Embed Size (px)
Citation preview

Introduction à l’analyse spectrale
P. Granjon, J-L. Lacoume

Table des matières
1 Propriétés énergétiques des signaux 21.1 Signaux à temps et fréquence continus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Signaux à temps et fréquence discrets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Transformée de Fourier discrète . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Techniques classiques d’estimation des grandeurs spectrales 52.1 Filtrage, quadration, intégration (FQI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Corrélogramme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3 Périodogramme moyenné . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3.1 Algorithme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.3.2 Quelques fonctions d’apodisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.4 Autres techniques d’estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 Calibrage 93.1 Les 2 principes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.2 Signaux à spectre continu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.2.1 Calcul du facteur de calibrage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2.2 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.3 Signaux à spectre discret . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.3.1 Calcul du facteur de calibrage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.3.2 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.3.3 Quelques remarques sur les signaux à spectre de raies . . . . . . . . . . . . . . . . 11
3.4 Signaux mixtes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.4.1 Effet du calibrage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.4.2 Contraste raies/fond du spectre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.4.3 Fréquences positives/négatives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4 Addition de zéros (zero padding) 144.1 Effet de l’échantillonnage fréquentiel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144.2 Interpolation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5 Fenêtres d’apodisation 16
6 Résolution fréquentielle 17
7 Variance d’estimation 19
8 Conclusion 21
1

Chapitre 1
Propriétés énergétiques des signaux
Dans ce cours d’introduction, tous les signaux sont supposés aléatoires stationnaires, c’est à dire queleurs propriétés statistiques sont invariantes par translation temporelle.
1.1 Signaux à temps et fréquence continus
Les propriétés énergétiques (données par des statistiques d’ordre 2) des signaux aléatoires stationnairesà temps continu sont résumées à la figure 1.1.Les figures 1.2, 1.3, 1.4 et 1.5 donnent des exemples de fonctions de corrélation et de densités spectrales
Fonction de corrélationCx(τ)
Densité spectraleSx(ν)
Signalx(t) Sx(ν) = TF [Cx(τ)]
Théorème de Wiener-Kinchine
Figure 1.1 – Propriétés énergétiques des signaux à temps et fréquence continus
de puissance (DSP) pour des signaux que vous rencontrerez classiquement par la suite.– Les signaux ne comportant aucune partie périodique sont à spectre purement continu (Fig. 1.2 et
1.3).– Les signaux purement périodiques ont un spectre purement discret, également appelé «spectre de
raies» (Fig. 1.4).– Les signaux mixtes, comportant une partie périodique et une partie non périodique, ont des spectres
comportant à la fois une partie continue et une partie discrète. Ce sont ces signaux qui sont le pluscouramment rencontrés dans le domaine de l’énergie.
1.2 Signaux à temps et fréquence discrets
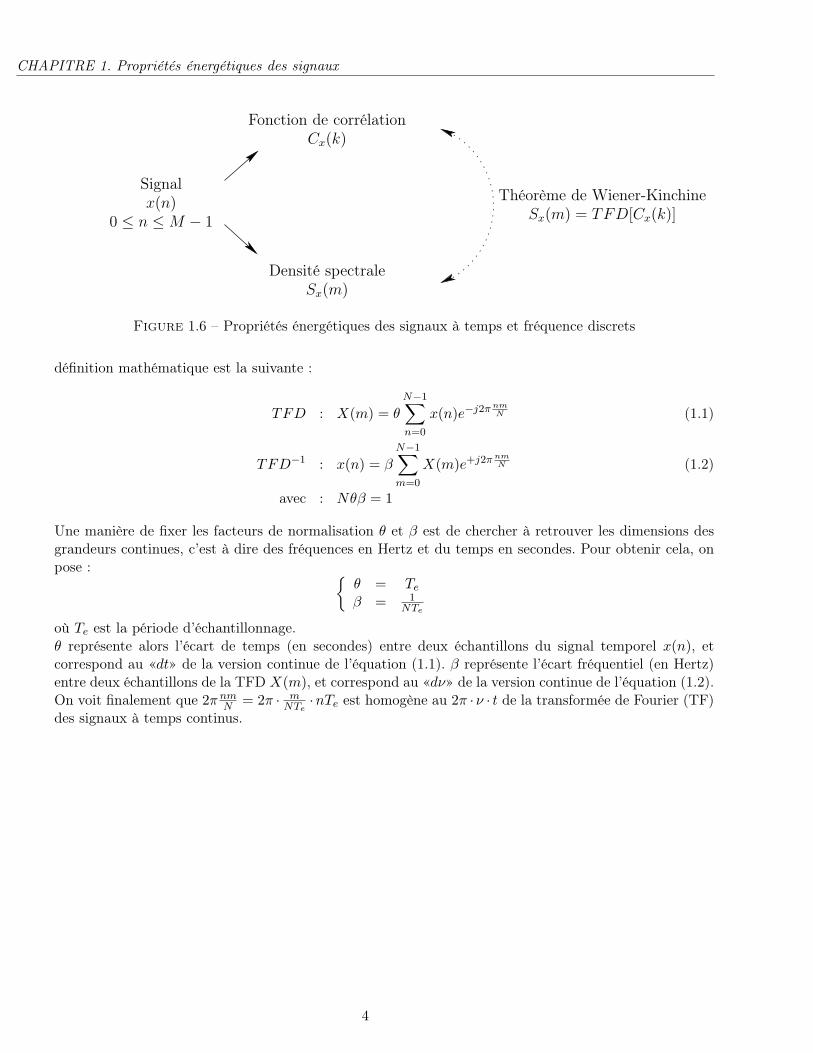
Les propriétés énergétiques des signaux aléatoires stationnaires à temps et à fréquence discrets sontrésumées à la figure 1.6. Dans la suite, nous supposerons toujours que les signaux dont nous disposons
2

CHAPITRE 1. Propriétés énergétiques des signaux
00τ(s) ν(Hz)
Cx(τ) = σ20δ(τ) Sx(ν) = σ2
0
Figure 1.2 – Bruit blanc (aucune partie périodique)
00τ(s) ν(Hz)
Sx(ν)Cx(τ)
Figure 1.3 – Bruit corrélé (aucune partie périodique)
00τ(s) ν(Hz)
Cx(τ) = périodique Sx(ν) spectre de raies
Figure 1.4 – Signal purement périodique
périodiquepartie partie
bruit
0τ(s) ν(Hz)
0
Cx(τ) Sx(ν)
Figure 1.5 – Signal mixte (une partie périodique et une partie non périodique)
sont à temps discret, et qu’ils ont été échantillonnés en vérifiant le théorème de Shannon. On pourraitredonner les mêmes exemples que dans le cas des signaux à temps continu, pour lesquels on obtiendraitsensiblement les mêmes résultats. Nous allons toutefois voir par la suite que l’échantillonnage en tempset en fréquence provoque de légers changements dans les résultats obtenus pour les spectres.
1.3 Transformée de Fourier discrète
Un outil nécessaire pour pouvoir calculer (ou plutôt faire calculer par un ordinateur) le spectre d’unsignal échantillonné est la transformée de Fourier discrète (TFD) directe et inverse sur N points. Sa
3
CHAPITRE 1. Propriétés énergétiques des signaux
Fonction de corrélation
Densité spectrale
Cx(k)
Sx(m)
Sx(m) = TFD[Cx(k)]
Signalx(n)
0 ≤ n ≤M − 1
Théorème de Wiener-Kinchine
Figure 1.6 – Propriétés énergétiques des signaux à temps et fréquence discrets
définition mathématique est la suivante :
TFD : X(m) = θN−1∑n=0
x(n)e−j2πnmN (1.1)
TFD−1 : x(n) = βN−1∑m=0
X(m)e+j2π nmN (1.2)
avec : Nθβ = 1
Une manière de fixer les facteurs de normalisation θ et β est de chercher à retrouver les dimensions desgrandeurs continues, c’est à dire des fréquences en Hertz et du temps en secondes. Pour obtenir cela, onpose : {
θ = Teβ = 1
NTe
où Te est la période d’échantillonnage.θ représente alors l’écart de temps (en secondes) entre deux échantillons du signal temporel x(n), etcorrespond au «dt» de la version continue de l’équation (1.1). β représente l’écart fréquentiel (en Hertz)entre deux échantillons de la TFD X(m), et correspond au «dν» de la version continue de l’équation (1.2).On voit finalement que 2π nmN = 2π · m
NTe·nTe est homogène au 2π · ν · t de la transformée de Fourier (TF)
des signaux à temps continus.
4

Chapitre 2
Techniques classiques d’estimation desgrandeurs spectrales
2.1 Filtrage, quadration, intégration (FQI)
Cette technique, décrite à la figue 2.1, est la plus ancienne. Elle réalise l’estimation du spectre d’unsignal à temps continu, et est donnée ici pour mémoire. Le premier étage est composé d’une batterie filtrestrès sélectifs, de fréquences centrales différentes. La sortie d’un de ces filtres correspond donc au contenu dusignal analysé autour de la fréquence centrale du filtre associé notée νc. Le second étage est une élévationau carré, et calcule donc la puissance instantannée du signal autour de la fréquence νc. Enfin, le troisièmeet dernier étage, réalise une intégration, et permet de calculer la puissance moyenne contenue dans le signalautour de νc. Il faut noter que les analyseurs de spectre très haute fréquence (permettant d’estimer des
1T
R T0dt
1T
R T0dt
(·)2
(·)2
x(t)
Sx(νN−1)
Sx(ν0)Fν0
FνN−1
Figure 2.1 – Filtrage, quadration, intégration
spectres jusqu’à plusieurs Gigahertz et utilisés par exemple en électromagnétisme) fonctionnent encoresuivant ce principe à cause des limites des convertisseurs numériques analogiques et des capacités destockage et de traitement des calculateurs actuels.
2.2 Corrélogramme
Cette technique est directement inspirée du théorème de Wiener-Kinchine. En effet, ce dernier nous ditque la DSP d’un signal est la TF de sa fonction de corrélation. Cette méthode estime donc tout d’abordla fonction de corrélation Cx(k) du signal discret x(n), puis en réalise la TFD (voir figure 2.2).
5

CHAPITRE 2. Techniques classiques d’estimation des grandeurs spectrales
corrélateur
h(k)
apodisation
TFD
calibrageA
x(t) cSx(m)
cCx(k)
Figure 2.2 – Corrélogramme
2.3 Périodogramme moyenné
2.3.1 Algorithme
La technique la plus utilisée actuellement est celle du périodogramme moyenné. Elle est issue d’unedéfinition alternative de la DSP, donnée par :
Sx(m) = limN→+∞
E[|X(m)|2
N
](2.1)
où E [·] représente l’espérence mathématique, et X(m) est définie par l’équation (1.1).Pour pouvoir calculer cette espérence mathématique, on doit disposer d’une infinité de réalisations dusignal aléatoire x(n). Or en pratique, on ne dispose le plus souvent que d’une seule de ses réalisations.Un moyen de contourner ce problème est de découper le signal x(n) en L «blocs» de N échantillons,espacés de P ≤ N échantillons. On suppose que les blocs ont suffisament d’échantillons (N suffisamentgrand) pour représenter correctement le signal à analyser. Chacun des blocs est alors considéré commeune réalisation de x(n). Ce principe de découpage est représenté graphiquement sur la figure 2.3.Il faut alors calculer la TFD de chacun des blocs. On calcule ensuite le module carré de ces TFD, que
décalage de
échantillonsP ≤ N
forme de la fonctiond’apodisation h(n)
x(n) observé sur M échantillons
bloc de N échantillons
Figure 2.3 – Découpage employé pour l’estimateur du périodogramme moyenné
l’on moyenne pour approcher l’espérence mathématique de l’équation (2.1).L’algorithme du périodograme moyenné peut donc être résumé comme suit :
1. Découper le signal en L blocs de longueur N ≤M et décalés de P ≤ N . Les apodiser par la fonctiond’apodisation h(n) choisie.
2. Appliquer une TFD sur chacun des blocs apodisés : Xi(m) = TFD [h(n)x(n− iP )] pour le bloc i.3. Prendre le module carré de chaque TFD et les moyenner.
Sx(m) =A
L
L−1∑i=0
|Xi(m)|2 (2.2)
6

CHAPITRE 2. Techniques classiques d’estimation des grandeurs spectrales
La grandeur Sx(m) est donc l’estimateur du périodogramme moyenné de la DSP, dont la valeur théoriqueest Sx(m).On peut noter que cet estimateur emploi exactement la même structure de calcul que la méthode FQIprésentée précédemment :
– TFD ⇔ filtrage par N filtres sélectifs,– module carré ⇔ quadration,– moyennage ⇔ intégration.
Les divers paramètres qu’il reste à régler correctement pour pouvoir l’employer sont :– le facteur de calibrage A,– la fonction d’apodisation h(n),– la longueur des blocs N ,– le décalage P .
Dans les chapitres suivants, nous allons étudier l’influence de ces divers paramètres.
2.3.2 Quelques fonctions d’apodisation
Il existe un grand nombre de fonctions d’apodisation. Voici les deux plus utilisées :
1. Fonction porte :– en temps : h(n) = 1 pour n = 0, . . . , N − 1 et 0 ailleurs.– en fréquence : H(m) = Nθδ(m) où δ(m) est une impulsion unité verifiant δ(m) = 1 pour m = 0
et 0 ailleurs.
2. Fonction de Hanning :– en temps : h(n) = 1
2
(1− cos 2πn
N
)pour n = 0, . . . , N − 1 et 0 ailleurs
– en fréquence : H(m) = Nθ(
12δ(m)− 1
4δ(m− 1)− 14δ(m+ 1)
).
L’allure temporelle et fréquentielle de ces deux fonctions d’apodisation pour N = 16 échantillons estdonnée à la figure 2.6
2.4 Autres techniques d’estimation
Il existe une multitude d’autres méthodes d’analyse spectrale spécifiques à certains types de signaux,mais celles-ci ne seront pas abordées ici. Toutefois, si vous voulez creuser un peu le sujet, vous pouvezconsulter les ouvrages suivants :
1. Méthodes et techniques de traitement du signal et applications aux mesures physiques, J. Max, J-L.Lacoume, Masson, 1996.
2. Digital Signal Processing, A-V. Oppenheim, R-W. Schafer, Prentice Hall, Englewood Cliffs, 1975.
3. Techniques modernes de traitement numérique des signaux, sous la direction de M. Kunt, Pressespolytechniques et universitaires romandes, 1991.
Cette liste est bien sûr loin d’être exhaustive...
7

CHAPITRE 2. Techniques classiques d’estimation des grandeurs spectrales
−5 0 5 10 15 200
0.2
0.4
0.6
0.8
1
echantillon n
x(n) = porte
−8 −6 −4 −2 0 2 4 60
0.2
0.4
0.6
0.8
1
canal frequentiel m
X(m)
Figure 2.4 – fonction porte
−5 0 5 10 15 200
0.2
0.4
0.6
0.8
1
x(n) = Hanning
echantillon n
−8 −6 −4 −2 0 2 4 6
−0.2
0
0.2
0.4
0.6
canal frequentiel m
X(m)
Figure 2.5 – fonction de Hanning
Figure 2.6 – Fonctions d’apodisation sur N = 16 échantillons
8

Chapitre 3
Calibrage
Le réglage du facteur de calibrage A introduit dans le chapitre précédent permet de choisir la grandeurspectrale d’ordre deux que l’on cherche à estimer. En effet, nous allons voir qu’il existe deux types decalibrages, l’un conduisant à l’estimateur de la densité spectrale de puissance, l’autre à l’estimateur duspectre de puissance.Dans la suite, on suppose que les gains des capteurs et des convertisseurs numériques/analogiques utiliséspour acquérir le signal ont été employés pour exprimer le signal discret en unités physiques. Par exemple,si le signal mesuré est une vitesse, l’amplitude du signal discret est exprimée en m.s−1, s’il s’agit d’unetension, l’amplitude est donnée en Volts, etc.
3.1 Les 2 principes
Le calibrage a pour principe d’étalonner les spectres. Deux types de calibrage, dépendant du type designaux traités, ont été développés :
– pour les signaux à spectre de raies, un calibrage correct conduit au spectre de puis-sance (SP) du signal physique. Celui-ci représentant la puissance contenue dans le signal à chaquefréquence, il s’exprime en unités physiques au carré.
– pour les signaux à spectre continu, un calibrage correct conduit à la densité spectralede puissance (DSP) du signal physique. Celle-ci étant une répartition par bande fréquentielle dela puissance contenue dans le signal, elle s’exprime en unités physiques au carré par Hertz.
Sx(m) étant la valeur théorique de la DSP, on montre qu’en moyenne, l’estimateur du périodogrammemoyenné Sx(m) vérifie la relation :
E[Sx(m)
]= Aβ
(|H|2 ∗ Sx
)(m)
= AβN−1∑µ=0
|H(m− µ)|2Sx(µ) (3.1)
où {β = 1
NT eH(m) = TFD [h(n)] , TFD de la fonction d’apodisation.
La relation (3.1) conduit à deux calibrages selon que :– la DSP de x est continue et supposée à variations lentes par rapport à Sh(m), DSP de la fonction
d’apodisation h,– la DSP de x est discrète (spectre de raies), et donc à variations rapides par rapport à Sh(m), DSP
de la fonction d’apodisation h.
9

CHAPITRE 3. Calibrage
3.2 Signaux à spectre continu
3.2.1 Calcul du facteur de calibrage
Dans cette situation, puisque Sx(m) varie lentement par rapport à Sh(m), elle peut être supposéeconstante sur la somme de l’équation (3.1), et être mise en facteur :
E[Sx(m)
]=
Aβ N−1∑µ=0
|H(µ)|2Sx(m) (3.2)
=
(Aθ
N−1∑n=0
|h(n)|2)Sx(m) (3.3)
La dernière égalité est donnée par la relation de Parseval appliquée aux signaux discrets :
θ
N−1∑n=0
x(n)y∗(n) = β
N−1∑m=0
X(m)Y ∗(m)
Pour avoir un estimateur non-biaisé, on impose E[Sx(m)
]= Sx(m). Pour que les équations (3.2) et (3.3)
vérifient cette propriété, le facteur de calibrage A doit donc prendre la valeur :
ADSP =1
θ∑N−1
n=0 |h(n)|2=
1
β∑N−1
m=0 |H(m)|2(3.4)
où θ = Te, β = 1NTe
, et la fonction d’apodisation h(n) est fixée par l’utilisateur.Dans le cas de signaux à spectre continu, le facteur de calibrage à appliquer sur l’estimateur du périodogram-me moyenné Sx(m) est donc donné par l’équation (3.4). Sx(m) est alors un estimateur non biaisé de laDSP du signal à analyser.
3.2.2 Exemples
Voici deux facteurs de calibrage calculés pour deux fonctions d’apodisation différentes :
Fonction porte :
ADSP =1
θ∑N−1
n=0 |h(n)|2=
1NTe
=1
durée de h en secondes
Fonction de Hanning :
ADSP =1
β∑N−1
m=0 |H(m)|2=
83NTe
=83
1durée de h en secondes
3.3 Signaux à spectre discret
3.3.1 Calcul du facteur de calibrage
On considère un signal sinusoïdal x(n) = α cos(2πm0
N n)avec m0 entier et < N
2 . La valeur théoriquede sa DSP est alors donnée par :
Sx(m) =α2
4β[δ(m−m0) + δ(m+m0)]
10

CHAPITRE 3. Calibrage
où δ(m) est une impulsion unité verifiant δ(m) = 1 pour m = 0 et δ(m) = 0 pour m 6= 0. Cette DSP estdonc bien discrète, puisqu’elle ne contient que deux points non nuls (pour m = ±m0).En appelant ASP le facteur de calibrage pour les signaux à DSP discrète, la relation (3.1) appliquée à laDSP précédente conduit à :
E[Sx(m)
]= ASP
α2
4
|H(m−m0)|2︸ ︷︷ ︸fréquences positives
+ |H(m+m0)|2︸ ︷︷ ︸fréquences négatives
(3.5)
La puissance totale de la sinusoïde α2
2 est répartie pour moitée en m = +m0 et pour moitié en m = −m0.La puissance contenue dans le signal à ces deux fréquences est donc égale à α2
4 . Pour avoir une grandeurspectrale fournissant exactement la puissance du signal contenue à la fréquence m, on doit donc imposer :
ASP =1
|H(0)|2=
1(θ∑N−1
n=0 h(n))2 (3.6)
où θ = Te, et où la fonction d’apodisation h(n) est fixée par l’utilisateur.Dans le cas de signaux à spectre discret, le facteur de calibrage à appliquer sur l’estimateur du périodogram-me moyenné Sx(m) est donc donné par l’équation (3.6). Sx(m) est alors un estimateur non biaisé du SPdu signal à analyser, puisqu’il donne la valeur de la puissance contenue dans le signal à chaque fréquencem.
Remarque On peut rencontrer dans la littérature des variantes de cette grandeur spectrale. En effet,en prenant la racine carrée du SP, on peut obtenir un «spectre d’amplitudes efficaces», s’exprimant enunités physiques efficaces. Dans l’exemple précédent, cette dernière grandeur serait donc égale à α
2 pourm = ±m0. Certains auteurs ont également défini une grandeur similaire pour les signaux à spectrescontinus en prenant la racine carrée de la DSP. Ceci conduit à une grandeur spectrale s’exprimant enunités physiques efficaces par racine de Hertz, ce qui n’a pas de signification physique précise. . .
3.3.2 Exemples
Voici deux facteurs de calibrage calculés pour deux fonctions d’apodisation différentes :Fonction porte :
ASP =1(
θ∑N−1
n=0 h(n))2 =
1(NTe)
2 =1
(durée de h en secondes)2
Fonction de Hanning :
ASP =1
|H(0)|2=
4(NTe)
2 =4
(durée de h en secondes)2
3.3.3 Quelques remarques sur les signaux à spectre de raies
1. La forme des raies en sortie de l’analyseur est imposée par celle de la TFD de la fonction d’apodi-sation H(m) (voir l’équation (3.5)).
2. Si la fréquence de la raie n’est pas entière, (m0 non entier), la valeur maximale donnée par l’esti-mateur Sx(m) est inférieure à la valeur théorique cherchée (effet de l’échantillonnage en fréquence).Nous reviendrons plus loin sur ce dernier point.
11

CHAPITRE 3. Calibrage
3.4 Signaux mixtes
3.4.1 Effet du calibrage
Un signal mixte est composé de la somme d’un signal à spectre continu (qui n’est donc pas périodique)et d’un signal à spectre discret (qui est donc purement périodique). Les résultats d’une analyse spectraleà l’ordre 2 d’un tel signal dépendent du calibrage choisi :
A = ADSP : On obtient alors une estimée de la DSP du signal qui est une caractéristique intrinsèquede la partie à spectre continu. Dans cette situation :– la partie continue de la DSP a une valeur indépendante des caractéristiques de l’analyseur (nombre
d’échantillons par bloc N , fonction d’apodisation h(n), . . . ),– la partie discrète de la DSP (les raies) dépend des caractèristiques de l’analyseur.
A = ASP : On obtient alors une estimée du SP du signal qui est une caractéristique intrinsèque de lapartie à spectre discret. Dans cette situation :– la partie discrète du SP (les raies) est indépendante des caractèristiques de l’analyseur.– la partie continue du SP a une valeur dépendant des caractéristiques de l’analyseur.
Un exemple est montré à la figure 3.3, où l’on a réalisé l’analyse spectrale d’un signal mixte avec 2nombres d’échantillons par bloc N différents. Le signal traité est composé d’un sinus de fréquence 0.0977et d’amplitude α = 0.1, et d’un bruit blanc centré de variance unitaire. La figure 3.1 montre le résultatobtenu avec le facteur de calibrage ADSP , alors que la figure 3.2 montre celui obtenu avec ASP . On voit
0.08 0.09 0.1 0.11 0.120.5
1
1.5
2
2.5
3
3.5
frequence reduite
DSP
N=256N=1024
Figure 3.1 – A = ADSP : estimation de la DSP
0.08 0.09 0.1 0.11 0.120
0.5
1
1.5
2
2.5
3x 10−3
frequence reduite
SP
N=256N=1024
Figure 3.2 – A = ASP : estimation du SP
Figure 3.3 – Analyse spectrale d’un signal mixte
que l’estimateur de la DSP (figure 3.1) donne bien une valeur unitaire pour la partie continue du spectrequel que soit N . Par contre, sa valeur change pour la raie à 0.0977 en fonction de N . Le comportementde l’estimateur du SP est strictement inverse, puisque seule la valeur prise à la fréquence 0.0977 estindépendante de N . De plus, on peut noter que pour cette fréquence, sa valeur est bien 0.0025 = α2
4 .Le calibrage choisi par l’utilisateur sera donc fonction de ce qui l’intéresse dans le signal :
– si il s’intéresse aux raies contenues dans le signal, il choisira plutôt A = ASP ,– si il s’intéresse à la «partie bruit» du signal, il choisira plutôt A = ADSP .
3.4.2 Contraste raies/fond du spectre
On peut également remarquer sur la figure 3.3 que la différence entre le maximum de la raie et le fondcontinu du spectre, appelée «contraste» augmente avec le nombre d’échantillons par bloc N . Pour illustrer
12

CHAPITRE 3. Calibrage
ce phénomène, considérons le signal traité précédemment (un sinus d’amplitude α et de fréquence m0 +du bruit b(n) sans partie périodique), et appliquons lui l’estimateur de la DSP. On peut montrer qu’à lafréquence de la raie m = m0, on obtient :
E[Sx(m0)
]=α2
4B+ Sb(m0) (3.7)
où B =β∑N−1
m=0 |H(m)|2
|H(0)|2=∑N−1
n=0 |h(n)|2
θ|∑N−1
n=0 h(n)|2et où Sb(m) est la DSP du bruit b(n) (3.8)
D’après l’équation (3.7), le contraste est dans ce cas égal à α2
4B , et dépend bien évidemment de l’ampli-tude de la raie, mais également du paramètre B (pouvant être interprété comme la bande passante del’analyseur). Or en utilisant (3.8), on montre que B est inversement proportionnel à N (par exempleBporte = 1
NTeet BHanning = 3
2NTe). Finalement, le contraste raies / fond continu du spectre est donc
directement proportionnel au nombre d’échantillons par bloc N , et croît avec lui. On pourrait menerexactement la même démarche sur le SP.
3.4.3 Fréquences positives/négatives
Les spectres obtenus avec le facteur de calibrage A répartissent la puissance du signal sur les fréquencespositives et négatives. Par suite de la parité des spectres pour les signaux réels, on les représente souventuniquement pour les fréquences positives. Afin de retrouver sur les seules fréquences positives la puissancetotale du signal analysé, on multiplie par deux les estimateurs, et leur facteur de calibrage devient :
A+ = 2A.
13

Chapitre 4
Addition de zéros (zero padding)
4.1 Effet de l’échantillonnage fréquentiel
L’estimateur du périodogramme moyenné nécessite le calcul de TFDs sur des blocs de N échantillons.On obtient alors un spectre échantillonné contenant N points (N2 pour les fréquences positives et N
2 pourles fréquences négatives). C’est ce que l’on appelle l’échantillonnage en fréquence.Pour les signaux à spectre de raies, en particulier, cette représentation peut être trompeuse. En effet, siune raie ne tombe pas exactement sur un des canaux en fréquence couverts par la TFD, l’échantillonnageen fréquence déforme fortement le spectre. Cet effet est illustré sur la figure 4.1. Elle représente le SPd’un signal formé de 2 sinusoïdes d’amplitude 1. La raie à la fréquence 0.1 tombe exactement sur un canalfréquentiel de la TFD, alors que ce n’est pas le cas pour celle à la fréquence 0.33. On voit que le SP de laraie ne tombant pas sur un canal de la TFD est déformé, et que son maximum est fortement atténué parrapport à la valeur théorique de 0.25.
0 0.1 0.2 0.3 0.4 0.50
0.05
0.1
0.15
0.2
0.25
frequence reduite
DSP
(en
linea
ire)
Figure 4.1 – Effet de l’échantillonnage fréquentiel sur le spectre des signaux à spectre de raies
14

CHAPITRE 4. Addition de zéros (zero padding)
4.2 Interpolation
Pour pallier ce défaut, il faut interpoler en fréquence, c’est à dire interpoler le spectre. Pour cela,avant de calculer les TFDs, on prolonge chaque bloc par des zéros, d’où le nom de la méthode. Commel’espacement entre deux échantillons du spectre (c’est à dire le pas en fréquence) est l’inverse de la duréedu bloc, on obtient bien une interpolation en fréquence. Il est recommandé de réaliser une interpolationsuffisante (les facteurs conseillés sont entre 8 et 16). La figure 4.2 représente, en regard des spectre initiaux,ceux obtenus avec une addition de zeros d’un facteur 16. Cette opération augmente la durée de calcul del’estimateur, mais elle permet de rendre l’amplitude des raies presque insensible à leur position vis-à-visdes canaux de la TFD.
0 0.1 0.2 0.3 0.4 0.50
0.05
0.1
0.15
0.2
0.25
frequence reduite
DSP
(en
linea
ire)
Figure 4.2 – Effet du zero padding (facteur 16)
Enfin, en observant les raies obtenues sur la TFD interpolée on voit apparaître les deux caractéristiquesprincipales des fonctions d’apodisation :
– leur lobe central qui «élargit» les raies et qui est lié au pouvoir de résolution,– leurs lobes secondaires qui «dispersent» l’énergie.
Nous allons étudier ces deux derniers points en détail dans le chapitre suivant.
15

Chapitre 5
Fenêtres d’apodisation
Nous donnons à la figure 5.1, en dB, le résultat fourni par l’estimateur du périodogramme moyennésur une raie avec les fonctions porte et de Hanning. On voit que le lobe central de la fonction de Hanningest plus large que celui de la fonction porte. On y voit également leurs lobes secondaires. Le premier lobesecondaire (le plus important), est à −13 dB pour la fonction porte et à −30 dB pour la fonction deHanning.
0.2 0.25 0.3−50
−45
−40
−35
−30
−25
−20
−15
−10
−5
0
frequence reduite
DSP
(en
dB)
porteHanning
Figure 5.1 – Fonctions d’apodisation porte et Hanning en fréquence (amplitude en dB)
La fonction porte est donc meilleure du point de vue pouvoir de résolution fréquentiel car son lobe centralest plus fin. Elle permettra donc de séparer plus facilement deux raies proches de même amplitude. Enrevanche, elle est moins performante pour les fuites d’énergie puisque ses lobes secondaires sont plusimportants. Elle aura donc tendance à masquer les raies proches de petite amplitude. Le choix de lafenêtre d’apodisation dépend donc des caractéristiques du signal à analyser.
Il existe d’autres fonctions d’apodisation qui ont un lobe central plus large que la fonction porte, maisqui atténuent plus fortement que la fonction de Hanning les lobes secondaires.
16

Chapitre 6
Résolution fréquentielle
Le pouvoir de résolution d’un analyseur de spectre caractérise son aptitude à séparer des raies. Pourpouvoir faire son étude théorique, on se place dans la représentation interpolée du spectre, ce qui permetde considérer que les signaux sont à temps continu.
Soit un signal à temps continu formé de deux raies de même amplitude α aux fréquences ν1 et ν2. Lespectre mesuré est, en fréquences positives, proportionnel à :
α2
4[|H(ν − ν1)|2 + |H(ν − ν2)|2
]Par définition, nous dirons que les raies sont séparées si le spectre présente deux pics différents. Cettedéfinition conduit au «pouvoir de résolution de Rayleigh». La figure 6.1 indique que le pouvoir de résolutionde Rayleigh est égal à la bande passante à 3 dB B3dB de la fonction d’apodisation : si l’écart fréquentiel∆ν entre les raies est supérieur à cette bande, les deux raies seront séparées sur le spectre et donc visibles.
ν
B3dB
raies séparées
∆ν
ν
raies non séparées
∆ν > B3dB
ν
∆ν
limite de Rayleigh
∆ν = B3dB ∆ν < B3dB
Figure 6.1 – Pouvoir de résolution de Rayleigh
Ce pouvoir de résolution dépend bien sûr de la fonction d’apodisation choisie, mais aussi du nombred’échantillons par bloc N utilisé pour l’estimateur du périodogramme moyenné. On montre que pour lesdeux fonctions d’apodisation précédemment étudiées, la bande passante à 3 dB est :
porte : 0.88durée de h(n) =
0.88NTe
Hanning : 1.42durée de h(n) =
1.42NTe
17

CHAPITRE 6. Résolution fréquentielle
Ces valeurs nous donnent deux indications :– la fonction porte a un meilleur pouvoir de résolution spectral que la fonction de Hanning,– le pouvoir de résolution de l’analyseur est inversement proportionnel à N .
Cette dernière remarque nous permet de conclure que plus le nombre d’échantillons par bloc N est élevé,meilleur sera le pouvoir de résolution de l’analyseur. Nous verrons dans le chapitre suivant que choisir unN élevé n’a pas que des avantages.
Le signal, dont l’analyse spectrale est montrée à la figure 6.2, contient deux sinusoïdes d’amplitudeségales, et de fréquences très proches 0.1 et 0.11. Les figures de gauche montrent les résultats obtenus avec
0.06 0.08 0.1 0.12 0.140
0.2
0.4
0.6
0.8
1Porte
DSP
(en
linea
ire)
0.06 0.08 0.1 0.12 0.140
0.2
0.4
0.6
0.8
1Hanning
0.06 0.08 0.1 0.12 0.140
0.2
0.4
0.6
0.8
1
frequence reduite
Hanning
0.06 0.08 0.1 0.12 0.140
0.2
0.4
0.6
0.8
1
frequence reduite
DSP
(en
linea
ire)
Porte
N = 88 N = 88
N = 150 N = 150
Figure 6.2 – Résolution fréquentielle en fonction de N et h(n)
la fonction porte, alors que celles de droite ont été obtenues avec la fontion de Hanning. On voit que lafonction porte permet de séparer ces deux raies pour un nombre de points plus faible que la fonction deHanning. Il faut toutefois garder à l’esprit que si une des raies avait été beaucoup plus faible que l’autre,le phénomène des fuites d’énergies nous aurait conduit à choisir quand même la fonction de Hanning (voirle chapitre précédent).
18

Chapitre 7
Variance d’estimation
Pour un signal aléatoire, l’estimateur du périodogramme moyenné Sx(m) est une variable aléatoire.Lors de l’étude sur le calibrage, nous avons étudié sa valeur moyenne (E
[Sx(m)
]). Pour étudier correc-
tement cette variable aléatoire, nous devons également nous intéresser à sa variance, qui caractérise sadispersion.
On montre que pour un signal aléatoire gaussien, la variance relative de Sx(m) est donnée par :
Var[Sx(m)
]S2x(m)
=1L
où L est le nombre de blocs sur lequel on a moyenné (voir équation (2.2)).On en déduit que l’opération de moyennage est nécessaire pour diminuer la dispersion des mesures
lorsque le signal contient une partie aléatoire. De plus, plus ce moyennage est important, plus l’estimateurdu périodogramme moyenné tendra vers la valeur théorique du spectre. Cet effet est illustré par la figure7.1, où Sx(m) a été employé pour estimer la DSP d’un bruit blanc gaussien de variance unitaire. La valeurthéorique de la DSP de ce signal est 1, quelle que soit la fréquence m. On voit que plus le moyennage estimportant, meilleure est l’estimation.
Ce résultat influe directement sur le choix du nombre d’échantillons par bloc N . En effet, en pratique,on dispose le plus souvent d’un signal avec un nombre d’échantillons fini. Pour avoir une bonne résolutionfréquentielle, on a tendance à choisir un N important. Malheureusement, ce choix conduit à un nombrede blocs L faible. Si le signal à analyser est fortement bruité, il faudra veiller à augmenter L (et donc àdiminuer N) afin de minimiser la dispersion des mesures.
Afin d’augmenter le nombre de blocs pour un signal de longueur finie, on peut également diminuer ledécalage P entre les blocs (voir l’algorithme du périodogramme moyenné détaillé au paragraphe 2.3.1).Toutefois, on montre que pour P < N
4 , la variance d’estimation ne diminue plus de manière significative.La valeur généralement employée pour P est située entre N
4 et N2 .
Pour trouver un juste milieu, on peut s’appuyer sur les idées suivantes. Le point fondamental est quel’on doit avoir des idées a priori sur le signal étudié (spectre continu ou de raies, signal mixte, quantitéde bruit, etc.) et sur les objectifs de l’analyse (étudier l’amplitude des raies, séparer deux raies proches,étudier le bruit, etc.). C’est ici que se noue le lien entre les méthodes de traitement et la connaissance quevous avez du système à analyser. Ainsi, si l’on cherche des raies espacées de ∆ν Hertz, il faut avoir unpouvoir de résolution supérieur à ∆ν, et donc une durée des blocs supérieure à 1
∆ν secondes. A contrario,si le signal est fortement bruité, pour diminuer la variance de la mesure, on doit prendre un nombresuffisant de blocs. . .
19

CHAPITRE 7. Variance d’estimation
0 0.1 0.2 0.3 0.4 0.50
2
4
6
DSP
(en
linea
ire)
sans moyennage
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
2
4
6
DSP
(en
linea
ire)
5 moyennages
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
2
4
6
DSP
(en
linea
ire)
500 moyennages
frequence reduite
Figure 7.1 – Variance d’estimation de l’estimateur du périodogramme moyenné
20

Chapitre 8
Conclusion
En conclusion, nous allons tenter d’énoncer quelques règles générales pour le réglage des divers para-mètres de l’estimateur du périodogramme moyenné.
Tout d’abord, dès que le signal à analyser contient une partie aléatoire (ce qui est le cas pour lamajorité des signaux réels), il faut employer l’estimateur du périodogramme moyenné. En effet, la TFDseule, en général calculée à l’aide d’un algorithme de FFT (Fast Fourier Transform), n’est valable quepour des signaux ne comportant absolument pas de bruit (type simulation).
On peut tenter de résumer le cours précédent en quelques principes fondamentaux :
Calibrage A : Le calibrage permet de fixer le type de grandeur spectrale que l’on veut estimer. Si l’ons’intéresse à la partie aléatoire non périodique du signal, on estime la DSP et A est choisi égal àADSP . Par contre, si on veut concentrer son étude sur la partie périodique, il vaut mieux estimer leSP et choisir A = ASP .
Addition de zéros : On emploi la technique du zero padding dans le cas d’un signal à spectre deraies. Ceci rend la valeur de l’estimateur du périodogramme moyenné insensible à la localisation enfréquence des raies étudiées.
Fonction d’apodisation h(n) : Elle est choisie d’une part en fonction de la résolution spectrale désirée,et d’autre part en fonction de l’amplitude relative des raies contenues dans le signal. En effet, pourune résolution maximale, la fonction porte sera préférée. Toutefois, en présence de raies d’amplitudestrès différentes, on préfère généralement la fonction de Hanning qui minimise les fuites d’énergie.
Nombre d’échantillons par bloc N : Ce nombre est fonction de la résolution spectrale désirée, etde la quantité de bruit contenue dans le signal. On choisira un N suffisament élevé pour obtenirune résolution suffisante, tout en conservant un nombre de bloc L assez grand pour minimiser ladispersion des mesures de l’estimateur, qui est due au bruit.
Décalage P entre blocs : Ce décalage est en général choisi entre N4 et N
2 . Ceci permet de diminuer lavariance d’estimation, tout en n’augmentant pas trop le temps de calcul.
21









![COURSchamilo2.grenet.fr/inp/courses/.../document/Partie_temps_echelle_1.pdf · Bibliographie [1] D. Gabor, Theory of communications,J. IEE, Vol. 93, No3 , pp 429-457, 1946. [2] J](https://img.pdfslide.net/doc/110x75/5b9833f909d3f2210c8bbac0/-bibliographie-1-d-gabor-theory-of-communicationsj-iee-vol-93-no3-.jpg)








![Part 2: Advanced methodschamilo2.grenet.fr/inp/courses/ENSIMAG4MMG3D6/document/slides/10... · Part 2: Advanced methods Chapter 3: Animating complex objects 1. ... Cani, SCA’02]](https://img.pdfslide.net/doc/110x75/5c66794f09d3f2e33b8c2682/part-2-advanced-part-2-advanced-methods-chapter-3-animating-complex-objects.jpg)










