Embed Size (px)
Citation preview

Integration of Representation Into Integration of Representation Into Goal-Driven Behavior-Based RobotsGoal-Driven Behavior-Based Robots
ByByMaja J. MataricMaja J. Mataric
Presented byPresented byMurali Kiran. MMurali Kiran. M

About the AuthorAbout the Author
Associate ProfessorAssociate ProfessorComputer Science DepartmentComputer Science Department and and Neuroscience ProgramNeuroscience ProgramDirector, Director, Center for Robotics and Embedded Systems (CRES)Center for Robotics and Embedded Systems (CRES)Co-Director, Co-Director, Robotics Research LabRobotics Research LabPresident-Elect, President-Elect, Academic SenateAcademic SenateChair, Chair, VSoEVSoE Women in Science and Engineering (Women in Science and Engineering (WiSEWiSE))ViterbiViterbi School of Engineering ( School of Engineering (VSoEVSoE)), , University of Southern CaliforniaUniversity of Southern California
Homepage: http://www-robotics.usc.edu/~maja/Homepage: http://www-robotics.usc.edu/~maja/

Contact AddressContact Address
Computer Science DepartmentComputer Science DepartmentUniversity of Southern California University of Southern California Office: Ronald Tutor Hall (RTH) 407Office: Ronald Tutor Hall (RTH) 407Mailing address: Henry Salvatori, Mailcode Mailing address: Henry Salvatori, Mailcode 07810781941 West 37th Place 941 West 37th Place Los Angeles, CA 90089-0781 USA Los Angeles, CA 90089-0781 USA

Task to performTask to perform
Explore an office environmentExplore an office environment
Construct and maintain a map based on the Construct and maintain a map based on the landmarks it discovers.landmarks it discovers.

TOTOTOTO
Omni directional three wheeled base.Omni directional three wheeled base. Twelve ultrasonic ranging sensorsTwelve ultrasonic ranging sensors Flux gate compassFlux gate compass

TOTOTOTO

CompetenciesCompetencies
Basic navigationBasic navigation Landmark detectionLandmark detection Map-related computationMap-related computation


Robot BehaviorRobot Behavior
StrollStroll AvoidAvoid AlignAlign CorrectCorrect
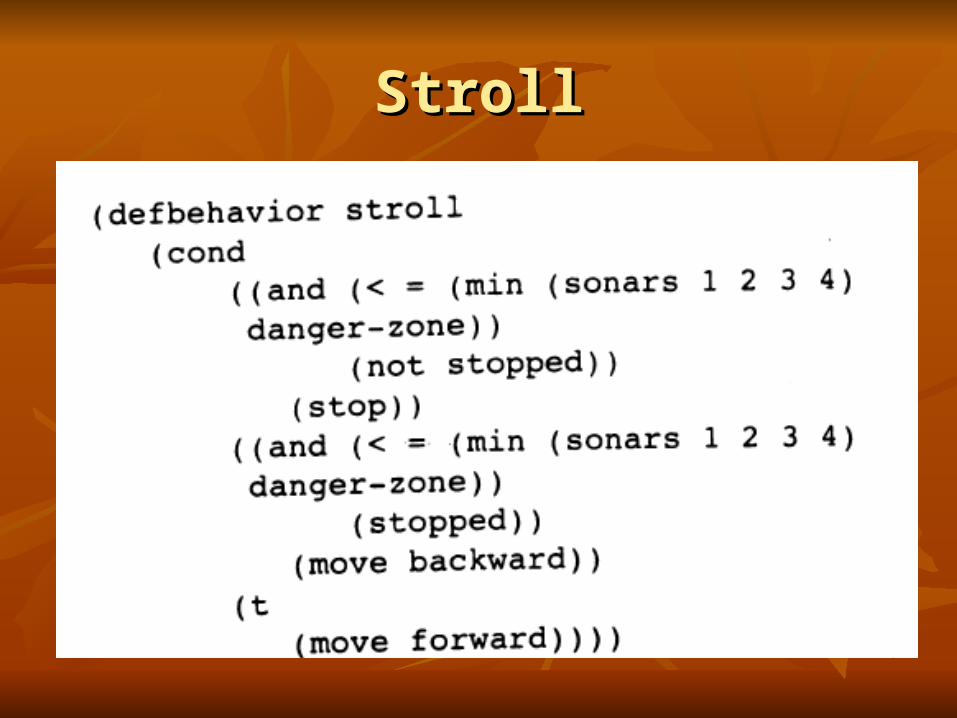
StrollStroll

AvoidAvoid

AlignAlign

CorrectCorrect
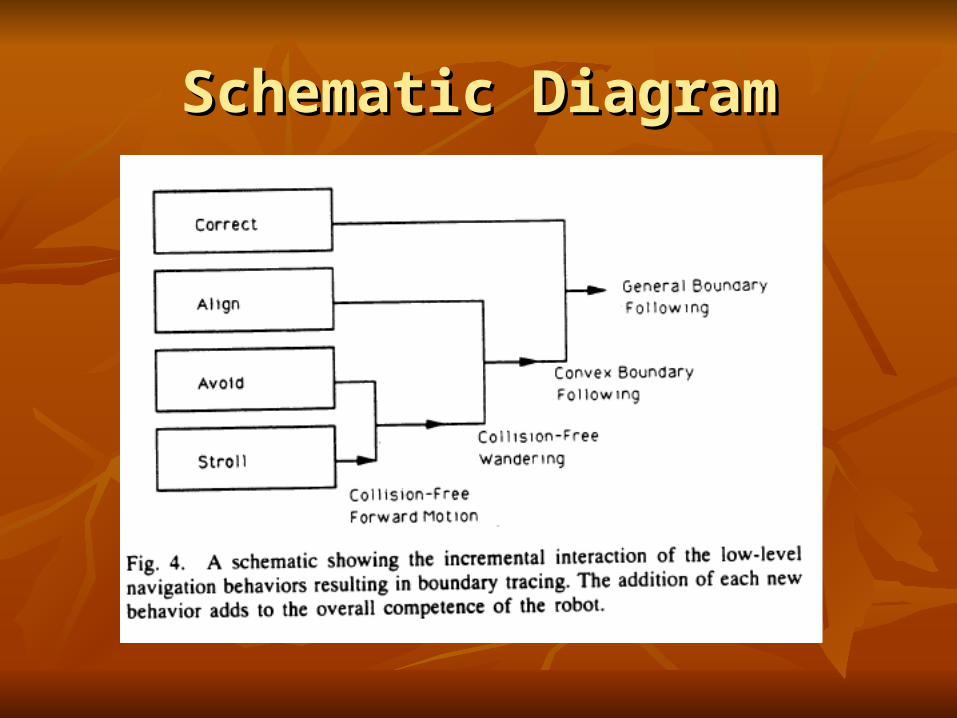
Schematic DiagramSchematic Diagram

Landmark DetectionLandmark Detection


Acquiring world modelAcquiring world model
SensorsSensors Perceptual limitationsPerceptual limitations Sensor noiseSensor noise Drift or slippageDrift or slippage Complexity and dynamicsComplexity and dynamics

Fundamental paradigmFundamental paradigm
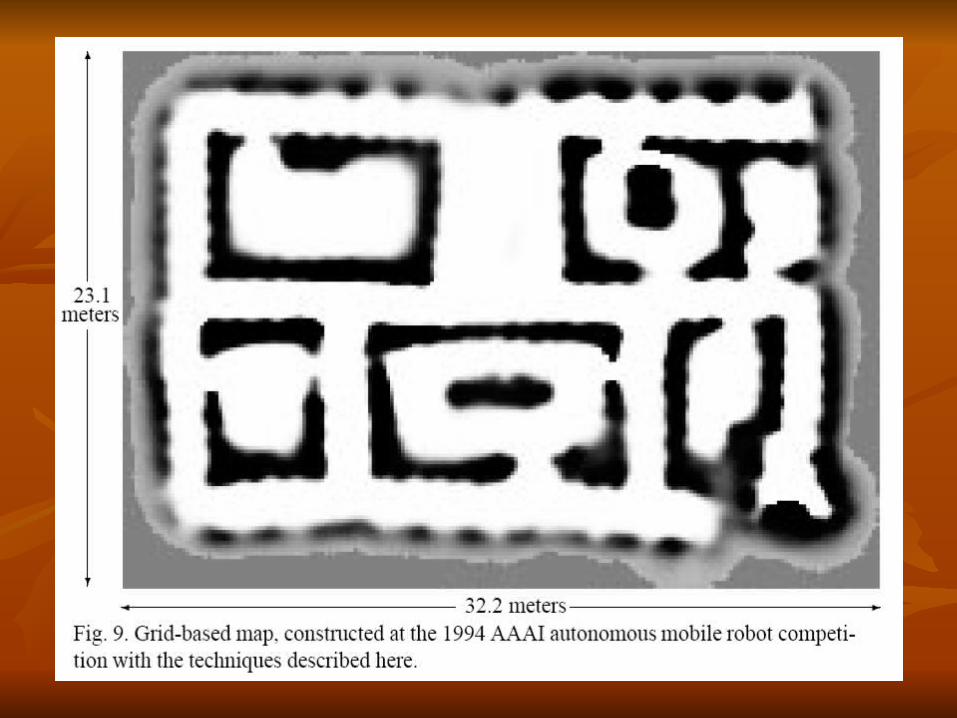
Grid-based (metric) paradigm Grid-based (metric) paradigm
Topological paradigmTopological paradigm

Grid-based paradigmGrid-based paradigm
Represents environment by evenly spaced Represents environment by evenly spaced grids.grids.
Grid cell may represent an obstacle in the Grid cell may represent an obstacle in the corresponding region of the environent.corresponding region of the environent.

Topological paradigmTopological paradigm
Represents robots environments by graphsRepresents robots environments by graphs Nodes in such graphs represent distinct places Nodes in such graphs represent distinct places
or landmarks.or landmarks. They are connected by arcs if they have a They are connected by arcs if they have a
direct path between them.direct path between them. Topological maps are build over Grid based Topological maps are build over Grid based
mapsmaps We are concerned about the topological We are concerned about the topological
paradigmparadigm

DifferencesDifferences

Constructing topological mapsConstructing topological maps
ThresholdingThresholding Voronoi DiagramVoronoi Diagram Critical pointsCritical points Critical linesCritical lines Topological graphTopological graph
ThresholdingThresholding
Cells whose occupancy value is below the Cells whose occupancy value is below the threshold are considered as free space.threshold are considered as free space.
Free space denoted by Free space denoted by C C
All other points are considered as occupied.All other points are considered as occupied.
__ They are denoted by They are denoted by C. C.
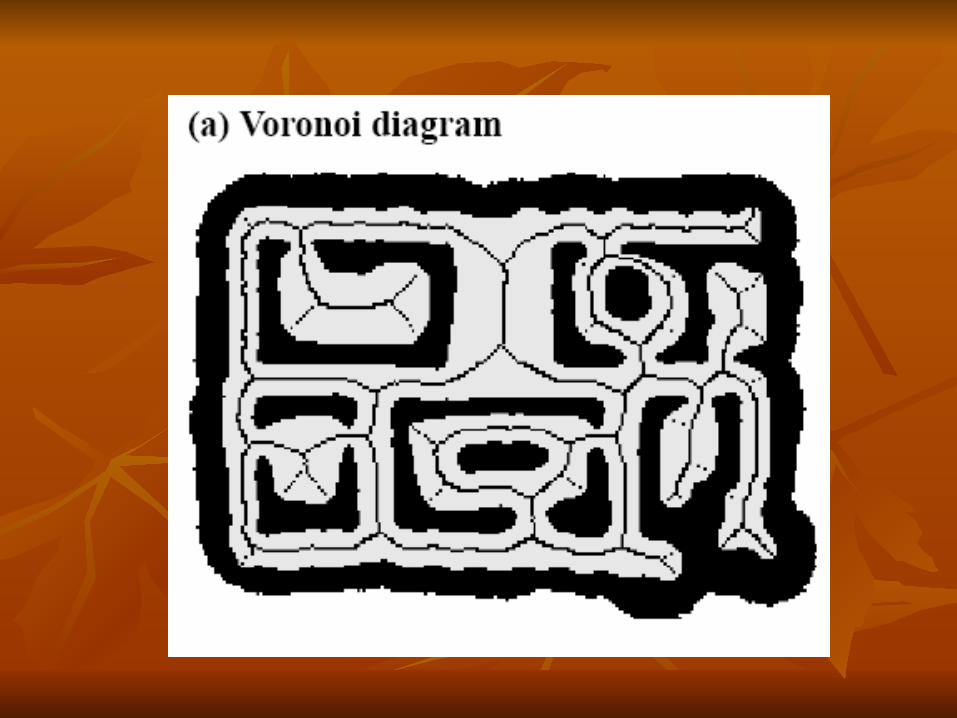
Voronoi DiagramVoronoi Diagram
(x,y) is a point in C.(x,y) is a point in C. Nearest points to (x,y) in the occupied space Nearest points to (x,y) in the occupied space
are called basic points.are called basic points. Clearence is the distance between the basic Clearence is the distance between the basic
points and (x,y).points and (x,y). Voronoi diagram is the set of all points in the Voronoi diagram is the set of all points in the
free space that have atleast two different basic free space that have atleast two different basic points.points.


Critical pointsCritical points
Critical points (x,y) are points on the Voronoi diagram that minimize clearance locally.
Each critical point (x,y) has the following two properties:
(a) it is part of the Voronoi diagram. (b) the clearance of all points in an
"neighborhood of (x,y) is not smaller.


Critical LinesCritical Lines
Critical lines are obtained by connecting each critical point with its basis points.

Topological graphTopological graph
The partitioning is mapped into an isomorphic The partitioning is mapped into an isomorphic map.map.


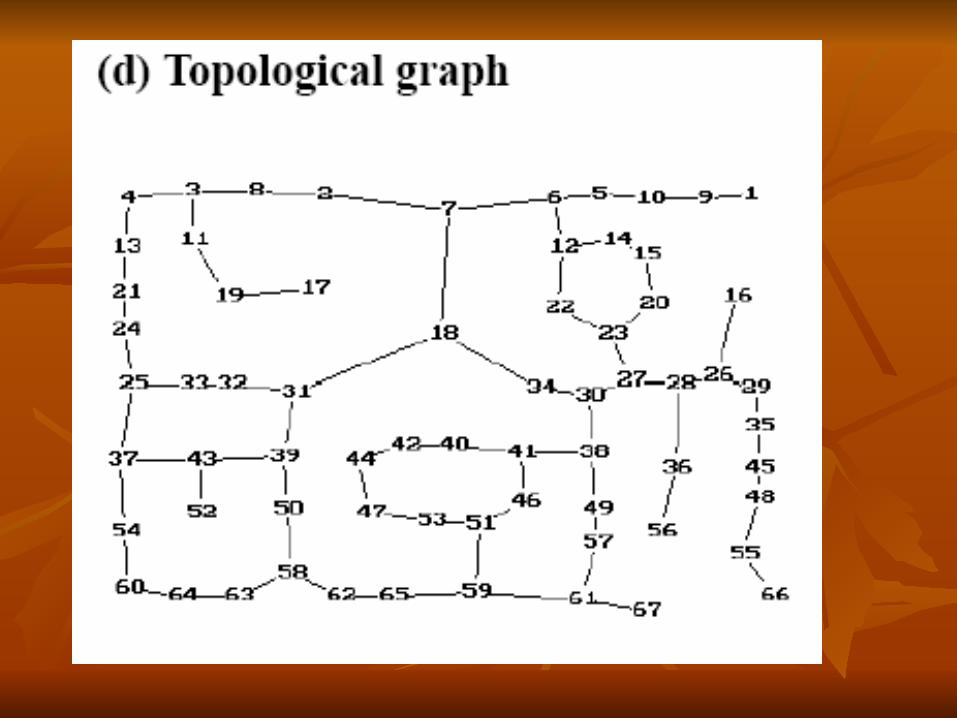

The TupleThe Tuple<T,C,L,P><T,C,L,P>

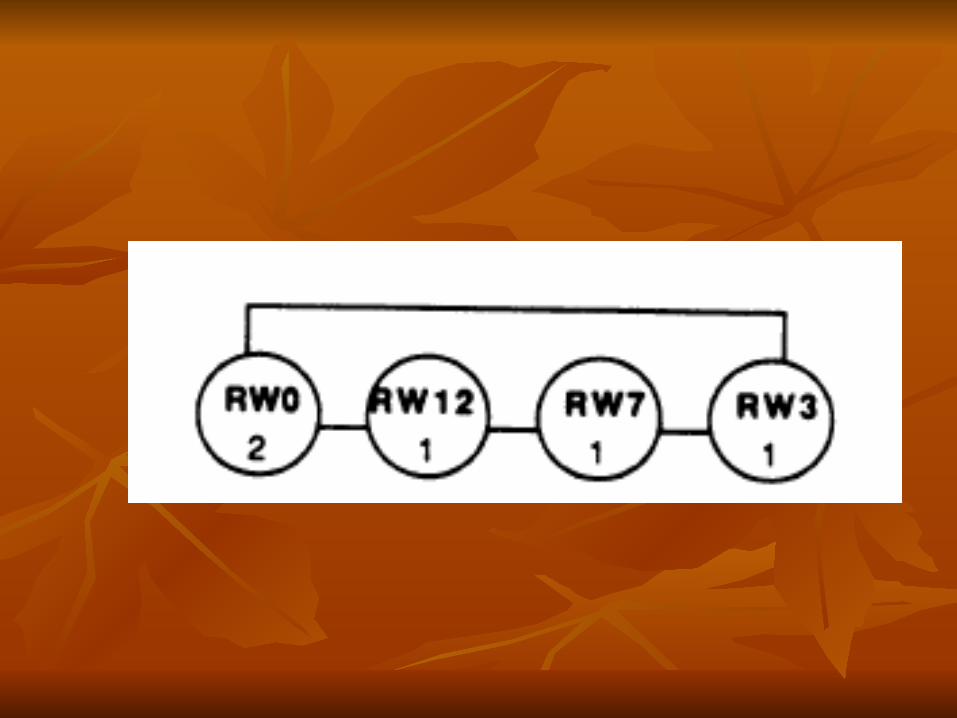
Graph RepresentationGraph Representation

Mapping AlgorithmMapping Algorithm


ConclusionConclusion





























