Embed Size (px)
Citation preview

J Neurosurg Spine 15:472–478, 2011
472 J Neurosurg: Spine / Volume 15 / November 2011
CerviCal reconstruction using cervical pedicle screws (CPSs) offers greater stability as compared with other techniques, and the use of these screws
has increased in recent years.1,2,9 Nonetheless, CPS inser-tion carries the risk of serious complications, such as in-jury to the vertebral artery (VA), spinal cord, and nerve roots.3,12 Fortunately, computer-assisted surgery has been effective in improving CPS insertion accuracy.5,11 During
the previous decade, a preoperative 3D CT–based navi-gation system was the main technique of choice for CPS insertion.17,18 However, the intervertebral anatomical re-lationships while the patient is prone during surgery may not match the preoperative CT data obtained while the patient is supine. This discrepancy has led to navigation errors and prolonged surgical time because of the need for point or surface registration for each vertebra.
Intraoperative, full-rotation, three-dimensional image (O-arm)–based navigation system for cervical pedicle screw insertion
Clinical article
Yoshimoto ishikawa, m.D.,1 tokumi kanemura, m.D.,1 Go YoshiDa, m.D.,1 akiYuki matsumoto, m.D.,1 ZenYa ito, m.D.,2 rYoji tauchi, m.D.,2 akio muramoto, m.D.,2 shuichiro ohno, m.D.,3 anD Yusuke nishimura, m.D.4
1Department of Orthopedic Surgery, Spine Center, Konan Kosei Hospital, Takaya Chou, Konan City; 2Department of Orthopedic Surgery, Nagoya University School of Medicine, Nagoya City; 3Department of Orthopedic Surgery, Aichi Medical University, Nagakute-cho; and 4Department of Neurosurgery, Nagoya University School of Medicine, Nagoya City, Aichi, Japan
Object. The aim of this study was to retrospectively evaluate the reliability and accuracy of cervical pedicle screw (CPS) placement using an intraoperative, full-rotation, 3D image (O-arm)–based navigation system and to assess the advantages and disadvantages of the system.
Methods. The study involved 21 consecutive patients undergoing posterior stabilization surgery of the cervical spine between April and December 2009. The patients, in whom 108 CPSs had been inserted, underwent screw place-ment based on intraoperative 3D imaging and navigation using the O-arm system. Cervical pedicle screw positions were classified into 4 grades, according to pedicle-wall perforations, by using postoperative CT.
Results. Of the 108 CPSs, 96 (88.9%) were classified as Grade 0 (no perforation), 9 (8.3%) as Grade 1 (perfora-tions < 2 mm, CPS exposed, and < 50% of screw diameter outside the pedicle), and 3 (2.8%) as Grade 2 (perforations between ≥ 2 and < 4 mm, CPS breached the pedicle wall, and > 50% of screw diameter outside the pedicle). No screw was classified as Grade 3 (perforation > 4 mm, complete perforation). No neurovascular complications occurred because of CPS placement.
Conclusions. The O-arm offers high-resolution 2D or 3D images, facilitates accurate and safe CPS insertion with high-quality navigation, and provides other substantial benefits for cervical spinal instrumentation. Even with current optimized technology, however, CPS perforation cannot be completely prevented, with 8.3% instances of minor violations, which do not cause significant complications, and 2.8% instances of major pedicle violations, which may cause catastrophic complications. Therefore, a combination of intraoperative 3D image–based navigation with other techniques may result in more accurate CPS placement. (DOI: 10.3171/2011.6.SPINE10809)
keY worDs • cervical pedicle screw • navigation • O-arm • three-dimensional fluoroscopy • cervical spine
Abbreviations used in this paper: CPS = cervical pedicle screw; DSA = destructive spondyloarthropathy caused by hemodialysis; RA = rheumatoid arthritis; VA = vertebral artery.
This article contains some figures that are displayed in color on line but in black and white in the print edition.

J Neurosurg: Spine / Volume 15 / November 2011
O-arm based navigation
473
Intraoperative 3D image–based navigation can re-duce this discrepancy and may provide greater accuracy and safety during CPS insertion.6,8,15,16 For example, the Iso-C3D–based navigation system (Siemens Medical So-lutions) has been described as accurate and effective for intraoperative 3D image–based navigation. We have previ-ously reported on the use and limitations of this navigation system for CPS insertion.7 Similarly, the O-arm (Medtron-ic) is an intraoperative full-rotation, multidimensional im-age system (Fig. 1) with the potential to become a new computer-assisted surgery device that allows CPS inser-tion with intraoperative high-definition 3D navigation (Fig. 2). In addition, the O-arm has a unique form and function as compared with similar systems. Previously, Nottmeier and Young14 documented their navigation experience with intraoperative 3D imaging (O-arm and Iso-C3D) in the up-per cervical spine. To our knowledge, however, no reports on the use of the O-arm for CPS insertion exist. The aim of our study was to retrospectively examine the reliability of CPS placement using O-arm navigation and to elucidate its advantages and disadvantages.
MethodsBetween April and December 2009, we performed
posterior instrumentation of the occipitocervical, cer-vical, and cervicothoracic spine using CPSs in 21 con-secutive patients (108 CPSs) at the Spine Center, Konan Kosei Hospital in Konan, Japan. The sample included 9 men and 12 women, and the mean age at surgery was 67.2 years (range 42–83 years). The procedure was performed for the following cervical disorders: occipitocervical or cervical lesions caused by rheumatoid arthritis (RA) in 10 patients, trauma in 6 patients, spondylotic myelopathy with cervical kyphosis in 2 patients, metastatic vertebral tumor in 2 patients, and destructive spondyloarthropa-thy caused by hemodialysis (DSA) with RA in 1 patient (Table 1). Occipitocervical fixation was performed in 6 patients, and cervical or cervicothoracic fixation was per-formed in the remaining 15. A laminectomy or lamino-
plasty was performed when necessary. A single group of surgeons with sufficient experience in performing poste-rior CPS fixations inserted all 108 CPSs.
Intraoperative, Full-Rotation, 3D Image–Based Navigation System
The O-arm was used with the Medtronic Stealth-Station (Medtronic, Inc.) during CPS insertions (Fig. 2). The O-arm provides 2D fluoroscopic and full 3D recon-structions throughout posterior procedures, automatically transferring these data to the navigation system. In our study, an image of the patient’s spine was obtained within 26 seconds, and a 3D reconstructed image was obtained within 60 seconds. The aforementioned data could be used for navigation immediately without anatomical reg-istration, thus decreasing operation time and avoiding er-rors associated with registration.
The amount of radiation resulting from a single spin ranged between 40 and 125 kV (25–100 mA). In addition, we could obtain p × 10 × 10 × 15 cm3 3D image volume (usually 5–6 cervical vertebra levels) in a single spin.
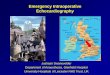
Fig. 2. Intraoperative high-resolution navigation images providing horizontal, sagittal, and pedicle axis views. The virtual guide shows the trajectory of the pedicle screw.
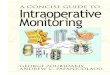
Fig. 1. Photograph showing a patient inside the O-arm system dur-ing the procedure. All moving parts are enclosed in the O-form tube.
TABLE 1: Summary of characteristics in 21 patients who underwent CPS insertion*
Characteristic No.
sex (M/F) 9/12mean age in yrs (range) 67. 2 ± 10.4 (42–83)follow-up in mos (range) 13.1 (9.8–16.9)diagnosis RA 10 trauma 6 CSM 2 DSA + RA 1 metastatic tumor 2
* CSM = cervical spondylotic myelopathy.

Y. Ishikawa et al.
474 J Neurosurg: Spine / Volume 15 / November 2011
Surgical ProcedureGeneral anesthesia was induced, patients were placed
prone on a Jackson table, and a carbon-fiber Mayfield 3-point cranial fixation device was affixed (Fig. 3). As an additional safety precaution, we performed intraoperative spinal cord monitoring for all cervical surgeries. Preop-eratively, the O-arm was wrapped in a plastic drape and prepared for use in all procedures. A posterior approach with a midline incision was performed in all patients, and CPSs were placed before laminoplasty or laminectomy.
After a posterior exposure and correct alignment, the navigation reference frame was attached to the spinous process of a vertebra from C-3 to C-7, and 3D CT data were obtained using the O-arm. After the navigation was ready, an entry point was determined. We reconfirmed the screw trajectory using a navigation probe, inserted a small pedicle probe, and then inserted CPSs in 2 vertebrae above and below the vertebra on which the navigation ref-erence frame had been placed. Vertebrae apart from the reference frame required reconfirmation of the accuracy of navigation. If the navigation error in the vertebrae was > 1 mm, we moved the reference frame to that vertebra, executed another spin of the O-arm, and obtained a re-newed intraoperative 3D image for navigation.
After each CPS was inserted unilaterally, we recon-firmed navigation accuracy by touching the anatomi-cal landmark with the probe to avoid errors. The CPS diameter used in all patients in this study was 3.5 mm. Laminectomy, laminoplasty, or tumor resection was per-formed as necessary. Diameters and lengths of all cervi-cal pedicles into which the screws would be inserted were measured on preoperative 3D CT images. In addition, if a preoperative CT angiography study revealed VA anoma-lies, we did not use CPSs. Instead, we utilized other fixa-tion devices, such as lateral mass screws or lamina hooks, or we performed CPS insertion on only one side to avoid intraoperative neurovascular injury related to severe mal-position of the CPSs.
Postoperative ManagementAll patients who underwent occipitocervical fixation
were immobilized using a halo fixation device. For pa-
tients who underwent short-segmental fixation, we used semi-rigid collars, such as a soft neck collar or a Phila-delphia collar, according to the number of segments fixed and the extent of osteoporosis. Postoperative immobiliza-tion was routinely maintained for 1–3 months.
Accuracy of CPS InsertionThe accuracy of all CPS placements was evaluated
with postoperative CTs in the multiplanar view, as defined by Neo et al.12 Cervical pedicle screw positions were clas-sified into 4 grades: Grade 0, no perforation and the screw was completely contained in the pedicle; Grade 1, perfo-rations < 2 mm (that is, less than half of the screw diam-eter); Grade 2, perforations ≥ 2 but < 4 mm; and Grade 3, perforations ≥ 4 mm (that is, complete perforation).
ResultsThe mean operative time was 219 minutes (range
80–352 minutes), and the mean estimated blood loss was 723 ml (range 186–2500 ml). The mean follow-up pe-riod was 13.1 months (range 9.8–16.9 months), and the average number of instrumented segments was 2.1 (range 1–6 segments). In this study, successful fusion criteria in-cluded the presence of a homogeneous fusion mass at the posterior part of the lamina and lateral mass, including the facet joint, as well as no clear zone around the CPS on CT. The fusion rate of all patients 1 year after surgery was 90.5% (19 of 21 patients). The 2 cases that did not achieve fusion at the 1-year mark were both cases of metastatic tumors in which we had not performed bone grafting. These data are summarized in Table 2.
Clinical ComplicationsThere were no intraoperative or postoperative compli-
cations directly caused by CPS insertion into the cervical pedicles, such as injury to the VA, spinal cord, or nerve root. Thus, no CPSs were removed as a result of neurovas-cular complications during surgery or the follow-up period. Postoperatively, 2 patients showed painful radiculopathy caused by foraminal stenosis at the fixed intervertebral levels. In both of these patients, cervical anterior spondylo-listhesis was almost completely reduced by an intraopera-tive translation maneuver with CPSs. One patient had C-7 radiculopathy and the other had C-8 radiculopathy. Both patients were treated conservatively without CPS replace-ment, and their symptoms improved within 3 weeks. An-other patient had a deep wound infection in the 2nd post-operative week. This case was successfully managed by removing the CPSs with surgical debridement and anterior cervical fixation with a fibular bone graft. In addition, 1 patient with RA underwent treatment for sepsis caused by a bedsore. Two other patients had temporary delirium. Dur-ing the follow-up period, no patient required CPS removal because of complications related to insertion.
Accuracy of CPS PlacementOne hundred eight CPSs were inserted into the cer-
vical pedicles of vertebrae from C-2 to C-7. The number of screws inserted at each level was as follows: C-2, 24; C-3, 15; C-4, 20; C-5, 20; C-6, 19; and C-7, 10. Evalua-
Fig. 3. Photograph showing the carbon-fiber Mayfield 3-point cranial fixation device.

J Neurosurg: Spine / Volume 15 / November 2011
O-arm based navigation
475
tions of the position of the inserted CPSs on postoperative CT scans are featured in Table 2. Of the 108 CPSs, 96 (88.9%) were defined as Grade 0; 9 (8.3%) as Grade 1; 3 (2.8%) as Grade 2; and none as Grade 3.
Illustrative CasesCase 1
This 70-year-old woman with DSA and RA presented with severe progressive myelopathy. Magnetic resonance imaging showed severe spinal cord compression. Com-puted tomography showed a severely destructive interver-tebral change at the C3–4 level, vertical subluxation, and atlantoaxial dislocation. We performed a laminoplasty and occipitocervical fixation using O-arm–based naviga-tion. Cervical pedicle screws were successfully inserted in C-2, C-4, C-5, and C-6. In the postoperative CT evalu-ation, all insertions were classified as Grade 0. Radio-graphic evaluation performed 1 year after surgery dem-onstrated posterior fusion with stable arthrodesis (Fig. 4).
Case 2This 60-year-old woman had a C6–7 dislocation
fracture with severe neck pain without neurological defi-cit. After inducing general anesthesia in the patient, we reduced the dislocation by using the intraoperative 3D
reconstructed O-arm image and successfully performed CPS placement with O-arm navigation (Fig. 5).Case 3
This 80-year-old man had a pathological fracture at C-2 caused by metastatic renal carcinoma. He had severe neck pain and quadriparesis. Occipitocervical fusion was performed with CPSs at C3–5. First, we inserted CPSs into C3–5 on the left side, followed by CPS placement in the contralateral side. On the postprocedural O-arm 3D-reconstructed image obtained intraoperatively, 2 CPSs on the right side showed Grade 2 medial perforations (Fig. 6). We found that the navigation reference frame had slack-ened. Intraoperative spinal cord monitoring revealed that the patient’s neurological status had not deteriorated, and therefore we did not remove the CPSs. No complications related to CPS malposition occurred during the follow-up period. This particular case highlighted the need to care-fully probe each hole, serving as a warning that overconfi-dence in the navigation system can increase the possibility of a serious complication related to CPS insertion.
DiscussionCervical pedicle screws provide significantly greater
stabilization than other fixation devices and stronger pull-out strength than lateral mass screws.1,2,9 Therefore, they can be used for severe deformities of the cervical spine or RA-related cervical spine complications, which require correction of cervical kyphosis or improvement of an un-desirable state of the craniocervical junction.4 Note, how-ever, that severe CPS malposition can cause neurovascu-lar damage, such as injury to the spinal cord, nerve root, or VA.12 Such injury necessitates more accurate CPS posi-tioning by using an improved insertion technique. Abumi et al.,1 who used the conventional technique, reported a perforation rate of 6.7% (45 of 664 screws) and 2 screws among 45 that caused radiculopathy.
Pedicle diameters in the cervical spine are smaller than those in the thoracic or lumbar spine, and there are differences in the intervertebral anatomical relationships between preoperative CT data and intraoperative find-ings.8,16 Thus, intraoperative 3D image–based navigation may be more appropriate for cervical spine procedures. In the present study, in which CPS malpositioning was defined as any screw placement rated Grade 2 or above, the malposition rate was 2.8%. According to the results of this study and others, perforations due to CPS insertion do not necessarily cause clinical complications,12 but a larger CPS perforation can increase the risk of neurovascular in-jury, which in turn can cause catastrophic intraoperative or postoperative complications. Others have reported CPS malposition rates ranging from 2% to 2.8%, as determined with 3D fluoroscopy.6,8 Based on these reported rates, O-arm–based navigation can improve the accuracy of CPS insertion to an extent equal to other 3D fluoroscopy–based navigation systems. Note, however, that the results achieved using 3D image–based navigation would not be complete in preventing CPS malpositioning. Therefore, the combined use of intraoperative 3D image–based naviga-tion with other techniques, such as a funnel technique, may provide more accurate CPS placement.10
TABLE 2: Summary of results in 21 patients who underwent CPS insertion
Parameter No.
operating time in min mean 219 range 80–352blood loss in ml (range) 723 (186–2500)no. of fusion segments mean 2.1 ± 1.91 range 1–6no. of CPSs total 108 at C-2 24 at C-3 15 at C-4 20 at C-5 20 at C-6 19 at C-7 10postop CPS evaluation (%) Grade 0 96 (88.9) Grade 1 9 (8.3) Grade 2 3 (2.8)clinical complications deep wound infection 1 sepsis due to bed sore 1 iatrogenic foraminal stenosis 2 delirium 2

Y. Ishikawa et al.
476 J Neurosurg: Spine / Volume 15 / November 2011
Results of our and other relevant studies together sug-gest that intraoperative 3D image–based navigation can fa-cilitate CPS placement but cannot completely prevent CPS malpositioning. Several possible reasons for the occasional occurrence of CPS malpositioning exist. First, perhaps the CPSs are being forced to the midline by the posterior cervical muscles while instruments, such as awls, probes, taps, and screwdrivers, are being utilized during screw in-sertion. Second, in the CPS insertion techniques applied thus far, the use of a navigation device and system has been limited to determining insertion points and inspecting pre-pared entry points. We have not yet inserted CPSs by us-ing the navigation system throughout the entire procedure given the lack of a suitable navigation device. Third, during surgery, cervical alignment can easily change when force is applied on the cervical spine while creating a hole, in-troducing an awl, or inserting CPSs, and therefore lordosis of the cervical spine increases and the spine rotates. The ensuing discrepancy of alignment between the 3D image and CPS insertion would reduce navigation accuracy, ex-cept on the vertebra with the navigation reference frame. For this reason, the surgical procedure should be carefully monitored to prevent problems related to this discrepancy.
Fourth, human error can also cause a malpositioned CPS. For example, a surgeon can overlook an unstable naviga-tional reference frame or malfunctioning hardware like the navigation system, navigation probe, and so forth. More-over, the surgeon must carefully watch the surgical site and the navigation monitor while using the navigational technique. Ultimately, the limitations of an intraoperative computer system can largely be overcome with increased surgical experience.
The O-arm has some substantial benefits. First, the system can offer higher-resolution intraoperative 3D im-ages as compared with those of other intraoperative 3D fluoroscopy systems. With existing 3D fluoroscopy, it is difficult to obtain images suitable for an intraoperative evaluation of the implant position after spinal instrumen-tation, because the 3D image is of lower quality than the recent multidetector helical CT scans. Note, however, that the 3D images obtained using the O-arm have nearly the same quality as those of recent multidetector helical CT scans. We can therefore determine a clear implant position despite the spinal instrumentation. Second, robotic move-ments allow 2D fluoroscopy views and multiplanar 3D im-ages in any direction (anteroposterior, lateral, and oblique)
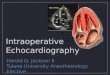
Fig. 4. Case 1. Lateral radiograph (A), CT (B), and MR image (C) showing 3 severe collapses, vertical subluxation, and atlan-toaxial dislocation by DSA + RA (A and B) as well as severe spinal cord compression at multiple levels (C). Lateral radiograph (D) showing occipitocervical fixation performed using O-arm–based navigation and laminoplasty with a hydroxyapatite spacer. Intraoperative 3D image (E), obtained after CPS insertion and postoperative CT (F) showing good CPS placement (Grade 0). Panels E and F are images of almost equal quality.

J Neurosurg: Spine / Volume 15 / November 2011
O-arm based navigation
477
without much effort. Preoperatively, once the O-arm is wrapped in a plastic drape, all moving parts in the gan-try are enclosed, and this system can easily obtain 2D and 3D images as often as necessary while keeping the surgi-
cal site sterile. In this regard, the O-arm has an advantage over existing 3D fluoroscopy, which obtains 3D images by movement of the C-arm throughout the 190° scan over a surgical site. Third, the preparation time for O-arm–based navigation is shorter than for existing 3D fluoroscopy–based navigation systems.13 Furthermore, intraoperative 3D image–based navigation systems do not need point-to-point surface matching, a factor that increases their use for further surgery without landmarks. In addition, the O-arm system requires about 5 minutes to set the reference frame to start CPS insertion, and the cost per patient using O-arm navigation does not change as compared with other popu-lar methods of spinal navigation, such as the Iso-C3D in Japan. Nevertheless, the initial cost of the O-arm is much higher than that of the Iso-C3D. These features could offer more safety and accuracy in surgeries.
Nevertheless, the O-arm has some considerable limitations. The chassis of the O-arm is 823 × 2812 × 1933 mm, requiring additional equipment that occupies a larger space. Moreover, the system requires additional staff for operation. It is also more expensive than other C-arm systems. Furthermore, the O-arm form restricts the intraoperative working space when surgeons use real-time 2D fluoroscopy (Fig. 7). Note that this study is not a comparative study, and therefore the results cannot be interpreted as confirming the validity of the O-arm’s ben-efits over other imaging systems. A comparative study in-cluding other methods of imaging should be conducted in the future. Finally, the use of the O-arm exposes patients to a high dose of radiation. And, according to our knowl-edge, there are no reports on radiation doses during the
Fig. 5. Case 2. Lateral radiograph (A) showing a C6–7 lateral dislo-cation. Postoperative radiograph (B) showing good reduction. Postop-erative CT scans (C and D) demonstrating CPS placements of Grade 0 at C-6 and C-7.
Fig. 6. Case 3. Lateral radiograph (A), CT (B), and MR image (C) showing pathological fractures at C-2 and C4–5, a metastasis from renal carcinoma. Postoperative lateral radiograph (D) showing occipitocervical fixation performed with O-arm–based navi-gation. Postoperative CTs (E and F) obtained at C-4 and C-5, showing Grade 2 CPS insertions on the right side. Intraoperative navigation images (G) obtained before CPS insertion, showing an acceptable trajectory of the pedicle screw (Grade 0).

Y. Ishikawa et al.
478 J Neurosurg: Spine / Volume 15 / November 2011
use of the O-arm. Hence, the radiation dose in this setting should be studied further.
ConclusionsThe use of the O-arm navigational system offers
high-resolution 2D and 3D images and enables clean and accurate CPS insertion. Furthermore, it has other poten-tially substantial benefits for cervical spine instrumenta-tion. Even with current optimized technology, however, CPS perforation cannot be completely prevented. Minor violations (Grade 1, 8.3%), which would not cause sig-nificant complications, as well as major pedicle violations (Grade 2, 2.8%), which can cause catastrophic complica-tions, were observed. Therefore, the combination of in-traoperative 3D image–based navigation and other tech-niques may result in more accurate CPS placement.
Disclosure
The authors report no conflict of interest concerning the mate-rials or methods used in this study or the findings specified in this paper.
Author contributions to the study and manuscript prepara-tion include the following. Conception and design: Kanemura. Ac quisition of data: all authors. Analysis and interpretation of data: Kane mura. Drafting the article: Ishikawa, Kanemura. Critically re vising the article: all authors. Reviewed submitted version of man-uscript: all authors. Approved the final version of the manuscript on behalf of all authors: Ishikawa. Administrative/technical/material support: Kanemura. Study supervision: Kanemura.
References
1. Abumi K, Itoh H, Taneichi H, Kaneda K: Transpedicular screw fixation for traumatic lesions of the middle and lower cervical spine: description of the techniques and preliminary report. J Spinal Disord 7:19–28, 1994
2. Abumi K, Kaneda K: Pedicle screw fixation for nontraumatic lesions of the cervical spine. Spine (Phila Pa 1976) 22:1853–1863, 1997
3. Abumi K, Shono Y, Ito M, Taneichi H, Kotani Y, Kaneda K: Complications of pedicle screw fixation in reconstructive sur-gery of the cervical spine. Spine (Phila Pa 1976) 25:962–969, 2000
4. Abumi K, Takada T, Shono Y, Kaneda K, Fujiya M: Posterior occipitocervical reconstruction using cervical pedicle screws and plate-rod systems. Spine (Phila Pa 1976) 24:1425–1434, 1999
5. Holly LT, Foley KT: Intraoperative spinal navigation. Spine (Phila Pa 1976) 28 (15 Suppl):S54–S61, 2003
6. Hott JS, Deshmukh VR, Klopfenstein JD, Sonntag VK, Dick-man CA, Spetzler RF, et al: Intraoperative Iso-C C-arm navi-gation in craniospinal surgery: the first 60 cases. Neurosur-gery 54:1131–1137, 2004
7. Ishikawa Y, Kanemura T, Yoshida G, Ito Z, Muramoto A, Ohno S: Clinical accuracy of three-dimensional fluoroscopy-based computer-assisted cervical pedicle screw placement: a retrospective comparative study of conventional versus com-puter-assisted cervical pedicle screw placement. Clinical ar-ticle. J Neurosurg Spine 13:606–611, 2010
8. Ito Y, Sugimoto Y, Tomioka M, Hasegawa Y, Nakago K, Ya-gata Y: Clinical accuracy of 3D fluoroscopy-assisted cervical pedicle screw insertion. Clinical article. J Neurosurg Spine 9:450–453, 2008
9. Jones EL, Heller JG, Silcox DH, Hutton WC: Cervical pedicle screws versus lateral mass screws. Anatomic feasibility and biomechanical comparison. Spine (Phila Pa 1976) 22:977–982, 1997
10. Karaikovic EE, Yingsakmongkol W, Gaines RW Jr: Accuracy of cervical pedicle screw placement using the funnel tech-nique. Spine (Phila Pa 1976) 26:2456–2462, 2001
11. Ludwig SC, Kramer DL, Balderston RA, Vaccaro AR, Foley KF, Albert TJ: Placement of pedicle screws in the human ca-daveric cervical spine: comparative accuracy of three tech-niques. Spine (Phila Pa 1976) 25:1655–1667, 2000
12. Neo M, Sakamoto T, Fujibayashi S, Nakamura T: The clinical risk of vertebral artery injury from cervical pedicle screws inserted in degenerative vertebrae. Spine (Phila Pa 1976) 30:2800–2805, 2005
13. Nottmeier EW, Crosby T: Timing of vertebral registration in three-dimensional, fluoroscopy-based, image-guided spinal surgery. J Spinal Disord Tech 22:358–360, 2009
14. Nottmeier EW, Young PM: Image-guided placement of oc-cipitocervical instrumentation using a reference arc attached to the headholder. Neurosurgery 66 (3 Suppl Operative): 138–142, 2010
15. Rajasekaran S, Vidyadhara S, Ramesh P, Shetty AP: Random-ized clinical study to compare the accuracy of navigated and non-navigated thoracic pedicle screws in deformity correction surgeries. Spine (Phila Pa 1976) 32:E56–E64, 2007
16. Rajasekaran S, Vidyadhara S, Shetty AP: Iso-C3D fluorosco-py-based navigation in direct pedicle screw fixation of Hang-man fracture: a case report. J Spinal Disord Tech 20:616–619, 2007
17. Richter M, Cakir B, Schmidt R: Cervical pedicle screws: con-ventional versus computer-assisted placement of cannulated screws. Spine (Phila Pa 1976) 30:2280–2287, 2005
18. Takahashi J, Shono Y, Nakamura I, Hirabayashi H, Kamimura M, Ebara S, et al: Computer-assisted screw insertion for cer-vical disorders in rheumatoid arthritis. Eur Spine J 16:485–494, 2007
Manuscript submitted November 17, 2010.Accepted June 1, 2011.Portions of this work were presented in abstract form as the Pro-
ceedings of the 7th SICOT/SIROT Annual Conference, Gothenburg, Sweden 2010.
Please include this information when citing this paper: pub-lished online July 15, 2011; DOI: 10.3171/2011.6.SPINE10809.
Address correspondence to: Yoshimoto Ishikawa, M.D., Depart-ment of Orthopaedic Surgery, Spine Center, Konan Kosei Hospital, 137 Omatsubara, Takaya Chou, Konan City, 483-8704 Japan. email: [email protected].
Fig. 7. Photograph showing the working space restricted by the O-shaped tube during CPS insertion via real-time 2D fluoroscopy.