Embed Size (px)
Citation preview

Introduction toArmControl
Programming

Help

A General Programming Outlinea) Start at a home position.
b) Move the robot to a point directly above an object.
c) Move the robot to the object
d) Close the gripper.
e) Lift the object straight up.
f) Move the object to another point above the drop off position.
g) Set the object down where you want it.
h) Open the gripper.
i) Return to a point above the object.
j) Return home.

Check Setup
Step 1. Plug in the robots USB
Step 2. Turn on the robots power
Step 3. Start ArmControl
Step 4. Ensure communication is established
Step 5. Check arm style
Step 6. Check calibration if necessary
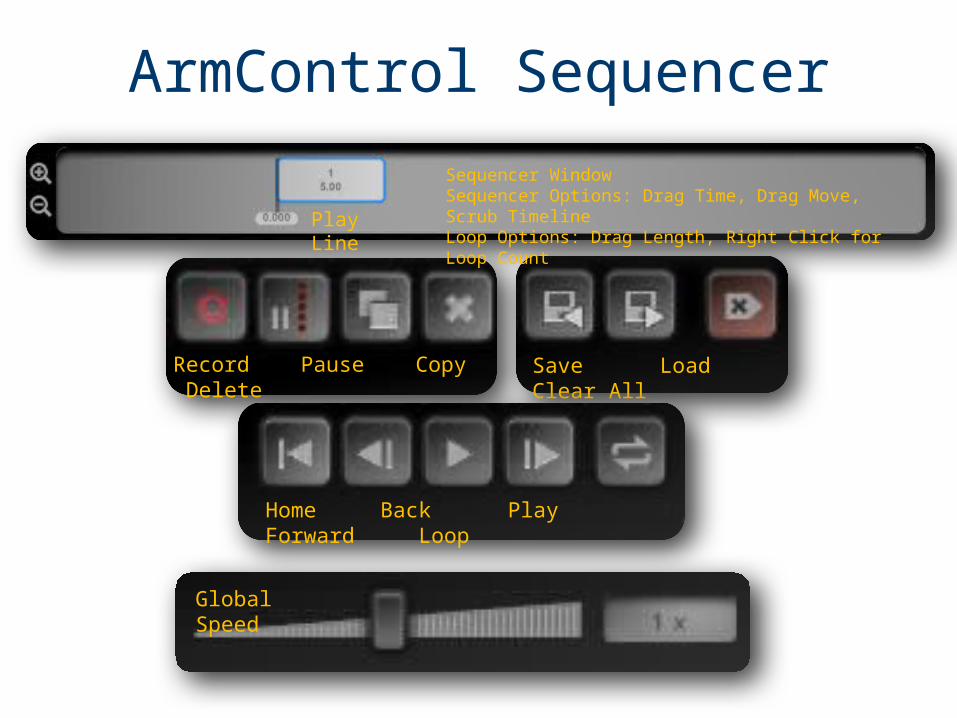
ArmControl Sequencer
Record Pause Copy Delete Save Load Clear All
Home Back Play Forward Loop
Global Speed
Play Line
Sequencer WindowSequencer Options: Drag Time, Drag Move, Scrub TimelineLoop Options: Drag Length, Right Click for Loop Count

ArmControl Sequencer
Save
Step 1 - Save the current sequence before recording any steps
Step 2 – Add a copied step
Step 3 – Move the robot to the next position
Step 4 – Record the current position
Copy
Record

ArmControl Sequencer
Step 5 – Adjust time duration for each step
Step 6 – Rewind the sequence to the beginning
Step 7 – Play the sequence one step at a time to ensure position accuracy
Home
Forward
WARNING! If the step duration is faster than the real robot can move from step to step it may skip or miss desired positions.

ArmControl Sequencer
Step 8 – Make any step corrections necessary
Step 9 – Play the entire sequence
Step 10 – Save the current sequence
Play
Save

Inputs
Inputs A-D can be used to control various starts and stops to a saved sequence
A B C D

Inputs
Input A – Digital start sequence from beginning
Input B – Return from digital pause
Input C – Return from digital pause
Input D – Stop sequence in progress
A B C D

B and C – Return from Pause
Inputs B and C can be used to return motion to a sequence when a digital pause is recorded onto a step
To add a digital pause to a step, select the step to be paused and select Pause. A pause line will then be added to the sequence timeline
B C
Pause

Inputs A & D
Input A – A signal from input A will start a sequence from the beginning or stop a sequence in progress rewind to home and restart the sequence
Input D – A signal from input D will stop a sequence. Can be used as an emergency stop
A D

Stopped at Beginning
Stopped in Middle
Stopped at End
At Digital Pause In Motion
Starts from Beginning
Returns & Starts from Beginning
Returns & Starts from Beginning
Returns & Starts from Beginning
Stops & Restarts from Beginning
Starts from Beginning
Restarts from Current Time Nothing Resumes from
Current Pause Nothing
Starts from Beginning
Restarts from Current Time Nothing Resumes from
Current Pause Nothing
Nothing Nothing Nothing Nothing Stops at Current Time
Inputs
A
B
C
D















![Cel — Modeling Everywhere › faculty › lanza › Downloads › Lemm2013a.pdf · TouchDevelop [13], instead, introduces a simplified scripting language for programming directly](https://img.pdfslide.net/doc/110x75/5f2015e7b6be2d56111db4a7/cel-a-modeling-everywhere-a-faculty-a-lanza-a-downloads-a-touchdevelop.jpg)












