzina tacke jednakanuli (tj. mera jednoelemetnog skupa jednaka je nuli).
2.1.1 Mera pravougaonika u R2
Neka su a, b, c, d ∈ R, tako da vazi a < b i c < d. Tada je ovim brojevimaodreden pravougaonik P u R2 sa koordinatama temena: A = (a, c), B =(b, c), C = (b, d) i D = (a, d) (Slika 3). Pravougaonik P izrazen prekoDekartovog3 proizvoda jeste P = (a, b) × (c, d). Mera ovog pravougaonika(povrsina, preciznije dvodimenzionalna mera) izracunava se na sledeci nacin
m2(P ) = (b− a)(d− c).
1Georg Friedrich Bernhard Riemann (1826-1866), nemacki matematicar2Marie Ennemond Camille Jordan (1838-1922), francuski matematicar3Rene Descartes (latinski: Renatus Cartesius; 1596-1650), francuski matematicar i
filozof
15

16 GLAVA 2. INTEGRACIJA
Broj 2 u simbolu m2 oznacava dimenzuju prostora, odnosno naglasava da seradi o prostoru R2. Nije vazno da li rubne stranice tog pravougaonika pri-padaju pravougaoniku, ili ne. Ovim se usvaja cinjenica da je dvodimenzion-alna mera duzi jednaka nuli. Specijalno, dvodimenzionalna mera tacke jed-naka je nuli. Dakle, ako je P1 = [a, b]× [c, d], onda je m2(P1) = (b−a)(d−c).Takode, ako je a = b i P2 = a × [c, d], onda je m2(P2) = 0.
Slika 3.
Neka su sada P1, . . . , Pn pravougaonici u R2, sa svojstvom da je Pi ∩ Pj(i = j) ili prazan skup, ili neki deo rubova ovih pravougaonika. Drugimrecima, Pi i Pj nemaju zajednickih unutrasnjih tacaka. Prirodno je sadadefinisati meru unije ovih pravougaonika kao zbir njihovih mera, odnosno
m2
(n∪i=1
Pi
)=
n∑i=1
m2(Pi).
Skupovi oblika E =n∪i=1
Pi jesu elementarni skupovi (podrazumeva se da
razliciti skupovi Pi i Pj nemaju zajednickih unutrasnjih tacaka).
Ako su P , Q pravougaonici koji imaju zajednickih unutrasnjih tacaka,tada je jednostavno proveriti da se skup P ∪ Q moze prikazati kao unijakonacno mnogo pravougaonika koji uzajamno nemaju zajednickih unutrasnjihtacaka.
2.1. ZORDANOVA MERA U RN 17
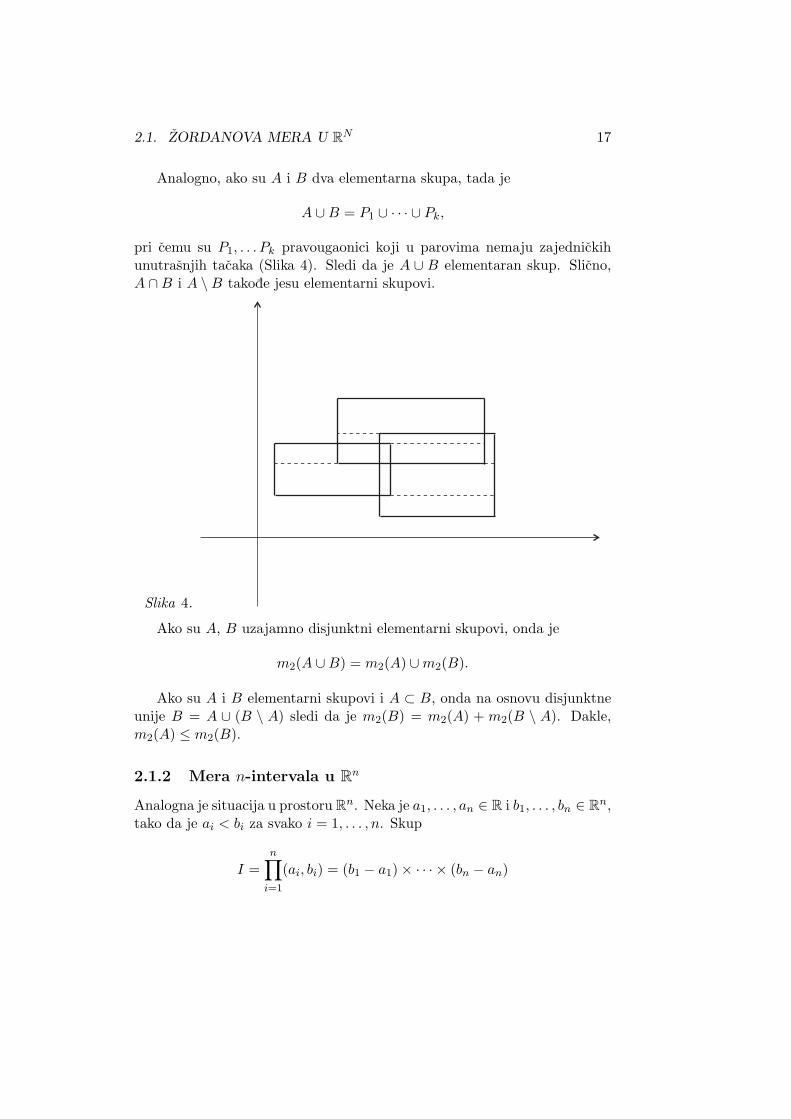
Analogno, ako su A i B dva elementarna skupa, tada je
A ∪B = P1 ∪ · · · ∪ Pk,
pri cemu su P1, . . . Pk pravougaonici koji u parovima nemaju zajednickihunutrasnjih tacaka (Slika 4). Sledi da je A ∪ B elementaran skup. Slicno,A ∩B i A \B takode jesu elementarni skupovi.
Slika 4.
Ako su A, B uzajamno disjunktni elementarni skupovi, onda je
m2(A ∪B) = m2(A) ∪m2(B).
Ako su A i B elementarni skupovi i A ⊂ B, onda na osnovu disjunktneunije B = A ∪ (B \ A) sledi da je m2(B) = m2(A) + m2(B \ A). Dakle,m2(A) ≤ m2(B).
2.1.2 Mera n-intervala u Rn
Analogna je situacija u prostoru Rn. Neka je a1, . . . , an ∈ R i b1, . . . , bn ∈ Rn,tako da je ai < bi za svako i = 1, . . . , n. Skup
I =n∏i=1
(ai, bi) = (b1 − a1)× · · · × (bn − an)

18 GLAVA 2. INTEGRACIJA
je n-interval u Rn. Ako je n = 2, onda je I pravougaonik. Ako je n =3, onda je I kvadar. Primetimo da su stranice n-intervala uvek paralelnekoordinatnim osama. n-dimenzionalna mera n-intervala I odredena je sa
mn(I) =
n∏i=1
(bi − ai) = (b1 − a1) · . . . · (bn − an).
Nije vazno da li delovi hiper-ravni koje ogranicavaju pravougaonik, pri-padaju samom pravougaoniku, ili ne: velicina mn(I) se ne menja. Ako je Jneki (n − 1)-interval koji ogranicava n-interval I, (dakle, J pripada hiper-ravni dimenzije n − 1), tada je mn(J) = 0. Specijalno, n-dimenzionalnamera jednoelementnog skupa jedaka je 0.
Primetimo da ako je J bilo koji (n− 1)-interval, onda J moze biti pos-matran kao degenerisani n-interval, odnosno aj = bj za neko j.
Ako su I1, . . . , Ik n-intervali, koji nemaju zajednickih unutrasnjih tacaka,onda je
E =
k∪j=1
Ij
elementaran skup u Rn. Mera ovog elementarnog skupa E odredena je sa
mn(E) =n∑j=1
mn(Ij).
Ako su E, F elementarni skupovi, tada su E ∪ F , E ∩ F i E \ F takodeelementarni skupovi. Naime, svaki od ovih skupova moze biti prikazan kaounija n-intervala, koji medusobno nemaju zajednickih unutrasnjih tacaka.
Ako su E,F elementarni skupovi i E ∩ F = ∅, jednostavno je proveritida vazi mn(E ∪ F ) = mn(E) ∪ mn(F ). Ova osobina se naziva konacnaaditivnost mere mn na familiji elementarnih skupova.
Ako su A,B elementarni skupovi i A ⊂ B, na osnovu disjunktne unijeB = A∪ (B \A) sledi mn(B) = mn(A)+mn(B \A) ≥ mn(A). Ova osobinase naziva monotonost mere na familiji elementarnih skupova.
2.1.3 Unutrasnja i spoljna mera
Potrebno je meru definisanu u prethodnoj sekciji, prosiriti na opstiju famil-iju podskupva od Rn. Neka je skup G ⊂ R2 ogranicen . Tada postojeelementarni skupovi koji su sadrzani u G, i postoje elementarni skupovi koji

2.1. ZORDANOVA MERA U RN 19
sadrze G. Neka je
min(G) = supm(A) : A ⊂ G i A je elementaran skup
men(G) = infm(B) : G ⊂ B i B je elementaran skup.
Obzirom da je G ogranicen skup, sledi da su min(G) i m
en(G) realni nenega-
tivni brojevi.
Broj min(G) jeste unutrasnja mera, a broj me
n(G) jeste spoljna meraskupa G. Ocigledno, uvek vazi mi
n(G) ≤ men(G).
Definicija 2.1.1. Ogranicen skup G ⊂ Rn je merljiv u Zordanovom smisluako i samo ako je mi
n(G) = men(G). U tom slucaju broj mn(G) (= mi
n(G) =men(G)) jeste (n-dimenzionalna) Zordanova mera skupa G.
Koristicemo samo Zordanovu meru, te ubuduce umesto ”Zordanova mera“pisemo ”mera“.
Za svaki merljiv skup G vazi mn(G) ≥ 0. Dokazujemo nekoliko osnovnihtvrdenja o merljivim skupovima i meri.
Teorema 2.1.1. Neka su A i B merljivi skupovi. Tada vazi:
(1) Ako je A ⊂ B, onda je mn(A) ≤ mn(B) (monotonost mere);
(2) Ako je A ⊂ Rn otvoren skup, tada je mn(A) > 0;
(3) mn(A) = 0 ako i samo ako za svako ϵ > 0 postoji elementaran skupF , tako da je A ⊂ F i mn(F ) < ϵ (karakterizacija skupa mere nula);
(4) Unija dva skupa mere nula jeste skup mere nula;
(5) Ogranicen skup H ⊂ Rn je merljiv ako i samo ako je mn(∂H) = 0;
(6) Skupovi A ∪B, A ∩B i A \B su merljivi;
(7) Ako je A ∩ B ⊂ ∂A ∩ ∂B, onda je mn(A ∪ B) = mn(A) + mn(B)(konacna aditivnost mere);
(8) Ako je A ⊂ B, tada je mn(B \A) = mn(B)−mn(A).
Dokaz. Sve navedene osobine ocigledno vaze za n-intervale i elementarneskupove. Dokazujemo ove osobine za proizvoljne merljive skupove.
(1) Sledi na osnovu skupovne inkluzije elementarnih figura skupova upi-sanih u A, a samim tim i u B.
(2) Ako je A otvoren i merljiv, onda za svako x ∈ A postoji neki otvorenn-interval I, tako da je x ∈ I ⊂ A, te je mn(A) > 0.
(3) Sledi iz definicije infimuma.
(4) Sledi na osnovu svojstva (3).
(5)Neka je F proizvoljan otvoren elementaran skup, sadrzan u H i nekaje G proizvoljan zatvoren elementaran skup koji sadrzi H.

20 GLAVA 2. INTEGRACIJA
Ocigledno vazi ∂H ⊂ G\F , odnosnoG\F je elementaran skup koji sadrzi∂H. Sa druge strane, ako je K proizvoljan elementaran skup koji sadrzi ∂H,onda postoje elementarni skupovi F i G, koji zadovoljavaju F ⊂ H ⊂ G iG \ F = K.
Pretpostavimo da je H merljiv skup i neka je ϵ > 0 proizvoljno. Postojielementaran skup F ⊂ H tako da je m(H) ≥ m(F ) > m(H)− ϵ/2. Takodepostoji elementaran skup G ⊃ H, tako da vazi mn(H) ≤ mn(G) < mn(H)+ϵ/2. Prema tome, me
n(∂H) ≤ mn(G)−mn(F ) < ϵ. Na osnovu svojstva (3)sledi da je ∂H merljiv i njegova mera je jednaka nuli.
Sada pretpostavimo da je mn(∂H) = 0. Za ϵ > 0 postoje elementarniskupovi F i G da vazi F ⊂ H ⊂ G, ∂H ⊂ G \ F i mn(G) − mn(F ) < ϵ.Tada je, na osnovu me
n(H) ≤ mn(G) i min(H) ≥ m(F ), ispunjeno me
n(H)−min(H) < ϵ. Kako je ϵ > 0 proizvoljno, sledi da je H merljiv skup.
(6) Sledi na osnovu svojstava (4), (5), kao i jednostavnih skupovnihinkluzija ∂(A∪B) ⊂ ∂A∪ ∂B, ∂(A∩B) ⊂ ∂A∪ ∂B i ∂(A \B) ⊂ ∂A∪ ∂B.
(7) Sledi na osnovu svojstava (5) i (6).
(8) Sledi na osnovu (7).
Navodimo primer ogranicenog skupa koji nije merljiv.
Primer 2.1.1. Neka je Q1 skup svih tacaka skupa [0, 1] × [0, 1], cije sukoordinate racionalni brojevi. Skup Q1 ne sadrzi ni jedan netrivijalan 2-interval, vec sadrzi samo degenerisane intervale koji se svode na jednoele-mentne skupove. Stoga je mi
2(Q1) = 0. Skup Q1 je gust u [0, 1] × [0, 1].Stoga ne postoji manja elementarna figura od [0, 1] × [0, 1] koja sadrzi Q1.Stoga je me
2(Q1) = 1. Dakle, skup Q1 nije merljiv.
2.2 Rimanov integral
2.2.1 Rimanova suma
Neka je ∥·∥ Euklidova4 norma u prostoru Rn, odnosno ako je x = (x1, . . . , xn) ∈
Rn, onda je ∥x∥ =
(n∑i=1
|xi|2)1/2
. Ako je x, y ∈ Rn i y = (y1, . . . , yn), onda
je
d(x, y) = ∥x− y∥ =
(n∑i=1
(xi − yi)2
) 12
Euklidovo rastojanje izmedu tacaka x i y.
4Euklid iz Aleksandrije, Eυκλειδηζ (oko 325. p.n.e. - 265. p.n.e.), grcki matematicar

2.2. RIMANOV INTEGRAL 21
Neka jeGmerljiv (prema tome i ogranicen) skup u Rn. Neka suG1, . . . , Gk
merljivi i uzajamno disjunktni skupovi, za koje vazi G =k∪i=1
Gi. Tada se
familija skupova P = G1, . . . , Gk naziva razbijanje (podela) skupa G. Nekaje diam(Gi) dijametar skupa Gi, odnosno
diam(Gi) = supd(u, v) : u, v ∈ Gi, i = 1, . . . , k.
Najveci od tih dijametara naziva se dijametar razbijanja P skupaG, odnosnod(P) = maxdiam(G1), . . . , diam(Gk).
Jednostavno je uociti da za svaki merljiv skup G postoji neko razbijanjeP.
Neka su TP = G1, . . . , Gk i TP ′ = E1, . . . , El dva razbijanja merljivogskupa G ⊂ Rn. Razbijanje P ′ je finije od razbijanja P, u oznaci P ′ ≻ P,ako za svako Ej ∈ P ′ postoji Gs ∈ TP, tako da je Ej ⊂ Gs.
Ako su P = G1, . . . , Gk i P ′ = E1, . . . , El dva razbijanja merljivogskupa G, tada postoji razbijanje P ∩P ′, koje je finije i od P i od P ′. Razbi-janje P ∩ P ′ je definisano kao
P ∩ P ′ = Gs ∩ Ej : s = 1, . . . , k, j = 1, . . . , l.
Ako je P proizvoljno razbijanje merljivog skupa G ⊂ Rn, uvek postojifinije razbijanje P ′ istog skupa G. Ako je, recimo, P = G1, . . . , Gk, ondase moze posmatrati razbijanje Pj = Gj1, . . . , G
jk svakog skupa Gj , te je
P ′ = Giji,j razbijanje skupa G, sa osobinom P ′ ≻ P.Ako je P = G1, . . . , Gk razbijanje merljivog skupa G, i ako je P ′ =
E1, . . . , El razbijanje merljivog skupa E, tada je
P ∪ P ′ = G1, . . . , Gk, E1, . . . , El
razbijanje merljivog skupa G ∪ E.Neka je f : G→ R realna funkcija, i neka je ξi ∈ Gi proizvoljna tacka za
svako i = 1, 2, . . . , k. Koristimo oznaku ξ = (ξ1, . . . , ξk). Suma
σ(f,G,P, ξ) =k∑i=1
f(ξi) ·mn(Gi) (2.1)
je Rimanova integralna suma funkcije f na skupu G, koja odgovara podeliP i izboru tacaka ξ = (ξ1, . . . , ξk).
Cinjenica da se svaka podela P merljivog skupa G moze uciniti finijom,omogucava uvodenje sledece definicije.

22 GLAVA 2. INTEGRACIJA
Definicija 2.2.1. (Rimanov integral funkcije na skupu) Neka je G merljivskup u Rn, i neka je f : G→ R funkcija. Broj I je Rimanov integral funkcijef na skupu G, u oznaci
∫G
f , ako za svako ϵ > 0 postoji δϵ > 0, tako da za
svako razbijanje P = G1, . . . , Gk skupa G, koje ima svojstvo d(P) < δ, iza svaki izbor tacaka ξ1 ∈ G1, . . . , ξk ∈ Gk vazi
|I − σ(f,G,P, ξ)| < ϵ.
Ako postoji integral∫G
f , onda je funkcija f integrabilna na skupu G (u
Rimanovom smislu).
Razmatracemo samo Rimanov integral funkcija, te pisemo ”integral“umesto ”Rimanov integral“.
Formulisemo ocigledan ekvivalenat uslova integrabilnosti funkcije na mer-ljivom skupu.
Teorema 2.2.1. Neka je G merljiv skup u Rn i neka je f : G→ R funkcija.Rimanov integral I funkcije f na skupu G je granicna vrednost
I =
∫G
f = limd(T )→0
σ(f,G,P, ξ),
ukoliko ova granicna vrednost postoji nezavisno od razbijanja P skupa G inezavisno od izbora tacaka ξ.
Skup svih realnih funkcija, koje su integrabilne na merljivom skupu G ⊂Rn, oznacava se sa R(G).
2.2.2 Darbuove sume
Neka je G merljiv skup u Rn, i neka je P = G1, . . . , Gk razbijanje skupaG. Neka je f : G→ R ogranicena funkcija.
Posmatramo infimum i supremum funkcije f na svakom skupu Gi:
mi = infx∈Gi
f(x) i Mi = supx∈Gi
f(x),
za svako i = 1, 2, . . . , k. Funkcija f je ogranicena, te je mi ∈ R i Mi ∈ R zasvako i.
Donja i gornja Darbuova5 suma definisane su, redom:
s(f,G,P) =
k∑i=1
mi ·mn(Gi) i S(f,G,P) =
k∑i=1
Mi ·mn(Gi).
5Jean-Gaston Darboux (1842–1917), francuski matematicar

2.2. RIMANOV INTEGRAL 23
Neka je σ(f,G,P, ξ) jedna Rimanova suma funkcije f na skupu G u odnosuna istu podelu P. Tada ocigledno vaze nejednakosti:
s(f,G,P) ≤ σ(f,G,P, ξ) ≤ S(f,G,P). (2.2)
Neka je P ′ = G′1, . . . , G
′l razbijanje skupa G sa svojstvom da za svako
j ∈ 1, . . . , l postoji neko i ∈ 1, . . . , k tako da je G′j ⊂ Gi, odnosno neka
je podela P ′ finija od podele P. Na osnovu G′j ⊂ Gi sledi da vazi
mi ≤ m′j ≤M ′
j ≤Mi.
Neka je, jednostavnosti radi, Gi = G′1 ∪ · · · ∪G′
s, s ≤ l. Tada je
s(f,Gi,P ′) =s∑t=1
m′t ·mn(G
′t),
s(f,G,P ′) =l∑
t=1
m′t ·mn(G
′t) =
k∑i=1
s(f,Gi,P ′).
Iz G′t ⊂ Gi za svako t ∈ 1, . . . , s, sledi da je m′
t ≥ mi za svako t ∈1, . . . , s. Stoga je
s(f,Gi,P ′) =
s∑t=1
m′t ·mn(G
′t) ≥ mi
s∑t=1
mn(G′t) = mi ·mn(Gi).
Sledi
s(f,G,P ′) =
n∑i=1
sT ′(f,Gi) ≥n∑i=1
mi ·mn(Gi) = s(f,G,P ′).
Za gornje Darubove sume, pod uslovom P ′ ≻ P, moze se analognopokazati suprotna nejednakost:
S(f,G,P ′) ≤ S(f,G,P).
Dakle, dokazali smo sledeci rezultat.
Teorema 2.2.2. Neka je G merljiv podskup od Rn, neka je f : G → Rogranicena funkcija, i neka su P i P ′ dva razbijanja skupa G, tako da jeP ′ ≻ P. Tada za svaki izbor tacaka ξ (svaka tacka ξi pripada odgovarajucimelementu Gi razbijanja P ′)vazi:
s(f,G,P) ≤ s(f,G,P ′) ≤ σ(f,G,P, ξ) ≤ S(f,G,P ′) ≤ S(f,G,P). (2.3)

24 GLAVA 2. INTEGRACIJA
Definicija 2.2.2. Broj If = supPs(f,G,P), gde je supremum uzet po svim
razbijanjima P skupa G, naziva se donji integral funkcije f na skupu G.
Broj If = infPS(f,G,P), gde je infimum uzet po svim razbijanjima skupa
P, naziva se gornji integral funkcije f na skupu G.
Na osnovu nejednakosti (2.3), sledi da vazi
If ≤ If .
Dokazacemo osnovnu teoremu, kojom su odredeni ekvivalentni usloviintegrabilnosti funkcije na nekom merljivom skupu.
Teorema 2.2.3. Neka je funkcija f ogranicena na merljivom skupu G ⊂ Rn.Tada su sledeca tvrdenja ekvivalentna:
(1) If = If ;
(2) Za svako ϵ > 0 postoji razbijanje T skupa G, tako da vazi ST (f,G)−sT (f,G) < ϵ;
(3) Za svako ϵ > 0 postoji δ > 0, tako da za svako razbijanje T skupa Gdijametra manjeg od δ, vazi ST (f,G)− sT (f,G) < ϵ;
(4) Postoji integral∫G
f = I.
Ako vazi bilo koje od prethodnih tvrdenja, onda je I = If = If .
Dokaz. (1) =⇒ (2): Neka je ϵ > 0. Donji integral If je supremum donjihDarbuovih suma. Stoga za ϵ > 0 postoji neka podela T1, tako da za odgo-varajucu donju Darbuovu sumu vazi sT1(f,G) > If − ϵ
2 . Gornji integral If
je infimum gornjih Darbuovih suma. Prema tome, za ϵ > 0 postoji podelaT2 sa svojstvom ST2(f,G) < If + ϵ
2 . Postoji podela T , koja je finija odpodela T1 i T2 (na primer, T = T1 ∩ T2). Tada je
If −ϵ
2< sT1(f,G) ≤ sT (f,G) ≤ If ≤ If ≤ ST (f,G) ≤ ST2(f,G) < If +
ϵ
2.
Na osnovu pretpostavke If = If , sledi da vazi ST (f,G)− sT (f,G) < ϵ.
(2) =⇒ (1): Tvrdenje sledi na osnovu ociglednih nejednakosti sT (f,G) ≤If ≤ If ≤ ST (f,G).
(4) =⇒ (3): Pretpostavimo da postoji integral I =∫G
f . Neka je ϵ > 0.
Tada postoji broj δ > 0, tako da za svaku podelu T skupa G dijametramanjeg od δ, vazi
I − ϵ
2≤ σT (f,G, ξ) < I +
ϵ
2,

2.2. RIMANOV INTEGRAL 25
nezavisno od izbora tacaka ξi ∈ Gi. U prethodnim nejednakostima se mozeuzeti, jedan za drugim, supremum ili infimum sume σT (f,G, ξ) po svimξi ∈ Gi. Odatle neposredno sledi
I − ϵ
2≤ sT (f,G) ≤ ST (f,G) ≤ I +
ϵ
2,
a samim tim i ST (f,G)− sT (f,G) < ϵ.(3) =⇒ (2): Ova implikacija je trivijalna.(3) =⇒ (4): Iz pretpostavke da vazi tvrdenje (3) sledi da vaze tvrdenja
(1) i (2). Neka je ϵ > 0. Tada postoji δ > 0, tako da za svako razbi-janje T skupa G dijametra manjeg od δ vazi ST (f,G) − sT (f,G) < ϵ. Zaproizvoljan izbor tacaka ξi ∈ Gi vazi sT (f,G) ≤ σT (f,G, ξ) ≤ ST (f,G).Takode vazi i sT (f,G) ≤ If = If ≤ ST (f,G). Prema tome, sledi da vazi|If −σT (f,G, ξ)| < ϵ, za svaku podelu T sa osobinom da je dijametar podeleT manji od δ i za proizvoljan izbor tacaka ξi ∈ Gi. Sledi da je If jednakintegralu funkcije f na skupu G, odnosno If =
∫G f .
⋆ (2) =⇒ (3): Ova implikacija je najinteresantnija. Neka je funkcijaf ogranicena konstantom M na skupu G, odnosno za svako x ∈ G neka je|f(x)| ≤M . Neka je ϵ > 0. Iz cinjenice da vazi tvrdenje (2) sledi da postojirazbijanje T = G1, . . . , Gk skupa G sa svojstvom ST (f,G)− sT (f,G) < ϵ.Neka je ni = inf
x∈Gi
f(x) i Ni = supx∈Gi
f(x), i = 1, . . . , k. Na osnovu merljivosti
skupova Gi sledi da je mera njihovog ruba jednaka nuli, odnsono mn(∂Gi) =
0 za svako i = 1, . . . , k. Neka je Γ =k∪i=1
∂Gi. Tada je mn(Γ) = 0. Postoji
elementaran skup σ, sa svojstvima Γ ⊂ σ i mn(σ) <ϵ
2M . Ne gubeci odopstosti moze se pretpostaviti da je σ otvoren skup. Postoji otvoren skupσ′ sa svojstvima: Γ ⊂ σ′ ⊂ σ i ∂σ′ ∩ ∂σ = ∅. Tada je mn(σ
′) < ϵ2M
i δ = infd(x, y) : x ∈ ∂σ′, y ∈ ∂σ > 0. Neka je T1 = F1, . . . , Flproizvoljno razbijanje skupa G dijametra d sa svojstvom d < δ. Tada je
ST1(f,G)− sT1(f,G) =l∑
i=1
(Mi −mi) ·m(Fi),
pri cemu je mi = infx∈Fi
f(x) i Mi = supx∈Fi
f(x), za svako i = 1, . . . , l. Neka su
I i J podskupovi skupa 1, . . . , l sa svojstvima: i ∈ I ako i samo ako Fiima neprazan presek sa Γ, a j ∈ J ako i samo ako Fj ∩ Γ = ∅. Ako je i ∈ I,tada vazi Fi ⊂ σ. Stoga je∑
i∈I(Mi −mi) ·m(Fi) ≤ 2M
∑i∈I
m(Fi) < ϵ.

26 GLAVA 2. INTEGRACIJA
Ako je j ∈ J , tada Fj ∩ Γ = ∅ i po konstrukciji skupa Γ sledi da mora bitiFj ⊂ Gi za neko i. Sve takve skupove obelezimo sa G1, . . . , Gt. Takode nekaje F1, . . . , Fs1 ⊂ G1,. . . ,Fst−1 , . . . , Fst ⊂ Gs. Tada vazi
∑j∈J
(Mj −mj) ·m(Fj) =
s∑i=1
si∑j=si−1
(Mj −mj) ·m(Fj)
≤s∑i=1
(Ni − ni)
si∑j=si−1
m(Fj) ≤s∑i=1
(Ni −mi) ·m(Gi) < ϵ.
Na kraju,
ST1(f,G)− sT1(f,G)=∑i∈I
(Mi −mi) ·m(Fi) +∑j∈J
(Mj −mj) ·m(Fj)<2ϵ.
Time je dokazano tvrdenje (3).
2.2.3 Oznake i terminologija
Ako je G merljiv skup u R2 i f ∈ R(G), onda je cesta oznaka∫G
f =
∫∫G
f =
∫∫G
f(x, y) dx dy.
Integral∫∫G
f naziva se dvostruki integral funkcije f na skupu G.
Ako je G merljiv skup u R3 i f ∈ R(G), onda je∫G
f =
∫∫∫G
f =
∫∫∫G
f(x, y, z) dx dy dz.
Integral∫∫∫G
f je trostruki integral funkcije f na skupu G.
Konacno, ako je G merljiv skup u Rn i f ∈ R(G), onda je∫G
f =
∫· · ·∫G︸ ︷︷ ︸
n puta
f =
∫· · ·∫G︸ ︷︷ ︸
n puta
f(x1, . . . , xn) dx1 · · · dxn.
Integral∫· · ·∫G
f je n-integral funkcije f na skupu G.

2.3. KLASE INTEGRABILNIH FUNKCIJA 27
2.3 Klase integrabilnih funkcija
Neka je G ⊂ Rn proizvoljan merljiv skup. Nisu sve funkcije, koje su defin-isane na skupu G, obavezno integrabilne na skupu G. Sa druge strane, akoje G ⊂ Rn proizvoljan merljiv skup i ako je g(x) = 0 za svako x ∈ G, tadaje g(ξi) = 0 za svaku tacku ξi ∈ Gi. Stoga vazi
∫G
g(x) dx = 0. Sledi da
je nula-funkcija integrabilna na svakom merljivom skupu i njen integral natom skupu je jednak nuli.
Skup intergabilnih funkcija, pod odredenim uslovima, sadrzi sve nepre-kidne funkcije. Preciznije, vazi sledeca teorema.
Teorema 2.3.1. Ako je realna funkcija f definisana i neprekidna na zatvorenomi merljivom skupu G u Rn, tada je funkcija f integrabilna na G.
Dokaz. SkupG je merljiv i stoga je ogranicen. Sledi da jeG kompaktan skup.Prema Kantorovoj6 teoremi, funkcija f je ravnomerno neprekidna na skupuG. Neka je ϵ > 0. Na osnovu ravnomerne neprekidnosti funkcije f sledida postoji broj δ > 0, tako da za svake dve tacke x1, x2 ∈ G sa svojstvomd(x1, x2) < δ vazi |f(x1) − f(x2)| < ϵ
mn(G) . Neka je T = G1, . . . , Gkproizvoljno razbijanje skupa G dijametra manjeg od δ. Imajucu u vidustandardne oznake mi i mi, sledi da vazi
Mi −mi = supx∈Gi
f(x)− infx∈Gi
f(x) = supx∈Gi
f(x) + supx∈Gi
(−f(x))
= supx1,x2∈Gi
(f(x1)− f(x2)) ≤ supx1,x2∈Gi
|f(x1)− f(x2)| ≤ϵ
mn(G).
Za odgovarajuce Darbuove sume funkcije f na skupuG, ispunjeno je ST (f,G)−sT (f,G) < ϵ. Prema Teoremi 2.2.3, postoji integral
∫G
f .
Ako je G ⊂ Rn, tada je skup realnih i neprekidnih funkcija na G oznacensa C(G). Na osnovu prethodne teoreme, ako je G merljiv i zatvoren (tj. Gje merljiv kompakt), onda je C(G) ⊂ R(G).
Teorema 2.3.2. Neka je realna funkcija f definisana i ogranicena na mer-ljivom i zatvorenom skupu G ⊂ Rn, takva da je mera skupa tacaka prekidafunkcije f jednaka nuli. Tada je funkcija f integrabilna na skupu G.
Dokaz. Neka jeM = supx∈G
|f(x)| <∞, neka je E skup tacaka prekida funkcije
f u skupu G, i neka je ϵ > 0. Na osnovu m(E) = 0, sledi da postoji otvoren
6Georg Ferdinand Ludwig Philipp Cantor (1845-1918), nemacki matematicar

28 GLAVA 2. INTEGRACIJA
elementaran skup F , tako da je E ⊂ F im(F ) < ϵ4M . Skup G\F je zatvoren
i merljiv. Na osnovu Teoreme 2.3.1 funkcija f je integrabilna na skupu G\F .Prema tome, postoji razbijanje T = G1, . . . , Gk skupa G \F , za koje vazi
ST (f,G \ F )− sT (f,G \ F ) < ϵ
2.
Neka je Gk+1 = G ∩ F . Tada je T1 = T ∪ Gk+1 razbijanje skupa G i vazim(Gk+1) ≤ m(F ) < ϵ
4M . Stoga, uz prirodne oznake Mi i mi, vazi
ST1(f,G)− sT1(f,G) ≤
≤ (Mk+1 −mk+1) ·m(Gk+1) +k∑i=1
(Mi −mi) ·m(Gi)
≤ 2Mϵ
4M+ϵ
2= ϵ.
Na osnovu Teoreme 2.2.3 (2) sledi da je funkcija f integrabilna na skupuG.
2.4 Svojstva Rimanovog integrala
Dokazujemo osnovna svojstva Rimanovog integrala. Neka je G merljiv skupu Rn, i neka je f : G→ R funkcija definisana na G.
(1) Ako je mn(G) = 0, onda je∫G
f = 0.
Dokaz. Na osnovu mn(G) = 0 sledi σT (f,G, ξ) = 0, te je i∫G
f = 0.
(2)∫G
1 = mn(G), pri cemu je 1 konstanta funkcija x 7→ 1 za svako x ∈ G.
Dokaz. Za proizvoljno razbijanje T merljivog skupa G vazi
σT (f,G, ξ) =
m∑i=1
1 ·mn(Gi) = mn
(m∪i=1
Gi
)= mn(G).
Posledica 2.4.1. Ako je G merljiv skup u R2, onda je∫∫G
dx dy = m2(G).
Ako je V merljiv skup u R3, onda je∫∫∫V
dx dy dz = m3(V ).
(3) Ako je f(x) ≥ 0 za svako x ∈ G, i ako je f integrabilna funkcija naG, onda je
∫G
f ≥ 0.
2.4. SVOJSTVA RIMANOVOG INTEGRALA 29
Dokaz sledi na osnovu nejednakosti
σT (f,G, ξ) =
n∑i=1
f(ξi) ·m(Gi) ≥ 0
i definicije Rimanovog integrala.
(4) Ako su f i g integrabilne funkcije na G, i ako je α, β ∈ R, onda jefunkcija αf + βg integrabilna na G i vazi∫
G
(αf + βg) = α
∫G
f + β
∫G
g.
Dokaz ovog tvrdenja sledi na osnovu jednakosti
σT (αf + βg,G, ξ) = α · σT (f,G, ξ) + β · σT (f,G, ξ).
(5) Ako su f i g integrabilne funkcije na G, i ako za svako x ∈ G vazif(x) ≤ g(x), tada je
∫G
f ≤∫G
g.
Dokaz sledi neposredno na osnovu (3) i (4), imajuci u vidu da je g−f ≥ 0na G.
(6) Neka su A i B merljivi skupovi u Rn, A ⊂ B, i neka je f ogranicenai integrabilna funkcija na B. Tada je f integrabilna funkcija na A.
Dokaz. Skup C = B \ A je merljiv. Svako razbijanje skupova A i Cindukuje jedno razbijanje skupa B. Obrnuto, svako razbijanje skupa Bmoze se uciniti finijijm, tako da je to razbijanje unija razbijanja skupa A irazbijanja skupa C. Stoga, neka je T razbijanje skupa B, koje se sastoji odrazbijanja T1 skupa A i razbijanja T2 skupa C. Vazi ocigledna nejednakost:
0 ≤ ST1(f,A)− sT1(f,A) ≤ ST (f,B)− sT (f,B).
Neka je ϵ > 0. Kako je f ∈ R(B), sledi da postoji razbijanje T skupa Btako da je ST (f,B) − sT (f,B) < ϵ. Prema prethodnom, T = T1 ∪ T2, pricemu je T1 razbijanje skupa A, dok je T2 razbijanje skupa B \ A. Sledi daje ST1(f,A)− sT1(f,A) < ϵ, te je f ∈ R(A).
(7) Neka je G0 ⊂ G i mn(G0) = 0. Funkcija f je integrabilna na G akoi samo ako je f integrabilna na G \G0; u tom slucaju je
∫G
f =∫
G\G0
f .
Dokaz. Svako razbijanje skupova G0 i G\G0 dovodi do razbijanja skupaG. Obrnuto, ako je T razbijanje skupa G, onda postoje razbijanja: T1 skupaG \ G0 i T2 skupa G1, tako da T1 ∪ T2 jeste finije razbijanje of T . Dakle,

30 GLAVA 2. INTEGRACIJA
bez gubljenja opstosti, posmatramo razbijanje T = T1 ∪ T2, pri cemu je T1razbijanje skupaG\G0, a T2 je razbijanje skupaG0. Kako je σT (f,G0, ξ) = 0za svaki izbor tacaka ξ, sledi da je σT (f,G, ξ) = σT (f,G \ G0, ξ). Odvadesledi rezultat, prelaskom na granicnu vrednost kada d(T ) → 0.
(8) Neka su A i B merljivi skupovi u Rn sa svojstvima: mn(A∩B) = 0,A ∪B = G, i neka je funkcija f ogranicena na skupu G. Tada je funkcija fintegrabilna na skupu G, ako i samo ako je f integrabilna na skupovima Ai B. U tom slucaju vazi jednakost∫
G
f =
∫A
f +
∫B
f. (2.4)
Dokaz. Svako razbijanje skupova A i B proizvodi razbijanje skupa G.Sa druge strane, svako razbijanje skupa G moze se uciniti finijim tako, dasu skupovi novog razbijanja sadrzani i u polaznom razbijanju skupa A i upolaznom razbijanju skupa skupa B. Cinjenica mn(A ∩ B) = 0 garantujeda je integral na skupu G bilo koje integrabilne funkcije jednak integralu teiste funkcije na skupu G \ (A ∩B). Prema tome, posmatramo razbijanje Tskupa G koje indukuje razbijanje T1 skupa A i razbijanje T2 skupa B, pricemu zanemarujemo skup A ∩B. Sledi ocigledna jednakost
σT (f,G) = σT1(f,A) + σT2(f,B). (2.5)
Ukoliko postoje integrali∫A
f i∫B
f , tada postoji i integral∫
A∪Bf , te sledi
trazena jednakost integrala (2.4).Obrnuto, iz ogranicenosti i integrabilnosti funkcije f na skupu G, sledi
integrabilnost funkcije f na skupovima A i B.
(9) Ako su f i g ogranicene i integrabilne funkcije na merljivom skupuG ⊂ Rn, tada je i fg integrabilna na skupu G.
Dokaz. Obzirom da su funkcije f i g ogranicene na skupu G, postoji nekibroj L > 0, tako da za svako x ∈ G vazi |f(x)| ≤ L i |g(x)| ≤ L. Neka jeϵ > 0 proizvoljan broj. Na osnovu ogranicenosti i integrabilnosti funkcija fi g na skupu G, sledi da postoji razbijanje T = G1, . . . , Gl skupa G, takoda vazi
ST (f,G)− sT (f,G) =
l∑i=1
(Mi −mi) ·m(Gi) <ϵ
2Li
ST (g,G)− sT (g,G) =l∑
i=1
(Ni − ni) ·m(Gi) <ϵ
2L.

2.4. SVOJSTVA RIMANOVOG INTEGRALA 31
Pri tome koristimo oznake:
Mi = supx∈Gi
f(x), mi = infx∈Gi
f(x),
Ni = supx∈Gi
g(x), ni = infx∈Gi
g(x),
Ki = supx∈Gi
f(x)g(x), ki = infx∈Gi
f(x)g(x).
Na osnovu osobina supremuma i infimuma, vazi sledeca procena:
Ki − ki = supGi
|fg| − infGi
|fg| ≤ supGi
|f | · supGi
|g| − infGi
|f | · infGi
|g|
=MiNi −mini =MiNi −miNi +miNi −mini
= Ni(Mi −mi) +mi(Ni − ni) ≤ L[(Mi −mi) + (Ni − ni)].
Na osnovu poslednje nejednakosti, sledi da vazi:
ST (fg,G)− sT (fg,G) =
l∑i=1
(Ki − ki) ·m(Gi)
≤ L [(ST (f,G)− sT (f,G)) + ST (g,G)− sT (g,G))] < ϵ.
Prema tome, funkcija fg je integrabilna na skupu G.
(10) Ako je funkcija f ogranicena i integrabilna na G, onda je funkcija|f | takode integrabilna na G i vazi∣∣∣∣∣∣
∫G
f
∣∣∣∣∣∣ ≤∫G
|f |.
Dokaz. Neka je ϵ > 0. Na osnovu ogranicenosti i integrabilnosti funkcijef na skupu G, postoji podela T = G1, . . . , Gl skupa G, tako da vazinejednakost
ST (f,G)− sT (f,G) =
l∑i=1
(Mi −mi) ·m(Gi) < ϵ.
Koristimo oznake
32 GLAVA 2. INTEGRACIJA
Mi = supx∈Gi
f(x), mi = infx∈Gi
f(x),
Ni = supx∈Gi
|f(x)|, ni = infx∈Gi
|f(x)|.
Na osnovu nejednakosti∣∣∣ |f(x)| − |f(y)|
∣∣∣ ≤ |f(x)− f(y)|, sledi nejednakostNi − ni ≤ |Mi − mi|, za svako i = 1, . . . , l. Na osnovu ove nejednakostiproizilazi procena
ST (|f |, G)− sT (|f |, G) ≤ ST (f,G)− sT (f,G) < ϵ.
Prema tome, funkcija |f | je integrabilna na skupu G.
Neka su sada σ1T (f,G, ξ) =t∑i=1
f(ξi) ·mn(Gi) i σ2T (f,G, ξ) =
t∑i=1
|f(ξi)| ·
m(Gi) Rimanove sume za integrale∫G
f i∫G
|f | redom. Na osnovu ocigledne
nejednakosti |σ1T (f,G, ξ)| ≤ σ2T (|f |, G, ξ), sledi odgovarajuca nejednakostintegrala.
(11) (Teorema o srednjoj vrednosti interala) Neka je G merljiv skup uRn, f, g : G → R integrabilne funkcije, m ≤ f(x) ≤ M za svako x ∈ G, ig(x) ≥ 0 za svako x ∈ G. Tada postoji tacka λ ∈ [m,M ], tako da je∫
G
fg = λ
∫G
g.
Ako je uz to G povezan i kompaktan skup, i ako je f neprekidna funkcijana G, tada postoje tacke ν, ξ ∈ G tako da je∫
G
fg = f(ν)
∫G
g i f(ξ) =1
mn(G)
∫G
f.
Dokaz. Na osnovu 0 ≤ g i m ≤ f ≤ M , sledi mg ≤ fg ≤ Mg, te jem∫G
g ≤∫G
fg ≤ M∫G
g. Ako je∫G
g = 0, onda λ moze biti bilo koji realan
broj. Ako je∫G
g > 0, tada na osnovu prethodne procene vazi
λ =
∫G
fg∫G
g∈ [m,M ].

2.5. GEOMETRIJSKI I FIZICKI SMISAO INTEGRALA 33
Ako je G povezan i kompaktan skup i f neprekidna funkcija na G, tadaf dostize svoj minimum i maksimum na G. Stoga se moze uzeti
m = minx∈G
f(x), M = maxx∈G
f(x).
Na osnovu povezanosti skupa G sledi da postoji ν ∈ G sa svojstvom f(ν) =λ ∈ [m,M ].
Poslednja jednakost sledi ako se posmatra funkcija g(x) = x za svakox ∈ G.
2.5 Geometrijski i fizicki smisao integrala
Dokazujemo sledece tvrdenje, koje je relevantno za geometrijsko shvatanjeintegrala.
Teorema 2.5.1. Neka je G ⊂ Rn merljiv skup, i neka je funkcija f ogranicenai integrabilna na skupu G. Tada grafik funkcije f , odnosno skup
Γr(f) = (x, f(x)) : x ∈ G ⊂ Rn+1,
jeste merljiv u Rn+1 i njegova mera jeste nula, odnosno mn+1(Γr(f)) = 0.
Dokaz. ⋆ Neka je k ∈ N. U prostoru Rn (koji sadrzi G) posmatramohiper-ravni koje su normalne na svaku koordinatnu osu (dakle, paralelnesvim preostalim koordinatnim osama) i tu osu seku u tacki 1
2k· l, pri cemu
je l ∈ Z. Na taj nacin se dobija 12k-mreza prostora Rn.
Dakle, ako je k = 1, onda postoji familija hiper-ravni, tako da je odredenapotfamilija tih ravni normalna na jednu koordinatnu osu i tu osu pomenutapotfamiliha hiper-ravni sece u tackama: 0, 1,−1, 2,−2, . . . .
Ako je k = 2, onda hiper-ravni seku koordinatnu osu (onu osu kojoj suhiper-ravani normalne) u tackama 0, 12 ,−
12 , 1,−1, 32 ,−
32 , 2,−2, . . . .
Dakle, 12 -mreza je finija od 1-mreze, 1
4 -mreza je finija od 12 -mreze, i tako
redom.Za svako k ∈ N posmatramo n-intervale odredene 1
2k-mreznom, koji su
sadrzani u G. Neka su to skupovi Ek1 , Ek2 , . . . , Eklk. Tada je
F k =
lk∪i=1
Eki ⊂ G,
te je i
mn(Fk) =
lk∑i=1
mn(Eki ) ≤ mn(G).

34 GLAVA 2. INTEGRACIJA
Skup G je merljiv, te je
limk→∞
mn(Fk) = mi
n(G) = mn(G).
Neka je ϵ > 0. Postoji k ∈ N, tako da je
mn(G)− ϵ < mn(Fk) ≤ mn(G).
Posmatrajmo sada skup G kao podskup prostora Rn+1. Svaki skup Ekije n-interval, ali je to istovremeno degenerisani n + 1-interval, koji ima 2k
temena, i temena su oznacena sa T1, . . . , T2k . Neka je ξi ∈ Eki . Kroz svakoteme posmatramo pravu paralelnu dodatoj osi, koja je n + 1 po redu (tj.prava je paralelna koordinatnoj osi koja ne pripada polaznom prostoru Rn).Posmatramo duzi na toj pravoj, koje polaza od temena Tj , a zavrsavaju,redom, u tackama sa vrednostima mj , f(ξj),Mj . Ako je k dovoljno velikibroj, onda su mj , f(ξj),Mj istog znaka (osim ako je f(ξj) = 0, ali ovajspecijalan slucaj ne predstavlja sustinksu prepreku u razmatranju). Nekaje, na primer mj , f(ξj),Mj > 0.
Posmatrajmo (n+ 1)-intervale
Kj = Ekj × (0,mj), Lj = Ekj × [0,Mj ].
Tada je
mn+1(Kj) = mn(Ekj ) ·mj , mn+1(Lj) = mn(E
kj ) ·Mj .
Grafik funkcije f na skupu Ej je sadrzan u skupu Lj \Kj . Stoga je grafik
funkcije f na skupu F k sadrzan u skupulk∪j=1
(Kj \ Lj).
Vazi
mn+1
lk∪j=1
(Kj \ Lj)
=
kl∑j=1
(Mj −mj)mn(Ekj ).
Poslednja suma je razlika gornje i donje Darbuove sume funkcije f na skupuF k. Funkcija f je integrabilna na G, pa je integrabilna i na F k.
Stoga postoji novi broj k ∈ N (veci od prethodnog k), tako da je
kl∑j=1
(Mj −mj)mn(Ekj ) < ϵ.
Sada je
S(f,G)− s(f,G) = S(f, F k)− s(f, F k) + S(f,G \ F k)− s(f,G \ F k).
2.5. GEOMETRIJSKI I FIZICKI SMISAO INTEGRALA 35
Funkcija f je ogranicena, te je |f | ≤ N na skupu G. Dakle, za unapredzadani broj ϵ > 0 postoji broj k ∈ N (odnosno, postoji mreza 1
2kkoja
indukuje razbijanje skupa G), tako da je
S(f,G)− s(f,G) ≤ ϵ+Nϵ.
Imamo u vidu da je grafik funkcije f sadrzan u (n + 1)-intervalima cija je(n+ 1)-mera manja od ϵ+ 2Mϵ.
Sledi da je mn+1(Γr(f)) = 0.
2.5.1 Interpretacija dvostrukog integrala
Razmotrimo dvostruki integral. Neka je G merljiv skup u R2, i neka jef : G → R nenegativna, ogranicena i integrabilna funkcija. Unutrasnjostskupa G oznacimo sa G, a rub skupa G oznacimo sa ∂G. Iz merljivostiskupa G sledi da je m2(∂G) = 0. Stoga je∫∫
G
f =
∫∫G
f.
Grafik Γr(f) = (x, y, z) : (x, y) ∈ G, z = f(x, y) je grafik povrsi u R3.Posmatrajmo cilindar V odreden skupom G, skupom Γr(f), cije su izvodniceparalelne z-osi, i sve izvodnice prolaze kroz ∂G. Na ovaj nacin je ogranicenskup u prostoru R3. Na osnovu prethodne teoreme, m3(Γr(f)) = 0. Takodeje m3(G) = 0, jer je G ogranicen i degenerisan skup u R3.
Procenimo meru cilindarske povrsi, oznacene sa K. Kako je m2(∂G) =0, skup ∂G je pokriven elementarnim 2-intervalima cija je ukupna meraproizvoljno mala (tj. moze se uciniti manjom od bilo kog unapred zadanogbroja ϵ > 0). Stoga je cilindarska povrs K sadrzana u uniji konacno mnogo3-intervala, cija se ukupna trodimenzionalna mera moze uciniti proizvoljnomalom. Stoga je m3(K) = 0.
Dakle, m3(V ) ne zavisi od trodimenzionalnih mera skupova G,Γr(f),K.Posmatrajmo proizvoljnu 1
2k-mrezu prostora R2, koja indukuje razbijanje
T skupa G. Donje i gornje Darbuove sume funkcije f na skupu G, induko-vane razbijanjem T , sada cine trodimenzionalne mere cilindara upisanih uV , i cilindara opisanih oko V .
Funkcija f je integrabilna na G, te je∫∫G
f = m3(V ).
Ukoliko bi funkcija f bila negativna na G, onda bi bilo∫∫G
f = −m3(V ).

36 GLAVA 2. INTEGRACIJA
2.5.2 Interpretacija trostrukog integrala
Trostruki integral ima jednostavnu fizicku interpretaciju. Neka je G merljivskup u R3, koji je model nekog tela u prostoru. Pretpostavimo da je fnenegativna, ogranicena i integrabilna funkcija na G, koju smatramo funkci-jom raspodele gustine tela G. Posmatramo razbijanje T = G1, . . . , Gmskupa G, koje je dovoljno fino, odnosno dovoljno malog dijametra, da sefunkcija raspodele gustine f u skupu (telu) Gi neznatno razlikuje od kon-stante. Tada je za svako ξi ∈ Gi velicina f(ξi) · m(Gi) priblizno jednakamasi tela Gi. Prema tome, Rimanova suma σT (f,G) priblizno je jednakamasi tela G. Ocigledno, greska u racunu se smanjuje ukoliko se smanjuje idijametar podele T .
Dakle, pod pretpostavkom da je funkcija f raspodela gustine tela G,sledi da je
∫∫∫G
f masa tela G.
2.6 Specificnosti integrala u Rn za n ≥ 2
Rimanov integral funkcije f na skupu G je prirodno uopstenje integrala na[a, b]. Definicija integrala, kako smo do sada pokazali, zahteva uvodenjepojma mere u Rn. Bogatija geometrijska struktura prostora Rn u odnosuna R donosi izvesne specificne osobine integrala, koje se ne zasnivaju samona razlicitoj interpretaciji mere.
U slucaju integralab∫af(x) dx funkcije jedne promenljive, u samoj defini-
ciji je sadrzan uslov ogranicenosti funkcije f . U suprotnom radi se o nesvoj-stvenom integralu, koji se posebno razmatra.
Medutim, ako je G merljiv skup u Rn, n ≥ 2, i f ∈ R(G), onda funkcijaf ne mora biti obavezno ogranicena.
Primer 2.6.1. Neka je G = [0, 1]×0 segment u R2. Ocigledno, m2(G) =0. Bilo koja realna funkcija f sa domenom G, mora biti integrabilna na G.Na primer, neka je za svako y ∈ R:
f(x, y) =
1x , x ∈ (0, 1],
0, x = 0.
Funkcija f ocigledno nije ogranicena, ali je∫∫G
f = 0 (Slika 5).

2.6. SPECIFICNOSTI INTEGRALA U RN ZA N ≥ 2 37
Slika 5.1
O
Definicija 2.6.1. Merljiv skup G ⊂ Rn je jednostavan, ako za svako ϵ > 0postoji razbijanje T skupa G, tako da je d(T ) < ϵ i da je svaki skup iz Tpozitivne n-dimenzionalne mere.
Skup G u Primeru 2.6.1 nije jednostavan, jer za bilo koju podelu T skupaG, svaki element iz G ima dvodimenzionalnu meru jedanku nuli.
Sa druge strane, mnogi skupovi zaista jesu jednostavni.
Teorema 2.6.1. Ako je G otvoren i merljiv skup u Rn, onda je G jednos-tavan skup.
Dokaz. ⋆ Neka je G otvoren merljiv skup, i neka je ϵ > 0. Posmatrajmo12k-mrezu prostora Rn. Ako je Ekj jedan n-interval odreden ovom mrezom,
onda je njegov dijametar d(Ekj ) =√
n22k
. Postoji k ∈ N tako da je d(Ekj ) < ϵ.
Za ovako odabrano k, posmatrajmo razbijanje T = Ekj ∩ G : j skupa G,
pri cemu posmatramo samo neprazne skupove Ekj ∩G.Pretpostavimo da postoji neki Ek
j ∩ G, tako da je mn(Ekj ∩ G) = 0.
Tada skup Ekj ∩ G ne sadrzi ni jedan otvoreni n-interval. Stoga G ima
prazan presek sa (Ekj ). Prema tome, G sece samo rub skupa Ekj u nekoj
tacki x. Ako bi x bila unutrasnja tacka skupa G, onda bi skup G sekaounutrasnost skupa Ekj , sto je nemoguce. Dakle, x ∈ ∂G. Poslednja cinjenicaje nemoguca, jer je G otvoren, pa G ne sadrzi ni jednu svoju rubnu tacku.
Sledi da je mn(Ekj ∩G) > 0 za svaki skup Ekj ∩G.
Ako je G merljiv podskup od Rn, i ako je skup G jednostavan, onda jei skup G jednostavan. Stoga su i zatvorenja otvorenih merljivih skupovatakode jednostavni skupovi.
Teorema 2.6.2. Ako je G merljiv i jednostavan skup u Rn, i ako je f ∈R(G), onda je f ogranicena na G.

38 GLAVA 2. INTEGRACIJA
Dokaz. Pretpostavimo da je f neogranicena na G. Za proizvoljno δ >0 postoji razbijanje T = G1, . . . , Gk skupa G, tako da je d(T ) < δ im(Gj) > 0 za svako j = 1, . . . , k. Funkcija f nije ogranicena na bar jednomelementu iz T , recimo f nije ogranicena na G1. Posmatrajmo proizvoljnetacke ξj ∈ Gj za j = 1, . . . , k, i odgovarajucu Rimanovu sumu
σT (f,G, ξ) = f(ξ1)mn(G1) +
k∑j=2
f(ξj)mn(Gj).
Fiksirajmo vrednosti ξ2, . . . , ξk. Tada za svako M > 0 mozemo odabratitacku ξ1 ∈ G1, tako da je |σT (f,G, ξ)| ≥ M . Ovo je u suprotnosti sapretpostavkom f ∈ R(G).
Sledi da je f ogranicena na G.
2.7 Izracunavanje integrala
Integrale funkcija na merljivivm skupovima iz Rn izracunavamo najcescenjihovim svodjenjem na ponovljene integrale.
2.7.1 Slucaj prostora R2
Dokazacemo najpre osnovne rezultate u prostoru R2.
Teorema 2.7.1. Pretpostavimo da vazi:(1) Funkcija (x, y) 7→ f(x, y) je integrabilna u pravougaoniku Π = (x, y) :
a ≤ x ≤ b, c ≤ y ≤ d;
(2) Za svako x ∈ [a, b] postoji integrald∫cf(x, y) dy.
Tada integral x 7→d∫cf(x, y) dy definise integrabilnu funkciju po x na
segmentu [a, b] i vazi
∫∫Π
f(x, y) dx dx =
b∫a
d∫c
f(x, y) dy
dx ≡b∫a
dx
d∫c
f(x, y) dy.
Dokaz. Odaberimo tacke c = y0 < y1 < y2 < · · · < yn = d i a = x0 < x1 <x2 < · · · < xm = b sa svojstvom yi − yi−1 = h za svako i i xj − xj−1 ≤ hza svako j. Odaberimo proizvoljne tacke αj ∈ [xj−1, xj ] i βi ∈ [yi−1, yi]. Naovaj nacin postigli smo razbijanje segmenata [c, d] i [a, b], kao i razbijanje

2.7. IZRACUNAVANJE INTEGRALA 39
pravougaonika Π manjim pravougaonicima sa temenima u tackama (xj , yi).Za proizvoljno x ∈ [a, b] vazi da je
sh(x) =n∑i=1
f(x, βi)(yi − yi−1) =n∑i=1
f(x, βi)h
Rimanova suma integralad∫cf(x, y) dy. Takode,
σh =
n∑i=1
m∑j=1
f(αj , βi)(xi − xi−1)(yj − yj−1)
=
n∑i=1
m∑j=1
f(αj , βi)(xi − xi−1)h
je Rimanova suma koja odgovara integralu∫∫Π
f(x, y) dx dy. Posmatrajmo
Rimanovu sumu integralab∫ash(x) dx, koja je jednaka
Sh =
m∑j=1
sh(αj)(xj − xj−1) = σh.
Zbog uslova xj − xj−1 ≤ h za svako j, sledi da ako dijametar podele skupaΠ tezi nuli, onda teze nuli i dijametri podele segmenata [c, d] i [a, b], a ovacinjenica se jednostavno opisuje kao h → 0. Na osnovu jednakosti dvojne iponovljene granicne vrednosti funkcija dve promenljive, proizilazi i jednakostintegrala: ∫∫
Π
f(x, y) dx dy =
b∫a
d∫c
f(x, y) dy
dx.
Time je teorema dokazana.
Primer 2.7.1. Izracunati∫∫Π
xy dx dy, gde je Π = [0, 1]× [2, 3].
Resenje. Funkcija (x, y) 7→ f(x, y) = xy je neprekidna, te stoga i integra-bilna na skupu Π. Na osnovu Teoreme 2.7.1, sledi∫∫
Π
xy dx dy =
1∫0
x dx
3∫2
y dy =5
4.

40 GLAVA 2. INTEGRACIJA
Definicija 2.7.1. Neka su φ i ψ neprekidne funkcije na segmentu [a, b] i zasvako x ∈ [a, b] neka vazi φ(x) ≤ ψ(x). Skup
Ω = (x, y) : φ(x) ≤ y ≤ ψ(x), a ≤ x ≤ b
jeste elementaran skup u odnosu na y-osu (Slika 6).
Slika 6.
Teorema 2.7.2. Skup Ω u prethodnoj Definiciji 2.7.1 je merljiv u R2.
Dokaz. Neka je I duz u ravni koja spaja tacke (a, φ(a)) i (a, ψ(a)). Neka jeJ duz koja spaja tacke (b, φ(b)) i (b, ψ(b)). Tada je rub skupa Ω
∂Ω = I ∪ J ∪ Γr(φ) ∪ Γr(ψ),
gde je Γr(φ) grafik funkcije φ, a Γr(ψ) grafk funkcije ψ. Grafik integrabilnefunkcije, a samim tim i neprekidne funkcije, ima dvodimenzionalnu merujednaku nuli. Dakle, m2(∂Ω) = 0, odakle proizilazi da je skup Ω merljiv uR2.
Teorema 2.7.3. Neka je Ω elementaran skup u odnosu na y-osu, odredenDefinicijom 2.7.1. Neka je (x, y) 7→ f(x, y) integrabilna funkcija na skupu
Ω, pri cemu za svako x ∈ [a, b] postoji integralψ(x)∫φ(x)
f(x, y) dy. Tada vazi
sledeca formula
∫∫Ω
f(x, y) dx dy =
b∫a
dx
ψ(x)∫φ(x)
f(x, y) dy.
Dokaz. Funkcije φ i ψ su neprekidne na segmentu [a, b] i dostizu, redom,svoj minimum i maksimum na ovom segmentu. Neka je
c = minx∈[a,b]
φ(x), d = maxx∈[a,b]
ψ(x).

2.7. IZRACUNAVANJE INTEGRALA 41
Ocigledno je Ω ⊂ Π = [a, b] × [c, d]. Skup Ω je merljiv, pa je i skup Π \ Ωtakode merljiv. Neka je funkcija F definisana na skupu Π sledeci nacin:
F (x, y) =
f(x, y), (x, y) ∈ Ω,
0, (x, y) ∈ Π \ Ω.
Sledi ∫∫Π
F (x, y) dx dy =
∫∫Ω
F (x, y) dx dy +
∫∫Π\Ω
F (x, y) dx dy
=
∫∫Ω
f(x, y) dx dy.
Prema Teoremi 2.7.1, proizilazi da vazi
∫∫Ω
f(x, y) dx dy =
b∫a
dx
d∫c
F (x, y) dy
=
b∫a
dx
φ(x)∫c
0 dy +
ψ(x)∫φ(x)
f(x, y) dy +
d∫ψ(x)
0 dy
=
b∫a
dx
ψ(x)∫φ(x)
f(x, y) dy.
Time je teorema dokazana.
Primer 2.7.2. Izracunati integral∫∫G
x2 dx dy na skupu G = (x, y) : −1 ≤
x ≤ 1, x2 ≤ y ≤ 1 (Slika 7).
Slika 7.

42 GLAVA 2. INTEGRACIJA
Resenje. Na osnovu Teoreme 2.7.3, vazi:
∫∫G
x2 dx dy =
1∫−1
dx
1∫x2
x2 dy =
1∫−1
x2(1− x2) dx =4
15.
Primer 2.7.3. Neka je G skup ogranicen kruznicama x2 + y2 = 4 i x2 −2x+y2 = 0. Prikazati dvostruki integral
∫∫G
f(x, y) dx dy kao dva uzastopna
integrala (Slika 8).
Slika 8.
Resenje. Skup G je unija tri elemtarna skupa u odnosu na y-osu:
Ω1 = (x, y) : −2 ≤ x ≤ 0,−√
4− x2 ≤ y ≤√
4− x2
Ω2 = (x, y) : 0 ≤ x ≤ 2,−√4− x2 ≤ y ≤ −
√2x− x2,
Ω3 = (x, y) : 0 ≤ x ≤ 2,√
2x− x2 ≤ y ≤√
4− x2.
Prema Teoremi 2.7.3 sledi
∫∫G
f(x, y) dx dy =
0∫−2
dx
√4−x2∫
−√4−x2
f(x, y) dy +
2∫0
dx
−√2x−x2∫
−√4−x2
f(x, y) dy
+
2∫0
dx
√4−x2∫
√2x−x2
f(x, y) dy.

2.7. IZRACUNAVANJE INTEGRALA 43
Slika 9.
Primer 2.7.4. Izracunati integral (Slika 9)
I =
π/2∫0
dy
π/2∫y
sinx
xdx.
Resenje. Poznato je da neodredeni integral∫
sinxx dx ne moze biti izracunat
u konacnom obliku. Vazi limx→0
sinx
x= 1, odakle sledi da je funkcija (x, y) 7→
sinx
xogranicena i neprekidna na posmatranom skupu
G =(x, y) : 0 ≤ y ≤ π
2, y ≤ x ≤ π
2
=(x, y) : 0 ≤ x ≤ π
2, 0 ≤ y ≤ x
.
Prema Teoremi 2.7.3, vazi:
I =
π/2∫0
dy
π/2∫y
sinx
xdx =
∫∫G
sinx
xdx dy =
π/2∫0
dx
x∫0
sinx
xdy
=
π/2∫0
sinx
x
x∫0
dy
dx =
π/2∫0
sinx dx = 1.
2.7.2 Slucaj prostora Rn, n ≥ 3
Nije tesko dokazati rezultat analogan Teoremi 2.7.1 u prostoru vece dimen-zije.
44 GLAVA 2. INTEGRACIJA
Teorema 2.7.4. Neka su G =k∏i=1
(bi−ai) i K =m∏j=1
(di− ci) pravougaonici,
redom, u Rk i Rm. Neka je funkcija f integrabilna na pravougaoniku G×K.Ako za svako x ∈ G postoji integral
∫K
f(x, y) dy, tada vazi formula
∫G×K
f(x, y) dx dy =
∫G
dx
∫K
f(x, y) dy.
Definicija 2.7.2. Neka je G merljiv skup u Rn i neka su φ,ψ : G → Rneprekidne funkcije sa svojstvom φ(x) ≤ ψ(x) za svako x = (x1, . . . , xn) ∈G. Skup
Ω = (x1, . . . , xn, xn+1) : x ∈ G,φ(x) ≤ xn+1 ≤ ψ(x) ⊂ Rn+1
jeste elementaran skup u odnosu na osu xn+1.
Teorema 2.7.5. Elementaran skup Ω, odreden Definicijom 2.7.2 je merljivu prostoru Rn+1.
Teorema 2.7.6. Neka je Ω merljiv i elementaran skup u odnosu na osuxn+1, opisan u 2.21 Definiciji. Neka je (x, xn+1) 7→ f(x, xn+1) integrabilna
funkcija na Ω i neka za svako x ∈ G postoji interalψ(x)∫φ(x)
f(x, xn+1) dxn+1.
Tada vazi formula
∫Ω
f(x, xn+1) dx dxn+1 =
∫G
dx
ψ(x)∫φ(x)
f(x, xn+1) dxn+1.
Primer 2.7.5. Izracunati trostruki integral I =∫∫∫G
xyz dx dy dz ako je
skup G = [0, 1]× [2, 3]× [4, 5].
Resenje. Prema Teoremi 2.7.5 vazi
I =
1∫0
x dx
3∫2
y dy
5∫4
z dz =45
8.
Primer 2.7.6. Izracunati trostruki integral I =∫∫∫Ω
z dx dy dz na skupu
Ω ogranicenom ravnima x+ y + z = 1, x = 0, y = 0, z = 0 (Slika 2.7.2).
2.8. SMENA PROMENLJIVIH 45
Resenje. Skup Ω prikazan je na sledeci nacin:
Ω = (x, y, z) : 0 ≤ x ≤ 1, 0 ≤ y ≤ 1− x, 0 ≤ z ≤ 1− x− y.
Ω je elementaran u odnosu na z-osu. Neka je G skup u ravni ogranicenpravama x + y = 1, x = 0 i y = 0. Skup G je elementaran u odnosu nay-osu. Prema Teoremi 2.7.5 vazi∫∫∫
Ω
z dx dy dz =
∫∫G
dx dy
1−x−y∫0
z dz =1
2
∫∫G
(1− x− y)2 dx dy
=1
2
1∫0
dx
1−x∫0
(1− x− y)2 dy =1
2
1∫0
dx
1−x∫0
t2dt
=1
24.
2.8 Smena promenljivih
U opstem slucaju, potrebno je integral neke funkcije izracunati na skupukoji nije elementaran u odnosu na neku koordinatnu osu. Stoga se uvodismena promenljivih.
Skup G (G ⊂ Rn) je povezan ako za svake dve tacke A,B ∈ G, postojineprekidno preslikavanje γ : [a, b] → G sa svojstvom da je γ(a) = A iγ(b) = B. Otvoren i povezan skup jeste oblast. Ako je G oblast, onda je Gzatvorenje oblasti G.
Posmatramo preslikavanja definisana na oblastima u Rn. Neka jeG ⊂ Rnoblast i neka su definisane funkcije
(ξ1, . . . , ξn) 7→ φ1(ξ1, . . . , ξn), . . . , φn(ξ1, . . . , ξn)

46 GLAVA 2. INTEGRACIJA
za ξ = (ξ1, . . . , ξn) ∈ G. Tada je φ(ξ) = (φ1(ξ1, . . . , ξn), . . . , φn(ξ1, . . . , ξn)) ∈D, gde jeD neki novi skup u Rn. Preciznije, D je slika skupaG koordinatnimpreslikavanjima φ1, . . . , φn. Zahteva se da svi parcijalni izvodi prvog reda∂φi∂ξj
(i, j = 1, . . . , n) budu neprekidne funkcije na G. Takode, pretpostavlja
se da je jakobijan7 ovog koordinatnog preslikavanja razlicit od nule, odnosno
J =D(φ1, . . . , φn)
D(ξ1, . . . , ξn)=
∣∣∣∣∣∣∣∣∣∣
∂φ1
∂ξ1· · · ∂φ1
∂φn... · · ·
...∂φn∂ξ1
· · · ∂φn∂ξn
∣∣∣∣∣∣∣∣∣∣= 0
za svako (ξ1, . . . , ξn) ∈ G.Tada je preslikavanje φ = (φ1, . . . , φn) : G→ Rn regularnoa (ili dopustiva
transformacija odnosno smena). Preslikavanje φ je bijektivno iz G na D.Osim toga, φ je otvoreno preslikavanje, odnosno φ(G) = D, pri cemu je Doblast (videti dogovarajuce rezultate iz predmeta Matematicka analiza 3).
Formulisemo bez dokaza tvrdenje, koje ilustruje ulogu jakobijana pres-likavanja.
Teorema 2.8.1. Neka je φ : G → Rn regularno preslikavanje, pri cemu jeG oblast u Rn. Neka je Π n-dimenzionalna ”kocka“ u G stranice h, kojojpripada tacka M i neka je Π′ = φ(Π). Tada je Π′ merljiv skup u Rn i
limh→0
mn(Π′)
mn(Π)= lim
h→0
mn(Π′)
hn= |J(M)|
i ova konverencija je ravnomerna poM . Ovde je sa J(M) oznacena vrednostjakobijana preslikavanja φ u tacki M .
Sada dokazujemo vaznu teoremu o smeni promenljivih u visestrukomintegralu.
Teorema 2.8.2. Neka je G merljiva oblast u prostoru promenljivih ξ1, . . . , ξn,a D neka je merljiva oblast u prostoru promenljivih x1, . . . , xn. Neka jeφ = (φ1, . . . , φn) : G→ D regularno preslikavanje, odnosno
x1 = φ1(ξ1, . . . , ξn), . . . , xn = φn(ξ1, . . . , ξn),
J =D(φ1, . . . , φn)
D(ξ1, . . . , ξn)= 0, (ξ1, . . . , ξn) ∈ G.
7Carl Gustav Jacob Jacobi (1804-1851), nemacki matematicar

2.8. SMENA PROMENLJIVIH 47
Ako je (x1, . . . , xn) 7→ f(x1, . . . , xn) neprekidna funkcija na skupu D, ondavazi jednakost ∫
D
f(x1, . . . , xn) dx1 · · · dxn = (2.6)
=
∫G
f(x1(ξ1, . . . , ξn), . . . , xn(ξ1, . . . , ξn))|J | (2.7)
dξ1 · · · dξn. (2.8)
Dokaz. Poznato je da je kompozicija neprekidnih funkcija takode neprekidnafunkcija. Oblasti D i G su merljive, prema tome i ogranicene. Skupovi G i Dsu kompaktni. Neprekidne funkcije na kompaktnim skupovima jesu integra-bilne. Stoga oba integrala u (2.6) postoje. Dokazujemo njihovu jednakost.
Funkcija f je neprekidna na kompaktnom skupuD, te je stoga ogranicenana D. Postoji broj L > 0, tako da za svako x ∈ D vazi |f(x)| ≤ L. JakobijanJ je neprekidno preslikavanje na kompaktu G. Stoga postoji broj K, takoda za svako ξ ∈ G vazi |J(ξ)| ≤ K.
Posmatra se podela prostora Rn promenljivih ξ1, . . . , ξn pravama paralel-nim koordinatnim osama, pri cemu su susedne paralelne prave uvek na rasto-janju h. Sve kocke koje imaju neprazan presek sa G oznacimo sa G1, . . . , Gl.Skup 1, . . . , l podelimo na dva disjunktna skupa I i J na sledeci nacin:i ∈ I ako i samo ako Gi ∩ ∂G = ∅; j ∈ J ako i samo ako Gj ∩ ∂G = ∅. Sadaje ∂G ⊂
∪j∈J
Gj .
Neka je Di = φ(Gi), pri cemu je φ = (φ1, . . . , φn). Na osnovu Teoreme2.8.1 postoje tacke Mi ∈ Gi, i ∈ I, tako da vazi
mn(Di) = |J(Mi)|mn(Gi) + ϵ(h)mn(Gi),
pri cemu je limh→0
ϵ(h) = 0 ravnomerno poMi ∈ Gi. Neka je Ni = φ(Mi) ∈ Di,
i ∈ I.
Neka je ϵ > 0 proizvoljan broj. Na osnovu cinjenice mn(∂G) = 0 sledi
da se h moze odabrati dovoljno malo, tako da je mn
( ∪j∈J
Gj
)< ϵ
4LK . Tada
je ∣∣∣∣∣∣∑j∈J
f(Ni)|J(Mi)| ·mn(Gi)
∣∣∣∣∣∣ < ϵ
4. (2.9)
48 GLAVA 2. INTEGRACIJA
Ocigledno vazi∑i∈I
f(Ni)mn(Di) =∑i∈I
f(Ni)|J(Mi)|mn(Gi) +∑i∈I
f(Ni)ϵ(h)mn(Gi),
(2.10)Obzirom da je konvergencija ϵ(h) → 0 kada h→ 0 ravnomerna po Mi, sledida postoji dovoljno malo h, tako da je ispunjeno |ϵ(h)| < ϵ
4L·m(G) . Prematome, ∣∣∣∣∣∑
i∈If(Ni)ϵ(h)mn(Gi)
∣∣∣∣∣ ≤ Lϵ
4L ·mn(G)mn(G) =
ϵ
4. (2.11)
Na osnovu integrabilnosti funkcije f na skupuD sledi da postoji dovoljnomali broj h, sa svojstvom∣∣∣∣∣∣
∫D
f(x) dx−l∑
i=1
f(Ni) ·mn(Di)
∣∣∣∣∣∣ < ϵ
4. (2.12)
Sumal∑
i=1f(Ni)|J(Mi)| ·mn(Gi) je Rimanova suma koja odgovara inte-
gralu ∫G
f(φ(ξ))|J(ξ)| dξ. (2.13)
Preslikavanje φ : G → D je regularno, specijalno i neprekidno, te jeograniceno. Postoji broj S > 0, tako da za svako ξ ∈ G vazi |φ(ξ)| ≤S. Skupovi G1, . . . , Gl cine razbijanje skupa G dijametra h
√n (u n-
dimenzionalnom prostoru). Prema tome, dijametar razbijanja Gi tezinuli ako i samo ako h → 0. I familija D1, . . . , Dl cini rabijanje skupa Ddijametra ne veceg od Sh
√n. Prema tome, ako h → 0, onda i dijametar
razbijanja Di tezi nuli. Inverzno preslikavanje φ−1 : D → G je takodjeregularno (i neprekidno). Prema tome, ako dijametar razbijanja Di tezinuli, onda i h→ 0.
Regularno preslikavanje φ : G → D je otvoreno, odnosno slika tackeskupa G u tacke skupa D. Obzirom da je i inverzno preslikavanje regularno(samim tim i otvoreno), sledi da φ preslikava rub skupa G na rub skupa D.Prema tome, skup E =
∪j∈J
Dj sadrzi rub skupa D i m(E) ≤ Mnhn(√n)n.
Za dato ϵ > 0 postoji dovoljno malo h, tako da vazi m(E) ≤ ϵ4L . Sada je∣∣∣∣∣∣
∑j∈J
f(Nj) ·m(Dj)
∣∣∣∣∣∣ < ϵ
4. (2.14)

2.8. SMENA PROMENLJIVIH 49
Sada dolazimo do procene:∣∣∣∣∣∣∫D
f dx−l∑
i=1
f(Ni)|J(Mi)| ·mn(Gi)
∣∣∣∣∣∣ ≤≤
∣∣∣∣∣∣∫D
f dx−l∑
i=1
f(Ni)mn(Di)
∣∣∣∣∣∣++
∣∣∣∣∣l∑
i=1
f(Ni)mn(Di)−l∑
i=1
f(Ni)|J(Mi)|mn(Gi)
∣∣∣∣∣≤
∣∣∣∣∣∣∫D
f dx−l∑
i=1
f(Mi)m(Di)
∣∣∣∣∣∣++
∣∣∣∣∣∑i∈I
f(Ni)m(Di)−∑i∈I
f(Ni)|J(Mi)|mn(Gi)
∣∣∣∣∣+
∣∣∣∣∣∣∑j∈J
f(Nj)mn(Dj)
∣∣∣∣∣∣+∣∣∣∣∣∣∑j∈J
f(Nj)|J(Mj)|mn(Gj)
∣∣∣∣∣∣≤ ϵ
4+ϵ
4+ϵ
4+ϵ
4= ϵ
Pri tome, prva apsolutna vrednost je manja od ϵ4 na osnovu (2.12), druga
apsolutna vrednost je manja od ϵ4 na osnovu formule (2.10) i nejednakosti
(2.11). Treca apsolutna vrednost je manja od ϵ4 na osnovu nejednakosti
(2.14). Cetvrta apsolutna vrednost je manja od ϵ4 na osnovu nejednakosti
(2.9).Sada, imajuci u vidu Rimanovu sumu integrala u (2.13), sledi trazena
jednakost integrala ∫D
f dx =
∫G
f(φ(ξ))|J(ξ)| dξ.
Prethodna teorema ima primene u mnogim konkretnim slucajevima.
2.8.1 Polarna smena u ravni
Dobro je poznato da svaka tacka P = (x, y) = (0, 0) u ravni na jedinstvennacin moze biti prikazana koriscenjem polarnog radijusa i polarnog ugla.

50 GLAVA 2. INTEGRACIJA
Polarni radijus je intenzitet vektora−−→OP , a polarni ugao je ugao koji pozitivni
deo x-ose zaklapa sa vektorom−−→OP , pocev od pozitivnog dela x-ose suprotno
kretanju kazaljke na casovniku (Slika 10).
Slika 10.
U ovom slucaju za svaku tacku (x, y) = (0, 0) postoje jedinstveni brojevir > 0 i 0 ≤ φ < 2π, tako da vazi
x = r cosφ, y = r sinφ.
Naravno, ako je x = y = 0, onda je r = 0, a φ moze biti bilo koji ugao.Inverzne transformacije jesu
r =√x2 + y2, φ = arctg
y
x.
Jakobijan uvedenog preslikavanja jeste
J =
∣∣∣∣cosφ −r sinφsinφ r cosφ
∣∣∣∣ = r.
Ocigledno je J = 0 zbog uslova r > 0.

2.8. SMENA PROMENLJIVIH 51
Slika 11.
Ako je skup G cela ravan sa izuzetkom koordinatnog pocetka, analizi-ramo sta je skup D, odnosno domen promenljivih r i φ. Ocigledno, r-osapripada skupu G, ali ne i ostali deo ruba (Slika 11). Ovaj nedostatak necebiti presudan prilikom izracunavanja visestrukih integrala. Razlog lezi ucinjenici da je povrsina tacke ili duzi jednaka nuli.
Primer 2.8.1. Ispitati koju oblast u prostoru promenljivih r i φ polarnasmena preslikava na krug G : x2+y2 ≤ R2. Koristeci ovu smenu, izracunatiintegral
I =
∫∫G
(x2 + y2) dx dy.
Resenje. U nejednakosti x2+ y2 ≤ R, kojom je odredena unutrasnost krugazamenimo promenljive x i y preko r i φ. Proizilazi r2 ≤ R2. Pri tome zapromenljivu φ nema nikakvih ogranicenja, odnosno uslovi koji opisuju skupG u ovom primeru jesu 0 < r ≤ R i 0 ≤ φ < 2π. Drugim recima, vaziD = (r, φ) : 0 < r ≤ R, 0 ≤ φ < 2π. Sada, koristeci Teoremu 2.8.2 osmeni promenljivih, proizilazi da vazi
I =
∫∫D
(r2 cos2 φ+ r2 sin2 φ)r dr dφ =
2π∫0
dφ
R∫0
r2 · r dr = 1
2R4π.
U ovom primeru ignorisan je centar kruga, u koju se ne slika ni jedna tackaskupa D, zbog uslova r > 0. Medutim, to u ovom slucaju nije od pre-sudnog znacaja za racunanje integrala. Naime, integral posmatrane funkcije

52 GLAVA 2. INTEGRACIJA
(x, y) 7→ f(x, y) = x2 + y2 na skupu G moze se izracunati kao zbir inte-grala na skupu G1 i na skupu G2. Pri tome G1 neka sadrzi samo centarkruga, odnosno G1 = (0, 0), a G2 = G \ G1. Kako je mera skupa G1
jednaka nuli, to ce i integral funkcije po tom skupu biti jednak nuli, i do-voljno je posmatrati integral funkcije f na skupu G2. Sada je slika skupaD = (r, φ) : 0 < r ≤ R, 0 ≤ φ < 2π polarnom smenom jednaka skupuG2. Kao sto se vidi, izuzece skupa G1 ne utice na vrednost integrala. Ova”nedorecenost“ koristi se u svim narednim primerima bez posebnog obra-zlozenja.
2.8.2 Uopstena polarna smena
Uopstene polarne koordinate se koriste kada je polazni domen integracijeelipsa, a ne krug. Posmatra se preslikavanje
x = ar cosφ, y = br sinφ, 0 ≤ φ < 2π, r > 0,
gde su a, b neke konstante razlicite od nule. Tada je jakobijan preslikavanja
J =
∣∣∣∣a cosφ −ar sinφb sinφ br cosφ
∣∣∣∣ = abr = 0.
Geometrijska interpretacija ove transforamcije slicna je interpretaciji polarnesmene. Naime, ako su date vrednosti za x i y, pri cemu je (x, y) = (0, 0),onda su jedinstveni r i φ odredeni na sledeci nacin:
r =
√x2
a2+y2
b2> 0, φ = arctg
ya
xb∈ [0, 2π).
Obrnuto, ako su poznate vrednosti r > 0 i φ ∈ [0, 2π), onda je formulamax = ar cosφ, y = br sinφ odredena jedinstvena tacka ravni sa izuzetkomkoordinatnog pocetka. Kao i u slucaju polarnih koordinata, izuzece koordi-natnog pocetka nece predstavljati poteskoce u izracunavanju integrala.
U izvesnim specijalnim slucajevima koristi se uopstena polarna smena
x = arα cosβ φ, y = brα sinβ φ, φ ∈ [0, 2π), r > 0 (a, b, α, β = 0).
Primer 2.8.2. Izracunati integral I =∫∫G
√x2
a2+ y2
b2dx dy, gde je skup G
unutrasnjost elipse, odnosno G : x2
a2+ y2
b2≤ 1, a, b > 0.
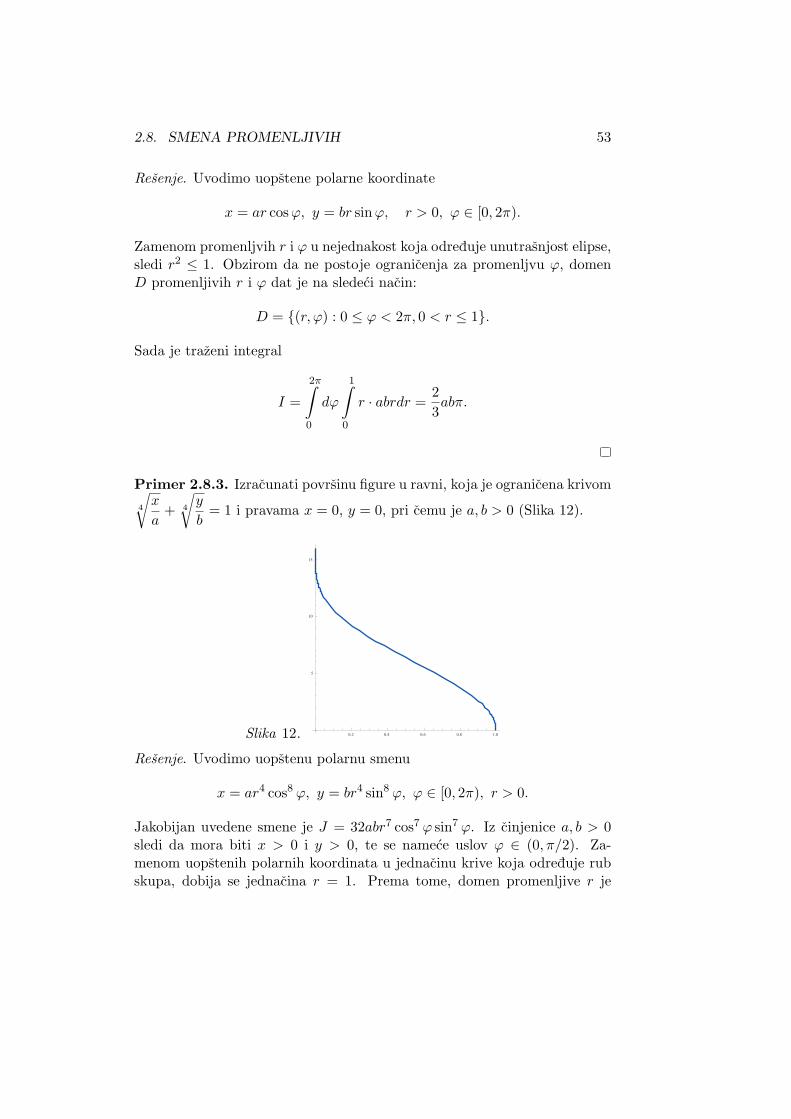
2.8. SMENA PROMENLJIVIH 53
Resenje. Uvodimo uopstene polarne koordinate
x = ar cosφ, y = br sinφ, r > 0, φ ∈ [0, 2π).
Zamenom promenljvih r i φ u nejednakost koja odreduje unutrasnjost elipse,sledi r2 ≤ 1. Obzirom da ne postoje ogranicenja za promenljvu φ, domenD promenljivih r i φ dat je na sledeci nacin:
D = (r, φ) : 0 ≤ φ < 2π, 0 < r ≤ 1.
Sada je trazeni integral
I =
2π∫0
dφ
1∫0
r · abrdr = 2
3abπ.
Primer 2.8.3. Izracunati povrsinu figure u ravni, koja je ogranicena krivom
4
√x
a+ 4
√y
b= 1 i pravama x = 0, y = 0, pri cemu je a, b > 0 (Slika 12).
Slika 12.
Resenje. Uvodimo uopstenu polarnu smenu
x = ar4 cos8 φ, y = br4 sin8 φ, φ ∈ [0, 2π), r > 0.
Jakobijan uvedene smene je J = 32abr7 cos7 φ sin7 φ. Iz cinjenice a, b > 0sledi da mora biti x > 0 i y > 0, te se namece uslov φ ∈ (0, π/2). Za-menom uopstenih polarnih koordinata u jednacinu krive koja odreduje rubskupa, dobija se jednacina r = 1. Prema tome, domen promenljive r je

54 GLAVA 2. INTEGRACIJA
interval (0, 1). U ovom domenu promenljivih r i φ jakobijan preslikavanjaje pozitivan. Prema tome, trazena povrsina jednaka je sledecem integralu:
I = 32ab
π/2∫0
cos7 φ sin7 φ dφ
1∫0
r7dr =ab
70.
2.8.3 Cilindricna smena u trostrukom integralu
Cilindricne koordinate u prostoru R3 predstavljaju neposredno uopstenjepolarnih koordinata. Preciznije, u ravni promenljivih x, y uvodi se polarnasmena, a promenljiva z ostaje nepromenjena:
x = r cosφ, y = r sinφ, z = ξ,
pri cemu je
0 ≤ φ < 2π, r > 0, ξ ∈ R.
Lako utvrdujemo da je za ovako uzet domen promenljive (r, φ, ξ) jakobijanpreslikavanja dat na sledeci nacin:
J =
∣∣∣∣∣∣cosφ −r sinφ 0sinφ r cosφ 00 0 1
∣∣∣∣∣∣ = r > 0.
Geometrijska interpretacija ovih smena je sledeca. Neka je P tacka u trodi-menzionalnom prostoru sa koordinatama (x, y, z), neka je P ′ ortogonalnaprojekcija tacke P na ravan xOy. Tada je ξ jednako z koordinati tacke P , rje rastojanje tacke P ′ od koordinatnog pocetka, a φ je ugao meren od pozi-
tivnog dela x-ose do vektora−−→OP ′, suprotno kretanju kazaljke na casovniku
(Slika 13).

2.8. SMENA PROMENLJIVIH 55
Slika 13.
Moguce je uvesti uopstenu cilindricnu smenu
x = ar cosφ, y = br sinφ, z = ξ, r > 0, φ ∈ [0, 2π), ξ ∈ R,
za proizvoljne a, b = 0. Tada je jakobijan preslikavanja J = abr.
U izvesnim slucajevima uvodi se smena oblika
x = arα cosβ φ, y = brα sinβ φ, z = ξ, r > 0, φ ∈ [0, 2π), ξ ∈ R (a, b, α, β = 0).
Primer 2.8.4. Naci zapreminu tela G, cija je granica data jednacinom(x2 + y2 + z2)2 = x2 + y2 (Slika 14).
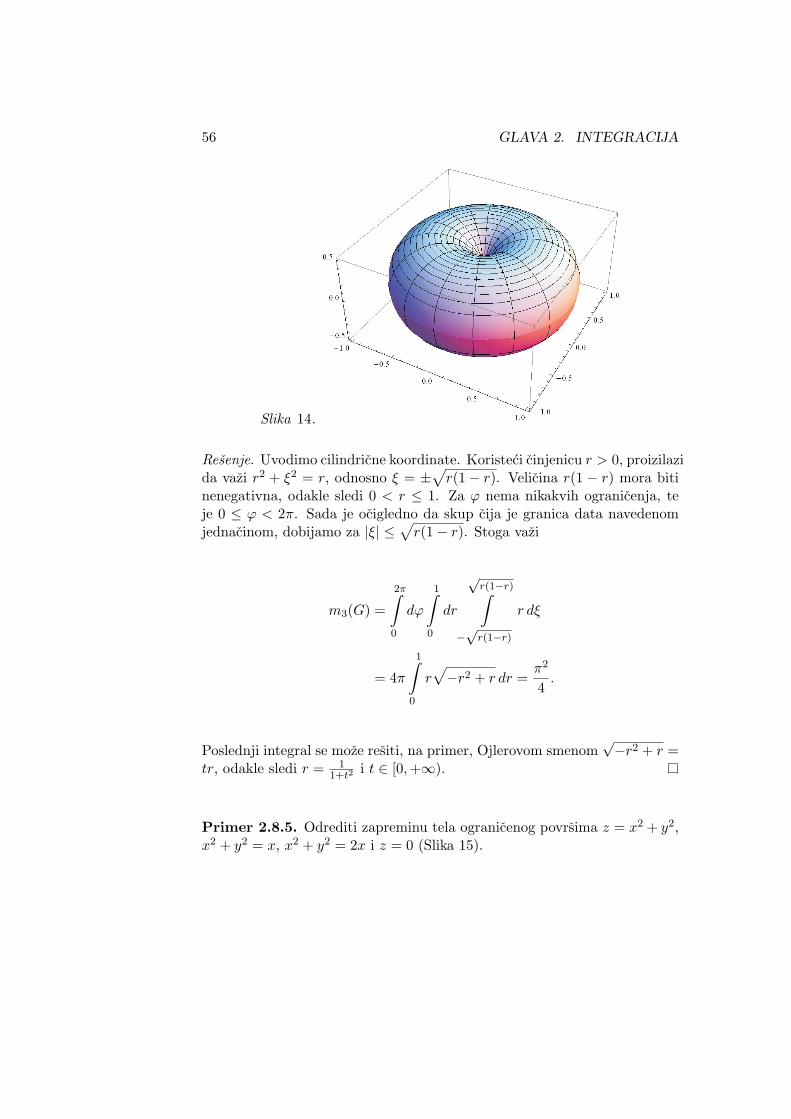
56 GLAVA 2. INTEGRACIJA
Slika 14.
Resenje. Uvodimo cilindricne koordinate. Koristeci cinjenicu r > 0, proizilazida vazi r2 + ξ2 = r, odnosno ξ = ±
√r(1− r). Velicina r(1 − r) mora biti
nenegativna, odakle sledi 0 < r ≤ 1. Za φ nema nikakvih ogranicenja, teje 0 ≤ φ < 2π. Sada je ocigledno da skup cija je granica data navedenomjednacinom, dobijamo za |ξ| ≤
√r(1− r). Stoga vazi
m3(G) =
2π∫0
dφ
1∫0
dr
√r(1−r)∫
−√r(1−r)
r dξ
= 4π
1∫0
r√
−r2 + r dr =π2
4.
Poslednji integral se moze resiti, na primer, Ojlerovom smenom√−r2 + r =
tr, odakle sledi r = 11+t2
i t ∈ [0,+∞).
Primer 2.8.5. Odrediti zapreminu tela ogranicenog povrsima z = x2 + y2,x2 + y2 = x, x2 + y2 = 2x i z = 0 (Slika 15).

2.8. SMENA PROMENLJIVIH 57
Slika 15.
Resenje. Uvodimo cilindricnu smenu x = r cosφ, y = r sinφ, z = ξ, pricemu je r > 0, ξ ∈ R i φ ∈ (−π/2, π/2). Zamenom cilindricnih koordinata ujednacine povrsi, dolazimo do sledecih jednacina u polarnom obliku: ξ = r2,r = cosφ, r = 2 cosφ, ξ = 0. Iz prve i poslednje jednacine proizilaze granicepromenljive ξ: ξ ∈ (0, r2). Iz druge (kao i trece) jednacine, iz uslova r > 0sledi uslov φ ∈ (−π/2, π/2). Na kraju, iz druge i trece jednacine proizilaziuslov za promenljivu r: r ∈ (cosφ, 2 cosφ). Prema tome, trazena zapreminajednaka je integralu
I =
π/2∫−π/2
dφ
2 cosφ∫cosφ
r dr
r2∫0
dξ =45π
32.
Primer 2.8.6. Izracunati zapreminu tela koje je ograniceno povrsimax2
a2+
y2
b2+z2
c2= 1 i
x2
a2+y2
b2=z
c, pri tome se ima u vidu deo u unutrasnjosti
paraboloida (a, b, c > 0) (Slika 16).
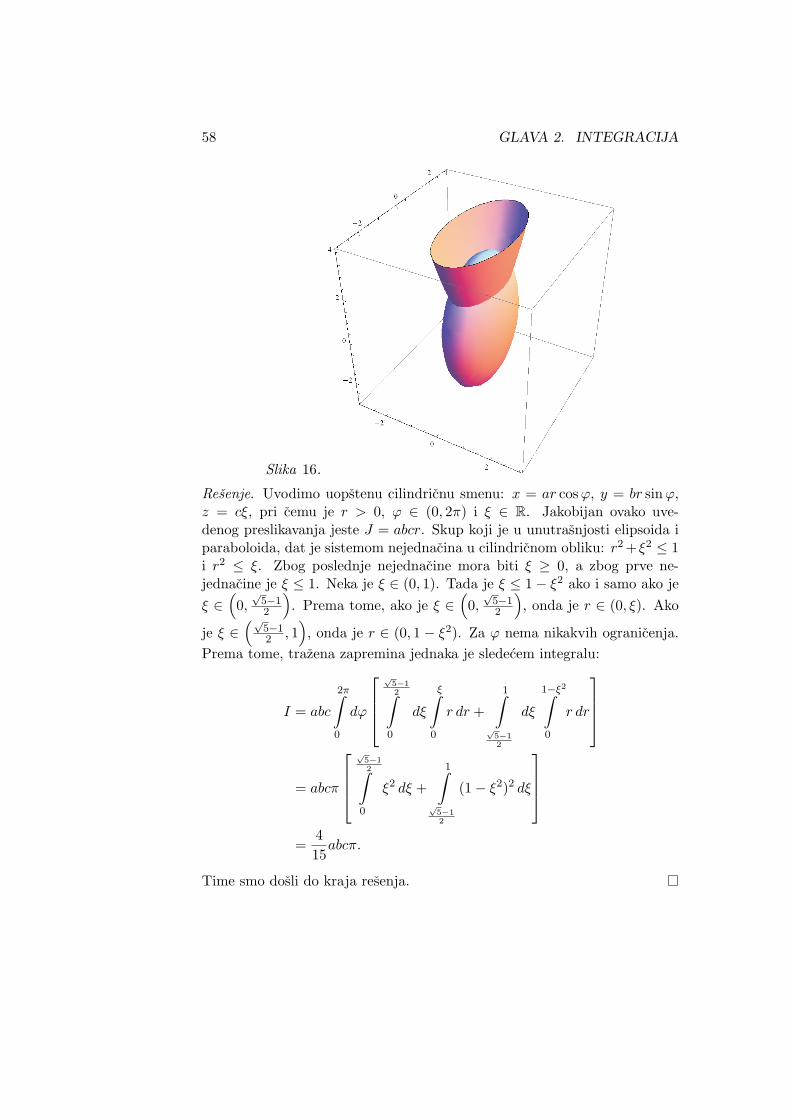
58 GLAVA 2. INTEGRACIJA
Slika 16.
Resenje. Uvodimo uopstenu cilindricnu smenu: x = ar cosφ, y = br sinφ,z = cξ, pri cemu je r > 0, φ ∈ (0, 2π) i ξ ∈ R. Jakobijan ovako uve-denog preslikavanja jeste J = abcr. Skup koji je u unutrasnjosti elipsoida iparaboloida, dat je sistemom nejednacina u cilindricnom obliku: r2+ξ2 ≤ 1i r2 ≤ ξ. Zbog poslednje nejednacine mora biti ξ ≥ 0, a zbog prve ne-jednacine je ξ ≤ 1. Neka je ξ ∈ (0, 1). Tada je ξ ≤ 1− ξ2 ako i samo ako je
ξ ∈(0,
√5−12
). Prema tome, ako je ξ ∈
(0,
√5−12
), onda je r ∈ (0, ξ). Ako
je ξ ∈(√
5−12 , 1
), onda je r ∈ (0, 1 − ξ2). Za φ nema nikakvih ogranicenja.
Prema tome, trazena zapremina jednaka je sledecem integralu:
I = abc
2π∫0
dφ
√
5−12∫
0
dξ
ξ∫0
r dr +
1∫√
5−12
dξ
1−ξ2∫0
r dr
= abcπ
√
5−12∫
0
ξ2 dξ +
1∫√5−12
(1− ξ2)2 dξ
=
4
15abcπ.
Time smo dosli do kraja resenja.

2.8. SMENA PROMENLJIVIH 59
2.8.4 Sferna smena u trostrukom integralu
Mnogi trostruki integrali izracunavaju se uvodenjem sferne smene. Neka je
x = r cosφ sinψ, y = r sinφ sinψ, z = r cosψ,
r > 0, 0 ≤ φ < 2π, 0 < ψ < π.
Jakobijan ove smene je
J =
∣∣∣∣∣∣cosφ sinψ −r sinφ sinψ r cosφ cosψsinφ sinψ r cosφ sinψ r sinφ cosψ
cosψ 0 −r sinψ
∣∣∣∣∣∣ = −r2 sinψ = 0.
Prema tome, |J | = r2 sinψ. Geometrijsko tumacenje ove smene je sledece.Ako je P tacka u prostoru R3 sa koordinatama (x, y, z), neka je P ′ ortog-onalna projekcija tacke P na Oxy ravan. Tada je r rastojanje tacke P odkoordinatnog pocetka O, φ je ugao u ravni Oxy meren pocev od pozitivnog
dela x-ose do vektora−−→OP ′ suprotno kretanju kazaljke na casovniku, a ψ je
ugao koji vektor−−→OP zaklapa sa pozitivnim delom z-ose, meren pocev od
pozitivnog dela z-ose.
Primer 2.8.7. Izracunati masu kugle x2 + y2 + z2 ≤ a2, ako je raspodelagustine data funkcijom f(x, y, z) =
√x2 + y2 + z2.
Dokaz. Ako je skup na kome se vrsi integracija – kugla, onda je to karakter-istican primer potrebe za uvodenjem sfernih koordinata. U ovom primeruprelaskom na sferne koordinate sledi da je funkcija raspodele gustine
f(x(r, φ, ψ), y(r, φ, ψ), z(r, φ, ψ)) = r.
Zamenom sfernih koordinata u nejedancinu koja u Dekartovim koordinatamaodreduje kuglu, sledi da je nejednacina koja u sfernim koordinatama opisujekuglu, data kao r2 ≤ a2, odnosno r ≤ a. Pri tome nema nikakvih dodatnihogranicenja za φ i ψ. Stoga se masa tela racuna na sledeci nacin:
I =
2π∫0
dφ
π∫0
dψ
a∫0
r3 sinψdr = a4π.

60 GLAVA 2. INTEGRACIJA
2.9 Nesvojstveni integrali
Od interesa je razmatrati nesvojstvene integrale. Integral moze biti nesvo-jstven u dva slucaja. Moguce je da domen integracije jeste neogranicen skup,ili je funkcija neogranicena u okolini neke tacke ruba domena.
Neka je G oblast u Rm, m ≥ 2. Niz otvorenih i izmerljivih skupova (Gn)n
je monotoni pokrivac otvorenog skupa G, ako je G =∞∪k=1
Gk i Gn ⊂ Gn+1
za svako n ∈ N.
Definicija 2.9.1. Neka je f funkcija definisana na otvorenom skupu G,tako da je f integrabilna na svakom merljivom (prema tome i ogranicenom)podskupu od G. Ako postoji granicna vrednost
limn→∞
∫Gn
f(x) dx = I
za svaki monotoni pokrivac (Gn)n skupa G, onda je I nesvojstven visestrukiintegral funkcije f na skupu G, u oznaci
I =
∫G
f ≡∫G
f(x) dx.
Vazno je uociti da uvedena definicija vazi samo u slucaju m ≥ 2.Naime, Definicija 2.9.1 na pravoj ne poklapa se sa ranijim pojmom nesvo-jstvenog integrala funkcije jedne promenljive, vec je specijalnija. Razloglezi u cinjenici da je monotoni pokrivac u Definiciji 2.9.1 proizvoljan, dok uslucaju funkcija jedne promenljive to nije bio slucaj. Na primer, za funkcijejedne promenljive posmatrana je granicna vrednost oblika
+∞∫a
f(x) dx = limn→+∞
n∫a
f(x) dx (2.15)
i radi se o specijalnom monotonom pokrivanju intervala (a,+∞) skupovimaoblika Gn = (a, n), n ∈ N.
Ovo je sustinska razlika u integraciji funkcija vise promenljivih u odnosuna integraciju funkcija jedne promenljive.
Navodimo i primer kojim ilustrujemo prethodna razmatranja.
Primer 2.9.1. Pokazati da je integral+∞∫0
f(x) dx, gde je
f(x) =(−1)n+1
n, x ∈ [n− 1, n), n ∈ N,
2.9. NESVOJSTVENI INTEGRALI 61
konvergentan integral u nesvojstvenom smislu na pravoj (odnosno u smislugranicne vrednosti (2.15) ), ali nije konvergentan u smislu Definicije 2.9.1.
Resenje. Prema Kosijevom kriterijumu, navedeni integral kovergira u smislu
granicne vrednosti (2.15), ako i samo ako konvergira red∑ (−1)n+1
n . Nar-avno, pomenuti red je uslovno konvergentan, i stoga integral postoji u smislugranicne vrednosti (2.15).
Sa druge strane, prema Rimanovoj teoremi, postoji neki raspored clanova
reda∑ (−1)n+1
n , tako da je suma novog reda jednaka +∞. Neka je to red∑an sa novim rasporedom clanova. Ovom redu odgovara novi monotoni
pokricac skupa (0,+∞). Racunajuci granicnu vrednost integrala po novommonotonom pokrivacu, sledi da je vrednost integrala u smislu 2.41 Definicijejednaka +∞. Prema tome, funkcija nije integrabilna u smislu Definicije2.9.1.
U ovom primeru eventualno prihvatanje mogucih granicnih vrednosti+∞ ili−∞ nije od posebnog znacaja, stoga sto promena monotonog pokrivacadovodi do promene granicne vrednosti.
Sledeci vazan rezultat je ocekivan i posledica je proizvoljnog izbora mo-notonog pokrivaca otvorenog skupa G.
Teorema 2.9.1. Funkcija f je integrabilna na otvorenom skupu G ⊂ Rm,m ≥ 2, ako i samo ako je |f | integrabilna na G.
Teorema 2.9.1 je sustinski razlicita od odgovarajuceg rezultata za inte-grale funkcija jedne promenljive. U slucaju nesvojstvenog integrala funkcijejedne promenljive, iz apsolutne konvergencije integrala sledi obicna konver-gencija ovog integrala, dok obrnuto ne vazi.
Na kraju, navodimo ocekivano tvrdenje za nenegativne funkcije.
Teorema 2.9.2. Ako je f nenegativna funkcija na otvorenom skupu G ⊂Rm, tada za svaki monotoni pokrivac (Gn)n skupa G postoji lim
n→∞
∫Gn
f(x) dx
kao konacan broj, ili je ova granicna vrednost jednaka +∞.
Primer 2.9.2. Ispitati konvergenciju i odrediti vrednost integrala
I =
∫∫R2
e−(x2+y2) dx dy.
Resenje. Funkcija f(x, y) = e−(x2+y2) je nenegativna i stoga je integralkonvergentan, ili je njegova vrednost +∞. Skupovi Gn = (x, y) : x2+ y2 <

62 GLAVA 2. INTEGRACIJA
n2 cine monotoni pokrivac ravni R2. Sledi da vazi (koriscenjem smenex = r cosφ, y = r sinφ)
In =
∫∫Gn
e−(x2+y2) dx dy =
2π∫0
dφ
n∫0
re−r2dr = π(1− e−n
2)
i
I = limn→∞
In = π.
Prema tome, polazni integral je konvergentan i njegova vrednost je jednakaπ.
Primer 2.9.3. Dokazati da vazi+∞∫−∞
e−x2dx =
√π (Gausov integral8; Ojler9-
Puasonov10 integral).
Resenje. Neka je Fn = (−n, n) × (−n, n) monotoni pokrivac skupa R2.Prema prethodnom primeru je
π = limn→∞
∫∫Fn
e−(x2+y2) dx dy = limn→∞
+n∫−n
e−x2dx
+n∫−n
e−y2dy
= limn→∞
+n∫−n
e−x2dx
2
.
Prema tome,+∞∫−∞
e−x2dx =
√π.
2.10 Pojmovi u mehanici
⋆U ovoj sekciji povezujemo integrale i razne pojmove u mehanici.
8Johann Carl Friedrich Gauss (1777-1855), nemacki matematicar i fizicar9Leonhard Euler (1707-1783), svajcerski matematicar i fizicar
10Simeon Denis Poisson (1781-1840), francuski matematicar, geometar i fizicar
2.10. POJMOVI U MEHANICI 63
2.10.1 Moment inercije materijalne ravne figure
Neka je M materijalna tacka mase m i neka je O proizvoljna tacka prostora.Moment inercije materijalne tacke M u odnosu na tacku O jeste velicinaI = mr2, gde je r rastojanje izmedu tacaka O i M .
Ako je dat sistem materijalnih tacaka M1, . . . ,Mn, cije su mase redomjednake m1, . . . ,mn, onda je moment inercije ovog sistema materijalnih
tacaka jednak I =n∑i=1
mir2i , gde je ri rastojanje tacke Mi od tacke O.
Neka je G materijalna ravna figura pozitivne mase. Smatramo da jefigura u ravni Oxz. Neka je funkcija (x, y) 7→ f(x, y) gustine raspodelemase ravne figure G. Funkcija f je nenegativna i neprekidna na G. Neka jeT = G1, . . . , Gn proizvoljno razbijanje skupa G i neka su Mi = (xi, yi) ∈Gi proizvoljne tacke. Elementaran moment inercije na delu Gi u odnosuna koordinatni pocetak O jeste proizvod kvadrata rastojanja tacke Mi odkoordinatnog pocetka i mase tela Gi. Masa tela Gi jednaka je proizvodu gus-tine i povrsine (degenerisane dvodimenzionalne zapremine). Prema tome,∆Ii = (x2i + y2i )f(xi, yi) · m2(Gi). Po analogiji sa sistemom od konacnomnogo materijalnih tacaka, moment inercije tela G u odnosu na koordinatnipocetak priblizno je jednak sumi
n∑i=1
(x2i + y2i )f(xi, yi) ·m2(Gi).
Odstupanje od tacnog momenta inercije je utoliko manje ukoliko je dijametarpodele manji. Obzirom da je prethodna suma u stvari Rimanova sumafunkcije (x, y) 7→ (x2 + y2)f(x, y) na skupu G, sledi da je moment inercijetela G u odnosu na koordinatni pocetak jednak
IO =
∫∫G
(x2 + y2)f(x, y) dx dy.
Moment inercije u odnosu na koordinatni pocetak naziva se i polarni momentinercije.
Analogno se moze definisati moment inercije materijalne ravne figure uodnosu na bilo koju koordinatnu osu. Tada se koristi kvadrat rastojanja odte koordinatne ose. Integrali
Ix =
∫∫G
y2f(x, y) dx dy i Iy =
∫∫G
x2f(x, y) dx dy
jesu momenti inercije ravne figure G u odnosu na x- i y-koordinatne oseredom.

64 GLAVA 2. INTEGRACIJA
Primer 2.10.1. Naci moment inercije ravne materijalne figure G u odnosuna obe ose i koordinatni pocetak, ako je G ogranicena krivama y2 = x− 1,x = 2 i y = 0, u delu ravni y ≥ 0, a gustina raspodele mase data je funkcijomf(x, y) = y.
Resenje. Presek krivih koje ogranicavaju oblast G jesu tacke A(1, 0), B(2, 0)i C(2, 1). Momenti inercije tela G u odnosu na koordinantne ose jesu
Iy =
1∫0
y dy
2∫y2+1
x2 dx =17
24, Ix =
1∫0
y3 dy
2∫y2+1
dx =1
12,
a moment inercije u odnosu na koordinantni pocetak jeste
IO = Ix + Iy =19
24.
2.10.2 Elipsa inercije
Neka je G ravno telo u koordinatnoj ravni Oxy, cija je gustina raspodelemase data nenegativnom neprekidnom funkcijom (x, y) 7→ f(x, y) na skupuG. Neka je ℓ prava koja prolazi kroz koordinatni pocetak i zaklapa ugao φsa pozitivnim delom x-ose. Tada je jednacina prave ℓ data kao y = x tgφ,odnosno
x sinφ− y cosφ = 0.
Neka je M(x, y) proizvoljna tacka ravni. Lako se proverava da je rastojanjetacke M od prave ℓ jednako
r = |x sinφ− y cosφ|.
Moment inercije tela G u odnosu na pravu ℓ jednak je
Iℓ =
∫∫G
(x sinφ− y cosφ)2f(x, y) dx dy
= sin2 φ
∫∫G
x2f(x, y) dx dy − 2 sinφ cosφ
∫∫G
xyf(x, y) dx dy
+ cos2 φ
∫∫G
y2f(x, y) dx dy
= Iy sin2 φ− 2Ixy sinφ cosφ+ Ix cos
2 φ,

2.10. POJMOVI U MEHANICI 65
uz prirodnu oznaku Ixy =∫∫G
xyf(x, y) dx dy. Velicina Iℓ definisana je in-
tegralom nenegativne funkcije, te je Iℓ > 0 (osim u ekstremnim slucajevimakoji sada nisu od interesa). Stoga se prethodna formula moze zapisati uobliku
1 = Ix
(cosφ√Iℓ
)2
− 2Ixy
(sinφ√Iℓ
)(cosφ√Iℓ
)+ Iy
(sinφ√Iℓ
)2
. (2.16)
Uocimo na pravoj ℓ tacku A(x, y), koja je na rastojanju od O jednakom1√Iℓ. Polozaj tacke A uslovljen je pravom ℓ, odnosno uslovljen je uglom
φ. Trazimo geometrijsko mesto svih takvih tacaka A u zavisnosti od uglaφ. Drugim recima, rotiramo pravu ℓ oko koordinatnog pocetka i pratimokretanje tacke A. Ocigledno, koordinate (x, y) tacke A zadovoljavaju uslove:
x =cosφ√Iℓ, y =
sinφ√Iℓ.
Na osnovu jednakosti 2.16 sledi rezultat
1 = x2Ix − 2xyIxy + y2Iy. (2.17)
Velicine Ix, Iy i Ixy ne zavise od ugla φ, vec samo koordinate (x, y) takceA. Prema tome geometrijsko mesto svih tacaka A(x, y), koje se dobijapromenom ugla φ, jeste kriva drugog reda, cija je jednacina data formu-lom 2.17.Formulom
⟨s, t⟩ =∫∫G
s(x, y)t(x, y)f(x, y) dx dy
definisan je skalarni proizvod u skupu C(G) svih neprekidnih funkcija nakompatu G. Na osnovu nejednakosti Kosi11-Bunjakovskog12-Svarca13:
|⟨s, t⟩| ≤ ∥s∥ · ∥t∥,
pri cemu je (videti 1.32 Primer iz prve glave)
∥s∥ =
∫∫G
(s(x, y))2f(x, y) dx dy
12
.
11Augustin-Louis Cauchy (1789-1857), francuski matematicar12Viktor Yakovych Bunyakovsky (1804-1889), ukrajinsko-ruski matematicar)13Karl Hermann Amandus Schwarz (1843-1921), nemacki matematicar

66 GLAVA 2. INTEGRACIJA
Na osnovu ove nejednakosti sledi procena∣∣∣∣∣∣∫∫G
xyf(x, y) dx dy
∣∣∣∣∣∣2
≤
∫∫G
x2f(x, y) dx dy
∫∫G
y2f(x, y) dx dy
,koja se krace moze zapisaiti
IxIy − I2xy > 0.
Prema tome, diskrimanta krive (2.49.2) je pozitivna i ta kriva je elipsa.Kriva (2.49.2) je elipsa inercije materijalnog ravnog tela G.
2.10.3 Moment inercije materijalne figure
Neka jeM(x, y, z) tacka u prostoru mase m. Tada su momenti inercije tackeM u odnosu na sve tri koordinatne ose i koordinatni pocetak dati formulama:
Ix = (y2 + z2)m, Iy = (x2 + z2)m, Iz = (x2 + y2)m,
IO = (x2 + y2 + z2)m.
Neka je dat konacan sistem tacakaM1(x1, y1, z1), . . . ,Mn(xn, yn, zn), cijesu mase redom m1, . . . ,mn. Kvadrati njihovih rastojanja od, na primer, oseOx jesu y21 + z21 , . . . , y
2n + z2n. Tada je moment inercije ovog sistema tacaka
u odnosu na x-osu jednak
Ix =
n∑i=1
(y2i + z2i )mi.
Neka je telo G predstavljena kao merljiva oblast u prostoru. Gustinaraspodele telaG data je funkcijom f(x, y, z) koja je nenegativna i neprekidnana G. Po analogiji sa ranijim razmatranjima, momenti inercije oblasti G uodnosu na koordinatne ose i kordinatni pocetak jesu redom:
Ix =
∫∫∫G
(y2 + z2)f(x, y, z) dx dy dz,
Iy =
∫∫∫G
(x2 + z2)f(x, y, z) dx dy dz
Iz =
∫∫∫G
(x2 + y2)f(x, y, z) dx dy dz
IO =
∫∫∫G
(x2 + y2 + z2)f(x, y, z) dx dy dz.

2.10. POJMOVI U MEHANICI 67
Primer 2.10.2. Dato je telo oblika valjka visine 2h, poluprecnika osnoveR, konstantne gustine c. Izracunati moment inercije valjka u odnosu na osuvaljka, kao i na pravu koja polovi osu valjka i normalna je na nju.
Resenje. Jednostavnosti radi, neka je srediste valjka koordinatni pocetak, aosa valjka neka je na z-osi. Sada treba izracunati moment inercije valjka uodnosu na z-osu i u odnosu na bilo koju pravu u ravni Oxy, koja prolazikroz koordinatni pocetak: na primer u odnosu na x-osu. Tada je
Iz = c
∫∫∫G
(x2 + y2) dx dy dz.
Uvedimo cilindricne koordinate: z = r cosφ, y = r sinφ, z = ξ. Tada jedomen novih promenljivih r ∈ (0, R), ξ ∈ (−h, h) i φ ∈ (0, 2π). Stoga je
Iz = c
2π∫0
dφ
h∫−h
dξ
R∫0
r3dr = πchR4.
Takode je
Ix = c
2π∫0
dφ
R∫0
r dr
h∫−h
(r2 sin2 φ+ ξ2) dξ
= cπhR2
(2h2
3+R2
2
).
2.10.4 Teziste materijalne ravne figure
Neka je dat konacan sistem tacaka Pi(xi, yi), cije su mase jednake mi, i =1, . . . , n. Tada teziste T (xt, yt) ovog sistema tacaka ima sledece koordinate:
xt =
n∑i=1
ximi
n∑i=1
mi
, yt =
n∑i=1
yimi
n∑i=1
mi
.
Neka je G ravna figura, odnosno merljiva oblast u R2, i neka je datagustina raspodele mase tela G funkcijom f(x, y), koja je nenegativna ineprekidna na G. Neka je T = G1, . . . , Gn razbijanje skupa G i neka

68 GLAVA 2. INTEGRACIJA
su Mi(xi, yi) ∈ Gi proizvoljne tacke. Tada su priblizne koordinate tezistaT (xt, yt) tela G date na sledeci nacin:
xt ∼
n∑i=1
xif(xi, yi) ·m(Gi)
n∑i=1
f(xi, yi) ·m(Gi)
, yt ∼
n∑i=1
yif(xi, yi) ·m(Gi)
n∑i=1
f(xi, yi) ·m(Gi)
.
Prelaskom na granicnu vrednost kada dijametar podele tezi nuli, sledi da sukoordinate tezista precizno:
xt =
∫∫G
xf(x, y) dx dy∫∫G
f(x, y) dx dy, yt =
∫∫G
yf(x, y) dx dy∫∫G
f(x, y) dx dy.
Izrazi
My =
∫∫G
xf(x, y) dx dy, Mx =
∫∫G
yf(x, y) dx dy
nazivaju se staticki momenti ravne figure G u odnosu na ose Oy i Ox redom.Velicina ∫∫
G
f(x, y) dx dy
je, naravno, masa ravnog tela G.
Primer 2.10.3. Izracunati koordinate tezista tela oblika cetvrtine elipsex2
a2+ y2
b2= 1, x ≥ 0, y ≥ 0, ako je gustina raspodele mase data sa f(x, y) = 1.
Resenje. Prema ranije datim formulama, vazi
xt =
a∫0
dx
ba
√a2−x2∫0
x dy
a∫0
dx
ba
√a2−x2∫0
dy
=4a
3πi yt =
4b
3π.
2.10.5 Teziste materijalne figure u prostoru
Neka je telo u prostoru predstavljeno kao oblast G u R3. Gustina raspodelemase tela G data je nenegativnom i neprekidnom funkcijom f(x, y, z) na

2.10. POJMOVI U MEHANICI 69
skupu G. Tada su koordinate tezista tela T (xt, yt, zt) date formulama
xt =
∫∫∫G
xf(x, y, z) dx dy dz∫∫∫G
f(x, y, z) dx dy dz, yt =
∫∫∫G
yf(x, y, z) dx dy dz∫∫∫G
f(x, y, z) dx dy dz
zt =
∫∫∫G
zf(x, y, z) dx dy dz∫∫∫G
f(x, y, z) dx dy dz.
Izrazi
Myz =
∫∫∫G
xf(x, y, z) dx dy dz, Mxz =
∫∫∫G
yf(x, y, z) dx dy dz,
Mxy =
∫∫∫G
zf(x, y, z) dx dy dz
nazivaju se staticki momenti ravne figure G u odnosu na ravni Oyz, Oxz iOxy redom.
Primer 2.10.4. Dato je telo oblika polulopteG poluprecnika R i konstantnegustine c. Odrediti teziste tela G.
Resenje. Bez gubljenja opstosti, pretpostavimo da je telo G ogranicenopolusferom z =
√R2 − x2 − y2 i Oxy ravni. Ocigledno su poznate koordi-
nate xt = 0 i yt = 0. Prelaskom na sferne koordinate: x = r cosφ sinψ,y = R sinφ sinψ, z = r cosψ, uz uslove r ∈ (0, R), φ ∈ (0, 2π), ψ ∈ (0, π/2),sledi da vazi
zt =
2π∫0
dφR∫0
r3drπ/2∫0
sinψ cosψ dψ
23R
3π=
3
8R.

70 GLAVA 2. INTEGRACIJA
Glava 3
Krivolinijski integrali
3.1 Krive u Rn
Kriva u prostoru Rn je neprekidno preslikavanje γ : [a, b] → Rn, pri cemu jea, b ∈ R i a < b.
Skup γ∗ = γ(t) : t ∈ [a, b] je grafik krive γ.
Imamo u vidu da je neprekidna slika kompaktnog skupa uvek kompaktanskup, [a, b] je kompakt u R i γ je neprekidno preslikavanje na [a, b]. Stogaproizilazi da je γ∗ kompaktan skup u Rn.
Ako je γ : [a, b] → Rn kriva, tada postoje koordinatne funkcije x1, . . . , xn :[a, b] → Rn, tako da za svako t ∈ [a, b] vazi γ(t) = (x1(t), . . . , xn(t)). Ko-risti se i oznaka γ = (x1, . . . , xn). Podsecamo da je neprekidnost funkcije γna [a, b] ekvivalentna neprekidnosti svih koordinatnih funkcija x1, . . . , xn na[a, b].
Kriva γ je uvek orijentisama u smislu rasta parametra. Dakle, za svakot1, t2 ∈ [a, b] i t1 < t2, vazi da je kriva γ orijentisana od tacke γ(t1) ka tackiγ(t2). Specijalno, γ(a) je pocetak krive γ, dok je γ(b) kraj krive γ, i kriva γje orijentisana od tacke γ(a) ka tacki γ(b).
Ako postoje tacke t1, t2 ∈ [a, b], tako da je t1 = t2 i γ(t1) = γ(t2) = T ,onda je T tacka samopreseka krive γ. Izuzetno, ako je γ(a) = γ(b) = T ,onda je T istovremeno pocetak i kraj krive γ, ali nije tacka samopreseka.
Ako je γ(a) = γ(b), onda je γ zatvorena kriva.
Kriva γ je prosta, ako ova kriva nema tacaka samopreseka.
Neka je P : a = t1 < t1 < · · · < tk = b proizvoljna podela segmenta[a, b]. Tada je
ℓ(γP) =k∑j=1
∥γ(tj)− γ(tj−1)∥
71

72 GLAVA 3. KRIVOLINIJSKI INTEGRALI
duzina poligonalne linije γP cija su temena γ(t0), γ(t1), . . . , γ(tk) u skupu γ∗,i ova temena su odredena podelom P. U upotrebi je termin: poligonalnalinija γP je upisana u krivu γ. Neka je d(P) = max
j|tj − tj−1| dijametar
podele P.Ako podeli P pridruzimo nekoliko podeonih tacaka, dobijamo finiju podelu
P ′, u oznaci P ′ ≻ P. Ocidgledno je d(P) ≥ d(P ′). Finijoj podeli odgovaranova poligonalna linija γP ′ , cija je duzina ℓ(γP ′). Na osnovu ocigledne ge-ometrijske nejednakosti trougla, sledi da je ℓ(γP) ≤ ℓ(γP ′) (videti Sliku 17).
Slika 17.
Dakle, finije podele segmenta [a, b] proizvode poligonalne linije vece duzine,koje su upisane u krivu γ.
Kriva γ je rektificijabilna (odnosno, kriva γ ima duzinu), ako postojipozitivan broj M tako da je
k∑j=1
∥γ(tj)− γ(tj−1)∥ ≤M
za sve podele P : a = t0 < t1 < · · · < tk = b segmenta [a, b]. Ako je γrektificijabilna kriva, onda je
ℓ(γ) = supP
k∑j=1
∥γ(tj)− γ(tj−1)∥
duzina krive γ, pri cemu je supremum uzet po svim podelama P segmenta[a, b].
Rektificijabilne krive se nazivaju jos i krive ogranicene varijacije, pricemu je totalna varijacija krive (na segmentu [a, b]) upravo jednaka duzinite krive.
Ako je γ rektificijabilna kriva, imajuci u vidu da su duzine poligonalnihlinija nenegeativne, dolazimo do jednakosti:
limd(P)→0
k∑j=1
∥γ(tj)− γ(tj−1)∥ = supP
k∑j=1
∥γ(tj)− γ(tj−1)∥.

3.1. KRIVE U RN 73
Pri tome,
limd(P)→0
k∑j=1
∥γ(tj)− γ(tj−1)∥ = A ∈ R,
ako i samo ako za svako ϵ > 0 postoji δ > 0, tako da za svaku podelu Psegmenta [a, b] vazi implikacija
d(P) < δ =⇒
∣∣∣∣∣∣k∑j=1
∥γ(tj)− γ(tj−1)∥ −A
∣∣∣∣∣∣ < ϵ.
Kriva (funkcija) γ = (x1, . . . , xn) je diferencijabilna, ako i samo akosu sve koordinatne funkcije x1, . . . , xn diferencijabilne. U tom slucaju jeγ′ = (x′1, . . . , x
′n). Ako je γ′(t) = 0 za neko t ∈ [a, b], onda je γ′(t) je
tangenta krive γ u tacki γ(t).
Kriva (funkcija) γ je neprekidno diferencijabilna, ako i samo ako γ′ pos-toji i γ′ je neprekidna funkcija. Ekvivalentno, γ je neprekdino diferencija-bilna ako i samo ako su sve funkcije x1, . . . , xn neprekidno diferencijabilne.
Kriva γ je glatka, ako je γ′ neprekidna funkcija na [a, b] i γ′(t) = 0 zasvako t ∈ [a, b]. Imajuci u vidu da je γ′(t) = 0 vektor tangente krive γ utacki γ(t), proizilazi da je kriva γ je glatka, ako i samo ako je vektor tangentekrive γ razlicit od nula-vektra u svakoj tacki, i osim toga ”kretanje vektoratangente“ je neprekidno.
Ekvivalentno, γ = (x1, . . . , xn) je glatka kriva, ako i samo ako su svefunkcije x1, . . . , xn neprekidno diferencijabilne na [a, b], i pri tome je
∥γ′(t)∥ =√(x′1(t))
1 + · · ·+ (x′n(t))2 = 0, za svako t ∈ [a, b].
Ako je γ = (x1, . . . , xn) kriva, tada je po definicijib∫aγ(t)dt =
(b∫ax1(t)dt, · · · ,
b∫axn(tdt
).
Svi integrali postoje, jer su po pretpostavci funkcije x1, . . . , xn neprekidnena [a, b].
Teorema 3.1.1. Neka je γ : [a, b] → Rn neprekidno diferencijabilna funkcija.Tada vazi formula Njutn-Lajbnica:
b∫a
γ′(t)dt = γ(b)− γ(a).

74 GLAVA 3. KRIVOLINIJSKI INTEGRALI
Dokaz. Neka je γ = (x1, . . . , xn). Primenimo odgovarajucu teoremu zaskalarne funkcija x1, . . . , xn, koje su neprekidno diferencijabilne na [a, b]:
b∫a
γ′(t)dt =
b∫a
x′1(t)td, . . . ,
b∫a
x′n(t)dt
=
(x1(b)− x1(a), . . . , xn(b)− xn(a)
)= γ(b)− γ(a).
Dokazujemo sledecu teoremu o integralima krivih (vektorskih funkcijaskalarnog argumenta).
Teorema 3.1.2. Neka je γ : [a, b] → Rn neprekidno preslikavaje. Tada jet 7→ ∥γ(t)∥ realna integrabilna funkcija na [a, b] i pri time je∥∥∥∥∥∥
b∫a
γ(t)dt
∥∥∥∥∥∥ ≤b∫a
∥γ(t)∥dt.
Dokaz. Neka je γ = (x1, . . . , xn). Sve funkcije γ, x1, . . . , xn su neprekidnena [a, b]. Funkcija x 7→ ∥x∥ je neprekidna na Rn. Stoga je i funkcija t 7→∥γ(t)∥ =
√(x1(t))2 + · · ·+ (xn(t))2 neprekidna na [a, b]. Dakle, postoji
b∫a∥γ(t)∥dt. Neka je y =
b∫aγ(t)dt ∈ Rn i yi =
b∫axi(t)dt, j = 1, . . . , n. Tada je
y = (y1, . . . , yn). Vazi
∥y∥2 =n∑i=1
y2i =n∑i=1
yi
b∫a
xi(t)dt =
b∫a
(n∑i=1
yi xi(t)
)dt.
Na osnovu nejednakosti Kosi-Svarca-Bunjakovskog, sledi da je za svako t ∈[a, b] ispunjeno:
n∑i=1
yi xi(t) ≤
(n∑i=1
y2i
)1/2( n∑i=1
(xi(t))2
)1/2
= ∥y∥∥γ(t)∥.
Integralimo poslednju nejednakost po t na segmentu [a, b]:
∥y∥2 =b∫a
(n∑i=1
yi xi(t)
)dt ≤ ∥y∥
b∫a
∥γ(t)∥dt.

3.1. KRIVE U RN 75
Ako je y = 0, trazena nejednakost sledi trivijalno, Ako je y = 0, onda je∥∥∥∥∥∥b∫a
γ(t)dt
∥∥∥∥∥∥ = ∥y∥ ≤b∫a
∥γ(t)∥dt.
Rezultat ove teoreme trivijalno vazi i pod opstijom pretpostavkom, dasu sve funkcije x1, . . . , xn Riman integrabilne na segmentu [a, b].
Koristeci prethodno dokazanu nejednakost dokazujemo teoremu o rekti-ficijabilnosti glatke krive.
Teorema 3.1.3. Neka je γ : [a, b] → Rn glatka kriva. Tada je γ rektificija-bilna kriva i njena duzina je
ℓ(γ) =
b∫a
∥γ′(t)∥dt =b∫a
√(x′1(t))
2 + · · ·+ (x′n(t))2dt.
Dokaz. Neka je P : a = t0 < t1 · · · < tk = b proizvoljna podela segmenta[a, b]. Na osnovu neprekidnosti funkcija x′1, . . . , x
′n sledi da vazi:
∥γ(tj)− γ(tj−1)∥ = ∥tj∫
tj−1
γ′(t)dt∥ ≤tj∫
tj−1
∥γ′(t)∥dt.
Sumiranjem svih nejednakosti za j = 1, . . . , k, sledi da je
k∑j=1
∥γ(tj)− γ(tj−1)∥ ≤∫ b
a∥γ′(t)∥dt.
Na kraju, posmatramo supremum leve strane nejednakosti po svim pode-lama P segmenta [a, b]:
ℓ(γ) ≤b∫a
∥γ′(t)∥dt.
Potrebno je dokazati suprotnu nejednakost. Funkcija γ′ je neprekidnana [a, b], te je ova funkcija ravnomerno neprekidna na [a, b]. Neka je ϵ > 0.Postoji δ > 0, tako da za svako s, t ∈ [a, b], ako je |s − t| < δ, onda je∥γ′(s)− γ′(t)∥ < ϵ. Neka je P : a = t1 < t1 < · · · < tk = b podela segmenta[a, b], tako da je ti−tj−1 < δ za svako j = 1, . . . , k. Stoga, ako je t ∈ [tj−1, tj ],onda je i ∥γ′(t)− γ′(tj∥ < ϵ, odnosno
∥γ′(t)∥ ≤ ∥γ′(tj)∥+ ϵ.

76 GLAVA 3. KRIVOLINIJSKI INTEGRALI
Sada je
tj∫tj−1
∥γ′(t)∥dt ≤tj∫
tj−1
(∥γ′(tj)∥+ ϵ)dt = (∥γ′(tj)∥+ ϵ)(tj − tj−1)
=
∥∥∥∥∥∥∥tj∫
tj−1
(γ′(t) + γ′(tj)− γ′(t))dt
∥∥∥∥∥∥∥+ ϵ(tj − tj−1)
≤
∥∥∥∥∥∥∥tj∫
tj−1
γ′(t)dt
∥∥∥∥∥∥∥+∥∥∥∥∥∥∥
tj∫tj−1
(γ′(tj)− γ′(t))dt
∥∥∥∥∥∥∥+ ϵ(tj − tj−1)
≤ ∥γ(tj−1)− γ(tj)∥+tj∫
tj−1
∥γ′(tj)− γ′(t)∥dt+ ϵ(tj − tj−1)
≤ ∥γ(tj−1)− γ(tj)∥+ 2ϵ(tj − tj−1).
Saberemo sve prethodne nejednakosti za j = 1, . . . , k:
b∫a
∥γ′(t)∥dt ≤k∑j=1
∥γ(tj)− γ(tj−1)∥+ 2ϵ(b− a).
Leva strana nejednakosti je konstantan broj, dok desna strana zavisi odpodele P i broja ϵ > 0. Dakle, posmatramo prvo infimum desne strane posvim ϵ > 0, a zatim posmatramo supremum po svim podelama P segmenta[a, b]. Sledi trazena nejednakost
b∫a
∥γ′(t)∥dt ≤ ℓ(γ).
Uzimajuci u obzir da smo pokazali i obrnutu nejednakost, teorema je dokazana.
Kriva γ je deo po deo glatka, ako postoji podela P : a = s1 < s1 < · · · <sm = b segmenta [a, b], tako da je kriva γ glatka na svakom od segmenata[sj−1, sj ], j = 1, . . . ,m. U ovom slucaju leva tangenta krive γ u tacki sj nasegmentu [sj−1, sj ] ne mora biti jednaka desnoj tangenti krive γ u tacki sj nasegmentu [sj , sj+1]. Dakle, jedine tacke koje remete neprekidnost kretanjatangente γ′ jesu s1, . . . , sm−1.
Deo po deo glatka kriva naziva se putanja.Ako je γ prosta zatvorena putanja u ravni, tada je γ kontura u ravni.
3.1. KRIVE U RN 77
Teorema 3.1.4. Ako je γ deo po deo glatka kriva u Rn, tada je γ rektifici-jabilna. Takode
ℓ(γ) =
b∫a
∥γ′(t)∥dt =b∫a
√(x′1(t))
2 + · · ·+ (x′n(t))2dt,
pri cemu zanemarujemo konacno mnogo tacaka sj u kojima ne postoji γ′(sj).
Dokaz. Neka je a = s0 < s1 < · · · < sm = b, tako da je γ glatka na svakomsegmentu [sj−1, sj ]. Tada je γ rektificijabilna na [sj−1, sj ]. Jednostavnosledi da je duzina krive γ (na segmentu [a, b]) jednaka zbiru duzina krive γna svakom od segmenata [sj−1, sj ]. Formula za izracunavanje duzine krive
sledi na osnovub∫a∥γ′(t)∥dt =
m∑j=1
sj∫sj−1
∥γ′(t)∥dt.
Definicija 3.1.1. Neka je a, b, c, d ∈ R tako da je a < b i c < d. Preslikavanjeµ : [a, b] → [c, d] je difeomorfizam, ako je µ strogo monotona bijekcija, i pritome su µ i µ−1 neprekidno diferencijabilne funkcije.
Definicija 3.1.2. Neka su γ1 : [a, b] → Rn i γ2 : [c, d] → Rn dve putanje.Putanje γ1 i γ2 su medjusobno ekvivalentne i iste orijentacije, ako postojistrogo rastuci difeomorfizam µ : [a, b] → [c, d], tako da je γ1 = γ2 µ. U tomslucaju koristimo oznaku γ1 ≡ γ2.
Sledece tvrdenje je ocigledno.
Teorema 3.1.5. Ako je γ1 ≡ γ2, onda je γ∗1 = γ∗2 .
Teorema 3.1.6. Relacija ≡ je relacija ekvivalencije na skupu svih putanjau Rn.
Dokaz. Neka su γ1 : [a, b] → Rn, γ2 : [c, d) → Rn i γ3 : [e, f ] → Rn putanje.Identicko preslikavanje id : [a, b] → [a, b] je strogo rastuci difeomorfizam,
te na osnovu γ1 = γ1 id sledi γ1 ≡ γ1, odnosno ≃ je refleksivna relacija.Neka je γ1 ≡ γ2 i neka je µ : [a, b] → [c, d] strogo rastuci difeomorfizam
tako da vazi γ1 = γ2 µ. Tada je µ−1 : [c, d] → [a, b] takode strogo rastucidifeomorfizam i γ2 = γ1 µ−1. Sledi da je γ2 ≡ γ1. Time dokazujemosimetricnost relacije ≡.
Neka je γ1 ≡ γ2, γ2 ≡ γ3, i neka su µ : [a, b] → [c, d], ν : [c, d] → [e, f ]strogo rastuci difeomorfizmi, tako da je γ1 = γ2 µ i γ2 = γ3 ν. Tada jeν µ : [a, b] → [e, f ] strogo rastuci difeomorfizam i γ1 = γ3 (ν µ). Slediγ1 ≡ γ3. Time je dokazana tranzitivnost relacije ≡.
78 GLAVA 3. KRIVOLINIJSKI INTEGRALI
Ako su [a, b] i [c, d] dva netrivijalna segmenta realne prave (a < b i c < d),tada postoji strogo rastuci difeomorfizam µ : [a, b] → [c, d]. Jednostavno jeproveriti da linearni preslikavanje µ(t) = d−c
b−a t+ c− ad−cb−a ispunjava trazeneuslove.
Definicija 3.1.3. Neka su γ1[a, b] → Rn i γ2 : [c, d] → Rn dve putanje, ineka je µ : [a, b] → [c, d] strogo opadajuci difeomorfizam. Ako je γ1 = γ2 µ,tada su γ1 i γ2 ekvivalentne i suprotnih orijentacija. Oznaka je γ1 ≡ −γ2.
Teorema 3.1.7. Neka su γ1 : [a, b] → Rn, γ2 : [c, d] → Rn i γ3 : [e, f ] → Rnputanje.
(1) Ako je γ1 ≡ −γ2, tada je γ2 ≡ −γ1;(2) Ako je γ1 ≡ −γ2 i γ2 ≡ −γ3, tada je γ1 ≡ γ3.
Dokaz. (1) Neka je γ1 ≡ −γ2 i neka je µ : [a, b] → [c, d] strogo opadajucidifeomorfizam tako da vazi γ1 = γ2 µ. Tada je µ−1 : [c, d] → [a, b] strogoopadajuci difeomorfizam i vazi γ2 = γ1 µ−1. Stoga je γ2 ≡ −γ1.
(2) Neka je, uz uslove (1), ν : [c, d] → [e, f ] strogo opadajuci difeomor-fizam tako da je γ2 = γ3 ν. Tada je ν µ : [a, b] → [e, f ] strogo rastucidifeomorfizam i vazi γ1 = γ3 (ν µ). Stoga je γ1 ≡ γ3.
Neka je γ1 : [a, b] → Rn putanja. Posmatramo preslikavanje µ : [a, b] →[a, b] definisano sa µ(t) = a+b−t. Tada je µ strogo opadajuci difeomorfizam.Ako je γ2 : [a, b] → Rn putanja definisana kao γ2(t) = γ1(s+ b− t) = γ1 µ,tada je γ2 ≡ −γ1.
Na kraju, cesto se koristi ”sabiranje“ putanja koje se ”nastavljaju“. Nekasu γ1 : [a, b] → Rn i γ2 : [c, d] → Rn dve putanje, tako da je γ1(b) = γ2(c).Neka je e > b. Postoji strogo rastuci difeomorfizam µ : [b, e] → [c, d]. Nekaje γ3 : [b, e] → Rn putanja odredena kao γ3(t) = γ2(µ(t). Tada je γ3 ≡ γ2.Definisemo putanju γ : [a, e] → Rn na sledeci nacin:
γ(t) =
γ1(t), t ∈ [a, b],
γ3(t) = γ2(µ(t)), t ∈ [b, e].
Tada je putanja γ jednaka zbiru putanja γ1 i γ2, u oznaci γ = γ1 + γ2 (vidiSliku 18).
Slika 18.

3.2. KRIVOLINIJSKI INTEGRAL PRVOG REDA 79
Na kraju formulisemo Zordanovu teoremu o prostim zatvorenim krivamau ravni.
Teorema 3.1.8. (Zordan) Neka je γ prosta zatvorena kriva u ravni R2.Tada postoje uzajamno disjunktne oblasti G0
γ i G∞γ , tako da vazi:
(1) G0γ ∩G∞
γ = ∅;(2) G0
γ je ogranicena oblast, G∞γ je neogranicena oblast u R2;
(3) ∂G0γ = ∂G∞
γ = γ∗;
(4) R2 = G0γ ∪G∞
γ ∪ γ∗.
Dokaz ove teoreme prevazilazi okvire rukopisa iz matematicke analize nauobicajenom nivou. Zordanova teorema moze biti dokazana, izmedu osta-log, koriscenjem Brauerove teoreme o fiksnoj tacki, ili metodama algebarsketopologije.
SkupG0γ je ogranicena oblast odredena konturom γ, ili kontura γ ogranicava
oblast G0γ . Sa druge strane, G∞
γ je neogranicena oblast odredena konturomγ.
Intuitivno, kontura γ je orijentisana pozitivno, ako pri obilastku kontureγ u smeru orijentacije, oblast G0
γ ostaje sa leve strane konture.
Precizna definicija pozitivne orijentacije konture uvodi se primenom ho-motopije: kruznica γ1(t) = (cos t, sin t), t ∈ [0, 2π] neprekidnom transforma-cijom u ravni R2 moze biti prevedena u krivu γ. Pri tome, pozitivna ori-jentacija kruznice (u smeru rasta parametra t) postaje pozitivna orijentacijakonture γ. Ovakva nepekidna transformacija je homotopna ekvivalencija, iizucava se detaljno u okviru topologije.
Ako je γ kontura u ravni, onda je njena pozitivna orijenacija oznacenasa γ+, dok je negativna orijentacija oznacena sa γ−.
3.2 Krivolinijski integral prvog reda
Definicija 3.2.1. Neka je γ = (x1, . . . , xn) : [a, b] → Rn putanja, i neka jef : γ∗ → R funkcija. Ako je funkcija (f γ) · ∥γ′∥ integrabilna u Rimanovomsmislu na [a, b], tada je funkcija f integrabilna na γ, i krivolinijski integralprvog reda funkcije f po putanji γ definisan je kao

80 GLAVA 3. KRIVOLINIJSKI INTEGRALI
∫γ
f =
∫γ
fds =
b∫a
(f γ)(t) ∥γ′(t)∥ dt
=
b∫a
f(x1(t), . . . , xn(t))√
(x′1(t))2 + · · · (x′n(t))2 dt.
U prethodnoj formuli javalju se izvodi x′j , koji su neprekidne funkcijesvuda na [a, b], osim evenutalno u konacno mnogo tacaka. Tacke u ko-jima izvodi x′j ne postoje, jednostavno zanemarimo u prethodnoj defini-ciji krivolinijskog integrala prvog reda. Jasno je da zanemarivanje konacnomnogo tacaka ne utice na vrednost integrala.
Na primer, ako je funkcija f neprekidna na γ∗ osim eventualno u konacnomnogo tacaka, onda postoji
∫γf .
Teorema 3.2.1. Neka su γ1 : [a, b] → Rn i γ2 : [c, d] → Rn dve putanje,tako da je γ1 ≡ γ2, ili γ1 ≡ −γ2. Ako je f : γ∗1 → R funkcija koja jeintegrabilna na γ1, tada je f integrabilna i na γ2 i∫
γ1
f =
∫γ2
f.
Dokaz. Neka je γ1 = γ2 µ, pri cemu je µ : [a, b] → [c, d] strogo rastucidifeomorfizam. Tada je µ′ ≥ 0 na [a, b]. Vazi:
∫γ1
f =
b∫a
f(γ1(t))∥γ′1(t)∥dt =b∫a
f(γ2(µ(t)))∥γ′2(µ(t))µ′(t)∥dt
=
b∫a
f(γ2(µ(t)))∥γ′2(µ(t))∥µ′(t)dt
=
d∫c
f(γ2(s))∥γ′2(s)∥ds =∫γ2
f.
Pretpostavimo sada da je µ strogo opadajuci difeomorfizam. Tada jeµ′ ≤ 0 na [a, b], i stoga je
3.2. KRIVOLINIJSKI INTEGRAL PRVOG REDA 81
∫γ1
f =
b∫a
f(γ1(t))∥γ′1(t)∥dt =b∫a
f(γ2(µ(t)))∥γ′2(µ(t))µ′(t)∥dt
=
b∫a
f(γ2(µ(t)))∥γ′2(µ(t))∥(−µ′(t))dt
= −c∫d
f(γ2(s))∥γ′2(s)∥ds =∫γ2
f.
Time je teorema dokazana.
Formulisemo sledece ocigledno svojstvo krivolinijskih integrala.
Teorema 3.2.2. Krivolinijski integral prvog reda je linearan u odnosu nafunkciju. Drugim recima, ako su f i g integrabilne funkcije na putanji γu Rn, i ako je α, β ∈ R, tada je αf + βg takode integrabilna na γ, i vaziformula ∫
γ
(αf + βg)ds = α
∫γ
fds+ β
∫γ
gds.
Dokaz. Sledi na osnovu
α
∫γ
f + β
∫γ
g = α
b∫a
f(γ(t)∥γ′(t)∥dt+ β
b∫a
g(γ(t)∥γ′(t)∥dt
=
b∫a
(αf(γ(t)) + βg(γ(t))∥γ′(t)∥dt =∫γ
(αf + βg).
Na kraju, formulisemo tvrdenje o aditivnosti integrala u odnosu naputanju integracije.
Teorema 3.2.3. Neka je funkcija f integrabilna na putanjama γ1 i γ2 uRn. Tada je f integrabilna i na putanji γ1 + γ2, pri cemu vazi formula∫
γ1+γ2
f =
∫γ1
f +
∫γ2
f.

82 GLAVA 3. KRIVOLINIJSKI INTEGRALI
Dokaz. Neka su γ1 : [a, b] → Rn i γ2 : [c, d] → Rn putanje. Neka je e > b.Postoji rastuci difeomorfizam µ : [b, e] → [c, d] tako da je γ′2 : [b, e] → Rnodredena sa γ3 = γ2 µ. Tada je γ3 ≡ γ2. Neka je f integrabilna na γ1 ina γ2. Tada je f integrabilna na γ3. Neka je γ = γ1 + γ2 (videti odeljak ozbiru putanja). Tada je γ|[a,b] = γ1 i γ|[b,e] = γ3. Vazi:
∫γ1
f +
∫γ2
f =
∫γ1
f +
∫γ3
f =
b∫a
(f(γ1(t))∥γ′1(t)∥dt+e∫b
(f(γ3(t))∥γ′3(t)∥dt
=
b∫a
(f(γ(t))∥γ′(t)∥dt+e∫b
(f(γ(t))∥γ′(t)∥dt
=
e∫a
(f(γ(t))∥γ′(t)∥dt =∫
γ1+γ2
f.
Time je tvrdenje dokazano.
Teorema 3.2.4. Neka je γ putanja u Rn. Tada je∫γ1 =
∫γds = ℓ(γ).
Dokaz. Sledi na osnovu definicije krivolinijskog interala prvog reda, kao idokazane formule za izracunavanje duzine putanje:
∫γ
1 =
b∫a
∥γ′(t)∥dt = ℓ(γ).
Primer 3.2.1. Izracunati duzinu kruznice poluprecnika r > 0.
Dokaz. Dovoljno je posmatrati kruznicu u ravni poluprecnika r sa centrom ukooridnatnom pocetku. Parametarske jednacine ove krucnice su x = r cos t,y = r sin t, t ∈ [0, 2π]. Prema dokazanoj formuli, duzina kruznice je
ℓ =
2π∫0
√r2 sin2 t+ r2 cos2 tdt = 2rπ.

3.2. KRIVOLINIJSKI INTEGRAL PRVOG REDA 83
3.2.1 Rimanova suma i geometrijska interpretacijakrivolinijskog integrala prvog reda
Razmatramo krivolinijski integral prvog reda kao granicnu vrednost odgo-varajucih Rimanovih suma.
Pretpostavimo da je γ = (x1, . . . , xn) : [a, b] → Rn putanja, i neka jef : γ∗ → R funkcija integrabilna na γ. Neka je a = t0 < t1 < · · · <tk = b proizvoljno razbijanje segmenta [a, b], i neka su ηj ∈ [tj−1, tj ] (j =1, . . . , k) proizvoljne tacke u tim segmentima. Oznacimo sa ℓj duzina putanjeγ izmedu tacaka γ(tj−1) i γ(tj). Ova duzina postoji, jer je po pretpostavciγ putanja u Rn, a samim tim postoji ℓ(γ). Primetimo da je ξj = γ(ηj) napomenutom delu putanje γ izmedu γ(tj−1) i γ(tj). Neka je ξ = (ξ1, . . . , ξk).Posmatrajmo integralnu sumu
S(f, γ,P, ξ) =k∑j=1
f(ξj)ℓj . (3.1)
Imajuci u vidu da je duzina ℓk priblizno jednaka
∥γ(tj)− γ(tj−1)∥ =√
(x1(tj)− x1(tj−1))2 + · · ·+ (xn(tj)− xn(tj−1))2,
sledi da je
S(f, γ,P, ξ)≈k∑j=1
f(γ(ηj))√
(x1(tj)− x1(tj−1))2 + · · ·+ (xn(tj)− xn(tj−1))2
=
k∑j=1
f(γ(ηj))
√(∆x1
tj − tj−1
)2
+ · · ·+(
∆xntj − tj−1
)2
·(tj − tj−1),
pri cemu je ∆xi = xi(tj)− xi(tj−1) za i = 1, . . . , n. Greska u aproksimacijise smanjuje ukoliko je d(P) → 0.
Sledi da je
limd(P)→0
S(f, γ,P, ξ) =∫γ
f,
pri cemu ova granicna vrednost postoji nezavisno od podele P i nezavisnood izbora tacaka ξ.
Na osnovu svega izlozenog, do krivolinijskog integrala prvog reda funkcijef po putanji γ, moze se doci razmatranjem granicnih vrednosti odgovarajucihRimanovih suma (3.1).
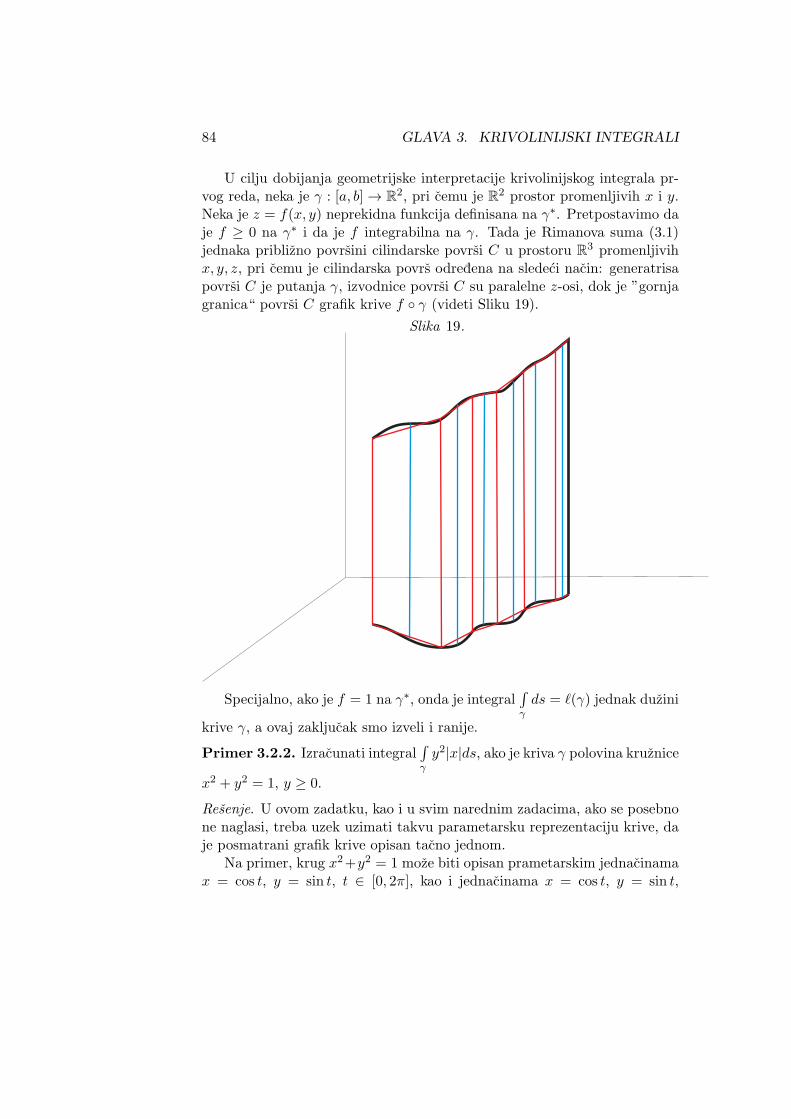
84 GLAVA 3. KRIVOLINIJSKI INTEGRALI
U cilju dobijanja geometrijske interpretacije krivolinijskog integrala pr-vog reda, neka je γ : [a, b] → R2, pri cemu je R2 prostor promenljivih x i y.Neka je z = f(x, y) neprekidna funkcija definisana na γ∗. Pretpostavimo daje f ≥ 0 na γ∗ i da je f integrabilna na γ. Tada je Rimanova suma (3.1)jednaka priblizno povrsini cilindarske povrsi C u prostoru R3 promenljivihx, y, z, pri cemu je cilindarska povrs odredena na sledeci nacin: generatrisapovrsi C je putanja γ, izvodnice povrsi C su paralelne z-osi, dok je ”gornjagranica“ povrsi C grafik krive f γ (videti Sliku 19).
Slika 19.
Specijalno, ako je f = 1 na γ∗, onda je integral∫γds = ℓ(γ) jednak duzini
krive γ, a ovaj zakljucak smo izveli i ranije.
Primer 3.2.2. Izracunati integral∫γy2|x|ds, ako je kriva γ polovina kruznice
x2 + y2 = 1, y ≥ 0.
Resenje. U ovom zadatku, kao i u svim narednim zadacima, ako se posebnone naglasi, treba uzek uzimati takvu parametarsku reprezentaciju krive, daje posmatrani grafik krive opisan tacno jednom.
Na primer, krug x2+y2 = 1 moze biti opisan prametarskim jednacinamax = cos t, y = sin t, t ∈ [0, 2π], kao i jednacinama x = cos t, y = sin t,

3.2. KRIVOLINIJSKI INTEGRAL PRVOG REDA 85
t ∈ [0, 4π]. Prvom reprezentacijom svaka tacka grafika opisana je tacnojednom, osim tacke (1, 0) koja je i pocetak i kraj krive, te je stoga opisanadva puta. U drugom slucaju je svaka tacka grafika krive opisana po dva puta,a pocetna odnosno krajnja tacka je opisana tri puta. Prva reperezentacijadaje prostu krivu γ, a druga daje krivu γ1, koja ima tacke samopreseka.Ako se drugacije ne zahteva, pod kruznicom se podrazumeva prosta kriva,data prvom reprezentacijom.
Vratimo se sada konkretnom problemu. Polukruznica u ovom zadatkuopisana je parametrskim jednacinama: x = cos t, y = sin t, t ∈ [0, π]. Sadaje trazeni integral
I =
∫γ
y2|x|ds =π∫
0
sin2 t| cos t|dt.
Funkcija cos t menja znak na segmentu [0, π], i stoga se ovaj segment delina dva dela. Prethodni integral postaje:
I =
π/2∫0
sin2 t cos t dt−π∫
π/2
sin2 t cos t dt =2
3.
Primer 3.2.3. Neka je dat deo eliptickog cilindra x2
5 + y2
9 = 1, y ≥ 0, z ≥ 0,i neka je data ravan z = y. Naci povrsinu dela cilindra izmedu ravni Oxy iravni z = y (Slika 20).
Resenje. Neka je γ presek cilindra sa ravni xOy, odnosno deo elipse x2
5 + y2
9 =1, y ≥ 0. Treba izracunati integral
I =
∫γ
yds.
Parametarske jednacine dela elipse jesu x =√5 cos t, y = 3 sin t, t ∈ [0, π].
Povrsina trazenog dela cilindra jeste je
I =
π∫0
3 sin t√
5 sin2 t+ 9 cos2 t dt.

86 GLAVA 3. KRIVOLINIJSKI INTEGRALI
Smenom cos t = u proizilazi da vazi
I = −3
−1∫1
√4u2 + 5 du = 6
1∫0
√4u2 + 5 du = 9 +
15
4ln 5.
Slika 20.
Primer 3.2.4. Izracunati krivolinijski integral prvog reda∫γxy ds, ako je γ
data kao presek sfere x2 + y2 + z2 = 2 i ravni x+ y + z = 0.
Resenje. Iz jednacine ravni neposredno sledi z = −x − y. Zamenom ovogizraza u jednacinu sfere, dolazimo do jednacine
x2 + xy + y2 = 1. (3.2)
Dobijena kriva je kruznica u ravni x+ y + z = 0.Dokazacemo da svaka kriva drugog reda oblika
Ax2 + 2Bxy + Cy2 = D (3.3)
gde je B = 0, ima ekvivalentan oblik
λ(y − αx)2 + µ(y − βx)2 = D, (3.4)
pri cemu je αβ = −1. Slucaj B = 0 je samo kada je kriva vec u elementarnomobliku.

3.2. KRIVOLINIJSKI INTEGRAL PRVOG REDA 87
Jednostavnim uporedivanjem koeficijenata dolazi se do sistema jednacina
λα2 + µβ2 − A = 0λα + µβ + B = 0λ + µ − C = 0.
Poslednji sistem jednacina se moze shvatiti kao homogeni sistem jednacina sanetrivijalnim resenjem (λ, µ,−1), odakle sledi da determinanta tog sistemamora biti jednaka nuli, odnosno∣∣∣∣∣∣
α2 β2 Aα β −B1 1 C
∣∣∣∣∣∣ = 0.
Prva kolona se pomnozi sa −1 i doda drugoj koloni, te se dobija∣∣∣∣∣∣α2 β2 − α2 Aα β − α −B1 0 C
∣∣∣∣∣∣ = 0.
Uslov αβ = −1 garantuje α = β, te se druga kolona podeli sa β−α i dobijase ∣∣∣∣∣∣
α2 α+ β Aα 1 −B1 0 C
∣∣∣∣∣∣ = 0.
Druga kolona se pomnozi sa −α i doda prvoj, pri cemu se uzima u obzirαβ = −1. Dobija se jednacina∣∣∣∣∣∣
1 α+ β A0 1 −B1 0 C
∣∣∣∣∣∣ = 0.
Poslednja jednacina daje uslov α + β =C −A
B, uz pretpostavku B = 0.
Zajedno sa pretpostavkom αβ = −1, dolazi se do vrednosti za α i β. Zatimse jednostavno odreduju λ i µ.
U ovom konkretnom slucaju (3.2) je A = C = 1 i B = 12 . Stoga je
α+ β = 0, sto zajedno sa αβ = −1 daje α = 1,β = −1. Zatim sledi λ = 14 i
µ = 34 . Ekvivalentan oblik krive (3.2) je
(y − x
2
)2
+
(√3
2(y + x)
)2
= 1.
88 GLAVA 3. KRIVOLINIJSKI INTEGRALI
Stoga se uvodi smena promenljivih
u =y − x
2, v =
√3
2y + x, w =
√3
2z,
a inverzne transformacije su
x =v −
√3u√
3, y =
√3u+ v√
3, z =
2√3w.
Kruznica u novim koordinatama je data sistemom jednacina:
u2 + v2 = 1, w = −v.
Stoga se uvode cilindricne koordinate, u kojima je jednacina krucnice datasa:
u = cosφ, v = sinφ, w = − sinφ, φ ∈ [0, 2π].
Vracanjem na polazne koordinate x, y i z, sledi da je jednacina kruznice:
x =sinφ−
√3 cosφ√3
, y =
√3 cosφ+ sinφ√
3, z = − 2√
3sinφ,
φ ∈ [0, 2π].
Polazni integral je
I =
∫γ
xy ds =1
3
2π∫0
(sin2 φ− 3 cos2 φ)√
(x′φ)2 + (y′φ)
2 + (z′φ)2 dφ
=
√2
3
2π∫0
(sin2 φ− 3 cos2 φ) dφ = −2π√2
3.
3.3 Krivolinijski integral drugog reda
U ovoj lekciji definisemo krivolinijski integral koji zavisi od orijentacijeputanje. Neka je G oblast u R3. Vektorsko polje je svako preslikavanjeiz G u R3. Ako ovo preslikavanje oznacimo sa F : G → R3, onda postojekoordinatne funkcije P,Q,R : G→ R, tako da vazi F = (P,Q,R).

3.3. KRIVOLINIJSKI INTEGRAL DRUGOG REDA 89
Vektorsko polje F je ravno, ako postoji koordinatni sitetm u R3 u odnosuna koji je R = 0. Specijalno, ako postoji koordinanti sistem u R3 tako da jeQ = 0 i R = 0, onda polje F = (P, 0, 0) jeste skalarno polje.
Podsetimo da je polje F je neprekidno, ako i samo ako je F neprekidnafunkcija, odnosno ako i samo ako su realne funkcije P,Q,R neprekidne. PoljeF je diferencijabilno, ako i samo ako su funkcije P,Q,R diferencijabilne.Polje F je neprekidno diferencijabilno, ako i samo ako su funkcije P,Q,Rneprekidno diferencijabilne.
Neka je γ : [a, b] → R3 putanja u R3, pri cemu je A = γ(a) pocetak, γ,a B = γ(b) kraj putanje γ. Putanja γ orijentisana od tacke A ka tacki B.Ako je γ = (x, y, z), onda je γ′ = (x′, y′, z′) i dγ = γ′(t)dt = ( dx, dy, dz).
Skalarni proizvod vektora F i dγ jeste:
F · dγ = ⟨F, dγ⟩ = P dx+Qdy +Rdz.
Krivolinijski integral drugog reda neprekidnog vektorskog polja F po ori-jentisanoj putanji γ (od tacke A ka tacki B), definisan je kao∫
γ
F ≡∫γ
⟨F, γ⟩ ≡∫γ
P dx+Qdy +Rdz
:=
b∫a
⟨(F γ)(t), dγ(t)⟩ ≡b∫a
⟨(F γ)(t), γ′(t)⟩dt
≡b∫a
[P (x(t), y(t), z(t))x′(t) +Q(x(t), y(t), z(t))y′(t)
+R(x(t), y(t), z(t))z′(t)]dt.
Integral na desnoj strani je odredeni integral neprekidne funkcije jedne realnepromenljive, te stoga krivolinijski integral drugog reda neprekidnog polja Fpo putanji γ uvek postoji. I u ovom slucaju zanemarujemo tacke u kojimaizvodi x′, y′, z′ ne postoje.
Integral moze biti definisan i opstije. Naime, dovoljno je pretpostavitida postoje Rimanovi integrali funkcija P · x′, Q · y′ i R · z′ na [a, b]. U tomslucaju je F integrabilno vektorsko polje po orijentisanoj putanji γ.
Teorema 3.3.1. Ako su γ1 i γ2 ekvivalentne putanje iste orijentacije, odnosnoγ1 ≡ γ2, i ako je F integrabilno polje na γ1, tada je F integrabilno i na γ2,pri cemu vazi ∫
γ1
F =
∫γ2
F.

90 GLAVA 3. KRIVOLINIJSKI INTEGRALI
Dokaz. Neka su γ1 : [a, b] → R3 i γ2 : [c, d] → R3 putanje, i neka je µ :[a, b] → [c, d] strogo rastuci difeomorfizam (tj. µ′ ≥ 0) tako da je γ1 = γ2 µ.Neka je F vektorsko polje integrabilno na γ∗1 . Tada je, koriscenjem smenes = µ(t):
∫γ1
F =
b∫a
⟨(F γ1)(t), γ′1(t)⟩dt =b∫a
⟨(F(γ2(µ(t))), (γ′2(µ(t))µ′(t)⟩dt
=
d∫c
⟨F(γ2(s)), γ′2(s)⟩ds =∫γ2
F.
Teorema 3.3.2. Ako su γ1 i γ2 ekvivalentne putanje suprotnih orijentacija,odnosno ako je γ1 ≡ −γ2, i ako je vektorsko polje F integrabilno na γ1, ondaje F integrabilno na γ2 i vazi ∫
γ1
F = −∫γ2
F.
Dokaz. Neka su date putanje γ1 : [a, b] → R3, γ2 : [c, d] → R3, i neka jeµ : [a, b] → [c, d] opadajuci difeomorfizam (µ′ ≤ 0) tako da je γ1 = γ2 µ.Neka je F vektorsko polje definisano na γ∗1 . Tada je
∫γ1
F =
b∫a
⟨(F(γ1(t)), γ′1(t)⟩dt =b∫a
⟨(F(γ2(µ(t))), (γ′2(µ(t))⟩µ′(t)dt
= −d∫c
⟨F(γ2(s)), γ′2(s))⟩ds = −∫γ2
F.
Posledica 3.3.1. Krivolinijski integral drugog reda menja znak ukoliko sepromeni orijendtacije putanje.
Formulisemo sledeci jednostavan rezultat, koji se moze dokazati analognoodgovarajucem rezultatu za krivolinijske integrale drugog reda.

3.3. KRIVOLINIJSKI INTEGRAL DRUGOG REDA 91
Teorema 3.3.3. Ako su γ1 i γ2 orijentisane putanje koje se mogu nastavitiu smislu orijentacije, i ako je vektorsko polje F integrabilno na γ1 i γ2, tadaje vektorsko polje F integrabilno na γ1 + γ2 i vazi∫
γ1+γ2
F =
∫γ1
F+
∫γ2
F.
Ako su vektorska polja F i G integrabilna na orijenitsanoj putanji γ, iako je α, β ∈ R, tada je αF+ βG polje integrabilno na putanji γ i vazi∫
γ
αF+ βG = α
∫γ
F+ β
∫γ
G.
Drugim recima, krivolinijski integral drugog reda je aditivan u odnosu nakrivu i linearan u odnosu na vektorsko polje.
Na kraju, navodimo primere koji ilustruju prezentovane rezultate.
Primer 3.3.1. Izracunati∫γy dx − x dy, gde je kriva γ suma kruznog luka
x2 + y2 = 1 od tacke A(1, 0) do tacke B(0, 1) i duzi od B do A (Slika 21).
Slika 21.A
B
Resenje. Jednacina orijentisanog luka AB jeste x = cos t, y = sin t, t ∈[0, π/2]. Sada je
I1 =
∫γ1
y dx− x dy =
π/2∫0
[− sin2 t− cos2 t]dt = −π2.
Jednacina orijentisane duzi BA jeste x + y = 1, odnosno x = t, y = 1 − t,t ∈ [0, 1]. Stoga je
I2 =
∫γ2
y dx− x dy =
1∫0
[(1− t)− t(−1)]dt = 1.

92 GLAVA 3. KRIVOLINIJSKI INTEGRALI
Na kraju, trazeni integral je I = I1 + I2 = −π2 + 1.
Primer 3.3.2. Izracunati integral∫γy2 dx+ z2 dy + x2 dz, gde je γ Vivian-
ijeva1 kriva (Slika 22): x2 + y2 + z2 = a2, x2 + y2 = ax, z ≥ 0, pozitivnoorijentisana, posmatrana odozgo.
Resenje. Ekvivalentan oblik jednacina cilindra je(x− a
2
)2+ y2 = a2
4 .Uvodimo cilindricne koordinate x = a
2 + r cosφ, y = r sinφ, z = ξ. Sadajednacina cilindra u novim koordinatama glasi r = a/2. Zamenom ovih
uslova u jednacinu sfrere, dobijamo a2
2 cosφ + ξ2 = a2
2 . Na osnovu uslovaξ ≥ 0, jednacina krive jeste
x =a
2+a
2cosφ, y =
a
2sinφ, z =
a√2
√1− cosφ, φ ∈ [0, 2π].
Iz cinjenice da je z rastuca funkcija po φ ∈ [0, π] i opadajuca funkcija poφ ∈ [π, 2π], sledi da je orijentacija krive upravo ona trazena: pri rastuparametra φ gornji deo sfere ostaje sa leve strane krive. Sada je trazeniintegral jednak:
I = −a3
8
2π∫0
sin3 φdφ+a3
4
2π∫0
(1− cosφ) cosφdφ
+a3
8√2
2π∫0
(1 + cosφ)2sinφ√1− cosφ
dφ.
Jednostavnom smenom φ = ψ + π, uz koriscenje jednakosti sin(ψ + π) =− sinψ i cos(ψ+π) = − cosψ, prvi i treci integral se redom svode na integrale
−π∫
−π
sin3 ψ dψ i
π∫−π
(1− cosψ)2− sinψ√1 + cosψ
dψ.
Oba integrala su jednaka nuli, iz razloga sto je domen integracije simetricanu odnosu na koordinatni pocetak, a funkcije koje se integrale jesu neparne.Stoga je
I =a3
4
2π∫0
(1− cosφ) cosφdφ = −a3π
4.
1Vincenzo Viviani (1622-1703), italijanski matematicar

3.4. GRINOVA FORMULA U RAVNI 93
Slika 22.
3.4 Grinova formula u ravni
Oblast V u ravni R2 je prosto povezana, ako za svaku konturu γ u skupuV vazi G0
γ ⊂ V . Ekvivalentno, V je prosto povezana oblast, ako je svakakontura u V homotopno ekvivalentna tacki u V . Ako oblast V nije prostopovezana, onda je oblast V visestruko povezana.
Neka je γ+ pozitivno orijentisana kontura u ravni R, koja ogranicavaoblast G0
γ . Dokazacemo vezu izmedu krivolinijskih integrala drugog redavektorskog polja F po konturi, i dvostrukog integrala odredene funkcije pooblasti G0
γ .
Oblast V u R2 je elementarna u odnosu na koordinatne ose, ako postojedeo po deo neprekidno diferencijabilne funkcije f, g : [a, b] → R i h, k :[c, d] → R, tako da je f < g na [a, b], kao i h < k na [c, d], i pri tome je (Slika23):
V = (x, y) ∈ R2 : x ∈ [a, b], f(x) < y < g(x)= (x, y) ∈ R2 : y ∈ [c, d], h(y) < x < k(y).
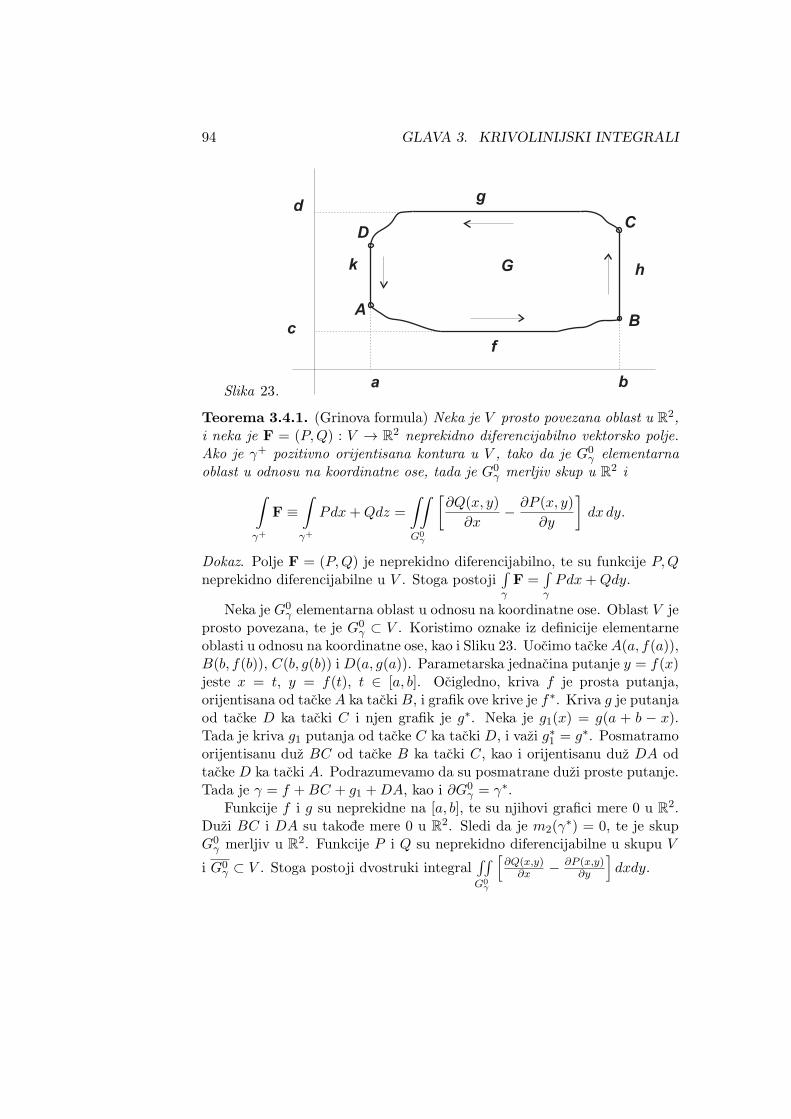
94 GLAVA 3. KRIVOLINIJSKI INTEGRALI
Slika 23.a b
c
d
G
f
g
k h
AB
CD
Teorema 3.4.1. (Grinova formula) Neka je V prosto povezana oblast u R2,i neka je F = (P,Q) : V → R2 neprekidno diferencijabilno vektorsko polje.Ako je γ+ pozitivno orijentisana kontura u V , tako da je G0
γ elementarnaoblast u odnosu na koordinatne ose, tada je G0
γ merljiv skup u R2 i∫γ+
F ≡∫γ+
Pdx+Qdz =
∫∫G0
γ
[∂Q(x, y)
∂x− ∂P (x, y)
∂y
]dx dy.
Dokaz. Polje F = (P,Q) je neprekidno diferencijabilno, te su funkcije P,Qneprekidno diferencijabilne u V . Stoga postoji
∫γF =
∫γPdx+Qdy.
Neka je G0γ elementarna oblast u odnosu na koordinatne ose. Oblast V je
prosto povezana, te je G0γ ⊂ V . Koristimo oznake iz definicije elementarne
oblasti u odnosu na koordinatne ose, kao i Sliku 23. Uocimo tacke A(a, f(a)),B(b, f(b)), C(b, g(b)) i D(a, g(a)). Parametarska jednacina putanje y = f(x)jeste x = t, y = f(t), t ∈ [a, b]. Ocigledno, kriva f je prosta putanja,orijentisana od tacke A ka tacki B, i grafik ove krive je f∗. Kriva g je putanjaod tacke D ka tacki C i njen grafik je g∗. Neka je g1(x) = g(a + b − x).Tada je kriva g1 putanja od tacke C ka tacki D, i vazi g∗1 = g∗. Posmatramoorijentisanu duz BC od tacke B ka tacki C, kao i orijentisanu duz DA odtacke D ka tacki A. Podrazumevamo da su posmatrane duzi proste putanje.Tada je γ = f +BC + g1 +DA, kao i ∂G0
γ = γ∗.Funkcije f i g su neprekidne na [a, b], te su njihovi grafici mere 0 u R2.
Duzi BC i DA su takode mere 0 u R2. Sledi da je m2(γ∗) = 0, te je skup
G0γ merljiv u R2. Funkcije P i Q su neprekidno diferencijabilne u skupu V
i G0γ ⊂ V . Stoga postoji dvostruki integral
∫∫G0
γ
[∂Q(x,y)∂x − ∂P (x,y)
∂y
]dxdy.

3.4. GRINOVA FORMULA U RAVNI 95
Sada je
∫∫G0
γ
∂P
∂ydx dy =
b∫a
dx
g(x)∫f(x)
∂P
∂ydy =
b∫a
[P (x, g(x))− P (x, f(x))] dx
= −∫−g
P dx−∫f
P dx.
Na duzi DA je x = a, odakle sledi dx = 0. Takode, na duzi BC je x = b idx = 0. Znaci, ∫
DA
P dx = 0,
∫BC
P dx = 0.
Stoga je∫∫G
∂P
∂ydx dy = −
∫AB
P dx−∫BC
P dx−∫CD
P dx−∫DA
P dx (3.5)
= −∫γ+P dx. (3.6)
Slicno se dobija ∫γ+
Qdy =
∫∫G
∂Q
∂xdx dy. (3.7)
Sabiranjem poslednje dve jednakosti sledi tvrdenje teoreme.
Teorema moze biti dokazana i u opstijem slucaju.
Teorema 3.4.2. Neka je V prosto povezana oblast u R2, i neka je F =(P,Q) : V → R2 neprekidno diferencijabilno vektorsko polje. Neka je γkontura u V , tako da postoje oblasti G1, . . . , Gk sa sledecim svojstvima:
(1) Oblasti G1, . . . , Gk su elementarne u odnosu na kooridnatne ose;
(2) Gi ∩Gj = ∅ za i = j;
(3) G0γ = G1 ∪ · · · ∪Gk.
Tada je skup G0γ merljiv u R2 i vazi Grinova formula:∫
γ+
F ≡∫γ+
Pdx+Qdz =
∫∫G0
γ
[∂Q(x, y)
∂x− ∂P (x, y)
∂y
]dx dy.
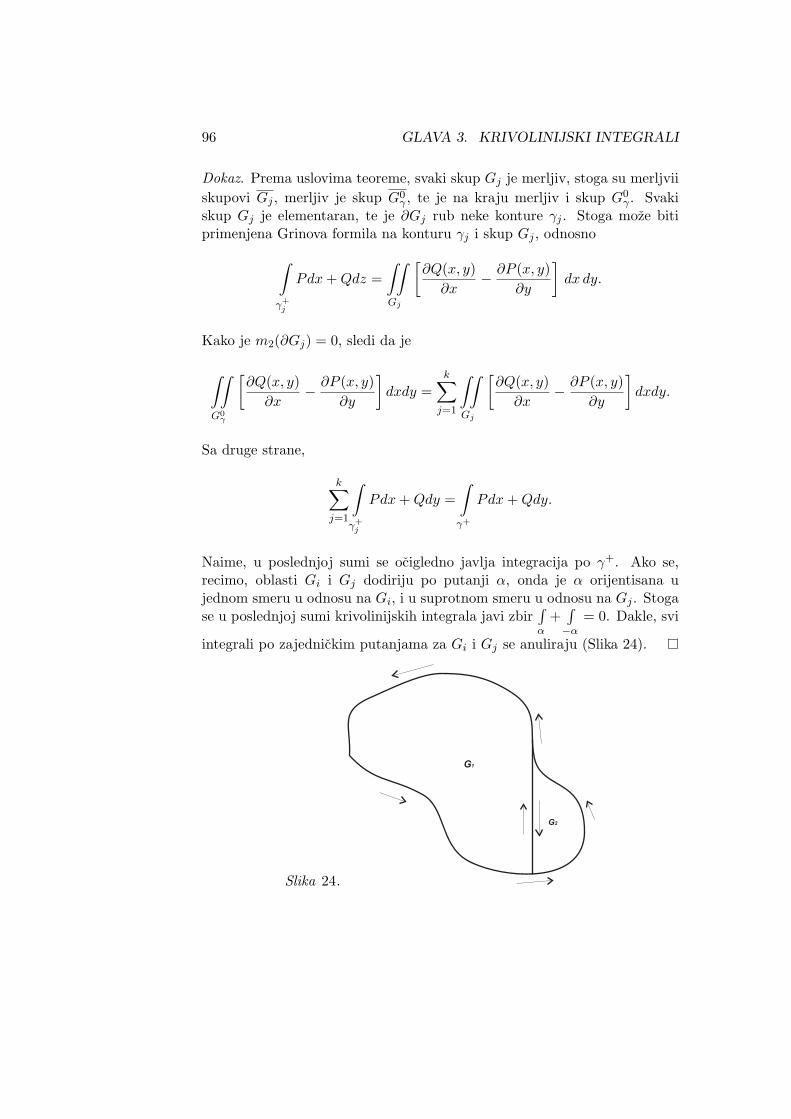
96 GLAVA 3. KRIVOLINIJSKI INTEGRALI
Dokaz. Prema uslovima teoreme, svaki skup Gj je merljiv, stoga su merljvii
skupovi Gj , merljiv je skup G0γ , te je na kraju merljiv i skup G0
γ . Svakiskup Gj je elementaran, te je ∂Gj rub neke konture γj . Stoga moze bitiprimenjena Grinova formila na konturu γj i skup Gj , odnosno∫
γ+j
Pdx+Qdz =
∫∫Gj
[∂Q(x, y)
∂x− ∂P (x, y)
∂y
]dx dy.
Kako je m2(∂Gj) = 0, sledi da je
∫∫G0
γ
[∂Q(x, y)
∂x− ∂P (x, y)
∂y
]dxdy =
k∑j=1
∫∫Gj
[∂Q(x, y)
∂x− ∂P (x, y)
∂y
]dxdy.
Sa druge strane,
k∑j=1
∫γ+j
Pdx+Qdy =
∫γ+
Pdx+Qdy.
Naime, u poslednjoj sumi se ocigledno javlja integracija po γ+. Ako se,recimo, oblasti Gi i Gj dodiriju po putanji α, onda je α orijentisana ujednom smeru u odnosu na Gi, i u suprotnom smeru u odnosu na Gj . Stogase u poslednjoj sumi krivolinijskih integrala javi zbir
∫α+∫−α
= 0. Dakle, svi
integrali po zajednickim putanjama za Gi i Gj se anuliraju (Slika 24).
Slika 24.
G1
G2
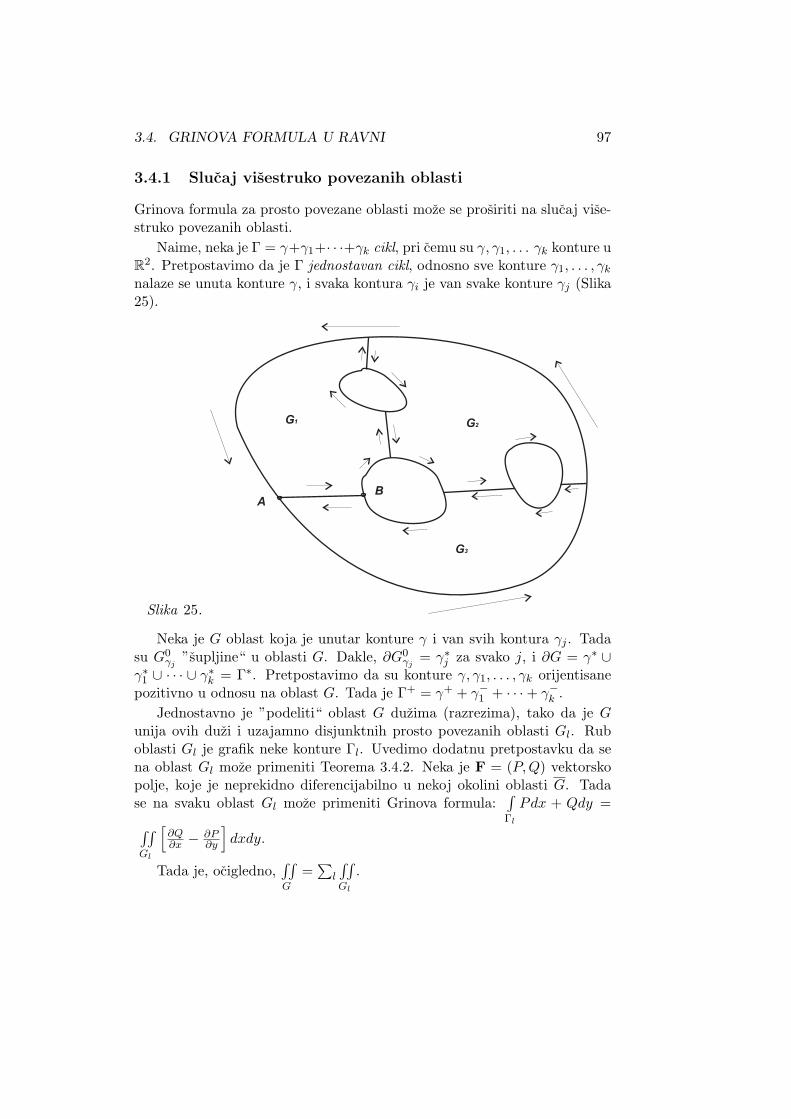
3.4. GRINOVA FORMULA U RAVNI 97
3.4.1 Slucaj visestruko povezanih oblasti
Grinova formula za prosto povezane oblasti moze se prosiriti na slucaj vise-struko povezanih oblasti.
Naime, neka je Γ = γ+γ1+· · ·+γk cikl, pri cemu su γ, γ1, . . . γk konture uR2. Pretpostavimo da je Γ jednostavan cikl, odnosno sve konture γ1, . . . , γknalaze se unuta konture γ, i svaka kontura γi je van svake konture γj (Slika25).
Slika 25.
G1 G2
G3
AB
Neka je G oblast koja je unutar konture γ i van svih kontura γj . Tadasu G0
γj ”supljine“ u oblasti G. Dakle, ∂G0γj = γ∗j za svako j, i ∂G = γ∗ ∪
γ∗1 ∪ · · · ∪ γ∗k = Γ∗. Pretpostavimo da su konture γ, γ1, . . . , γk orijentisanepozitivno u odnosu na oblast G. Tada je Γ+ = γ+ + γ−1 + · · ·+ γ−k .
Jednostavno je ”podeliti“ oblast G duzima (razrezima), tako da je Gunija ovih duzi i uzajamno disjunktnih prosto povezanih oblasti Gl. Ruboblasti Gl je grafik neke konture Γl. Uvedimo dodatnu pretpostavku da sena oblast Gl moze primeniti Teorema 3.4.2. Neka je F = (P,Q) vektorskopolje, koje je neprekidno diferencijabilno u nekoj okolini oblasti G. Tadase na svaku oblast Gl moze primeniti Grinova formula:
∫Γl
Pdx + Qdy =∫∫Gl
[∂Q∂x − ∂P
∂y
]dxdy.
Tada je, ocigledno,∫∫G
=∑
l
∫∫Gl
.

98 GLAVA 3. KRIVOLINIJSKI INTEGRALI
Takode je i∫Γ
=∑
l
∫Γl
. Naime, u poslenjoj sumi krivolinijskih inte-
grala javlja se integracija po Γ. Primetimo da svaka duz (recimo AB) kojaogranicava razlicite skupoveGl i Gt, ima jednu pozitivnu orijentaciju za skupGl, i suprotnu pozitivnu orijentaciju za skup Gt. Prema tome, poslednjasuma krivolinijskih integrala sadrzi sabirak
∫AB
+∫BA
= 0. Dakle, anuliraju
se svi integrali osim po ciklu Γ.
3.4.2 Primena krivolinijskog integrala drugog reda na izra-cunavane povrsine skupa u ravni
Neka je G oblast u R2 ogranicena pozitivno orijentisanim ciklom Γ, tako dase na skup G i cikl γ moze primeniti Grinova formula. Uocimo neprekidnodiferencijabilno vektorsko polje F = (P,Q) na skupuG, za koje vaziQ(x, y) =x i P (x, y) = −y. Na osnovu Grinove formule sledi:
1
2
∫γ+
−y dx+ x dy =
∫∫G
dx dy = m2(G).
Ovim je pokazano da se povrsina merljive oblasti G, na koju se primenjujeGrinova formila, moze izracunati po formuli
m2(G) =1
2
∫∂G+
−y dx+ x dy.
Primer 3.4.1. Naci povrsinu skupa ogranicenog lemniskatom (x2 + y2)2 =a2(x2 − y2) (Slika 26).
Slika 26.
O
a-a
Resenje. Trazimo jednacinu lemniskate u polarnom obliku: x = r cos t,y = r sin t, r > 0, t ∈ [0, 2π]. Jednacina lemniskate jeste r2 = a2 cos 2t.Kako je r2 > 0, sledi da mora biti |t| < π
4 ili 3π4 < t < 5π
4 . Prema tome,parametarske jednacine lemniskate jesu
x = ±a√cos 2t cos t, y = ±a
√cos 2t sin t,
−π4< t <
π
4, ili
3π
4< t <
5π
4.

3.4. GRINOVA FORMULA U RAVNI 99
Kako je cos t > 0 za svako t ∈ (−π/4, π/4), sledi da je jednacinama
x = a√cos 2t cos t, y = a
√cos 2t sin t, t ∈
(−π4,π
4
)(3.8)
odreden deo lemniskate u desnoj poluravni (x ≥ 0). Obzirom da je x(t+π) =−x(t) i y(t + π) = −y(t) sledi da je lemniskata simetricna u odnosu nakoordinatni pocetak. Na osnovu cinjenice x(−t) = x(t) i y(−t) = −y(t)sledi da je lemniskata simetricna u odnosu na x-osu.
Da bi izracunali povrsinu unije dve oblasti ogranicenih lemniskatom(jedna je u levoj, a druga je u desnoj poluravni), dovoljno je izracunatipovrsinu dela oblasti u prvom kvadrantu (x ≥ 0, y ≥ 0). Povrsina unije tihoblasti je
P = 2
∫γ
−y dx+ x dy,
gde je γ = γ1+γ2, γ1 je deo x-ose od (0, 0) do (a, 0), a γ2 je deo lemniskate odtacke (a, 0) do tacke (0, 0) u prvom kvadrantu. Obzirom da je uvek x, y ≥ 0,sledi da je t ∈ (0, π/4). Parametarske jednacine krive γ1 su
x = t, y = 0, t ∈ [0, a],
te je dy = y′dt = 0 i I1 =∫γ1
−y dx + x dy = 0. Kriva γ2 odredena je
navedenim parametarskim jednacinama (3.8) za t ∈(0, π4
)(naime, x je
opadajuca funkcija po t). Takode je
x′ =−a sin t√cos 2t
(3 cos2− sin2 t), y′ =a cos t√cos 2t
(cos2 t− 3 sin2 t).
Na kraju vazi
I2 = 2
∫γ2
−y dx+ x dy = 2a2π/4∫0
(cos4 t− sin4 t)dt = a2.
Prema tome, povrsina unije dveju oblasti ogranicenih lemniskatom jednakaa2.
Primer 3.4.2. Naci povrsinu skupa ogranicenog Dekartovim listom (Slika27)
x =3at
1 + t3, y =
3at2
1 + t3, 0 ≤ t < +∞.
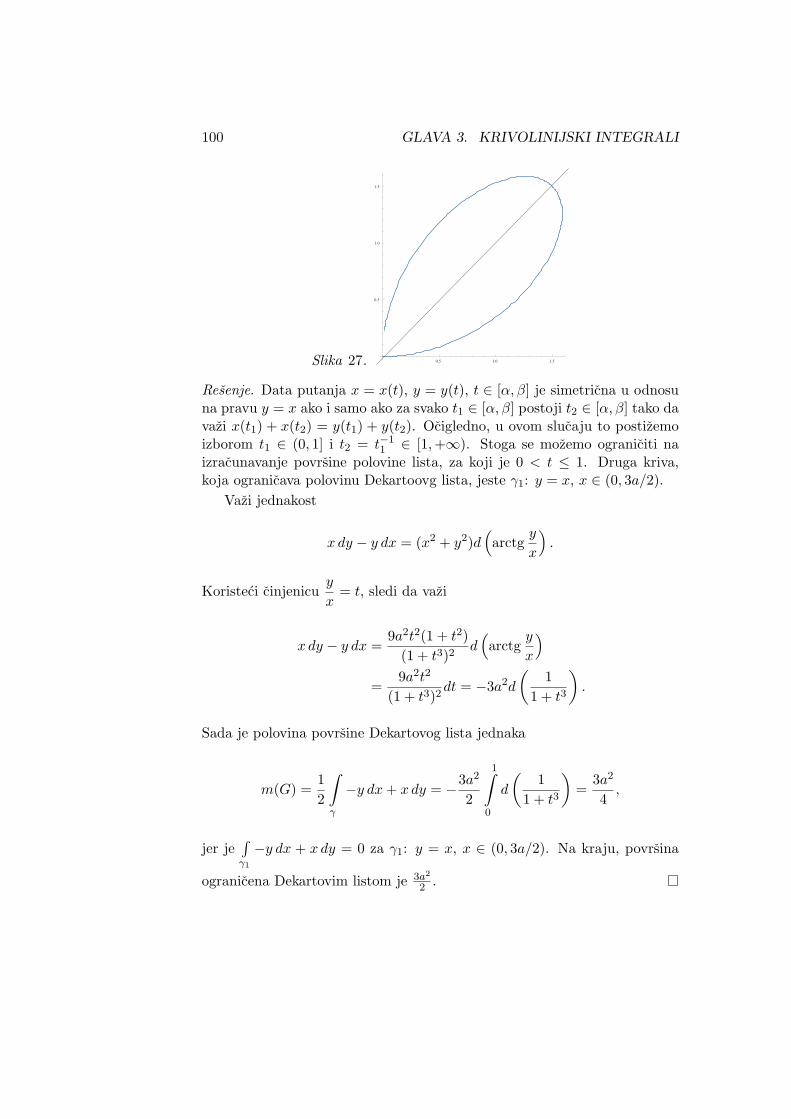
100 GLAVA 3. KRIVOLINIJSKI INTEGRALI
Slika 27. 0.5 1.0 1.5
0.5
1.0
1.5
Resenje. Data putanja x = x(t), y = y(t), t ∈ [α, β] je simetricna u odnosuna pravu y = x ako i samo ako za svako t1 ∈ [α, β] postoji t2 ∈ [α, β] tako davazi x(t1) + x(t2) = y(t1) + y(t2). Ocigledno, u ovom slucaju to postizemoizborom t1 ∈ (0, 1] i t2 = t−1
1 ∈ [1,+∞). Stoga se mozemo ograniciti naizracunavanje povrsine polovine lista, za koji je 0 < t ≤ 1. Druga kriva,koja ogranicava polovinu Dekartoovg lista, jeste γ1: y = x, x ∈ (0, 3a/2).
Vazi jednakost
x dy − y dx = (x2 + y2)d(arctg
y
x
).
Koristeci cinjenicuy
x= t, sledi da vazi
x dy − y dx =9a2t2(1 + t2)
(1 + t3)2d(arctg
y
x
)=
9a2t2
(1 + t3)2dt = −3a2d
(1
1 + t3
).
Sada je polovina povrsine Dekartovog lista jednaka
m(G) =1
2
∫γ
−y dx+ x dy = −3a2
2
1∫0
d
(1
1 + t3
)=
3a2
4,
jer je∫γ1
−y dx + x dy = 0 za γ1: y = x, x ∈ (0, 3a/2). Na kraju, povrsina
ogranicena Dekartovim listom je 3a2
2 .
3.5. NEZAVISNOST INTEGRALA OD PUTANJE INTEGRACIJE 101
3.5 Nezavisnost krivolinijskog integraladrugog reda od putanje integracije(slucaj u ravni)
Neka je u oblasti G ⊂ R2 dato neprekidno vektorsko polje F = (P,Q). PoljeF je potencijalno, ako postoji neprekidno diferencijabilna funkcija U(x, y)na skupu G, tako da je
dU(x, y) = P (x, y) dx+Q(x, y) dy.
U tom slucaju je skalarno polje U potencijal vektorskog polja F.Neka je γ = γ(t), t ∈ [a, b], putanja u oblasti G. Interesuje nas kada
vrednost integrala∫γP dx+Qdy ne zavisi od putanje integracije, vec samo
od pocetne i krajnje tacaka te krive. Odgovor na ovo pitanje daje sledecateorema.
Teorema 3.5.1. Neka je G oblast u R2 i neka je F = (P,Q) neprekidnovektorsko polje u oblasti G. Sledeca tvrdenja su ekvivalentna:
(1)∫L
Pdx+Qdy = 0 za proizvoljnu poligonalnu konturu L u oblasti G.
(2)∫ℓ
P dx+Qdy ne zavisi od poligonalne putanje ℓ koja spaja tacku A
i tacku B, vec samo od tacaka A i B.(3) Polje F = (P,Q) je potencijalno.(4)
∫Γ
Pdx+Qdy = 0 za svaku konturu Γ u G.
Ako vazi bilo koje prethodno tvrdenje i ako je U potencijal vektorskogpolja F = (P,Q), tada vazi∫
γ
P dx+Qdy = U(B)− U(A), (3.9)
pri cemu je γ putaja u oblasti G, tako da je A pocetak, a B kraj krive γ.
Dokaz. (1) =⇒ (2): Neka su A i B dve proizvoljne tacke oblasti G, ℓ1 i ℓ2neka su poligonalne putanje u oblasti G, ciji je pocetak tacka A, a kraj tackaB. Pretpostavimo da ove putanje nemaju tacke preseka. Tada poligonalnaputanja L = ℓ1+ ℓ−2 jeste poligonalna kontura u ravni. Prema pretpostavci,∫L
P dx+Qdy = 0, odnosno
∫ℓ1
Pdx+Qdy =
∫ℓ2
Pdx+Qdy.

102 GLAVA 3. KRIVOLINIJSKI INTEGRALI
Ako ove poligonalne putanje imaju zajednickih tacaka, onda one imajukonacno mnogo zajednickih tacaka. Jednostavno je dokazati tvrdenje i uovom slucaju.
(2) =⇒ (3): Neka su (x0, y0), (x, y) ∈ G proizvoljne tacke, i neka je ℓproizvoljna poligonalna putanja u G koja spaja ove dve tacke. Definisemofunkciju U(x, y) =
∫ℓ
P dx+Qdy. Funkcija U zavisi od izbora tacak (x0, y0)
i (x, y), ali, po pretpostavci, ne zavisi od izbora poligonalne putanje ℓ.Dokazacemo da je U potencijal polja F = (P,Q). Pretpostavimo da jerastojanje izmedu tacaka (x, y) i (x+∆x, y) malo, tako da se ove dve tackemogu spojiti jednom duzi T koja pripada skupu G. Tada, na osnovu adi-tivnosti integrala u odnosu na putanju integracije, vazi
U(x+∆x, y)− U(x, y)
∆x=
1
∆x
∫T
P dx+Qdy.
Duz T je paralelna y-osi, pa je na njoj dy = 0. Prema tome, vazi
U(x+∆x, y)− U(x, y)
∆x=
1
∆x
x+∆x∫x
P (t, y)dt.
Funkcija P je neprekidna, te prema Teoremi o srednjoj vrednosti integrala,
postoji broj ξ izmedu x i x+∆x, tako da vazi 1∆x
x+∆x∫x
P (t, y)dt = P (ξ, y).
Prelaskom na granicnu vrednost kada ∆x→ 0, proizilazi da vazi
∂U(x, y)
∂x= lim
∆x→0
U(x+∆x, y)− U(x, y)
∆x= P (x, y).
Analogno se dokazuje∂U(x, y)
∂y= Q(x, y). Samim tim, U je potencijal polja
F.(3) =⇒ (4): Neka je dU = P dx + Qdy, pri cemu su P i Q neprekidne
funkcije. Neka je Γ proizvoljna kontura u G, cija je parametarska jednacinadata sa x = x(t), y = y(t), t ∈ [a, b]. Tada je
∫Γ
P dx+Qdy =
b∫a
[P (x(t), y(t))x′(t) +Q(x(t), y(t))y′(t)]dt
=
b∫a
d(U(x(t), y(t)) = U(x(b), y(b))− U(x(a), y(a)) = 0.

3.6. MEHANICKI SMISAO KRIVOLINIJSKOG INTEGRALA 103
(4) =⇒ (1): Ova implikacija je trivijalna.Tvrdenje (3.9) sledi na osnovu poslednje formule, pri cemu umesto kon-
ture Γ razmatramo proizvoljnu putanju γ.
Teorema 3.5.2. Neka je oblast G prosto povezana i neka je F = (P,Q)neprekidno diferencijabilno polje u oblasti G. Tada je polje F potencijalnoako i samo ako vazi
∂P (x, y)
∂y=∂Q(x, y)
∂xza svako (x, y) ∈ G. (3.10)
Dokaz. Ako je polje potencijalno i dU = P dx+Qdy, na osnovu neprekidnediferencijabilnosti funkcija P i Q sledi
∂Q
∂x=
∂2U
∂x∂y=
∂2U
∂y∂x=∂P
∂y.
U ovom delu dokaza se ne korsiti prosta povezanost oblasti G.Obrnuto, neka vazi (3.10) i neka je γ proizvoljna kontura u G. Tada
kontura γ ogranicava oblast G1. Obzirom da je G prosto povezana oblast,vazi G1 ⊂ G. Primenom Grinove formule na oblast G1, sledi∫
γ
P dx+Qdy =
∫∫G1
(∂Q
∂x− ∂P
∂y
)dx dy = 0.
Prema prethodnoj teoremi sledi da je polje F potencijalno.
3.6 Mehanicki smisao krivolinijskog integrala dru-gog reda (rad sile)
Neka materijalna tacka M pod dejstvom konstantne sile F prede put ∆s.Obzirom da je sila konstanta, materijalna tacka se krece po duzi, koja je
paralelna jedinicnom vektoru−→l . Tada je rad sile F jednak A = ⟨F,
−→l ⟩∆s.
U opstem slucaju, neka je sila promenljiva, odnosno dato je neprekidnovektorsko polje F = (P,Q,R) u oblasti G, G ⊂ R3. Neka je trajektorijakretanja materijalne tacke data putanjom γ = γ(t), t ∈ [a, b] u oblasti G.Podelimo segment [a, b] tackama (ti)i: a = t0 < t1 < · · · < tn = b. Neka jeℓj duzinu putanje of tacke γ(tj−1) do γ(tj). Neka se materijalna tacka kreceod γ(tj−1) do γ(tj) i neka je u isto vreme vektorsko polje aproksimirano kon-stanom silom F(x(tj), y(tj), z(tj)). Tada je predeni put ℓj priblizno jednakpredenom putu po tangenti i stoga je rad na ovom delu putanje priblizno

104 GLAVA 3. KRIVOLINIJSKI INTEGRALI
jednak Aj ≈ ⟨F(x(tj), y(tj), z(tj)), γ′(tj)⟩∆tj , gde je ∆tj = tj − tj−1. Sadaje rad sile (vektorskog polja) F priblizno jednak
A ≈n∑j=1
⟨F(x(tj), y(tj), z(tj), γ′(tj)⟩∆tj .
Aproksimacija je tacnija, ukoliko je dijametar podele segmenta [a, b] manji.Stoga je rad sile F duz konture γ dat kao krivolinijski integral drugog reda:
A =
∫γ
⟨F, dγ⟩ =b∫a
⟨F(x(t), y(t), z(t)), γ′(t)⟩dt.
Primer 3.6.1. Naci rad sile F = − γ
|γ|3, gde je γ = (x, y, z), pri cemu se
tacka krece po putanji γAB koja spaja tacke A i B, i pri tome putanja neprolazi kroz koordinatni pocetak.
Resenje. Kriva γ data je jednacinom γ = γ(t), t ∈ [a, b]. Na osnovuprethodne formule, rad sile se izracunava na sledeci nacin:
A =
∫γAB
⟨F, dγ⟩ = −b∫a
⟨(x, y, z), (x′, y′z′)⟩(x2 + y2 + z2)3/2
dt
= −b∫a
xx′ + yy′ + zz′
(x2 + y2 + z2)3/2dt
Ako se krace oznaci u2 = x2 + y2 + z2, tada je
A = −b∫a
u du
u3=
b∫a
d
(1
u
)=
1
u(b)− 1
u(a)=
1
|γ(b)|− 1
|γ(a)|.
Glava 4
Povrsinski integrali
4.1 Povrsi u R3
Definicija 4.1.1. Povrs u R3 je neprekidno preslikavanje S : G → R3, pricemu je G ogranicena oblast u R2. Promenljive u i v jesu parametri povrsiS.
Skup S∗ = S(u, v) : (u, v) ∈ G je slika (grafik) povrsi S.
Povrs S : G → R3, je neprekidno diferencijabilna, ako su koordinatnefunkcije (u, v) 7→ x(u, v), (u, v) 7→ y(u, v) i (u, v) 7→ z(u, v) neprekidnodiferencijabilne funkcije.
Ako je G ogranicena oblast u R2, (u, v) ∈ G, i ako je D = (x, y) : G→ Rneprekidno diferencijabilno preslikavanje, tada je Jakobijan preslikavanja Ddefinisan kao
J(D) =
∣∣∣∣∂x∂u ∂x∂v
∂y∂u
∂y∂v
∣∣∣∣ .Ocigledno je J(D) : G→ R neprekidno preslikavanje.
Definicija 4.1.2. Neka je G oblast u R2, i neka je D : G → R neprekidnodiferencijabilno preslikavanje. Preslikavanje D je regularno, ako je J(D) = 0na G.
Teorema 4.1.1. Ako je G oblast u R2, i ako je D : G → R2 regularnopreslikavanje, tada je D(G) otvoren skup u R2.
Definicija 4.1.3. Ako je D : G → D(G) regularno preslikavanjnje, koje jeinvertibilno, i ako je D−1 : D(G) → G takode regularno preslikavanje, tadaje D regularan difeomorfizam (iz G na D(G)).
105

106 GLAVA 4. POVRSINSKI INTEGRALI
Definicija 4.1.4. Neka su G1, G2 ogranicene oblasti u R2, i neka su S1 :G1 → R2 i S2 : G2 → R2 neprekidno diferencijabilne povrsi. Povrsi S1
i S2 su ekvivalentne, u oznaci S1 ∼ S2, ako postoji obostrano regularandifeomorfizam D : G1 → G2, tako da je S1 = S2 D.
Teorema 4.1.2. Relacija ∼ je relacija ekvivalencije u skupu svih povrsiprostora R3. Ako je S1 ∼ S2, onda je S∗
1 = S∗2.
Definicija 4.1.5. (uproscena definicija) Neka je G ogranicena oblast u R2
i neka je S : G→ R3 povrs. Skup ρS = S(∂G) je prividni rub povrsi S.Skup rS =
∩S1∼S
ρS1 je rub povrsi S, pri cemu je presek uzet po svim
povrsima S1 koje su ekvivalentne povrsi S.
Definicija 4.1.6. Skup S = S∗ \ rS je unutrasnost povrsi.
Primer 4.1.1. Neka je je povrs S odredena jednacinama
x = R cosu sin v, y = R sinu sin v, z = R cos v,
pri cemu je(u, v) ∈ G = [0, 2π]× [0, π],
odnosno S(u, v) = (x(u, v), y(u, v), z(u, v)). Tada je S sfera poluprecnika Rsa centrom u koordinatnom pocetku.
Tacka A = S(0, 0) = (0, 0, 1) ima svojstvo A ∈ ρS. Medutim, ako seposmatra ekvivalentna povrs S1 data kao
x = R cosu sin v, y = R sinu sin v, z = R cos v,
pri cemu je(u, v) ∈ G1 = [−π, π]× [−π/2, π/2],
tada A /∈ ρS1.Dakle, A nije rubna tacka povrsi S, te je A ∈ S.Lako je utvrditi da povrs S nema rubnih tacaka.
Pretpostavimo da je G ogranicena oblast u R2, i neka je S : G → R3
neprekidno diferencijailna povrs. Neka je (u0, v0) ∈ G proizvoljna tacka.Ako fiksiramo samo jednu koordinatu, recimo koordinatu v0, tada funckijau 7→ S(u, v0), u ∈ [a, b], predstavlja krivu (putanju) na povrsi S. Slicno,v 7→ S(u0, v), v ∈ [c, d], predstavlja takode krivu (putanju) na povrsi S.Obe ove krive prolaze kroz tacku M0 = S(u0, v0). Ove krive se nazivajukoordinatne linije povrsi. Tangentni vektori ovih krivih u tacki M0 jesuSu(u0, v0) i Sv(u0, v0).

4.1. POVRSI U R3 107
Definicija 4.1.7. Tacka M0 = S(u0, v0) je neosobena tacka povrsi S, akosu tangentni vektori Su(u0, v0) i Sv(u0, v0) nekolinearni. Ako su pomenutitangentni vektori kolinearni, onda je M0 osobena tacka povrsi.
Neka je ρ : [a, b] → G neprekidno diferenciajbilno preslikavanje, odnosnokriva (putanja) u skupu G. Tada je t 7→ S(ρ(t)), t ∈ [a, b], neprekidno difer-encijabilno preslikavanje (kao kompozicija neprekidno diferencijabilnih pres-likavanja), kojim je odredena kriva Γ na povrsi S, odnosno Γ(t) = S(ρ(t)),t ∈ [a, b].
Ako postoji t0 ∈ [a, b] tako da je ρ(t0) = (u0, v0), tada je Γ kriva napovrsi S kroz tacku M0.
Tangenta krive Γ u tacki M0 jeste dΓ(t0) = Γt(t0)dt. Diferencijal vek-torske funkcije Γ u tacki t0 jeste
dΓ = Su(u0, v0)du(t0)+Sv(u0, v0)dv(t0) = Su(u0, v0)u′(t0)dt+Sv(u0, v0)v
′(t0)dt
. Primetimo da vazi invarijantnost forme diferencijala prvog reda u odnosuna smenu promenljivih.
Dakle, vektor Γt(t0) jeste linearna kombinacija vektora Su(u0, v0) i Sv(u0, v0),ako je ako je M0 neosobena tacka povrsi S.
Definicija 4.1.8. Ravan T kroz tackuM0 povrsi S je tangentna ravan povrsiS, ako tangentni vektor svake krive na povrsi, koja prolazi kroz tacku M0,pripada ravni T .
Ako je M0 neosobena tacka povrsi S, tada se svaki tangentni vektor bilokoje krive na povrsi S kroz tacku M0, moze prikazati kao linearna kombi-nacija vektora Su(u0, v0) i Sv(u0, v0). Prema tome, Su(u0, v0) i Sv(u0, v0)su dva linearno nezavisna vektora tangentne ravni T u neosobenoj tackiM0 povrsi S. Normala ravni T data je kao vektorski proizvod tangentnihvektora koordinatnih linija, odnosno
N = Su × Sv =
∣∣∣∣∣∣i j kxu yu zuxv yv zv
∣∣∣∣∣∣ .Vekor N je vektor normale povrsi S u tacki M0.
Jednacina ravni T data je sa (r− r0) ·N = 0, odnosno
(r− r0) · (ru × rv) = [r− r0, ru, rv] = 0,

108 GLAVA 4. POVRSINSKI INTEGRALI
gde je sa r oznacen radijus vektor proizvoljne tacke na ravni, a r0 = S(M0).Drugi zapis jednacine ravni jeste∣∣∣∣∣∣
x− x0 y − y0 z − z0xu yu zuxv yv zv
∣∣∣∣∣∣ = 0.
Povrs S moze biti data ekslicitno, na primer z = f(x, y), (x, y) ∈ G.Ovako zadate povrsi se svode na prethodni slucaj ociglednom smenom x = u,y = v, z = f(u, v). Ako je funkcija (x, y) 7→ f(x, y) neprekidno diferencija-bilna, onda je vektor normale povrsi
N =
∣∣∣∣∣∣i j k1 0 fx0 1 fy
∣∣∣∣∣∣ .Jednacina tangente ravni data je sa∣∣∣∣∣∣
x− x0 y − y0 z − z01 0 fx0 1 fy
∣∣∣∣∣∣ = 0.
Povrs moze biti zadana i implicitno, jednacinom
F (x, y, z) = 0.
Ako prethodna jednacina imlplicitno odreduje z kao funkciju od x i y,odnosno z = f(x, y), i ako je F (x, y, z) neprekidno diferencijabilna funkcija,dobro je poznato da vazi
fx = −FxFz, fy = −Fy
Fz.
Lako je proveriti da je tangentna ravan data jednacinom:
(x− x0)Fx + (y − y0)Fy + (z − z0)Fz = 0.
Definicija 4.1.9. Prava L, koja prolazi kroz tacku M0 povrsi S i pri tomje normalna na tangentnu ravan povrsi u tacki M0, jeste normala povrsi Su tacki M0.
Vektor paralelnosti normale L jeste N. Prema tome, jednacina normaleL jeste:
x− x0∣∣∣∣yu zuyv zv
∣∣∣∣ =y − y0
−∣∣∣∣xu zuxv zv
∣∣∣∣ =z − z0∣∣∣∣xu yuxv yv
∣∣∣∣ .

4.2. PRVA KVADRATNA FORMA POVRSI I POVRSINA POVRSI 109
Ako je povrs data eksplicitno x = u, y = v i z = f(u, v), tada je jednacinanormale L:
x− x0fx
=y − y0fy
=z − z0−1
.
Konacno, ako je povrs data implicitno jednacinom F (x, y, z) = 0, tadaje jednacina normale L
x− x0Fx
=y − y0Fy
=z − z0Fz
.
Definicija 4.1.10. Neprekidno diferencijabilna povrs je glatka, ako nemaosobenih tacaka.
Neka je G ogranicena oblast u R2, i neka je S : G → R3 povrs. Pret-postavimo da postoje olasti G1, . . . , Gn sa sledecim osobinama:
(1) G =∪nj=1Gj ;
(2) Gi ∩Gj = ∅ za i = j.
Za svako j ∈ 1, . . . , n neka je Sj restrikcija od S na Gj , odnosnoSj(u, v) = S(u, v) za (u, v) ∈ Gj . Tada je Sj deo povrsi S. FamilijaS1, . . . ,Sn je razbijanje povrsi S.
Definicija 4.1.11. Neka je, pod prethodno opisanim uslovima, S neprekidnopreslikavanje na G, i S neprekidno diferencijabilno preslikavanje na svakomskupu Gj , j = 1, . . . , n. Tada je S deo po deo glatka povrs.
Pod uslovima prethodne definicije, glatkost povrsi je eventualno narusenau tackama ∂Gj , j = 1, . . . , n.
4.2 Prva kvadratna forma povrsi i povrsina povrsi
U ovoj lekciji pretpostavljamo da je G ogranicena oblast u R2. Neka jeS : G → R3 glatka povrs, i M = S(u, v) neka je jedna tacka na povrsiS. Koristeci oznake iz prethodne lekcije, izracunavamo intenzitet vektoradS = Sudu+ Svdv:
|dS|2 = dS · dS = Su · Sudu2 + 2Su · Svdudv + S · Svdv2,
ili, uz oznake E = Su · Su, F = Su · Sv, G = Sv · Sv,
|dS|2 = Edu2 + 2Fdudv +Gdv2. (4.1)

110 GLAVA 4. POVRSINSKI INTEGRALI
Koeficijenti E,F,G se izracunavaju na sledeci nacin:
E = (xu)2 + (yu)
2 + (zu)2,
F = xuxv + yuyv + zuzv,
G = (xv)2 + (yv)
2 + (zv)2.
Definicija 4.2.1. Ako je S glatka povrs, onda je izraz (4.1) prva kvadratna(fundamentalna) forma povrsi S.
Pokazacemo kako se racuna povrsina povrsi. Podelimo ravan R2, kojojpripada skup G, pravama paralelnim koordinatnim osama promenljvih u i v.Neka je rastojanje izmedu susednih pravih jednako h. Pretpostavimo da jeG merljiva oblast, odnosno postoji m2(G). Tacka A ∈ G neka je presek dvemedusobno normalne prave i neka je M = S(A). Uocimo tangentne vektoreSu i Sv u tacki M . Tada povrsini jednog kvadrata u skupu G pribliznoodgovara povrsina jednog krivolinijskog kvadrata na povrsi (za glatke povrsiovo je dobra aproksimacija povrsine). Ako je A = (u0, v0), onda su ostaletacke kvadrata u ravni date kao B = (u0+h, v0), C = (u0+h, v0+h) i D =(u0, v0+h). Pored uvedene oznakeM = S(A), neka je N = S(B), P = S(C)i Q = S(D). Posmatramo Tejlorove razvoje funckija jedne promenljive:
x(u, v0) = x(u0, v0) + xu(u0, v0)h+ o(h),
a slicno i za funkcije y(u, v0) i z(u, v0). Krace, u vektorskom obliku zapisano,vazi
S(u, v0) = S(u0, v0) + Su(u0, v0)h+ o(h).
Takode je
S(u0, v) = S(u0, v0) + Sv(u0, v0)h+ o(h).
Krivolijinskom kvadratuMNPQ pridruzimo paralelogram u tangentnoj ravni,odreden vektorima Suh i Svh. Tada je povrsina krivolinijskog kvadrata pri-blizno jednaka povrsini paralelograma, odnosno
∆ = |Suh× Svh|P = |Su × Sv|Ph2 = |Su × Sv|Pm2(E),
pri cemu je sa E oznacen kvadrat ABCD. Ako su kvadrati unutar skupaG oznaceni sa Ei, i = 1, . . . , n, tada je povrsina svih krivolinijskih kvadratana povrsi S priblizno jednaka
n∑i=1
∆i =n∑i=1
|Su × Sv|Pim2(Ei).

4.2. PRVA KVADRATNA FORMA POVRSI I POVRSINA POVRSI 111
Granicna vrednost ove sume kada h → 0, jednaka je povrsini povrsi S. Naosnovu definicije dvostrukog Rimanovog integrala funkcije dve promenljivepo skupu G, sledi da vazi
m(S) = limh→0
n∑i=1
∆i = limh→0
n∑i=1
|Su × Sv|Pim2(Ei) =
∫∫G
|Su × Sv|dudv.
Sada treba pronaci pogodniji oblik za izracunavanje |Su × Sv|Pi .Neka je φ ugao koji zaklapaju vektori Su i Sv u tacki Pi. Tada je dobro
poznato da vazi
|Su × Sv| = |Su||Sv| sinφ, Su · Sv = |Su||Sv| cosφ,
odakle sledi
|Su × Sv|2 = |Su|2|Sv|2 − (Su · Sv)2 = EG− F 2.
Prema tome, povrsina povrsi S data je formulom
m(S) =
∫∫G
√EG− F 2 du dv.
Specijalno, ako je povrs data eksplicitno, z = f(x, y), tada je
m(S) =
∫∫G
√1 + f2x + f2y dx dy.
Nastavljamo sa proucavanjem glatkih povrsi. Vektor normale glatkepovrsi S, cija je reprezentacija data sa S = S(u, v), (u, v) ∈ G, jesteN = Su × Sv. Neka je n jedinicni vektor normale, odnosno
n =Su × Sv|Su × Sv|
.
Definicija 4.2.2. Ako je jedinicni vektor normale glatke povrsi neprekidnafunkcija parametara u i v, onda je taj vektor orijentacija glatke povrsi.
Ako je povrs S glatka i ima tacaka samopreseka, onda u tim tackamapovrs S ima po dve normale i time je narusena neprekidnost vektora normaleu zavisnosti od parametara povrsi.
Sa druge strane, ako je n orijentacija neke povrsi, mose se odabrati idruga orijentacija −n.

112 GLAVA 4. POVRSINSKI INTEGRALI
Definicija 4.2.3. Glatka povrs je orijentisana, ako je na toj povrsi izabranajedna od mogucih dveju orijentacija.
Definicija 4.2.4. Tacka M0 = S(u0, v0) povrsi S je konusna tacka, akoje funkcija S neprekidno diferencijabilna u prstenu P ((u0, v0); 0, R), ali ovafunkcija nije neprekidno diferencijabilma u disku D((u0, v0);R).
Primer 4.2.1. Konus je dat jednacinom z2 = x2+y2, gde je, na primer, x2+y2 ≤ 1. Povrs konusa jeste skup S∗ = (x, y,
√x2 + y2) : (x, y) ∈ D(0; 1),
gde je D(0; 1) jedinicni disk u ravni sa centrom u koordinatnom pocetku.
Tangentni vektori koordinatnih linija dati su sa Sx =
(1, 0, x√
x2+y2
)i Sy =(
0, 1, y√x2+y2
)za svako (x, y) ∈ D(0; 1) \ (0, 0). Vektori normale u tim
tackama jesu
N = Sx × Sy =
∣∣∣∣∣∣∣∣i j k1 0 x√
x2+y2
0 1 y√x2+y2
∣∣∣∣∣∣∣∣ = − x√x2 + y2
i− y√x2 + y2
j+ k.
Ocigledno vazi |N| =√2. Prema tome, svaka tacka povrsi S, osim vrha
konusa, jeste neosobena tacka, dok je vrh konusa konusna tacka povrsi S.Takode je jedinicni vektor normale jedne od mogucih orijentacija povrsi S
dat kao n =
(− x√
2(x2+y2),− y√
2(x2+y2), 1√
2
).
U mnogim primenama koriste se povrsi sa konacno mnogo konusnihtacaka. Na primer, neka su S(ui, vi), i = 1, . . . , k, sve konusne tacke povrsiS, i neka je povrs S glatka u svim ostalim tackama, odnosno glatka u skupuG1 = G\(u1, v1), . . . , (uk, vk). Svaka neprekidna jedinicna normala povrsina skupu G1 jeste orijentacija povrsi S.
Ukoliko se na povrsi moze izabrati jedna od dveju orijentacija, onda jepovrs dvostrana. Ukoliko se to ne moze uraditi, povrs je jednostrana.
Primer povrsi koja se ne moze orijentisati jeste Mebijusova traka. Neka jepravougaonik Π u prostoru sa temenima redom A, B, C i D. Pretpostavimoda je pravougaonik Π transformisan u prostoru, tako da se teme A poklopisa temenom C, a teme B se poklopi sa temenom D. Tako dobijena povrsu prostoru jeste Mebijusova traka. Lako je proveriti da je ovako dobijenapovrs jednostrana.
Postoje povrsi koje imaju rub, a takode postoje povrsi koje nemaju rub.Rub povrsi u primenama bice uvek kontura. Od posebnog je interesa je ori-

4.3. POVRSINSKI INTEGRALI PRVOG REDA 113
jentisati rub orijentisane povrsi, glatke u unutrasnjosti, sa izuzatkom even-tualno konacno mnogo konusnih tacaka.
Neka je rub oblasti G grafik neke konture γ = γ(t), t ∈ [a, b]. Pret-postavimo da je kontura γ orijentisana pozitivno u odnosu na oblast G,odnosno prilikom kretanja po konturi u smeru rasta parametra, oblast G os-taje sa leve strane. Neka je S glatka povrs sa rubom, sa izuzetkom konacnomnogo konusnih tacaka. U ovom slucaju rub povrsi S jeste grafik deo podeo glatke krive Γ(t) = S(γ(t)), t ∈ [a, b]. Takode pretpostavimo da se povrsS moze orijentisati izborom neprekidnog jedinicnog vektora normale.
Rub Γ povrsi S jeste orijentisan saglasno izboru vektora normale povrsiS, ako pri kretanju krivom Γ u smeru rasta parametra, orijentisana stranapovrsi S ostaje sa leve strane.
Postupak orijentacije povrsi i ruba moze se shvatiti i obrnuto: kriva γ jepozitivno orijentisana u odnosu na oblast G, kriva Γ = S γ je orijentisanasaglasno orijentaciji krive γ, a na povrsi S izabrana je orijentacija n =Su(t)× Sv(t)
|Su(t)× Sv(t)|.
4.3 Povrsinski integrali prvog reda
Neka je G ogranicena merljiva oblast u R2, i neka je S : G → R3 glatkapovrs. Neka je G =
∪ki=1Gi razbijanje skupa G na pravama paralelnim
koordinatnim osama, a Si = S|Gi , i = 1, . . . , k, neka su odgovarajuci delovipovrsi S. Neka su ξi ∈ Si proizvoljne tacke, a m(Si) povrsine delova povrsiSi, i = 1, . . . , k.
Na kraju pretpostavimo da je data funkcija f : S∗ → R.Posmatrajmo sumu
k∑i=1
f(ξi)m(Si). (4.2)
Ranije je pokazano kako se izracunava povrsina povrsi na osnovu prve kvadratneforme. Stoga nije tesko proveriti da je upravo napisana suma (4.2) zapravoRimanova integralna suma dvostrukog integrala∫∫
G
f(x(u, v), y(u, v), z(u, v))√EG− F 2 du dv =
∫∫S
f ≡∫∫S
fdS (4.3)
gde su E,F,G koeficijenti prve kvadratne forme povrsi S. Dodatna pret-postavka, naravno, jeste da pomenuti integral postoji.

114 GLAVA 4. POVRSINSKI INTEGRALI
Integral (4.3) jeste povrsinski integral prvog reda funkcije f(x, y, z) popovrsi S. Ako navedeni integral postoji, onda je realna funkcija f integra-bilna na S.
Na primer, ako je f neprekidna funkcija na S, tada je f integrabilna naS. Naime, u ovom slucaju integralimo neprekidnu funkciju na kompaktnommerljivom skupu G.
Ne gubimo od opstosti ako pretpostavimo da je S deo po deo glatka. Nataj nacin izvodi, koji se javljaju u koeficijentima E,F,G nece biti definisanina nekom skupu u ravni, a mera ovog skupa je nula. Ova pretpostavka neutice na vrednost integrala.
Svojstva povrsinskog integrala prvog reda analogna su svojstvima krivolin-ijksog integrala prvog reda. Preciznije, povrsinski integral prvog reda nezavisi od parametarske reprezentacije povrsi S, a takode ne zavisi od ori-jentacije povrsi.
Primer 4.3.1. Izracunati povrsinski integral prvog reda∫∫S
dS(1+z)2
, ako je S
polusfera x2 + y2 + z2 = 1, z ≥ 0.
Resenje. Jednacina gornje polusfere u sfernim koordinatama je
x = cosφ sinψ, y = sinφ sinψ, z = cosψ, φ ∈ [0, 2π), ψ ∈ [0, π/2].
Koeficijenti prve kvadratne forme ove povrsi jesu
E = (xφ)2 + (yφ)
2 + (zφ)2 = sin2 ψ, F = xφxψ + yφyψ + zφzψ = 0,
G = (xψ)2 + (yψ)
2 + (zψ)2 = 1.
Prema tome, trazeni integral jeste:
I =
2π∫0
dφ
π/2∫0
sinψ
(1 + cosψ)2dψ = π.
Primer 4.3.2. Izracunati povrsinski integral prvog reda I =∫∫S
(xy + yz +
zx)dS, gde je S deo konusa z =√x2 + y2, koji je ogranicen cilindrom
x2 + y2 = 2x.
Resenje. Uvodimo cilindricne koordinate:
x = r cosφ, y = r sinφ, z = ξ, φ ∈ [−π, π), r > 0, ξ ∈ R.

4.4. POVRSINSKI INTEGRALI DRUGOG REDA 115
Jednacina konusa u cilindricnim koordinatama je ξ = r. Unutrasnjost cilin-dra dobija se na osnovu nejednacine x2 + y2 ≤ 2x, odakle sledi r ≤ 2 cosφ iφ ∈ (−π/2, π/2). Parametarske jednacine povrsi jesu
x = r cosφ, y = r sinφ, z = r, φ ∈ (−π/2, π/2), r ∈ (0, 2 cosφ).
Koeficijenti prve kvadratne forme ove povrsi su
E = (xr)2 + (yr)
2 + (zr)2 = 2, F = xrxφ + yryφ + zrzφ = 0,
G = (xφ)2 + (yφ)
2 + (zφ)2 = r2.
Trazeni integral je jednak
I =√2
π/2∫−π/2
dφ
2 cosφ∫0
r3(1
2sin 2φ+ sinφ+ cosφ
)dr
= 4√2
π/2∫−π/2
sinφ cos5 φdφ+ 4√2
π/2∫−π/2
sinφ cos4 φdφ
+ 4√2
π/2∫−π/2
cos5 φdφ.
Prva dva integrala su jednaka nuli, jer se integrale neparne funkcije nasegmentu simetricnom u odnosu na koordinatni pocetak. Prema tome,
I =64
√2
15.
4.4 Povrsinski integrali drugog reda
U ovoj lekciji definisemo integrale koji zavise od orinetacije povrsi.Neka je G ogranicena i merljiva oblast u R2. Neka je povrs S : G →
R3 deo po deo glatka i orijentisana nekim vektorom normale n. Ovakoorijentisana povrs oznacava se sa S+. Kao u prethodnom delu, posmatra serazbijanje oblasti G =
∪ki=1Gi i odgovarajuci delovi povrsi Sj = S|Gj . Neka
su date proizvoljne tacke ξi ∈ Si, i = 1, . . . , k. Sa ∠(n,k) oznvacava se ugaokoji vektor normale n zaklapa sa pozitivnim delom z-ose. Neka je funkcijaf : S∗ → R definisana S. Posmatra se suma
k∑i=1
f(ξi) cos∠(n,k)m(Si).
116 GLAVA 4. POVRSINSKI INTEGRALI
Prethodna suma je Rimanova integralna suma koja odovara integralu∫∫D
P (x(u, v), y(u, v), z(u, v)) cos∠(n,k)√EG− F 2 du dv =
=
∫∫S
f cos∠(n,k) dS,
u slucaju da ovaj integral postoji. Ukoliko navedeni integral postoji, funkcijaf je integrabilna na S u odnosu na z-osu.
Koristimo oznaku∫∫S+
f dx dy =
∫∫S
f cos∠(n,k) dS
i ovaj integral jeste povrsinski integral drugog reda (u odnosu na z-osu)funkcije f(x, y, z) po orijentisanoj povrsi S+.
Ako je f neprekidna funkcija na S∗, onda navedeni dvojni integrla pos-toji, jer je funckija koja se integrali neprekidna na merljivom i kompaktnomskupu G, sa izuzetkom, eventualno, nekog skupa koji je mere nula.
Ovako definisan integral ne zavisi od parametarske reprezentacije povrsiS. Na osnovu ocigledne jednakosti
cos∠(−n,k) = − cos∠(n,k),sledi da povrsinski integral menja znak ako se promeni orijentacija povrsi.Neka je S− povrs orijentisana vektorom −n. Tada vazi∫∫
S−
f dx dy = −∫∫S+
f dx dy.
Analogno se definisu integrali u odnosu na preostale ose:∫∫S+
f dy dz =
∫∫S
f cos∠(n, i) dS,
∫∫S+
f dz dx =
∫∫S
f cos∠(n, j) dS.
Neka je a = (P,Q,R) neprekidno vektorsko polje definisano na deo podeo glatkoj i orijentisanoj povrsi S, odnosno funkcije P , Q i R su definisanei neprekidne na S∗. Tada je∫∫
S+
a =
∫∫S+
P dy dz +
∫∫S+
Q dz dx+
∫∫S+
R dx dy.

4.4. POVRSINSKI INTEGRALI DRUGOG REDA 117
Potrebno je naci efikasan nacin za izracunavanje kosinusa uglova koje nor-mala n zaklapa sa pozitivnim smerovima koordinatnih osa. Kako je n je-dinicni vektor normale, odnosno
n =Su × Sv|Su × Sv|
,
onda vazi
cos∠(n,k) = n · k|n||k|
=Su × Sv|Su × Sv|
· k =k
|Su × Sv|
∣∣∣∣∣∣i j kxu yu zuxv yv zv
∣∣∣∣∣∣=
1
|Su × Sv|
∣∣∣∣xu yuxv yv
∣∣∣∣ = 1√EG− F 2
· D(x, y)
D(u, v).
Nedostatak ove formule je u tome sto zamena mesta promenljvim u iv dovodi do promene znaka poslednje determinante. Stoga se zahteva daugao izmedu vektora n i k pripada segmentu [0, π/2], cime se obezbedujecos∠(n,k) ≥ 0. Prema tome, uz uslov ∠(n,k) ∈ [0, π/2], vazi formula
cos∠(n,k) = 1√EG− F 2
·∣∣∣∣D(x, y)
D(u, v)
∣∣∣∣ .Konacno, vaze formule∫∫
S+
R dx dy =
∫∫G
R
∣∣∣∣D(x, y)
D(u, v)
∣∣∣∣ dudv, ∠(n,k) ∈ [0, π/2].
Analogno∫∫S+
P dy dz =
∫∫G
P
∣∣∣∣D(y, z)
D(u, v)
∣∣∣∣ dudv, ∠(n, i) ∈ [0, π/2],
∫∫S+
Q dz dx =
∫∫G
Q
∣∣∣∣D(x, z)
D(u, v)
∣∣∣∣ dudv, ∠(n, j) ∈ [0, π/2].
Primer 4.4.1. Izracunati povrsinski integral∫∫S+
z dx dy+ y dz dx+ x dy dz,
gde je S spoljasnja strana sfere x2 + y2 + z2 = R2.
Resenje. Uvodenjem sfernih koordinata lako se utvrduje da su parametarskejednacine sfere date kao
x = R cosφ sinψ, y = R sinφ sinψ, z = R cosψ,
φ ∈ [0, 2π], ψ ∈ [0, π].

118 GLAVA 4. POVRSINSKI INTEGRALI
Neka je I1 =∫∫S+
z dx dy. Prema pretpostavci zadatka, orijentisana je spoljna
strane sfere. Ukoliko se neka tacka nalazi na gornjoj polusferi (z ≥ 0), tadavektor normale sfere u toj tacki zaklapa ostar ugao (odnosno najvise π/2) sapozitivnim smerom z-ose. Ukoliko se tacka nalazi na donjoj poluferi, tadavektor normale sfere u posmatranoj tacki zaklapa tup ugao sa pozitivinimsmerom z-ose. Prema tome,
I1 =
∫∫S+1
z dx dy −∫∫S−2
z dx dy,
pri cemu je S+1 gornja polusfera orijentisana spolja, a S−
2 je donja polusferaorijentisana unutra. Gornja polusfera se dobija iz parametarskih jednacinasfere za ψ ∈ [0, π/2], a donja polusfera se dobija za ψ ∈ [π/2, π]. Vazi∣∣∣∣D(x, y)
D(φ,ψ)
∣∣∣∣ = R2
2| sin 2ψ|.
Ako je ψ ∈ [0, π/2], tada je sin 2ψ > 0 i vazi
I11 =
∫∫S+1
z dx dy =
2π∫0
dφ
π/2∫0
R3 sinψ cos2 ψ dψ =2
3R3π.
Ako je ψ ∈ (π/2, π), tada je sin 2ψ < 0 i
I12 = −∫∫S−2
z dx dy = −2π∫0
dφ
π∫π/2
R3 cos2 ψ(− sinψ) dψ =2
3R3π.
Prema tome I1 =4
3R3π. U ovom zadatku promenljive x, y i z mogu
promeniti mesta, uzimajuci ubzir i podintegralnu funkciju i domen inte-gracije. Prema tome, svi preostali integrali jednaki su integralu I1:∫∫
S+
y dx dz =
∫∫S+
x dy dz = I1 =4
3R3π.
Konacan rezultat jeste I = 4R3π.
Primer 4.4.2. Izracunati integral∫∫S+
yz dx dy + xz dy dz + xy dx dz, ako je
S+ spoljna strana tela ogranicenog povrsima x2 + y2 = R2, x = 0, y = 0,z = 0, z = a, R, a > 0.

4.4. POVRSINSKI INTEGRALI DRUGOG REDA 119
Resenje. Povrs S se moze prikazati kao unija S = S1 + S2 + S3 + S4 + S5,pri cemu je S1 deo povrsi koji pripada cilindru, S2 je deo koji pripada ravniz = 0, S3 je deo koji pripada ravni z = a, S4 je deo koji pripada razni x = 0i S5 je deo koji pripada ravni y = 0.
Parametarske jednacine povrsi S1 jesu
x = R cosφ, y = R sinφ, z = ξ, φ ∈ [0, π/2], ξ ∈ [0, a].
Normala, kojom je orijentisana spoljna strana cilindra uvek je normalna na
z-osu. Stoga jeD(x, y)
D(φ, ξ)= 0. Takode je∣∣∣∣D(x, z)
D(φ, ξ)
∣∣∣∣ = R sinφ,
∣∣∣∣D(y, z)
D(φ, ξ)
∣∣∣∣ = R cosφ.
Sada je
I1 =
∫∫S+1
yz dx dy + xz dy dzxy dx dz =1
8R2a2π +
1
3aR3.
Povrs S2 lezi u ravni z = 0, te je dz = 0 i∫∫S+2
yz dx dy + xz dy dz +
xy dx dz = 0.Povrs S3 lezi u ravni z = a, a > 0, te je dz = 0 i
∫∫S+3
yz dx dy+xz dy dz+
xy dx dz = a∫∫S+3
y dx dy. Parametarske jednacine povrsi S3 jesu
x = r cosφ, y = r sinφ, z = a, φ ∈ [0, π/2], r ∈ [0, R].
Sada je
∣∣∣∣D(x, y)
D(r, φ)
∣∣∣∣ = r. Normala na S+3 zaklapa ugao 0 sa pozitivnim smerom
z-ose, te je
a
∫∫S+3
y dx dy = a
π/2∫0
sinφdφ
R∫0
r2dr =1
3aR3.
Povrs S4 lezi u ravni x = 0, te je i dx = 0. Prema tome,∫∫S+4
yz dx dy +
xz dy dz + xy dx dz = 0. Analogno,∫∫S+5
yz dx dy + xz dy dz + xy dx dz = 0.
Na kraju, trazeni integral jednak je sumi svih prethodnih integrala: I =2
3aR3 +
1
8a2R2π.

120 GLAVA 4. POVRSINSKI INTEGRALI
4.5 Teorija polja
Skalarno polje je funkcija U(x1, . . . , xn), koja je definisana u nekoj oblastiG, G ⊂ Rn. Skalrano polje je, dakle, preslikavanje U : G → R, gde je Goblast u Rn.
Ako je G ⊂ R3 oblast i P , Q i R funkcije definisane u oblasti G, tadaje a = (P,Q,R) vektorsko polje definisano u oblasti G. Vektorsko polje je,dakle, preslikavanje a : G→ R3, gde je G oblast u R3.
Svakom skalarnom polju U pridruzuje se gradijent, odnosno vektor
grad U = Uxi+ Uyj+ Uzk.
Gradijent skalarnog polja ne zavisi od koordinatnog sistema i pokazuje pravacnajbrzeg rasta skalarnog polja U . Ako je l vektor koji zaklapa redom ugloveα, β, γ sa vektorima i, j,k, tada je izvod diferenijcabilne funkcije U u pravcuvektora l odreden kao
∂U
∂l= Ux cosα+ Uy cosβ + Uz cos γ = l · grad U.
Kako je l jedinicni vektor, onda je ∂U
∂lprojekcija vektora grad U na pravac
vektora l. Ova velicina je utoliko veca ukoliko je ugao koji grad U zaklapasa l manji.
Definicija 4.5.1. Neka je vektorsko polje a definisano u oblasti G ⊂ R3.Ako u oblasti G postoji neprekidno diferencijabilno skalarno polje U takoda vazi
a = grad U,
tada je U potencijal vektorskog polja a. U tom slucaju, ako je a = (P,Q,R),onda vazi
P = Ux, Q = Uy, R = Uz.
Ekvivalentno, U je potencijal vektorskog polja a = (P,Q,R) ako je dU =P dx+Qdy +Rdz.
Definicija 4.5.2. Neka je a = (P,Q,R) neprekidno diferencijabilno vek-torsko polje, definisano u oblasti G. Velicina
div a =∂P
∂x+∂Q
∂y+∂R
∂z
jeste divergencija vektorskog polja a.

4.5. TEORIJA POLJA 121
Simoblicki operator ∇ definisan je kao
∇ =∂
∂xi+
∂
∂yj+
∂
∂zk =
(∂
∂x,∂
∂y,∂
∂z
),
a skraceno se pise
div a = ∇ · a.
Definicija 4.5.3. Ako je a = (P,Q,R) neprekidno diferencijabilno vek-torsko polje, definisano u oblasti G ⊂ R3, onda vektor definisan kao
rot a = ∇× a =
∣∣∣∣∣∣i j k∂∂x
∂∂y
∂∂z
P Q R
∣∣∣∣∣∣jeste rotor vektorskog polja a.
Definicija 4.5.4. Neka je γ deo po deo glatka kriva zatvorena kriva (kon-tura) u oblasti G ⊂ R3 i neka je neprekidno vektorsko polje a = (P,Q,R)definisano u oblasti G. Ako postoji krivolinijski integral∫
γ
P dx+Qdy +Rdz,
onda vrednost tog krivolinijskog integrala jeste cirkulacija vektorskog poljaa duz konture γ.
Ako je dr = ( dx, dy, dz), onda je∫γ
P dx+Qdy +Rdz =
∫γ
a · dr
=
∫γ
(P cosα+Q cosβ +R cos γ) ds
=
∫γ
a · t ds,
gde je t = (cosα, cosβ, cos γ) jedinicni vektor tangente krive γ. Prema tome,vazi ∫
γ
P dx+Qdy +Rdz =
∫γ
|a| cos∠(a, t) ds.
122 GLAVA 4. POVRSINSKI INTEGRALI
Dokazacemo kasnije da je vektorsko polje je potencijalno u oblasti G,ako je cirkulacija tog polja po ma kojoj konturi γ u G jednaka nuli.
Definicija 4.5.5. Neka je vektorsko polje a definisano i neprekidno u oblastiG ⊂ R3 i neka je S deo po deo glatka zatvorena povrs u oblasti G. Neka jen jedinicni vektor normale koji odreduje orijentaciju povrsi S. Integral∫∫
S
a · n dS
naziva se protok ili fluks vektorskog polja a po povrsi S.
Uz oznaku dS = ndS, vazi∫∫S
a · n dS =
∫∫S
a dS =
∫∫S
(P cosα+Q cosβ +R cos γ) dS.
Definicija 4.5.6. Vektorsko polje a je solenoidno u oblasti G ako je protoktog polja po ma kojoj deo po deo glatkoj zatvorenoj povrsi u G jednak nuli.
4.6 Formula Gaus–Ostrogradskog
Neka je G merljiva oblast u R2. Na skupu G neka su definisane deo podeo glatke povrsi: S1 = r1 = r1(u, v) : (u, v) ∈ G i S2 = r2 =r2(u, v) : (u, v) ∈ G. Pretpostavimo da za svako (u, v) ∈ G vazi: r1(u, v) =(x(u, v), y(u, v), z1(u, v)) i r2(u, v) = r2(x(u, v), y(u, v), z2(u.v)) i z1(u, v) ≤z2(u, v). Time je obezbedeno da se povrs S1 i S2 nalaze jedna ispod druge.Na taj nacin je moguce formirati nepravilan ”cilindar“, ’cije su ”baze“ povrsiS1 i S2, a izvodnice su paralelne z-osi. Omotac cilindra je povrs kojuoznacavamo sa S3. Dobijena povrs S = S1 + S2 + S3 je elementarna povrsu odnosu na z-osu, a ”cilindar“ je elementarna oblast u odnosu na z-osu.Povrs S neka je orijentisana spolja (u odnosu na cilindar). Analogno semogu razmatrati povrsi elementarne u odnosu na bilo koju osu.
Teorema 4.6.1. (Gaus–Ostrogradski) Neka su funkcije P , Q i R definisanei neprekidne zajedno sa parcijalnim izvodima ∂P
∂z ,∂Q∂y i ∂R
∂z u zatvorenju G
oblasti G ⊂ R3. Pretpostavimo da se oblast G moze prikazati kao unijaelementarnih oblasti u odnosu na sve tri ose. Neka je S+ rub oblasti G

4.6. FORMULA GAUS–OSTROGRADSKOG 123
orijentisan spolja u odnosu na G. Tada vazi formula∫∫∫G
(∂P
∂x+∂Q
∂y+∂R
∂z
)dx dy dz =
∫∫S+
P dy dz +Qdz dx+Rdxdy
=
∫∫S
(P cosα+Q cosβ +R cos γ)dS.
Drugim recima, ako je a = (P,Q,R) vektorsko polje, tada vazi∫∫∫G
div a dx dy dz =
∫∫S
a dS.
Prema tome, trojni integral divergencije vektorskog polja a u merljivoj oblastiG jednak je protoku tog polja kroz rub oblasti G (koja je deo po deo glatkapovrs).
Dokaz. Teoremu dokazujemo u slucaju kada je G elementarna oblast uodnosu na sve tri ose. Neka je skup G elementaran u odnosu na z-osu.Tada postoje povrsi S1 i S2, tako da je S1 ”ispod“ S2. Omotac cilindraje povrs S3. Neka je D projekcija povrsi S1 (i S2) na Oxy ravan. Postojeneprekidno diferencijabilne funkcije φ1(x, y) i φ2(x, y) na skupu D, tako daje Si = (x, y, φi(x, y)) : (x, y) ∈ D, i = 1, 2, pri cemu je φ1(x, y) < φ2(x, y)za svako (x, y) ∈ D. Svaka normala na povrs S3 je normala na z osu i stogaje ∫∫
S+3
R dx dy = 0.
Sada vazi∫∫∫G
∂R
∂zdx dy dz =
∫∫D
dx dy
φ2(x,y)∫φ1(x,y)
∂R
∂zdz
=
∫∫D
R(x, y, φ2(x, y)) dx dy −∫∫D
R(x, y, φ1(x, y)) dx dy
=
∫∫S+2
Rdxdy +
∫∫S+1
Rdxdy +
∫∫S+3
Rdxdy,
odnosno ∫∫∫G
∂R
∂zdx dy dz =
∫∫S+
Rdxdy.

124 GLAVA 4. POVRSINSKI INTEGRALI
Koristeci elementarnost u odnosu na preostale dve ose, lako se pokazuje davazi ∫∫∫
G
∂Q
∂ydx dy dz =
∫∫S+
Qdz dx
i ∫∫∫G
∂P
∂xdx dy dz =
∫∫S+
P dx dy.
Sabiranjem ovih jednakosti dobija se trazena formula.Ako je oblast G unija konacno mnogo oblasti elementarnih u odnosu na
sve tri koordinatne ose, onda treba primeniti upravo pokazanu formulu nasve elementarne oblasti, a na kraju sabrati dobijene integrale.
Formula Gausa–Ostrogradskog moze biti dokazana i za oblasti opstijeod unije elementarnih oblasti. Teoremu navodimo bez dokaza.
Teorema 4.6.2. (Gaus–Ostrogradski) Neka je vektorsko polje a = (P,Q,R)neprekidno zajedno sa izvodima ∂P
∂x ,∂Q∂y ,
∂R∂z u zatvorenju G neke oblasti G ⊂
R3. Neka je rub oblasti G spolja orijentisana deo po deo glatka zatvorenapovrs S. Tada vazi formula∫∫∫
div a dx dy dz =
∫∫S
adS.
Primer 4.6.1. Izracunati integral I =∫∫S+
−x2z dy dz+y dz dx+2 dx dy, ako
je S+ spolja orijentisan omotac skupa G, G je deo elipsoida 4x2+y2+4z2 = 4u prvom oktantu.
Resenje. Prema formuli Gaus–Ostrogradskog, vazi
I =
∫∫∫G
(−2xz + 1) dx dy dz.
Deo elipsoida je dat sa: x2 +(y2
)2+ z2 = 22, x, y, z ≥ 0. Uvodimo uopstenu
sfernu smenu:
x = r cosφ sinψ, y = 2r sinφ sinψ, z = r cosψ,
φ ∈ (0, π/2), ψ ∈ (0, π/2), r ∈ (0, 1), |J | = 2r2 sinψ.
Trazeni integral jednak je
I = 2
π/2∫0
dφ
π/2∫0
dψ
1∫0
(−2r2 cosφ sinψ cosψ + 1)r2 sinψdr =π
3− 4
15.
4.6. FORMULA GAUS–OSTROGRADSKOG 125
Primer 4.6.2. Izracunati integral∫∫S+
(y − z) dy dz + (z − x) dx dz + (x −
y) dx dy, gde je S+ spoljna strana konusa x2 + y2 = z2, 0 ≤ z ≤ h.
Resenje. Dati konus nije rub ni jednog skupa u R3. Stoga, zatvorimo ovajkonus delom ravni z = h, koja je unutar konusa. Deo ravni oznacimo sa S1,a dobijeni skup u R3 (kupu) oznacimo sa G. Tada je S2 = S+S1 rub skupaG. Prema formuli Gaus–Ostrogradskog, vazi∫∫
S+2
(y − z) dy dz + (z − x) dx dz + (x− y) dx dy =
=
∫∫∫G
(Px +Qy +Rz) dx dy dz = 0.
Prema tome,
I =
∫∫S+
(y − z) dy dz + (z − x) dx dz + (x− y) dx dy
= −∫∫S+1
(y − z) dy dz + (z − x) dx dz + (x− y) dx dy.
Poslednji integral se izracunava po definiciji. Na povrsi S1 je z = h, odaklesledi dz = 0 i
I = −∫S+1
(x− y) dx dy.
Parametarske jednacine povrsi S1 su
x = r cosφ, y = r sinφ, z = h, r ∈ (0, h), φ ∈ (0, 2π).
Sledi ∣∣∣∣D(x, y)
D(r, φ)
∣∣∣∣ = r
i
I = −2π∫0
dφ
h∫0
r2(cosφ− sinφ)dr = 0.

126 GLAVA 4. POVRSINSKI INTEGRALI
Merljiva oblast G ⊂ R3 je dopustiva, ako se u njoj moze primeniti for-mula Gaus-Ostrogradskog za proizvoljno neprekidno diferencijabilno vek-torsko polje na skupu G. Neka je G dopustiva oblast u R3 i rub oblastiG je S = rG je deo po deo glatka povrs. Posmatra se vektorsko poljea = (x, y, z) na skupu G. Na osnovu formule Gausa–Ostrogradskog slediformula za izracunavanje zapremine oblasti G:
m(G) =1
3
∫∫S
x dy dz + y dz dx+ z dx dy. (4.4)
Neka su f i g ogranicene i integrabilne funkcije na merljivom skupu G,tako da je A ≤ f(x) ≤ B i g(x) ≥ 0 za svako x ∈ G. Tada ocigledno vazenejednakosti:
A
∫G
gdx ≤∫G
fgdx ≤ B
∫G
gdx.
Postoji neki broj C ∈ [A,B] tako da vazi∫G
fgdx = C
∫G
g dx.
U slucaju kada je f neprekidna funkcija na prosto povezanom kompaktu G,tada f dostize svoj minimum i maksimu na G. Postoje tacke x1, x2 ∈ G,tako da je
A = minx∈G
f(x) = f(x1), B = maxx∈G
f(x) = f(x2).
Obzirom da je G prosto povezan, sledi da postoji kontura γ: x = x(t),t ∈ [a, b], tako da je x(a) = A, x(b) = B i γ ⊂ G. Iz neprekidnosti realnefunkcije t 7→ f(x(t)) na segmentu [a, b] i A ≤ C ≤ B, sledi da postoji tackat0 ∈ [a, b], tako da je f(x(t0)) = C. Ako je x(t0) = ξ0, onda vazi∫
G
fgdx = f(ξ0)
∫G
gdx. (4.5)
Poslednji rezultat se naziva teorema o srednjoj vrednosti za visestruke inte-grale.
Neka je sada G dopustiva oblast u R3 i a neprekidno diferencijabilnovektorsko polje u G. Neka je M0 ∈ G. Tada postoji kugla sa centrom uM0 poluprecnika d, koja je sadrzana u skupu G. Rub kugle Kd je spolja

4.6. FORMULA GAUS–OSTROGRADSKOG 127
orijentisana sfera Sd. Prema teoremi o srednjoj vrednosti za integrale, sledida postoji neka tacka M ∈ Kd tako da vazi
div a(M) =
∫∫Sd
a · dS
m(Kd).
Ako d→ 0, zbog neprekidnosti funkcije polja a sledi
div a(M0) = limd→0
∫∫Sd
a · dS
m(Kd). (4.6)
U prethodnoj formuli se umesto kugle Kd moze uzeti bilo koja dopustivaoblast D, sa svojstvom M0 ∈ D ⊂ G i dijametar oblasti D tezi nuli:
div a(M0) = limdiam(D)→0
∫∫rD
a · dS
m(D). (4.7)
Na ovaj nacin se pokazuje da je pojam divergencije vektorskog polja moguceuvesti pomocu granicnih vrednosti oblika (4.7).
Oblast G je zapreminski prosto povezana, ako za svaku deo po deo glatkupovrs S bez ruba, koja je sadrzana uG, sledi da je i oblastD, koju ogranicavapovrs S, sadrzana u G, odnsono D ⊂ G. Na primer, oblast koja se nalaziizmedu dve koncentricne sfere nije zapreminski jednostruko povezana.
Teorema 4.6.3. Neka je vektorsko polje a neprekidno diferencijabilno uzapreminski jednostruko povezanoj oblasti G. Polje a je solenoidno, ako isamo ako div a(M) = 0 za svako M ∈ G.
Dokaz. Neka je polje a solenoidno, odnosno protok vektorskog polja a poma kojoj deo po deo glatkoj zatvorenoj povrsi S (S ⊂ G) jeste nula. Nekaje M0 ∈ G proizvoljna tacka, neka je Kd kugla sa centrom u M0 i Kd ⊂ G.Prema fomruli (4.6) sledi da je div(M0) = 0. U ovom delu se ne pretpostavljazapreminksa povezanost oglasti G.
Neka je divM = 0 za svako M ∈ G. Neka je S proizvoljna deo po deoglatka zatvorena povrs u G. Tada povrs S ogranicava oblast D. Oblastje G zapreminski jednostruko povezana, te je D ⊂ G. Primenom formuleGaus–Ostrogradskog na oblast D i povrs S sledi da je protok polja a krozpovrs S jendak nuli. Prema tome, polje a je solenoidno.

128 GLAVA 4. POVRSINSKI INTEGRALI
4.7 Formula Stoksa
Neka je D merljiva oblast u R2 promenljivih u i v. Rub oblasti D jepozitivno orijentisana (u odnosu na D) kontura γ: u = u(t), v = v(t),t ∈ [a, b]. Na skupu D definisana je neprekidno diferencijabilna (ili deo podeo glatka) povrs S = r = r(u, v) : (u, v) ∈ D. Rub povrsi S je konturaΓ: x = x(u(t), v(t)), y = y(u(t), v(t)), t ∈ [a, b], koja je orijentisana sa-glasno orijentaciji krive γ. Povrs S je orijentisana saglasno orijentaciji kriveγ, odnosno jedinicni vektor normale povrsi je n = ru×rv
|ru×rv | . Vektorsko polje
a = (P,Q,R) neka je neprekidno diferencijabilno na povrsi S.
Teorema 4.7.1. (Stoks) Pod prethodno navednim uslovima, vazi formula∫Γ+
a · dr =
∫∫S
rot a dS,
odnosno cirkulacija vektorskog polja a duz konture Γ jednaka je protoku togpolja kroz ma koju do po deo glatku povrs S, ciji je rub kriva γ, a povrs jeorijentisana saglasno orijentaciji krive Γ.
Drugim recima, vazi
∫Γ+
P dx+Qdy +Rdz =
∫∫S
∣∣∣∣∣∣cosα cosβ cos γ∂∂x
∂∂y
∂∂z
P Q R
∣∣∣∣∣∣ dS,gde su α, β, γ uglovi koje vektor normale n zaklapa sa pozitivnim delovimax, y i z koordinatnih osa.
Dokaz. Podsecamo da je γ pozitivno orijentisana kontura koja ogranicavaoblast D. Tada da vazi∫
Γ+
P dx =
=
b∫a
P [x(u(t), v(t)), y(u(t), v(t)), z(u(t), v(t))]x′t(u(t), v(t))dt
=
b∫a
P · (xuut + xvvt) dt
=
∫γ+
P · (xudu+ xvdv).

4.7. FORMULA STOKSA 129
Primenom Grinove formule na poslednji izraz, sledi∫γ+
P dx =
∫D
[∂
∂u
(P∂x
∂v
)− ∂
∂v
(P∂x
∂u
)]dudv
=
∫D
[(Pxxu + Pyyu + Pzzu)xv
+Pxuv − (Pxxv + Pyyv + Pzzv)xu − Pxvu] dudv
=
∫∫D
[PzD(z, x)
D(u, v)− Py
D(x, y)
D(u, v)
]dudv
=
∫∫S+
Pz dz dx−∫∫S+
Py dx dy
=
∫∫S
(Pz cosβ − Py cos γ) dS.
Analogno se dokazuju formule∫Γ+
Qdy =
∫∫S
(Qx cos γ −Qz cosα) dS
∫γ+
Rdz =
∫∫S
(Ry cosα−Rx cosβ) dS.
Sabiranjem polsednje tri jednakosti dobija se trazeni rezultat.
Primer 4.7.1. Data je sfera x2 + y2 + z2 = 1 i paraboloid z = x2 + y2.Presek sfere i paraboloida je kontura γ. Dato je vektorsko polje a = (y, x2, z).Proveriti formulu Stoksa.
Resenje. Uvodimo cinlindricne koordinate:
x = r cosφ, y = r sinφ, z = ξ, r > 0, φ ∈ (0, 2π), ξ ∈ R.
Zbog uslova z ≥ 0 sledi ξ ≥ 0. U novim kordinatama jednacina sfere jer2 + ξ2 = 1, a jednacina elipsoida je r2 = ξ.
Kontura γ je presek sfere i paraboloida, odakle sledi da se ξ za konturuγ dobija kao poziitvno resenje jednacine ξ2 + ξ − 1 = 0. Prema tome,
ξ =
√5− 1
2. Parametarske jednacine konture γ su
x =
√√5− 1
2cosφ, y =
√√5− 1
2sinφ, z =
√5− 1
2, φ ∈ [0, 2π].

130 GLAVA 4. POVRSINSKI INTEGRALI
Sledi da je γ kruzica u ravni z =
√5− 1
2, pozitivno orijentisana posmatrana
odozgo. Stoga je
I1 =
∫γ+
y dx+ x2 dy + z dz
=
√5− 1
2
2π∫0
(− sin2 φ)dφ+
(√5− 1
2
)3/2 2π∫0
cos3 φdφ
= −π√5− 1
2.
Neka je S1 deo paraboloida koji je unutar sfere. Orijentisana je gornjastrana paraboloida, kako bi bila u skladu sa orijentacijojm konture γ. Sadaje ∣∣∣∣∣∣
cosα cosβ cos γ∂∂x
∂∂y
∂∂z
y x2 z
∣∣∣∣∣∣ = (2x− 1) cos γ.
Parametarske jednacine povrsi S1 jesu
x = r cosφ, y = r sinφ, z = r2, φ ∈ [0, 2π], r ∈
0,√√
5− 1
2
.Prema tome,
I2 =
∫∫S1
∣∣∣∣∣∣cosα cosβ cos γ∂∂x
∂∂y
∂∂z
y x2 z
∣∣∣∣∣∣ dS =
∫∫S1
(2x− 1) cos γ dS.
Vazi
cos γ =
∣∣∣∣D(x, y)
D(r, φ)
∣∣∣∣ = r.
Sada je
I2 =
2π∫0
dφ
√√5−12∫
0
r(2r cosφ− 1)dr = −π√5− 1
2.
Neka je S3 deo sfere unutar paraboloida. Orijentisana je gornja stranasfere, kako bi bila u skladu sa orijentacijom krive γ+. Parametarske jednacinepovrsi S2 jesu:
x = cosφ sinψ, y = sinφ sinψ, z = cosψ, φ ∈ [0, 2π], ψ ∈ [0, ψ0],

4.7. FORMULA STOKSA 131
gde je ψ0 ∈ [0, π/2] takav broj sa svojstvom sin2 ψ0 = cosψ0. Broj ψ0 sedobija iz uslova preseka sfere i paraboloida. Sada je
cos γ =
∣∣∣∣D(x, y)
D(φ,ψ)
∣∣∣∣ = sinψ cosψ.
Vazi
I3 =
∫∫S3
∣∣∣∣∣∣cosα cosβ cos γ∂∂x
∂∂y
∂∂z
y x2 z
∣∣∣∣∣∣ dS=
∫∫S3
(2x− 1) cos γdS
=
2π∫0
dφ
ψ0∫0
(2 cosφ sinψ − 1) sinψ cosψ dψ
= −π sin2 ψ0 = −π cosψ0.
Uslov sin2 ψ0 = cosψ0 je ispunjen ako i samo ako vazi cos2 ψ0+cosψ0−1 = 0,
odnosno ako i samo ako je cosψ0 =
√5− 1
2. Na kraju,
I3 = −π√5− 1
2.
Vazi I1 = I2 = I3, cime je pokazano da vazi formula Stoksa.
Primer 4.7.2. Izracunati integral I =∫γ(y− z) dx+(z−x) dy+(x− y) dz,
ako je γ presek cilindra x2 + y2 = 1 i ravni x+ z = 1, orijentisana pozitivnoposmatrano sa pozitivnog dela x-ose.
Resenje. Uvodenjem cilindricnih koordinata, lako se proverava da je jednacinakrive, sa trazenom orijentacijom, data kao
x = r cosφ, y = r sinφ, z = 1− r cosφ, φ ∈ (0, 2π), r ∈ (0, 1).
Vazi ∣∣∣∣∣∣cosα cosβ cos γ∂∂x
∂∂y
∂∂z
y − z z − x x− y
∣∣∣∣∣∣ = −2(cosα+ cosβ + cos γ).
Pri tome jecosα = cos γ = r, cosβ = 0.
132 GLAVA 4. POVRSINSKI INTEGRALI
Prema Stoksovoj formuli, vazi
I = (−2)
∫S
(cosα+ cosβ + cos γ)dS = −2
2π∫0
dφ
1∫0
2rdr = −4π.
Neka je u oblasti G ⊂ R3 definisano neprekidno diferencijabilno vek-torsko polje a, neka je M0 ∈ G i neka je n jedinicni vektor. Ravan π nekasadrzi M0 i normalna je na n. U ravni π neka je S merljiva oblast kojasadrzi M0, S ⊂ G, tako da je rub oblasti S u ravni π kontura γ. Pret-postavimo da je γ orijentisana pozitivno u odnosu na onu stranu oblasti Skoja je orijentisana vektorom n. Na osnovu Stoksove formule vazi∫
γ+
a · dr =
∫∫S
(rot a · n)dS.
Primenom formule o srednjoj vrednosti integrala, sledi da vazi∫∫S
(rot a · n)dS = (rot a · n)(M) ·m(S),
gde je S ∈M i m(S) je povrsina oblasti S. Prelaskom na granicnu vrednostkada dijametar oblasti S tezi nuli i koristeci neprekidnost funkcije rot a · n,sledi formula
rotn a(M0) = limdiam(S)→0
∫γ+
a · dr
m(S). (4.8)
Ovde je rot a · n = rotn a projekcija rotora vektorskog polja a na jedinicnivektor n. Prethodna formula omogucava definiciju rotora vektorskog poljapreko granicne vrednosti oblika (4.8).
Povrs S je dopustiva, ako je rub povrsi S neka kontura, tako da se zaproizvoljno neprekidno diferencijabilno vektorsko polje na povrsi S moze pri-meniti Stoksova formula. OblastG ⊂ R3 je povrsinski jednostruko povezana,ako za svaku konturu γ ⊂ G postoji dopustiva povrs S tako da je S ⊂ G irS = γ. Na primer, torus nije jednostruko povrsinski povezana oblast. Mozese pokazati da je svaka konveksna oblast povrsinski jednostruko povezana.
Teorema 4.7.2. Neka je vektorsko polje a neprekidno diferencijabilno upovrsinski jednostruko povezanoj oblasti G ⊂ R3. Tada su sledeca tvrdenjaekvivalentna:

4.7. FORMULA STOKSA 133
(1)∫γ+
a · dr = 0 za svaku konturu γ sadrzanu u G.
(2) Polje a je potencijalno, odnosno postoji potencijal U(x, y, z) polja a.U tom slucaju je ∫
(AB)
adr = U(B)− U(A),
gde je (AB) bilo koja kriva u G koja spaja A i B.(3) rotν a(M) = 0 za svaku tacku M ∈ G, odnosno polje a je bezvrtlozno.
Dokaz. Ekvivalencija tvrdenja (1) i (2) dokazuje se na potpuno isti nacinkao u dvodimenzionalnom slucaju. Implikacija (1) =⇒ (3) sledi na osnovuformule (4.8). Implikacija (3) =⇒ (1) sledi na osnovu Stoksove formule.

134 GLAVA 4. POVRSINSKI INTEGRALI
Glava 5
Parametarski integrali
5.1 Funkcija gornje granice
Neka je data funkcija f : [a, b] → R. Definisemo funkciju gornje graniceintegrala na sledeci nacin:
F (x) =
x∫a
f(t)dt,
za one vrednosti x ∈ [a, b] za koje postoji prethodni integral. Dokazujemovazan rezultat o neprekidnosti i diferencijabilnosti funkcije F .
Teorema 5.1.1. (1) Ako je funkcija f integrabilna na [a, b], onda je funkcijaF neprekidna na [a, b].
(2) Ako je funkcija f neprekidna na [a, b], onda je funkcija F diferenci-jabilna na [a, b] i F ′(x) = f(x) za svako x ∈ [a, b].
Dokaz. (1) Pretpostavimo da je f integrabilna na [a, b]. Tada je funkcijaf ogranicena na [a, b], te postoji M > 0, tako da za svako t ∈ [a, b] vazi|f(t)| ≤M . Neka je x ∈ [a, b], i neka je ∆x realan broj, tako da je x+∆x ∈[a, b]. Tada je
|F (x+∆x)− F (x)| =
∣∣∣∣∣∣x+∆x∫a
f(t)dt−x∫a
f(t)dt
∣∣∣∣∣∣ =∣∣∣∣∣∣x+∆x∫x
f(t)dt
∣∣∣∣∣∣≤
∣∣∣∣∣∣x+∆x∫x
|f(t)|dt
∣∣∣∣∣∣ ≤M
∣∣∣∣∣∣x+∆x∫x
dt
∣∣∣∣∣∣ =M · |∆x| .
135

136 GLAVA 5. PARAMETARSKI INTEGRALI
Sledi lim∆x→0
f(x + ∆x) = f(x), te je funkcija f neprekidna u tacki x. Kako
je x ∈ [a, b] proizvoljna tacka, proizilazi da je f neprekidna na [a, b].(2) Pretpostavimo da je f neprekidna, samim tim i integrabilna na [a, b].
Neka je x ∈ [a, b], i neka je ∆x realan broj tako da je x+∆x ∈ [a, b]. Neka jeϵ > 0 proizvoljan broj. Na osnovu neprekidnosti funkcije f u tacki x, sledida postoji δ > 0, tako da ako je |t− x| < δ, odna je |f(t)− f(x)| < ϵ. Nekaje, dakle, |∆x| < δ. Tada je
∣∣∣∣F (x+∆x)− F (x)
∆x− f(x)
∣∣∣∣ =∣∣∣∣∣∣ 1
∆x
x+∆x∫x
f(t)dt− 1
∆x
x+∆x∫x
f(x)dt
∣∣∣∣∣∣≤ 1
|∆x|
∣∣∣∣∣∣x+∆x∫x
|f(t)− f(x)|dt
∣∣∣∣∣∣ ≤ ϵ.
Proizilazi da je funkcija F diferencijabilna u tacki x, kao i F ′(x) = f(x).
5.2 Svojstveni parametarski integrali
Neka je X ⊂ Rn, i neka je Y ⊂ Rm. Funkcija f : X × Y → R je funkcijadve promenljive, i to x ∈ X i y ∈ Y . Pretpostavimo da je X merljiv skupu Rn, i pretpostavimo da za svako y ∈ Y postoji integral
∫X
f(x,y)dx. Pri
tome, izraz dx u prethodnon integralu oznacava da se integrali u domenupromenljive x = (x1, . . . , xn), odnosno dx ≡ dx1 · · · dxn. Tada prethodniintegral jeste funkcija promenljive y, odnosno
I(y) =
∫X
f(x,y)dx (5.1)
je svojstveni parametarski integral, pri cemu je, naravno, y ∈ Y parametar.U mnogim primenama parametarskih integrala, od interesa je pronaci
nacin za izracunavanje granicne vrednost, izvoda ili integrala nekog para-metarskog integrala. Preciznije, potrebno je utvrditi pod kojim uslovima in-tegral moze zameniti mesto sa granicnom vrednoscu, izvodom ili integralomfunkcije.
Prvo razmatramo granicnu vrednost funkcije F definisane formulom (5.1).Neka je y0 je tacka nagomilavanja skupa Y . Funkcija (x,y) 7→ f(x,y) jedefinisana na skupu X×Y , a funkcija x 7→ φ(x) neka je definisana na skupuX.

5.2. SVOJSTVENI PARAMETARSKI INTEGRALI 137
Funkcija f(x,y) ravnomerno konvergira ka funkciji φ(x) na skupu X (ilipo x ∈ X) kada y → y0, ako:
(∀ϵ > 0)(∃δ > 0)(∀x ∈ X)(∀y ∈ Y )(∥y− y0∥ < δ =⇒ |f(x,y)− φ(x)| < ϵ.
Oznaka je f(x,y)x∈X⇒ φ(x), y → y0.
Ako je f(x,y)x∈X⇒ φ(x), y → y0, onda je lim
y→y0
f(x,y) = φ(x) za svako
x ∈ X. Obrnuta implikacija ne vazi u opstem slucaju.
Teorema 5.2.1. Neka je X ⊂ Rn merljiv skup, Y ⊂ Rm, i neka je funkcijaf : X ×Y takva, da za svako y ∈ Y postoji integral
∫X
f(x,y)dx. Neka je y0
tacka nagomilavanja skupa Y . Ako funkcija f(x,y) ravnomerno konvergiraka funkciji φ(x) po x ∈ X kada y → y0, tada je φ(x) integrabilna funkcijana skupu X i vazi
limy→y0
∫X
f(x,y)dx =
∫X
limy→y0
f(x,y)dx =
∫X
φ(x)dx.
Dokaz. Skup X je merljiv, te je mn(X) < ∞. Neka je ϵ > 0. Na osnovu
f(x,y)x∈X⇒ φ(x) kada y → y0, sledi da postoji δ > 0, tako da za svako
x ∈ X i svako y ∈ Y vazi implikacija:
∥y − y0∥ < δ =⇒ |f(x,y)− φ(x)| < ϵ
3 ·mn(X).
Neka je stoga y ∈ Y i ∥y − y0∥ < δ.
Postoji integral∫X
f(x,y)dx. Stoga postoji podela T = Gjkj=1 skupa
X, tako da se gornja i donja Darbuova suma funkcije f (u odnosu na podeluT , kao i u odnosu na odabranu tacku y) razlikuju za manje od ϵ
3 . Neka je(za vec odabrano y ∈ Y ) i svako j ∈ 1, . . . , k:
mφj = inf
x∈Xφ(x), Mφ
j = supx∈X
φ(x), mfj = inf
x∈Xf(x,y), Mf
j = supx∈X
f(x,y).
U skladu sa uvedenim oznakama, vazik∑j=1
(Mfj −mf
j )mn(Gj) <ϵ3 .

138 GLAVA 5. PARAMETARSKI INTEGRALI
Procenjujemo razliku gornje i donje Darbuove sume funkcije φ u odnosuna podelu T :∣∣∣∣∣∣
k∑j=1
(Mφj −mφ
j )mn(Gj)
∣∣∣∣∣∣ ≤k∑j=1
|Mφj −Mf
j |mn(Gj) +
k∑j=1
(Mfj −mf
j )mn(Gj)
+k∑j=1
|mfj −mφ
j |mn(Gj)
≤ ϵ
3 ·mn(X)
k∑j=1
mn(Gj) +ϵ
3+
ϵ
3 ·mn(X)
k∑j=1
mn(Gj) = ϵ.
Na taj nacin je dokazana integrabilnost funkcije φ na skupu X.Jos jednom, neka je y ∈ Y i ∥y − y0∥ < δ. Tada vazi procena∣∣∣∣∣∣
∫X
f(x,y)dx−∫X
φ(x)dx
∣∣∣∣∣∣ ≤∫X
|f(x,y)− φ(x)| dx ≤ ϵ
3.
Time je dokazano tvrdenje teoreme.U nekim situacijama korisno je primeniti Teoremu Dinija1 za utvrdivanje
ravnomerne konvergencije niza funkcija.
Teorema 5.2.2. (Dini) Neka je K kompaktan skup u Rm, neka je (fn)n nizrealnih neprekidnih funkcija koje su definisane na K, i neka je f : K → Rtakode realna neprekidna funkcija na K. Pretpostavimo da vaze sledeca dvauslova:
(1) fn(x) ≤ fn+1(x) za svako x ∈ K i svako n ∈ N;(2) lim
n→∞fn(x) = f(x) za svako x ∈ K.
Tada je fnx∈K⇒ f kada n→ ∞.
Dokaz. Neka je ϵ > 0, i za svako n ∈ N neka je gn = f − fn. Funkcije fn i fsu neprekidne, te su i funkcije gn neprekidne. Skup E = (−epsilon,+ϵ) jeotvoren u R, pa je skup Fn = g−1
n (E) = x ∈ K : f(x)− fn(x) < ϵ otvorenu Rm . Niz (fn)n je rastuci, te je niz (gn)n opadajuci. Prema tome, morabiti Fn ⊂ Fn+1. Na osnovu lim
n→∞fn(x) = f(x) za svako x ∈ K, sledi da je
K ⊂∞∪n=1
Fn. Skup K je kompaktan, pa proizilazi da prethodno otvoreno
pokrivanje skupa K moze biti svedeno na konacno pokrivanje. Dakle, K ⊂1Ulisse Dini (1845-1918), italijanski matematicar

5.2. SVOJSTVENI PARAMETARSKI INTEGRALI 139
F1 ∪ · · · ∪ Fl = Fl. Neka je sada n ≥ l i x ∈ K. Tada je x ∈ Fl i
f(x)− fn(x) < ϵ. Time je dokazano fnx∈K⇒ f .
Teorema Dinija moze biti dokazana analogno u slucaju opadajuceg nizafunkcija.
Dokazujemo rezultat o neprekidnosti funkcije F .
Teorema 5.2.3. Neka je X ⊂ Rn kompaktan i merljiv, i neka je Y ⊂ Rmkompaktan skup. Ako je funkcija (x,y) 7→ f(x,y) neprekidna na X × Y ,tada funkcija F postoji i ona je ravnomerno neprekidna na Y .
Dokaz. Za svako y ∈ Y funkcija x 7→ f(x,y) je neprekidna na kompak-tnom i merljivom skupu X, te je ova funkcija integrabilna na X. Stogapostoji funkcija F . Prema pretpostavkama teoreme, skup X × Y morabiti kompaktan. Funkcija f je neprekidna na kompaktu X × Y , te jefunkcija f ravnomerno neprekidna na ovom skupu. Skup X je merljiv, te jemn(X) < ∞. Neka je ϵ > 0. Postoji δ > 0, tako da za svako x ∈ X i svakoy1,y2 ∈ Y vazi implikacija:
d(x,y1)− d(x,y2) < δ =⇒ |f(x,y1)− f(x,y2)| <ϵ
mn(X).
Imajuci u vidu osobine Eukolidove metrike u Rn+m, prethodna implikacijaje ekvivalentna sledecoj:
∥y1 − y2∥ < δ =⇒ |f(x,y1)− f(x,y2)| < ϵ.
Neka je stoga ∥y1 − y2∥ < δ. Tada je
|F (y1)− F (y2)| =
∣∣∣∣∣∣∫X
f(x,y1)− f(x,y2)dx
∣∣∣∣∣∣ ≤∫X
|f(x,y1)− f(x,y2)|dx
≤ ϵ
mn(X).
Time je dokazana ravnomerna neprekidnost funkcije F na skupu Y .Jednostavno je dokazati rezultat za integraljenje svojstvenog parametar-
skog integrala.
Teorema 5.2.4. Ako je funkcija f(x,y) neprekidna na skupu K = X × Y ,gde su X ⊂ Rn i Y ⊂ Rm merljivi i kompaktni skupovi, onda je∫
Y
dy
∫X
f(x,y)dx =
∫X
dx
∫Y
f(x,y)dy.

140 GLAVA 5. PARAMETARSKI INTEGRALI
Dokaz. Pod uslovima teoreme, skup K je merljiv i kompaktan u Rn+m.Prema Fubinijevoj teoremi, oba posmatrana integrala su jednaka integralu∫∫K
f(x,y)dxdy.
Na kraju, ispitujemo uslove diferencijabilnosti svojstvenog parametarskogintegrala.
Teorema 5.2.5. Neka je X merljiv kompakt u Rn, neka je Y = [c, d] ⊂ R,i neka je data neprekidna funkcija f : X × Y → R, tako da je parcijalniizvod ∂f(x,y)
∂y neprekidan na skupu K = X × Y . Tada je funkcija F (y) =∫X
f(x, y)dx neprekidno diferencijabilna po y ∈ [c, d], i pri tome je
F ′(y) =d
dy
∫X
f(x, y)dx =
∫X
∂f(x, y)
∂ydx, y ∈ [c, d].
Dokaz. Neka je y ∈ [c, d] proizvoljna tacka. Primenimo prethodnu teoremuna funkciju ∂f
∂y na merljivom kompaktu K1 = X × [c, y]. Sada vazi
y∫c
dη
∫X
∂f(x, η)
∂ydx =
∫X
dx
y∫c
∂f(x, η)
∂ydη (5.2)
=
∫X
f(x, y)dx− C1, (5.3)
gde je C1 =∫X
f(x, c)dx. Skup K je kompaktan, a funkcija ∂f∂y je neprekidna
na K. Stoga je ∂f∂y ravnomerno neprekidna na K. Prema tome, funkcija
φ(η) =
∫X
∂f(x, η)
∂ydx
je (ravnomerno) neprekidna po η ∈ [c, d]. Sledi
d
dy
y∫c
φ(η)dη = φ(y) =
∫X
∂f(x, η)
∂ydx.
Sada formula (5.3) postaje
y∫c
φ(η)dη + C1 =
∫X
f(x, y)dx.

5.2. SVOJSTVENI PARAMETARSKI INTEGRALI 141
Na kraju, vazi
d
dy
∫X
f(x, y)dx =d
dy
y∫c
φ(η)dη = φ(y) =
∫X
∂f(x, η)
∂ydx.
Sledeci rezultat je posebno interesantan za primene.
Teorema 5.2.6. Neka su f(x, y) i ∂f(x,y)∂y neprekidne funkcije na skupu
[a, b]× [c, d]. Neka su α(y) i β(y) diferencijabine funkcije na [c, d]. Tada jefunkcija
F (y) =
β(y)∫α(y)
f(x, y)dx
diferencijabilna na [c, d] i pri tome vazi formula
F ′(y) =
β(y)∫α(y)
∂f(x, y)
∂ydx+ β′(y)f(β(y), y)− α′(y)f(α(y), y).
Specijalno, ako su α i β neprekidno diferencijabilne, onda je i F neprekidnodiferencijabilna.
Dokaz. Neka je y, y +∆y ∈ [c, d]. Tada je
F (y +∆y)− F (y)
∆y=
1
∆y
β(y+∆y)∫α(y+∆y)
f(x, y +∆y)dx−β(y)∫α(y
f(x, y)dx
=
β(y)∫α(y)
f(x, y +∆y)− f(x, y)
∆ydx+
1
∆y
β(y+∆y)∫β(y)
f(x, y +∆y)dx
− 1
∆y
α(y+∆y)∫α(y)
f(x, y +∆y)dx.
Funkcije f i ∂f∂y su neprekidne, te na osnovu Lagranzove teoreme o sred-njoj vrednosti sledi da postoji tacka ξ1 izmedu y i y +∆y, tako da je
f(x, y +∆y)− f(x, y)
∆y=∂f(x, ξ1)
∂y.
142 GLAVA 5. PARAMETARSKI INTEGRALI
Funkcija ∂f(x,y)∂y je neprekidna, pa je onda
lim∆y→0
β(y)∫α(y)
f(x, y +∆y)− f(x, y)
∆ydx =
∫ β(y)
α(y)
∂f(x, y)
∂ydx.
Funkcija f je neprekidna, pa na osnovu Teoreme o srednjoj vrednosti zaintegrale, postoji ξ2 izmedu β(y) i β(y +∆y), tako da vazi
1
∆y
β(y+∆y)∫β(y)
f(x, y +∆y)dx = f(ξ2, y)β(y +∆y)− β(y)
∆y.
Funkcija β je neprekidna, te ξ2 → β(y) kada ∆y → 0. Funkcija f jeneprekidna, a funkcija β je diferencijabilna, i stoga je
lim∆y→0
1
∆y
β(y+∆y)∫β(y)
f(x, y +∆y)dx = β′(y)f(β(y), y)).
Analogno,
lim∆y→0
1
∆y
α(y+∆y)∫α(y)
f(x, y +∆y)dx = α′(y)f(α(y), y)).
Time je teorema dokazana.
5.3 Nesvojstveni parametarski integrali
Prametarski integral je nesvojstven, ako je domen integracije neogranicenskup, ili je funkcija neogranicena u okolini neke tacke domena integracije.Jednostavnosti radi, pretpostavljamo da su promenljive x i y realne, odnosnonjihovi domeni jesu intervali na realnoj pravoj.
Neka su ispunjeni sledeci uslovi:(1) −∞ < a < b ≤ +∞;(2) funkcija f(x, y) definisana je na skupu tacka (x, y), gde je x ∈ [a, b),
a y ∈ Y (Y ⊂ R) je neki skup parametara;(3) Za svako ξ ∈ [a, b) i svako y ∈ Y postoji Rimanov integral
ξ∫a
f(x, y)dx;
5.3. NESVOJSTVENI PARAMETARSKI INTEGRALI 143
(4) Za svako y ∈ Y integralb∫af(x, y)dx konvergira kao nesvojstveni
integral, odnosno za svako y ∈ Y je definisana funkcija
F (y) ≡b∫a
f(x, y)dx = limξ→b−0
ξ∫a
f(x, y)dx.
Ako su ispunjeni svi uslovi (1)–)4), tada nesvojstveni integral F (y) =b∫af(x, y)
konvergira na skupu Y . Pri tome je tacka b nesvojstvena (singularna) tackatog integrala.
Definicija 5.3.1. Pretpostavimo da nesvojstveni integralb∫af(x, y)dx kon-
vergira na skupu Y . Nesvojstveni integral konvergira ravnomerno po para-metru y ∈ Y , ako za svako ϵ > 0 postoji neko b′ ∈ [a, b), tako da za svakoξ ∈ [b′, b) i svako y ∈ Y vazi ∣∣∣∣∣∣∣
b∫ξ
f(x, y)dx
∣∣∣∣∣∣∣ < ϵ.
U definiciji obicne konvergencije nesvojstvenog integrala tacka b′ se birau zavisnosti od prethodno odabrane tacke y ∈ Y . Prema tome, kada je upitanju obicna konvergencija nesvojstvenog integrala, onda vazi
limξ→b−0
b∫ξ
f(x, y)dy = limξ→b−0
b∫a
f(x, y)dx−ξ∫a
f(x, y)dx
= 0.
Sa druge strane, u definicije ravnomerne konvergencije nesvojstvenog inte-grala zahteva se postojanje tacke b′ nezavisno od izbora tacke y ∈ Y . Stoga,iz ravnomerne konvergencije nesvojstvenog integrala sledi obicna konvergen-cija tog integrala. Obrnuto tvrdenje u opstem slucaju ne vazi.
Ako su i tacka a i tacka b nesvojstvene tacke integrala F (y), i ako pritome nema drugih nesvojstvenih tacaka na intervalu (a, b), onda se ispiti-
vanje obicne i ravnomerne konvergencije integralab∫af(x, y)dx svodi na is-
tovremeno ispitivanje konvergencije dva integralac∫af(x, y)dx i
d∫cf(x, y)dx,
gde je a < c < b.

144 GLAVA 5. PARAMETARSKI INTEGRALI
Primer 5.3.1. Dokazati da integral
+∞∫0
e−x cosxy dx
konvergira ravnomerno po parametru y ∈ (−∞,+∞).
Dokaz. Za proizvoljan broj ϵ > 0 neka je b′ = ln 2ϵ . Neka su ξ ∈ [b′,+∞) i
y ∈ R proizvoljni. Tada je∣∣∣∣∣∣∣+∞∫ξ
e−x cosxy dy
∣∣∣∣∣∣∣ ≤+∞∫ξ
e−xdx = e−ξ ≤ e−b′=ϵ
2< ϵ.
Time je tvrdenje dokazano.
Ako integralb∫af(x, y)dx konvergira na skupu Y , ali ne konvergira rav-
nomerno po parametru y ∈ Y , onda integralb∫af(x, y)dx konvergira nerav-
nomerno po parametru y ∈ Y . U tom slucaju postoji neko ϵ > 0, tako da zasvako b′ ∈ [a, b) postoje ξ ∈ [b′, b) i y ∈ Y , za koje vazi nejednakost∣∣∣∣∣∣∣
b∫ξ
f(x, y)dx
∣∣∣∣∣∣∣ ≥ ϵ.
Primer 5.3.2. Dokazati da integral I(y) =+∞∫0
ye−xydx konvergira nerav-
nomerno po parametru y ∈ [0,+∞).
Dokaz. Ocigledno je I(0) = 0. Ako je y > 0, koriscenjem smene xy = tproizilazi da je I(y) = 1. Odavde sledi konvergencija integrala I(y) naskupu [0,+∞). Dokazacemo da konvergencija nije ravnomerna. Neka jeϵ = e−1. Za svako b′ ∈ (0 +∞) neka je ξ = b′ i y = 1/b′ i
+∞∫ξ
ye−xydx =
+∞∫b′
ye−xydx =
+∞∫b′y
e−tdt =
+∞∫1
e−tdt =1
e.
Sledi da integral I(y) ne konvergira ravnomerno po parametru y na skupu[0,+∞).

5.3. NESVOJSTVENI PARAMETARSKI INTEGRALI 145
Dokazujemo Vajerstrasov2 kriterijuma za utvrdivanje ravnomerne kon-vergencije nesvojstvenog integrala.
Teorema 5.3.1. (Vajerstras) Pretpsotavimo da su ispunjeni sledeci uslovi:
(1) Za svako y ∈ Y i svako b′ ∈ (a, b) funkcija f(x, y) integrabilna pox ∈ [a, b′];
(2) Postoji funkcija φ : [a, b) → R takva da za svako y ∈ Y i svakox ∈ [a, b) vazi nejednakost |f(x, y)| ≤ φ(x);
(3) Nesvojstveni integralb∫aφ(x)dx konvergira.
Tada integralb∫af(x, y)dx konvergira ravnomerno po parametru y ∈ Y .
Dokaz. Na osnovu konvergencije integralab∫aφ(x)dx sledi da za svako ϵ > 0
postoji neki broj b′ ∈ [a, b), takav da za svako ξ ∈ [b′, b) vazi nejednakost
0 ≤b∫ξ
φ(x)dx < ϵ. Za svako ξ ∈ [b′, b) i svako y ∈ Y vazi nejednakost
∣∣∣∣∣∣∣b∫ξ
f(x, y)dx
∣∣∣∣∣∣∣ ≤b∫ξ
|f(x, y)|dx ≤b∫ξ
φ(x)dx < ϵ.
Ovim je pokazana ravnomerna konvergencija integralab∫af(x, y)dx po parametru
y ∈ Y .
Primer 5.3.3. Dokazati da integral
+∞∫0
cosxy
1 + x2dx
konvergira ravnomerno po parametru y ∈ (−∞,+∞).
Dokaz. Na osnovu nejednakosti | cosxy|1+x2
≤ 11+x2
i identiteta+∞∫0
dx1+x2
= π2 ,
prema kriterijumu Vajerstrasa polazni integral konvergira ravnomerno poparametru y ∈ (−∞,+∞).
2Karl Theodor Wilhelm Weierstrass (1815-1897), nemacki matematicar

146 GLAVA 5. PARAMETARSKI INTEGRALI
Teorema 5.3.2. Pretpostavimo da vazi:
(1) Funkcija f(x, y) je neprekidna na skupu [a, b)× [c, d];
(2) Integralb∫af(x, y)dx konvergira ravnomerno po parametru y ∈ [c, d].
Tadab∫af(x, y)dx jeste neprekidna funkcija parametra y ∈ [c, d].
Dokaz. Neka je ϵ > 0 proizvoljan. Na osnovu ravnomerne konvergencije
integralab∫af(x, y)dx po y ∈ [c, d], sledi da postoji b′ ∈ [a, b) takav da za
svako y ∈ [c, d] vazi nejednakost∣∣∣∣∣∣b∫
b′
f(x, y)dx
∣∣∣∣∣∣ < ϵ
2.
Integralb′∫af(x, y)dx je svojstven, i stoga je ovaj integral neprekidna funkcija
parametra y na [c, d]. Neka je y0 ∈ [c, d]. Postoji δ > 0 takav da za svakoy ∈ [c, d] za koje je |y − y0| < δ, vazi∣∣∣∣∣∣
b′∫a
f(x, y)dx−b′∫a
f(x, y0)dx
∣∣∣∣∣∣ < ϵ
2.
Za svako y ∈ [c, d] za koje je |y − y0| < δ sledi da vazi∣∣∣∣∣∣b∫a
f(x, y)dx−b∫a
f(x, y0)dx
∣∣∣∣∣∣ ≤∣∣∣∣∣∣b′∫a
f(x, y)dx−b′∫a
f(x, y0)dx
∣∣∣∣∣∣+
∣∣∣∣∣∣b∫
b′
f(x, y)dx
∣∣∣∣∣∣+∣∣∣∣∣∣b∫
b′
f(x, y0)dx
∣∣∣∣∣∣ < ϵ.
Stoga, integralb∫af(x, y)dx je neprekidna funkcija parametra y u proizvoljnoj
tacki y0 ∈ [c, d].
Sada dokazujemo teoremu o integrabilnosti nesvojstvenog parametarskogintegrala.
5.3. NESVOJSTVENI PARAMETARSKI INTEGRALI 147
Teorema 5.3.3. Pretpostavimo da vazi:(1) Funkcija f(x, y) je neprekidna na skupu [a, b)× [c, d];
(2) Integralb∫af(x, y)dx konvergira ravnomerno po parametru y ∈ [c, d].
Tada vazi formula
d∫c
dy
b∫a
f(x, y)dx =
b∫a
dx
d∫c
f(x, y)dy.
Dokaz. Integralb∫af(x, y)dx je ravnomerno konvergentan po parametru y ∈
[c, d], te je ovim integralom definisana neprekidna funkcija po y ∈ [c, d].
Stoga postoji integrald∫cdy
b∫af(x, y)dx. Na osnovu ravnomerne konvergencije
integralab∫af(x, y)dx po y ∈ [c, d], za svako ϵ > 0 postoji neko b′ ∈ [a, b) tako
da za svako ξ ∈ (b′, b) i svako y ∈ [c, d] vazi nejednakost∣∣∣∣∣∣∣b∫ξ
f(x, y)dx
∣∣∣∣∣∣∣ <ϵ
d− c.
Na osnovu Fubinijeve teoreme o promeni redosleda integracije za svojstveneintegrale, vazi jednakost
d∫c
dy
ξ∫a
f(x, y)dx =
ξ∫a
dx
d∫c
f(x, y)dy.
Vazi sledeca procena:∣∣∣∣∣∣d∫c
dy
b∫a
f(x, y)dx−d∫c
dy
ξ∫a
f(x, y)dx
∣∣∣∣∣∣ =∣∣∣∣∣∣∣d∫c
dy
b∫ξ
f(x, y)dx
∣∣∣∣∣∣∣≤
d∫c
∣∣∣∣∣∣∣b∫ξ
f(x, y)dx
∣∣∣∣∣∣∣ dy <
ϵ
d− c
d∫c
dy = ϵ.
Odavde sledi
limξ→b−0
ξ∫a
dx
d∫c
f(x, y)dy =
b∫a
dx
d∫c
f(x, y)dy.

148 GLAVA 5. PARAMETARSKI INTEGRALI
Time je teorema dokazana.Dokazacemo teoremu o diferencijabilnosti nesvojstvenog parametarskog
integrala.
Teorema 5.3.4. Pretpostavimo da vazi:(1) Funkcije f(x, y) i ∂f(x,y)
∂y su neprekidne na skupu [a, b)× [c, d];
(2) Integralb∫a
∂f(x,y)∂y dx konvergira ravnomerno po parametru y ∈ [c, d];
(3) Za svako y ∈ [c, d] nesvojstveni integralb∫af(x, y) dx konvergira za.
Tada je F (y) =b∫af(x, y)dx neprekidno diferencijabilna funkcija po promenljivoj
y ∈ [c, d] i vazi
d
dy
b∫a
f(x, y)dx =
b∫a
∂f(x, y)
∂ydx.
Dokaz. Za proizvoljno y ∈ [c, d] posmatrajmo ravnomerno konvergentan
integralb∫a
∂f(x,η)∂η dx po parametru η ∈ [c, y]. Prema prethodnoj teoremi o
integraciji ravnomerno konvergentnog integrala po parametru η, sledi davazi
y∫c
dη
b∫a
∂f(x, η)
∂ηdx =
b∫a
dx
y∫c
∂f(x, η)
∂ηdη =
b∫a
f(x, y)dx+ C1, (5.4)
gde je C1 = −b∫af(x, c)dx. Integral φ(η) =
b∫a
∂f(x,η)∂η dx je ravnomerno kon-
vergentan i definise neprekidnu funkciju φ(η) na [c, y]. Tada je na osnovu
osobine svojstvenog integralay∫cφ(η)dη neprekidno diferencijabilna funkcija
po y na [c, d]. Tada je i druga strana jednakosti (5.4), odnosno integralb∫af(x, y)dx neprekidno diferencijabilna funkcija po y na [c, d]. Sada, difer-
enciranjem jednakosti (5.4) po y, sledi tvrdenje teoreme.
Primer 5.3.4. Izracunati integrale Laplasa
I1(a) =
+∞∫0
cos ax
1 + x2dx, I2(a) =
+∞∫0
x sin ax
1 + x2dx, a ∈ R.
5.3. NESVOJSTVENI PARAMETARSKI INTEGRALI 149
Resenje. Izracunacemo integral I1(a). Vazi ocigledna formula
1
1 + x2=
+∞∫0
e−y(1+x2)dy.
Stoga je
I1(a) =
+∞∫0
dx
+∞∫0
e−y(1+x2) cos ax dy.
Posmatra se pomocna funkcija
L(a, b) =
+∞∫0
dx
+∞∫0
e−y−(b+y)x2 cos ax dy, b > 0. (5.5)
Podintegralna funkcija f(x, y) = e−y−(b+y)x2 cos ax je neprekidna za x, y ∈[0,+∞). Na osnovu nejednakosti∣∣∣e−y−(b+y)x2
∣∣∣ ≤ mine−y, e−bx2,
a prema Vajerstrasovom kriterijumu, integrali
+∞∫0
e−y−(b+y)x2 cos ax dy,
+∞∫0
e−y−(b+y)x2 cos ax dx
su ravnomerno konvergentni (prvi ravnomerno konvergentan po x, a drugipo y). Na osnovu nejednakosti
+∞∫0
dx
+∞∫0
∣∣∣e−y−bx2−yx2) cos ax∣∣∣ dx ≤+∞∫0
e−bx2dx
+∞∫0
e−ydy,
sledi da je integral, kojim je definisana funkcija L(a, b) konvergentan. Prematome, moguce je promeniti redosled integracije u (5.5) i dobija se
L(a, b) = (5.6)
=+∞∫0
e−ydy+∞∫0
e−(b+y)x2 cos ax dx =+∞∫0
e−y√b+y
dy+∞∫0
e−t2cos at√
b+ydt. (5.7)

150 GLAVA 5. PARAMETARSKI INTEGRALI
Neka je J(c) =+∞∫0
e−x2cos cx dx. Tada funkcija J(c) zadovoljava difer-
encijalnu jednacinu J ′(c) + c2J(c) = 0, te je J(c) =
√π2 e
−c2/4. Sada, iz (5.6)sledi
L(a, b) =
+∞∫0
1√b+ y
J
(a√b+ y
)e−ydy =
√πek
+∞∫√k
e−(a2/(4t2)+t2)dt.
Integral+∞∫0
e−bx2 cos ax
1 + x2dx
je ravnomerno konvergentan po b ≥ 0, stoga je L(a, b) neprekidna funkcijapo b. Prema tome, vazi
I1(a) = limb→0+
L(a, b) =√π
+∞∫0
e−(a2/(4t2)+t2)dt.
Preostaje da se izracuna integral
K(µ) =
+∞∫0
e−(y2+µ2/y2)dy.
Funkcija µ 7→ K(µ) je parna, pa je dovoljno odrediti ovu funkciju za µ > 0.Funkcija K(µ) zadovoljava diferencijalnu jednacinu K ′(µ) = −2K(µ), pa je
stoga K(µ) =√π2 e
−2µ. Konacno,
I1(a) =√πK
(|a|2
)=π
2e−|a|, a ∈ R.
Dokazujemo Abelov3 i Dirilleov4 kriterijum za utvrdivanje ravnomernekonvergencije nesvojstvenih parametarskih integrala.
Teorema 5.3.5. (Abel) Pretpostavimo da vazi:
(1) Integral+∞∫af(x, y)dx ravnomerno konvergira po y ∈ Y ;
3Niels Henrik Abel (1802-1829), norveski matematicar4Johann Peter Gustav Lejeune Dirichlet (1805-1859), nemacki matematicar

5.3. NESVOJSTVENI PARAMETARSKI INTEGRALI 151
(2) Funkcija g(x, y) je monotona po x;
(3) Postoji L > tako da za svako x ∈ (a,+∞) i svako y ∈ Y vazi|g(x, y)| ≤ L.
Tada je integral+∞∫0
f(x, y)g(x, y) dx ravnomerno konvergentan po y ∈ Y .
Dokaz.
Teorema 5.3.6. (Dirihle) Pretpostavimo da je ispunjeno:
(1) Postoji broj L > 0 tako da za svako y ∈ Y i svako t ≥ a vazi∣∣∣∣ t∫af(x, y)dx
∣∣∣∣ ≤ L;
(2) Funkcija g(x, y) je monotona po x;
(3) g(x, y)y∈Y⇒ 0 kada x→ +∞.
Tada integral+∞∫af(x, y)g(x, y)dx konvergira ravnomerno po y ∈ Y .
Primer 5.3.5. Izracunati Dirihleov integral+∞∫0
sinxx dx.
Resenje. Neka je I =+∞∫0
sinαxx dx i J =
+∞∫0
sinαxx e−kxdx, k ≥ 0. Podinte-
gralna funkcija integrala J , kao i njen parcijalni izvod po α, jesu neprekidnefunkcije po x ≥ 0 i α ≥ 0. Integral J je ravnomerno konvrgentan na osnovuAbelovog kriterijuma. Izvodni integral od J po α je ravnomerno konvergen-tan na osnovu Vajerstrasovog kriterijuma. Prema tome,
dJ
dα=
+∞∫0
e−kx cosαxdx =k
α2 + k2.
Integracijom po α proizilazi da vazi J = arctg αk + C. Ovde je C = 0, sto
se lako proverava za α = 0. Integral J ravnomerno konvergira po k ≥ 0.Prema tome, J je neprekidna funkcija po k. Sledi I = lim
k→0+J . Za α > 0 je
I = limk→0+
J = limk→0+
arctgα
k=π
2.
Za α = 1 dobija se vrednost Dirihleovog integrala I = π2 .
152 GLAVA 5. PARAMETARSKI INTEGRALI
5.4 Gama funkcija (Ojlerov integral drugog reda)
Gama funkcija Ojlera, u oznaci Γ(x), definisana je kao nesvojstveni param-etarski integral sa dve nesvojstvene tacke na sledeci nacin:
Γ(x) =
+∞∫0
tx−1e−tdt, x > 0. (5.8)
Nesvojstvene tacke su t = 0 (funkcija je neogranicena u okolini ove tacke zasvako x > 0) i t = +∞.
Predstavimo ovaj integral kao sumu dva integrala na sledeci nacin:
Γ(x) =
1∫0
tx−1e−tdt+
+∞∫1
tx−1e−tdt.
Pokazacemo da oba ova integrala konvergiraju ravnomerno po parametrux na svakom ogranicenom segmentu [a, b], gde je 0 < a < b < +∞.
Neka je 0 < a < 1, b > 1 i x ∈ [a, b]. Tada je 0 ≤ tx−1 ≤ ta−1 za
0 ≤ t ≤ 1 i1∫0
ta−1dt = a−1. Prema Vajerstrasovom kriterijumu, integral
1∫0
tx−1e−tdt ravnomerno konvergira po parametru x ∈ [a, b].
Analogno, ako je t ≥ 1, onda je 0 ≤ tx−1e−t ≤ tb−1e−t i+∞∫1
tb−1e−tdt kon-
vergira (ovo je lako proveriti uzastopnom primenom parcijalne integracije).
Na osnovu Vajerstrasovog kriterijuma, sledi da je integral+∞∫1
tx−1e−tdx
ravnomerno konvergentan po parametru x ∈ [a, b]. Ovim je pokazanoda je gama funkcija definisana ravnomerno konvergentnim integralom poparametru x na svakom segmentu [a, b] za koji vazi 0 < a < b < +∞.
Funkcija f(x, t) = tx−1e−t je neprekidna za t > 0 i x > 0, te na osnovuranijih rezultata gama funkcija x 7→ Γ(x) je neprekidna po x na svakomsegmentu [a, b]ı[0,+∞). Prema tome, Γ(x) je neprekidna funkcija za svakox > 0.
Ako je x > 0, onda je funkcija Γ(x) neprekidno diferencijabilna, pri cemuvazi
Γ′(x) =
1∫0
tx−1e−t ln t dt+
+∞∫1
tx−1e−t ln t dt =
+∞∫0
tx−1 ln t e−tdt.
5.4. GAMA FUNKCIJA (OJLEROV INTEGRAL DRUGOG REDA) 153
Diferenciranje pod znakom integrala je dopusteno jer oba integrala u prethod-noj formuli ravnomerno konvergiraju po x ∈ [a, b]. Indukcijom se pokazujeda za x > 0 funkcija x 7→ Γ(x) jeste beskonacno puta diferencijabilna, pre-ciznije
Γ(n)(x) =
+∞∫0
tx−1e−t(ln t)ndt, n = 0, 1, 2, . . .
Vazi Γ(1) = Γ(2) = 1, te na osnovu Rolove teoreme sledi da postoji nekoξ ∈ [1, 2] tako da je Γ′(ξ) = 0. Takode je Γ′′(x) > 0 za svako x > 0. Stogaje x 7→ Γ(x) funkcija konveksna prema gore sa jedinstvenim pozitivnimminimumom.
Nije tesko pokazati da formula kojom je definisana gama funkcija imasmisla i za kompleksne brojeve z za koje je Re z > 0. Prema tome, Γ(z) jeregularna funkcija kompleksne promenljive z u desnoj poluravni. Detaljnijeo funkcijama kompleksne promenljive u narednoj glavi.
Parcijalnom integracijom u = tx−1, dv = e−tdt, proizilazi formula
Γ(x+ 1) =
+∞∫0
txe−tdt = x · Γ(x). (5.9)
Ovo je osnovno funkcionalno svojstvo gama funkcije. Specijalno, ako je nprirodan broj, onda je
Γ(n+ 1) = n · Γ(n) = · · · = n! .
Iz formule (5.9) sledi da vazi
Γ(x) =Γ(x+ 1)
x→ +∞ kada x→ 0 + .
Stoga je y-osa vertikalna asimptota gama funkcije. Takode Γ(x) → +∞kada x→ +∞.
Uvodenjem smene t = − ln z u formulu (5.8), sledi da vazi
Γ(x) =
1∫0
(ln
1
z
)x−1
dz.
Niz funkcija fn(z) = n(1 − z1/n) monotono raste i ravnomerno konvergirafunkciji f(z) = − ln z na svakom intervalu sadrzanom u skupu (0, 1). Prema

154 GLAVA 5. PARAMETARSKI INTEGRALI
tome vazi
1∫0
(ln
1
z
)x−1
dz = limn→∞
nx−1
1∫0
(1− z1/n)x−1dx. (5.10)
5.5 Beta funkcija (Ojlerov integral prvog reda)
Beta funkcija definisana je kao integral koji zavisi od dva parametra:
B(x, y) =
1∫0
tx−1(1− t)y−1dt. (5.11)
Ovaj integral ima dve nesvojstvene tacke, t = 0 i t = 1. Naime, funkcijaf(x, y) = tx−1(1 − t)y−1 je neogranicena u okolini bilo koje od ovih dvejutacaka. Ako je
B(x, y) =
1/2∫0
tx−1(1− t)y−1dt+
1∫1/2
tx−1(1− t)y−1dt,
lako je proveriti da prvi integral konvegira za x > 0, a drugi za y > 0. Prematome, beta funkcija je definisana za x > 0 i y > 0.
Jednostavno je dokazati ravnomernu konvergenciju integrala
1/2∫0
tx−1 ln t dt
za x ≥ x1 > 0. Takode, integral
1∫1/2
tx−1(1− t)y−1 ln(1− t)dt
je ravnomerno konvergentan za y ≥ y1 > 0 i svako x > 0. Na osnovuprethodnog sledi da je beta funkcija diferencijabilna za x > 0 i y > 0 i vaziformula
∂n+mB
∂xn∂ym=
1∫0
tx−1(1− t)y−1 lnn t lnm(1− t)dt, n,m = 0, 1, 2, . . .

5.5. BETA FUNKCIJA (OJLEROV INTEGRAL PRVOG REDA) 155
Koriscenjem smene τ = 1− t u (5.11), sledi da je B(x, y) = B(y, x).
Vazi formula
B(x, y) =
+∞∫0
ux−1
(1 + u)x+ydu =
1∫0
ux−1 + uy−1
(1 + u)x+ydu.
Prva formula proizilazi iz definicije beta funkcije i smene t = u/(1 −u). Da bi pokazali drugu formulu, treba dobijeni integral razdvojiti na dvaintegrala, prvi na segmentu [0, 1], a drugi na segmentu [1,+∞). Kod drugogintegrala primeniti smenu v = 1/u.
Iz prethodne formule za x+ y = 1 sledi
B(x, 1− x) =
+∞∫0
ux−1
1 + udu =
π
sinπx.
Specijalno, B(1/2, 1/2) = π.
Primenom parcijalne integracije na (5.11) sledi da vazi
B(x, y) =1
a
1∫0
(1− t)y−1d(tx) =y − 1
x
1∫0
(1− x)y−2txdt
=y − 1
x
1∫0
tx−1(t− 1 + 1)(1− t)y−2dt
=y − 1
xB(x, y − 1)− y − 1
xB(x, y).
Prema tome, vazi rekurenta relacija
B(x, y) =y − 1
x+ y − 1B(x, y − 1), y > 1.
Analogno, vazi i formula
B(x, y) =x− 1
x+ y − 1B(x− 1, y), x > 1.
Ako je n ∈ N, na osnovu prethodnog, vazi
B(x, n) =n− 1
x+ n− 1
n− 2
x+ n− 2· · · 1
x+ 1B(x, 1).

156 GLAVA 5. PARAMETARSKI INTEGRALI
Obzirom da je B(x, 1) = 1x , onda je
B(x, n) =1 · 2 · · · (n− 1)
x(x+ 1) · · · (x+ n− 1).
Specijalno, ako je m ∈ N, tada je
B(m,n) =(m− 1)!(n− 1)!
(m+ n− 1)!.
Uvodenjem smene z = yn u integralu (5.10), sledi formula
Γ(x) = limn→∞
nx1∫
0
yn−1(1− y)x−1dx = limn→∞
nxB(n, a).
Zamenom vrednosti za beta funkciju, sledi formula Gaus-Ojlera
Γ(x) = limn→∞
nx(n− 1)!
x(x+ 1) · · · (x+ n− 1).
Iz Gaus-Ojlerove formule sledi formula
Γ(x)Γ(1− x) =1
xlimn→∞
1
(1− x1/12)(1− x2/22) · · · (1− x2/(n− 1)2),
ili, za x ∈ (0, 1):
Γ(x)Γ(1− x) =1
x
+∞∏n=1
1(1− x2
n2
) =π
sinπx.
Poslednja formula naziva se formula dopune.
U integralu (5.8) uvede se smena t = sz, gde je s > 0. Tada se dobijajednakost
Γ(x)
sx=
+∞∫0
zx−1e−szdz.
U ovoj formuli zameni se x sa x+ y, a s se zameni sa s+ 1. Tada se dobijajednakost
Γ(x+ y)
(1 + s)x+y=
+∞∫0
zx+y−1e−(1+s)zdz.

5.5. BETA FUNKCIJA (OJLEROV INTEGRAL PRVOG REDA) 157
Poslednja jednakost se pomnozi sa sx−1 i integrali po s u granicama od 0do +∞. Dobija se jednakost
Γ(x+ y)
+∞∫0
sx−1ds
(1 + s)x+y=
+∞∫0
zx−1dz
+∞∫0
zx+y−1e−(1+s)zdz.
Na kraju, sledi
G(x+ y)B(x, y) =
+∞∫0
zx+y−1e−zdz
+∞∫0
sx−1e−szdz
=
+∞∫0
zx+y−1e−yΓ(x)
zadz
= Γ(x)
+∞∫0
zy−1e−zdz = Γ(x)Γ(y).
Prema tome, veza izmedu beta i gama funkcije jeste:
B(x, y) =Γ(x)Γ(y)
Γ(x+ y). (5.12)
Primer 5.5.1. Dokazati da vaze formule
B(x, x) =1
22x−1B
(1
2, x
)i Γ(x)Γ
(x+
1
2
)=
√π
22x−1Γ(2x).
Resenje. Vazi sledeca ocigledna jednakost
B(x, x) =
1∫0
(1
4−(1
2− t
)2)x−1
dt = 2
1/2∫0
(1
4−(1
2− t
)2)x−1
dt
Uvodenjem smene 12 − t =
√s/2, sledi
B(x, x) =1
22x−1
1∫0
s−1/2(1− s)x−1ds =1
22x−1B
(1
2, x
).
Koristeci Γ(1/2) = π i formulu (5.19.1), sledi da vazi
Γ(x)Γ
(x+
1
2
)=
√π
22x−1Γ(2x).
Poslednja formula naziva se formula Lagranza.

158 GLAVA 5. PARAMETARSKI INTEGRALI
Primer 5.5.2. Izracunati integral I =+∞∫0
y2dy1+y4
.
Resenje. Smenom y4 = t proizilazi da vazi
I =1
4
+∞∫0
t−1/4
1 + tdt =
1
4B
(3
4,3
4
)
=1
4Γ
(3
4
)· Γ(1− 3
4
)=
1
4
π
sin(π/4)=
π
2√2.
Literatura
[1] D. Adnadevic, Z. Kadelburg, Matematicka analiza, Tom I, II, Zavodza udzbenike i nastavna sredstva, Beograd, 1991.
[2] T. M. Apostol, Mathematical Analysis, Addison Wesley Publ. Co.,London, 1974.
[3] M. Asic, J. Vukmirovic, Zbirka zadataka iz analize II, Naucna knjiga,Beograd, 1975.
[4] K. R. Davidson, A. P. Donsig, Real analysis with real applications,Prentice Hall, New Jersey, 2002.
[5] B. N. Demidovic, Sbornik zadac i upraznenii po matematiceskomuanalizu, Nauka, Moskva, 1977.
[6] R. Dimitrijevic, Analiza realnih funkcija vise promenljivih, Nis, 1999.
[7] R. Dimitrijevic, J. Manojlovic, Analiza realnih funkcija visepromenljivih: zbirka zadataka, Nis, 2004.
[8] D. S. Dordevic,Matematika II za studente fizike, prvi deo, Univerzitetu Nisu, Prirodno-matematicki fakultet, Nis, 2004.
[9] G. M. Fihtengolc, Kurs differencialnogo i integralnogo iscislenia,Tom I, II, III, Nauka, Moskva, 1966.
[10] V. A. Ilin, V. A. Sadovnicii, B. H. Sendov, Matematiceskii analiz,Nauka, Moskva, 1979.
[11] L. D. Kudrjavcev, Kurs matematiceskogo analiza, Tom I, II, Visajaskola, Moskva, 1981.
[12] I. I. Ljasko, A. K. Bojarcuk, Ja. G. Gai, G. P. Golovac, Spravocnoeposobie po matematiceskomu analizu, Tom I, II, Visa skola, Kiev,1979.
159
160 LITERATURA
[13] I. I. Ljasko, V. F. Emeljanov, A. K. Bojarcuk, Osnovi klassiceskogoi sovremennogo matematiceskogo analiza, Visa skola, Kiev, 1988.
[14] S. Mardesic, Matematicka analiza u n-dimenzionalnom realnom pros-toru, Prvi dio, Skolska knjiga, Zagreb, 1974.
[15] P. Milicic, M. Uscumlic, Zbirka zadataka iz vise matematike II,Gradevinska knjiga, Beograd, 1971.
[16] S. M. Nikolskii, Kurs matematiceskogo analiza, Tom I, II, Nauka,Moskva, 1975.
[17] D. Perisic, S. Pilipovic, M. Stojanovic, Funkcije vise promenljivih.Diferencijalni i integralni racun, Univerzitet u Novom Sadu, Prirodnomatematicki fakultet, 1997.
[18] W. Rudin, Principles of mathematical analysis, McGrow-Hill, Inc.,New York, 1976.
[19] Ter-Krikorov, M. I. Sabunin, Kurs matematiceskogo analiza, Nauka,Moskva, 1988.
[20] V. A. Zoric, Matematiceskii analiz, Tom I, II, Nauka, Moskva, 1984.





























