Embed Size (px)
Citation preview

Anexo 2 89
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
ANEXO 2
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
IInnttrroodduucccciióónn aa llaa pprrooggrraammaacciióónn
MMeellffaa BBaassiicc IIVV
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 11
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
PPrrooggrraammaacciióónn eessttrruuccttuurraaddaa
En este lenguaje la programación se estructura como un conjunto de instrucciones cuyo flujo de proceso se realiza en un lenguaje BASIC estándar.
El aspecto de un programa es un conjunto de instrucciones propias del sistema de Robot entre sentencias ya conocidas de BASIC.
Se obtiene así una forma intuitiva de programación sencilla, incluso para aquellos usuarios con pocos conocimientos de BASIC.
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 22

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
EEjjeemmpplloo ddee pprroogg... 10 DEF INTE VEL 12 VEL=50
15 OVRD VEL
20 FOR T= 0 TO 6
3300 MMVVSS PP11
4400 MMOOVV PP22
5500 MMVVSS PP44
6600 NNEEXXTT TT
7700 GGOOSSUUBB 11000000 75 HCLOSE 1
8800 MMOOVV PP77 85 OVRD 30
9900 MMVVSS PP99
9955 RREETTUURRNN
110000 GGOOTTOO 2200
11000000 MMOOVV PP33
11000055 DDLLYY 11
11220000 ......
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa
CCaarráácctteerreess ccoonn s
AAppóóssttrrooffee ((´́)) LLaass llíínneeaass ddee ccoommeennttaarriiooss eessttáttrraannssffeerriiddaass ttaammbbiiéénn aa llaa ddrriivvee
EEjjeemmpplloo:: 110000 ́́ ppoossiiccii
AAsstteerriissccoo ((**)) EEll aasstteerriissccoo ddeeffiinnee mmaarrccaass ddee
EEjjeemmpplloo:: 111100 **TTAABBLLA
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa
Anexo 2
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
ggrraammaa
SSeenntteenncciiaass pprrooppiiaass ddee BBAASSIICC
ppaarraa eell fflluujjoo yy ccoonnddiicciioonneess ddee
pprrooggrraammaa SSeenntteenncciiaass pprrooppiiaass ddee
MMEELLFFAA ppaarraa eell mmoovviimmiieennttoo
ddeell RRoobboott
33
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
ssiiggnniiffiiccaaddoo eessppeecciiaall
táánn iinnddiiccaaddaass ccoonn aappóóssttrrooffeess,, yy sseerráánn ee uunniitt..
iióónn ddee iinniicciioo
ee ssaallttoo ((eettiiqquueettaass)).. NNoo sseerráánn ttrraannssffeerriiddaass aa llaa ddrriivvee uunniitt
LAA11
44
90
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco

Anexo 2 91
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
CCaarráácctteerreess ccoonn ssiiggnniiffiiccaaddoo eessppeecciiaall((22))
CCoommaa ((,,)) LLaa ccoommaa ssiirrvvee ddee sseeppaarraaddoorr ccuuaannddoo ssee eessppeecciiffiiccaann mmuucchhooss ppaarráámmeettrrooss ccoonnsseeccuuttiivvooss..
EEjjeemmpplloo:: 110000 PP5500 == ((445500,,110000,,330000,, ......))
PPuunnttoo ((..)) PPaarraa ddaattooss mmúúllttiipplleess ,,ccoommoo llooss ddaattooss ppoossiicciioonnaalleess,, eell ppuunnttoo ssiirrvvee ccoommoo sseeppaarraaddoorr ddee ccaaddaa ccoommppoonneennttee ssiinngguullaarr..
EEjjeemmpplloo::
111100 MM1100 == PP1100..XX
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 55
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
CCaarráácctteerreess ccoonn ssiiggnniiffiiccaaddoo eessppeecciiaall ((33))
EEssppaacciioo (( ))
Debe guardarse entre instrucciones y datos individuales, y tras los números de línea
Ejemplo: 100 MOV P10
CCaaddaa llíínneeaa ddeebbee ccoonntteenneerr ccoommoo mmááxxiimmoo uunn ccoommaannddoo
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 66

Anexo 2 92
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn DDeeccllaarraacciióónn ddee vvaarriiaabblleess
Los nombres de variables del tipo de posición, articulación (joint), aritmética, y
cadena de caracteres , empiezan con un carácter particular.
La norma es:
P = Positional (variable de posición) J = Joint (articulaciones) M = Aritméticas
C = Character string (cadena de caracteres)
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 77
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
CCoonnssttaanntteess nnuumméérriiccaass
EEjjeemmppllooss::
ddeecciimmaall :: 223344,, 77447711,, --443355,, ++554466,, --55445544
hheexxaaddeecciimmaall :: &&HH0033FFAA,, &&HH11AAEE55,, &&HHAA55
bbiinnaarriioo :: &&BB00110011,, &&BB111100111100110011,, &&BB1100110011111111
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 88

Anexo 2 93
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
CCoonnssttaanntteess aallffaannuumméérriiccaass
EEjjeemmpplloo::
""MMEELLFFAA BBAASSIICC eess aallttaammeennttee eeffiicciieennttee""
““SSiigguuiieennttee ppoossiicciióónn""
““EEssppeerraannddoo eennttrraaddaa 55""
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 99
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
CCoonnssttaanntteess aanngguullaarreess
EEjjeemmpplloo::
9900DDEEGG
112200DDEEGG
EEll sseennoo ddee uunn áánnggúúlloo ddee 110000ºº
ssee rreepprreesseennttaa ccoommoo::
SSIINN((110000DDEEGG))
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 1100

Anexo 2 94
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
DDeeccllaarraacciióónn ddee vvaarriiaabblleess:: eejjeemmppllooss
Position P
Joint J
Arithmetic M
Character string C
P1 J100 M10 C30$
P124
P100.X
P110.Z
P[M5+3] (!)
P[M10].Z (!)
J100.W
J10.T
M99
M[M6+3] (!)
C$[M5+4] (!)
((!!)) SSóólloo eenn MMeellffaa BBaassiicc IIIIII
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 1111
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
EExxpprreessiioonneess ccoonn vvaarriiaabblleess ddee ttiippoo PPoossiicciioonnaall
EEjjeemmppllooss::
PP1144 == PP110000
PP2200 == PP__CCUURRRR
PP3300 == PP[[MM44**22++55]] ((!!))
PP55..ZZ == 1100**MM55
PP[[MM1100]] == PP11 ++ PP2200
PP1155..ZZ == PP1155..ZZ++3300
-Variables de Posición: Datos de coordenadas de espacio ortogonales, X, Y Z,( normalmente en mm) y orientación A, B. (en DEG) . Todas las variables de este tipo empiezan con P.
((!!)) SSóólloo eenn MMeellffaa BBaassiicc IIIIII
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 1122

Anexo 2 95
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
EExxpprreessiioonneess ccoonn vvaarriiaabblleess ddeell ttiippoo JJooiinntt
EEjjeemmppllooss:: JJ1100 == JJ__CCUURRRR
JJ1100..WW == JJ1100..WW++RRAADD((MM55))
--VVaarriiaabblleess ddee ““aarrttiiccuullaacciióónn””:: DDaattooss qquuee hhaacceenn rreeffeerreenncciiaa aa
ppoossiicciióónn ddee llooss eejjeess.. TTooddaass llaass vvaarriiaabblleess ddee eessttee ttiippoo
eemmppiieezzaann ccoonn JJ..
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 1133
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
EExxpprreessiioonneess ccoonn vvaarriiaabblleess ddee CCaaddeennaa ddee ccaarráácctteerreess
EEjjeemmppllooss::
CC3300$$ == ““NNºº ddee ppaassoo ddee sseeccuueenncciiaa..””
CC$$[[MM110000]] == ““SSiigguuiieennttee ppoossiicciióónn””((!!))
CC$$[[MM1100**22]] == ““NNúúmmeerroo ddee ppoossiicciióónn::””((!!))
((!!)) SSóólloo eenn MMeellffaa BBaassiicc IIIIII
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 1144

Anexo 2 96
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
FFuunncciioonneess ddee mmoovviimmiieennttoo:: MMOOVV
MMOOVV:: MMoovviimmiieennttoo iinntteerrppoollaacciióónn ddee eejjeess
DDeessccrriippcciióónn:
EEssttaa iinnssttrruucccciióónn mmuueevvee aa uunn ppuunnttoo ddeetteerrmmiinnaaddoo mmeeddiiaannttee
iinntteerrppoollaacciióónn ddee eejjeess.. LLaa ttrraayyeeccttoorriiaa ddee uunn ppuunnttoo aa oottrroo nnoo
eess lliinneeaall,, eess ddeecciirr,, nnoo ddeessccrriibbee uunnaa llíínneeaa rreeccttaa eenn eell eessppaacciioo,,
ssiinnoo qquuee llaa CCPPUU pprroocceessaa yy mmuueevvee llooss eejjeess aa ssuu
ccoonnvveenniieenncciiaa
,, ppoorr ssuu ccaammiinnoo mmááss sseenncciilllloo.. PPoorr lloo ttaannttoo llaa ttrraayyeeccttoorriiaa nnoo eess
110000%% pprreeddeecciibbllee ppoorr eell uussuuaarriioo
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 1155
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
FFuunncciioonneess ddee mmoovviimmiieennttoo:: MMOOVV
10 MOV P1 ;mueve hacia P1
20 MOV P2,-50 ;mueve respecto P2, 50mm atrás de la
;posición de la mano (desp. relativo)
30 MOV P2 ;mueve hacia P2
40 MOV P3,-100 WTH M_OUT(17)=1 ;mueve respecto P3,100mm atrás, mientras activa
;salida bit nº
17
50 MOV P3 ;mueve hacia P3
60 MOV P3,-100 ;mueve respecto P3, 100mm atrás(desp.relativo)
70 END ;fin de programa MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 1166

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
FFuunncciioonneess ddee mmoo
CCoommeennttaarriiooss::
--EEll mmoovviimmiieennttoo eenn ee
lloo ttaannttoo,, nnoo eess 110000%%
ccaauutteellaa,, ppaarraa eevviittaarr
eennttoorrnnoo ddeell rroobboott..
--CCuuaannddoo ssee uussaa eell
eejjeemmpplloo MMOOVV PP
ddeetteerrmmiinnaaddoo ppoorr eell
-Z
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa
FFuunncciioonneess ddee mmoo
MMVVSS :: MMoovviimmiieennttoo eenn
DDeessccrriippcciióónn::
EEssttaa iinnssttrruucccciióónn mmuueevv
mmeeddiiaannttee iinntteerrppoollaacciióónn
aa oottrroo eess lliinneeaall,, eess ddeecc
eessppaacciioo..
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa
Anexo 2
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
oovviimmiieennttoo:: MMOOVV
eessttee ttiippoo ddee iinnssttrruucccciioonneess nnoo eess lliinneeaall,, ppoorr
%% pprreeddeecciibbllee.. UUttiilliizzaarr eessttaa iinnssttrruucccciióónn ccoonn
rr ccoolliissiioonneess ddeell bbrraazzoo ccoonn aallgguunnaa ppaarrttee ddeell
ddeessppllaazzaammiieennttoo rreellaattiivvoo ddeessddee uunn ppuunnttoo,, ((ppoorr
PP33,,--110000)) eell sseennttiiddoo ddee aavvaannccee vviieennee ssiiggnnoo ddee ééssttee,, eenn ssuu ccoooorrddeennaaddaa ZZ::
Z
+Z
1177
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
oovviimmiieennttoo:: MMVVSS
nn iinntteerrppoollaacciióónn lliinneeaall
vvee aa uunn ppuunnttoo ddeetteerrmmiinnaaddoo
nn lliinneeaall.. LLaa ttrraayyeeccttoorriiaa ddee uunn ppuunnttoo
cciirr,, ddeessccrriibbee uunnaa llíínneeaa rreeccttaa eenn eell
1188
97
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
sco

Anexo 2 98
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
FFuunncciioonneess ddee mmoovviimmiieennttoo:: MMVVSS
10 MVS P1,-50 ;mueve respecto P2, 50mm atrás, en línea recta
;(desp. relativo)
20 MVS P1 ;mueve hacia P1 en línea recta
30 MVS,-50 ;mueve 50mm atrás desde la posición actual
; en línea recta (desp. relativo)
40 MVS P2,-100 WTH M_OUT(17)=1 ;mueve respecto P2,en línea recta,
;100mm atrás, mientras activa
;salida bit nº 17
50 MVS P2 ;mueve hacia P2, en línea recta
60 MVS,-50 ;mueve respecto P2, en línea recta 50mm
;atrás (desp. relativo)
70 END ;fin de programa
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 1199
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
FFuunncciioonneess ddee mmoovviimmiieennttoo:: MMVVSS
CCoommeennttaarriiooss::
--CCuuaannddoo ssee uussaa eell ddeessppllaazzaammiieennttoo rreellaattiivvoo ddeessddee uunn ppuunnttoo,, ((ppoorr
eejjeemmpplloo MMVVSS PP33,,--110000)) eell sseennttiiddoo ddee aavvaannccee vviieennee
ddeetteerrmmiinnaaddoo ppoorr eell ssiiggnnoo ddee ééssttee,, eenn ssuu ccoooorrddeennaaddaa ZZ,, ttaall
ccoommoo ssee hhaaccee ccoonn MMOOVV..
--AAll uussaarr eell ddeessppllaazzaammiieennttoo rreellaattiivvoo,, llaa ppoossiicciióónn ddeessttiinnoo eess ffiiccttiicciiaa
(( nnoo ccoonnssttaa eenn ttaabbllaa ddee ccoooorrddeennaaddaass,, ppoorr lloo ttaannttoo nnoo eess uunn
ppuunnttoo rreeggiissttrraaddoo)).. UUssaarrlloo ccoonn ccuuiiddaaddoo ppaarraa eevviittaarr ccoolliissiioonneess
ddeell bbrraazzoo ccoonn aallgguunnaa ppaarrttee ddeell eennttoorrnnoo ddeell rroobboott..
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 2200

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
MMoovviimmiieennttooss eenn
MMVVRR :: DDeessiiggnnaaddoo uunn
ttrráánnssiittoo yy uunn ppuunnttoo ffiinnaa
eellllooss ((ddeessccrriibbee uunn aarrccoo
cciirrccuullaarr ddee eejjeess..
EEjjeemmpplloo::
MMVVRR PP11,,PP22,,PP33
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa
MMoovviimmiieennttooss eenn
MMVVRR22 :: DDeessiiggnnaaddoo uunn
ffiinnaall yy uunn punto ddee rreeffeerr
ppuunnttoo iinniicciiaall aall ppuunnttoo ffiinn
rreeffeerreenncciiaa.. LLaa ttrraayyeeccttoorrii
uunn aarrccoo qquuee iinncclluuyyee eell pp
eell sseeggmmeennttoo ccoorrrreessppoonndd
ffiinnaall..
EEjjeemmpplloo::
MMVVRR22 PP11,,PP22,,PP33
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa
Anexo 2
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
iinntteerrppoollaacciióónn cciirrccuullaarr:: MMVVRR
n ppuunnttoo ddee ccoommiieennzzoo,,, uunn ppuunnttoo ddee
aall,, ssee rreeaalliizzaa uunn mmoovviimmiieennttoo aa ttrraavvééss ddee
oo eenn eell eessppaacciioo)),, mmeeddiiaannttee iinntteerrppoollaacciióónn
P3
P1
P2
2211
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
iinntteerrppoollaacciióónn cciirrccuullaarr:: MMVVRR22
nn ppuunnttoo ddee ccoommiieennzzoo,, uunn ppuunnttoo ddee
rreenncciiaa,, ssee rreeaalliizzaa uunn mmoovviimmiieennttoo ddeell
nnaall ssiinn ppaassaarr ppoorr eell ppuunnttoo ddee
iiaa sseegguuiiddaa eess llaa qquuee ccoorrrreessppoonnddeerrííaa aa
ppuunnttoo ddee rreeffeerreenncciiaa,, ppeerroo ssóólloo ssee ttrraazzaa
ddiieennttee aall ttrraammoo ddeell ppuunnttoo iinniicciiaall aall
P3 P1
33
P2
2222
99
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
sco

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
MMoovviimmiieennttooss eenn
MMVVRR33 :: DDeessiiggnnaaddoo uu
cceennttrroo yy uunn ppuunnttoo ddee ffii
ppuunnttoo ddee iinniicciioo hhaassttaa ee
ttrraazzaaddaa rreessppeeccttoo aall ppuu
ddeebbee sseerr eennttrree 00 yy 118800
EEjjeemmpplloo::
MMVVRR33
PP11,,PP22,,PP33
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa
MMoovviimmiieennttooss eenn
MMVVCC :: DDeessiiggnnaaddoo uunn
ppuunnttoo ddee ttrráánnssiittoo 11 yy uunn
aarrccoo ddeessddee eell ppuunnttoo ddee
ttrráánnssiittoo
11,, lluueeggoo ppoorr eell 22 yy ffiinnaallii
mmiissmmoo ddee ccoommiieennzzoo.. DDee
uunnaa eelliippssee ccoommpplleettaa..
EEjjeemmpplloo::
MMVVCC PP11,,PP22,,PP33
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa
Anexo 2
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
iinntteerrppoollaacciióónn cciirrccuullaarr:: MMVVRR33
uunn ppuunnttoo ddee ccoommiieennzzoo,, uunn ppuunnttoo ddee
iinnaall,, ssee ddeessccrriibbee uunn aarrccoo ddeessddee eell
eell ddee ffiinnaall,, ccuuyyaa ttrraayyeeccttoorrii aa eess
uunnttoo ddee cceennttrroo.. EEll áánngguulloo ttrraazzaaddoo
00ºº ::
P1 P3
P2
2233
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
iinntteerrppoollaacciióónn cciirrccuullaarr:: MMVVCC
nn ppuunnttoo ddee ccoommiieennzzoo iigguuaall aall ffiinnaall,, uunn
nn ppuunnttoo ddee ttrráánnssiittoo 22,, ddeessccrriibbee uunn ccoommiieennzzoo ppaassaannddoo ppoorr eell ppuunnttoo ddee
iizzaa eenn llee ppuunnttoo ffiinnaall,, qquuee eess eell
eessccrriibbee ppoorr lloo ttaannttoo uunn ccíírrccuulloo oo
P3
P1
P2
2244
100
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
sco

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
MMoovviimmiieennttooss eenn
10 MVR P1,P2,P3 WHT M_OUT(18
20 MVR P3,P4,P5
30 MVR2 P5,P7,P6
40 MVR3 P7,P9,P8
50 MVC P9,P10,P11
60 END
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa
MMoovviimmiieennttooss ssiinn
CCNNTT :: MMoovviimmiieennttoo ssii
DDeessccrriippcciióónn::
EEssttaa iinnssttrruucccciióónn ppeerrmmiitt
ppuunnttooss mmúúllttiipplleess -- ddeeffiinn
iinntteerrrruuppcciioonneess,, eess ddeeccii
EEnn eell mmoommeennttoo qquuee ssee
iinnssttrruucccciioonneess ddee mmoovviimm
ffoorrmmaa..
CNT 1 ;Desig
CNT CNT 0 ;Desig
CNT CNT 1,100,200 ;Desig
;define
;el de
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa
Anexo 2
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
iinntteerrppoollaacciióónn cciirrccuullaarr
8) ;Mueve P1→P2→P3 como un arco,
; mientras activa la salida bit 18
;Mueve P3→P4→P5 como un arco ;Arco de P5→P7 con trayectoria de P6
;Describe P7→P9 con centro en P8
;Arco cerrado P9→P10→P11→P9
2255
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
nn iinntteerrrruuppcciioonneess:: CCNNTT
iinn iinntteerrrruuppcciioonneess
ttee qquuee ssee rreeaalliizzaa uunn mmoovviimmiieennttoo eennttrree
nniiddooss ppoorr MMOOVV,,MMVVSS,,MMVVRR,, eettcc,, ssiinn
iirr,, ssiinn aaaccceeellleeerrraaaccciiiooonnneeesss nnii dddeeeccceeellleeerrraaaccciiiooonnneeesss...
ee ddeeccllaarraa eessttaa iinnssttrruucccciióónn,, ttooddaass llaass
mmiieennttoo aa ppaarrttiirr ddee eellllaa ssee hhaacceenn ddee eessttaa
;Designa la activación de la función
;Designa la desactivación de la función
;Designa la activación de la función, y
;define que el punto De comienzo a 100mm y
;el de final a 200mm del punto destino
2266
101
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
sco

Anexo 2 102
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
MMoovviimmiieennttooss ssiinn iinntteerrrruuppcciioonneess
10 MOV P1
20 CNT 1 ; a partir de las siguientes líneas se habilita CNT
30 MVR P2,P3,P4
40 MVS P5 ;
50 CNT 1,100,200 ; El punto de comienzo más cercano a 100mm,
;el de final más cercano a 200mm
60 MVS P6
70 MVS P1
80 CNT 0
90 END
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 2277
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
DDeeffiinniicciióónn ddee vveelloocciiddaaddeess yy aacccc.. ddeecccc..
AACCCCEELL :: DDeessiiggnnaa aacceelleerraacciióónn yy ddeecceelleerraacciióónn eenn %%
rreessppeeccttoo aa llaa mmááxxiimmaa ppeerrmmiittiiddaa
OOVVRRDD :: DDeessiiggnnaa llaa vveelloocciiddaadd ddee ttrraabbaajjoo ddeell rroobboott eenn %%..
JJOOVVRRDD :: DDeessiiggnnaa llaa vveelloocciiddaadd ddee iinntteerrppoollaacciióónn ddee
eejjeess eenn %% rreessppeeccttoo aa llaa mmááxxiimmaa ppeerrmmiittiiddaa
SSPPDD :: DDeessiiggnnaa llaa vveelloocciiddaadd eenn mmmm//ss ddee llaa iinntteerrppoollaacciióónn
cciirrccuullaarr yy lliinneeaall,, vveelloocciiddaadd ddee llaa ppaarrttee mmóóvviill ((ppuunnttoo ddee
ttrraabbaajjoo,, mmaannoo,, eettcc..))
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 2288

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
DDeeffiinniicciióónn ddee vvee
10 OVRD 100 ;fija
20 MOV P1
30 MOV P2,-50
40 OVRD 50 ; fija
50 MVS P2
60 SPD 120 ; movi
70 OVRD 100 ;veloc
80 ACCEL 70,70 ;acele
90 MVS P3
100 SPD M_NSPD ;fija
110 JOVRD 70 ;veloc
120 ACCEL ;fija
130 MVS, -50
140 MOV P1
150 END MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa
CCoonnttrrooll ddee uutteenn
HHOOPPEENN ::AAbbrree llaa pp
HHCCLLOOSSEE ::CCiieerrrraa llaa 1100 MMOOVV PP11,,--5500
2200 OOVVRRDD 5500
3300 MMVVSS PP11
4400 HHCCLLOOSSEE 11 ;; cciieerrrraa pp
5500 DDLLYY 00..55 ;; eejjeeccuuttaa
6600 OOVVRRDD 110000
7700 MMVVSS ,,--5500
8800 MMOOVV PP22,,--5500
9900 OOVVRRDD 5500
110000 MMVVSS PP22
111100 HHOOPPEENN 11 ;; aabbrree ppiinn
112200 DDLLYY 00..55 ;; rreeaalliizzaa
113300 OOVVRRDD 110000
114400 MMVVSS,,--5500
115500 EENNDD
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa
Anexo 2
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
La parte de imagen con el identificador de relación rId184 no se encontró en el archivo.
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
eelloocciiddaaddeess yy aacccc.. ddeecccc..
;fija la velocidad de trabajo al 100%
; fija la velocidad de trabajo al 50%
; movimientos lineales a 120mm/s
;velocidad general al 100%
;aceler. y deceler. a 70%
;fija la velocidad lineal a su valor nominal
;velocidad de interpolación ejes a 70%
;fija la aceleración y deceleración al 100%
2299
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
nnssiilliiooss ((PPiinnzzaa))
ppiinnzzaa ddeessiiggnnaaddaa
ppiinnzzaa ddeessiiggnnaaddaa
ppiinnzzaa nnºº 11 ((aattrraappaa ppiieezzaa))
uunn rreettaarrddoo ddee mmeeddiioo sseegguunnddoo
nnzzaa nnºº 11 (( ssuueellttaa ppiieezzaa))
uunn rreettaarrddoo
3300
103
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
sco

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
FFuunncciióónn ddee PPaalleettiizzaaddoo
DDeessccrriippcciióónn::
EEssttaa ffuunncciióónn ddeessaarrrroollllaa uunn mmoovviimmiieennttoo pprrooggrraammaaddoo eenn ffiillaass
yy ccoolluummnnaass,,, ppaarraa rreeaalliizzaarr ooppeerraacciioonneess ddeell ttiippoo ddee
mmaanniippuullaacciióónn eenn ccaajjaass ccoommppaarrttiimmeennttaaddaass,, ooppeerraacciioonneess
sseerriiaaddaass eenn uunnaa ssuuppeerrffiicciiee,, eettcc..
DDEEFF PPLLTT :: DDeeffiinnee eell ppaalllleett aa sseerr uussaaddoo
PPLLTT :: ccaallccuullaa llaa ppoossiicciióónn aaccttuuaall ddee uunnaa ccaassiillllaa ddeell ppaalllleett uussaaddoo
SSiinnttaaxxiiss::
DDEEFF PPLLTT <<PPaalllleett NNoo..>>,, <<ppuunnttoo SSTTAARRTT>>,, <<ppuunnttoo FFIINNAALL AA>>,, <<ppuunnttoo ffiinnaall
BB>>,, [[<<ppuunnttoo DDiiaaggoonnaall >>]],, <<ccaannttiiddaadd AA>>,, <<ccaannttiiddaadd BB>>,, <<ddiirreecccciióónn
ddee aavvaannccee>>
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 3311
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
FFuunncciióónn ddee PPaalleettiizzaaddoo
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 3322

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
FFuunncciióónn ddee PPaallee
10 DEF PLT 1,P2,P3,P4,P5,3,5,2
20 M1=1
30 *BUCLE ;Designa una
40 MOV P1,-50
50 OVRD 50
60 MVS P1
70 HCLOSE 1
80 DLY 0.5
90 OVRD 100
100 MVS,-50 ;Mov.50mm atr
110 P10=PLT 1,M1 ;Opera en pos
120 MOV P10,-50
130 OVRD 50
140 MVS P10
150 HOPEN 1
160 DLY 0.5
170 OVRD 100
180 MVS,-50 ;Mov.50mm atr
;de posición
190 M1=M1+1
200 IF M1<=15 THEN *BUCLE
210 END
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa
CCoommaannddooss ddee ccoo
DDeessccrriippcciióónn ggeenneerraall::
EEssttooss ccoommaannddooss rreeaalliizzaa
BBAASSIICC eessttáánnddaarr,, yy ssiirrvvee
pprrooggrraammaa aa llíínneeaass ddeettee
aa uunn ccaassoo ppaarrttiiccuullaarr oo iinn
GGOOTTOO :: SSaallttoo iinnccoonnddi
SSiinnttaaxxiiss:: GGOOTTOO <<llíínneeaa oo llaabb
EEjjeemmppllooss::
GGOOTTOO 220000 ;;ssaa
GGOOTTOO **FFIINNAALL ;;ssaa
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
eettiizzaaddoo
,2 ;Define el pallet nº 1, punto
;START=P2, punto END A=P3, punto END
;B=5, dirección
a etiqueta llamada BUCLE
trás de posición actual
osición M1 del pallet 1
trás
n actual
3333
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
oonnttrrooll ddee pprrooggrraammaa
aann llaass mmiissmmaass ffuunncciioonneess qquuee eell
ee ppaarraa ttrraannssffeerriirr eell ccoonnttrrooll ddeell
eerrmmiinnaaddaass ddee ééssttee,, ccoonnddiicciioonnaallmmeennttee
nnccoonnddiicciioonnaallmmeennttee..
diicciioonnaall aa llíínneeaa
bbeell>>
aallttaa aa llíínneeaa nnºº 220000
aallttaa aa llíínneeaa mmaarrccaaddaa ccoommoo ** FFIINNAALL
3344
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
sco

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
CCoommaannddooss ddee ccoonnttrrooll ddee pprrooggrraammaa
OONN ……GGOOTTOO ::SSaallttoo cccooonnndddiiiccciiiooonnnaaalll aa lll ííínnneeeaaa dddeeesssiiigggnnnaaadddaaa ppoorr
uunnaa vvaarriiaabbllee eenntteerraa.. EEll pprrooggrraammaa sseegguuiirráá eell vvaalloorr ddee oorrddeenn
ddee eessttaa vvaarriiaabbllee ((00,,11,,22,,33,,44……))
SSiinnttaaxxiiss:: OONN <<VVaarriiaabbllee eenntteerraa>> GGOOTTOO<<ddeessttiinnoo>><<ddeessttiinnoo>><<ddeessttiinnoo>>……
EEjjeemmppllooss::
OONN MM11 GGOOTTOO 110000,,220000,,330000 ;;SSII MM11==11 ssaallttaa aa 110000,,
;;ssii MM11==22 ssaallttaa aa
;;220000……ssii nnoo
;;ccoorrrreessppoonnddee,, ssaallttaa aa
;;ssiigguuiieennttee
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 3355
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
CCoommaannddooss ddee ccoonnttrrooll ddee pprrooggrraammaa
IIFF…… TTHHEENN…… EELLSSEE ::SSaallttoo cccooonnndddiiiccciiiooonnnaaadddooo,,, ssii nnoo ssee ddaa llaa ccciiirrrcccuuunnnssstttaaannnccciiiaaa ssee eeejjjeeecccuuutttaaa eell ssaallttoo dddeeesssiiigggnnnaaadddooo eenn EELLSSEE.. EEll
ccoommaannddoo EELLSSEE eess ooppcciioonnaall..
SSiinnttaaxxiiss:: IIFF <<ccoonnddiicciióónn>> TTHHEENN <<llíínneeaa>> EELLSSEE <<llíínneeaa
oo llaabbeell>>
EEjjeemmppllooss
IIFF MM11==11 TTHHEENN 113300 ;;SSaallttaa aa 113300 ssii MM11==11
IIFF MM11==11 TTHHEENN 113300 EELLSSEE 115500 ;;SSaallttaa aa 113300 ssii MM11==11,,
;;ssii nnoo ssaallttaa aa 115500
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 3366
Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
CCoommaannddooss ddee ccoonnttrrooll ddee pprrooggrraammaa
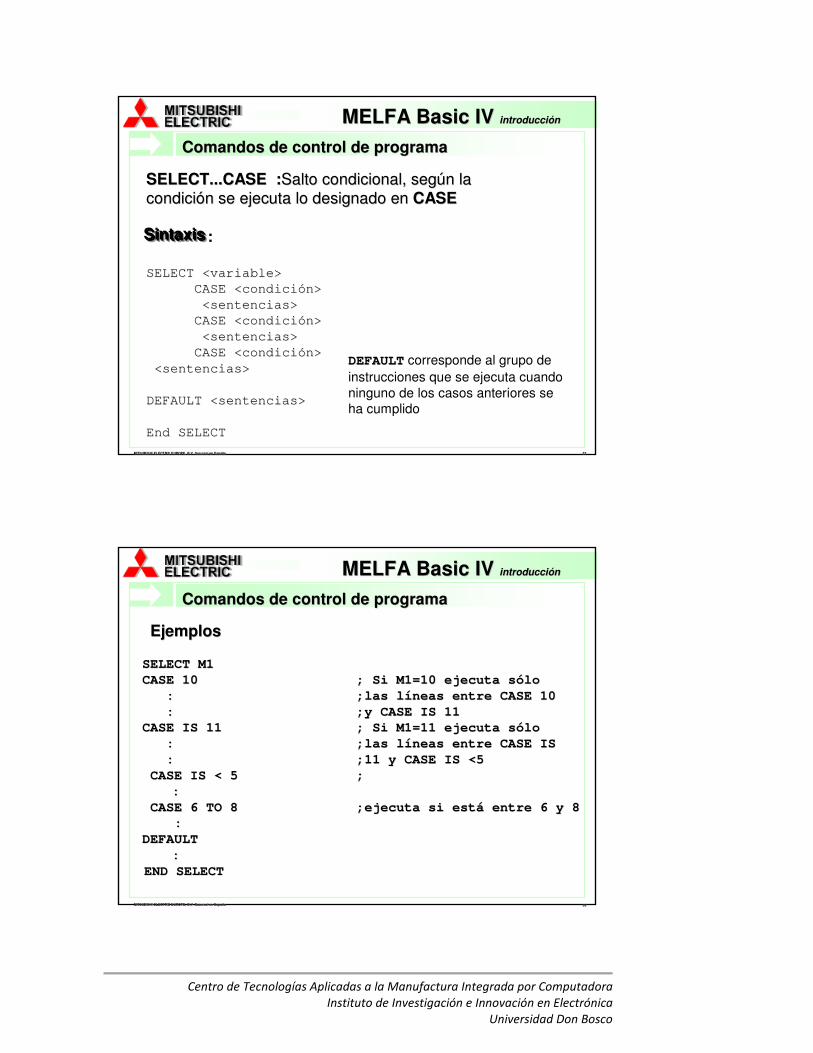
SSEELLEECCTT......CCAASSEE ::SSaallttoo ccoonnddiicciioonnaall,, sseeggúúnn llaa
ccoonnddiicciióónn ssee eejjeeccuuttaa lloo ddeessiiggnnaaddoo eenn CCAASSEE
SSSiiinnntttaaaxxxiiisss:
SSEELLEECCTT <<vvaarriiaabbllee>>
CCAASSEE <<ccoonnddiicciióónn>>
<<sseenntteenncciiaass>>
CCAASSEE <<ccoonnddiicciióónn>>
<<sseenntteenncciiaass>>
CCAASSEE <<ccoonnddiicciióónn>>
<<sseenntteenncciiaass>>
DDEEFFAAUULLTT <<sseenntteenncciiaass>>
EEnndd SSEELLEECCTT
DDEEFFAAUULLTT corresponde al grupo de
instrucciones que se ejecuta cuando
ninguno de los casos anteriores se ha cumplido
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 3377
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
CCoommaannddooss ddee ccoonnttrrooll ddee pprrooggrraammaa
EEjjeemmppllooss
SSEELLEECCTT MM11
CCAASSEE 1100 ;; SSii MM11==1100 eejjeeccuuttaa ssóólloo
:: ;;llaass llíínneeaass eennttrree CCAASSEE 1100
:: ;;yy CCAASSEE IISS 1111
CCAASSEE IISS 1111 ;; SSii MM11==1111 eejjeeccuuttaa ssóólloo
:: ;;llaass llíínneeaass eennttrree CCAASSEE IISS
:: ;;1111 yy CCAASSEE IISS <<55
CCAASSEE IISS << 55 ;;
::
CCAASSEE 66 TTOO 88 ;;eejjeeccuuttaa ssii eessttáá eennttrree 66 yy 88
::
DDEEFFAAUULLTT
::
EENNDD SSEELLEECCTT
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 3388

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
CCoommaannddooss ddee ccoonnttrrooll ddee pprrooggrraammaa
WWAAIITT :: EEssppeerraa eenn eessttaa llíínneeaa hhaassttaa qquuee llaa ccoonnddiicciióónn
hhaa ssiiddoo aallccaannzzaaddaa
SSiinnttaaxxiiss::
WWAAIITT <<ccoonnddiicciióónn>>
EEjjeemmpplloo::
WWAAIITT MM__IINN((11)) ;;EEssppeerraa eenn eessttaa llíínneeaa hhaassttaa qquuee llaa
sseeññaall ddee eennttrraaddaa 11 eessttáá aaccttiivvaa
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 3399
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
RReeppeettiicciióónn iinnccoonnddiicciioonnaall
FFOORR……NNEEXXTT :: RReeppiittee llaass iinnssttrruucccciioonneess ccoommpprreennddiiddaass
eennttrree FFOORR yy NNEEXXTT llaass vveecceess qquuee iinnddiiqquuee llaa sseenntteenncciiaa
FFOORR.. EEll ccoommaannddoo SSTTEEPP eess ooppcciioonnaall
SSiinnttaaxxiiss:: FFOORR <<vvaarriiaabbllee>> == <<ccoonnsstt..//vvaarriiaabbllee>> TTOO <<ccoonnsstt..//vvaarriiaabbllee>>
SSTTEEPP <<ppaassoo>>
((sseenntteenncciiaass))
NNEEXXTT
EEjjeemmpplloo:: 1100 FFOORR MM11 == 11 TTOO 1100 ;;LLaass llíínneeaass eennttrree 1100 yy 6600 ssee
:: ;;rreeppeettiirráánn 1100 vveecceess
::
6600 NNEEXXTT
7700 FFOORR MM22== 00 TTOO 5500 SSTTEEPP 1100 ;;SSee iinnccrreemmeennttaa MM22 eenn ppaassooss ddee
:: ;; 1100 uunniiddaaddeess
::
110000 NNEEXXTT MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 4400

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
RReeppeettiicciióónn ccoonnddiicciioonnaall
WWHHIILLEE……WWEENNDD:: RReeppiittee llaass sseenntteenncciiaass ccoommpprreennddiiddaass
eennttrree WWHHIILLEE yy WWEENNDD hhaassttaa qquuee ssee ccuummppllaa uunnaa ccoonnddiicciióónn
ddeetteerrmmiinnaaddaa
SSiinnttaaxxiiss:: WWHHIILLEE <<vvaarriiaabbllee
ccoonnddiicciióónn>> ((sseenntteenncciiaass))
WWEENNDD
EEjjeemmpplloo:: 1100 WWHHIILLEE ((MM11>>==11))AANNDD((MM11<<==1100)) ;;LLaass llíínneeaass eennttrree 1100 yy 6600
:: ;;ssee rreeppeettiirráánn HHAASSTTAA qquuee MM11
:: ;;eessttéé eennttrree 11 yy 1100
::
6600 WWEENNDD
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 4411
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
LLllaammaaddaa aa ssuubbrruuttiinnaass ((iinnccoonnddiicciioonnaall))
GGOOSSUUBB:: llllaammaa aa llíínneeaa ddeetteerrmmiinnaaddaa eenn llaa iinnssttrruucccciióónn
yy vvuueellvvee aa eellllaa ttrraass eennccoonnttrraarr RREETTUURRNN eenn llaa ssuubbrruuttiinnaa..
SSiinnttaaxxiiss:: GGOOSSUUBB <<LLIINNEEAA//LLAABBEELL>>
TTooddaa ssuubbrruuttiinnaa ddeebbee aaccaabbaarr eenn RREETTUURRNN ppaarraa rreettoorrnnaarr eell ccoonnttrrooll aa llaa llíínneeaa ssiigguuiieennttee ttrraass GGOOSSUUBB
EEjjeemmpplloo:: 1100 GGOOSSUUBB 11000000 ;;LLLLAAMMAADDAA aa ssuubbrruuttiinnaa
2200 <<sseenntteenncciiaass>> ;;ttrraannssffiieerree eell ccoonnttrrooll aa
:: ;;llaa llíínneeaa 11000000 hhaassttaa qquuee
:: ;;eennccuueennttrraa RREETTUURRNN,, ttrraass
:: ;;eelllloo vvuueellvvee aa 2200
11000000 <<sseenntteenncciiaass>>
::
::
11440000 RREETTUURRNN
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 4422

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
LLllaammaaddaa aa ssuubbrruuttiinnaass ((ccoonnddiicciioonnaall))
OONN ……GGOOSSUUBB ::SSaallttoo ccoonnddiicciioonnaall aa llíínneeaa ddeessiiggnnaaddaa ppoorr uunnaa
vvaarriiaabbllee eenntteerraa.. EEll pprrooggrraammaa sseegguuiirráá eell vvaalloorr ddee oorrddeenn ddee
eessttaa vvaarriiaabbllee ((00,,11,,22,,33,,44……))
SSiinnttaaxxiiss:: OONN <<VVaarriiaabbllee eenntteerraa>> GGOOSSUUBB <<ddeessttiinnoo>><<ddeessttiinnoo>><<ddeessttiinnoo>>……
TTooddaa ssuubbrruuttiinnaa ddeebbee aaccaabbaarr eenn RREETTUURRNN ppaarraa rreettoorrnnaarr eell ccoonnttrrooll aa llaa llíínneeaa ssiigguuiieennttee ttrraass OONN......GGOOSSUUBB
EEjjeemmppllooss::
OONN MM11 GGOOSSUUBB 110000,,220000,,330000 ;;SSII MM11==11 ssaallttaa aa 110000,,
:: ;;ssii MM11==22 ssaallttaa aa
:: ;;220000……ssii nnoo
110000 <<sseenntteenncciiaass>> ;;ccoorrrreessppoonnddee,,ssaallttaa aa
::
220000 <<sseenntteenncciiaass>> ;;ssiigguuiieennttee
::
330000 <<sseenntteenncciiaass>>
11000000 RREETTUURRNN MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa4433
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
LLllaammaaddaa aa ssuubb--pprrooggrraammaass
CCAALLLLPP ::TTrraannssffiieerree eell ccoonnttrrooll ddeell pprrooggrraammaa aa oottrroo
pprrooggrraammaa aallmmaacceennaaddoo eenn llaa DDrriivvee UUnniitt;; uunnaa vveezz lloo eejjeeccuuttaa,,
vvuueellvvee aa ppaassaarr eell ccoonnttrrooll aall pprrooggrraammaa pprriinncciippaall...
OOppcciioonnaallmmeennttee ppuueeddee ppaassaarr ppaarráámmeettrrooss..
FFPPRRMM ::RReecciibbee ppaarráámmeettrrooss yy vvaarriiaabblleess ddeessddee eell pprrooggrraammaa
pprriinncciippaall,, hhaacciiaa eell pprrooggrraammaa llllaammaaddoo..
SSiinnttaaxxiiss:: CCAALLLLPP <<NNoommbbrree pprrooggrraammaa>> <<ppaarráámmeettrrooss yy aarrgguummeennttooss>>
EEjjeemmpplloo::
PPrrooggrraammaa pprriinncciippaall PPrrooggrr.. NNoo..22
1100 MMOOVV PP11
2200 CCAALLLLPP ““22””,,PP22,,PP77
3300 EENNDD
1100 FFPPRRMM PP220000,,PP770000
110000 MMOOVV PP220000
111100 MMOOVV PP770000
112200 EENNDD MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 4444

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
IInntteerrrruuppcciioonneess
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
DDEEFF AACCTT ::DDeeffiinnee llaass ccoonnddiicciioonneess ddee llaa iinntteerrrruuppcciióónn yy
llaa iinnssttrruucccciióónn aa rreeaalliizzaarr ttrraass eellllaa ..
AACCTT :: EEssttaabblleeccee llaa pprriioorriiddaadd ddee eessttaa iinntteerrrruuppcciióónn ssoobbrree
llaass oottrraass
SSiinnttaaxxiiss:: DDEEFF AACCTT <<NNººddee IInntt..>> <<ccoonnddiicciióónn>> <<PPrroocceessoo>> <<LL>>
EEjjeemmpplloo:: 1100 DDEEFF AACCTT 11,,MM__IINN((1177))==11 GGOOSSUUBB 110000 ;; SSii eennttrraaddaa 1177 eess OONN,, ssaallttaa
;;iinnmmeeddiiaattaammeennttee aa llíínneeaa 110000
3300 DDEEFF AACCTT 33,,MM__TTIIMMEERR((11))>>1100..55 GGOOSSUUBB 330000 ;;CCuuaannddoo ppaassaann 1100..55 sseegguunnddooss
;;ttrraannssffiieerree eell ccoonnttrrooll aa llíínneeaa
;;ssuubbrruuttiinnaa 330000..
110000 MM__TTIIMMEERR((11))==00
111100 AACCTT 33==11 ;;EEssttaabblleeccee pprriioorriiddaaddeess
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 4455
IInntteerrrruuppcciioonneess
NNoottaass::
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
••LLooss ssaallttooss ppoorr iinntteerrrruuppcciióónn qquuee lllleevveenn aa uunnaa iinnssttrruucccciióónn
GGOOSSUUBB,, ddeebbeenn rreettoorrnnaarr ccoonn RREETTUURRNN,, eenn eessttee ccaassoo::
RREETTUURRNN <<nnºº ddee iinntteerrrruuppcciióónn>>
••LLaass pprriioorriiddaaddeess ssee eessttaabblleecceenn ccoonn AACCTT<<nnººiinntt>>==<<nniivveell>>
yy vvaann ddee 11((mmaayyoorr)) aa 88((mmeennoorr))
••PPrriioorriiddaadd 00 ssiiggnniiffiiccaa iinntteerrrruuppcciióónn ddeessaabbiilliittaaddaa ((AACCTT<<nnººiinntt>>==00))
••CCuuaannddoo ssee ppoonnee uunnaa LL aall ffiinnaall ssiiggnniiffiiccaa qquuee llaa iinntteerrrruuppcciióónn
ssee eejjeeccuuttaarráá aall ffiinnaalliizzaarr llaa iinnssttrruucccciióónn eenn ccuurrssoo::
DDEEFF AACCTT 11,,MM__IINN((1177))==11 GGOOSSUUBB 110000,, LL
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 4466

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MELFAMELFA RobotsRobots
PPaarroo iinnccoonnddiicciioonnaall
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
HHLLTT ::PPaarraa eell pprrooggrraammaa eenn aaqquueell ppuunnttoo
SSiinnttaaxxiiss:: HHLLTT
EEjjeemmpplloo:: 1100 IIFF MM__IINN((2200))TTHHEENN HHLLTT ;;ddeettiieennee eell pprrooggrraammaa ssii llaa
;;eennttrraaddaa 2200 eess OONN
RReettaarrddooss
DDLLYY ::eessttaabblleeccee uunn rreettaarrddoo
SSiinnttaaxxiiss:: DDLLYY <<sseegguunnddooss ((00..0055 mmíínniimmoo))>>
EEjjeemmpplloo:: 1100 DDLLYY 00..88 ;;ddeettiieennee eell pprrooggrraammaa dduurraannttee 00..88 ss..
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 4477
EEnnttrraaddaass yy SSaalliiddaass
SSiinnttaaxxiiss::
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
EEnnttrraaddaass:: <<vvaarriiaabbllee>>==MM__IINN((<<bbiitt>>))
<<vvaarriiaabbllee>>==MM__IINNBB((<<bbyyttee>>))
<<vvaarriiaabbllee>>==MM__IINNWW((<<wwoorrdd>>))
SSaalliiddaass:: MM__OOUUTT((<<bbiitt>>))==<<11//00>>
MM__OOUUTT((<<bbyyttee>>))==<<bbyyttee>>
MM__OOUUTT((<<wwoorrdd>>))==<<wwoorrdd>>
EEjjeemmppllooss:: MM11==MM__IINNBB((2200)) ;;BBiittssOOUUTT 2200 aa 2277 ppaassaann aa MM11
WWAAIITT MM__IINN((33))==11 ;;EEssppeerraa hhaassttaa qquuee bbiittIINN 33 eess OONN
MM__OOUUTT((11))==11 DDLLYY 00..55 ;;ccoonnmmuuttaa bbiittOOUUTT 11 aa OONN dduurraannttee 00..55SS
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 4488

Centro de Tecnologías Aplicadas a la Manufactura Integrada por Computadora
Instituto de Investigación e Innovación en Electrónica
Universidad Don Bosco
MMEELLFFAA BBaassiicc IIVV iinnttrroodduucccciióónn
OOppeerraacciioonneess aarriittmmééttiiccaass // llóóggiiccaass // ffuunncciioonneess
MMEELLFFAA BBaassiicc ppeerrmmiittee rreeaalliizzaarr ooppeerraacciioonneess ccoonn nnúúmmeerrooss
yy ccoommppaarraacciioonneess.. EEjjeemmppllooss::
ssuussttiittuucciióónn:: PP11==PP22
PP1100..ZZ==110000
AArriittmmééttiiccaa:: ++,,--,,**,,//,,^̂,,......
CCoommppaarraacciióónn:: >>,,<<,,<<>>,,==>>,,<<==,,AANNDD,,OORR,,NNOOTT,,XXOORR......
FFuunncciioonneess:: MMAAXX,,MMIINN,,RRAADD,,SSQQRR,,TTAANN,,SSIINN,,CCOOSS,,TTAANN....
MMIITTSSUUBBIISSHHII EELLEECCTTRRIICC EEUURROOPPEE,, BB..VV.. SSuuccuurrssaall eenn EEssppaaññaa 4499















![Texto Manufactura Asistida Por Computadora 2013[2]](https://img.pdfslide.net/doc/110x75/55cf8e3c550346703b8ff37e/texto-manufactura-asistida-por-computadora-20132.jpg)













