Embed Size (px)
Citation preview

RESEARCH ARTICLE
D. G. Liebermann Æ A. Biess Æ C. C. A. M. Gielen
T. Flash
Intrinsic joint kinematic planning. II: Hand-path predictionsbased on a Listing’s plane constraint
Received: 24 October 2004 / Accepted: 5 September 2005 / Published online: 8 December 2005� Springer-Verlag 2005
Abstract This study was aimed at examining theassumption that three-dimensional (3D) hand move-ments follow specific paths that are dictated by theoperation of a Listing’s law constraint at the intrinsicjoint level of the arm. A kinematic model was used tosimulate hand paths during 3D point-to-point move-ments. The model was based on the assumption that theshoulder obeys a 2D Listing’s constraint and that rota-tions are about fixed single-axes. The elbow rotationswere assumed to relate linearly to those of the shoulder.Both joints were assumed to rotate without reversals,and to start and end rotating simultaneously with zeroinitial and final velocities. Model predictions werecompared to experimental observations made on fourright-handed individuals that moved toward virtualobjects in ‘‘extended arm’’, ‘‘radial’’, and ‘‘frontalplane’’ movement types. The results showed that themodel was partially successful in accounting for theobserved behavior. Best hand-path predictions wereobtained for extended arm movements followed by ra-dial ones. Frontal plane movements resulted in thelargest discrepancies between the predicted and the ob-served paths. During such movements, the upper armrotation vectors did not obey Listing’s law and this mayexplain the observed discrepancies. For other movementtypes, small deviations from the predicted paths wereobserved which could be explained by the fact that sin-
gle-axis rotations were not followed even though therotation vectors remained within Listing’s plane. Dy-namic factors associated with movement execution,which were not taken into account in our purely kine-matic approach, could also explain some of these smalldiscrepancies. In conclusion, a kinematic model basedon Listing’s law can describe an intrinsic joint strategyfor the control of arm orientation during pointing andreaching movements, but only in conditions in which themovements closely obey the Listing’s plane assumption.
Keywords Listing’s law Æ Joint kinematics Æ End-pointpath model
Introduction
The present study investigated the principles underlyingthe formation of end-point paths during three-dimen-sional (3D) reaching and pointing movements based onthe assumption that hand trajectories are dictated bylaws of control imposed on the arm at the joint level.
A substantial number of early studies (Morasso 1981;Abend et al. 1982) have argued in favor of the idea thatmulti-joint movements are planned in terms of extrinsichand coordinates. According to these studies, nearlystraight hand paths with bell-shaped tangential velocityprofiles characterize 2D reaching movements. Flash andHogan (1985) developed an optimal control model thatpredicted the kinematic characteristics of such move-ments, and concluded that the resulting trajectories arean expression of the intent to minimize the hand jerk.
However, many of the hand movement studies thatpropose planning in terms of extrinsic coordinates havebeen validated only for relatively simple movementsperformed in the horizontal plane. Few models havebeen developed to explain other, more complex, motionpatterns like drawing scribbles or handwriting. In anearly attempt to describe the planning and control ofsuch curved movement types, Viviani and Terzuolo(1982) suggested the ‘‘two-thirds power law’’. Based on
D. G. Liebermann (&)Department of Physical Therapy,Sackler Faculty of Medicine, Tel-Aviv University,69978 Ramat Aviv, IsraelE-mail: [email protected].: +972-3-6405589Fax: +972-3-6405436
A. Biess Æ T. Flash Æ D. G. LiebermannDepartment of Applied Mathematics and Computer Science,Weizmann Institute of Science, 76100 Rehovot, Israel
C. C. A. M. GielenDepartment of Medical Physics and Biophysics,University of Nijmegen, 6525 EZ Nijmegen, The Netherlands
Exp Brain Res (2006) 171: 155–173DOI 10.1007/s00221-005-0268-7

experimental observations, they found that the angularvelocity at the end-point (A) decreases as a function ofthe increases in the curvature of the path (K) followingthe relationship A � CK2/3, where C is a piecewisevelocity gain factor. C can also be expressed as 1/r (theinverse of the radius of the curvature r). This invariantrelationship between curvature and velocity may be de-fined more practically for the end-point tangentialvelocity (V) as V � CK�1/3.
In an attempt to unify the minimum jerk and the two-thirds power law, Viviani and Flash (1995) proposedthat kinematic planning of curved and straight point-to-point movements obey a common strategy. In bothcases, the assumed goal of the performance is to maxi-mize smoothness at the extrinsic hand level. More re-cently, Richardson and Flash (2002) provided atheoretical basis for the unification of the two theoreticalaccounts, although it has been argued also that the two-thirds power law is an epiphenomenon of some otherprinciples (Todorov and Jordan 1998) such as being abyproduct of the intent to perform smooth joint trajec-tories (Schaal and Sternad 2001).
The suggestion that hand movement control may becarried out by intrinsic level planning is not new. So-echting and Lacquaniti (1981) argued that joint kine-matic planning is used during planar vertical movementsperformed in a sagittal plane, and showed experimen-tally that the shoulder and elbow rotations are linearlyrelated. Atkeson and Hollerbach (1984) confirmed thesame linear relationship between joint velocities duringsimilar movements, and proposed a ‘‘linear joint inter-polation strategy’’ to account for the experimentalobservations. According to this strategy, curved handpaths at the extrinsic level are the result of a constantratio between the angular velocities of the shoulder andelbow joints. Hollerbach and Atkeson (1986) have alsonoticed that these hand paths become straight towardthe boundaries of the workspace, and proposed a‘‘staggered joint interpolation strategy’’ (Hollerbach andAtkeson 1987) to explain such a phenomenon. Theirmodel allows for the onset and offset of the movement inone joint to be delayed with respect to those of anadjacent joint, and consequently, at the extremes of theworkspace the path turns to be straight. Other studieshave provided additional support for joint-level plan-ning (Kaminski and Gentile 1986; Flanagan and Ostry1989). These studies share the assumption that intrinsicjoint kinematics capture major characteristics of thetrajectory planning process. Evidence showing thatintrinsic arm dynamics (and not only intrinsic kine-matics) may determine the extrinsic characteristics of thehand trajectories has also been reported from modelingapproaches that involve the minimization of the rate ofchange of joint torques (Uno et al. 1989) and the mini-mization of the rate of change of the commanded tor-ques (Nakano et al. 1999).
Taken together, these studies advocate that joint-levelplanning may simplify the computational problemsassociated with motion planning in terms of end-point
coordinates. Models based on intrinsic joint-level plan-ning are often considered more realistic since theunderlying assumptions include the notion that the braintakes into account intrinsic limb properties (not only thegeometric characteristics of the end-point path). A ma-jor problem common in this approach is the inversekinematics problem, which does not have a uniquesolution for a kinematically redundant arm moving inthree dimensions. Only few of those models have at-tempted to explain how the system copes with kinematicredundancies.
An attempt to deal with 3D movements has beenmade by Soechting and Terzuolo (1988), who assumedthat a decrease in movement variability during motorexecution is an expression of the level of motion plan-ning that the brain uses in order to generate a move-ment. Their empirical evidence showed that the armjoint trajectories were less variable than the end-pointtrajectories during 3D drawing movements, and inter-preted their results as evidence in support of a planningscheme at the joint level. Soechting et al. (1995) furtherdeveloped an intrinsic model based on the minimizationof peak kinetic energy during pointing to visual targetswith the hand in three dimensions. Their model ac-counted for the deviations of the arm orientation at theend of the movement from postures predicted by Don-ders’ law. However, their model did not make any pre-dictions concerning the expected hand paths.
More recently, Biess et al. (2001) went a step furtherand developed a model that simultaneously predictedarm postures and the corresponding hand paths. Biesset al. (2001) analyzed the geometric predictions of thehand path and the final arm posture using a cost func-tion based on the minimization of the kinetic energy ofthe whole arm. The solution of the optimization prob-lem corresponded to geodesics in the arm configurationspace with respect to a metrics defined by the total ki-netic energy. Comparisons between the experimentalobservations and the model results have suggested that3D joint postures may be influenced by the inertialproperties of the whole arm (Biess et al. 2001). Wang(1998) and Wang and Verriest (1998) presented a modelfor 3D movements as well, but they used a cost functionbased on the minimization of joint discomfort.
Finally, Torres and Zipser (2002) showed that 3Dhand paths and orientations could be closely predictedby applying a gradient descent technique to a costfunction that was based on the distance between aspecified target and the current arm configuration in anabstract configuration space. Torres and Zipser (2002)suggested that path planning based on geometric con-straints is a step that may precede a temporal stageinvolving the specification of time-dependent jointkinematic variables (velocities and/or accelerations).
Listing’s law has long been suggested as an intrinsicconstraint that may be used during 3D eye movements(Westheimer 1957; Collewijn et al. 1988). Tweed andVilis (1987, 1990) found support for the validity ofListing’s law and the single-axis rotation hypothesis
156

from their model predicting eye torsion between sac-cades. Based on similar principles, Straumann et al.(1991) suggested a model for the upper limb rotationsduring extended arm pointing movements. Miller et al.(1992) expanded this approach and studied Listing’s lawduring hand reaching movements of different types.Only few attempts have been made to incorporate suchconstraints on joint rotations with the purpose of pre-dicting the actual hand paths during 3D movements(Gielen et al. 1997).
In this part of the study, we assume the validity ofListing’s law at the shoulder joint level based on theevidence reported in the accompanying manuscript. Thisassumption allows to derive shoulder rotations thatfollow minimal amplitude paths by constraining thejoints to rotate about fixed single-axes (i.e., to followstraight lines in a Listing’s plane representation). Theelbow rotations are assumed to relate linearly to thosedictated by Listing’s law at the shoulder and this, inturn, allows for the prediction of the hand paths. Thismodeling approach is carried out as an attempt to gainadditional insights into the rules used by the brain togovern the extrinsic characteristics of 3D motion.
Theoretical model
Model assumptions
The first main assumption of the present model is thatrotation vectors of the upper arm during pointing andreaching in three dimensions can be described within areasonable margin of error by a 2D surface.
We have reported previously (Liebermann et al. 2005,manuscript I) that even for a random mixture of move-ments the coefficients of curvature and twist (d, e, and f)were relatively low when the rotation vectors were fittedto the equation rx ¼ aþ bry þ crz þ dr2y þ eryrz þ fr2y :These scores were often found to be not different fromzero. We also reported that the thickness of the manifoldrepresenting the upper arm rotations about the shoulderwas relatively small. Therefore, as first-order approxi-mations, mean Listing’s planes were adopted for eachmovement type in order to describe the upper arm seg-ment rotations. The rotation vectors were assumed tofollow straight lines within the assumed planes (i.e., as-sumed to be single-axis rotations). We extracted theprimary position coordinates from the vectors orthogo-nal to these planes, and used them as reference vectorsfor the prediction of the arm rotations based on Listing’slaw.
Our forward modeling approach considers two limbsegments for the prediction of the hand paths duringpointing and reaching movements. Listing’s law for theshoulder does not specify the movement of the forearm.Therefore, in frontal and radial arm movements anadditional assumption made here was that the relation-ship between the elbow joint rotations (flexion–exten-sion) and the shoulder joint rotations is linear. This has
been supported by experimental observations (Marottaet al. 2003), although it may not hold for movementstoward the boundaries of the workspace (Hollerbachand Atkeson 1987).
Further assumptions were made in order to deter-mine objective criteria for the exclusion of some exper-imental trials:
1. The model assumed that hand movements towardvisual targets are pre-planned. Such movementsshould follow a monotonic time-function, and shouldshow a unimodal velocity profile in hand space. Weexcluded movement trials that presented joint rever-sals attributed to feedback corrections.
2. All segments were assumed to move simultaneouslywithout staggering between the different joint rota-tions. By staggering we mean delays at the onset or atthe end of the rotation in one joint with respect to theother joints. Underlying this assumption is the ideathat different moving segments obey common timeconstraints.
3. Movements started and ended with zero velocity.
Based on the assumptions above, the main purpose ofthis work was the comparison between modeled andobserved paths for different types of movement.
The Listing’s law constraint in extended arm movements
Joint rotations in robotic systems are commonly repre-sented in terms of rotation matrices (Craig 1989). Such arepresentation has been adopted to describe joint rota-tions of biological systems in spite of several disadvan-tages. For example, a matrix representation for rotationsinvolves a high computational cost since it requires thecalculation of the three Euler angles. It may also beproblematic in some cases since matrices of rotation arenon-commutative. Consequently, joint rotations in areverse order from a final orientation do not bring thejoint to the original starting orientation.
On the other hand, in a proper vector representationof rotations non-commutativity is not a concern. Such arepresentation is suggested for rotations of the eye in theorbit (Tweed and Vilis 1987), and it is deemed relevantfor describing internal brain processes such as the rep-resentation of the intended direction of the handmovement or the mental rotation of objects (Georgop-oulos et al. 1989). A vector representation is compact,computationally more economical and it allows for asuitable formulation of Donders’ law under the Listing’slaw constraint (Haslwanter 1995). Since a representationin terms of rotation vectors seems justified for describingthe rotations of the arm segments, we proceed to definerotation vectors of the arm.
Rotation vectors, like rotation matrices, can be usedfor the description of the orientation of a rigid object(e.g., the limbs) with respect to a given reference con-figuration. Mathematically a rotation vector is definedas (Hepp 1990; Haslwanter 1995):
157

~rðh; ~nÞ ¼~n � tan h2; j~nj ¼ 1; ð1Þ
where ~n is a unit vector in the direction of the rotationaxis, and h is the rotation angle around this axis mea-sured with respect to a given reference configuration. Itis important to note that the components of the rotationvector depend on the chosen reference position.
The rotation vector of two successive rotations, ~r1and ~r2; is given by (Hepp 1990):
~r2 �~r1 ¼~r1 þ~r2 þ~r2 �~r1
1�~r1 �~r2: ð2Þ
We first focus on extended arm movements with threedegrees of freedom at the shoulder joint, which can bedefined by the elevation, azimuth and torsion angles, oralternatively by a single rotation vector. In this regard,Listing’s law may simplify computations and may allowfor a solution to the inverse kinematic problem. In aredundant system such as the human arm, the jointconstraint given by Listing’s law reduces the number ofjoint degrees of freedom from three to two since thetorsion angle can be obtained from the specific elevationand azimuth angles.
Listing’s law defines a constraint in the rotationvector space describing specific arm postures. It statesthat the rotation vectors with respect to an arbitraryreference position lie within a plane. This strategyimplies that the axis of rotation of the upper armsegment is expected to remain fixed in space during themovement (a single-axis rotation, Hepp 1990). As aconsequence of a single-axis rotation, the upper armsegment in our model is assumed to rotate in a waythat confines the rotation vectors to follow a straightline within Listing’s plane (see ~r(k) in Fig. 1a). Theimplementation of such a strategy might be usefulprimarily ‘‘... for systems that wish to optimize theamplitude of the rotations to and from some centrallylocated primary position, and keep the orientationconstant independent of the path taken’’ (Vilis andTweed 1991, p 96). Therefore, under the flat Listing’splane and the single-axis rotation constraints appliedon the upper arm rotations it is possible to formulate amodel that can predict unique shoulder joint angularpaths.
Path predictions in fully extended arm movements
Initially, all rotations are measured with respect to thezero configuration of the arm, which is the configurationwhere all of the joint angles are equal to zero. For ourchoice of coordinates, the zero configuration corre-sponds to an arm posture of a subject pointing straightforward with a pronated arm while maintaining theupper limb co-aligned with the x-axis of the fixed labo-ratory frame.
For movements with a fully extended arm, the pos-ture of the arm is defined by the hand vector ~p; which
connects the center of shoulder joint with the handlocation (Fig. 1b).
It is assumed here that a pointing movement from aninitial hand location ~pa (corresponding to an arm con-figuration described by the rotation vector ~ra) to a finalhand location ~pb (corresponding to an arm configura-tion described by the rotation vector ~rb) is carried out byrotating the extended arm about the shoulder joint suchthat the rotation vectors follow a straight line from ~ra to~rb within Listing’s plane (Fig. 1a). In fact, the resultinghand movements between pointing targets will be curvedin the extrinsic 3D space because of such a straight-lineconstraint on the joint rotation vectors.
The change in orientation of the arm between theinitial orientation~ra and the final orientation~rb can bedescribed by the following set of rotation vectors:
~rðkÞ ¼~ra þ kð~rb �~raÞ; ð3Þwhere k is an arbitrary real-valued parameter in theinterval [0, 1] that parameterizes the path in rotationvector space, and ~ra; ~rb are elements of Listing’s plane.
It should be mentioned that rotation vectors could beconstrained to a Listing’s plane without following single-axis rotations. That is, rotation vectors within the List-ing’s plane could follow paths other than straight (e.g.,curved paths; see Appendix). In such a case, however,the axis of rotation of the arm would no longer be fixedin space.
A Listing’s plane constraint is a 2D fit to the cloud oftips of the rotation vectors obtained for a segmentduring the movements, and it is referred to as the ‘‘dis-placement surface’’ (Haslwanter 1995). The vectororthogonal to such a displacement plane is called theprimary position vector, which defines the orientation ofListing’s plane. This becomes our new reference vector,which is determined for each subject in each movementtype. The primary position vector is further used for thecalculation of the simulated rotations from point topoint. Therefore, from now on we can refer to the pri-mary position in the rotation vector space as the ‘‘ref-erence position’’.
According to Hepp (1990), the rotation vectors de-scribed by Eq. 1 can also be represented in terms of asingle-axis rotation about the axis ~nab by the amplitudeangle h (as illustrated in Fig. 1b), resulting in a rotationvector of the form:
~rðhÞ ¼~rabðhÞ �~ra; ð4Þwhere ~rabðhÞ ¼~nab � tan ðh=2Þ:
The direction of the fixed axis of rotation is deter-mined by the unit vector:
~nab ¼~rab
j~rabjð5Þ
with the rotation vector
~rab ¼~rb � ð�~raÞ ¼~rb �~ra þ~ra �~rb
1þ~ra � r*b; ð6Þ
158

that brings the arm from the initial position ~ra to thefinal position ~rb:
The identity of the rotation vectors given by Eqs. 3and 4 determines the amplitude angle h in terms of thepath parameter k. After some algebraic transformationswe obtain
hðkÞ ¼ 2 arctankð1þ~ra � r*bÞj~rabj
k~ra � r*b þ ð1� kÞ~r2a þ 1
!; ð7Þ
with the initial and final angles being h(0) = 0 andhð1Þ ¼ 2 arctan ~rabj jð Þ; respectively.
The hand path can be determined from the rotationvector (Eq. 3) according to
~pðkÞ ¼~p0 þ2
1þ~r2ðkÞ f~rðkÞ � ½~p0 þ ð~rðkÞ �~p0Þ�g; ð8Þ
where ~p0 denotes the hand vector with respect to thereference position.
Path predictions for radial and frontal plane armmovements
Unlike movements that are performed with a fully ex-tended arm, the final hand location in radial and frontalplane movements is determined by rotations about theshoulder and elbow joints. In this case, an arm config-
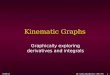
Fig. 1 According to Listing’slaw, three-dimensional jointrotations could be mapped on aflat Listing’s plane. In pointingfrom an initial location ~pa toanother location ~pb; therotation vectors of the initialand final arm configurations aredefined with respect to a specificreference position called theprimary position vector ~rppwhich is orthogonal to Listing’splane. a Rotation vector space:the straight path ~rðkÞ inListing’s plane from ~ra to ~rb: bHand space: the arm pathprojected onto a unit sphere,which results from a single-axisrotation around ~nab by arotation angle h from the initialhand location ~pa to the finalhand location ~pb
159

uration is determined when the rotation vectors of theforearm and upper arm segments are specified. In oursimple model, the forearm adds only one degree offreedom about the radio-humeral joint, which describesthe flexion–extension movement of the forearm withrespect to the upper arm segment.
For radial and frontal movements we assume alsothat the rotation vector of the upper arm segment fol-lows a straight line within Listing’s plane. Such a rota-tion vector of the upper arm is given by:
~ruðkÞ ¼~ra þ kðr*b �~raÞ: ð9Þ
However, an additional rule has to be applied in or-der to determine the rotation vector of the forearm. Weassume that the flexion–extension rotation b of the el-bow joint changes linearly with the amplitude ofshoulder rotation h, leading to the relation
bðhÞ ¼ bf � b0
hf � h0ðh� h0Þ þ b0; ð10Þ
where h0, hf and b0, bf denote the initial and final anglesof b and h, respectively.
An initial support for the linear relation between thesetwo contiguous arm joints (as expressed in [10]) comesfromMarotta et al. (2003). These authors have found thatthe changes in orientation of the upper arm and those ofthe forearm are linearly related during reaching move-ments for grasping pre-oriented objects. These changesclosely followDonders’ law. Also, our own findings in 3Dpointing movements showed that the rotation angle hrepresenting the rotation of the upper arm segment aboutthe fixed axis in space and the actual elbow rotation angleb are linearly related during the transport of the hand tothe visual targets. Earlier evidence suggesting a linearrelationship between the shoulder and the elbow jointswas reported by Soechting and Lacquaniti (1981) foractual orientation angles during radial movements to-ward targets located on a vertical plane and by Holler-bach and Atkeson (1986) during vertical movementscarried out within the sagittal plane.
Under the linear assumption, the rotation vector ofthe forearm with respect to the upper arm segment canbe written as:
~rfu ¼~n � tanbðhÞ2
� �; ð11Þ
where ~n is in the direction of the elbow joint axis in thereference configuration, and b is the flexion angle mea-sured with respect to the extended arm. Note that theflexion angle b can be expressed in terms of theparameter k by inserting Eq. 7 into Eq. 10.
Finally, the rotation vector of the forearm with re-spect to the reference position can be expressed as:
~rf ¼~ru �~rfu: ð12Þ
The elbow and the hand paths are determined by therotation vectors of the forearm and upper arm segments.The elbow path is given by:
~peðkÞ ¼~pe;0 þ2
1þ~r2uðkÞf~ruðkÞ � ½~pe;0 þ ð~ruðkÞ �~pe;0Þ�g;
ð13Þand the hand path is given by:
~phðkÞ ¼~peðkÞ þ~d0þ 2
1þ~r2f ðkÞf~rfðkÞ � ½~d0 þ ð~rfðkÞ �~d0Þ�g; ð14Þ
with ~d0 ¼~ph;0 �~pe;0; where ~pe;0 and ~ph;0 are the elbowand the hand locations in the reference position.
It should be noted that relations (13) and (14) reduceto the expression in Eq. 8 for b = 0, when the arm isfully extended.
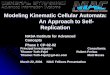
The above modeling process is summarized sche-matically in Fig. 2.
Finally, the model based on Listing’s law presentedhere makes no predictions concerning the evolution ofthe movement over time. Such a model is limited todescribing the geometrical characteristics of the paths.The temporal aspects of the movement could easily beincluded in our framework by modeling the temporaldevelopment of the rotation angle h around the fixedaxis of rotation.
Materials and methods
Subjects and apparatus
Four right-handed male individuals (age range 18–32years old) completed a series of natural reaching andpointing movements of different types. The data werecollected via an Optotrak motion capturing system(Northern Digital, Inc., Waterloo, ON, Canada) at asampling rate of 100 Hz. Joint rotation vectors and end-point trajectories were off-line calculated using a seriesof custom-made subroutines written in Matlab code(MathWorks, Natick, MA, USA). Detailed descriptionsof our subjects and the apparatus are provided in theaccompanying manuscript.
Experimental procedures and design
The experiment consisted of a series of hand movementstoward 3D virtual targets presented sequentially at dif-ferent locations within the 1 m · 1 m · 0.8 m work-space. All four participants completed the set of trials.Modeled end-point kinematic data were compared withthe empirical data obtained in the following experi-mental conditions:
1. Extended arm pointing: movements that started from24 different locations and were performed toward onefinal target position (one set). A set of movementswas repeated five times for each of nine possible finaltarget positions (24 movements · 9 sets · 5times = 1,080 trials per subject).
160

2. Radial reaching: movements that started from a fixedregion (0.4 m from the shoulder) toward 39 differentfinal target positions at a distance of 0.6 m from theshoulder for short movements or at a distance of0.8 m for long movements. This was also repeatedfive times (2 frontal depths · 39 movements · 5times = 390 trials per subject).
3. Frontal plane reaching: movements performed in oneof two fixed fronto-parallel planes at distances of ei-ther 0.30 or 0.60 m relative to the trunk. For thepresent analyses, the movements taken into consid-eration started from six different locations and endedat one of six final target locations, all confined to thesame plane. This was repeated five times until com-pleting the sets (2 fronto-parallel planes · 6 finaltarget locations · 6 movements · 5 times = 360movement trials per subject).
Kinematic data were calculated from at least threeinfrared emitting diodes (IREDs) of the four IREDsmarkers attached to each segment. A computer algo-rithm was used to detect trials that markedly violatedthe assumptions made about the arm kinematics. Suchtrials included, for example, movements in which theelbow and shoulder rotations did not start and end to-gether (i.e., within a time window of 20 ms), or when thejoint angular velocity was >10% of the peak speed atthe start or at the end of the movement for a period of>10% of the movement time. Movement trials thatshowed major shoulder reversals were not taken intoconsideration either.
A linear relationship between the single-axis rota-tion of the shoulder and the elbow flexion–extensionwas assumed. This joint relationship was assessed forradial movements and frontal plane movements. A
Fig. 2 Schematic diagram showing the processes involved in thedata analysis and modeling approach under the constraint ofListing’s law. Arrows indicate the flow of the process. Black linesrefer to internal subprocesses within a stage while dashed lines areused to represent data transfer from one stage to another (Input X,Transformations, Output X¢) once the computations in theprevious stage are completed. After the marker data were pre-processed, segmental data were calculated (the centroids for thewrist, elbow, and shoulder exo-skeletal frames, upper arm length luand forearm length lf). A preliminary movement analysis followed.Arm kinematics were then calculated (translational: displacement xand velocity _x; rotational: rotation vectors ~rn and single-axisrotation vectors ~rab). The single-axis angular velocity vectors ~xðtÞ
were calculated using the ~rn vectors. Best fitting surfaces (i.e.,Listing’s planes) were found for the distributions of the tips of therotation vectors ~rn: The vector ~rpp (orthogonal to the best fittingplane) was defined as the new reference configuration in Listing’scoordinates. The angle h parameterized the rotations of theshoulder relative to ~rpp; while the angle b defined the rotationangle of the elbow joint relative to the upper arm. Finally, datawere compared in terms of the differences between the observed (O)and the simulated (S) paths. Absolute differences between theobserved and the simulated paths were assessed by calculatingmean squared errors Exyz(O,S) while differences in shape betweenthe paths were examined using correlation coefficients qxyz(O,S)
161

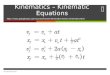
trial was eliminated only when the linear assumptionwas grossly violated at the end or at the start of themovement. The experimenter occasionally re-evaluatedsome of those trials in an attempt to recover them(e.g., when a minor end-point reversal was observed orwhen the velocity profile showed multiple minor peaksat the start or at the end, as shown in Fig. 3a, b). Ifthere were missing data points at movement onset orat the end of the movement, the data were extrapo-lated to the zero velocity level based on a superposi-tion of a minimum-jerk speed profile fitted to thetangential end-point velocity. The best fit was com-puted by minimizing the squared error between theobserved velocity data and the superimposed mini-mum-jerk speed profile (Lee et al. 1997). Figure 3illustrates such a process for two different movementexamples.
The percentage of trials that were automatically de-tected as ‘‘correct’’, ‘‘staggered’’, and ‘‘reversal’’ isshown in Fig. 4. Approximately 35% of the total num-ber of movements was rejected. A large portion of theserejected trials resulted from erroneous performances andnot from violations of the basic assumptions. Forexample, subjects were sometimes unable to move be-tween targets within the specified inter-trial intervals(1.5 s). A delay in the initiation of one movement couldaffect the following one in the sequence. Additional er-rors could occur when the subjects were uncertain aboutthe depth of the perceived virtual object or when theyfailed to pay attention to the task.
It is worth to note that objective criteria and qualityrestrictions were equally applied to all trials andmovement types, in a random and blind manner.Therefore, the percentage of rejected trials was quitehomogeneous among all three types of movements(Fig. 4), and the normal distribution was not violated.Even though the percentage of rejection was quitesignificant, the number of movement trials still left forthe analyses was large because of the large amount ofdata initially collected.
Analysis
The main analysis consisted of a comparison betweenthe predicted paths and the experimental end-pointpaths. Raw marker data were off-line processed toobtain 3D Cartesian coordinates of the forearm andupper arm segments. Listing’s planes were calculatedfor each participant in all repeated sets of pointingmovements of three types. These reference planesserved to define primary position vectors ~rpp: For eachsubject, we obtained mean ~rpp vectors (i.e., the meanof five repetitions of the same sets of movements) fornine extended arm movement levels corresponding tothe nine final target positions, for the long- and shortamplitude radial movements, and for 12 levels infrontal plane movement-type that corresponded to
reaching movements toward six final target positions intwo different fronto-parallel planes. For the simulationof rotations from point to point, a grand mean ~rpp wasused as the reference position derived from a look-uptable of local primary position coordinates. This de-fined one flat Listing’s plane per subject for eachmovement type.
The start and final end-point coordinates of thehand in space ~pa and~pbð Þ were relative to a coordinatesystem whose origin was located at the shoulder. Theupper arm (lu) and the forearm (lf) lengths weredetermined using the IRED marker data. The length luwas defined as the distance from the center of theshoulder markers to the center of the elbow markers.The length lf was defined as the distance from thecenter of the elbow markers to the center of themarkers attached the dorsal side of the hand–wristsystem. Shoulder and elbow rotations were then cal-culated from the marker data, and further converted torotation matrices, rotation vectors, and angular veloc-ity vectors. The best fitting planes were calculatedbased on the rotation vectors.
The differences between the simulated and the realmovements were statistically analyzed by using within-subject analyses of variance (RM-ANOVA). A JMP-2package (SAS Institute Inc., Cary, NC, USA) was usedfor the ANOVAs. Cross-correlation coefficients andabsolute error estimates were used to quantify the dis-crepancies between the simulation results and theexperimental observations. These variables were com-puted as follows:
1. The numerical estimate of the fit for an observedcurve O and its corresponding simulated curve S wascalculated using the correlation coefficient (q(O,S))given by:
qðO; SÞ ¼1=n �
Pni¼1ðOi � OÞ � ðSi � SÞffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1=n �Pni¼1ðOi � OÞ2
s�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1=n �
Pni¼1ðSi � SÞ2
s ;
where n is the number of samples of O and S. For anoptimal fit between the observed and modeled se-quences, q(O,S)=1. The correlation is calculated for thepaths projected on the three planes. The coefficientsobtained are then averaged and used as an estimate ofthe 3D fit between the observed and simulated end-pointpaths.2. The error term is calculated using the root mean
square differences between simulated and discreteobserved paths according to the following formula:
EðO; SÞ ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1=n �
Xn
i¼1ðOi � SiÞ2
s;
where n is the number of samples, S the simulated modeldata and O the observed data.
162

This error analysis is independently applied tothe projections of the hand path into the x–y,x–z, and z–y planes. A total error estimate isobtained by taking the mean of these values,
i.e., Exyx(O, S) = 1/3*[E(Oxy, Sxy) + E(Oxz, Sxz) +E(Ozy, Szy)].
For all statistical analyses, the confidence level wasset at P £ 0.05.
0 50 100 1500
100
200
300
400
500
600
700
Movement A: Nsm
= 1
Time (samples)
Abs
olut
e w
rist v
eloc
ity (
mm
/s)
× ×
0 50 100 1500
100
200
300
400
500
600
700
800
Movement B: Nsm
= 1
Abs
olut
e w
rist v
eloc
ity (
mm
/s)
Time (samples)
a
b
Fig. 3 Estimation of the onsetand end of a movement at zerovelocity levels using anextrapolation method that isbased on the minimum-jerkpolynomial. The experimentervisually defined the limits of themajor unimodal symmetricvelocity profile, as indicated bymarker ‘x’ on the time-axis. Thenumber of minimum-jerksubmovements (Nsm) assumedwithin a movement trial wasNsm=1. The example at the topshows an acceptable estimate ofthe time of onset at zero end-point tangential velocity.However, the estimate achievedby the algorithm was not quiteright for the end of themovement. The example at thebottom shows a successfulestimate for the end of themovement, but not as good anestimate for the time of onset.The experimenter visuallyredefined the end of themovement (or its onset) in casessuch as the bottom example.The trial was rejected when aneducated guess did not lead to asatisfactory extrapolation to theassumed zero velocity level
163

Results
Linear relationship between the h angle around thesingle-axis for the rotations of the upper arm and the bangle for the flexion–extension of the elbow
A regression line was fitted to the angle–angle plots ofthe h angle of the shoulder joint rotation vs the b angleof the elbow joint rotation, in the radial and frontalplane movements. This was carried out to assess thelinear relationship between these two particular jointrotations. The results suggested that the linear assump-tion was valid for the portion of the path that corre-sponded to the transport phase of the hand to the target.High correlation coefficients were obtained for the linearfit in approximately 62% of the trials. For radialmovements the mean correlation coefficient (q) and theSD around the mean correlation were q=0.95 (±0.066)
for subject #1, q=0.94 (±0.076) for subject #2, q=0.95(±0.071) for subject #3 and q=0.95 (±0.066) for sub-ject #4, all significant at P<0.001. Deviations from thelinear fit were occasionally observed at the end ofthe movement, presumably because the last portionof the path was dependent on visual feedback. Close tothe virtual target, one of the joints stopped moving whilethe other still rotated in order to increase pointingaccuracy.
Posture of the arm during point-to-point movements
Our model was designed to predict the 3D end-pointpaths that result from constraining the upper arm seg-ment to postures that obey Listing’s law. Generic armpostures generated by our model are presented inFig. 5a–c.
Fig. 4 Proportion of trials (inpercentages) coded by thecomputer algorithm as‘‘correct’’ (white columns),‘‘reversal’’ (gray columns), and‘‘staggered’’ (black columns) inthe three different movementtypes and for our four subjects.Reversal trials werecharacterized by suddenshoulder or elbow flexion–extension movements duringthe hand transport to thepointing target. Staggered trialswere those for which the elbowor shoulder joint startedrotating out of phase relative toeach other. Correct trials werethose that followed the basicmodel assumptions. Note thatthe number of accepted trials(N) does not includemovements that were re-assessed and which wereeventually included in theanalyses
164

It should be noted that, as a by-product of the single-axis shoulder rotations, the resulting 3D paths of theelbow are likely to be curved.
End-point paths after constraining arm jointsto follow Listing’s law
The following plots show examples of simulated vs ob-served paths in the three movement types studied here(Fig. 6a–c).
Figure 6a shows a series of pointing movements to-ward different locations in space with an extended arm.Note that when the arm is fully extended, there is a closematch between the simulated paths and observed end-point paths. With a few exceptions, this pattern wascommon for all subjects in all sets of extended armmovements.
Examples shown in Fig. 6b are representative oflarge-amplitude radial movements. In this movementtype, deviations from the model predictions were morefrequent regardless of the direction of the movement.A possible explanation for such deviations could befound in the violations of the flat Listing’s planeassumption. The upper arm rotation vectors in thismovement type tended to fit curved surfaces, depend-ing on the amplitude of the rotation. In contrast to theprevious movement types, the discrepancies betweenthe observed and predicted movements during frontalplane movements appeared to be larger and morefrequent (Fig. 6c).
Quantification of the above observations is presentedin the following paragraphs in terms of the differences inthe shape and the mean squared differences between thesimulated and experimental paths.
Differences between modeled and observed paths
Similarities and differences between the predicted andexperimental data can further clarify whether or not ourmodel predicted the actual paths. Modeled vs observedend-point paths for each trial were compared by calcu-lating the error Exyz, independently for the three planesof projection of the 3D movements. These values wereaveraged to obtain an estimate of the differences be-tween the simulated and recorded paths. Exyz valueswere used as the dependent variable in an analysis ofvariance that showed that subjects differed from eachother (F(3,50)=3.49; P=0.015). The ‘‘Movement type’’factor showed a significant effect (F(2,50)=17.42;P<0.001) in that extended arm movements resulted insmaller modeled–observed path differences than radialmovements. Radial movements, in turn, resulted insmaller modeled–observed differences than frontal planemovements.
It should be kept in mind that frontal planemovements had larger d, e, and f coefficients thanother types of movement (rotation surfaces were
twisted), but the SD values around the fitted surfaceswere not significantly larger compared to those foundfor other movement types (see Liebermann et al. 2005,manuscript I). Thus, for frontal plane movements thedeviations of the observed paths from the modeledpaths are likely to be explained by the discrepancybetween the assumed flat Listing’s plane and the actualtwisted surfaces that best fitted these data. Furtherinterpretation of the amount of success or failure ofthe model in predicting realistic movements will bedealt with in the section Discussion for this and theother movement types.
Effects of movement direction on modeled–observedExyz
Extended arm movements were carried out from 24different starting locations toward one single final targetin each set. This was repeated for nine different finaltarget locations. Listing’s planes were determined formovements directed toward each of the nine final targetsindependently, but a mean primary position derivedfrom these Listing’s planes was used to calculatemovement paths. The analysis on the differences be-tween end-point paths using the root mean square dif-ference (Exyz) as the dependent variable showed a majoreffect of the final ‘‘Target location’’ (F(8,169)=6.05;P<0.001). Post hoc pairwise comparisons showed thatmovements toward position #1 (upper left corner),position #5 (the center of the workspace) and position#9 (lower right corner) resulted in non-significant dif-ferences between the predicted and measured pathscompared to the other final locations.
Effects of movement size on the modeled–observed Exyz
In this case, long- and short-radial reaching movementswere analyzed separately and two Listing’s planes werecalculated for each subject from the repeated sets oftrials in long and short amplitude reaching. The resultsshowed that the observed–modeled differences increasedfor large movements as compared to small amplitudemovements (mean Exyz for large=14.01; mean Exyz forshort=11.29). Such differences achieved statistical sig-nificance (F(1,38)=6.07; P=0.014).
Evaluation of modeled–observed path differencesby correlation analyses
The data were also assessed in terms of the correlationbetween the modeled and the observed trajectories.Mean cross-correlation coefficients q(O,S) were used asthe dependent variable in an ANOVA. The ANOVAshowed a major effect for the ‘‘Subjects’’ factor(F(3,50)=19.65; P<0.001). The coefficients for extendedarm, radial and frontal plane movements slightly
165

differed from each other (q(O,S)=0.929, 0.925, and0.918, respectively), but these differences did not achievea statistical significance (F(2,50)=2.98; P=0.051). The
‘‘Subjects’’ and ‘‘Movement type’’ factors interacted(F(11,50)=3.339; P=0.003), most likely because subjectssignificantly differed from each other.
Fig. 5 The illustrations showsimulated arm postures (for theforearm–upper arm link) fordifferent values of the pathparameter k=0.0, 0.1, ..., 1.0, inthree movement typecategories. Thin lines describethe end-point paths of the hand~phðkÞ and the elbow ~peðkÞ at tenstep-values of k (empty dots).The paths result fromconstraining the shoulder torotate about a constant axisgiven by ~nab (dashed line) andfrom imposing a linearconstraint on the rotations ofthe elbow and shoulder joints.The initial and final targetlocations were given by~x0 ¼ luðcosð30�Þ sinð70�Þ;sin(30�) sin(70�), cos(70�)) and~xf ¼ ðlu þ lfÞ ðcosð�60�Þsinð80�Þ; sin(�60�) sin(80�),cos(80�)), respectively. Theassumed upper arm lengthlu=0.30 m and the forearmlength lf=0.32 m. a The topfigure shows the simulated pathof an extended arm movementusing the following parameters:initial target location~x0 ¼ ð0:505; �0:291; 0:212Þ;final target location~xf ¼ ð0:305; �0:529; 0:108Þ;initial rotation vector~ra ¼ ð1:7892; 0:2749; 0:5964ÞT;final rotation vector~rb ¼ ð0:0001;�0:1162; �0:5727ÞT; initialflexion angle b0=0�; finalflexion angle bf=0�. b Themiddle figure shows thesimulated path of a radial armmovement. The parametersused were ~x0 ¼ ð0:3; 0; 0Þ;~xf ¼ ð0:6; 0:1; 0:1Þ;~ra ¼ ð0:7668; 0:4837;�0:6299ÞT; ~rb ¼ ð0:0891;�0:0701; 0:0336ÞT; b0=122.2�and elbow bf=12.3�. c Thebottom figure presents thesimulation result of a frontalplane movement. In this case,the parameters were~x0 ¼ ð0:3; 0:4; 0:2Þ;~xf ¼ ð0:3; �0:45; �0:15Þ;~ra ¼ ð0:2737; �0:0198;�0:2349ÞT ~rb ¼ ð0:6539;0:0210;�0:9877ÞT; b0=59.4�and elbow bf=50.3�. Note thatin frontal movements thetargets at the start and the endlie in the same plane
166

Results on the directional constancy of the single-axisangular velocity vector
As suggested in the Theoretical Model section, rotationswere assumed to be about a single axis and therefore theangular velocity vector ~xðtÞ was assumed to maintain aconstant direction under the constraint of Listing’s law(Hepp 1990). This implies that the transition from ~ra to~rb should follow a straight-line path within Listing’splane. However, the suitability of the flat Listing’s planeconstraint in some movement types does not precludethe possibility that differences between the modeled andthe observed paths could be caused by a change in thedirection of the axis of rotation of the upper arm duringa movement, or likewise by changes in direction of thesingle-axis angular velocity vector ~xðtÞ:
We calculated ~xðtÞ vectors using Eq. 15 in theAppendix. The directional constancy of ~xðtÞ is quanti-fied, but since ~xðtÞ ¼ ðxxðtÞ; xyðtÞ; xzðtÞÞ; the meanand SD values were calculated for each component. The~xðtÞ data (in rad/s) of each movement trial weresmoothed using a median running time-window ofthree samples. For comparison purposes, they werenormalized to maximum. A coefficient of variation(CV) was obtained from the ratio CV ðxiÞ ¼SDðxiÞ=MeanðxiÞj j; i ¼ x; y; z; independently for xx(t),xy(t), and xz(t). A mean homogeneity factor�Hð~xÞ ¼ 1=3 � ½CV (xx)þ CV (xy)þ CV (xz)] was thencomputed and used as an estimate of the directionalconstancy of ~xðtÞ: �Hð~xÞ values near zero would indi-cate relative directional constancy of the axis of theangular velocity vector.
Figure 7 shows typical examples of the results ob-tained for the ~xðtÞ vectors.
A plain visual inspection of any set of trials led to theconclusion that ~xðtÞ does not keep a constant direction.This was confirmed by the �Hð~xÞ results, which showedvalues significantly different from zero. Only a fewmovements showed low �Hð~xÞ: The mean homogeneityfactor �Hð~xÞ for the different types of movement was0.996 (SD ±0.448, median 0.924) for extended armmovements, 0.966 (SD ±0.453, median 0.88) for radialmovements and 1.034 (SD ±0.450, median 0.989) forthe frontal plane movements. Although, ~xðtÞ vectors infrontal plane movements were the least constant, anal-yses showed that differences in �Hð~xÞ among movementtypes were not significant (P=0.137). Distribution plotsof �Hð~xÞ vectors in each movement type are presented inFig. 8.
Discussion
Different neural substrates are responsible for specifyingthe posture of the arm during the transport phase andfor grasping an object (Humphrey 1979). This is also
Fig. 6 Randomly chosen examples of three-dimensional simulatedpaths (line), as predicted by the model vs the observed end-pointpaths (dots) during: a fully extended arm movements, b radial armmovements, and c frontal plane arm movements performed to onefinal target (x, y, and z coordinates in meters) from differentstarting locations
167

evident at the arm kinematic level (Jeannerod 1988,1990). In the present investigation, we have focused onthe transport of the hand towards a target. Some au-thors have argued that transporting the hand in a point-to-point movement is planned in extrinsic coordinates(Flash and Hogan 1985; Wolpert et al. 1995). Othershave suggested that intrinsic joint coordinates could beused (Flanagan and Ostry 1989).
In line with the latter view, we have introducedListing’s law as a relevant constraint for the rotations ofthe upper arm segment about the shoulder. We assumedthat a flat Listing’s plane dictates the arm orientationunder the constraint of a constant axis of rotation (i.e.,rotations of minimal amplitude), and consequently, thiswas expected to dictate also the extrinsic hand paths.
We compared simulation results with experimentalresults. These results were expected to bring aboutsome insights into meaningful intrinsic kinematic
planning strategies used by the brain. However, thiscould only be realized under the assumption that themotor plans for achieving the desired motor executionschemes are not too strongly affected by the movementdynamics, or by assuming that the motor system hasan accurate internal representation of arm dynamics inorder to compensate for possible distortions. In ourkinematic modeling approach, such dynamic effectswere not considered.
Previous studies investigated the relevance of List-ing’s law for the arm (Straumann et al. 1991; Hore et al.1992; Miller et al. 1992; Crawford and Vilis 1995). Ingeneral, Listing’s law appears to be obeyed, although ithas been pointed out that its implementation may de-pend on several factors that determine the degree ofcurvature or twist of the Listing’s rotation surface. Forexample, the type of motor task that is being performedand its goal (Hore et al. 1994; Ceylan et al. 2000), the
Fig. 7 Examples of three-dimensional angular velocity vectors~xðtÞ for the shoulder joint during extended arm movements (dottedline) expressed in normalized units (NU) for comparison purposesonly. The dot-start in the zoomed illustration in the centerrepresents the end of the movement; the dot in each small plot
represents the median value of ~xðtÞ: The examples show that ~xðtÞvectors do not maintain constant axes. A similar observation wasmade regardless of the performer, amplitude, direction, or type ofmovement
168

specific kinematic requirements of the task (Admiraalet al. 2001), and the context in which the movement iscarried out (Medendorp et al. 2000).
The findings reported in the accompanying manu-script (Liebermann et al. 2005) suggested that the typeof movement carried out affected the suitability of aListing’s plane constraint. This might have a partialinfluence on the results in this second part of ourstudy. Frontal plane movements, for example, showedlarge discrepancies between experimental and modeledpaths perhaps because the flat Listing’s planeassumption was the least suitable for such a typeof movement. This was not the case for radialmovements because the results showed a reasonabledegree of correspondence between simulated andexperimental paths. Yet, the shoulder rotations in ra-dial movements somewhat deviated from the flatListing’s law constraint and fitted curved planes butcurvature for these planes was inconsistent and chan-
ged as a function of the amplitude of the rotation. Asa consequence, short radial movements presented areasonably good degree of correspondence betweensimulated and experimental paths. For extended armmovements, the upper arm rotation vectors fitted two-dimensional surfaces which were very close to a flatListing’s plane (<2� thickness). Differences betweenthe modeled and the observed paths in extended armmovements were small.
The findings in the extended arm pointing and shortamplitude radial reaching movements strongly suggestedthat a two-dimensional Listing’s surface could beimplemented as a general working assumption. Never-theless, our model based on a Listing’s law constraintdid not always precisely predict the experimental handpaths even in such movements. Small discrepancies be-tween the simulated and observed paths could beattributed to reasons other than deviations from theplanar assumption. In the next paragraphs, we will dis-cuss possible sources of error in our modeling approachthat might have contributed to the differences betweenthe predicted and observed paths.
Effects of violations of the single-axis rotationassumption on the discrepancies between predictedand observed hand paths
In our model, we have adopted a flat Listing’s constraintas a first-order approximation for the rotations of theupper arm. This was a simplifying assumption forassessing the success of our kinematic model inaccounting for at least part of the shoulder jointbehavior. Twisted manifolds were found during frontalplane movements, which could explain the discrepanciesbetween the modeled and observed paths. However,during extended arm and radial movements of smallamplitude, a flat Listing’s plane was a reasonableassumption, and yet, in these conditions there were trialsthat did not show a full correspondence between themodeled and the observed hand paths. Such differencescould be attributed to deviations from the assumptionthat the rotation vectors within a Listing’s plane follow astraight line.
Our experimental data showed that the single-axisrotation assumption was violated throughout themovements, regardless of how close the rotation vectorsof the upper arm fitted a flat Listing’s plane. In a com-parable experiment, Gielen et al. (1997) also reported alack of support for fixed-axis angular velocities. Thisimplies that rotation vectors in a Listing’s plane mayfollow paths other than straight. A theoretical accountfor the possibility that a Listing’s plane assumption maybe independent from the direction of the axes of rotationis provided in the Appendix. This could explain thediscrepancies between the simulated and observed handpaths in conditions when the rotation vectors of theupper arm closely fitted a flat Listing’s plane.
Fig. 8 The plots for a extended arm, b short amplitude radial, andc frontal plane movements show the frequency distributions of the�Hð~xÞ for N number of trials. Clearly, only a few of the movementscollected showed values close to zero
169

Distortions in sensorimotor mapping and deviationsfrom Listing’s law
Differences between our model predictions and theexperimental observations could also be caused byinaccuracies in the sensorimotor transformations thatunderlie reaching for visual objects in space.
Henriques and Crawford (2000) demonstrated thaterrors in mapping visual sensory information have adetrimental effect on the motor commands during theperformance of pointing movements towards visuallymemorized targets situated either along verticalmeridians or within the horizontal plane. For thehorizontal plane movements, Henriques and colleagues(2003) provided further evidence suggesting that thetransformations from (binocular) visual coordinates tospatial hand coordinates are inaccurate when the gazeis on target. They suggested that the accuracy inpositioning the hand depends on the target depth rel-ative to the eyes and relative to other target locations(Henriques et al. 2003), and is not dependent on theamplitude of the movement. In our experiments, dif-ferences between short vs long radial movements couldthus be explained by the errors in mapping eye-posi-tion information and not necessarily to the incorrectimplementation of Listing’s law during motor execu-tion.
Van Beers et al (2002) linked the two perceptualmodalities relevant for the present study (i.e., vision orproprioception) and hand movement directions in three-dimensions. Their findings suggest that vision is domi-nant when changes in target position take place alongthe frontal plane (as in our frontal plane movements).On the other hand, proprioception becomes dominantwhen changes in target position require the hand tomove at different depths in the orthogonal directionrelative to the frontal plane of the trunk (as in our radialmovements).
According to the above findings, reaching for visualtargets at different radial depths leads to errors in per-formance that are related to sensorimotor mapping er-rors. Intrinsic joint control based on Listing’s law maythus be more relevant during reaching at different depthsin the radial direction. On the other hand, control ofhand reaching based on eye-position information maybe more relevant during frontal plane movements be-cause all visual targets in this condition lie within a planethat is located at a constant depth from the eyes.
Effect of dynamics of the arm at executionon the predicted hand paths
Admiraal et al. (2001) reported that arm velocity alonemay influence the fit to a Listing’s surface suggestingthat dynamics could affect the expression of an intrinsickinematic plan based on a Listing’s law-like strategy.The effects of interaction torques (Hollerbach and Flash1982) during the execution of arm movements should be
mentioned at this point. Inertial, Coriolis and centrifu-gal forces interact in rotating arm joints during reachingfor visual targets (Hollerbach and Flash 1982). Theirinteraction depends on the type of movement and thejoint angular velocities. In the absence of an adequatecancellation or compensation for such effects, move-ments would deviate from the pre-planned path duringtheir execution (Hollerbach and Flash 1982).
A possibility that should be considered for selecting adesired arm configuration and/or hand path is a strategythat involves the optimization of an objective functionthat is neither purely kinematic nor purely dynamic.Soechting and Flanders (1998) have examined severaloptimization criteria during movements in the para-sagittal planes. They first reported a model based on theminimization of the rate of change of joint torques thatfailed to predict realistic paths, and proposed an alter-native model based on the minimization of the rate ofchange of muscle forces that corresponded more closelywith the observed hand paths. Soechting and Flanders(1998) also suggested that minimization of the peakvalue of the kinetic energy could account for the ob-served arm orientation.
The forward modeling approach presented heredoes not consider movement dynamics or static effects,and is purely kinematic based only on geometricconstraints. The model is relatively simpler than themodels proposed by Soechting and Flanders (1998).Such a simplification may pose a limitation on ourmodel but in light of the generally successful fit be-tween the simulated and experimental paths in ex-tended arm and radial movements, the underlyingkinematic plan appears to account for the path char-acteristics of some movement types. This is consistentwith the results of a recent study by Hermens andGielen (2004) that compared models based on Listing’slaw to other models (e.g., based on the minimizationof work, torque change, or variance). In that study, itwas demonstrated that the intrinsic kinematic ap-proach based on Listing’s law provides the smallestdiscrepancies between the measured and predicted armpostures at the end of a movement.
To conclude, the results from our model suggest thepossibility that kinematic considerations do play adominant role in the planning of joint rotations andhand paths during three-dimensional arm movements aswell as in the planning of a proper orientation of thearm. A weakness of the present approach is that themodel did not take into consideration the effects ofdynamics, which could influence the hand trajectories atthe execution stage.
Summary
Listing’s law may be a valid constraint for the control ofthe upper arm segment at the intrinsic level in somemovement conditions. We have used a modeling ap-proach that assumed that the shoulder joint rotations
170

are constrained by a flat Listing’s plane and single-axisrotations. We have also assumed that there is a linearrelationship between the elbow and the shoulder rota-tions.
Support for the validity of the Listing’s planeassumption was presented in the first manuscript (Lie-bermann et al. 2005). In this second manuscript, weshow that there is no evidence for single-axis rotations.We consolidate these results by suggesting that the armrotation vectors could lie in a Listing’s plane eventhough they could follow paths other than straight lineswithin the plane.
We have shown that it is possible to account for thegeneral kinematic characteristics of end-point pathsduring three-dimensional movements based on theimplementation of the flat Listing’s plane constraint.Our model predicted reasonably well the hand pathsduring pointing with an extended arm towards mostdirections and during short amplitude radial reachingmovements. Minor discrepancies between the model andthe observed paths could be explained by a violation ofthe single-axis rotation assumption. For movementsperformed in a frontal plane, the rotation vectors didnot fit a Listing’s plane and the differences betweensimulated and experimental paths were large. Static anddynamic characteristics of the arm rather than kine-matics may become dominant factors in the choice of astrategy for the control of the arm orientation in frontalplane movements. Perceptual considerations may alsoplay an important role in this case.
Future research should consider a model that in-cludes other manifolds for Listing’s law (e.g., a curvedplane), and a model that predicts the extrinsic handkinematics from constraining the rotation vectors of theupper arm to follow specific paths such as curved pathswithin a Listing’s plane.
Acknowledgements The authors wish to thank Jason Friedman forhis comments on an earlier version of this manuscript. This re-search was supported in part by a research grant from the IsraeliMinistry of Science and by the Moross laboratory. Tamar Flash isan incumbent of the Hymie Moross Professorial chair.
Appendix
On the relationship between the path in rotation vectorspace and the angular velocity vector
Given the rotation vector ~r(t), the angular velocity canbe derived according to (Hepp 1990):
~xðtÞ ¼ 2_~r þ~r � _~r1þ~r2 ; ð15Þ
where the dot denotes derivation with respect to time.We assume that the initial and final arm configura-
tion described by ~ra and ~rb; respectively, lie in Listing’splane.
We first show that if these rotation vectors follow astraight path in Listing’s plane between the initial andfinal configuration, the axis of rotation is fixed in space.A straight line in rotation vector space is given by:
~rðkÞ ¼~ra þ kð~rb �~raÞ; ð16Þwhere k is an arbitrary path parameter between 0 and 1.
If ~n denotes the normal vector of Listing’s plane, allpoints within Listing’s plane can be described by:
ð~r �~raÞ �~n ¼ 0. ð17Þ
It follows that the rotation vectors defined in (17) liein Listing’s plane since
ð~rðkÞ �~raÞ �~n ¼ kð~rb �~raÞ �~n ¼ 0. ð18Þ
The angular velocity corresponding to a straight linein rotation vector space can be obtained by inserting (16)into (15):
~xðtÞ ¼ 2_~r þ~r � _~r1þ~r2 ¼ 2
~r 0 þ~r �~r 01þ~r2
_kðtÞ;
¼ 2 _kðtÞ ð~rb �~raÞ þ~ra �~rb
1þ~r2a þ 2kðtÞ~rað~rb �~raÞ þ k2ðtÞð~rb �~raÞ2;
ð19Þwhere the prime denotes derivation with respect to k.Equation 20 can be written in the form:
~xðtÞ ¼ xðtÞ~nab; ð20Þwhere
xðtÞ¼2 _kðtÞ ð~rb�~raÞþ~ra�~rbj j1þ~r2aþ2kðtÞ~rað~rb�~raÞþk2ðtÞð~rb�~raÞ2
; ð21Þ
~nab ¼ð~rb þ~raÞ þ~ra �~rb
jð~rb �~raÞ þ~ra �~rbj� const. ð22Þ
We conclude that the angular velocity vector ~xðtÞdoes not change its direction. It only changes its absolutevalue. Straight paths in rotation vector space, therefore,correspond to single-axis rotations.
We investigate next the change of angular velocity fora curved path in Listing’s plane between the initial andfinal configuration, ~ra and ~rb: As an example, we con-sider a curved path in rotation vector space of the fol-lowing form:
~rðkÞ ¼~ra þ kð~rb �~raÞ þ kð1� kÞð~n� ð~rb �~raÞÞ; ð23Þwhere ~n denotes again the normal of Listing’s plane.
It should be noted that as for the straight path inListing’s plane ~rð0Þ ¼~ra; rð1Þ ¼~rb and all rotationvectors (23) lie in the plane, since
ð~rðkÞ �~raÞ �~n ¼ kð~rb �~raÞ þ kð1� kÞð~n� ð~rb �~raÞÞ½ � �~n¼ 0.
ð24Þ
171

The angular velocity follows from (15) and (23). Aftersome algebraic transformations, we get:
~xðtÞ¼ 2 _kðtÞ1þ�~raþkðtÞð~rb�~raÞþkðtÞð1�kðtÞÞð~n�ð~rb�~raÞÞ
�2 ��ð~rb�~raÞþ~ra�ð~rb�~raÞþð1�2kðtÞÞ~n�ð~rb�~raÞþ~ra½
�ð~n�ð~rb�~raÞÞ��k2ðtÞð~rb�~raÞ�ð~n�ð~rb�~raÞÞ
�; ð25Þ
which can be written, as before, in the form:
~xðtÞ ¼ ~xðtÞ~nabðtÞ: ð26Þ
In contrast to (20), the axis of rotation in (26) is notfixed in space, but is a function of the path parameter k.Each point of the path in rotation vector space thereforecorresponds to a different axis of rotation.
References
Abend W, Bizzi E, Morasso P (1982) Human arm trajectory for-mation. Brain 105:331–348
Admiraal MA, Medendorp WP, Gielen CCAM (2001) Three-dimensional head and upper arm orientations during kinemat-ically redundant movements and at rest. Exp Brain Res142:181–192
Atkeson CG, Hollerbach JT (1984) Kinematic features of unre-strained arm movements (Technical Report 790). ArtificialIntelligence Laboratory, MIT, Boston, MA
Biess A, Flash T, Liebermann DG (2001) Multijoint point-to-pointarm movements of humans in 3d-space—minimum kinetic en-ergy paths. In: Meulenbroek R, Steenberger B (eds) Proceedingsof the Tenth Biennial Conference of the InternationalGraphonomics Society. Institute for Cognition and Informa-tion Pub, Nijmegen, pp 142–147
Ceylan M, Henriques DYP, Tweed DB, Crawford JD (2000) Task-dependent constraints in motor control: pinhole goggles makethe head move like an eye. J Neurosci 20:2719–2730
Collewijn H, Ferman L, Van den Berg AV (1988) The behaviorof human gaze in three-dimensions. In: Cohen B, Henn V(eds) Representation of three-dimensional space in the ves-tibular oculomotor and visual systems. Ann N Y Acad Sci545:105–127
Craig JJ (1989) Introduction to robotics. Mechanics and control.Addison-Wesley, Reading, MA, pp 28–59
Crawford JD, Vilis T (1995) How do motor systems deal with theproblems of controlling three-dimensional rotations? J MotBehav 27:89–99
Flanagan JR, Ostry DJ (1989) Trajectories of human multijointarm movements: evidence of joint level planning. In: HaywardV, Khatib O (eds) Lecture notes in control and informationsciences. Experimental robotics I, vol 139. Springer, BerlinHeidelberg New York, pp 594–613
Flash T, Hogan N (1985) The coordination of arm movements: anexperimentally confirmed mathematical model. J Neurosci7:1688–1703
Georgopoulos AP, Lurito JT, Petrides M, Schwartz AB, Massey JT(1989) Mental rotation of the neuronal population vector.Science 243:234–236
Gielen CCAM, Vrijenhoek EJ, Flash T, Neggers SFW (1997) Armposition constraints during pointing and reaching in 3D. JNeurophysiol 78:1179–1196
Haslwanter T (1995) Mathematics of 3-dimensional eye rotations.Vision Res 35:1727–1739
Henriques DYP, Crawford JD (2000) Direction-dependent distor-tions of retinocentric space in the visuomotor transformationfor pointing. Exp Brain Res 132:179–194
Henriques DYP, Medendorp WP, Gielen CCAM, Crawford JD(2003) Geometric computations underlying eye-hand coordi-nation: orientation of the two eyes and the head. Exp Brain Res152:70–78
Hepp K (1990) On Listing’s law. Commun Math Phys 132:285–292Hermens F, Gielen CCAM (2004) Posture-based or trajectory-
based movement planning? A comparison of direct and indirectpointing movements. Exp Brain Res 159:340–348
Hollerbach JM, Atkeson CG (1986) Characterization of joint-interpolated arm movements. In: Heuer H, Fromm C (eds)Generation and modulation of action patterns. Exp Brain ResSuppl(15):41–54. Springer, Berlin Heidelberg New York
Hollerbach JM, Atkeson CG (1987) Deducing planning variablesfrom experimental arm trajectories: pitfalls and possibilities.Biol Cybern 56:279–292
Hollerbach JM, Flash T (1982) Dynamic interactions between limbsegments during planar arm movement. Biol Cybern 44:67–77
Hore J, Watts S, Vilis T (1992) Constraints on arm position whenpointing in three dimensions: Donders’ law and the Fick gim-bals strategy. J Neurophysiol 68:374–383
Hore J, Watts S, Tweed D (1994) Arm position constraints whenthrowing in three dimensions. J Neurophysiol 72:1171–1180
Humphrey DR (1979) On the organization of visually directedreaching: contributions by nonprecentral motor areas. In: Tal-bott RE, Humphrey DR (eds) Posture and movement. RavenPress, New York, NY, pp 51–112
Jeannerod M (1988) The neural and behavioral organization ofgoal-directed movements. Oxford University Press, Oxford
Jeannerod M (1990) The representation of the goal of an actionand its role in the control goal-directed movements. In: Sch-wartz EL (ed) Computational neuroscience. MIT Press, Cam-bridge, MA, pp 352–368
Kaminski T, Gentile AM (1986) Joint control strategies and handtrajectories in multijoint pointing movements. J Mot Behav18:261–278
Lee D, Port NL, Georgopoulos AP (1997) Manual interception ofmoving targets II. On-line control of overlapping submove-ments. Exp Brain Res 116:421–433
Marotta JJ, Medendorp WP, Crawford JD (2003) Kinematic rulesfor upper and lower arm contributions to grasp orientation.J. Neurophysiol 90:3816–3827
Medendorp WP, Crawford JD, Henriques DYP, Van GisbergenJAM, Gielen CCAM (2000) Kinematic strategies for upperarm-forearm coordination in three dimensions. J Neurophysiol84:2302–2816
Miller LE, Theeuwen M, Gielen CCAM (1992) The control of armpointing movements in three dimensions. Exp Brain Res90:415–426
Morasso P (1981) Spatial control of arm movements. Exp BrainRes 42:223–227
Nakano E, Imamuzu H, Osu R, Uno R, Gomi H, Yoshioka T,Kawato M (1999) Quantitative examinations of internal rep-resentations for arm trajectory planning: minimum commandedtorque change model. J Neurophysiol 81:2140–2155
Nelson WL (1983) Physical principles for economies of skilledmovements. Biol Cybern 46:135–147
Richardson MJE, Flash T (2002) Comparing smooth arm move-ments with the two-thirds power law and the related segmented-control hypothesis. J Neurosci 22:8201–8211
Schaal S, Sternad D (2001) Origins and violations of the 2/3 powerlaw in rhythmic three-dimensional arm movements. Exp BrainRes 136:60–72
Soechting JF, Flanders M (1998) Movement planning: kinematics,dynamics, or both? In: Harris L, Jenkin M (eds) Vision andaction. Cambridge University Press, New York, NY, pp 332–349
Soechting JF, Lacquaniti F (1981) Invariant characteristics of apointing movement in man. J Neurosci 1:710–720
172

Soechting JF, Terzuolo CA (1988) Sensorimotor transformationsunderlying the organization of arm movements in three-dimensional space. Can J Physiol Pharmacol 66:502–507
Soechting JF, Buneo CA, Herrmann U, Flanders M (1995) Movingeffortlessly on three dimensions: does Donders’ Law apply toarm movements? J Neurosci 15:6271–6280
Straumann D, Haslwanter T, Hepp-Reymond MC, Hepp K (1991)Listing’s law for the eye, head and arm movements and theirsynergistic control. Exp Brain Res 86:209–215
Todorov E, Jordan MI (1998) Smoothness maximization along apredefined path accurately predicts speed profiles of complexarm movements. J Neurophysiol 80:696–714
Torres EB, Zipser D (2002) Reaching to grasp with a multi-jointed arm. I. Computational model. J Neurophysiol 88:2355–2367
Tweed D, Vilis T (1987) Implications of rotational kinematics forthe oculomotor systems in three dimensions. J Neurophysiol58:832–849
Tweed D, Vilis T (1990) Geometric relations of eye position andvelocity vectors during saccades. Vision Res 30:111–127
Uno Y, Kawato M, Suzuki R (1989) Formation and control ofoptimal trajectory in human multijoint arm movement. Mini-mum torque-change model. Biol Cybern 61:89–101
Van Beers RJ, Wolpert DM, Haggard P (2002) When feeling ismore important than seeing in sensorimotor adaptation. CurrBiol 12:834–837
Vilis T, Tweed D (1991) What can rotational kinematics tell usabout the neural control of eye movements? In: Humphrey DR,Freund H-J (eds) Motor control: concepts and issues. Wiley,New York, NY
Viviani P, Flash F (1995) Minimum-jerk, two-thirds power law,and isochrony: converging approaches to movement planning.J Exp Psychol Hum Percept Perform 17:32–53
Viviani P, Terzuolo C (1982) Trajectory determines movementdynamics. J Neurosci 7:431–437
Wang X (1998) Three-dimensional kinematic analysis of influenceof hand orientation and joint limits on the control of armpostures and movements. Biol Cybern 80:449–463
Wang X, Verriest JP (1998) A geometric algorithm to predict thearm reach posture for computer-aided ergonomic evaluation.J Vis Comput Anim 9:33–47
Westheimer G (1957) Kinematics of the eye. J Optic Soc Am47:967–974
Wolpert DM, Ghahramani Z, Jordan MI (1995) Are arm trajec-tories planned in kinematic or dynamic coordinates? Anadaptation study. Exp Brain Res 103:460–470
173