Embed Size (px)
Citation preview
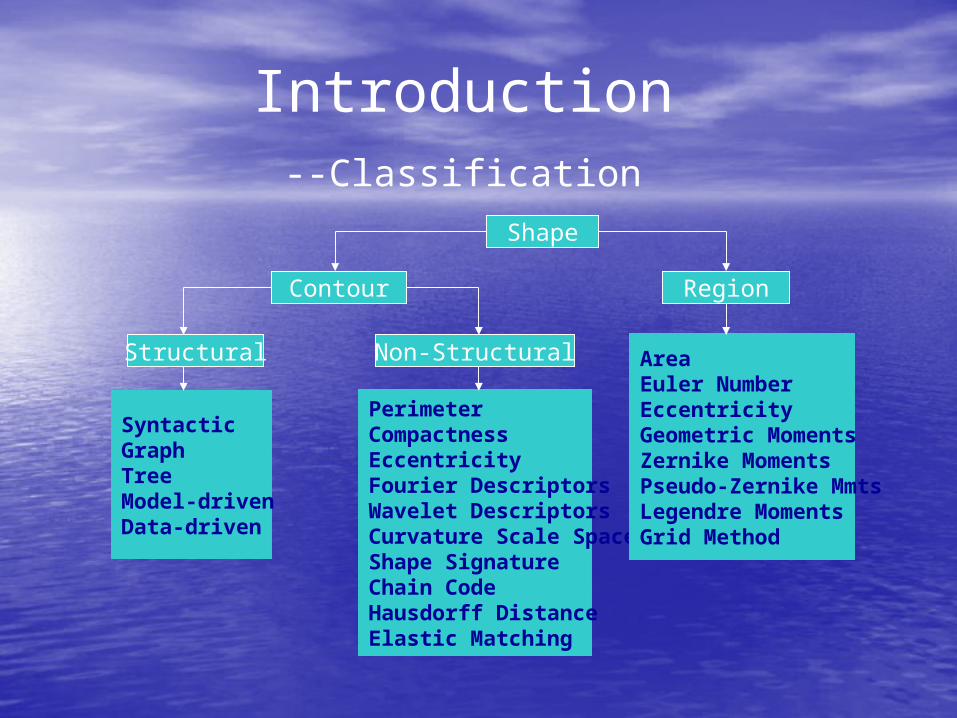
Introduction--Classification
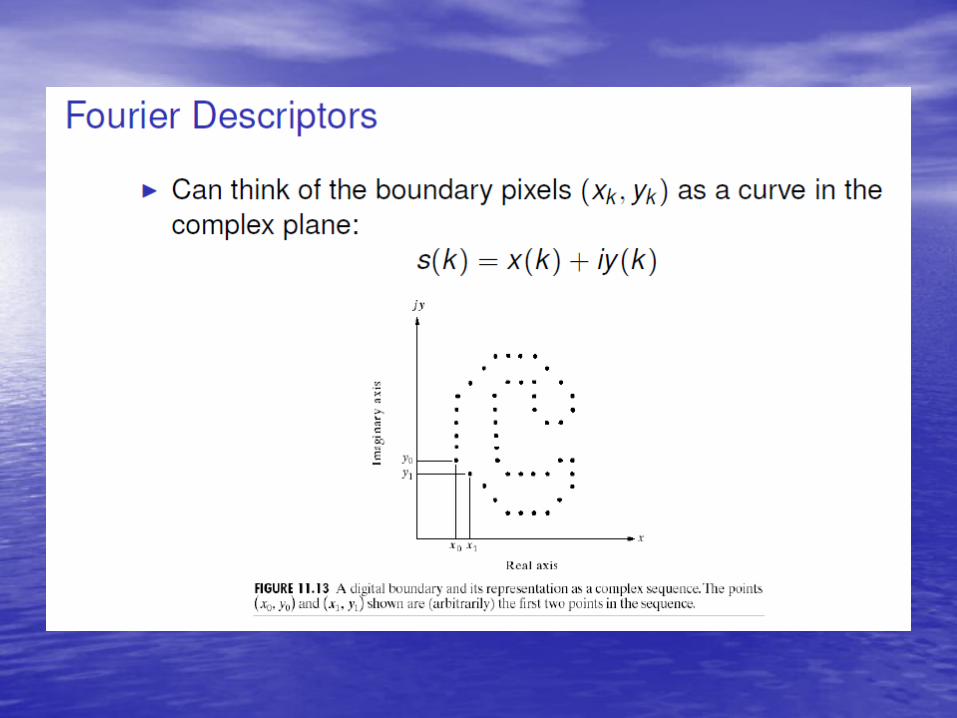
Shape
Contour Region
Structural
SyntacticGraphTreeModel-drivenData-driven
PerimeterCompactnessEccentricityFourier DescriptorsWavelet DescriptorsCurvature Scale SpaceShape SignatureChain CodeHausdorff DistanceElastic Matching
Non-Structural AreaEuler NumberEccentricityGeometric MomentsZernike MomentsPseudo-Zernike MmtsLegendre MomentsGrid Method
Boundary DescriptorsBoundary Descriptors
• There are several simple geometric measures that can be useful for describing a boundary. – The length of a boundary: the number of
pixels along a boundary gives a rough approximation of its length.
– Curvature: the rate of change of slope• To measure a curvature accurately at a point
in a digital boundary is difficult• The difference between the slops of adjacent
boundary segments is used as a descriptor of curvature at the point of intersection of segments
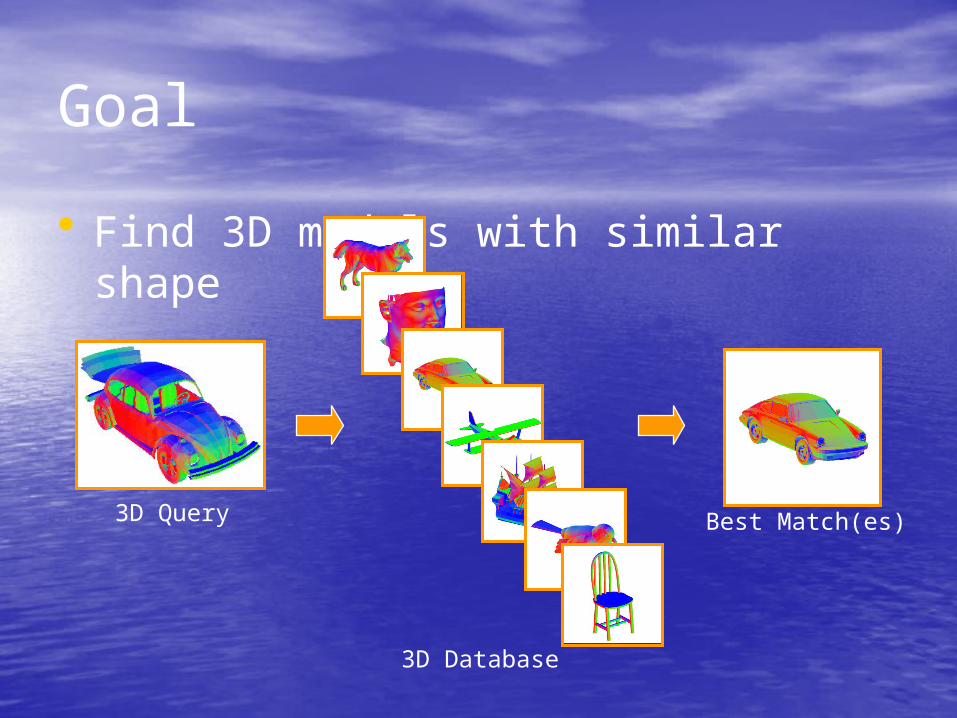
Goal
• Find 3D models with similar shape
3D Query
3D Database
Best Match(es)
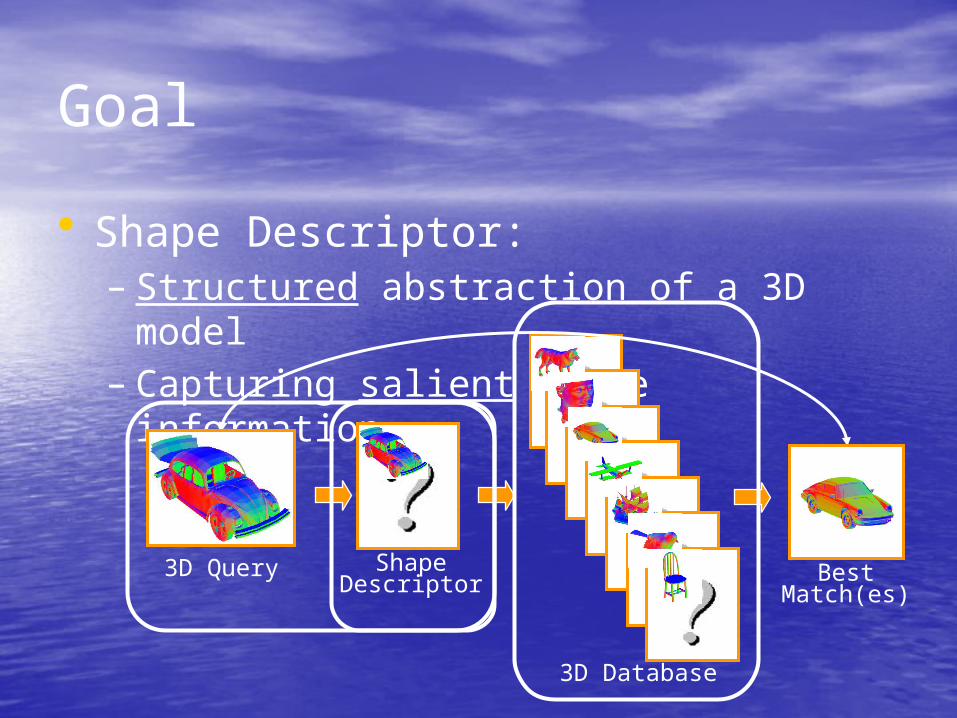
Goal
• Shape Descriptor:– Structured abstraction of a 3D model– Capturing salient shape information
3D Query ShapeDescriptor
3D Database
BestMatch(es)
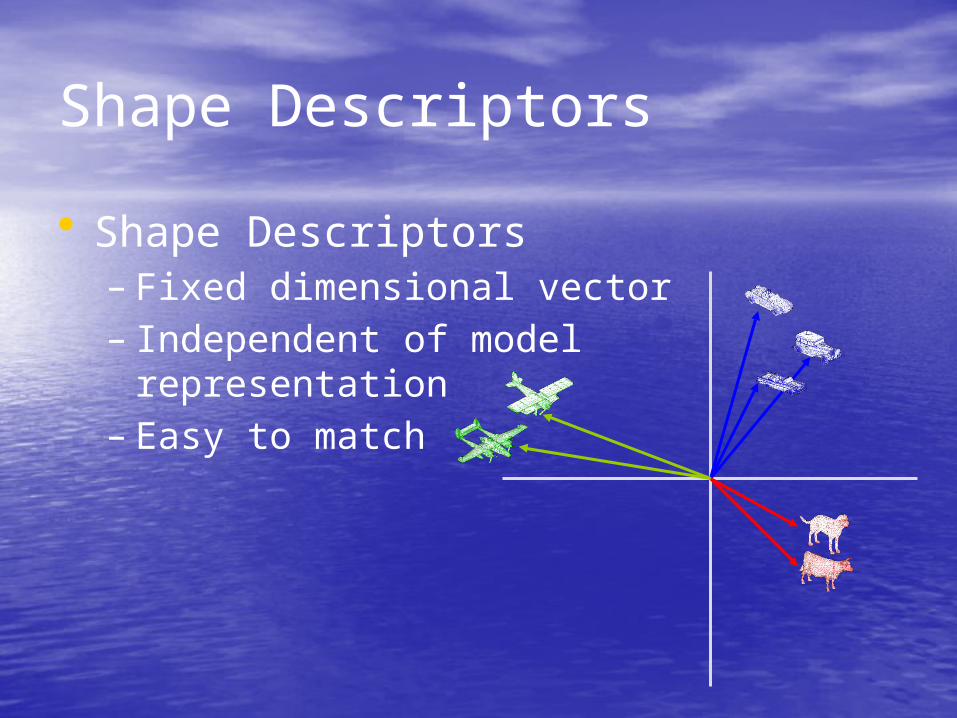
Shape Descriptors
• Shape Descriptors– Fixed dimensional vector– Independent of model representation– Easy to match
Shape Descriptors
• Representation:– What can you represent?– What are you representing?
• Matching:– How do you align?– Part or whole matching?
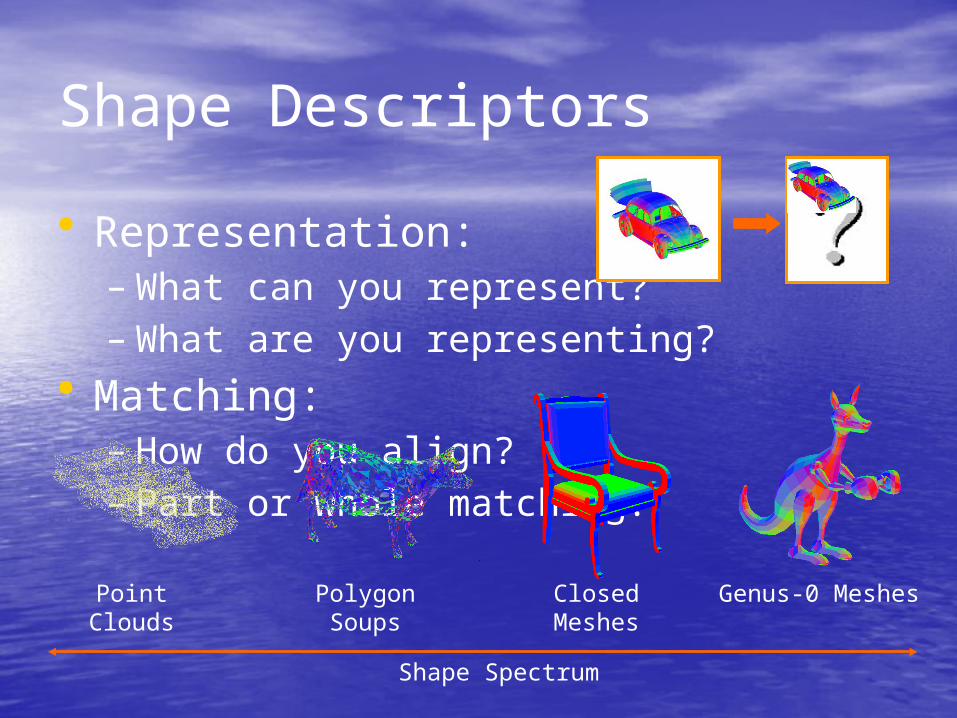
Shape Descriptors
• Representation:– What can you represent?– What are you representing?
• Matching:– How do you align?– Part or whole matching?
Point Clouds
Polygon Soups
Closed Meshes
Genus-0 Meshes
Shape Spectrum
Shape Descriptors
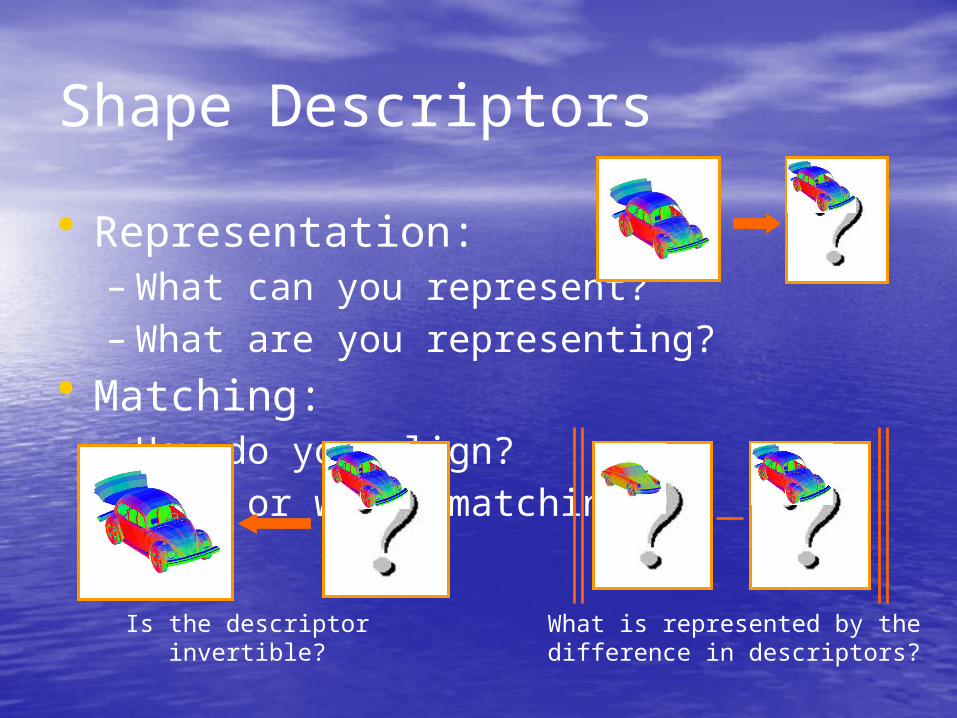
• Representation:– What can you represent?– What are you representing?
• Matching:– How do you align?– Part or whole matching?
Is the descriptor invertible? What is represented by the difference in descriptors?
Shape Descriptors
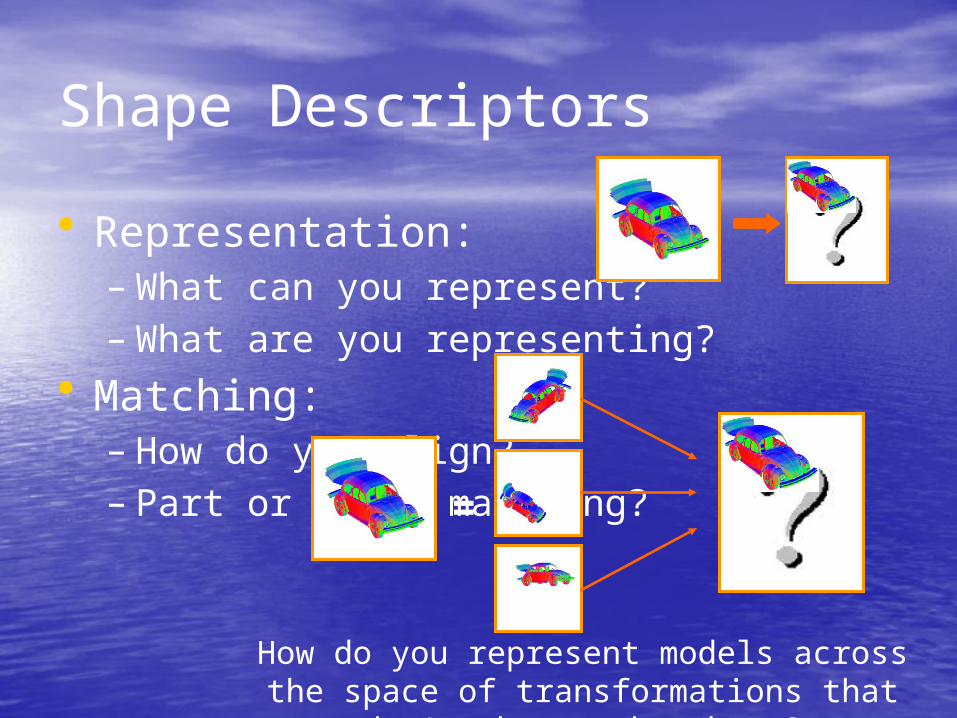
• Representation:– What can you represent?– What are you representing?
• Matching:– How do you align?– Part or whole matching?=
How do you represent models across the space of transformations that don’t change the shape?
Shape Descriptors
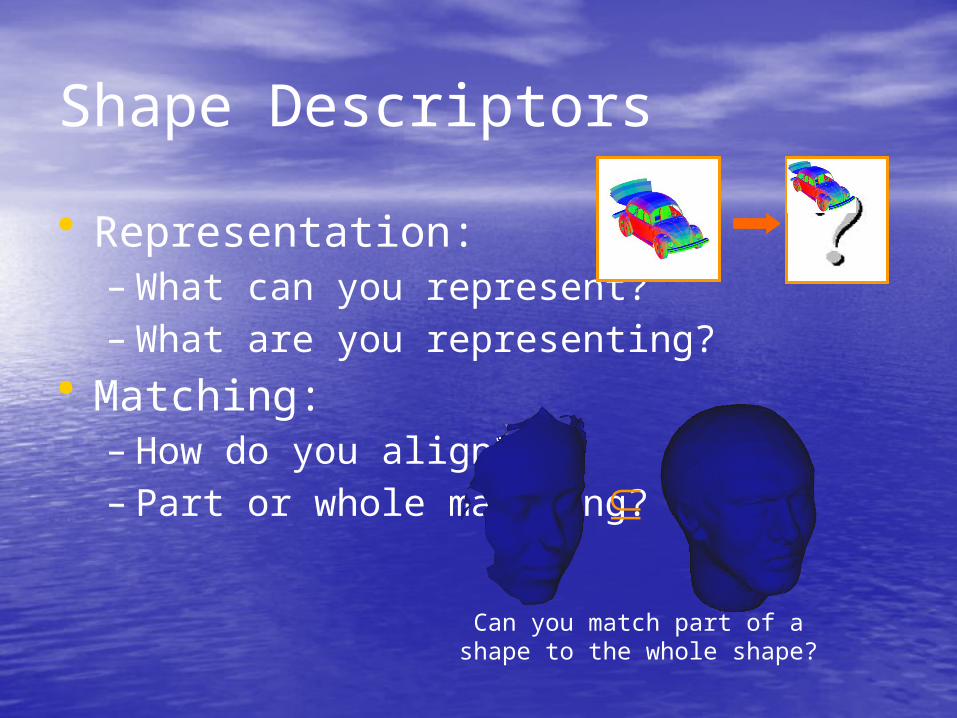
• Representation:– What can you represent?– What are you representing?
• Matching:– How do you align?– Part or whole matching?
Can you match part of a shape to the whole shape?
Outline
Why shape descriptors? How do we represent shapes?
– Volumetric Representations– Surface Representations– View-Based Representations
Conclusion

Volumetric Representations
• Represent models by the volume that they occupy:
Rasterize the models into a binary voxel grid– A voxel has value 1 if it is inside the
model– A voxel has value 0 if it is outside
ModelVoxel Grid
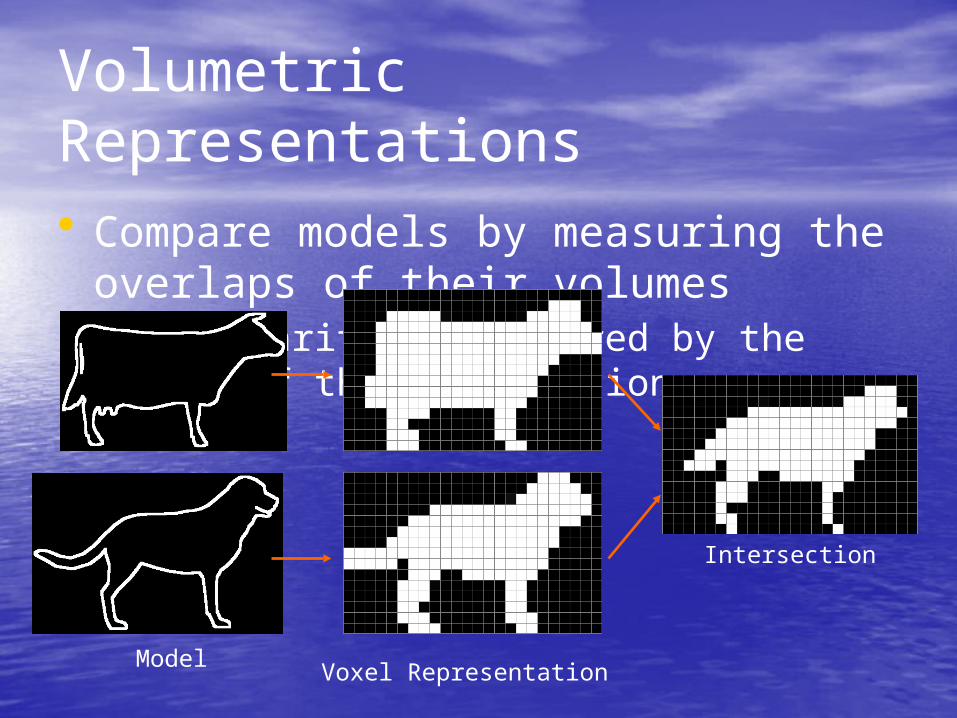
Volumetric Representations
• Compare models by measuring the overlaps of their volumes– Similarity is measured by the size of the
intersection
Intersection
Voxel RepresentationModel
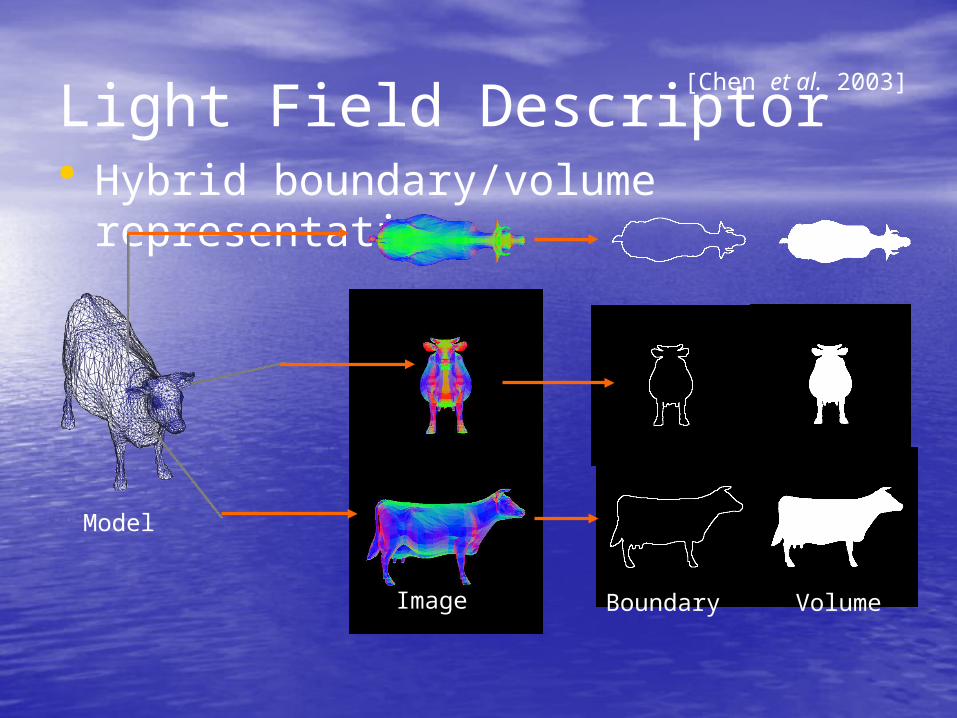
Light Field Descriptor• Hybrid boundary/volume
representation
Model
Image Boundary Volume
[Chen et al. 2003]
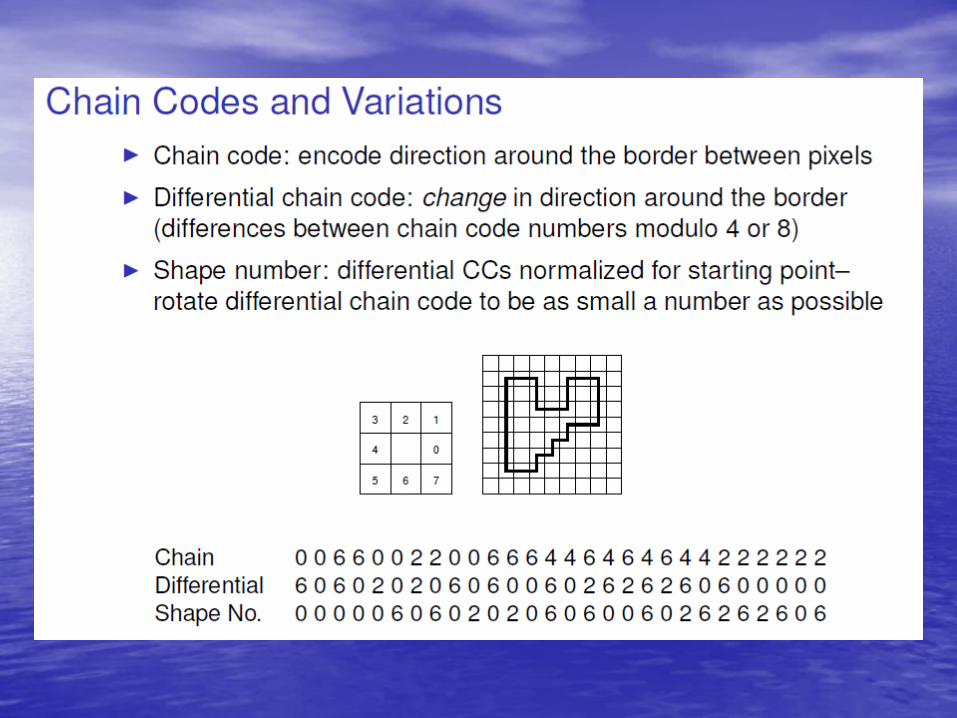
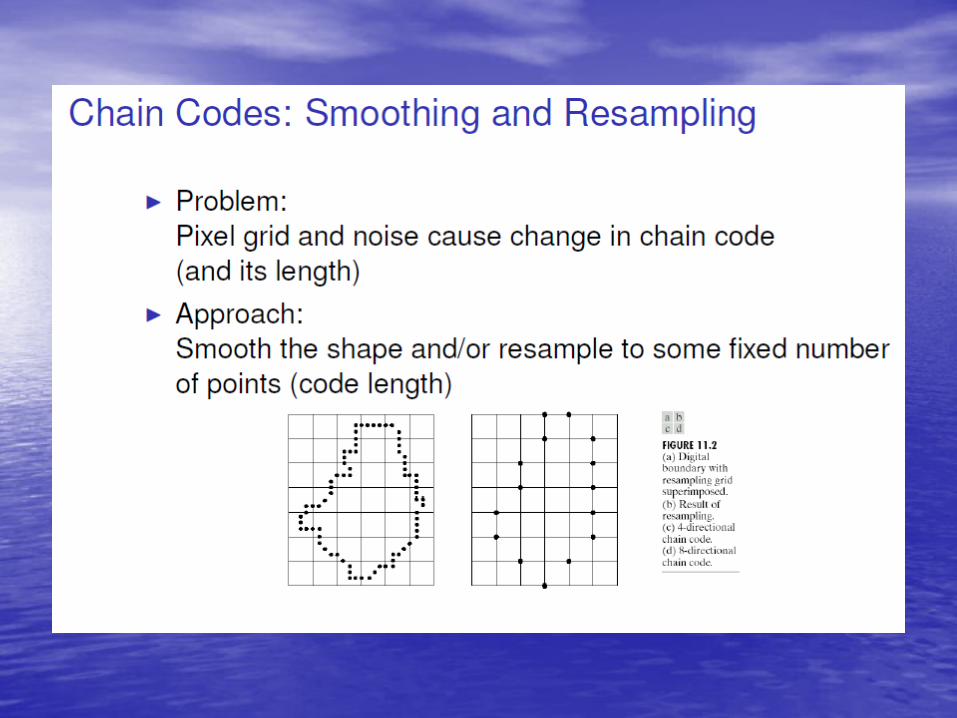
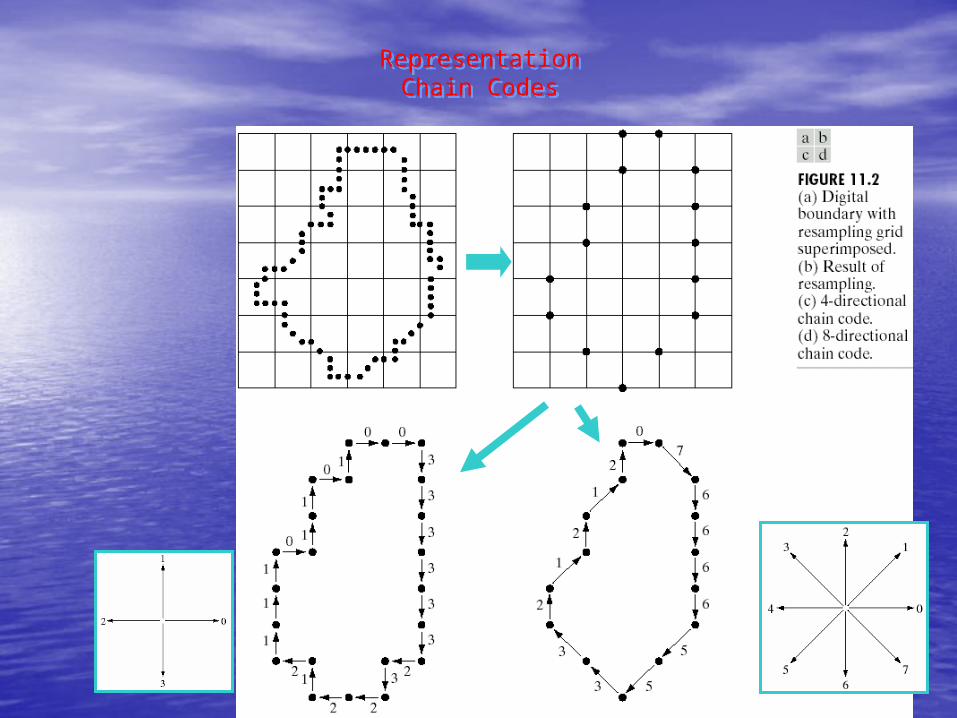
RepresentationChain Codes
RepresentationChain Codes
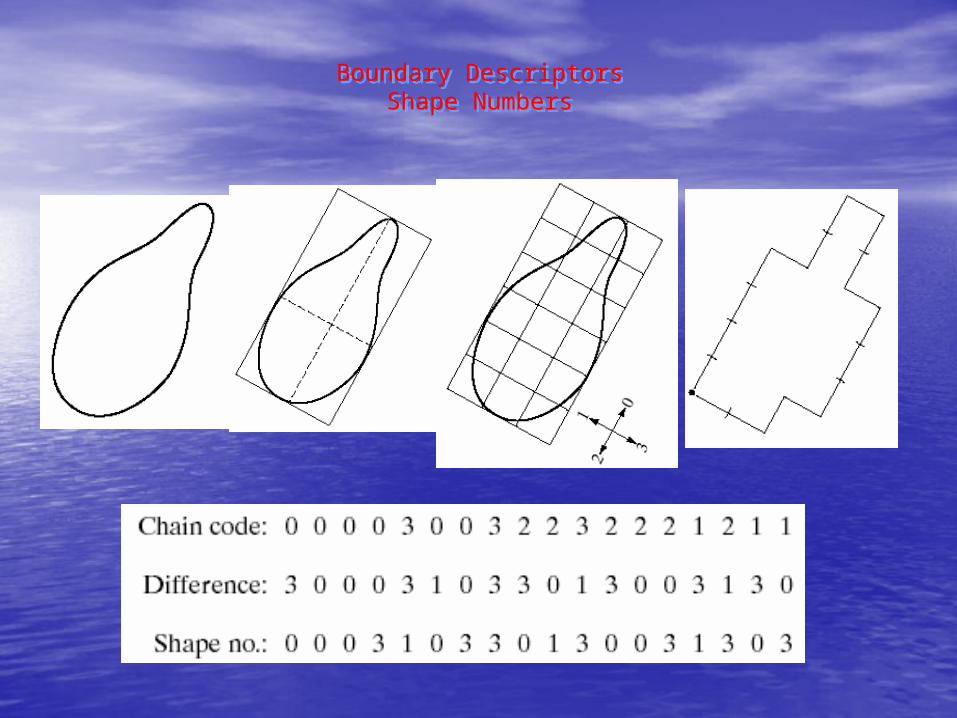
Boundary DescriptorsShape Numbers
Boundary DescriptorsShape Numbers
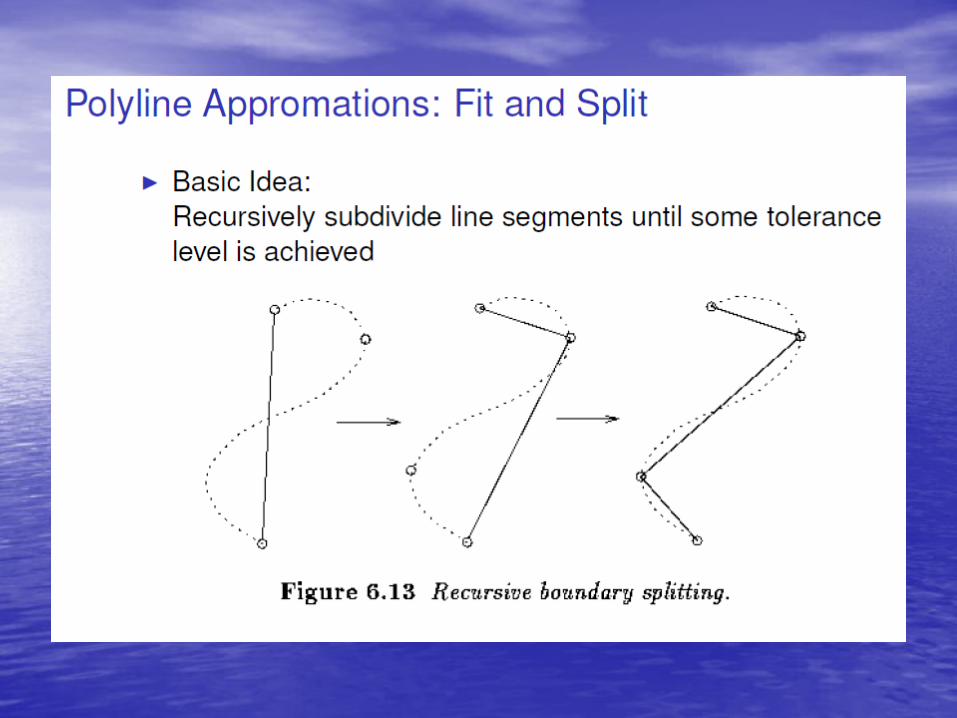
RepresentationPolygonal Approximations
RepresentationPolygonal Approximations
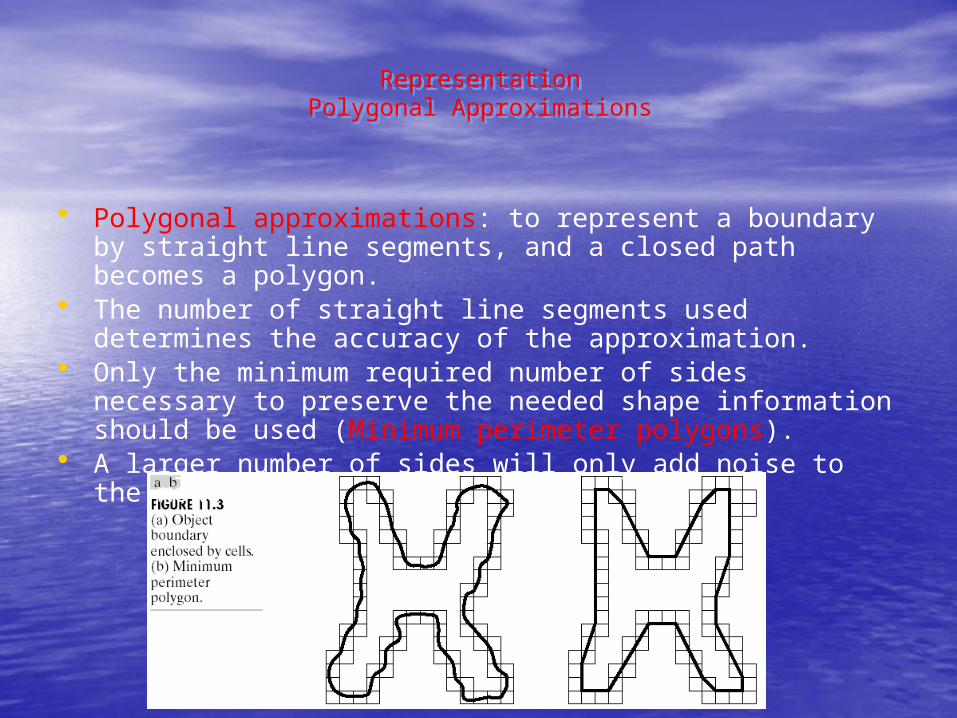
• Polygonal approximations: to represent a boundary by straight line segments, and a closed path becomes a polygon.
• The number of straight line segments used determines the accuracy of the approximation.
• Only the minimum required number of sides necessary to preserve the needed shape information should be used (Minimum perimeter polygons).
• A larger number of sides will only add noise to the model.
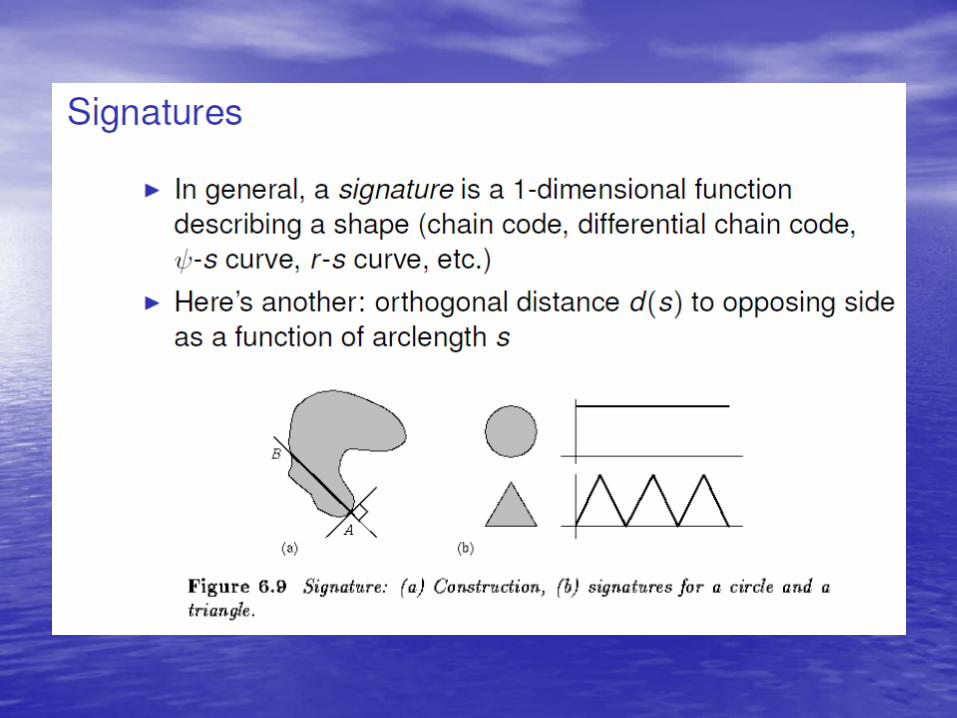
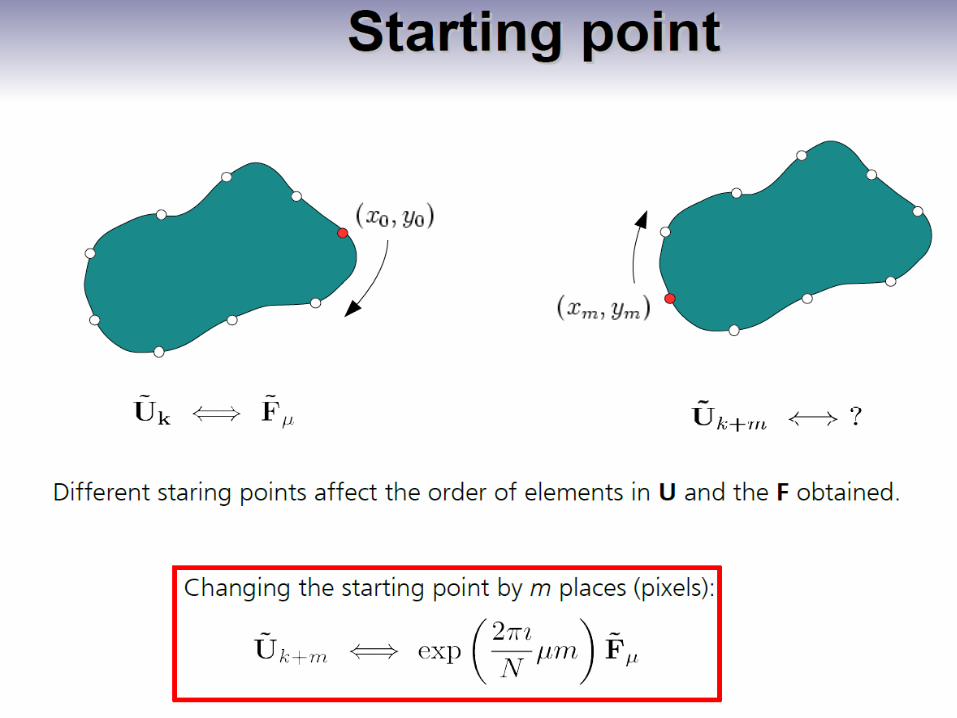
• Signatures are invariant to location, but will depend on rotation and scaling. – Starting at the point farthest from the
reference point or using the major axis of the region can be used to decrease dependence on rotation.
– Scale invariance can be achieved by either scaling the signature function to fixed amplitude or by dividing the function values by the standard deviation of the function.
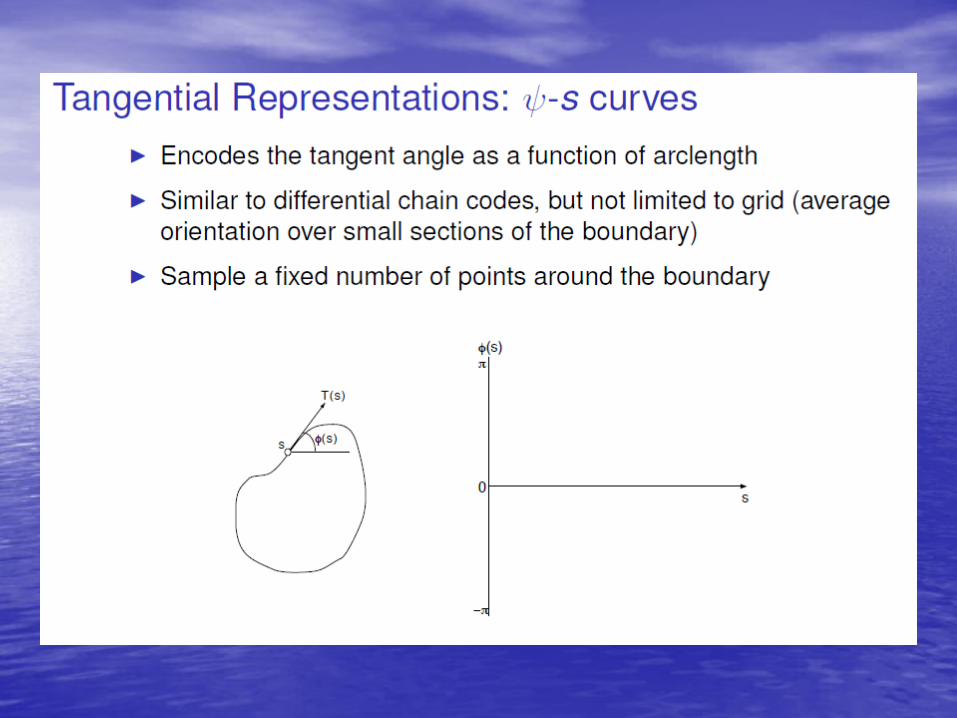
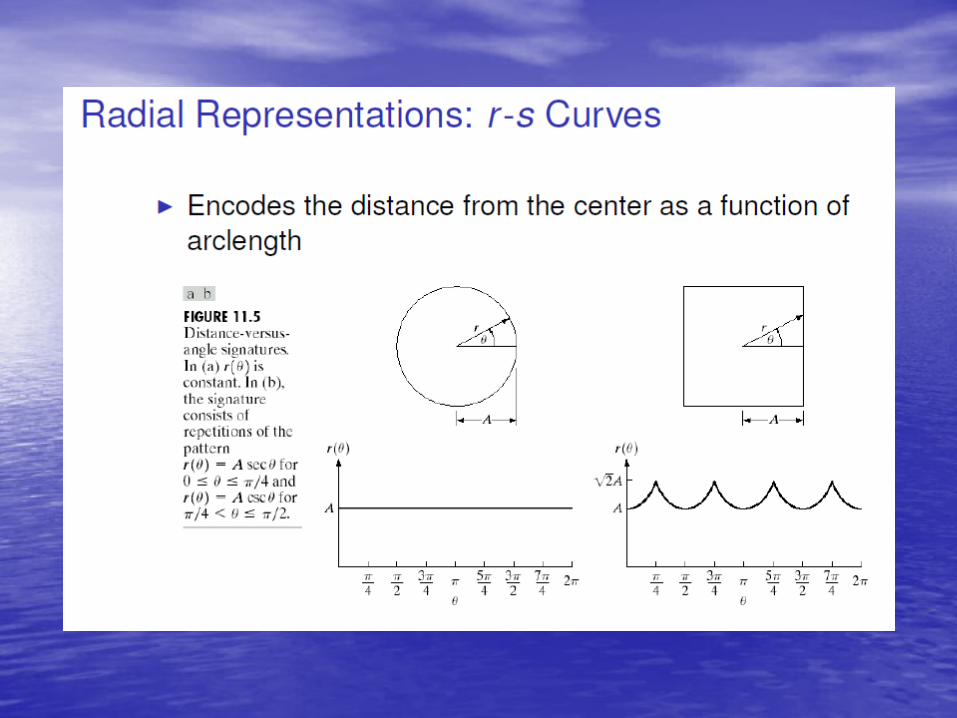
RepresentationSignature
RepresentationSignature

RepresentationPolygonal Approximations
RepresentationPolygonal Approximations
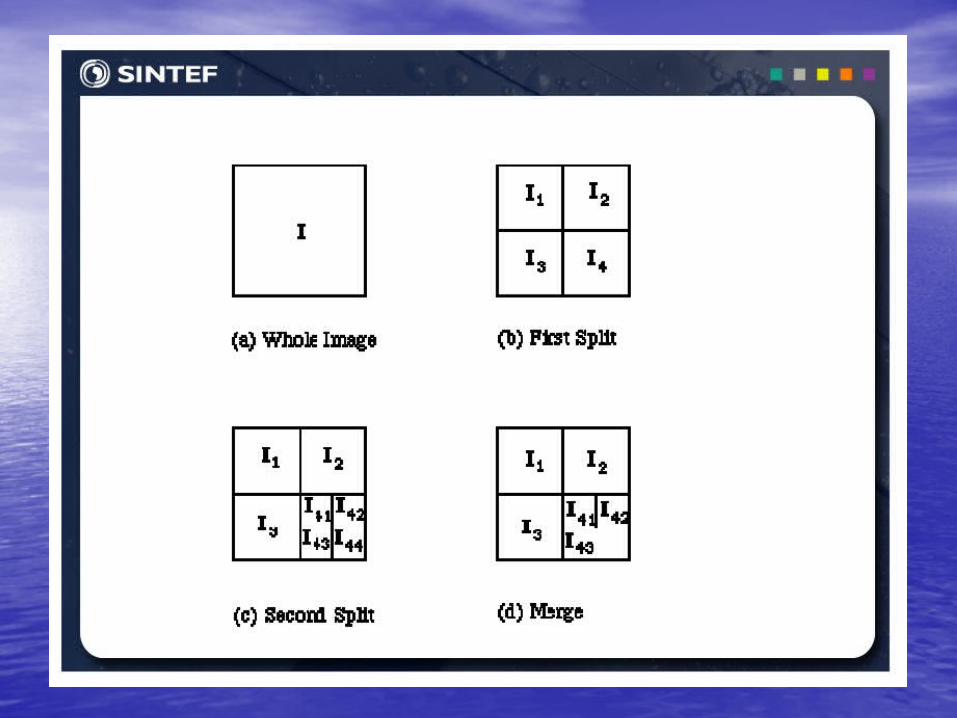
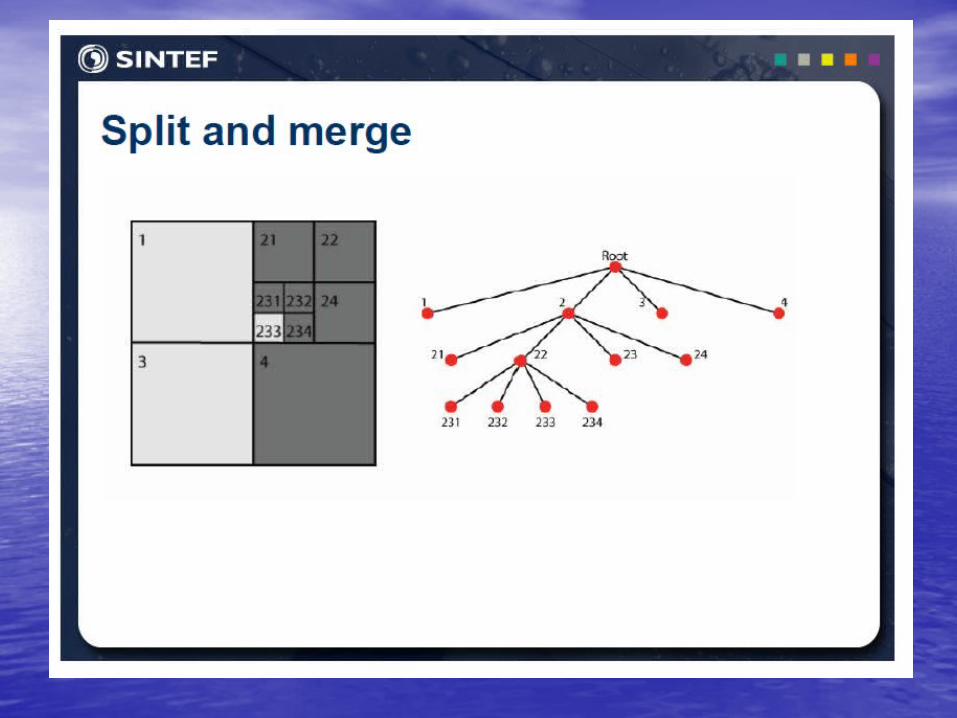
• Minimum perimeter polygons: (Merging and splitting)– Merging and splitting are often used together to
ensure that vertices appear where they would naturally in the boundary.
– A least squares criterion to a straight line is used to stop the processing.


RepresentationSkeletons
RepresentationSkeletons
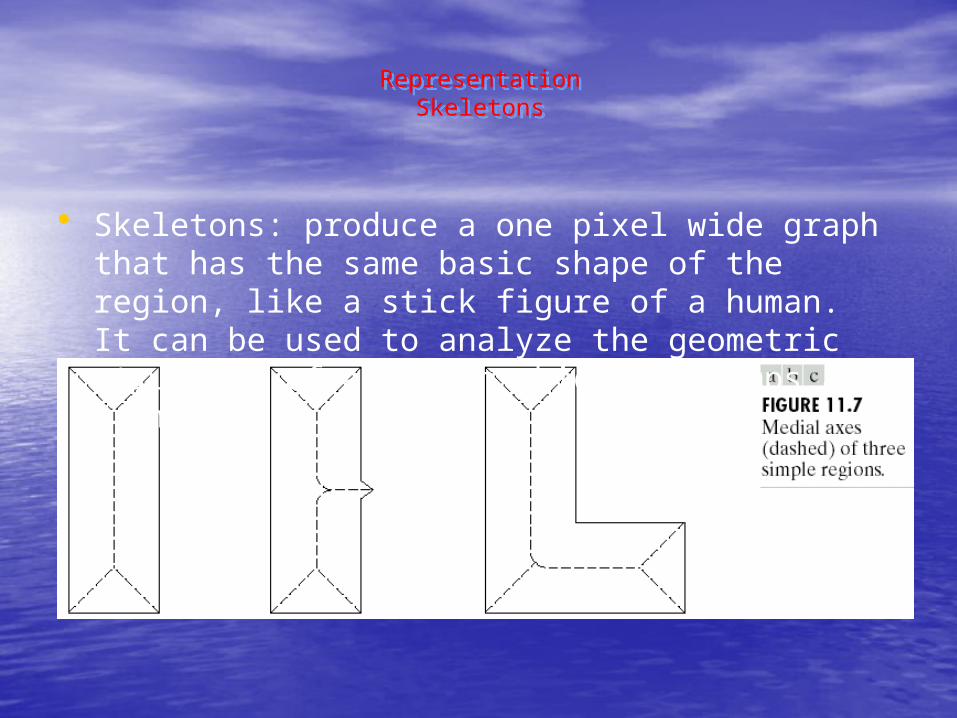
• Skeletons: produce a one pixel wide graph that has the same basic shape of the region, like a stick figure of a human. It can be used to analyze the geometric structure of a region which has bumps and “arms”.
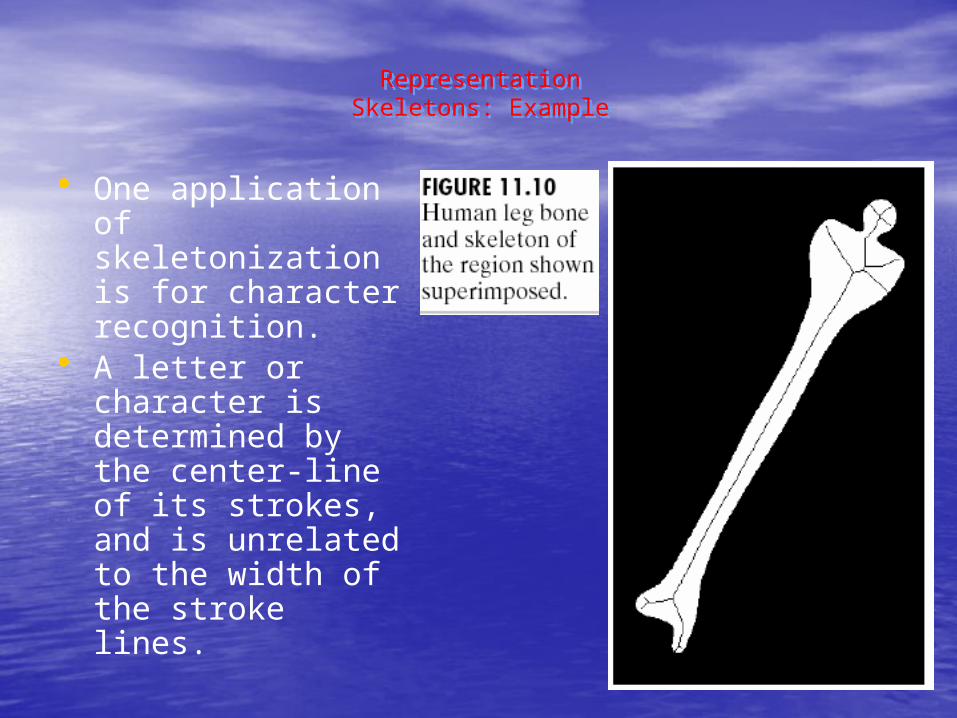
• One application of skeletonization is for character recognition.
• A letter or character is determined by the center-line of its strokes, and is unrelated to the width of the stroke lines.
RepresentationSkeletons: Example
RepresentationSkeletons: Example
Regional DescriptorsTopological DescriptorsRegional Descriptors
Topological Descriptors
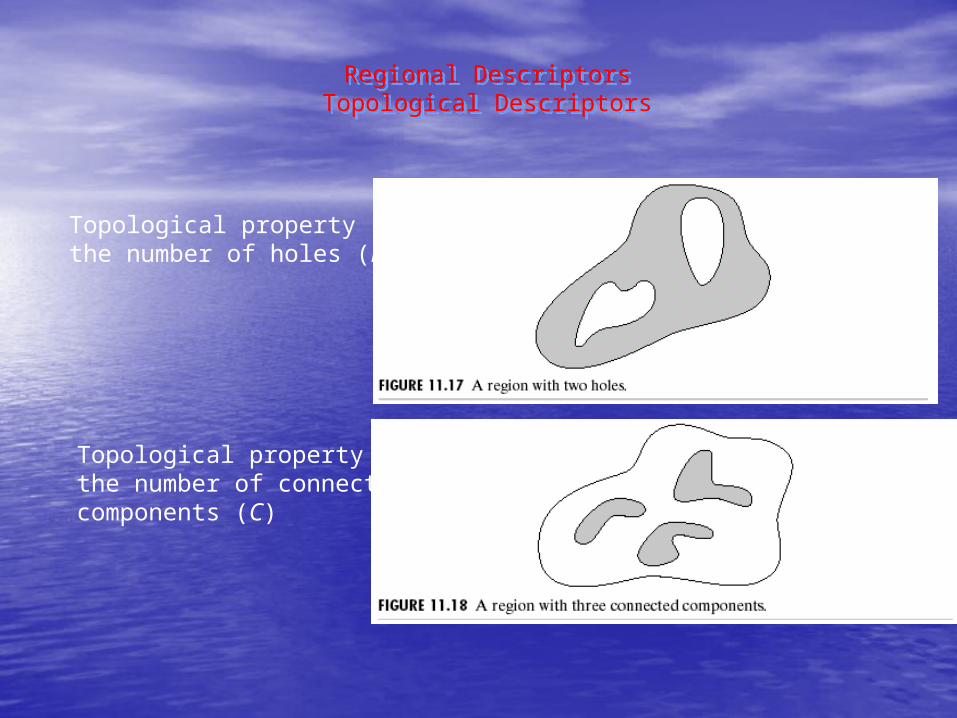
Topological property 1:the number of holes (H)
Topological property 2:the number of connected components (C)
Regional DescriptorsTopological DescriptorsRegional Descriptors
Topological Descriptors
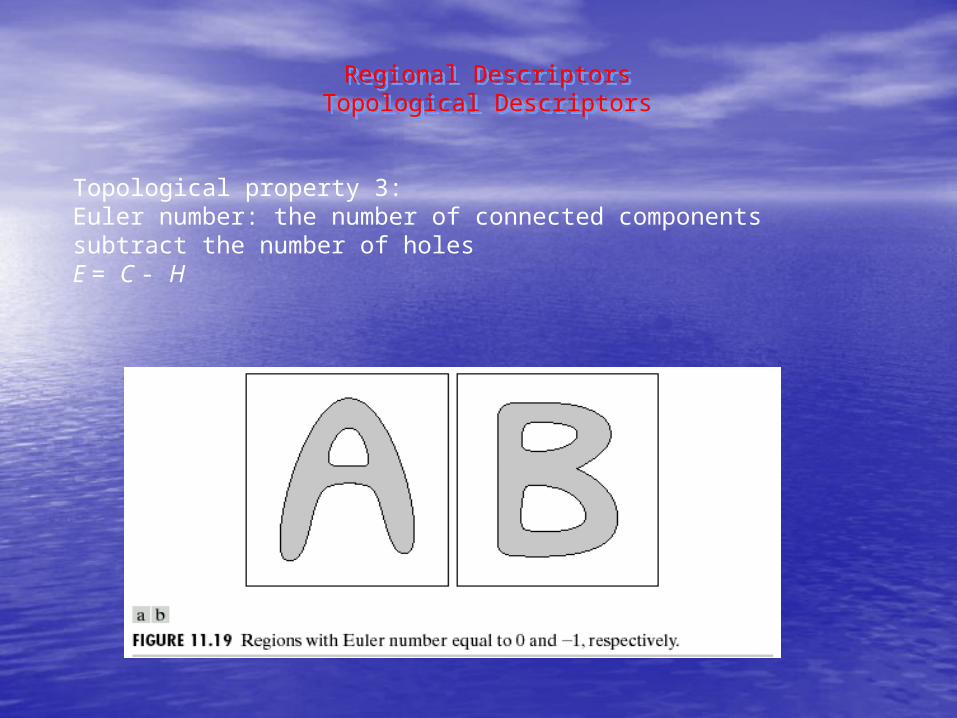
Topological property 3:Euler number: the number of connected components subtract the number of holes E = C - H
E=0 E= -1
Regional DescriptorsTopological DescriptorsRegional Descriptors
Topological Descriptors
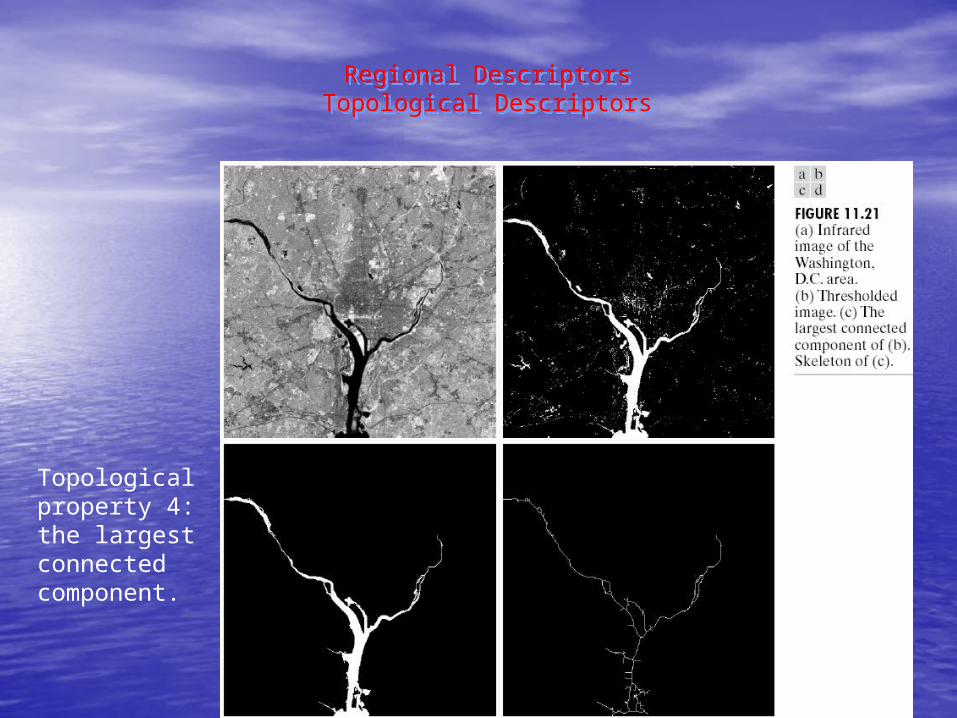
Topological property 4:the largest connected component.
Regional DescriptorsTexture
Regional DescriptorsTexture
Regional DescriptorsTexture
Regional DescriptorsTexture
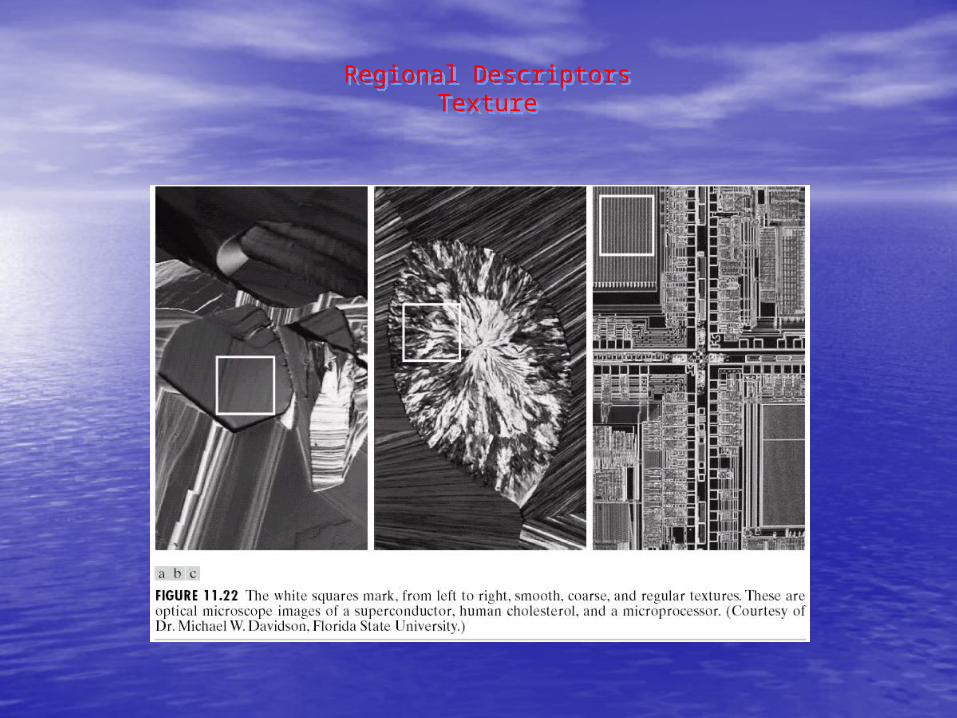
• Texture is usually defined as the smoothness or roughness of a surface.
• In computer vision, it is the visual appearance of the uniformity or lack of uniformity of brightness and color.
• There are two types of texture: random and regular. – Random texture cannot be exactly described
by words or equations; it must be described statistically. The surface of a pile of dirt or rocks of many sizes would be random.
– Regular texture can be described by words or equations or repeating pattern primitives. Clothes are frequently made with regularly repeating patterns.
– Random texture is analyzed by statistical methods.
– Regular texture is analyzed by structural or spectral (Fourier) methods.
Regional DescriptorsStatistical ApproachesRegional Descriptors
Statistical Approaches
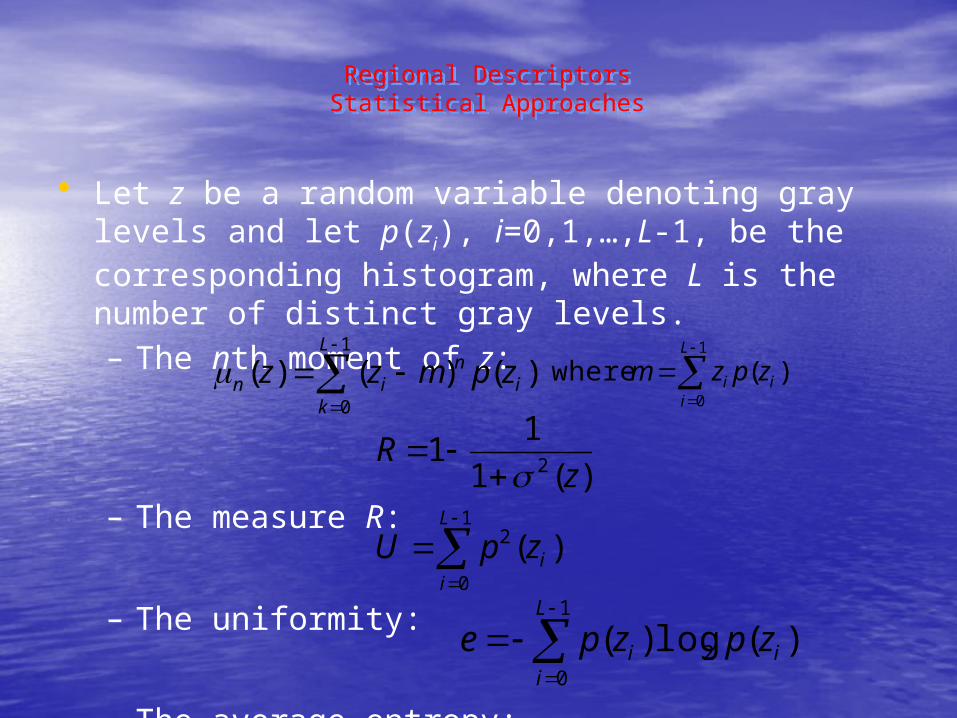
• Let z be a random variable denoting gray levels and let p(zi), i=0,1,…,L-1, be the corresponding histogram, where L is the number of distinct gray levels.– The nth moment of z:
– The measure R:
– The uniformity:
– The average entropy:
1
0
)( whereL
iii zpzm
)(log)( 2
1
0i
L
ii zpzpe
)(1
11
2 zR
1
0
2 )(L
iizpU
1
0
)()()(L
ki
nin zpmzz
Regional DescriptorsStatistical ApproachesRegional Descriptors
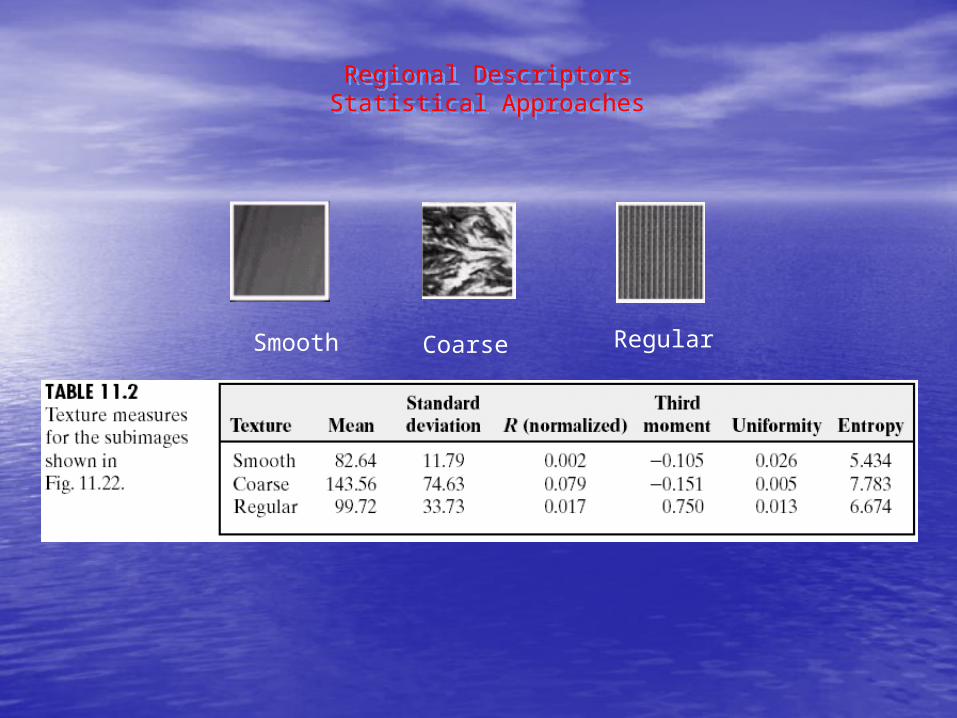
Statistical Approaches
Smooth Coarse Regular
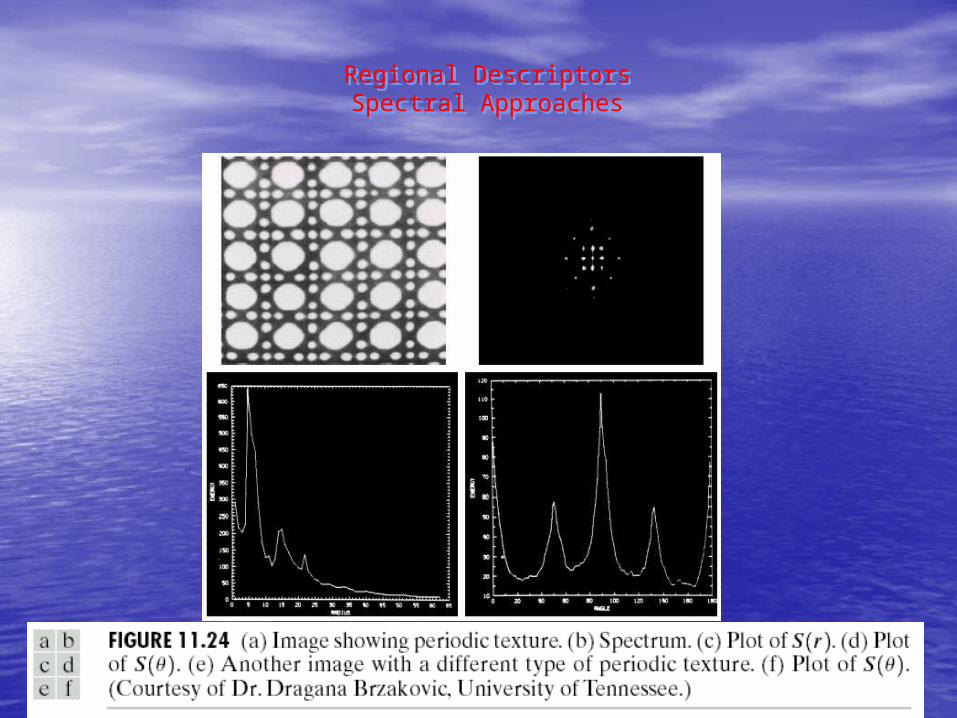
Regional DescriptorsSpectral ApproachesRegional DescriptorsSpectral Approaches

Regional DescriptorsSpectral ApproachesRegional DescriptorsSpectral Approaches
Regional DescriptorsMoments of Two-Dimensional Functions
Regional DescriptorsMoments of Two-Dimensional Functions
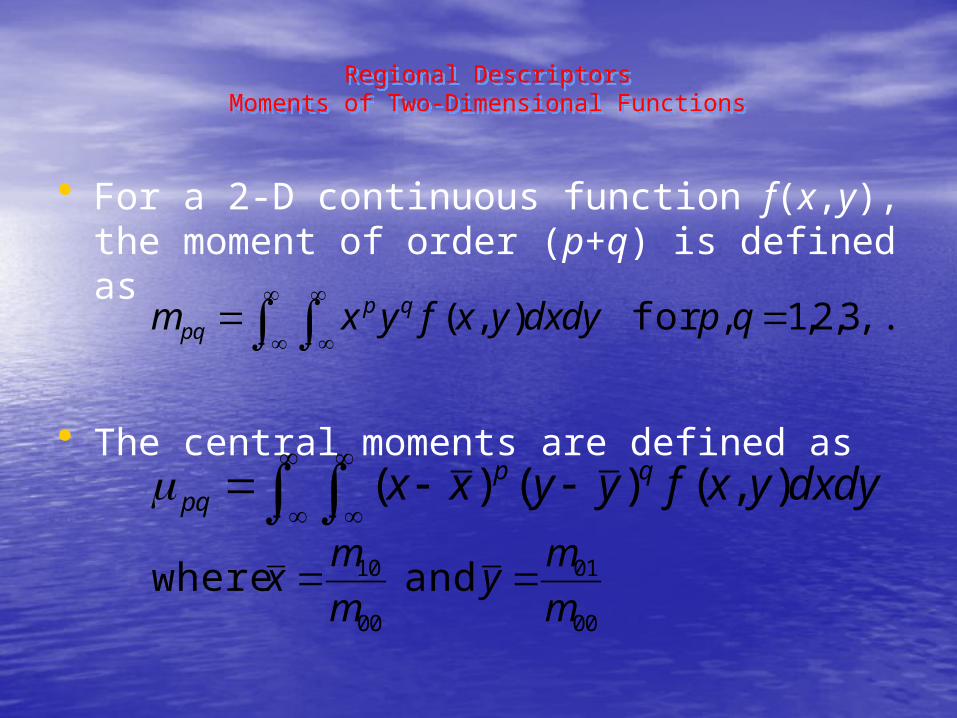
• For a 2-D continuous function f(x,y), the moment of order (p+q) is defined as
• The central moments are defined as
,...3,2,1,for ),(
qpdxdyyxfyxm qp
pq
dxdyyxfyyxx qp
pq ),()()(
00
01
00
10 and wherem
my
m
mx
Regional DescriptorsMoments of Two-Dimensional Functions
Regional DescriptorsMoments of Two-Dimensional Functions
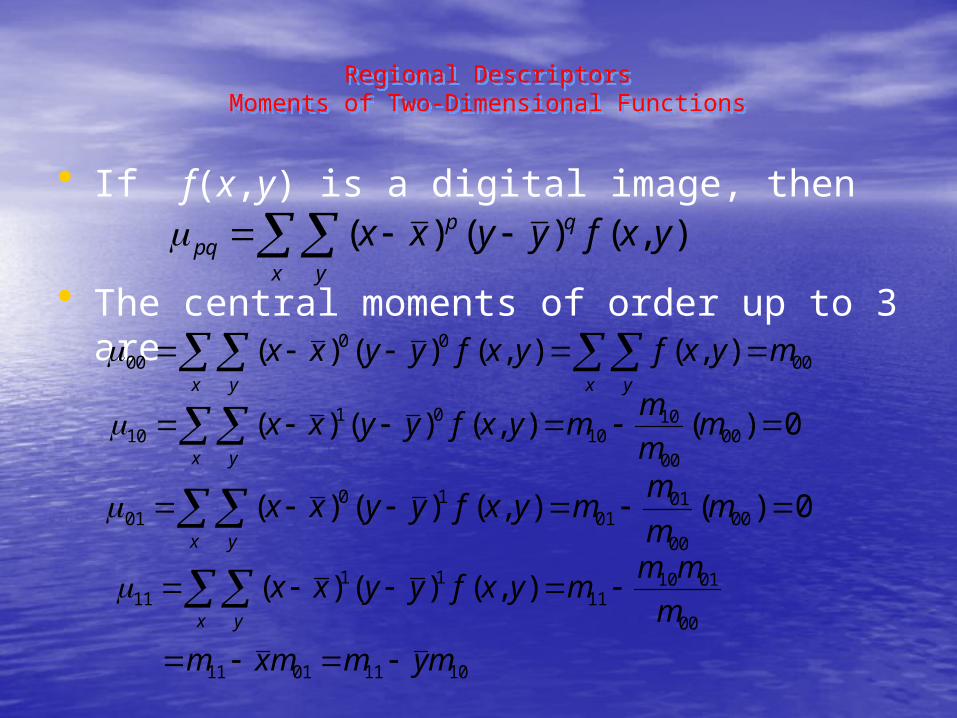
• If f(x,y) is a digital image, then
• The central moments of order up to 3 are
x y
qppq yxfyyxx ),()()(
0000
00 ),(),()()( myxfyxfyyxxx yx y
0)(),()()( 0000
1010
0110 m
m
mmyxfyyxx
x y
0)(),()()( 0000
0101
1001 m
m
mmyxfyyxx
x y
10110111
00
011011
1111
),()()(
mymmxm
m
mmmyxfyyxx
x y
Regional DescriptorsMoments of Two-Dimensional Functions
Regional DescriptorsMoments of Two-Dimensional Functions
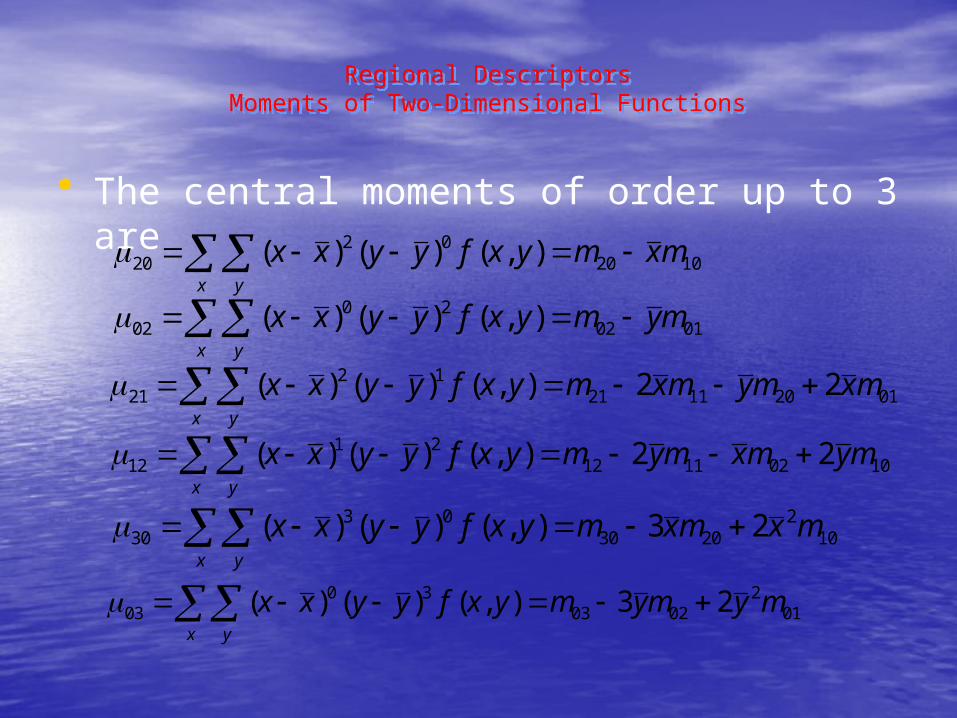
• The central moments of order up to 3 are
102002
20 ),()()( mxmyxfyyxxx y
010220
02 ),()()( mymyxfyyxxx y
0120112112
21 22),()()( mxmymxmyxfyyxxx y
1002111221
12 22),()()( mymxmymyxfyyxxx y
102
203003
30 23),()()( mxmxmyxfyyxxx y
012
020330
03 23),()()( mymymyxfyyxxx y
Regional DescriptorsMoments of Two-Dimensional Functions
Regional DescriptorsMoments of Two-Dimensional Functions
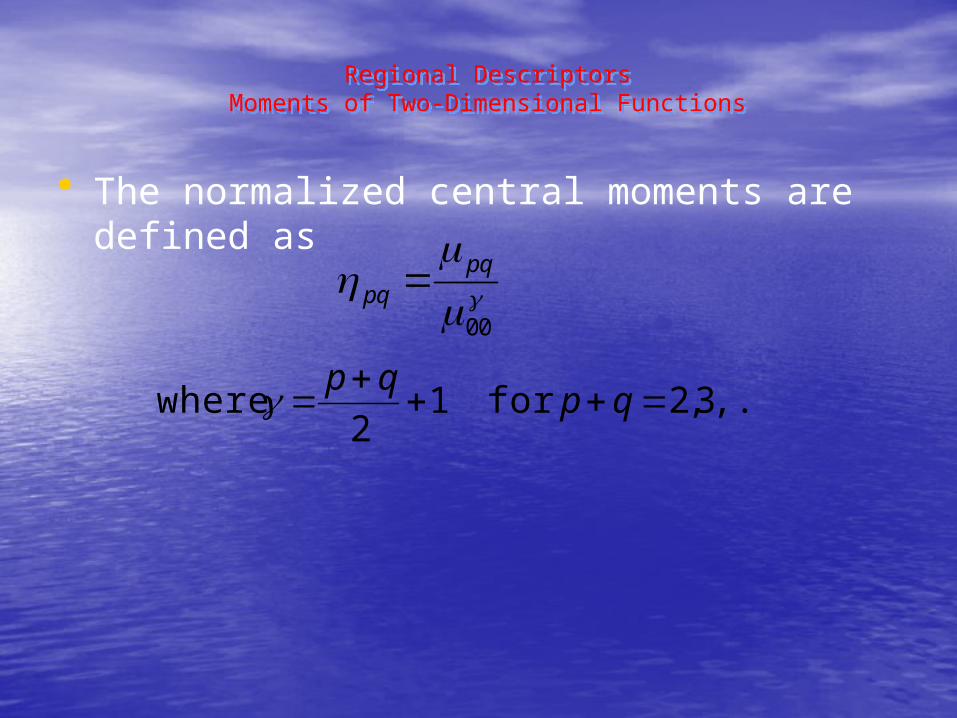
• The normalized central moments are defined as
00
pqpq
,....3,2for 12
where
qpqp
Regional DescriptorsMoments of Two-Dimensional Functions
Regional DescriptorsMoments of Two-Dimensional Functions
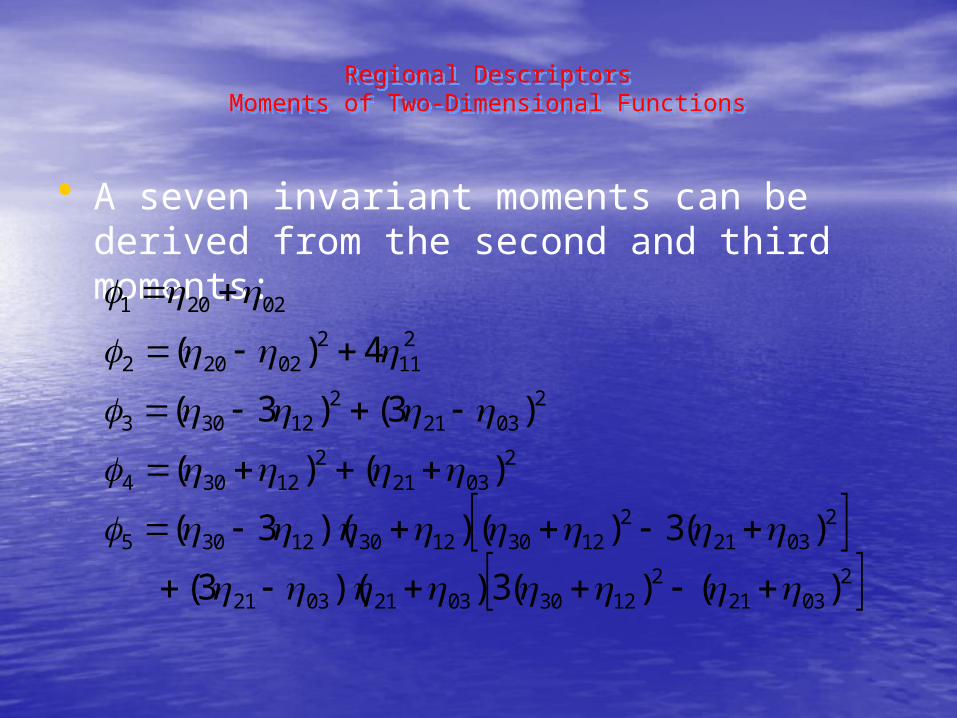
• A seven invariant moments can be derived from the second and third moments:
2
03212
123003210321
20321
21230123012305
20321
212304
20321
212303
211
202202
02201
)()(3))(3(
)(3)())(3(
)()(
)3()3(
4)(
Regional DescriptorsMoments of Two-Dimensional Functions
Regional DescriptorsMoments of Two-Dimensional Functions
•
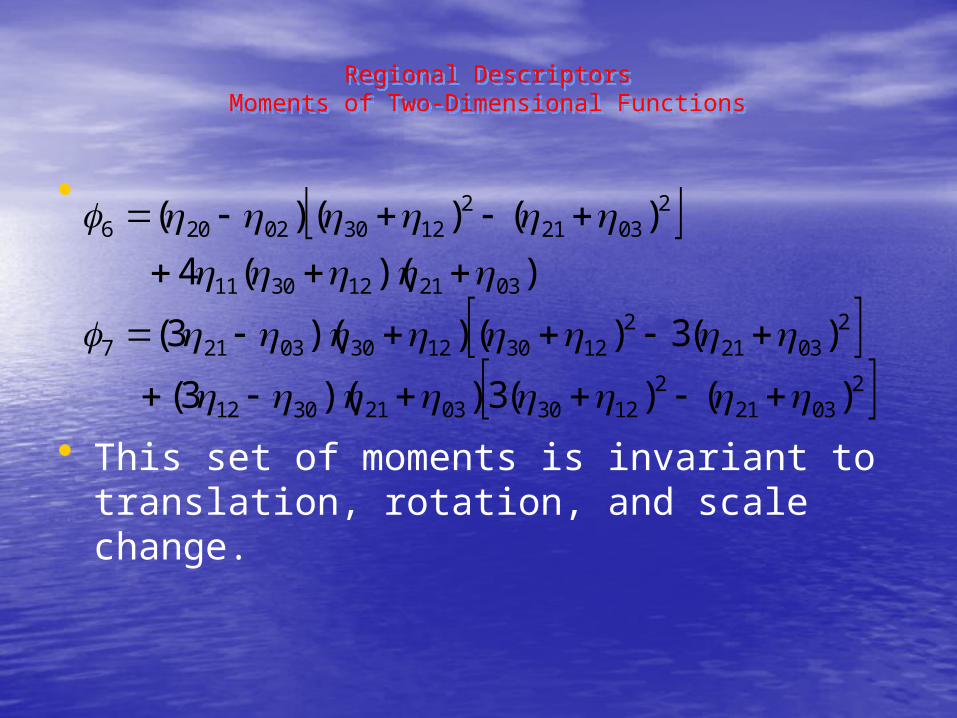
• This set of moments is invariant to translation, rotation, and scale change.
2
03212
123003213012
20321
21230123003217
0321123011
20321
2123002206
)()(3))(3(
)(3)())(3(
))((4
)()()(
Regional DescriptorsMoments of Two-Dimensional Functions
Regional DescriptorsMoments of Two-Dimensional Functions
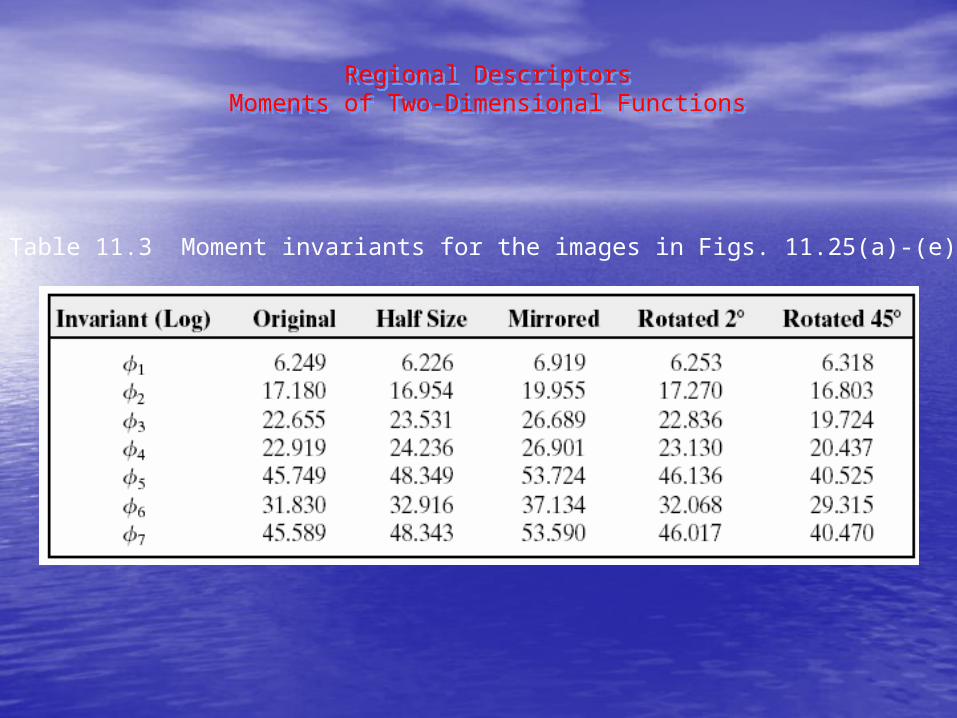
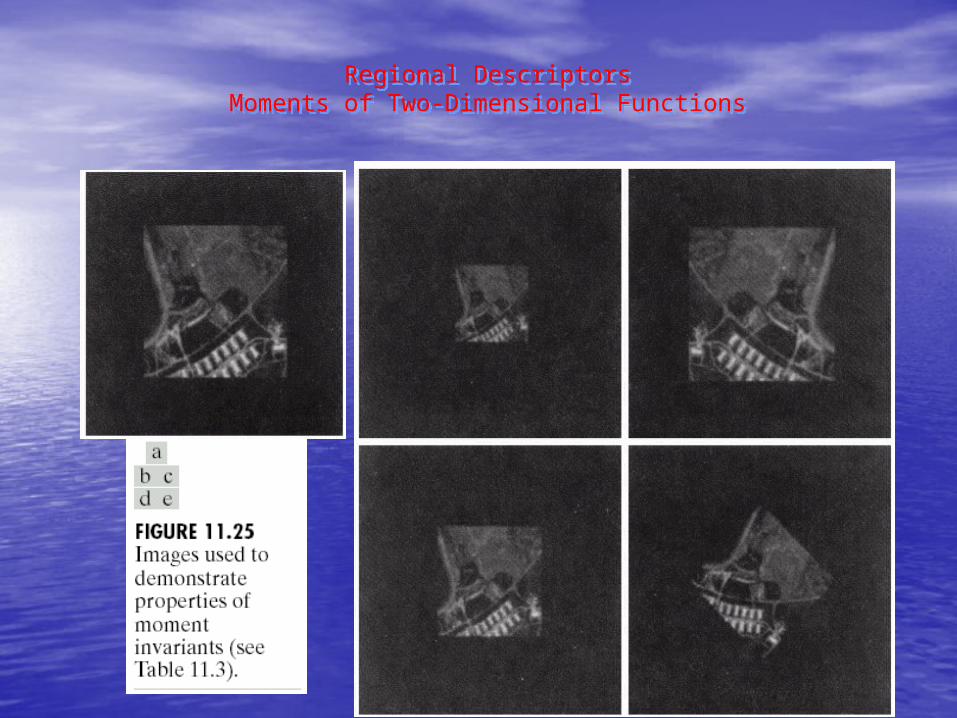
Table 11.3 Moment invariants for the images in Figs. 11.25(a)-(e).
Regional DescriptorsMoments of Two-Dimensional Functions
Regional DescriptorsMoments of Two-Dimensional Functions



The End





























