Embed Size (px)
Citation preview
Introdução à
Engenharia ElétricaGrupo de Automação & Controle
EEE071 - Introdução À Engenharia Elétrica
Prof. Fernando Passold
Enfoque desta disciplina:
• Problemas ou “pequenos desafios” que devem ser resolvidos durante as aulas e fora dos horários de aula
• Noções de automação & controle mescladas com a parte prática da disciplina.
• Obs: o sucesso e conclusão de cada equipe depende muito do empenho de cada um dos alunos.
2Intro. Eng. Elétrica | UPF | Área Automação & Controle
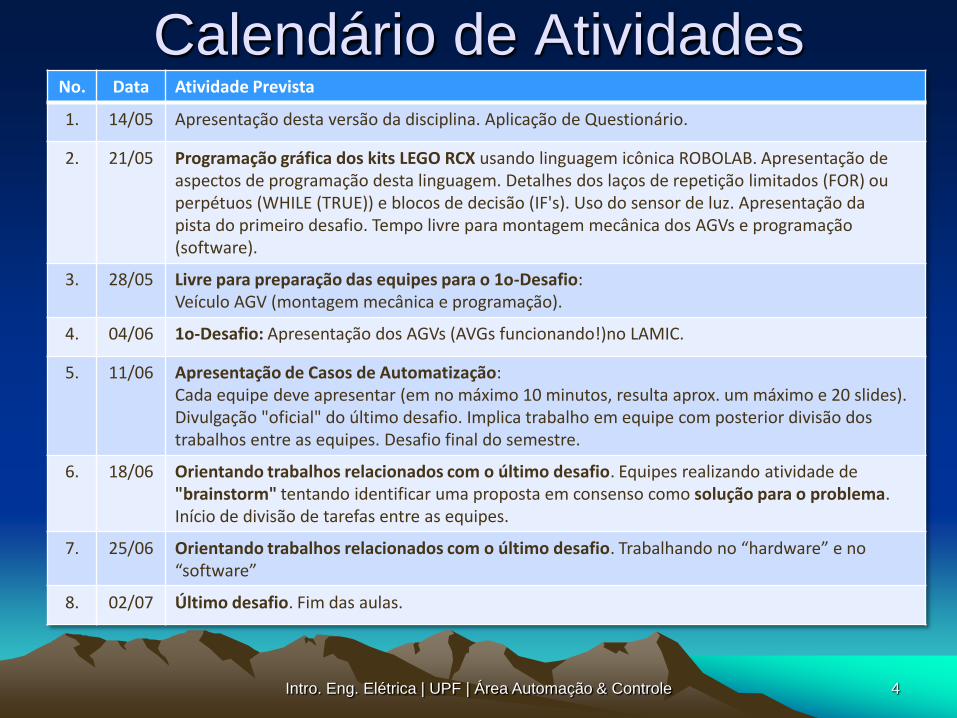
Calendário de Atividades
Intro. Eng. Elétrica | UPF | Área Automação & Controle 4
No. Data Atividade Prevista
1. 14/05 Apresentação desta versão da disciplina. Aplicação de Questionário.
2. 21/05 Programação gráfica dos kits LEGO RCX usando linguagem icônica ROBOLAB. Apresentação deaspectos de programação desta linguagem. Detalhes dos laços de repetição limitados (FOR) ouperpétuos (WHILE (TRUE)) e blocos de decisão (IF's). Uso do sensor de luz. Apresentação dapista do primeiro desafio. Tempo livre para montagem mecânica dos AGVs e programação(software).
3. 28/05 Livre para preparação das equipes para o 1o-Desafio: Veículo AGV (montagem mecânica e programação).
4. 04/06 1o-Desafio: Apresentação dos AGVs (AVGs funcionando!)no LAMIC.
5. 11/06 Apresentação de Casos de Automatização: Cada equipe deve apresentar (em no máximo 10 minutos, resulta aprox. um máximo e 20 slides).Divulgação "oficial" do último desafio. Implica trabalho em equipe com posterior divisão dostrabalhos entre as equipes. Desafio final do semestre.
6. 18/06 Orientando trabalhos relacionados com o último desafio. Equipes realizando atividade de "brainstorm" tentando identificar uma proposta em consenso como solução para o problema. Início de divisão de tarefas entre as equipes.
7. 25/06 Orientando trabalhos relacionados com o último desafio. Trabalhando no “hardware” e no “software”
8. 02/07 Último desafio. Fim das aulas.
Método de Avaliação:
• 3 Notas:
1. 1º Desafio: Veículo AGV;
2. Apresentação de casos de automação;
3. 2º e último desafio: caso de automação de
um sistema (o trabalho é o resultado da
interação entre as equipes)
– Se considera a participação (nível de entusiasmo, dedicação e
iniciativa individuais de cada aluno).
Intro. Eng. Elétrica | UPF | Área Automação & Controle 5
Avaliação 2) Casos de Automação:• Cada equipe deve apresentar (em no máximo 10 minutos, resulta aprox. um máximo e 20 slides)
um caso real de automatização de um processo produtivo qualquer.
• Alguns itens devem ser ressaltados:
– Apresentar o processo: O que é? Onde fica? O que faz? Eventualmente mostrar dados como: produção antes da automatização x produção depois da automatização;
– Mostrar o "chão de fábrica" (fotos?); Mostrar máquinas já presentes; Eventualmente perceber se foi necessário adicionar mais máquinas para tornar o processo mais automático?
– Apresentar o processo produtivo - o que faz este setor da empresa? O item que este setor produz é passado para outra seção na empresa ou já se constitui no produto final da empresa?
– Apresentar a seqüência deste processo produtivo (etapas); Existe comunicação entre as máquinas? Quem realiza a comunicação entre as máquinas? Uma esteira, uma grua transportadora, humanos?
– Há necessidade de sensores? Quais? Onde? Para que servem?
– Tipo de atuadores (motores, pistões, etc) usados neste processo produtivo? Como são empregados neste caso (mostrar);
– Existe relação entre "atuação" x "sensoriamento"? Isto é, existe relação entre: "sensor perceber uma alteração, aguardar um período de tempo pré-determinado e acionar um pistão, por exemplo?
– Como é realizado o "Controle Automático" deste processo? Uso de um "CLP"? O que seria um "CLP"? Poderia ser realizada uma equivalência deste controlador com o bloco RCX?
Intro. Eng. Elétrica | UPF | Área Automação & Controle 6
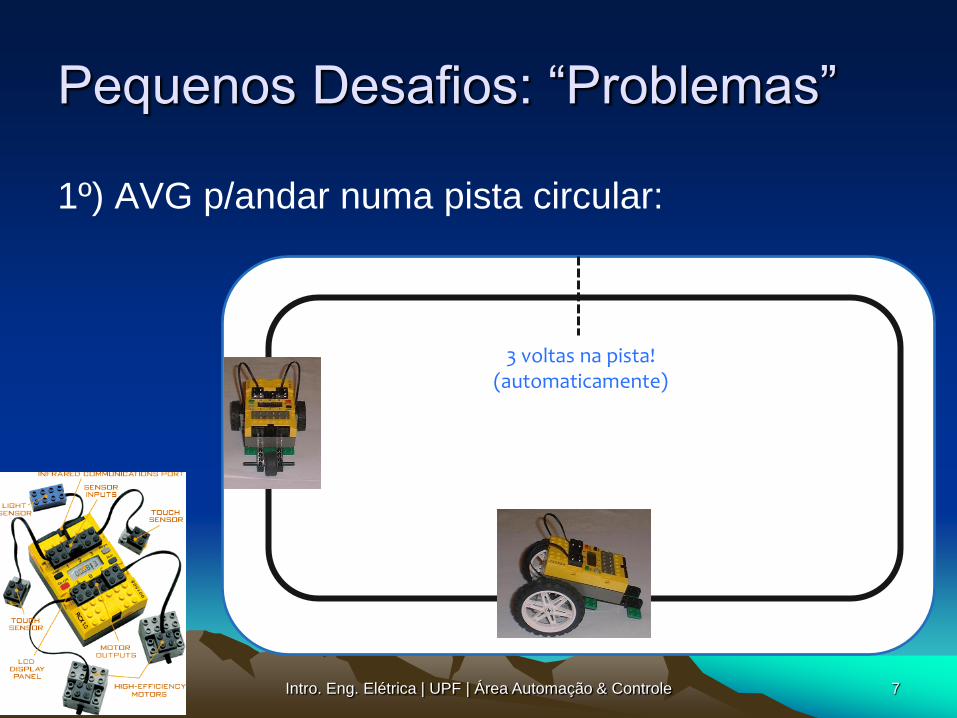
Pequenos Desafios: “Problemas”
1º) AVG p/andar numa pista circular:
7Intro. Eng. Elétrica | UPF | Área Automação & Controle
3 voltas na pista!(automaticamente)

O que é um “AGV”? • AGV: Automated Guided Vehicle;
• Exemplos: transporte automatizado de
mercadorias.
Intro. Eng. Elétrica | UPF | Área Automação & Controle 8

Exemplo de automatização de portos:
• In July 2008, Brisbane (Australia)
opened the world’s only fully
automated container terminal.
• Seagirt_Container_Teriminal_Simulation.flv
• STRADDLE_CARRIER_at_E.C.T._DELTA_
ROTTERDAM_MADE_BY_LAURENS.flv
Intro. Eng. Elétrica | UPF | Área Automação & Controle 9
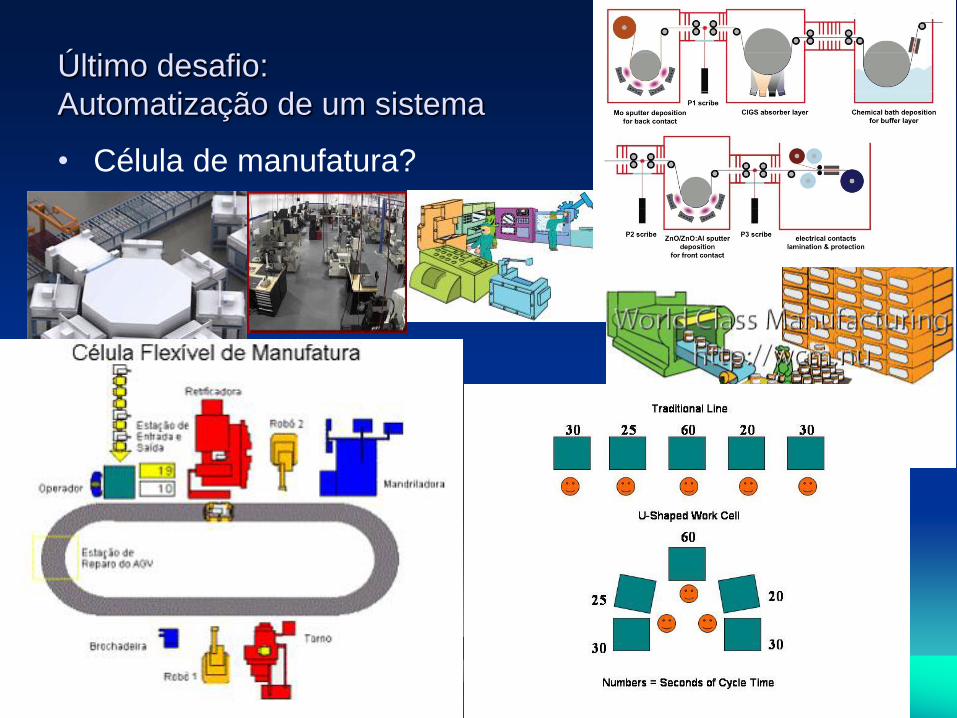
Último desafio:
Automatização de um sistema
• Célula de manufatura?
Intro. Eng. Elétrica | UPF | Área Automação & Controle 10
“Desafios” usando Lego/ROBOLAB...
• Propostos pequenos problemas da área
de automação que podem ser resolvidos
usando como ferramenta de
implementação:
• Kits Lego MindStorms
9793
13Intro. Eng. Elétrica | UPF | Área Automação & Controle
O Kit “ROBOLAB DESAFIO”(ferramenta adotada)
• Ou “LEGO MINDSTORM Robotics Invention
System” (RIS 2.0):
14Intro. Eng. Elétrica | UPF | Área Automação & Controle

O Kit “ROBOLAB DESAFIO”
• Principais
componentes:
– Bloco de controle RCX
(Robotics Control
eXplorer) – o “cérebro”
do sistema;
– 2 motores c/redução;
– 2 sensores de toque;
– 2 sensor de luz;
– 1 lâmpada.
15Intro. Eng. Elétrica | UPF | Área Automação & Controle

Usando Lego para resolver problemas...• Exemplos:
16Intro. Eng. Elétrica | UPF | Área Automação & Controle

Soluções já existentes:
A) Estrutura de triciclo: B) Diferencial:
Roda +
motor 1
Roda +
motor 2
Pára-choques
Pára-choques
Roda livre
Roda livre
Centro
geométrico
Roda
Encoder
1
2
yc
xc
Roda
giratória com
propulsor
xy
Tipos de tração:
17

Soluções já existentes:
• Outras formas de tração:
18Intro. Eng. Elétrica | UPF | Área Automação & Controle
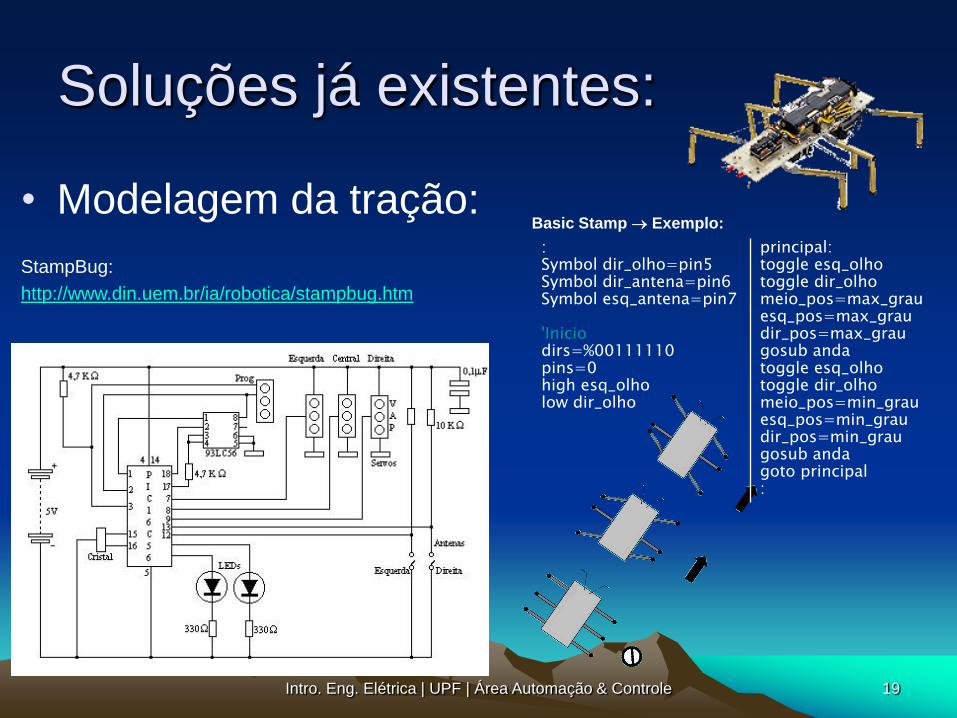
Soluções já existentes:
• Modelagem da tração:
StampBug:
http://www.din.uem.br/ia/robotica/stampbug.htm
Basic Stamp Exemplo:
:Symbol dir_olho=pin5Symbol dir_antena=pin6Symbol esq_antena=pin7
'Iniciodirs=%00111110pins=0high esq_olholow dir_olho
principal:toggle esq_olhotoggle dir_olhomeio_pos=max_grauesq_pos=max_graudir_pos=max_graugosub andatoggle esq_olhotoggle dir_olhomeio_pos=min_grauesq_pos=min_graudir_pos=min_graugosub andagoto principal:
19Intro. Eng. Elétrica | UPF | Área Automação & Controle
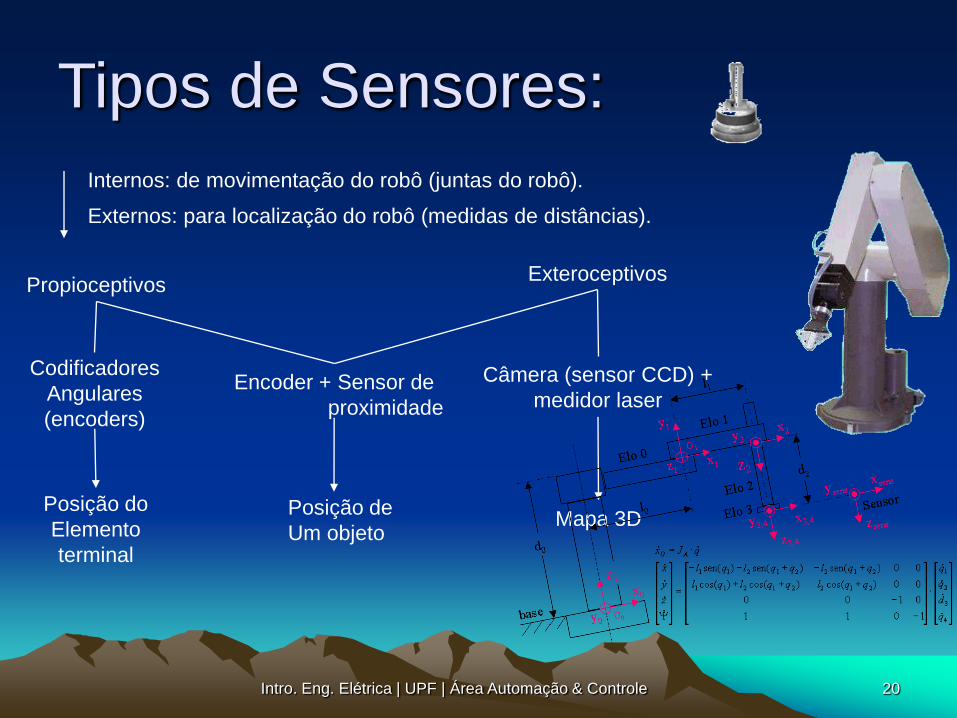
Internos: de movimentação do robô (juntas do robô).
Externos: para localização do robô (medidas de distâncias).
Tipos de Sensores:
PropioceptivosExteroceptivos
Codificadores
Angulares
(encoders)
Posição do
Elemento
terminal
Encoder + Sensor de
proximidade
Posição de
Um objeto
Câmera (sensor CCD) +
medidor laser
Mapa 3D
20Intro. Eng. Elétrica | UPF | Área Automação & Controle
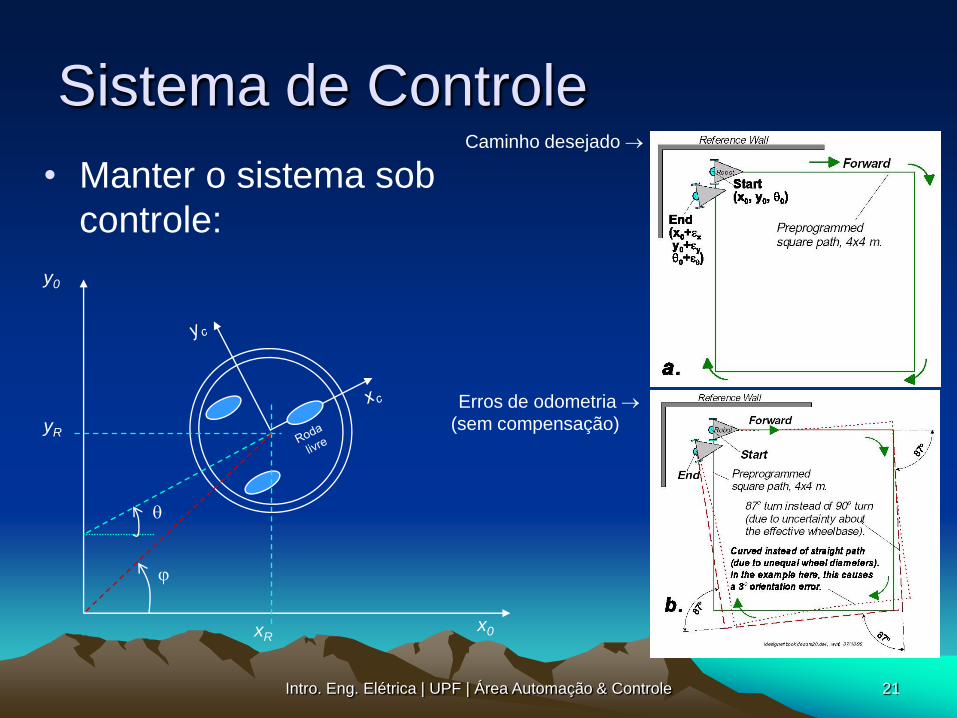
Sistema de Controle
• Manter o sistema sob
controle:
x0
y0
xR
yR
Erros de odometria
(sem compensação)
Caminho desejado
21Intro. Eng. Elétrica | UPF | Área Automação & Controle
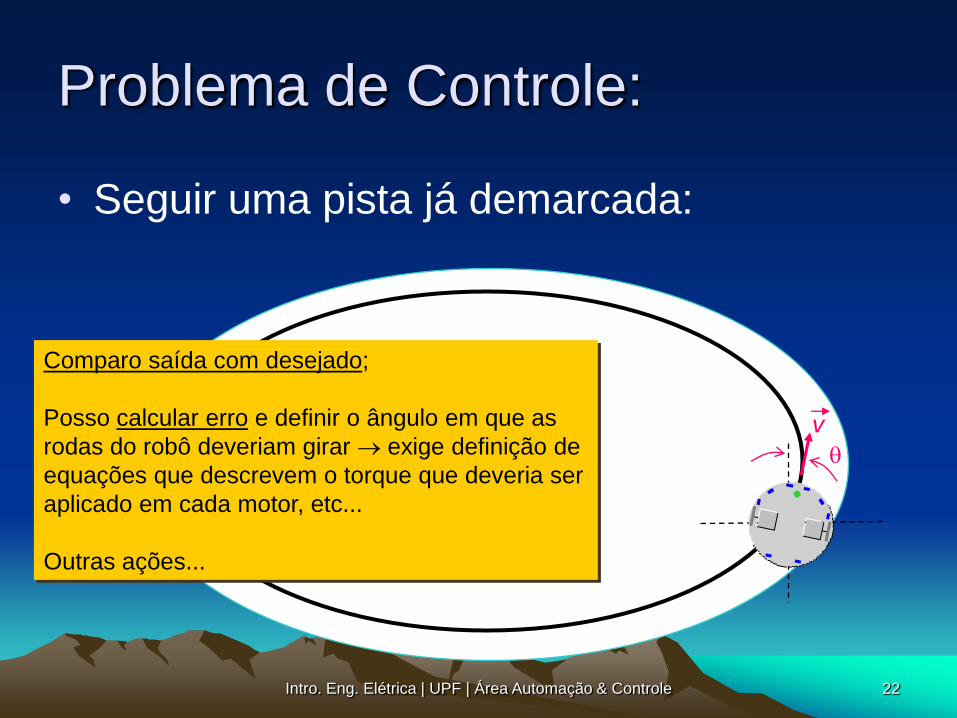
Problema de Controle:
• Seguir uma pista já demarcada:
v
Comparo saída com desejado;
Posso calcular erro e definir o ângulo em que as
rodas do robô deveriam girar exige definição de
equações que descrevem o torque que deveria ser
aplicado em cada motor, etc...
Outras ações...
22Intro. Eng. Elétrica | UPF | Área Automação & Controle

Descrição do Kit:
• 3 partes principais(decompondo o bloco RCX):
– 1) Entradas: portas 1, 2 e 3• Sensores (toque, luz);
– 2) Processamento:• Software rodando: o que dá
“inteligência” ao sistema.
– 3) Saídas: portas A, B e C• Motores, lâmpadas, tocar música, etc.
?
23Intro. Eng. Elétrica | UPF | Área Automação & Controle
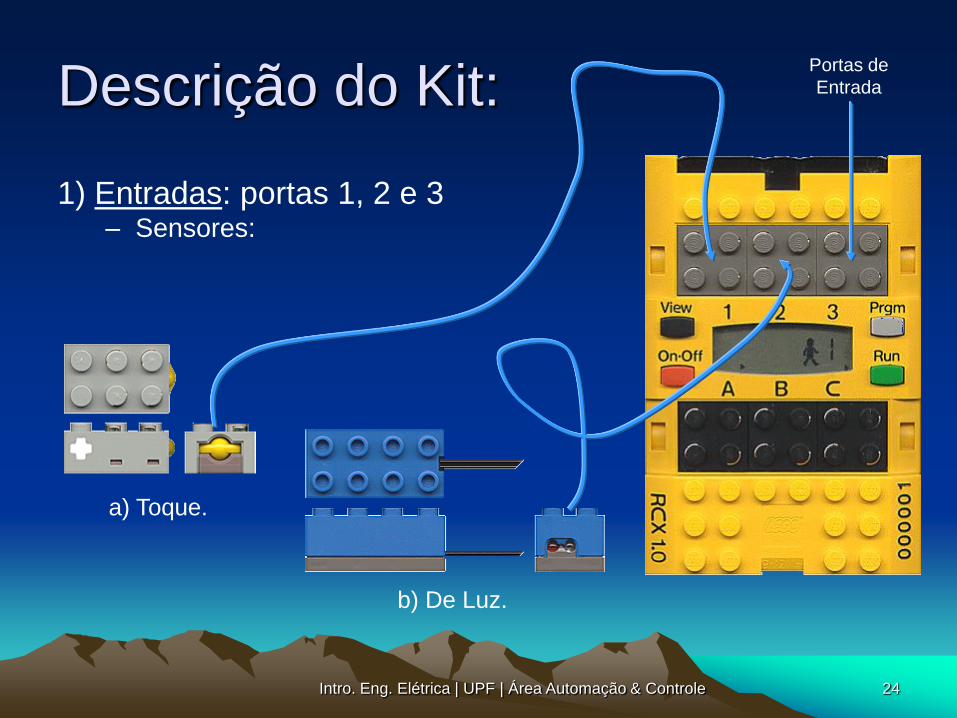
Descrição do Kit:
1) Entradas: portas 1, 2 e 3– Sensores:
?
a) Toque.
b) De Luz.
Portas de
Entrada
24Intro. Eng. Elétrica | UPF | Área Automação & Controle
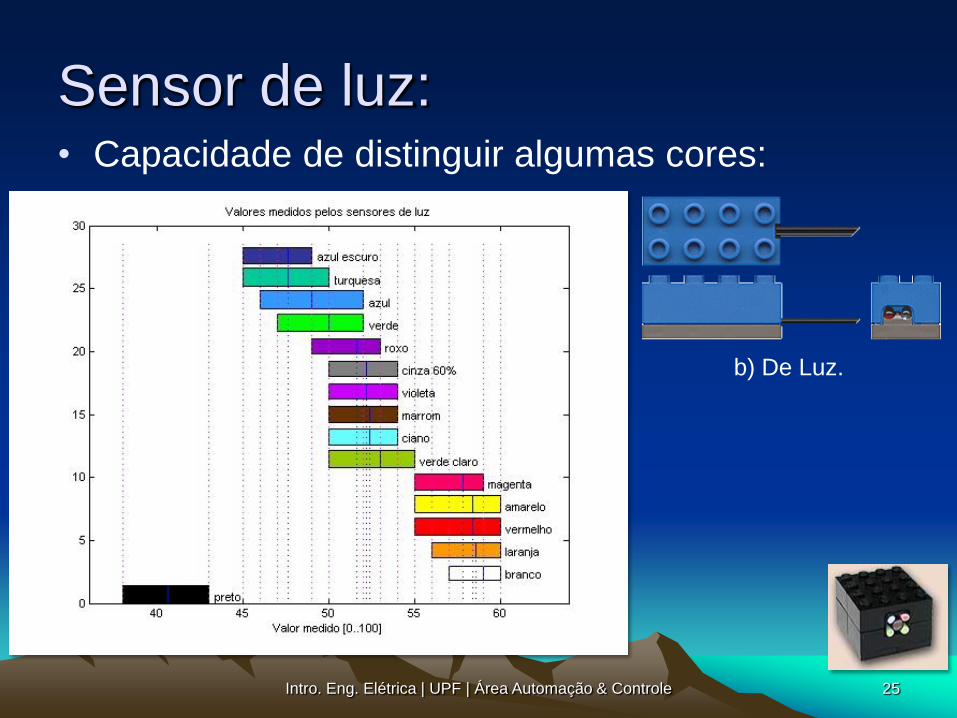
Sensor de luz:• Capacidade de distinguir algumas cores:
Intro. Eng. Elétrica | UPF | Área Automação & Controle 25
b) De Luz.
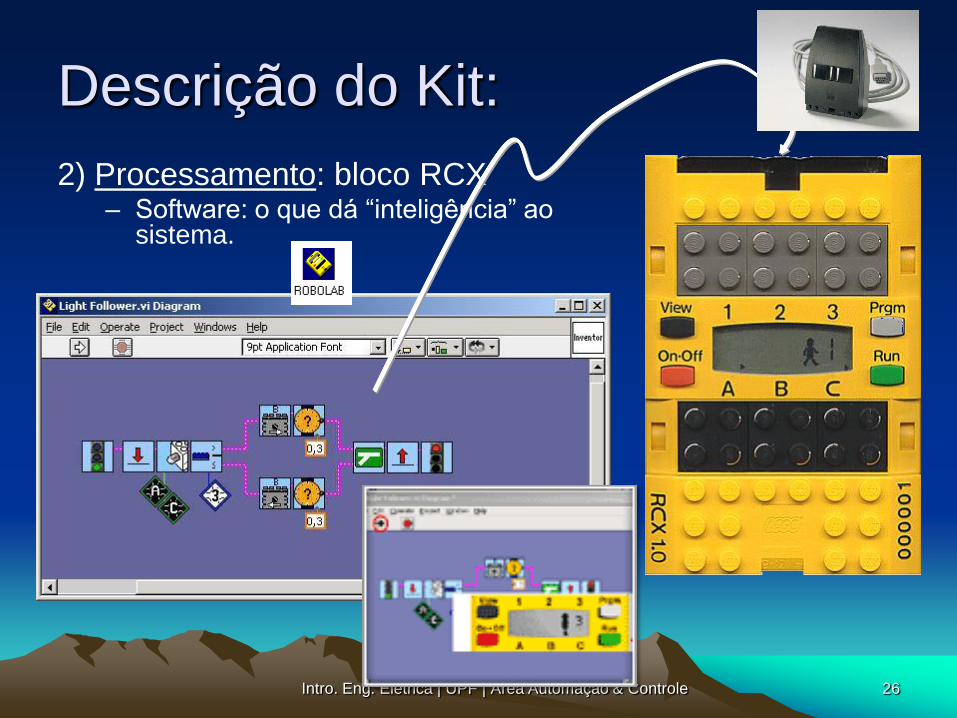
Descrição do Kit:
2) Processamento: bloco RCX– Software: o que dá “inteligência” ao
sistema.
?
26Intro. Eng. Elétrica | UPF | Área Automação & Controle

Descrição do Kit:
?
3) Saídas: portas A, B e C
– Motores, lâmpadas, tocar música, etc.
27Intro. Eng. Elétrica | UPF | Área Automação & Controle
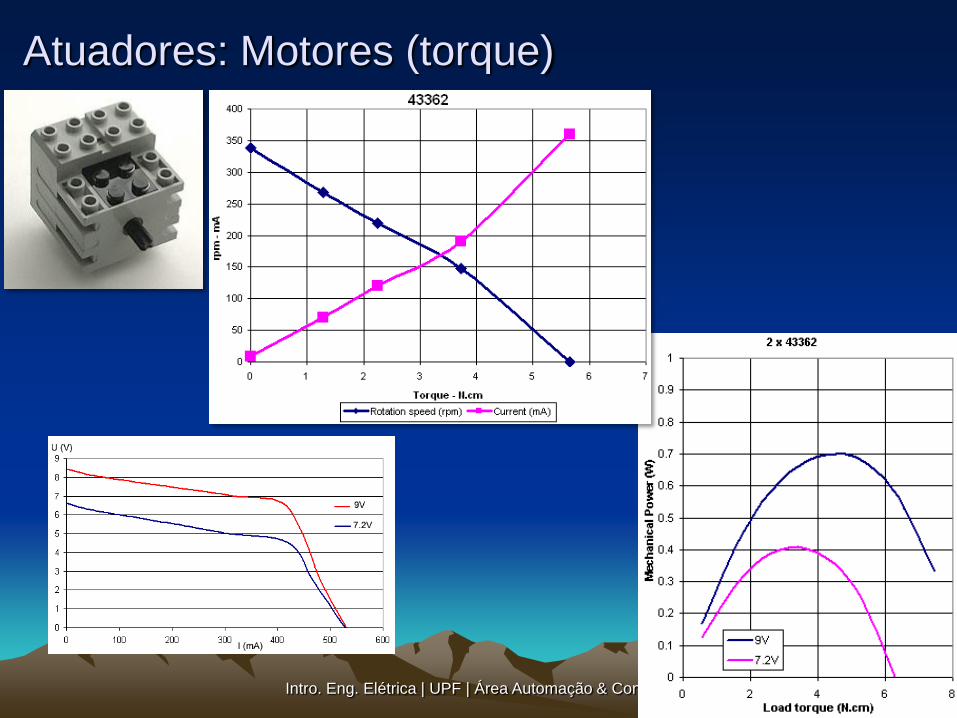
Atuadores: Motores (torque)
Intro. Eng. Elétrica | UPF | Área Automação & Controle 28
Programação do Kit:
• Linguagem gráfica baseada em ícones:
“ROBOLAB”
29Intro. Eng. Elétrica | UPF | Área Automação & Controle
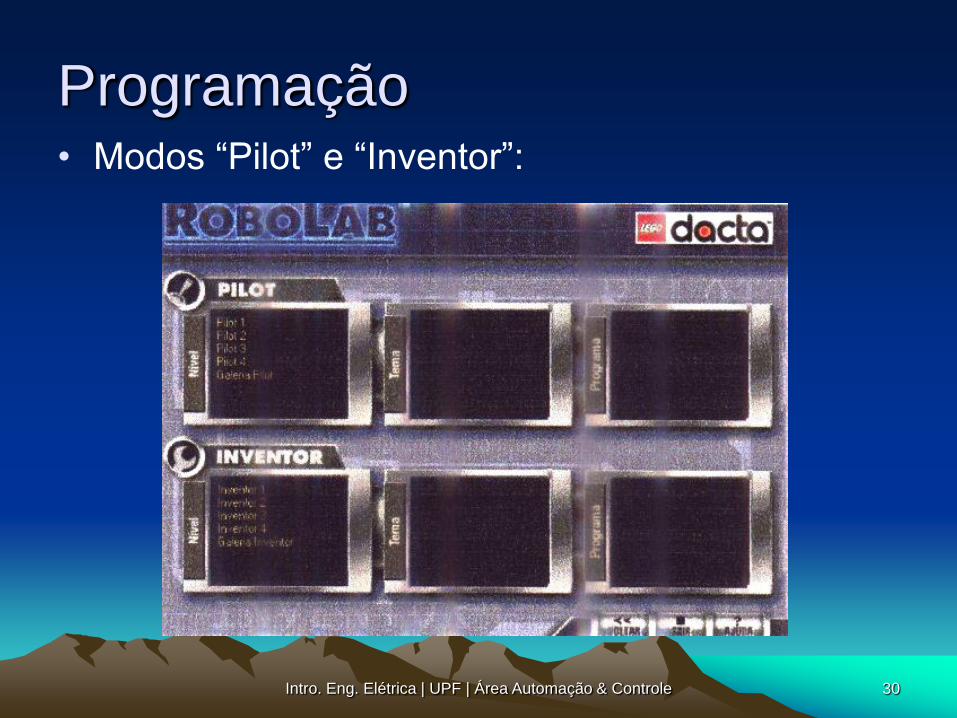
Programação• Modos “Pilot” e “Inventor”:
30Intro. Eng. Elétrica | UPF | Área Automação & Controle
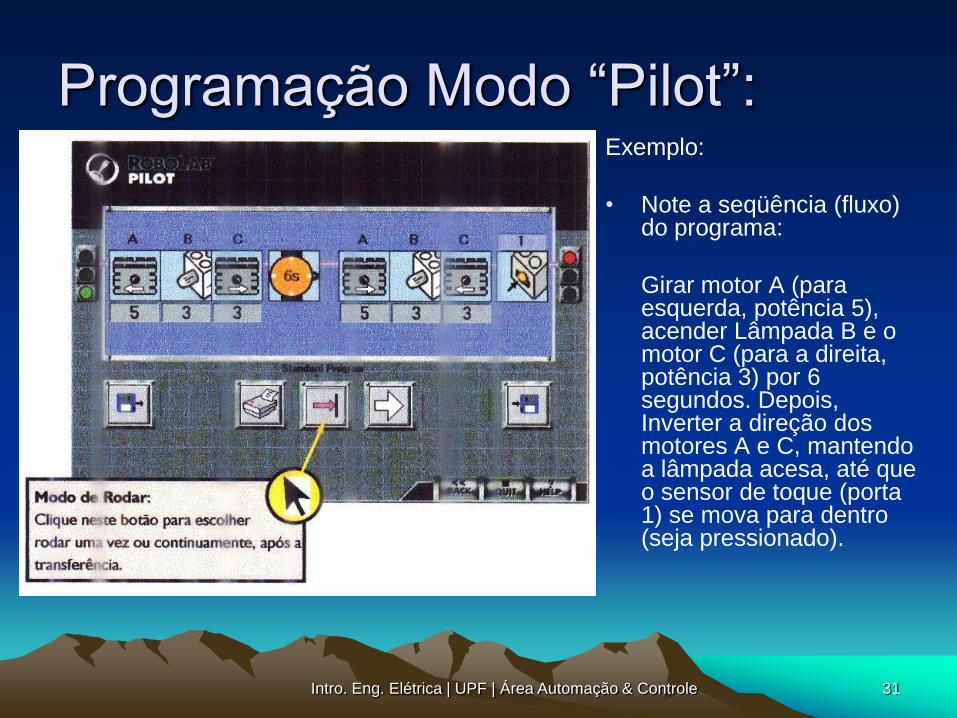
Programação Modo “Pilot”:Exemplo:
• Note a seqüência (fluxo) do programa:
Girar motor A (para esquerda, potência 5), acender Lâmpada B e o motor C (para a direita, potência 3) por 6 segundos. Depois, Inverter a direção dos motores A e C, mantendo a lâmpada acesa, até que o sensor de toque (porta 1) se mova para dentro (seja pressionado).
31Intro. Eng. Elétrica | UPF | Área Automação & Controle

Programação Modo “Inventor”:
Início
FimInício e Fim
do programa
32Intro. Eng. Elétrica | UPF | Área Automação & Controle
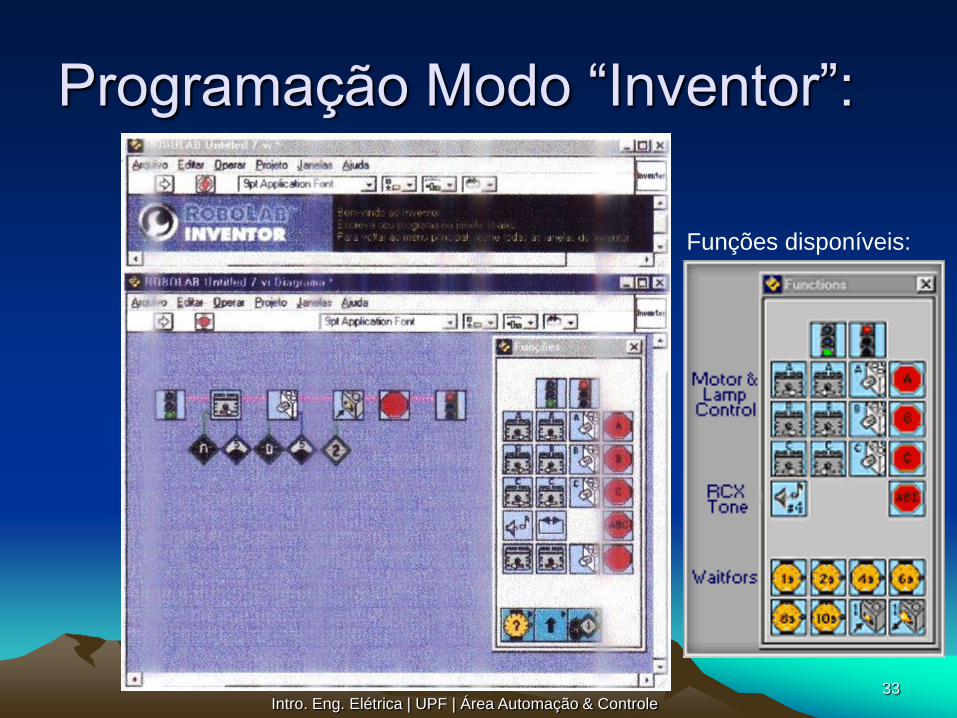
Programação Modo “Inventor”:
Funções disponíveis:
33Intro. Eng. Elétrica | UPF | Área Automação & Controle
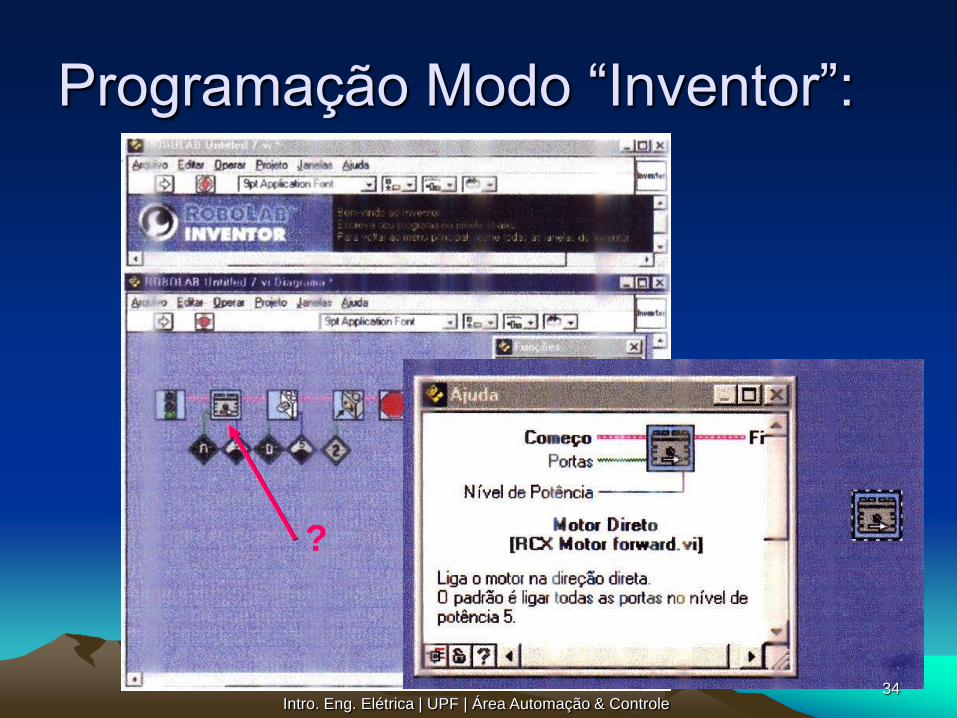
Programação Modo “Inventor”:
?
34Intro. Eng. Elétrica | UPF | Área Automação & Controle
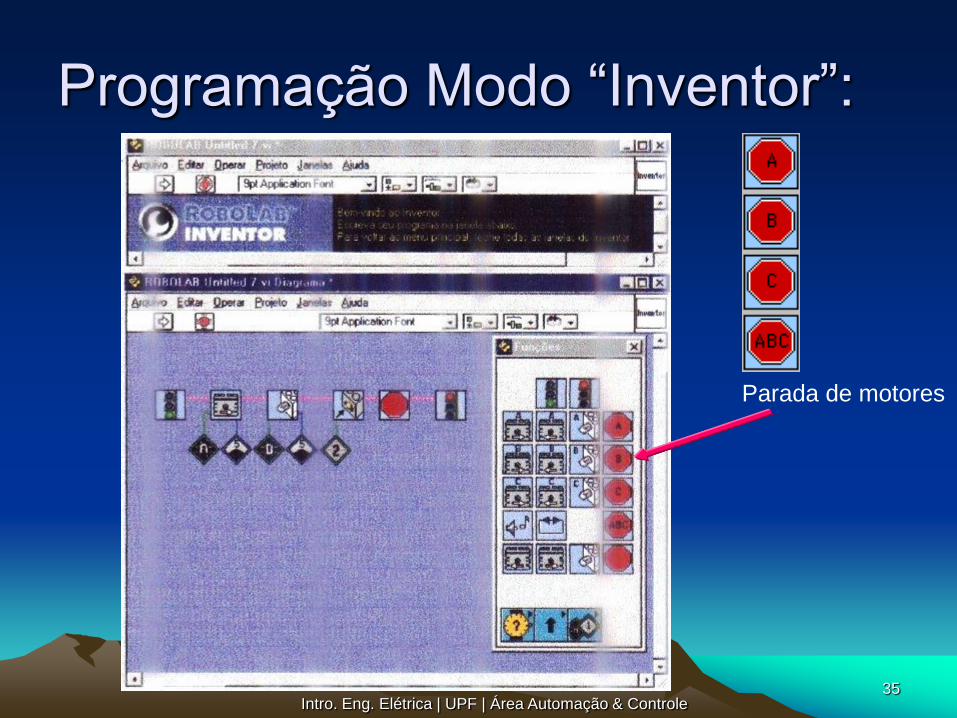
Programação Modo “Inventor”:
Parada de motores
35Intro. Eng. Elétrica | UPF | Área Automação & Controle
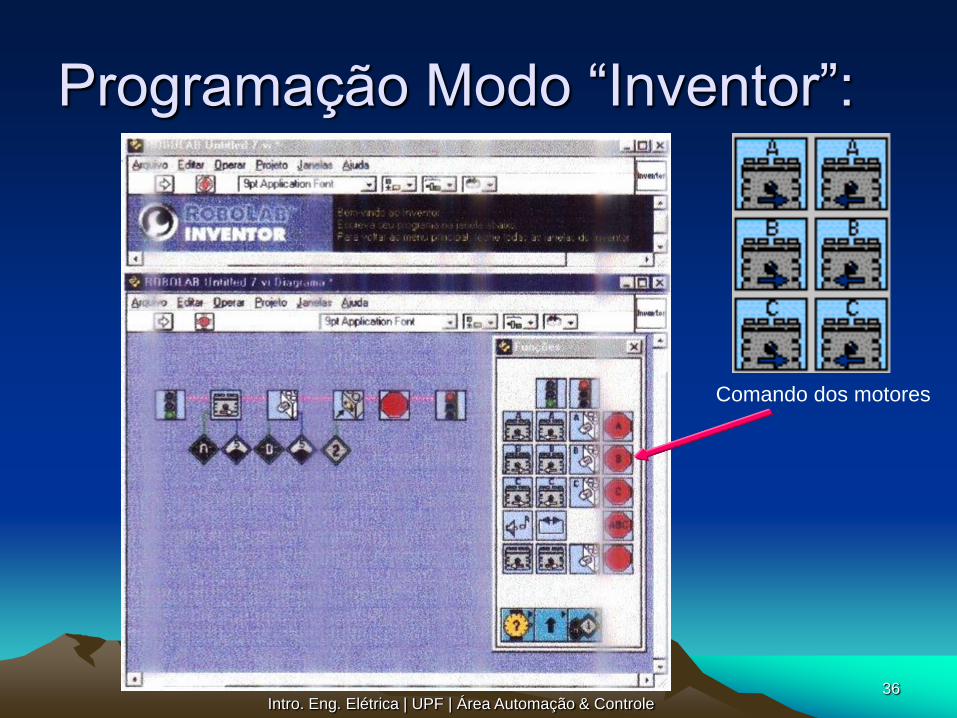
Programação Modo “Inventor”:
Comando dos motores
36Intro. Eng. Elétrica | UPF | Área Automação & Controle

Programação Modo “Inventor”:
Potência do motor
Porta de entrada
37Intro. Eng. Elétrica | UPF | Área Automação & Controle
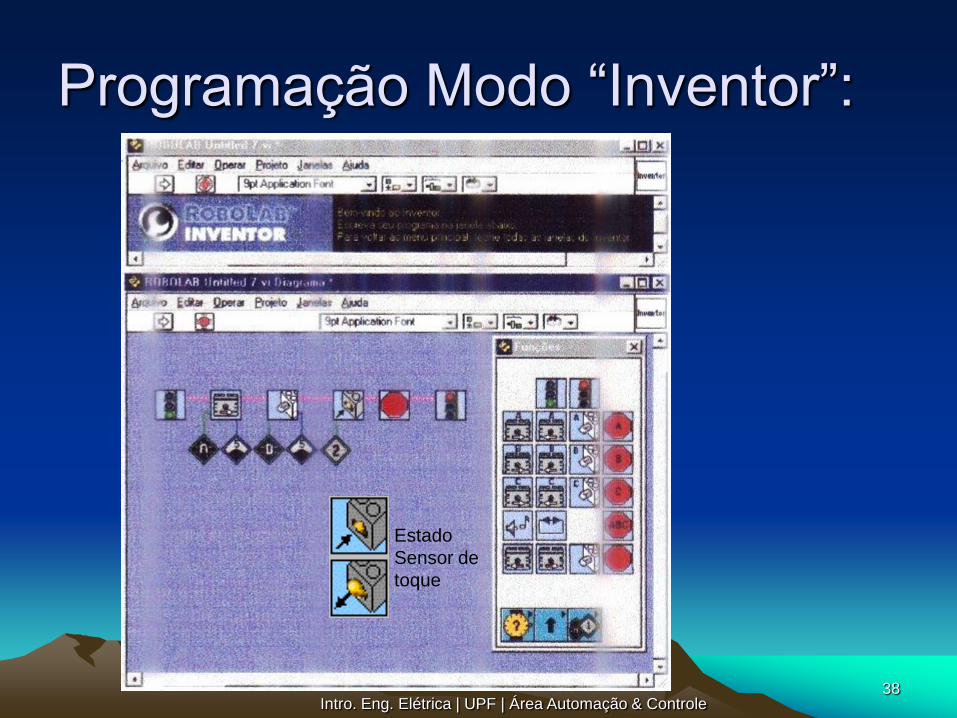
Programação Modo “Inventor”:
Estado
Sensor de
toque
38Intro. Eng. Elétrica | UPF | Área Automação & Controle

Programação Modo “Inventor”:
Estado
Sensor de
luz
39Intro. Eng. Elétrica | UPF | Área Automação & Controle
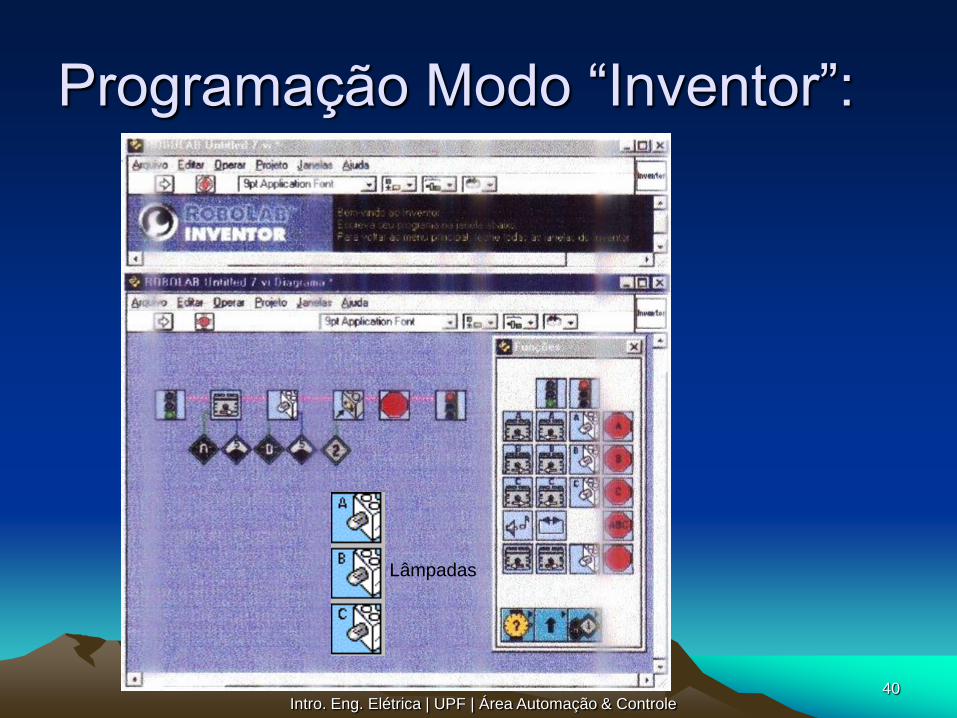
Programação Modo “Inventor”:
Lâmpadas
40Intro. Eng. Elétrica | UPF | Área Automação & Controle

Programação Modo “Inventor”:
Temporizadores
41Intro. Eng. Elétrica | UPF | Área Automação & Controle

Programação Modo “Inventor”:
Programação de melodias...
Notas musicais...
42Intro. Eng. Elétrica | UPF | Área Automação & Controle
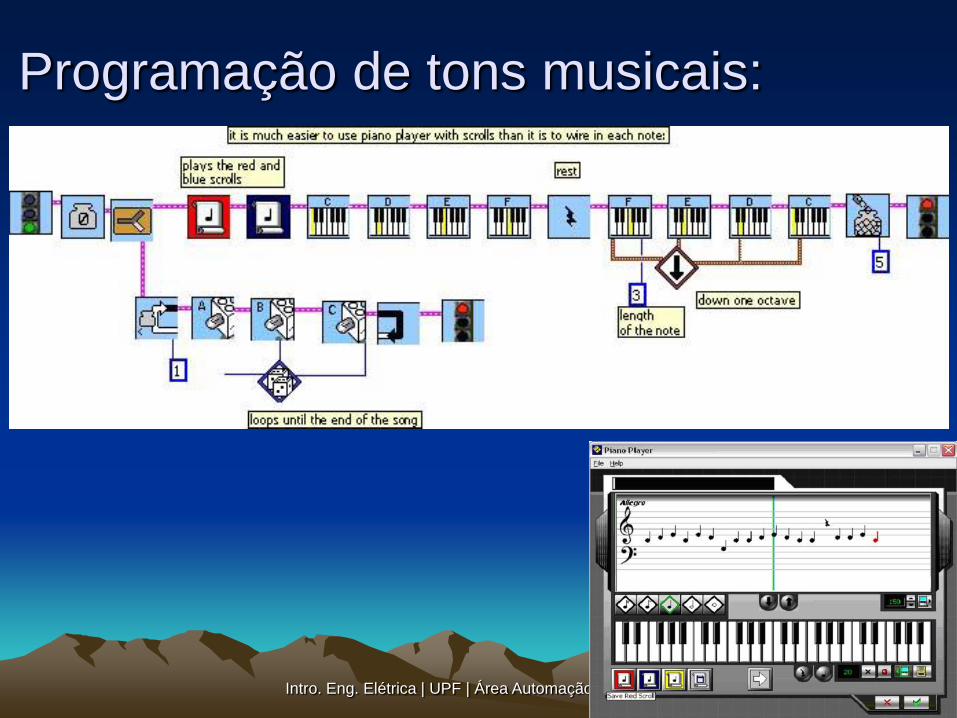
Programação de tons musicais:
Intro. Eng. Elétrica | UPF | Área Automação & Controle 43
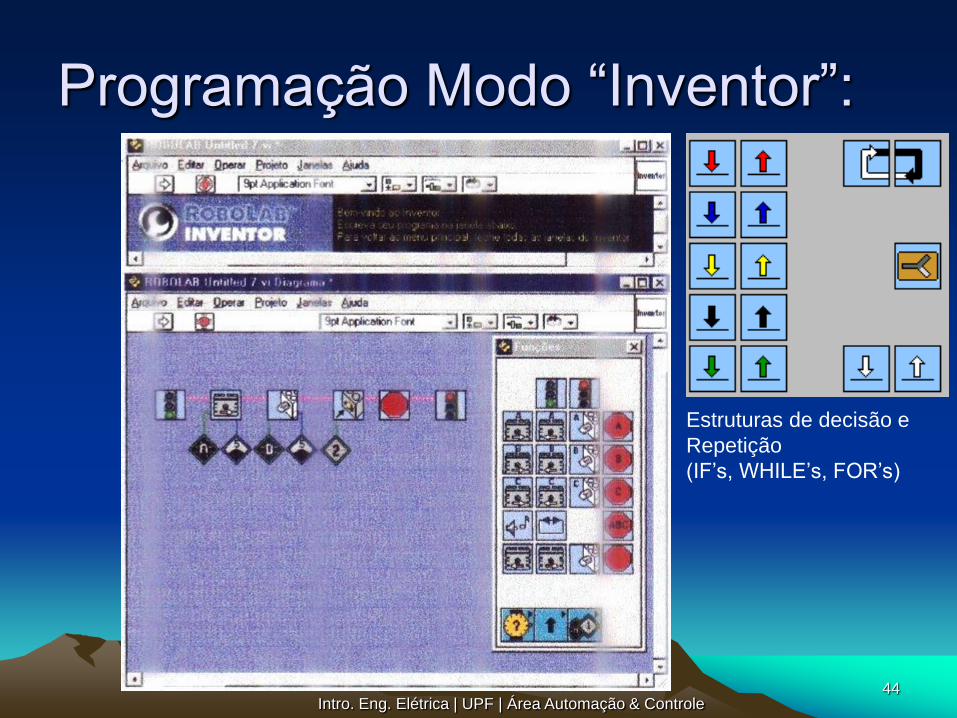
Programação Modo “Inventor”:
Estruturas de decisão e
Repetição
(IF’s, WHILE’s, FOR’s)
44Intro. Eng. Elétrica | UPF | Área Automação & Controle
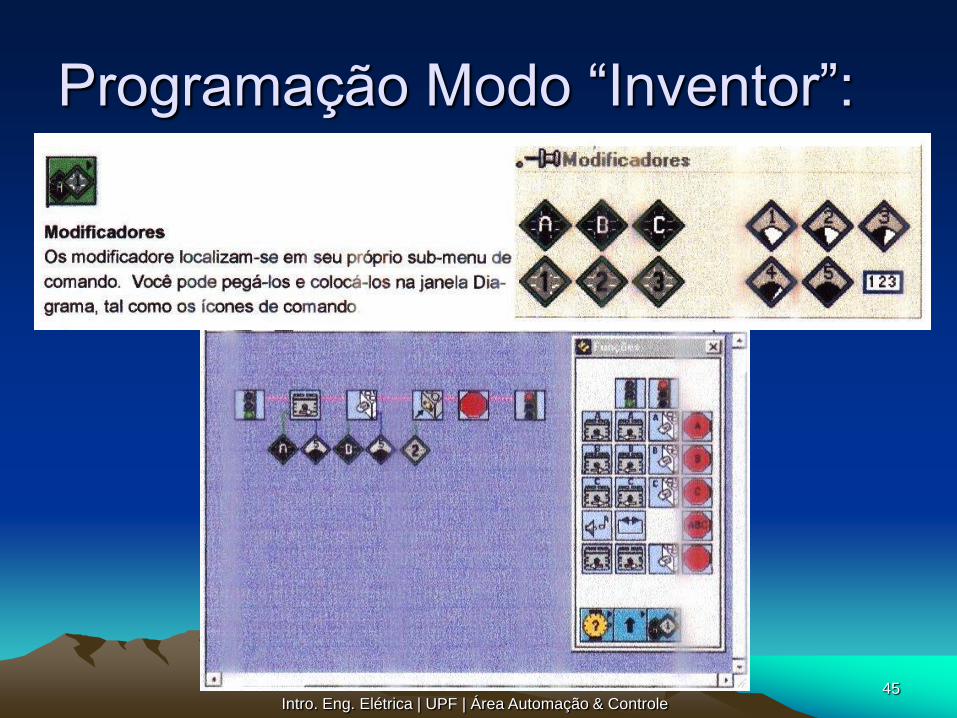
Programação Modo “Inventor”:
45Intro. Eng. Elétrica | UPF | Área Automação & Controle
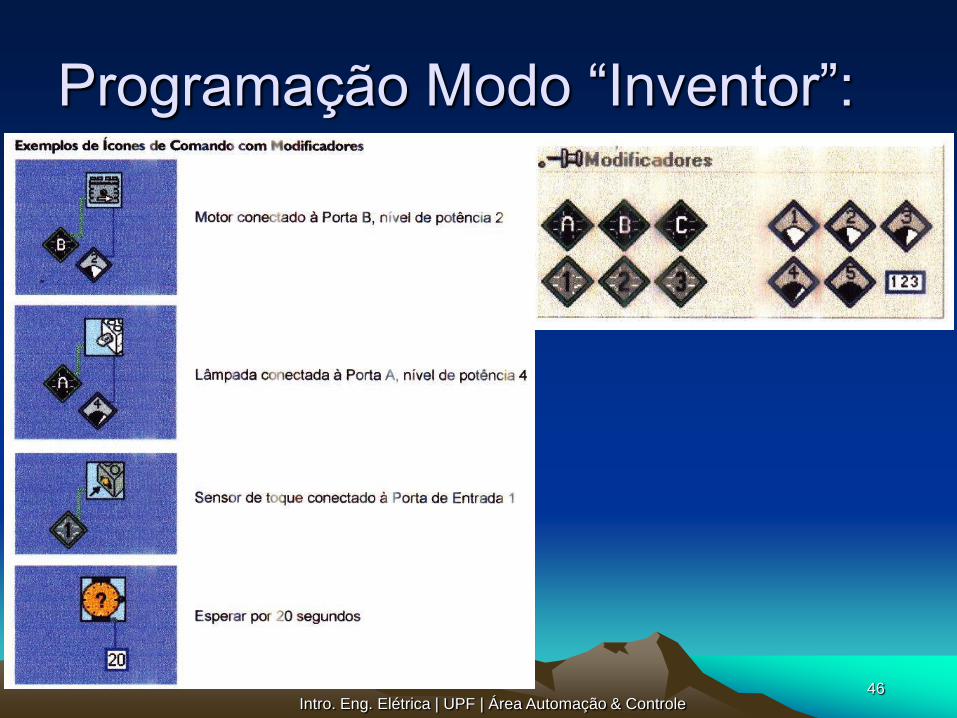
Programação Modo “Inventor”:
46Intro. Eng. Elétrica | UPF | Área Automação & Controle
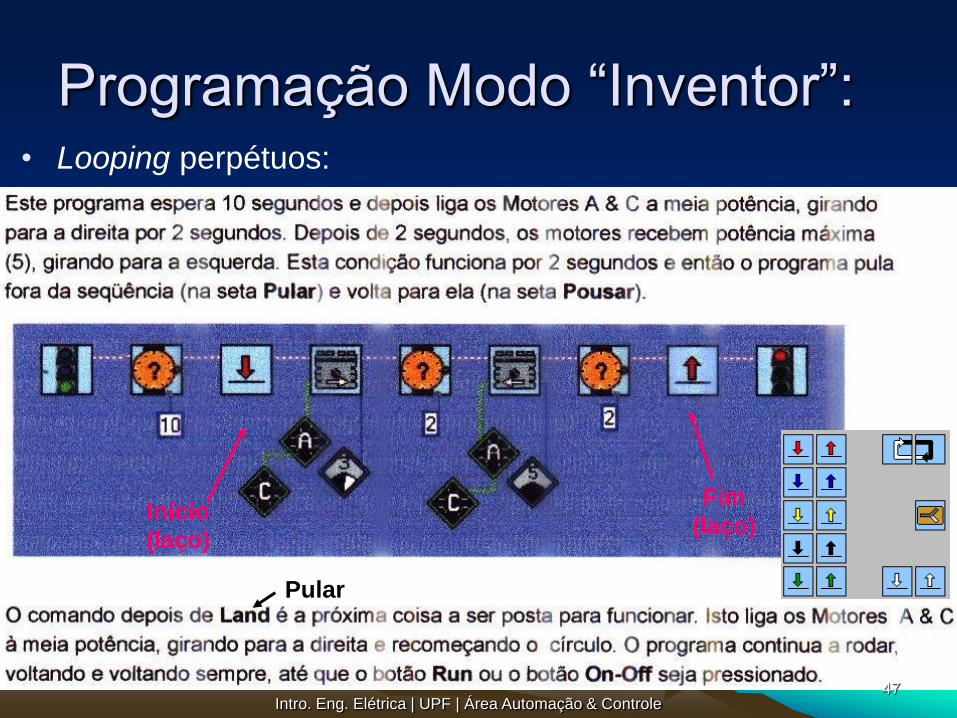
Programação Modo “Inventor”:• Looping perpétuos:
Pular
Início
(laço)
Fim
(laço)
47Intro. Eng. Elétrica | UPF | Área Automação & Controle
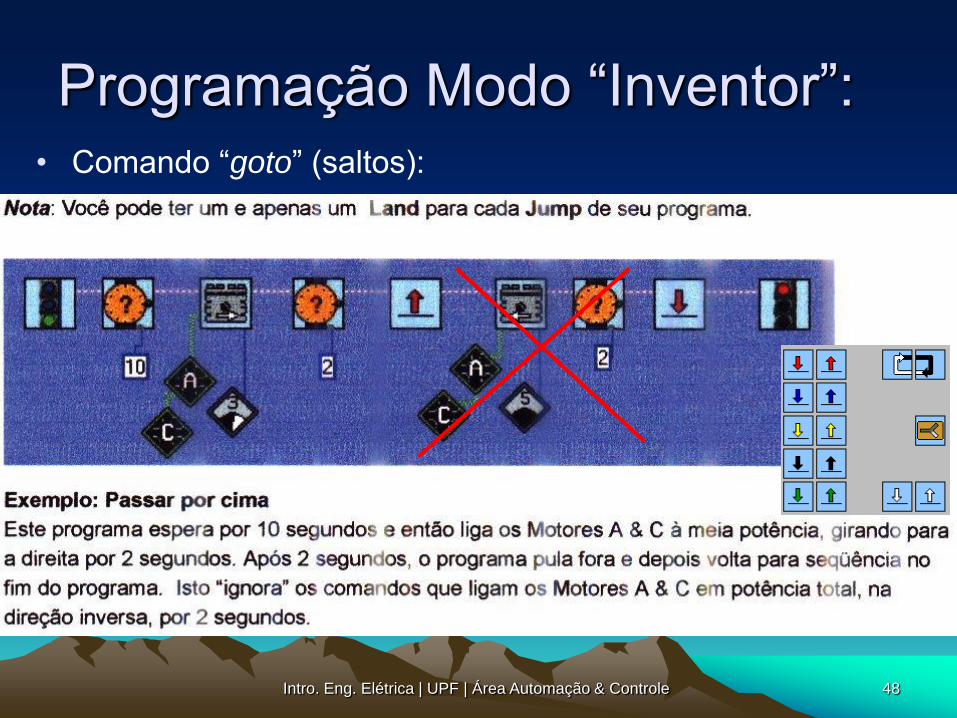
Programação Modo “Inventor”:• Comando “goto” (saltos):
48Intro. Eng. Elétrica | UPF | Área Automação & Controle
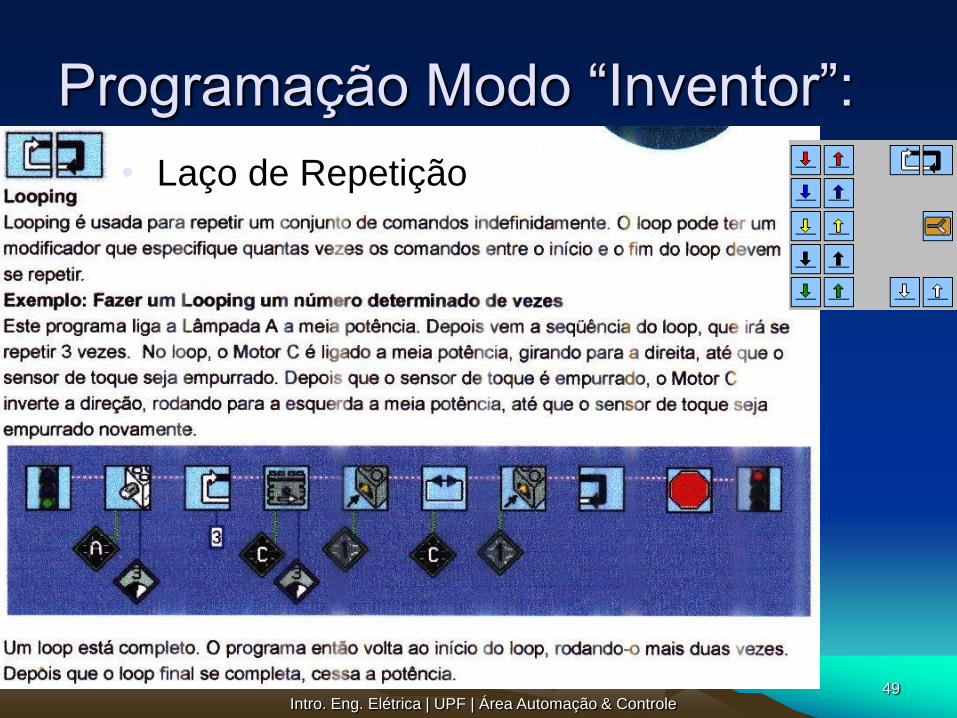
Programação Modo “Inventor”:
• Laço de Repetição
49Intro. Eng. Elétrica | UPF | Área Automação & Controle
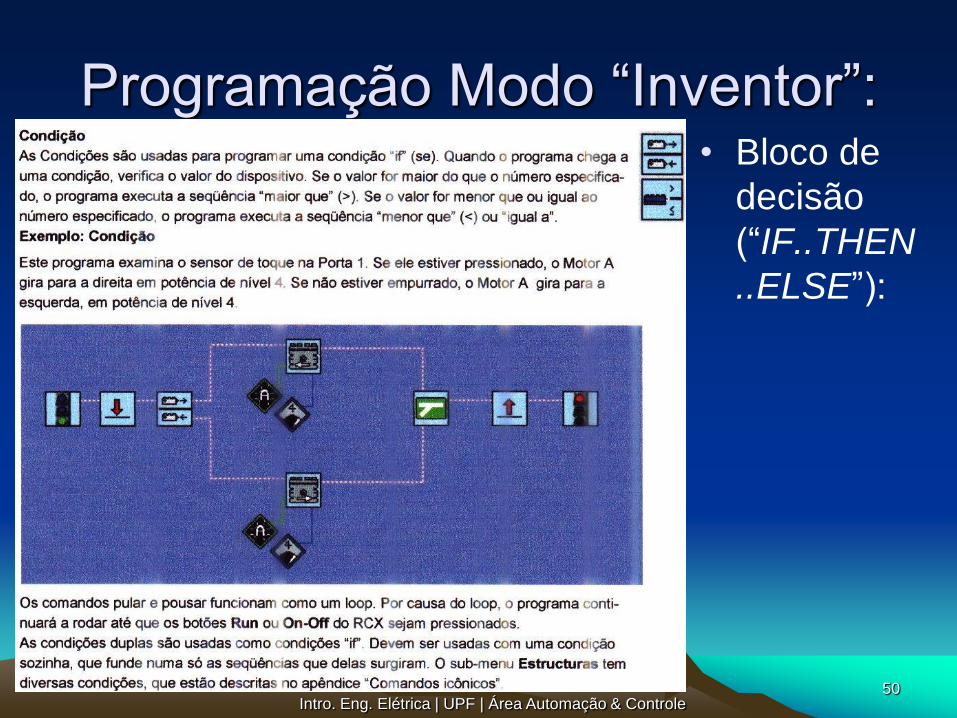
Programação Modo “Inventor”:• Bloco de
decisão
(“IF..THEN
..ELSE”):
50Intro. Eng. Elétrica | UPF | Área Automação & Controle
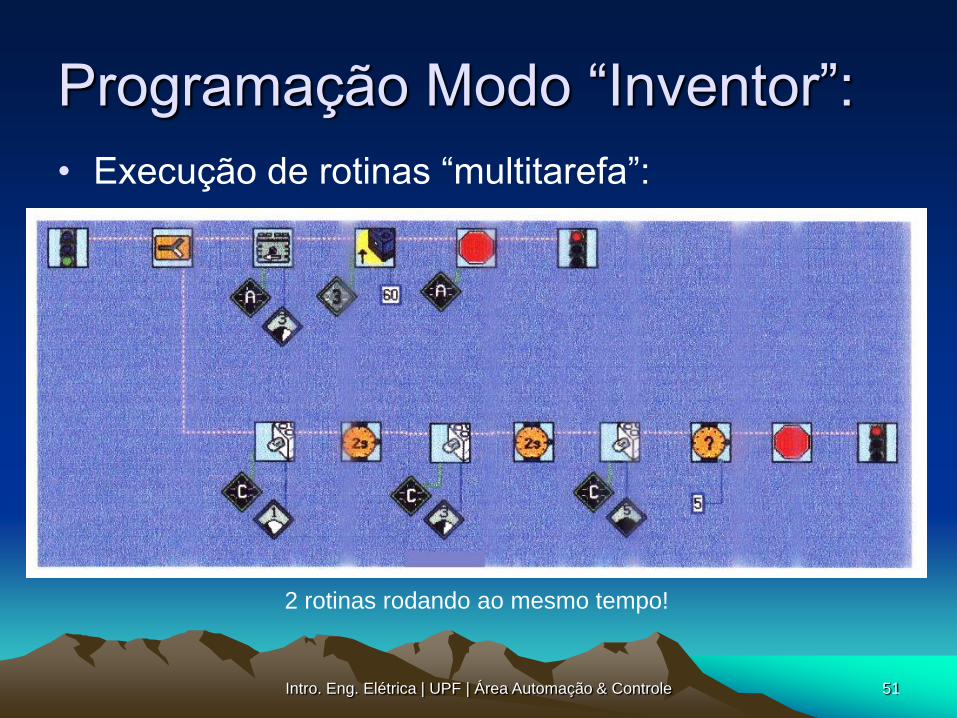
Programação Modo “Inventor”:
• Execução de rotinas “multitarefa”:
2 rotinas rodando ao mesmo tempo!
51Intro. Eng. Elétrica | UPF | Área Automação & Controle
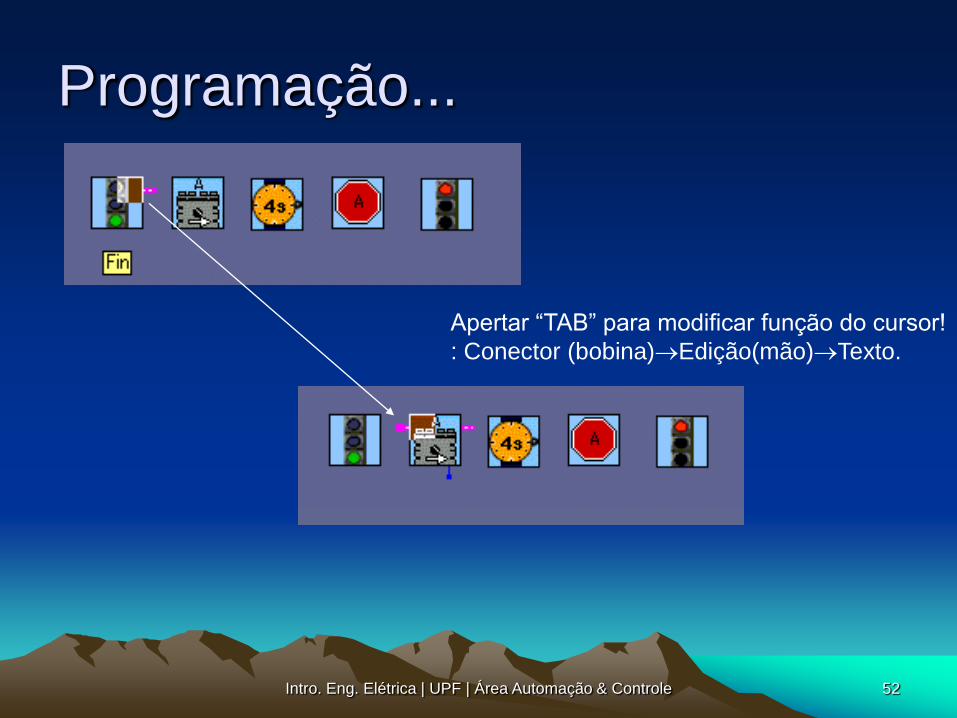
Programação...
Apertar “TAB” para modificar função do cursor!
: Conector (bobina)Edição(mão)Texto.
52Intro. Eng. Elétrica | UPF | Área Automação & Controle
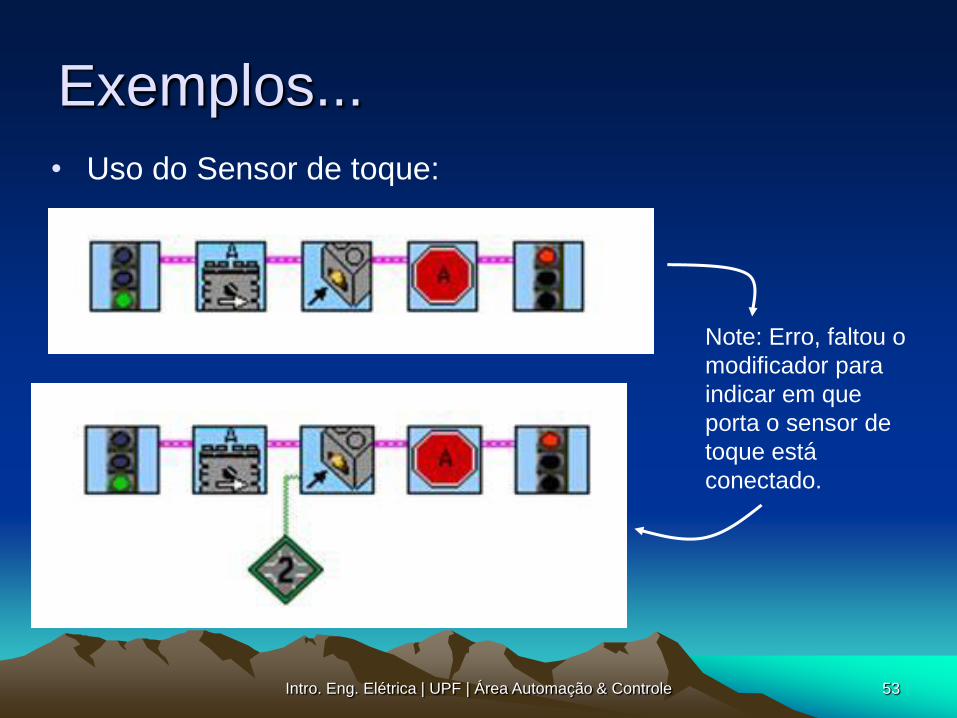
Exemplos...
• Uso do Sensor de toque:
Note: Erro, faltou o
modificador para
indicar em que
porta o sensor de
toque está
conectado.
53Intro. Eng. Elétrica | UPF | Área Automação & Controle
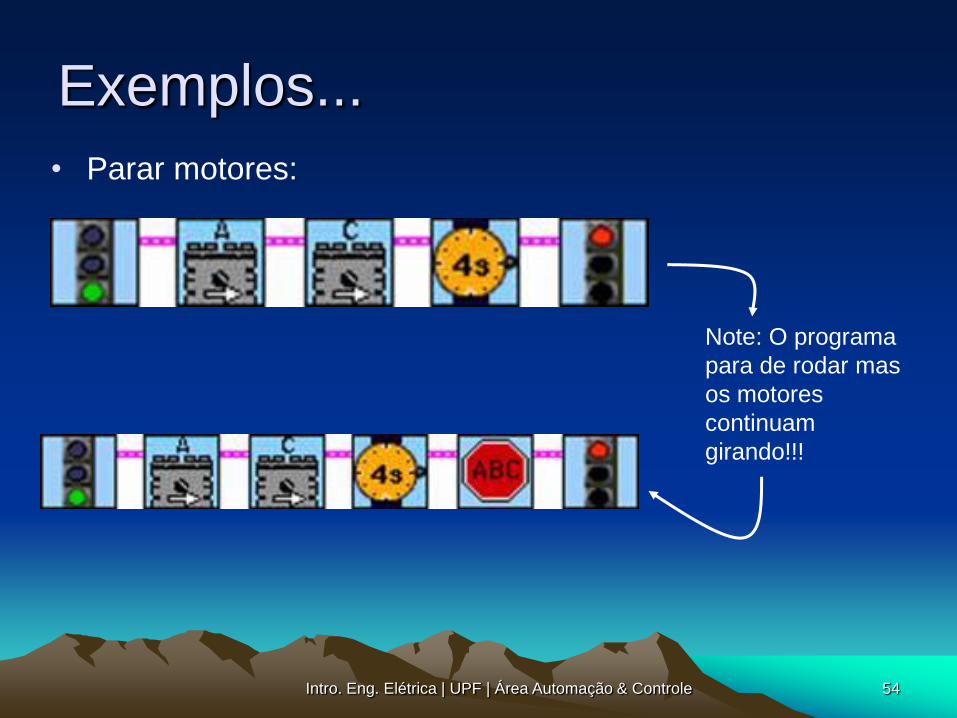
Exemplos...
• Parar motores:
Note: O programa
para de rodar mas
os motores
continuam
girando!!!
54Intro. Eng. Elétrica | UPF | Área Automação & Controle
Regras Uso dos Kits:
• Sempre(!) testar no solo! NUNCA sobre as mesas
(perigo de danos “irreversíveis” ao bloco RCX
principalmente);
• Cada equipe: organizar (manter) suas próprias peças.
Não se permite empréstimo de componentes entre
equipes!
• Final de cada aula: cada equipe é responsável pelo seu
kit e (volta da) organização da sala.
• Advertências;
• “Punição”: uso do ki suspenso por 1 semana!
Intro. Eng. Elétrica | UPF | Área Automação & Controle 55
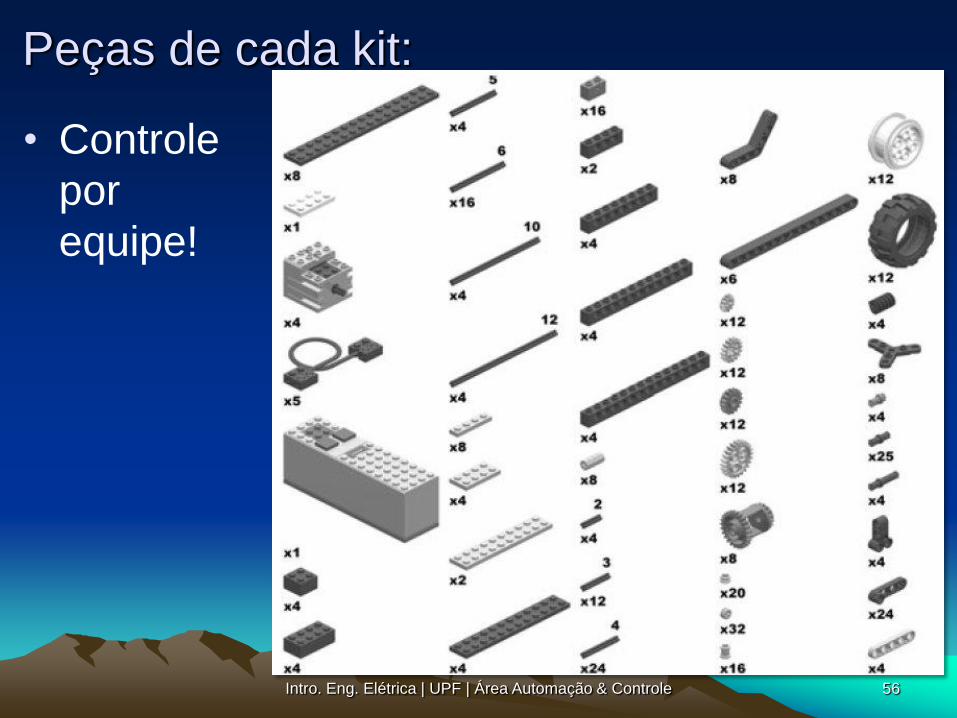
Peças de cada kit:
• Controle
por
equipe!
Intro. Eng. Elétrica | UPF | Área Automação & Controle 56

Exemplos...• Usando temporizador + display do LEGO:
O bloco da exposição de RCX, encontrado na caixa de funções: "comunicações RCX“. É uma boa maneira de
ver que dados estão circulando por dentro do RCX. Pode ser usado para mostrar valores do “container” ou do
sensor, e mesmo do temporizador interno do RCX. O programa acima é para um cronômetro simples. Usa um
sensor do toque para disparar e parar o cronômetro, e outro zerá-lo.
Este programa espera o sensor 1 de toque ser pressionado, então zera o “container” e o temporizador. Em
seguida, um evento é disparado até que um toque ocorra no sensor 1 de toque. O valor do temporizador é
colocado no “container” amarelo e então mostrado no display do RCX. Os ícones de setas azuis atualizam a
tela com valores novos. O modificador "1" no bloco do display serve para indicar uso de 1 ponto decimal. O
RCX continuará a mostrar o valor do temporizador até que um novo evento seja provocado. Neste caso, a
visualizarão no display parará de ser atualizar. Quando o sensor 2 do toque é pressionado, o display será
zerado e o programa reiniciará.
57Intro. Eng. Elétrica | UPF | Área Automação & Controle
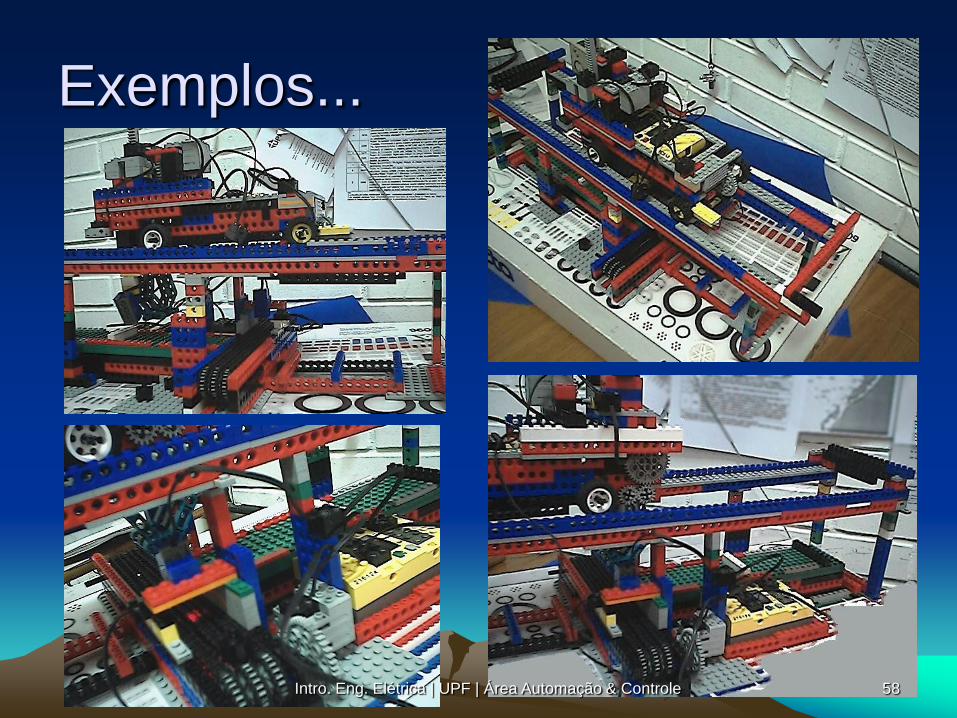
Exemplos...
58Intro. Eng. Elétrica | UPF | Área Automação & Controle
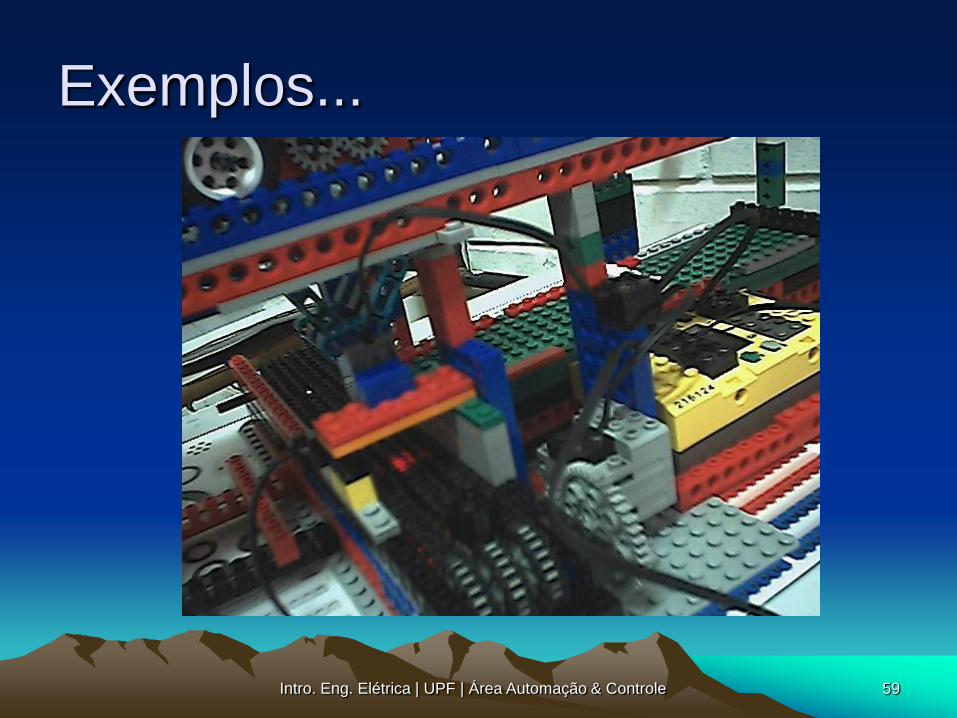
Exemplos...
59Intro. Eng. Elétrica | UPF | Área Automação & Controle
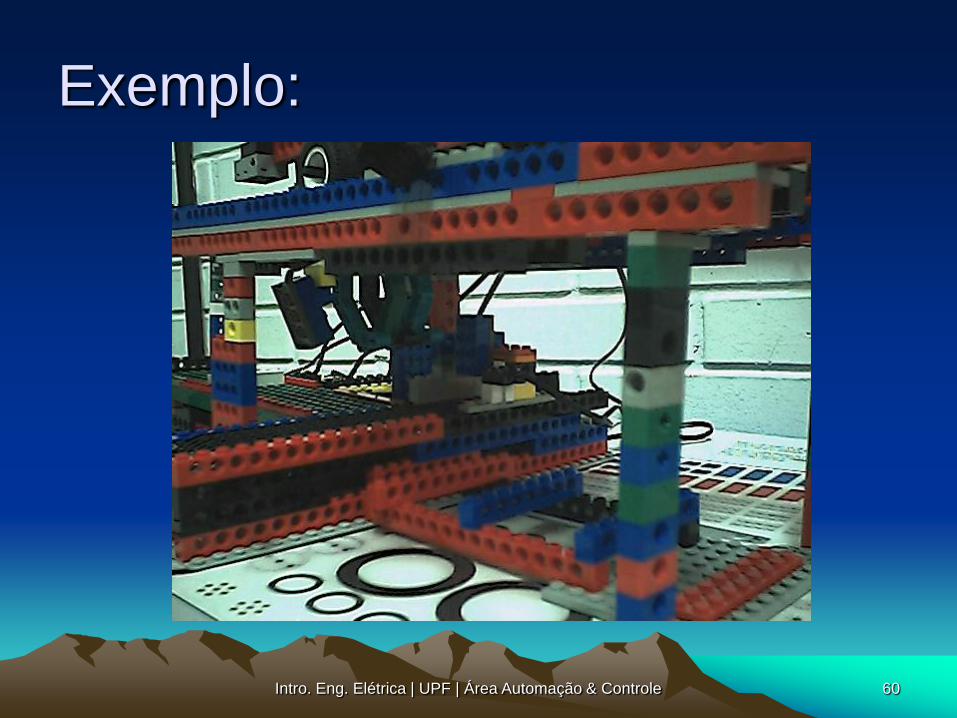
Exemplo:
60Intro. Eng. Elétrica | UPF | Área Automação & Controle
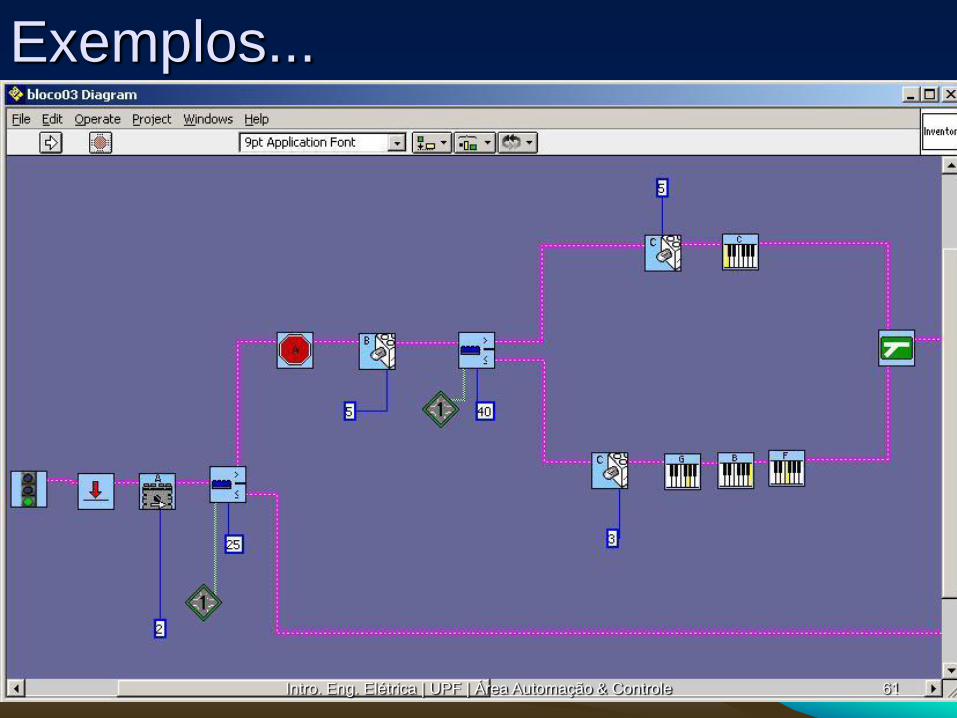
Exemplos...
61Intro. Eng. Elétrica | UPF | Área Automação & Controle
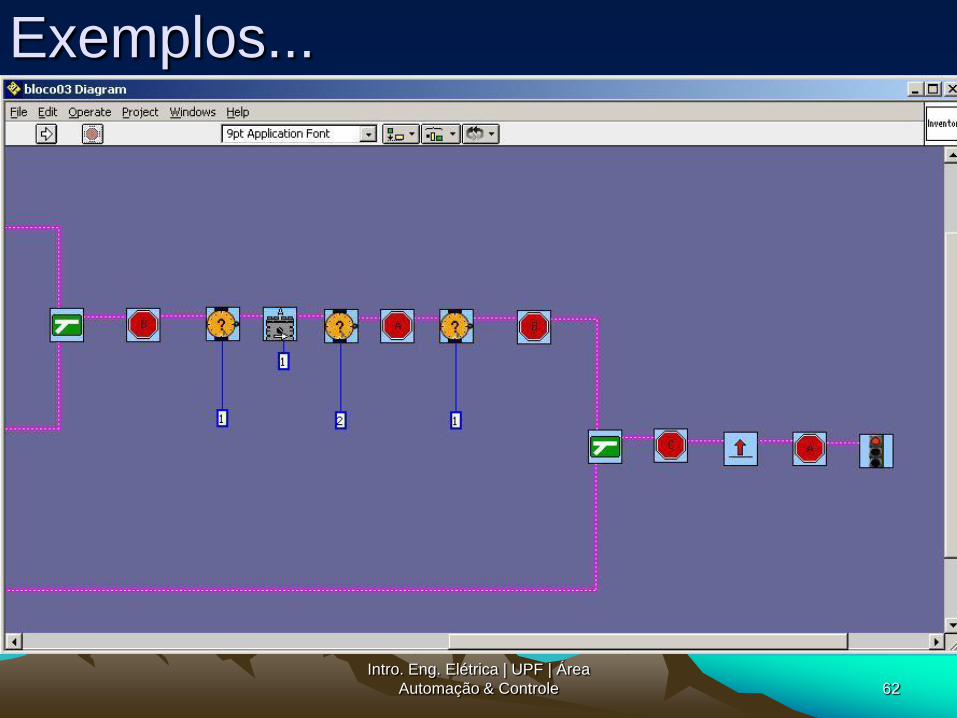
Exemplos...
62
Intro. Eng. Elétrica | UPF | Área
Automação & Controle
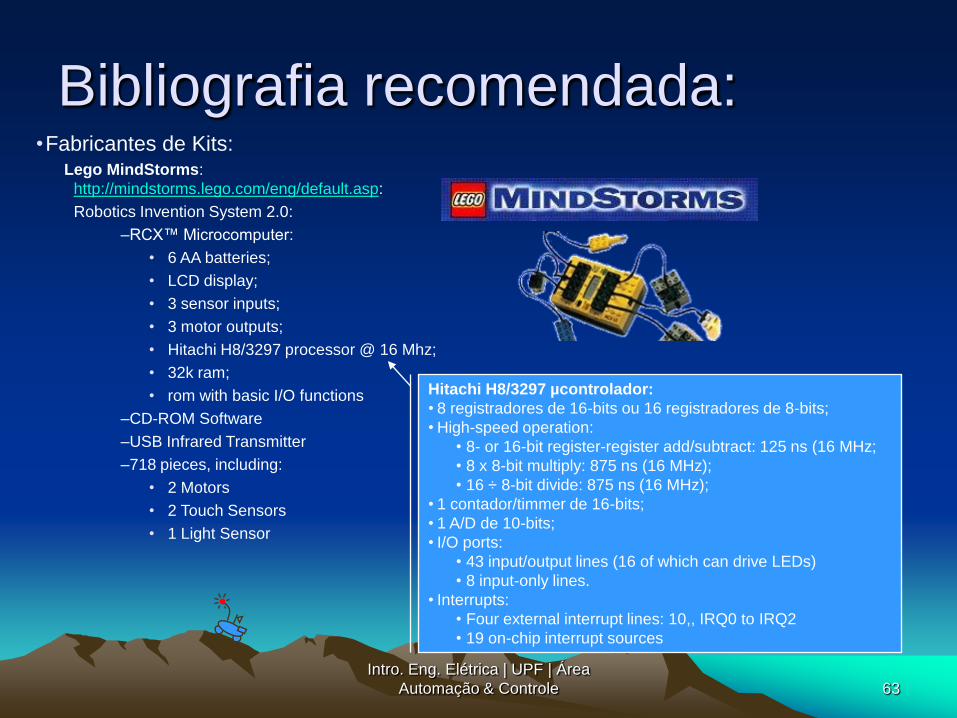
Bibliografia recomendada:•Fabricantes de Kits:
Lego MindStorms:
http://mindstorms.lego.com/eng/default.asp:
Robotics Invention System 2.0:
–RCX™ Microcomputer:
• 6 AA batteries;
• LCD display;
• 3 sensor inputs;
• 3 motor outputs;
• Hitachi H8/3297 processor @ 16 Mhz;
• 32k ram;
• rom with basic I/O functions
–CD-ROM Software
–USB Infrared Transmitter
–718 pieces, including:
• 2 Motors
• 2 Touch Sensors
• 1 Light Sensor
Hitachi H8/3297 µcontrolador:
• 8 registradores de 16-bits ou 16 registradores de 8-bits;
• High-speed operation:
• 8- or 16-bit register-register add/subtract: 125 ns (16 MHz;
• 8 x 8-bit multiply: 875 ns (16 MHz);
• 16 ÷ 8-bit divide: 875 ns (16 MHz);
• 1 contador/timmer de 16-bits;
• 1 A/D de 10-bits;
• I/O ports:
• 43 input/output lines (16 of which can drive LEDs)
• 8 input-only lines.
• Interrupts:
• Four external interrupt lines: 10,, IRQ0 to IRQ2
• 19 on-chip interrupt sources
63
Intro. Eng. Elétrica | UPF | Área
Automação & Controle