Embed Size (px)
Citation preview
In the November ‘10 SERVO, Editor Bryan Bergeronchallenged readers to find economically feasiblesolutions for making home vacuuming robots moreintelligent. Current systems generally perform theirwork by randomly roaming around the room,hoping to accidentally encounter bits of litter. One
of Bryan’s goals was to have a system that could detectaccidents (such as spilled popcorn) and immediately moveto the affected region to clean the area quickly andefficiently.
There are many aspects of a vacuum application thathave to be solved before one can actually be built. First,some form of sensor is needed that can detect debris onthe floor and pinpoint the room coordinates of its location.The first thing that comes to mind is a ceiling mounted webcam, but even fragments the size of popcorn could be hardto detect with a standard camera. Finding an appropriatesensor might require thinking out of the box. Perhaps sometypes of litter could be more easily detected with an IR orUV camera and it is not inconceivable that someone mightcome up with a totally new approach.
Even if a suitable sensor can be found or devised, thereare other problems that must be considered. Once therobot knows where the dirt is, it must still navigate throughthe room to the desired destination while avoiding objectsencountered along the way. The robot must also be able todetermine when its battery is low and find its way to acharging station. Of course, people in the room should beavoided and changes in the placement of furniture should
not affect the robot’s performance.Developing an appropriate sensor technology could be
expensive, so it might be comforting to know that thenavigation problems were solvable before committingresources to developing the sensor technology.Corporations use simulation software to deal with this typeof situation all the time.
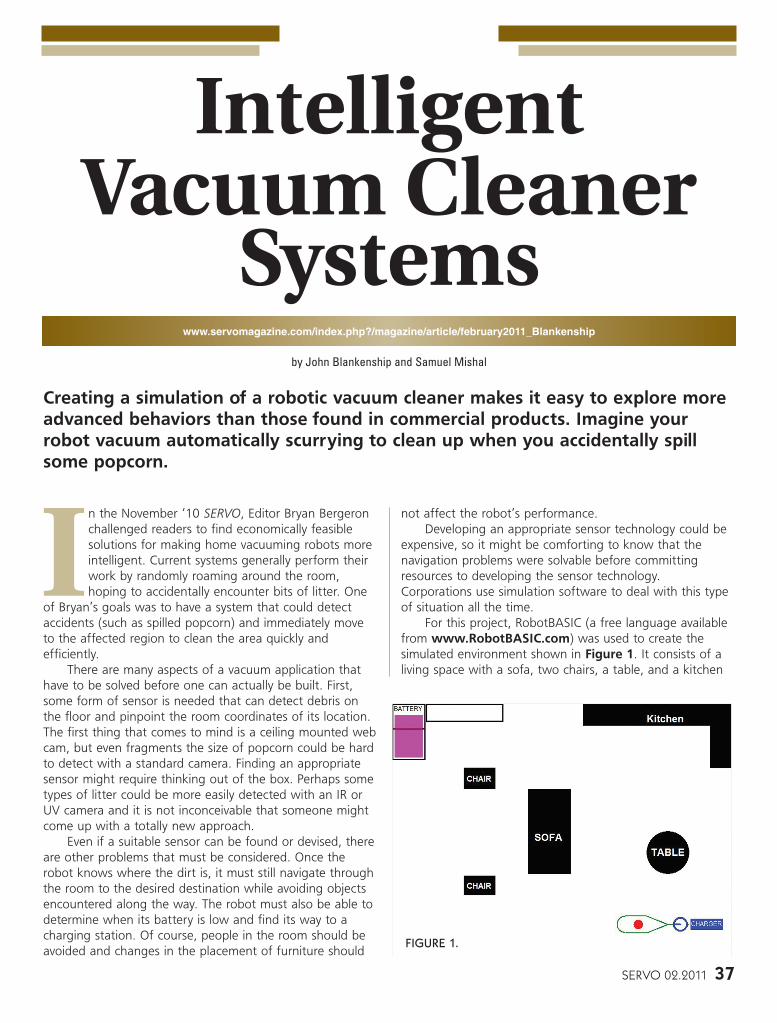
For this project, RobotBASIC (a free language availablefrom www.RobotBASIC.com) was used to create thesimulated environment shown in Figure 1. It consists of aliving space with a sofa, two chairs, a table, and a kitchen
Creating a simulation of a robotic vacuum cleaner makes it easy to explore moreadvanced behaviors than those found in commercial products. Imagine yourrobot vacuum automatically scurrying to clean up when you accidentally spillsome popcorn.
IntelligentVacuum Cleaner
Systemsby John Blankenship and Samuel Mishal
FIGURE 1.
SERVO 02.2011 37
www.servomagazine.com/index.php?/magazine/article/february2011_Blankenship
Blankenship - Vacuum Cleaner Systems.qxd 1/4/2011 9:52 AM Page 37
38 SERVO 02.2011
area. A meter in the upper-left corner displays the status ofthe robot’s battery. The robot’s charging station is locatedin the lower right corner of the figure. It is assumed thatthe robot must back into the charger in order to make therequired electrical connections.
Our vision of the robot’s behavior was straightforward.Normally, the robot should roam randomly throughout theroom, hoping to vacuum the entire floor through accidentalencounters. Periodically, the robot should acquire a pictureof the room through a ceiling mounted camera. AlthoughRobotBASIC does have commands for acquiring picturesfrom a web cam, this action was simulated by capturing thescreen with commands designed for that purpose.
Once an image of the environment is obtained, therobot should search it for ‘dirt.’ If some is found, the robotshould navigate to that area of the room and clean thatarea with appropriate movements. While all this ishappening, the robot should monitor its internal battery. Ifthe charge becomes low, the robot should temporarilyabandon its current behavior and make its way to thecharger. These actions of the robot may sound simple, butthe details of carrying them out can be complex, asdescribed below:
• How does the robot analyze the image of the roomto find the dirt?
• Once dirt is located, how does the robot determinehow to move from its current location to the debris?
• How does the robot find the charger and orient itselfto obtain the charge?
• When the robot is moving to the soiled spot or tothe charger, how does it deal with objects blockingits path?
Let’s examine each of the above situations.
Locating the DirtSince our simulation assumes a sensor exists to detect
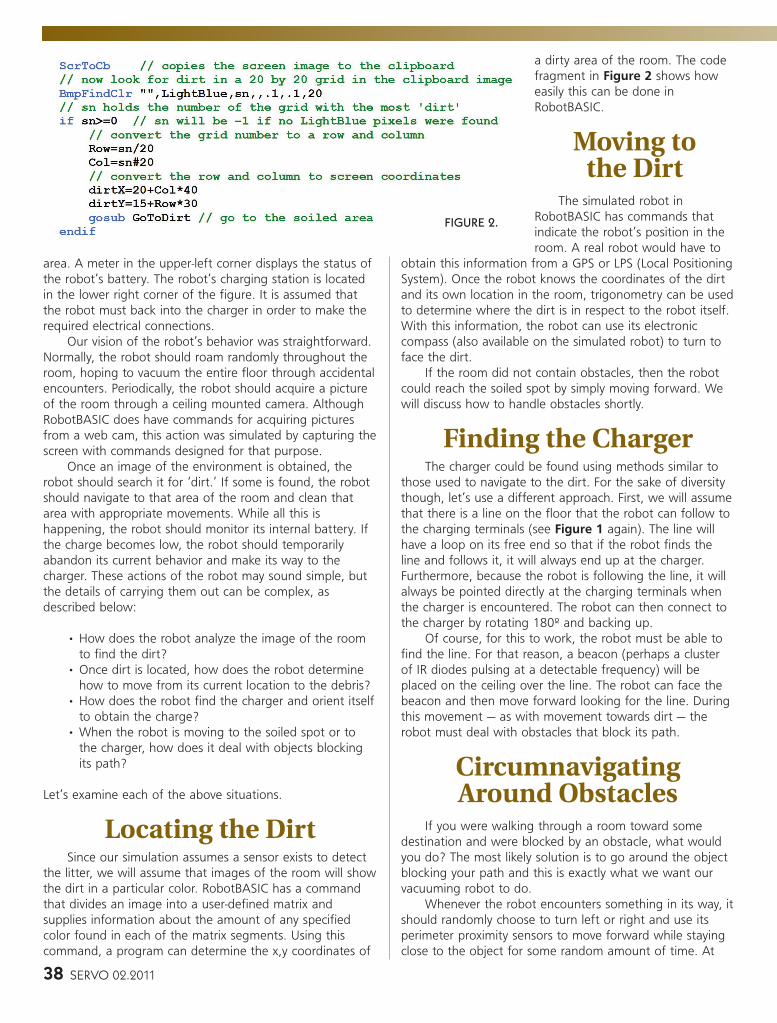
the litter, we will assume that images of the room will showthe dirt in a particular color. RobotBASIC has a commandthat divides an image into a user-defined matrix andsupplies information about the amount of any specifiedcolor found in each of the matrix segments. Using thiscommand, a program can determine the x,y coordinates of
a dirty area of the room. The codefragment in Figure 2 shows howeasily this can be done inRobotBASIC.
Moving to the Dirt
The simulated robot inRobotBASIC has commands thatindicate the robot’s position in theroom. A real robot would have to
obtain this information from a GPS or LPS (Local PositioningSystem). Once the robot knows the coordinates of the dirtand its own location in the room, trigonometry can be usedto determine where the dirt is in respect to the robot itself.With this information, the robot can use its electroniccompass (also available on the simulated robot) to turn toface the dirt.
If the room did not contain obstacles, then the robotcould reach the soiled spot by simply moving forward. Wewill discuss how to handle obstacles shortly.
Finding the ChargerThe charger could be found using methods similar to
those used to navigate to the dirt. For the sake of diversitythough, let’s use a different approach. First, we will assumethat there is a line on the floor that the robot can follow tothe charging terminals (see Figure 1 again). The line willhave a loop on its free end so that if the robot finds theline and follows it, it will always end up at the charger.Furthermore, because the robot is following the line, it willalways be pointed directly at the charging terminals whenthe charger is encountered. The robot can then connect tothe charger by rotating 180º and backing up.
Of course, for this to work, the robot must be able tofind the line. For that reason, a beacon (perhaps a clusterof IR diodes pulsing at a detectable frequency) will beplaced on the ceiling over the line. The robot can face thebeacon and then move forward looking for the line. Duringthis movement — as with movement towards dirt — therobot must deal with obstacles that block its path.
Circumnavigating Around Obstacles
If you were walking through a room toward somedestination and were blocked by an obstacle, what wouldyou do? The most likely solution is to go around the objectblocking your path and this is exactly what we want ourvacuuming robot to do.
Whenever the robot encounters something in its way, itshould randomly choose to turn left or right and use itsperimeter proximity sensors to move forward while stayingclose to the object for some random amount of time. At
FIGURE 2.
Blankenship - Vacuum Cleaner Systems.qxd 12/24/2010 3:11 PM Page 38

that point, the robot simply repeats its actions: face thedesired destination; move forward until blocked by anobject (or until the destination is reached); and (if an objectis encountered) move around the object a random distance.If this sequence of actions is repeated over and over,eventually the robot will arrive at its intended destination.
This obstacle-avoidance behavior will be used when therobot is moving towards dirt or towards the beacon to findthe charger.
Putting It All TogetherSince RobotBASIC’s simulated robot has all the sensors
discussed in this article, it was easy to implement aprogram to test the algorithm described here. The robotbehaves as expected, wandering randomly around the roomunless the ceiling camera spots dirt. When the robot’sbattery runs low, it abandons its current behavior andmakes its way to the charger, follows the line, and backsitself into position. When the charge is complete (as shownon the simulated meter), the robot continues the task thatwas interrupted by the need to recharge.
The program allows the user to use the mouse tosprinkle dirt around the room. There is even an option forletting the robot leave a trail to show where it hasvacuumed. Figure 3 shows how much of the room wasactually covered after the robot spent some time cleaning.
Of course, you may have a totally different idea of howa vacuuming robot should operate. That is the beauty ofsimulations. You can improve on ideas or develop a totallynew approach of your own. And, since RobotBASIC alsohas commands for controlling real robots, you will have ahead start toward building a real vacuuming system.
The fully commented source code for the simulationdescribed here can be downloaded from the APPLICATIONSpage at www.RobotBASIC.com. SV
FIGURE 3.
SERVO 02.2011 39
Blankenship - Vacuum Cleaner Systems.qxd 1/4/2011 9:53 AM Page 39