Embed Size (px)
Citation preview

In
SD
a
ARRA
KPMFH
1
eiigIaigttaiPtppo
sbtm
a
0h
Energy and Buildings 51 (2012) 29–38
Contents lists available at SciVerse ScienceDirect
Energy and Buildings
j ourna l ho me p age: www.elsev ier .com/ locate /enbui ld
ntelligent maximum power point tracking for PV system using Hopfield neuraletwork optimized fuzzy logic controller
ubiyanto Subiyanto ∗, Azah Mohamed, M.A. Hannanepartment of Electrical, Electronic & Systems Engineering, Universiti Kebangsaan Malaysia, 43600 Bangi, Selangor, Malaysia
r t i c l e i n f o
rticle history:eceived 17 February 2012eceived in revised form 27 March 2012ccepted 10 April 2012
a b s t r a c t
This paper presents a new method for maximum power point tracking of photovoltaic (PV) energy har-vesting system by using the Hopfield neural network (HNN) optimized fuzzy logic controller (FLC). Inthe proposed method, HNN is utilized to automatically tune the FLC membership functions instead of
eywords:hotovoltaicaximum power point tracking
uzzy logic
adopting the trial-and-error approach. A complete simulation model of a PV system using the MAT-LAB/Simulink software is developed to validate the HNN optimized FLC. A hardware prototype of the PVmaximum power point tracking controller was also implemented using the dSPACE DS1104 controller.Simulation and experimental results show the performance and effectiveness of the HNN optimized FLC.It is proven that the proposed HNN optimized FLC can provide accurate tracking of the PV maximumpower point and improve the efficiency of PV systems.
opfield neural network. Introduction
Among the renewable energy sources, the photovoltaic (PV)nergy from solar irradiation has received a great attention, ast appears to be one of the most promising clean energy sourcesn the world [1,2]. The most common PV energy harvesting arerid connected PV application [3] and building integrated PV [4].n general, PV generation systems have two major problems thatre related to low conversion efficiency of about 9–17% especiallyn low irradiation conditions and the amount of electric powerenerated by PV arrays varies continuously with weather condi-ions [5,6]. Another factor that affects PV conversion efficiency ishe solar cell current–voltage (I–V) and power–voltage (P–V) char-cteristics as shown in Fig. 1 which are nonlinear and vary withrradiation and cell temperature [5]. There is a unique point on the–V curves, known as the maximum power point (MPP), in which athis point the solar cell is said to operate at maximum efficiency androduces its maximum output power. Therefore, maximum poweroint tracking (MPPT) is the important part in PV energy system inrder to maintain the PV array’s operating point at its MPP.
Many MPPT algorithms have been presented in the literature,tarting with simple techniques such as voltage and current feed-
ack based MPPT to a more improved power based MPPT such ashe perturbation and observation (P&O) technique and the incre-ental conductance technique [5]. Recently, fuzzy logic is applied
∗ Corresponding author. Tel.: +60 3 89216590; fax: +60 3 89216146.E-mail addresses: biyantote [email protected] (S. Subiyanto),
[email protected] (A. Mohamed), [email protected] (M.A. Hannan).
378-7788/$ – see front matter © 2012 Elsevier B.V. All rights reserved.ttp://dx.doi.org/10.1016/j.enbuild.2012.04.012
© 2012 Elsevier B.V. All rights reserved.
for tracking the MPP of PV systems because it has the advantages ofbeing robust, simple in design and minimal requirement for accu-rate mathematical model [7–9]. It is found that fuzzy logic basedP&O and hill climbing MPPT methods perform better due to opti-mize perturbation. However, the fuzzy logic methods depend oncareful selection of parameters, definition of membership func-tions and fuzzy rules. Developing fuzzy logic method also involvesexpert knowledge and experimentation in selecting parametersand membership functions. For this reason, adaptive fuzzy logiccontrol [10,11] and parameter optimization techniques such asgenetic algorithm [12] and particle swam optimization [13] havebeen applied for developing better MPPT algorithms.
For the purpose of developing a more robust MPPT algorithm,a new variant of intelligent technique based on the Hopfield neu-ral network (HNN) is proposed and used together with fuzzy logicbased MPPT controller in a PV system. Here, the fuzzy logic MPPTcontroller is integrated with the HNN to optimize the membershipfunction of the fuzzy system. The HNN has been applied to vari-ous fields [14,15] and in solving optimization problems, the HNNhas a well-demonstrated capability of finding solutions to complextasks based on convergence of the energy function and coefficientsweighting [16].
2. Maximum power point tracking controller
The output power of PV systems is maximized by operating
them close to the maximum power point (MPP) [17,18]. However,the position of the MPP on the PV module depends strongly onsolar irradiation and temperature [18]. To achieve this, a maximumpower point tracking (MPPT) controller is required to track the MPP
30 S. Subiyanto et al. / Energy and B
Fig. 1. Characteristics of a typical PV module.
cviatcamtv
Fig. 2. MPPT controller of a PV system.
ontinuously. MPPT controller is an electronic system that plays aital role in operating the PV modules in a manner that it producests maximum power according to the situation [19]. To achieve this,
maximum power point tracking (MPPT) controller is required torack the optimum power of the PV system. The arrows on the P–Vurve in Fig. 1 indicate that the MPP can be tracked from both sidesnd oscillated around the MPP. An MPPT controller is usually imple-
ented together with a boost converter and connected betweenhe PV panel and load as shown in Fig. 2 [19,20]. The DC–DC con-erter works to draw power from PV based on a MPPT algorithm. It
Fig. 3. Structure of fuzz
uildings 51 (2012) 29–38
seeks and draws current or voltage at the MPP of PV panel, so thatmaximum power is delivered to the load.
3. Fuzzy logic controller and Hopfield neural network
3.1. Fuzzy logic controller
A typical FLC includes three basic components, fuzzificationmodule, inference engine, and defuzzification module. The basicstructure of a fuzzy logic controller (FLC) is shown in Fig. 3 [21].There are two input signals (xk
1 and xk2) and one output signal (yk),
and that all the signals are crisp value. The fuzzification converts thecrisp value of current signal into suitable linguistic values such assmall and large associate membership functions based on the fuzzyset. The inference engine in the FLC makes decision based on fuzzyrule. The engine creates the control actions in fuzzy terms accordingto the information from the fuzzification. The fuzzy rule performslogic IF–THEN in linguistic variable fuzzy term. The defuzzificationmodule converts an inferred fuzzy controller output into crisp valueto control the physical plant. The following formula is commonlyused for defuzzification, namely “center-of-gravity” [21]:
yk =∑n
i=1�(Yk)iYi∑ni=1�(Yk)i
(1)
where �(Yk) is the degree of membership of the output variable Yat process kth and n denotes the number of fuzzy set.
3.2. Hopfield neural network
The HNN network is useful for associative memory and opti-mization in a symmetrical structure. The basic structure of the HNNis shown in Fig. 4 [22,23]. The HNN uses a two-state threshold“neuron” that follows a stochastic algorithm where each neuron,or processing element, Ni have two states with values either 0 or 1.The inputs of each neuron come from two sources; external inputs,Ii and inputs from other neurons, Nj. The total input to neuron Ni isgiven by:
in Ni =∑i /= j
Ii + o Njwji (2)
where in Ni, total input to neuron i; wij, synaptic interconnectionstrength from neuron Ni to neuron Nj; Ii, external input to neuronNi; o Nj, output of neuron Nj.
y logic controller.

S. Subiyanto et al. / Energy and B
vw
o
T
E
oivai
c
u
w
F
o
Fig. 4. Discrete Hopfield neural network.
Each neuron samples its input at random times. It changes thealue of its output or leaves it fixed according to a threshold ruleith thresholds �i:
Ni ={
1 if in Ni ≥ �i
0 if in Ni < �i(3)
hen the energy function of the HNN is defined as
= −12
∑i /= j
∑j
o Ni · o Nj · wij −∑
i
Ii · o Ni +∑
i
�i · o Ni (4)
The continuous and deterministic model of the HNN is basedn continuous variables and responses but retains all of the signif-cant behaviors of the original model described above. The outputariable o Ni for neuron Ni has values in the range of 0 ≤ o Ni ≤ 1nd the input–output function is a continuous and monotonicallyncreasing function of the input in Ni to neuron Ni.
Similar to the discrete HNN, the input of neurons ith of theontinuous HNN is defined as
i = Ii +∑
j
wij · o Nj (5)
here ui, input of the HNN neuron.A typical output of neuron Ni is a sigmoid function as shown in
ig. 5. Mathematically it is given by:
Ni = g(�ui) = 1
1 + e−�ui(6)
0
1 g( u)
Fig. 5. Curve of a sigmoid function.
uildings 51 (2012) 29–38 31
where � is the gain that determines the shape of the sigmoid func-tion.
The energy function of the continuous HNN is similarly definedas [14],
E = −
⎡⎣1
2
n∑i=1
n∑j=1
wijo Ni · o Nj +n∑
i=1
Iio Ni
⎤⎦ (7)
and its change in energy is given by
�E = −
⎡⎣∑
j
o Nj · wij + Ii
⎤⎦�o Ni (8)
dE/dt is always less than zero because g (6) is a monotonicallyincreasing function. Therefore, the network solution moves in thesame direction as the decrease in energy. The solution seeks out aminimum of E and comes to a stop at stability point [14].
4. Design of MPPT controller using Hopfield neuralnetwork optimized fuzzy logic controller
The proposed MPPT controller is designed using fuzzy logic andHNN to develop optimal membership function of the FLC especiallyfor MPPT in PV system application. The integration of fuzzy logicand HNN and FLC is described in the following subsections.
4.1. MPPT controller of PV systems using FLC
Fuzzy logic is applied as the MPPT algorithm to the controllerin which the input variables are the change in PV module power(�Pk
pv) and change in duty cycle of the DC DC boost converter (�Dk)whereas the output variable is the change in duty cycle that mustbe applied to control the boost converter (�Dk+1
ref). The formulation
for �Pkpv and �Dk can be expressed as follows:
Pkpv = Vk
pv · Ikpv (9)
�Pkpv = Pk
pv − Pk−1pv (10)
�Dk = Dk − Dk−1 (11)
where Pkpv, PV array output power at kth iteration; Vk
pv, PV arrayoutput voltage at kth iteration; Ik
pv, PV array output current at kthiteration; Dk, measured duty cycle to control switch of DC–DC con-verter at kth iteration; Dk
ref, duty cycle that must be applied to
control switch of DC–DC converter at kth iteration.The universe of discourse for the first input variable, �Pk
pv isassigned in terms of its linguistic variable by using seven fuzzy sub-sets which are denoted by negative large (NL), negative medium(NM), negative small (NS), zero (Z), positive small (PS), positivemedium (PM), and positive large (PL). The universe of discourse forthe second input variable, �Dk defines the change in direction ofduty cycle which is classified into three fuzzy sets, namely, negative(N), zero (Z) and positive (P). The output variable, �Dk
refis assigned
in terms of its linguistic variable by using nine fuzzy subsets whichare denoted by negative double large (NLL), negative large (NL), neg-ative medium (NM), negative small (NS), zero (Z), positive small(PS), positive medium (PM), positive large (PL) and positive dou-ble large (PLL). The membership functions for the first inputs andoutput variables are shown in Fig. 6. The fuzzy rules are then gen-
erated as shown in Table 1 with �Pkpv and �Dk as inputs while�Dk
refas the output. This table is also known as fuzzy associative
matrix. The fuzzy inference of the FLC is based on the Mam-dani’s method, which is associated with the max–min composition.

32 S. Subiyanto et al. / Energy and Buildings 51 (2012) 29–38
le (�P
Dc
4
isapfc
TF
Fig. 6. Definitions and membership functions of (a) the 1st input variab
efuzzification is based on the centroid method which is used toompute the crisp output, �Dk
ref.
.2. Integrating HNN and FLC
Despite using expert knowledge in the formulation of thenference rules and the membership functions of FLC, there aretill some difficulties in determining the center of fuzzificationnd range of the fuzzification. To overcome these difficulties, theroposed FLC uses HNN to determine the optimal membership
unctions. To integrate HNN to the FLC, the following procedures areonsidered.able 1uzzy rules for the proposed FLC.
Input-2 (�dk) Input-1 (�Pkpv)
NL NM NS ZE PS PM PL
N PLL PL PM PS NM NL NLLZE NL NM NS ZE PS PM PLP NLL NL NM NS PM PL PLL
pv), (b) the 2nd input variable (�Ipv) and (c) the output variable (�dref).
4.2.1. Defining neurons for the HNNIn the design of the proposed optimal FLC, only membership
functions of �Pkpv and �Dk
refare considered. Defining neurons of
HNN from �Pkpv is described with seven membership functions as
illustrated in Fig. 7. In Fig. 7, the centers of �Pkpv membership func-
tion are x1, x2, x3, x4, x5, x6 and x7. Furthermore, defining neuronsof HNN from �Dk
refis described with nine membership functions
as illustrated in Fig. 8. The centers of �Dkref
membership functionare z1, z2, z3, z4, z5, z6, z7, z8 and z9. Based on the number of centersof �Pk
pv and �Dkref
, the HNN consists of 16 neurons with variablesgiven as; x1 = −SP1; x2 = −SP2; x3 = −SP3; x4 = SP4; x5 = SP5; x6 = SP6;x7 = SP7; z1 = −SD1; z2 = −SD2; z3 = −SD3; z4 = −SD4; z5 = SD5; z6 = SD6;z7 = SD7; z8 = SD8; z9 = SD9. SP1–SP7 are the output values of neurons,N1–N7 (o N1–o N7) while SD1–SD9 are the output values of neurons,N8–N16 (o N8–o N16). For the values of neurons should satisfy thefollowing constraints:
SP4 = SD5 = 0 (12)
S = S (13)
P1 P max leftSP7 = SP max right (14)
0 ≤ SP3 ≤ SP2 ≤ SP1 (15)

S. Subiyanto et al. / Energy and Buildings 51 (2012) 29–38 33
SP3
SP2
SP1 SP7
SP6
SP5
0 x3x2x1 x5 x6 x7
x4
μ kpvP
kpvP
SP4
N from
0
S
S
S
0
0
4
iTg
E
w1
ub(
�
w
K
-1.0
Fig. 7. Defining neurons of HN
≤ SP6 ≤ SP5 ≤ SP7 (16)
D5 = 0 (17)
D1 = SD max left = 0.1 (18)
D9 = SD max right = 0.1 (19)
≤ SD4 ≤ SD3 ≤ SD2 ≤ SD1 (20)
≤ SD6 ≤ SD7 ≤ SD8 ≤ SD9 (21)
.2.2. Defining objective function for the optimization problemThe goal of MPPT is to achieve �Pk
pv = 0 and �Dkref
= 0. By apply-ng the HNN, minimization of the energy function, E is considered.he energy function, E that is in the form of a quadratic equation isiven as:
= E1 + E2 = 12
A(�Pkpv)
2 + 12
B(�Dkref )
2(22)
here A and B are constants (usually in implementation are taken.0, respectively).
From (22), the first part of E, which is E1 only depends on theniverse of �Pk
pv which is the first input of FLC. The �Pkpv is defined
y defuzzification of the universe of �Pkpv using a centroid function
1) which is written as:
Pkpv =
∑7i=1�(�Pk
pv)ixi∑7
�(�Pk )(23)
i=1 pv i
here �(�Pkpv)
iis membership value of xi.
Value of E1 depends only on neurons Ni (i = 1, 2, 3, 4, 5, 6, 7).nowing that the left side of �Pk
pv in the membership function of
SD4
SD3
SD2
SD1
Z5 Z4Z3Z2 Z1
μkrefD
SD5
Fig. 8. Defining neurons of HNN from
1.0
membership functions �Pkpv .
the first input is �(�Pkpv)
i/= 0 for x1, x2, x3, then, solving E1, given
E1 = 12
⎛⎝ 7∑
i=4
7∑j=4
(A�(�Pk
pv)i�(�Pk
pv)j∑i=1
7
∑7j=1�(�Pk
pv)i�(�Pk
pv)j
)o Ni · o Nj
⎞⎠(24)
The second part of E in (22), is related to the output of FLC anddepends only on neurons Ni (i = 8, 9, 10, 11, 12, 13, 14, 15, 16).The �dk
refcan be defined by defuzzification by using the centroid
method and E2 can be obtained as:
E2 = 12
⎛⎝ 16∑
i=8
16∑j=8
(B�(�dk
pv)i�(�dk
pv)j∑16
i=8
∑16j=8�(�dk
pv)i�(�dk
pv)j
)o Ni · o Nj
⎞⎠(25)
where N = 0 for i = 12, j = 12 and �(�dkref
) is the membership valueof zn. Finally, the total energy function, E = E1 + E2 defined in (22)becomes,
E = 12
⎛⎝ 7∑
i=1
7∑j=1
(A�(�Pk
pv)i�(�Ppv)j∑7
i=1
∑7j=1�(�Pk
pv)i�(�Pk
pv)j
)o Ni · o Nj
⎞⎠
⎛ ⎛ ⎞ ⎞
+ 12⎝ 16∑
i=8
16∑j=8
⎝ B�(�Dkref
)i�(�Dk
ref)j∑16
i=8
∑16j=8�(�Dk
ref)i�(�Dk
ref)j
⎠ o Ni · o Nj⎠(26)
SD7
SD6
SD8
SD9
Z6 Z7 Z8 Z9krefD
membership functions �Dkref
.

34 S. Subiyanto et al. / Energy and Buildings 51 (2012) 29–38
l of a
w
i
w
w
5
Le
Fig. 9. MATLAB simulation mode
here o N = 0 for i = 4, 12; j = 4, 12.Comparing (7) with (27), the weight matrix of neurons Ni to Nj
n the HNN is derived and given as:
ij =
⎡⎢⎢⎣
w11 w12 w13 · · · 0w21 w22w31 w32
.0 0 0 wnn
⎤⎥⎥⎦ (27)
here
wij = −A�(�Pk
pv)i�(�Pk
pv)j∑7
i=1
∑7
j=1�(�Pk
pv)i�(�Pk
pv)j
; for i and j = 1, 2, 3, 4, 5, 6, 7
wij = −B�(�Dk
ref)iϕ�(�Dk
ref)j∑16
i=8
∑16
j=8�(�Dk
ref)i�(�k
ref)j
; for i and j = 8, 9, 10, 11, 12, 13, 14, 15, 16
wij = 0; for other(28)
. Simulation model of PV MPPT controller
The PV MPPT controller was modeled using the MAT-AB/Simulink software and the proposed HNN optimized FLC ismbedded in MATLAB/Simulink using the S-function tool. The
PV system with MPPT controller.
source code of the proposed HNN and fuzzy logic algorithm is writ-ten in the C language program. The overall model of the PV MPPTsystem with the controller in MATLAB/Simulink is shown in Fig. 9.
From Fig. 9, the model consists of two external input parame-ter models, PV array subsystem block, controller subsystem block,the proposed boost converter circuit and resistive load. The inputparameters are the Sun irradiation and temperature to feed the PVarray subsystem block. The PV module is then modeled in MAT-LAB/Simulink as a current controlled voltage source (CCVS) whichthe PV module’s calculated (reference) current, Iref acts as the inputwhile actual current, Iarray and voltage, Varray as the outputs. The PVmodule parameters are obtained from the Sanyo HIP-200BA3 PVtechnical datasheet.
The controller block has 2 inputs, namely, the PV voltage and PVcurrent. The output of the block is the PWM signal used to triggerthe IGBT of the boost converter and reference current, Iref as inputsof the PV module so that the PV module produces a new voltage,based on the reference current, Iref, Sun irradiation and tempera-ture. The MPPT algorithm determines the optimum duty cycle fordeveloping PWM square wave signal. The PWM signal controls thecurrent drawn from the PV panel by the boost converter in order
to reach the MPP current, IMPP which is also called reference thecurrent, Iref. Thus, the reference current, Iref is the PV module cur-rent at the MPP (IMPP) which is related to the MPP voltage (VMPP).These current and voltage values are located at the MPP of the PV
S. Subiyanto et al. / Energy and Buildings 51 (2012) 29–38 35
for tes
cmR
R
Ho
vi
6
oDF
Fv
Fig. 10. Experimental setup
haracteristic curves.The boost converter was designed to produceaximum voltage at 900 V with rating 3 kW. The resistive load,
Load is determined by:
Load (min) = V2O
PO(29)
ence, considering the above assuming and formulation the valuef load resistance RLoad is 270 �.
In the simulations, first the characteristics of the PV module isalidated and then the effectiveness of the HNN optimized FLC isnvestigated.
. Hardware implementation of the PV MPPT controller
The hardware prototype of the PV MPPT controller was devel-ped with the proposed algorithm implemented using the dSPACES1104 controller. The S-function tool with the HNN optimizedLC source code was downloaded in the DS1104 board by using
0 50 100 150 2000
200
400
600
800
1000
1200
MPP by HFLC
Theoretical MPP
PV Array Voltage (V)
PV
Arr
ay P
ow
er (
W)
G = 800W/m2
G = 1000W/m2
G = 200W/m2
G = 400W/m2
G = 600W/m2
(a)
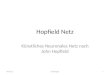
ig. 11. Results of tracking the MPP of PV array using the HNN optimized FLC algorithmarious temperatures at constant irradiation G = 1000 W/m2.
ting the PV MPPT controller.
the dSpace software. The MPPT controller was tested using the lab-oratory based experimental setup as shown in Fig. 10. From thefigure, the experimental setup consists of the 1 kW Agilent E4360APV Solar Array Simulator (SAS), IGBT driver circuit, boost converter,voltage sensor circuit, current sensor circuit, inverter, resistive loadbank and personal computer with the dSPACE DS1104 board con-troller. Four input parameters are needed for establishing the PVcharacteristic curve in the SAS, namely, the open circuit voltage,Voc; short circuit current, Isc; maximum power current, Imp; andmaximum power voltage, Vmp.
7. Test results
To investigate the performance and effectiveness of the HNNoptimized FLC, it is tested on the hardware prototype of the PVMPPT controller and on a complete simulation model of a PV systemdeveloped in the MATLAB/Simulink software.
0 50 100 150 2000
200
400
600
800
1000
1200 MPP by HFLC
TheoreticalMPP
PV Array Voltage (V)
PV
Arr
ay P
ow
er (
W)
T = 25 Co
T = 50 Co
T = 75 Co
T = 0 Co
(b)
for (a) under various irradiation at constant temperature T = 25 ◦C and (b) under

36 S. Subiyanto et al. / Energy and Buildings 51 (2012) 29–38
0.99 1 1.01 1.02 1.03 1.04800
850
900
950
1000
1050
1100
1150
1200
1250
1300
Time (s)
PV
arr
ay p
ow
er(W
)
MPPT byP&OMPPT byFLCMPPT by HFLC
7
Hrcpttsc
Ft
i
F
0.99 0.995 1 1.005 1.01 1.015 1.02 1.0251110
1120
1130
1140
1150
1160
1170
1180
1190
1200
1210
Time(s)
PV
arr
ay p
ow
er(W
)
MPPT by HFLCMPPT by FLCMPPT by P&O
temperature. From Fig. 13, it is noted that for a sudden tempera-
Fig. 12. PV output powers under drastic irradiation change.
.1. Simulation results
The performance of the MPPT controller using the proposedNN optimized FLC is first investigated under simulation envi-
onment. Fig. 11(a) and (b) shows the performance of the MPPTontroller using the HNN optimized FLC in finding the maximumower point (MPP) of the PV system under varying irradiation andemperature, respectively. From the figures, the MPP obtained byhe HNN optimized FLC is compared with the theoretical MPP. Theimulation results of the MPP clearly show that both MPPs are verylose to each other.
To further demonstrate the performance of the HNN optimizedLC, simulations were performed under the following test condi-ions:
i. Constant temperature at 25 ◦C and changing solar radiation.ii. Constant solar radiation at 1000 W/m2 and changing tempera-
ture.ii. Constant temperature at 25 ◦C and considering partial shading.
0.998 1 1.002 1.004 1.006 1.008 1.01 1.012 1.0141185
1190
1195
1200
1205
Time (s)
PV
arr
ay p
ow
er(W
)
1 1.005 1.011187.5
1188
1188.5
1189
1189.5Enlarged section
P&OFLCHFLC
ig. 13. PV output power under sudden temperature change from 25 ◦C to 30 ◦C.
Fig. 14. PV output power under partial shading with of solar irradiation change1000–950 W/m2.
7.1.1. Effect of changing the solar radiationTo analyze the effect of solar radiation, simulations were carried
out under various solar irradiations but at constant temperature of25 ◦C. Fig. 12 shows the response of the MPPT controller in termsof PV output power when subjected to a sudden change in solarirradiation. From the figure, it can be seen that the HNN optimizedFLC (HFLC) gives greater PV output powers compared to the FLCand P&O based MPPT methods. Furthermore, the MPPT controlledby the HFLC gives a fast response to reach the new MPP during solarirradiation changes.
7.1.2. Effect of changing in temperatureSimulations were also carried out to illustrate the performance
of the MPPT methods when subjected to changing temperaturesbut under constant solar irradiation of 1000 W/m2. Fig. 13 showsthe corresponding PV output powers during a sudden change in
ture change, the MPPT controlled by the HFLC gives the highest PVoutput power especially at the transient state.
0.25 0.3 0.35 0.4 0.45 0.5250
300
350
400
450
500
550
600
Time (s)
PV
arr
ay p
ow
er (
W)
MPPT by P&OMPPT by FLCMPPT by HFLC
Fig. 15. PV output power under partial change of irradiation 400–1000 W/m2.

S. Subiyanto et al. / Energy and Buildings 51 (2012) 29–38 37
: (a) M
7
tsPtsopc4rf
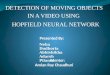
Fig. 16. Experimental result of MPPT at small power of the Agilent SAS
.1.3. Effect of partially shaded solar irradiationSimulations were performed to illustrate the effectiveness of
he MPPT controller of PV systems when subjected to partiallyhaded solar irradiation. In this case, it is assumed that half of theV array receives solar irradiation which changes from 1000 W/m2
o 950 W/m2. The power harvested from the PV array for this case ishown in Fig. 14. From Fig. 14, it can be seen that the performancef the MPPT controlled by HFLC is the best among the other com-ared methods as it gives the highest PV output power. An another
ase that describes a situation of solar irradiation changed from00 W/m2 to 1000 W/m2, to a half of PV array, while the other halfeceiving constant 400 W/m2 under shading. The power harvestingrom PV array related to this case is shown in Fig. 15. From Fig. 15,Fig. 17. Experimental result of MPPT at high power of the Agilent S
PP and V–I curve at channel 1 and (b) MPP and V–I curve at channel 2.
it can be noted that FLC and P&O failed to find MPP correctly. How-ever, the proposed HFLC method successfully finds the MPP around590 W.
7.2. Experimental results
To assess the performance of the prototype MPPT controllerusing the Hopfield optimized FLC, it was tested using the AgilentPV SAS consisting of two array PV simulators, namely, channel 1
and channel 2 which can be connected in either series or parallel.The experimental results are investigated in terms of current andvoltage produced by the PV simulator. Fig. 16(a) and (b) shows thesimulator voltage–current (V–I) curve and the PV maximum powerAS: (a) Agilent SAS channel 1 and (b) Agilent SAS channel 2.

3 and B
pFac2actdtt
wtthc1acT4pAtpta
8
PaotatuuccTc
R
[
[
[
[
[
[
[
[
[
[
[
[
8 S. Subiyanto et al. / Energy
oint (MPP) captured for channel 1 and channel 2, respectively.rom the figures, it can be seen that theoretical MPP is at 25.00 Vnd 1.08 A. The results of the MPP and V–I curve of the PV arrayhannel 1 as shown in Fig. 16(a) indicate that the MPP is at voltage,5.0616 V and current, 1.0758 A. However, the results of the MPPnd V–I curve of the PV array channel 2 as shown in Fig. 16(b) indi-ate that the MPP is at voltage, 25.1585 V and current, 1.0706 A. Ashe MPP experimental results are close to the theoretical MPP withifferences in voltage and current of 0.096 V and 0.0052 A, respec-ively, the prototype MPPT controller using the HFCL is consideredo give accurate MPPT of PV systems.
To verify further the prototype MPPT controller, it was testedith higher power from the PV simulator. The maximum power
hat can be drawn from the PV simulator is 1.2 kW. Fig. 17 depictshe MPP and voltage–current curves captured from the simulator atigher power. The results of the MPP and V–I curve of the PV arrayhannel 1 as shown in Fig. 17(a) indicate that the MPP is at voltage,05.9488 V and current, 3.9708 A. However, the results of the MPPnd V–I curve of the PV array channel 2 as shown in Fig. 17(b) indi-ate that the MPP is at voltage, 105.9790 V and current, 3.9701 A.hus, the channel 1 and channel 2 powers are 420.7015 W and20.7472 W, respectively, with a total power of 841.45 W. The totalower based on the voltage and current of the theoretical MPP ofgilent SAS for combined channel 1 and channel 2 is 848.64 W. As
he MPP experimental results are close to the theoretical MPP, therototype controller is considered to function well at power closeo 848.64 W. The slight difference in the MPP results at channel 1nd channel 2 may be due to oscillation around the MPP.
. Conclusion
A new method based on the Hopfield optimized FLC for MPPT ofV energy harvesting system has been developed. In this method,n improvement is made by applying HNN to find the optimal widthf each fuzzification input and output of the FLC. A complete PV sys-em with HFLC MPPT controller was modeled in MATLAB/Simulinknd a hardware prototype of the MPPT controller was also builto validate the performance of the proposed MPPT method. Sim-lation and experimental results show that the MPPT controllersing the Hopfield optimized FLC method is robust and accurateompared to the other conventional MPPT methods and that it suc-essfully tracks the global maximum power point of a PV module.his system can be applied in the building integrated PV or gridonnected PV systems.
eferences
[1] F. Blaabjerg, Z. Chen, R. Teodorescu, Renewable energy systems in the powerelectronics curriculum, in: IEEE Workshop Power Electronics Education, June16–17, 2006, pp. 58–68.
[
[
uildings 51 (2012) 29–38
[2] T. Khatib, A. Mohamed, K. Sopian, Optimization of a PV/wind micro-gridfor rural housing electrification using a hybrid iterative/genetic algorithm:case study of Kuala Terengganu, Malaysia, Energy and Buildings 47 (2011)321–331.
[3] G.C. Bakos, M. Soursos, Technical feasibility and economic viability of a grid-connected PV installation for low cost electricity production, Energy andBuildings 34 (2002) 753–758.
[4] T.Y.Y. Fung, H. Yang, Study on thermal performance of semi-transparentbuilding-integrated photovoltaic glazings, Energy and Buildings 40 (2008)341–350.
[5] T. Esram, P.L. Chapman, Comparison of photovoltaic array maximum powerpoint tracking techniques, IEEE Transactions on Energy Conversion 22 (June)(2007) 439–449.
[6] F. Dinc er, M.E. Meral, Critical factors that affecting efficiency of solar cells, SmartGrid and Renewable Energy 1 (2010) 47–50.
[7] A. Moreno, J. Julve, S. Silvestre, L. Castaner, A fuzzy logic controller forstand alone PV systems, in: IEEE Photovoltaic Specialists Conference, 15–22September, 2000, pp. 1618–1621.
[8] N.S. D’Souza, L.A.C. Lopes, X.J. Liu, An intelligent maximum power point trackerusing peak current control, in: IEEE 36th Annual IEEE Power Electronics Spe-cialists Conference, PESC’05, 16 June, 2005, p. 172.
[9] S. Lalounia, D. Rekiouaa, T. Rekiouaa, E. Matagneb, Fuzzy logic control of stand-alone photovoltaic system with battery storage, Journal of Power Sources 193(April) (2009) 899–907.
10] N. Patcharaprakiti, S. Premrudeepreechacharn, Maximum power point trackingusing adaptive fuzzy logic control for grid-connected photovoltaic sys-tem, in: IEEE Power Engineering Society Winter Meeting, vol. 1, 2002, pp.372–377.
11] F. Calvino, M.L. Gennusa, G. Rizzo, G. Scaccianoce, The control of indoor ther-mal comfort conditions:introducing a fuzzy adaptive controller, Energy andBuildings 36 (2004) 97–102.
12] A. Messai, A. Mellit, A. Guessoum, S.A. Kalogirou, Maximum power point track-ing using a GA optimized fuzzy logic controller and its FPGA implementation,Solar Energy 85 (February) (2011) 265–277.
13] N. Khaehintung, A. Kunakorn, P. Sirisuk, A novel fuzzy logic control techniquetuned by particle swarm optimization for maximum power point tracking fora photovoltaic system using a current-mode boost converter with bifurcationcontrol, International Journal of Control, Automation and Systems 8 (2010)289–300.
14] J.J. Hopfield, D.W. Tank, “Neural” computation of decisions in optimizationproblems, Biological Cybernetics 52 (1985) 141–152.
15] D.W. Tank, J.J. Hopfield, Simple “neural” optimization networks: an A/Dconverter, signal decision circuit, and a linear programming circuit, IEEE Trans-actions on Circuit and Systems CAS-33 (May) (1986) 533–541.
16] G. Joya, M.A. Atencia, F. Sandoval, Hopfield neural networks for opti-mization: study of the different dynamics, Neurocomputing 43 (2002)219–237.
17] V. Quaschning, Renewable Energy and Climate Change, 1st ed., John Wiley &Sons, Ltd., Chichester, West Sussex, United Kingdom, 2010.
18] F. Kininger, Photovoltaic Systems Technology, 1st ed., Universität Kassel, Wil-helmshöher Alle 73, 34121 Kassel, Germany, 2003.
19] V. Salas, E. Olııas, A. Barrado, A.L. zaro, Review of the maximum power pointtracking algorithms for stand-alone photovoltaic systems, Solar Energy Mate-rials & Solar Cells 90 (January) (2006) 1555–1578.
20] M.S.A. Cheikh, C. Larbes, G.F.T. Kebir, A. Zerguerras, Maximum power pointtracking using a fuzzy logic control scheme, Revue des Energies Renouvelables10 (2007) 387–395.
21] G. Chen, T.T. Pham, Introduction to Fuzzy Sets, Fuzzy Logic, and Fuzzy ControlSystems, 1st ed., CRC Press LLC, Florida, 2001.
22] J.J. Hopfield, Neural networks and physical systems with emergent collectivecomputational abilities, Proceedings of the National Academy of Science of theUnited States of America 79 (April) (1982) 2554–2558.
23] S. Haykin, Neural Networks: A Comprehensive Foundation, 9th ed., PearsonEducation, Singapore, 2005.