-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Interactions between Flight Dynamics andPropulsion Systems of
Air-Breathing
Hypersonic VehiclesDefense Presentation
Derek J. Dalle
Chair: James F. DriscollCognate: David J. Singer
Members: Joaquim R. R. A. Martins and Michael A. Bolender
March 21, 2013
Hypersonic Couplings, Defense 1/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Motivation: Use the oxygen from the atmosphereEven at really
high speeds
Compression Expansion
Compressor work
AIR AIR+PRODUCTS(faster)(fast)
Energy added
Air-breathing engine
Combustor
Hypersonic Couplings, Defense 2/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Motivation: Use the oxygen from the atmosphereEven at really
high speeds
Inlet compression
Nozzle expansion
AIR AIR+PRODUCTS(faster)(fast)
Energy added
Air-breathing engine
Combustor
Hypersonic Couplings, Defense 2/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
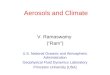
Scramjets could be a transformational technologyOr possibly not.
. .
Flight Mach number, M
Spec
ific
Impu
lse,
I sp [
s]
8,000
7,000
6,000
5,000
4,000
3,000
2,000
1,000
00 2 4 6 8 10
Turbofan
Turbofan with afterburner Ramjet
ScramjetRocket
Theoretical maximumHydrocarbon fuel in air
Theoretical maximumHydrogen fuel in air
Hypersonic Couplings, Defense 3/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Movie of shocks in the inletFrom Mach 6 to Mach 12, zero angle
of attack
Hypersonic Couplings, Defense 4/41
inlet-movie.mp4Media File (video/mp4)
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Vehicle ConceptHighlights of the dynamic components
Exterior compression
Internal compression Internal combustion Expansion
Control surfaces
Hypersonic Couplings, Defense 5/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Vehicle ConceptHighlights of the dynamic components
Exterior compression
Internal compression Internal combustion Expansion
Control surfaces
Diffuser
Internal compressionInternal combustion
Turbine
Expansion
Image credit: Wikimedia Commons user Boeing 757 maya
Hypersonic Couplings, Defense 5/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Example of Tight CouplingAccelerate and maintain level
flight
1. Increase the equivalence ratio 2. More lift from nozzle
3. Lower ; lower drag 4. TE-up elevon deflection
Starting from a steady, level flight condition, we want to
accelerate
The first step is to increase the thrust
This increases the nozzle lift; reduces angle of attack ()
Lower drag due to angle of attack (usually . . . )
Net lower nose-up moment; change elevon setting
Hypersonic Couplings, Defense 6/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Example of Tight CouplingAccelerate and maintain level
flight
1. Increase the equivalence ratio
2. More lift from nozzle
3. Lower ; lower drag 4. TE-up elevon deflection
Starting from a steady, level flight condition, we want to
accelerate
The first step is to increase the thrust
This increases the nozzle lift; reduces angle of attack ()
Lower drag due to angle of attack (usually . . . )
Net lower nose-up moment; change elevon setting
Hypersonic Couplings, Defense 6/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Example of Tight CouplingAccelerate and maintain level
flight
1. Increase the equivalence ratio 2. More lift from nozzle
3. Lower ; lower drag 4. TE-up elevon deflection
Starting from a steady, level flight condition, we want to
accelerate
The first step is to increase the thrust
This increases the nozzle lift; reduces angle of attack ()
Lower drag due to angle of attack (usually . . . )
Net lower nose-up moment; change elevon setting
Hypersonic Couplings, Defense 6/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Example of Tight CouplingAccelerate and maintain level
flight
1. Increase the equivalence ratio 2. More lift from nozzle
3. Lower ; lower drag
4. TE-up elevon deflection
Starting from a steady, level flight condition, we want to
accelerate
The first step is to increase the thrust
This increases the nozzle lift; reduces angle of attack ()
Lower drag due to angle of attack (usually . . . )
Net lower nose-up moment; change elevon setting
Hypersonic Couplings, Defense 6/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Example of Tight CouplingAccelerate and maintain level
flight
1. Increase the equivalence ratio 2. More lift from nozzle
3. Lower ; lower drag 4. TE-up elevon deflection
Starting from a steady, level flight condition, we want to
accelerate
The first step is to increase the thrust
This increases the nozzle lift; reduces angle of attack ()
Lower drag due to angle of attack (usually . . . )
Net lower nose-up moment; change elevon setting
Hypersonic Couplings, Defense 6/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
GOALS
Develop a tip-to-tail vehicle model that can be evaluated in
about asecond (with a single processor)
MASIV: Michigan/AFRL Scramjet In VehicleSAMURI: Supersonic
Aerodynamic Method Using RiemannIinteractionsMASTrim: Michigan/AFRL
Scramjet Trim
Understand ram-to-scram transition and unstart
Collaborate with control design and control evaluation
efforts
Model and describe ascent trajectories
Investigate effects of various design variables
Hypersonic Couplings, Defense 7/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Example SAMURI solutionsA sample inlet solution (temperature in
K)
0 2 4 6 8 10 12 14
3
2
1
0
x [m]
y[m
]
300400
500600700
8009001000
11.5 12 12.5 13 13.5 14
2.6
2.4
2.2
x [m]
y[m
]
300400
500600700
8009001000
Hypersonic Couplings, Defense 8/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
SAMURISupersonic Aerodynamic Method Using Riemann
Interactions
Something needed to solve for supersonic flows . . .
. . . with strong shocks, expansion fans, shock interactions,
etc.
Two diamond airfoils, M = 2, = 0
A
B
C
D
A A
A
D
A
A
C
D
C
D
B = C
shock
wave
expansion fan
slip line / contact discontinuity
Sketch of two interacting waves
Hopefully it will apply to a wide variety of
geometries.Hypersonic Couplings, Defense 9/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
SAMURIcomparison with CFDM = 10, h = 16 km, static temperature
contours
Solution from CFD++
Solution from SAMURI
Hypersonic Couplings, Defense 10/41
-
domain
physical geometry
initial conditions: p, , T, M
-
1
initial direction
-
shock
Mach wave
21
-
21
4
3
expansion fan
shock (continuation)
Mach wave (continuation)
-
21
4
3
5
6
7 shock
shockslip line
expansion fan(continuation)
-
2
4
1
3
5
7
6
89
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Dual-mode combustionMASIV and the ram mode solution method
1.0
2.0
3.0M
ach
num
ber, M
0.0
2 3 4
Hypersonic Couplings, Defense 12/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Dual-mode combustionMASIV and the ram mode solution method
1.0
2.0
3.0M
ach
num
ber, M
0.0
2 3 4
Increase the fuel until M4 = 1
Hypersonic Couplings, Defense 12/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Dual-mode combustionMASIV and the ram mode solution method
1.0
2.0
3.0M
ach
num
ber, M
0.0
2 3 4
Adding more fuel causesthe scram solution to choke.
Hypersonic Couplings, Defense 12/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Dual-mode combustionMASIV and the ram mode solution method
1.0
2.0
3.0M
ach
num
ber, M
0.0
2 3 4
Try a normal shock isolator; M4 < 1
Hypersonic Couplings, Defense 12/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Dual-mode combustionMASIV and the ram mode solution method
1.0
2.0
3.0M
ach
num
ber,
M
0.0
2 3 4
Find correct M3 value such that M4 = 1
Hypersonic Couplings, Defense 12/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Equations of motion at hypersonic speeds
Zero speed: Ball drops.
Orbit!
Hypersoniccase:
more complicated
General nonlinear equations of motion:
x = f(x,u)
State variables:
x = [ L h V P Q R ]T
Control variables:
u = [ ER CE DE CR ]T
Trim:Now I want to pick some of the states () and all of
thederivatives (x), and I want to use the controls and theremaining
states () to satisfy the equations of motion.
Example: Fix h, V , and =. Now find , ER, and CEto trim the
vehicle.
Hypersonic Couplings, Defense 13/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Fuel consumption map, a = 0 m/s2Higher dynamic pressure is
always better?
Flight Mach number, M7 8 9 10 11 12
26
28
30
32
34
36
5 kg/s
4 kg/s
6 kg/s
m f =
7 kg/s
.minim
um fuel
consum
ption
Alti
tude
, h [
km]
q = 100 k
Pa
q = 50 k
Pa
Hypersonic Couplings, Defense 14/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Fuel comsumption map, a = 1 m/s2Higher dynamic pressure is
always better?
11
Flight Mach number, M
Alti
tude
, h [k
m]
7 8 9 10 11 12
26
28
30
32
34
36
mf = 8 kg/s
.
5 kg/s
6 kg/s
7 kg/s
minimum fu
el consumpt
ion
q = 100 k
Pa
q = 50 k
Pa
Hypersonic Couplings, Defense 14/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Why did this happen?That is, dynamic pressure and the engine
Well, first the lift is approximately independent of the dynamic
pressure,
L = qSCL (1)
and so higher dynamic pressure means lower lift coefficient.
This almostalways results in less drag.
D = qSCD qSCD0 +KL2
qS(2)
For steady, level flight, this is also the thrust
(approximately).
CT (ER,M,) =T
qS CD0 +
KL2
q2S2(3)
A very low angle of attack is bad for CT , so there is a best
q.
ma qS(CT CD) (4)
Hypersonic Couplings, Defense 15/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Why did this happen?That is, dynamic pressure and the engine
Well, first the lift is approximately independent of the dynamic
pressure,
L = qSCL (1)
and so higher dynamic pressure means lower lift coefficient.
This almostalways results in less drag.
D = qSCD qSCD0 +KL2
qS(2)
High acceleration favors higher dynamic pressures
CT (ER,M,) =T
qS CD0 +
KL2
q2S2+
maq2S2
(3)
But acceleration is like thrust minus drag.
ma qS(CT CD) (4)
Hypersonic Couplings, Defense 15/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Ram-to-Scram Transition
1.0
2.0
3.0M
ach
num
ber, M
0.0
2 3 4
Hypersonic Couplings, Defense 16/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Ram-scram transition on the flight corridor mapEffect of
acceleration
4.5 5.0 5.5 6.0 6.5 7.018
20
22
24
26
28
Flight Mach number, M
Alti
tude
, h [k
m]
q = 100 k
Pa90 kP
a80 kPa
70 kPa
60 kPaq
= 50 kP
a
a =
0 m
/s2
2 m/s
2
a = 6
m/s2
4 m/s
2
Hypersonic Couplings, Defense 17/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Ram-scram transition on the flight corridor mapEffect of
acceleration
4.5 5.0 5.5 6.0 6.5 7.018
20
22
24
26
28
Flight Mach number, M
Alti
tude
, h [k
m]
q = 100 k
Pa90 kP
a80 kPa
70 kPa
60 kPaq
= 50 kP
a
a =
0 m
/s2
2 m/s
2
a = 6
m/s2
4 m/s
2
This has the same explanationas the fuel consumption maps.
Reason for positive slope:Lower dynamic pressure Higher CL More
dragLower slopes at higheraccelerations:Higher acceleration Thrust
greater than drag Greater effect of q
ma qA(CT CD)
Hypersonic Couplings, Defense 17/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Comparison to experiment
Experimental data from Fotia and Driscoll1
900 1000 1100 1200 1300 14000.0
0.1
0.2
0.3
0.4
0.5
Isolator stagnation temperature, T02 [K]
Equi
vale
nce
ratio
, ER
scram mode
ram mode
ram mode measuredscram mode measured
normal sh
ock limit
scram limit
ram limit
overfueling instability region
Comparison between experimentaldata and MASIV predictions.
Soliddots are measured ram cases.
Experimental geometry
nozzle
fuel injection port
constant-area isolator
static pressure taps
combustor
1Fotia, M. L. and Driscoll, J. F., Ram-Scram Transition and
Flame/Shock-Train Interactions in a ModelScramjet Experiment,
Journal of Propulsion and Power , 2012Hypersonic Couplings, Defense
18/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
MASIV results at the jump
10 5 0 5 100.5
1.0
1.5
2.0
2.5
3.0
3.5
Axial coordinate, (x xF ) / H
Mac
h nu
mbe
r, M
scram mode, ER = 0.4487
ram mode, ER = 0.4489
0
2
4
6
8
10
10 5 0 5 10
Axial coordinate, (x xF ) / H
Stat
ic p
ress
ure,
p /p
2
scram mode, ER = 0.4487
ram mode, ER = 0.4489
Sudden jump for very smalldifference in equivalence ratio(as
expected)
Pressures almost identical inthe downstream area
Mach numbers a little different
Big change in acceleration
ram: a = 2.00 m/s2
scram: a = 0.53 m/s2
Why?
Hypersonic Couplings, Defense 19/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Is thrust continuous across ram-scram transition?Lets look at a
control volume before and after transition
2 3 4
Scram case just before transition (M4 = 1+):
2 3 4
Now add a tiny bit more fuel:
Hypersonic Couplings, Defense 20/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Evidence for this interpretation
Heiser and Pratt2 noticed a problem before:
. . . any further increment in [heat addition] unstarts the
engine inlet, and any decrement in[heat addition] causes reversion
to scramjet operation . . .
Experiments at Michigan3 suggest a different picture (with
similarities):
0.0 0.1 0.2 0.3 0.4
0.7
0.8
0.9
1.0
Pressure recovery, (p 3 p2)/p02
Cor
e ar
ea ra
tio, A
3c/A
2
ram mode
scram mode
normal shock limit, M3 = 0.542
observed ram casesfuel off
observed scram
Isolator compression:
p3p2
= 1+M22M2M3
1+ 12 M
22
1+ 12 M23
Separated boundary layer area:
A3cA2
=1
M23
(p2p3
(1+M22)1)
2Heiser, W. H. and Pratt, D. T., Hypersonic Airbreathing
Propulsion, AIAA Ed. Series, Washington, DC, 1994, pp. 358359
3Fotia, M. L. and Driscoll, J. F., Experimental Investigation of
Ram-Scram-mode Transition Mechanics, 18thAIAA/3AF International
Space Planes and Hypersonic Systems and Technologies Conference,
2012, AIAAPaper 2012-5835 Hypersonic Couplings, Defense 21/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Engine UnstartUnstarted is not the same as stopped
Definition of unstart margin: Distance from frontof shock train
to the front of the isolator (normalized)
=LISOLST
LISO= 1 LST
LISO
Weak shock train: > 0
LISO
LISO
LST
2 3 4
Hypersonic Couplings, Defense 22/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Engine UnstartUnstarted is not the same as stopped
Definition of unstart margin: Distance from frontof shock train
to the front of the isolator (normalized)
=LISOLST
LISO= 1 LST
LISO
Stronger shock train: > 0, decreases
LISOLST
2 3 4
LISO
Hypersonic Couplings, Defense 22/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Engine UnstartUnstarted is not the same as stopped
Definition of unstart margin: Distance from frontof shock train
to the front of the isolator (normalized)
=LISOLST
LISO= 1 LST
LISO
Strong shock train: < 0, unstart
LISOLST
2 3 4
LISO
Hypersonic Couplings, Defense 22/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Flight corridor map for steady flight (a = 0 m/s2)Unstart margin
on flight envelope
4.4 4.6 4.8 5.0 5.2 5.4
18
20
22
24
26
Flight Mach number, M
Alti
tude
, h [
km]
q = 50 kPa
60 kPa
70 kPa
80 kPa
90 kPa
100 kPa
unstart
ram scram
= 0.4
= 0.
1
= 0.0 (unstart)
ram-scram transition
0.2
0.3
A
BC
Hypersonic Couplings, Defense 23/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Unstart marginAll q = 100 kPa conditions considered
4.5
0.5
Flight Mach number, M
Uns
tart
mar
gin,
=
1
LST
/LIS
O
5.0 5.5 6.0 6.5
0.2
0.1
0.0
0.1
0.2
0.3
0.4
normal shock limit
a = 0
m/s2
1 m/s
2
2 m/s
2
3 m
/s2
4 m
/s2
5 m/s
2
6 m/s2
unstart line
ram-scram transition
1.0
~~
scram solutions ( = 1)
A
D
B
C
Hypersonic Couplings, Defense 24/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Flight corridor map for varying accelerationThis is how unstart
shows up on the flight envelope
4.518
Alti
tude
, h [
km]
Flight Mach number, M
5.0 5.5 6.0 6.5 7.0
20
22
24
26
28
q = 50 k
Pa 2 m/s
2
a = 4 m
/s2
amax < 0 m/s20 m/s2 < amax < 2 m/s22 m/s2 < amax
< 4 m/s2
60 kPa
70 kPa
A
B
0 m/s
2
q = 100
kPa90 k
Pa80 k
Pa
Hypersonic Couplings, Defense 25/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Framework for improving the design of MAX-1
EX
ISTIN
G K
NO
WL
ED
GE
BA
SE
Pick objective functions Fuel consumption Specific impulse
Stability Constraint
"Co-optimization" Trajectory variables Design variables
Optimization approach Conclusions?
IMPR
OV
ED
KN
OW
LE
DG
E B
ASE
Trajectory optimization Acceleration profile Effects of dynamic
pressure
Optimization General guidelines
Sensitivity analysis Changes to design variables
Measure objectives
Identify most important vars Design Mach number Design Mach
range
Hypersonic Couplings, Defense 26/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Objective functions
If we just pick total fuel mass consumed (mf ), we might get
Alternative 1: Fix the payload mass. . .
Alternative 2: Use a rocket-equivalent specific impulse
V = gIsp lnm1
m1mfIsp =
V2V1g ln(m1/(m1mf ))
This almost eliminates the effect of mass, as we will see.
Hypersonic Couplings, Defense 27/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Center of mass shiftno change in mass
center of volumecenter of mass
center of pressure
Lvehiclexcg
weight
aero forces
Hypersonic Couplings, Defense 28/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Effect of moving the center of gravitySurprise! Moving the
center of gravity forward improves stability
4 2 0 2 45
0
5
Real part [1/s]
Imag
inar
y pa
rt [1
/s] xcg = 0.05
xcg = 0.025
xcg = 0
M = 5
M = 12
M = 9.2
M = 12
Hypersonic Couplings, Defense 29/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
What if I make the vehicle heavier?Well, the angle of attack
increases, and then. . .
0.6 0.5 0.4 0.3 0.2 0.1 05
0
5
Real part [1/s]
Imag
inar
y pa
rt [1
/s]
M = 12
M = 12
M = 5
M = 5
rf = 0.6 ( )
rf = 0.5 ( )
Hypersonic Couplings, Defense 30/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Dihedral angleView of vehicle from front
E
dihedral effectfrom body
Actual head-on view of MAX-1:
Hypersonic Couplings, Defense 31/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Dihedral angleAffects lateral-directional stability and little
else
0.20 0.15 0.10 0.05 05
0
5
Real part [1/s]
Imag
inar
y pa
rt [1
/s]
M = 5
M = 12
M = 12
E = 2.86 ( )
E = 2.86 ( )
E = 5.73 ( )
Hypersonic Couplings, Defense 32/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Performance, selection of design variables, andtakeaways from
the sensitivity analysis
xcg = 0
5 6 7 8 9 10 11 12
0.2
0
0.2
0.4
0.6
0.8
Mach number, M
Ang
le o
f atta
ck,
MAX-1
rf = 0.6
range = 0
rp = 75
Mdesign = 8
Changes in stabilityalmost completelydescribed usingangle of
attack
Fuel consumptionclosely related to
Dihedral angleisolates Dutch-rollmode
Most effective design variables
Design Mach number (Mdesign) and Mach number range (Mrange)
Also important: angle of attack range (range) and inlet
compressionratio (rp)
Hypersonic Couplings, Defense 33/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Trajectory optimization
Flight Mach number, M
Acc
eler
atio
n, a
[m
/s2 ]
7 8 9 10 11 12 130
1
2
3
4
5
mf = 5.0 kg/s.
2.5
7.5
10.0
12.5
15optimum trajectory
initialized with a = 2 m/s2
7 8 9 10 11 12 130.00
0.02
0.04
0.06
0.08
0.10
0.12
Flight Mach number, M
0 m/s2
optimum trajectory
1 m/s2
a = 2 m/s2
3 m/s2
4 m/s2
Exha
ust O
2 m
ass f
ract
ion,
YO
2 ,5
Two rules for (scram-mode) trajectory planning
Accelerate at almost the maximum acceleration
Whichever is lower of these two:Equivalence ratio that causes
scram-to-ram transitionEquivalence ratio that causes all the O2 to
be used
Hypersonic Couplings, Defense 34/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Optimization: contours of fuel efficiencyOriginal, coarse
surrogate (purple points)
Design Mach number, Mdesign
Des
ign
Mac
h w
indo
w w
idth
, Mra
nge
6 7 8 9 10 11 12 130
1
2
3
4
5
6 constraint: Mupper 13
Isp = 750 s
700 s
600 s
500 s
400 s
300 s
constraint: amax > 0
Mupper = 1211
97
Hypersonic Couplings, Defense 35/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Optimization: contours of fuel efficiencyWith additional points
(green) added
Isp = 750 s
700 s
600 s
500 s
400 s
300 sconstraint: Mupper 13
constraint: amax > 0Mupper = 12
119
7Design Mach number, Mdesign
Des
ign
Mac
h w
indo
w w
idth
, Mra
nge
6 7 8 9 10 11 12 130
1
2
3
4
5
6
MAX-1
optimum
Hypersonic Couplings, Defense 35/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Comparsion of MAX-1 to optimized result
MAX-1
Optimized design, Mdesign = 9.5, Mrange = 0
MAX-1
Optimized design, Mdesign = 9.5, Mrange = 0
Hypersonic Couplings, Defense 36/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Artificial neural networksFlamelet table data reduction
00.2
0.40.6
0.81
00.2
0.40.6
0.810
0.2
0.4
0.6
0.8
1
fmeansmix
H2
smix fmean00.2
0.40.6
0.81
00.2
0.40.6
0.81
0.2
0
0.2
0.4
0.6
0.8
1
H2
Concept: Approximate species reaction rates() with a combination
of simple functions.Currently they are interpolated from a
hugetable.
fmean
smix H2
1
2
3st
4
5
6
7
8
9.
Previous work4 has been very closely related.
4Ihme, M., Marsden, A. L., and Pitsch, H., Generation of optimal
artificial neural networks using a patternsearch algorithm:
Application to approximation of chemical systems, Neural
Computation, Vol. 20, No. 2, 2008,pp. 573601 Hypersonic Couplings,
Defense 37/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Improved modeling of the combustor
Hypersonic Couplings, Defense 38/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Generic hypersonic vehicles
1u1H1
2u2H2
1 + d1u1 + du1H1 + dH1
2 + d2u2 + du2H2 + dH2
dm12.
dm21.1
2
dx
1212 + d12
w1
w2
dq2
dq1
i
j3
j1
j2
j4
dm. j3,idm. i,j2
dm. j4,i
dm. j1,i
pTuvw
j2j2
j2
j2
j2
j2
dx x
zy
Hypersonic Couplings, Defense 39/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Conclusions
MASIV and MASTrim models are a significant improvement
forcontrol-oriented hypersonic vehicle modeling
Predictions of unstart and ram-to-scram transition were plotted
onthe Flight Corridor Map
Unstart: too high, too slow, or at too great of an
accelerationRam-to-scram transition: higher Mach number, lower
altitude,decreased acceleration
Strategies for sram-mode ascent trajectory optimizationHigh
dynamic pressure (agrees with convention)Near maximum acceleration,
limited by either thermal choking oravailable oxygen
Effects of changes to vehicle design
14% reduction in fuel consumption for Mach 7 to Mach 13
trajectoryHypersonic Couplings, Defense 40/41
-
HypersonicCouplings
Derek J. Dalle
Introduction
Motivation
Modeling
SAMURI
Ram mode
Fight Dynamics
Ram-Scram
Transition
Jumps
Unstart
Design andOptimization
Objectives
Sensitivities
Trajectories
Cooptimization
Future Work
Conclusions
Acknowledgments
Thank you to my committee!
My parents, who drove in from Iowa
This research was supported by U.S. Air Force ResearchLaboratory
grant FA 8650-07-2-3744 for the Michigan Air ForceResearch
Laboratory Collaborative Center for Control Science.
Special thanks to Sara Spangelo
Thank you for your time and attention!
Hypersonic Couplings, Defense 41/41
IntroductionMotivationModelingSAMURIRam mode
Fight DynamicsRam-ScramTransitionJumps
UnstartDesign and
OptimizationObjectivesSensitivitiesTrajectoriesCooptimization
Future WorkConclusions


























![Hojojutsu [ Samuri and Ninja Art, Rope Tying ]](https://img.pdfslide.net/doc/110x75/54373259219acd9b658b4588/hojojutsu-samuri-and-ninja-art-rope-tying-.jpg)