Embed Size (px)
Citation preview
Introduction to
Automated Task
PlanningJonas Kvarnström
Automated Planning and Diagnosis Group
Artificial Intelligence and Integrated Computer Systems (AIICS) / IDA
3
jonk
v@ida
What is Planning?
Planning is thinking ahead
Not just reacting to what happens!
Thinking about possible actions and their effects,
formulating a complete plan that describes what to do and when,
in order to achieve a goal
…so when do we want computers to do that?
4
jonk
v@ida
Shakey
� Classical example: Shakey� Used the STRIPS planner
▪ Stanford Research InstituteProblem Solver
▪ One of the first planners (1969)
5
jonk
v@ida
Miconic 10 Elevators
� Schindler Miconic 10 elevators� People enter their destination
before they board an elevator
� Many elevators, many floors
� The goal: For everyone to be at their destination
� The plan tells us:Which elevators should go to whichfloors, in which order?
� The gain: Less time to wait for an elevator!
6
jonk
v@ida
Sheet Metal Bending
� Robots bending sheet metal� Goal: Bend a flat sheet to a specific shape
� Constraints: The piece must not collide with anything when moved!(Geometric reasoning required)
� Optimized operation saves a lot of time = money!
7
jonk
v@ida
NASA Earth Observing-1 Mission
� Earth Observing-1 Mission � Satellite in low earth orbit
▪ Can only communicate 8 x 10 minutes/day
▪ Operates for long periods without supervision
� CASPER software:Continuous Activity Scheduling, Planning, Execution and Replanning
� Dramatically increases science returns
▪ Interesting events are analyzed(volcanic eruptions, …)
▪ Targets to view are planneddepending on previous observations
▪ Plans downlink activities:Limited bandwidth
� http://ase.jpl.nasa.gov/
8
jonk
v@ida
Unmanned Aerial Vehicles
� Unmanned aerial vehicles� Multiple agents to coordinate
� Actions executed concurrently

9
jonk
v@ida
UAV 1: Photogrammetry
� Photograph buildings, to generate 3D models
10
jonk
v@ida
UAV 2: Traffic Monitoring
� Monitor traffic / find possible routes for emergency vehicles
11
jonk
v@ida
UAV 3: Finding Forest Fires
� Patrol large areas searching for forest fires, day after day after day…
12
jonk
v@ida
UAV 4: Emergency Services Logistics
� Assist in emergency situations
▪ Deliver packages of food, medicine, water
13
jonk
v@ida
Why Planning?
� Can’t we just solve these problems ourselves?
� Manual planning can be boring and inefficient
▪ Who wants to spend all day guiding elevators?
� Automated planning may create higher quality plans
▪ Software can systematically optimize, can investigate millions of alternatives
� Automated planning can be applied where the agent is
▪ Satellites cannot always communicate with ground operators
▪ Spacecraft or robots on other planets may be hours away by radio
Domain-Specific vs.
Domain-Independent Planning
15
jonk
v@ida
Introduction
� Let’s say we are interested in the photogrammetry domain� Multiple UAVs available
� Goal: To take pictures of buildings
� How do you create a photogrammetry plan?
16
jonk
v@ida
Domain-Specific Planning
� Domain-specific planner: Created for a particular domain� Input: A map containing buildings
▪ Everything else is implicit,since the planner already knowswhat actions are available, etc (hardcoded!)
� Implementation:
▪ Calculate suitable UAV positions
▪ Call a Travelling Salesman Problem solver
▪ Generate flight commands
PG Problem PG-specificPlanner
PG Plan
Sounds simple, and can be very efficient! But…
17
jonk
v@ida
Domain-Specific Planning
� Specialization means less flexibility! What if…� you want to deliver a couple of crates at the same time?
▪ Generalize input…
� you have to consider refueling?
▪ Different algorithm!
� you have two UAVs and a UGV (ground vehicle)?
▪ Differentalgorithm!
� you want to survey an area (send a video feed of the ground)?
� you have dynamic no-fly-zones (”don’t fly there at 15:00-16:00”)?
PG +DeliveryPlanner
PGPlannerw/ fuel
Multi-TSP
planner
18
jonk
v@ida
Domain-Independent Planning
� We want a generic planning system!� Capable of taking a high-level description of any problem domain
and then solving problems within the domain!
� A single planner
▪ Improvements to the planner � all domains benefit
� High-level domain and problem definitions
▪ Easier to specify these than to write specialized algorithms
▪ Easier to change than a hard-coded optimized implementation
▪ Also useful for rapid prototyping
Satellite
DomainGeneralPlanner
Satellite
problem instance
PlanUAV
DomainGeneralPlanner
Photogrammetry
problem instance
Plan
19
jonk
v@ida
What is Common?
What is common to all of these problems?
20
jonk
v@ida
This is Common!
� The world contains various types of objects� Buildings, cards, aircraft, switches, people, …
� We are generally interested in properties of these objects� Location of a card, whether we have a picture of a building or not, …
� Goals can be described as desired properties� We should have a picture of each building
� Actions modify properties (simplified!)� takeoff(uav) � now the UAV is in the air
� photograph(uav, building) � now we have a picture of the building
� Can only be executed if we can see the building
21
jonk
v@ida
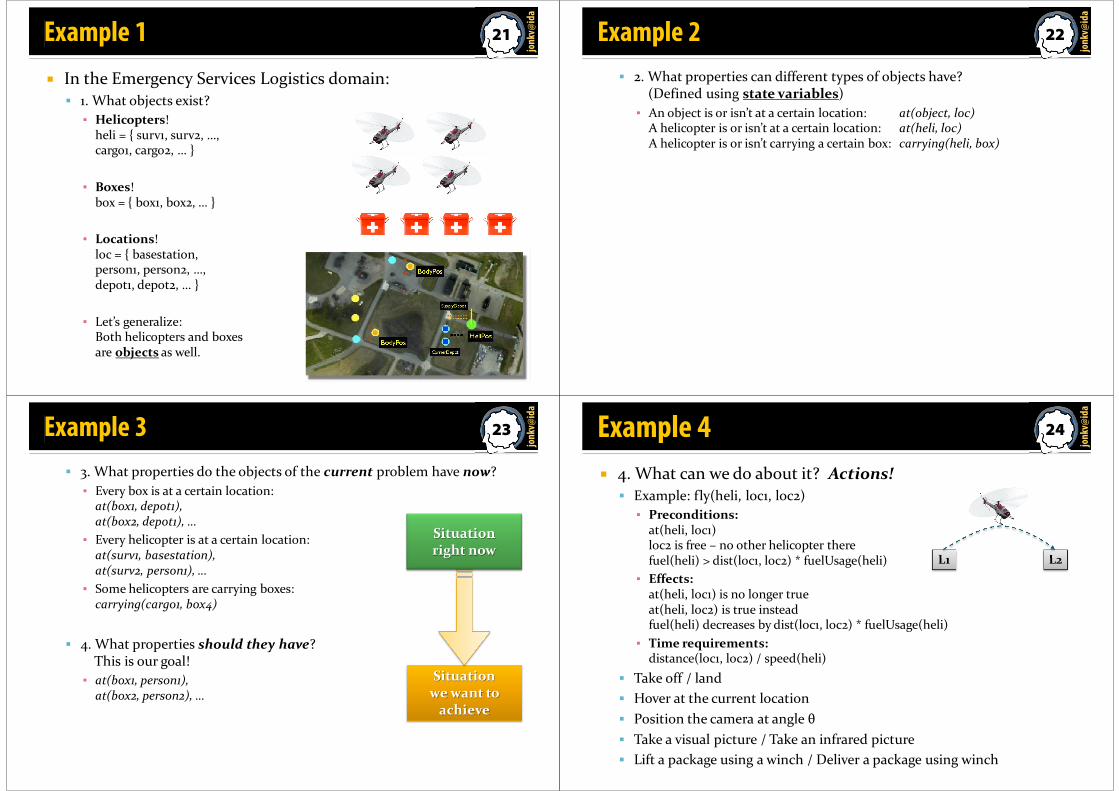
Example 1
� In the Emergency Services Logistics domain:� 1. What objects exist?
▪ Helicopters! heli = { surv1, surv2, …, cargo1, cargo2, … }
▪ Boxes!box = { box1, box2, … }
▪ Locations!loc = { basestation, person1, person2, …,depot1, depot2, … }
▪ Let’s generalize:Both helicopters and boxesare objects as well.
22
jonk
v@ida
Example 2
� 2. What properties can different types of objects have?(Defined using state variables)
▪ An object is or isn’t at a certain location: at(object, loc)A helicopter is or isn’t at a certain location: at(heli, loc)A helicopter is or isn’t carrying a certain box: carrying(heli, box)
23
jonk
v@ida
Example 3
� 3. What properties do the objects of the current problem have now?
▪ Every box is at a certain location:at(box1, depot1), at(box2, depot1), …
▪ Every helicopter is at a certain location:at(surv1, basestation), at(surv2, person1), …
▪ Some helicopters are carrying boxes:carrying(cargo1, box4)
� 4. What properties should they have?This is our goal!
▪ at(box1, person1), at(box2, person2), …
Situationwe want to
achieve
Situationright now
24
jonk
v@ida
Example 4
� 4. What can we do about it? Actions!� Example: fly(heli, loc1, loc2)
▪ Preconditions:at(heli, loc1)loc2 is free – no other helicopter therefuel(heli) > dist(loc1, loc2) * fuelUsage(heli)
▪ Effects:at(heli, loc1) is no longer trueat(heli, loc2) is true insteadfuel(heli) decreases by dist(loc1, loc2) * fuelUsage(heli)
▪ Time requirements:distance(loc1, loc2) / speed(heli)
� Take off / land
� Hover at the current location
� Position the camera at angle θ
� Take a visual picture / Take an infrared picture
� Lift a package using a winch / Deliver a package using winch
L1 L2
25
jonk
v@ida
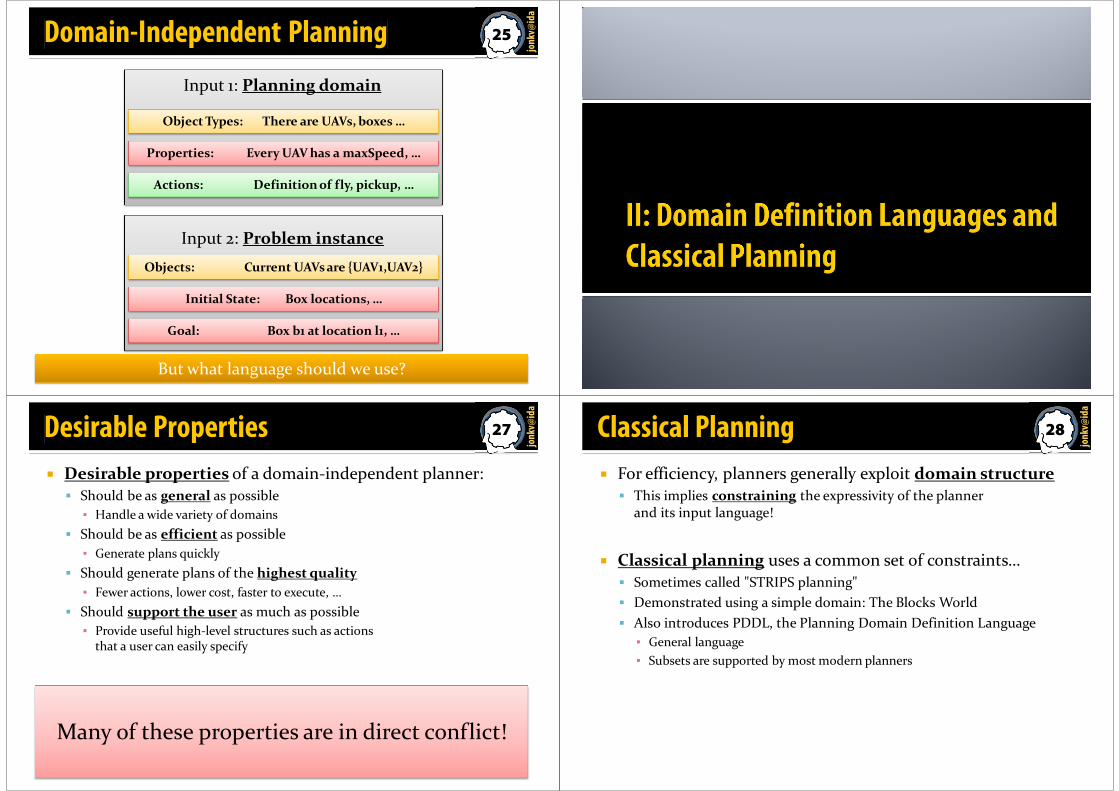
Domain-Independent Planning
Input 1: Planning domain
Input 2: Problem instance
Object Types: There are UAVs, boxes …
Properties: Every UAV has a maxSpeed, …
Actions: Definition of fly, pickup, …
Objects: Current UAVs are {UAV1,UAV2}
Initial State: Box locations, …
Goal: Box b1 at location l1, …
But what language should we use?
27
jonk
v@ida
Desirable Properties
� Desirable properties of a domain-independent planner:� Should be as general as possible
▪ Handle a wide variety of domains
� Should be as efficient as possible
▪ Generate plans quickly
� Should generate plans of the highest quality
▪ Fewer actions, lower cost, faster to execute, …
� Should support the user as much as possible
▪ Provide useful high-level structures such as actionsthat a user can easily specify
Many of these properties are in direct conflict!
28
jonk
v@ida
Classical Planning
� For efficiency, planners generally exploit domain structure� This implies constraining the expressivity of the planner
and its input language!
� Classical planning uses a common set of constraints…� Sometimes called "STRIPS planning"
� Demonstrated using a simple domain: The Blocks World
� Also introduces PDDL, the Planning Domain Definition Language
▪ General language
▪ Subsets are supported by most modern planners
29
jonk
v@ida
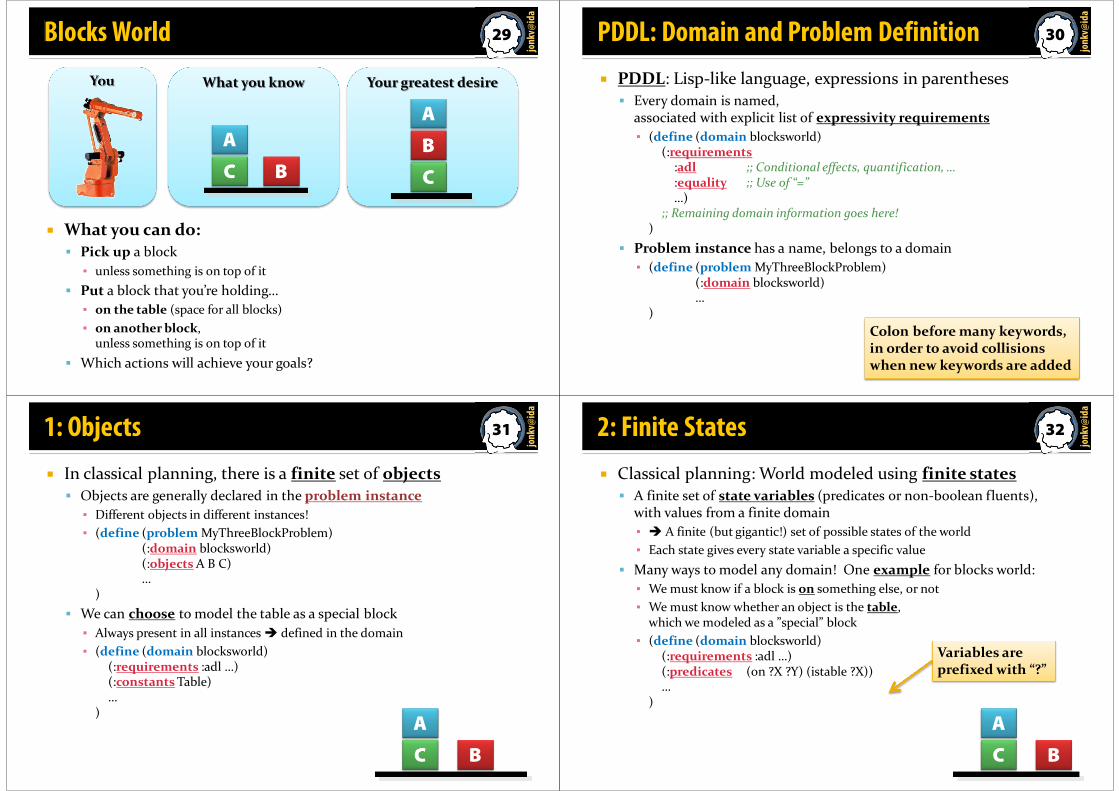
Blocks World
� What you can do:� Pick up a block
▪ unless something is on top of it
� Put a block that you’re holding…
▪ on the table (space for all blocks)
▪ on another block,unless something is on top of it
� Which actions will achieve your goals?
Your greatest desireWhat you knowYou
C B
A
C
B
A
30
jonk
v@ida
PDDL: Domain and Problem Definition
� PDDL: Lisp-like language, expressions in parentheses� Every domain is named,
associated with explicit list of expressivity requirements
▪ (define (domain blocksworld)(:requirements
:adl ;; Conditional effects, quantification, …:equality ;; Use of “=”…)
;; Remaining domain information goes here!)
� Problem instance has a name, belongs to a domain
▪ (define (problem MyThreeBlockProblem)(:domain blocksworld)…
)
Colon before many keywords,in order to avoid collisionswhen new keywords are added
31
jonk
v@ida
1: Objects
� In classical planning, there is a finite set of objects� Objects are generally declared in the problem instance
▪ Different objects in different instances!
▪ (define (problem MyThreeBlockProblem)(:domain blocksworld)(:objects A B C)…
)
� We can choose to model the table as a special block
▪ Always present in all instances � defined in the domain
▪ (define (domain blocksworld)(:requirements :adl …)(:constants Table)…
)
C B
A
32
jonk
v@ida
2: Finite States
� Classical planning: World modeled using finite states� A finite set of state variables (predicates or non-boolean fluents),
with values from a finite domain
▪ � A finite (but gigantic!) set of possible states of the world
▪ Each state gives every state variable a specific value
� Many ways to model any domain! One example for blocks world:
▪ We must know if a block is on something else, or not
▪ We must know whether an object is the table,which we modeled as a ”special” block
▪ (define (domain blocksworld)(:requirements :adl …)(:predicates (on ?X ?Y) (istable ?X))…
)
C B
A
Variables are prefixed with “?”
33
jonk
v@ida
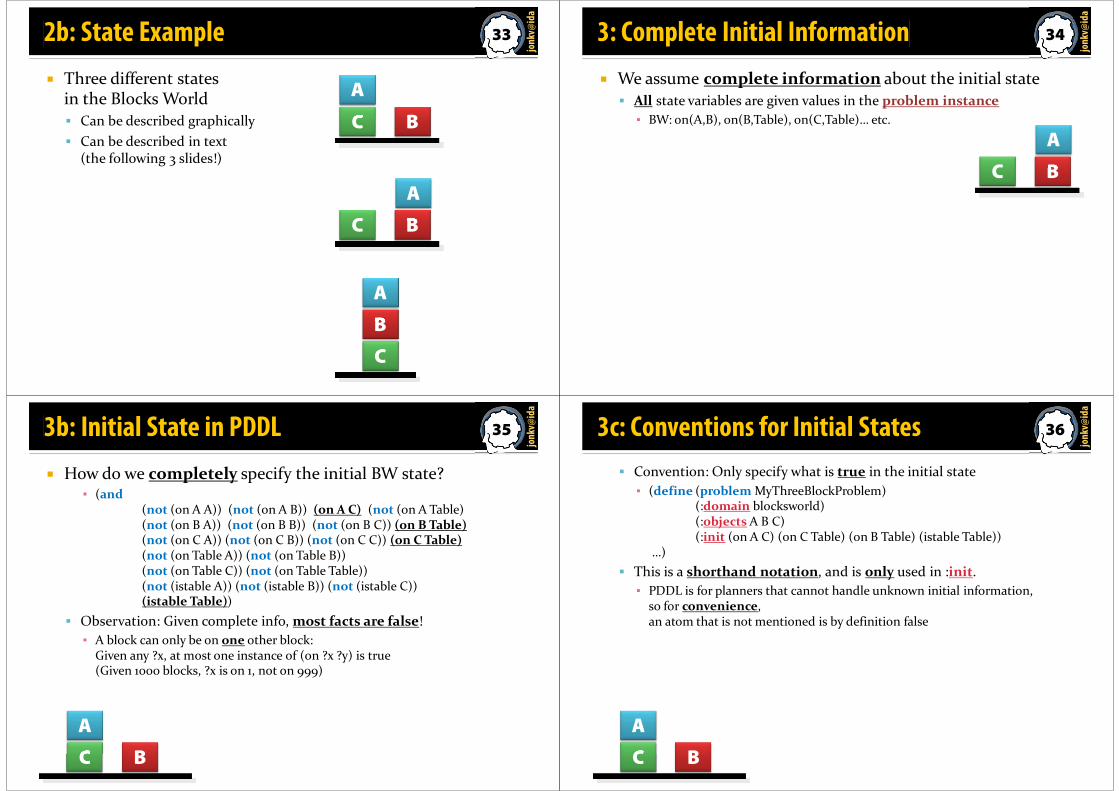
2b: State Example
� Three different statesin the Blocks World� Can be described graphically
� Can be described in text(the following 3 slides!)
C
B
A
C B
A
C B
A
34
jonk
v@ida
3: Complete Initial Information
� We assume complete information about the initial state� All state variables are given values in the problem instance
▪ BW: on(A,B), on(B,Table), on(C,Table)… etc.
C B
A
35
jonk
v@ida
3b: Initial State in PDDL
� How do we completely specify the initial BW state?▪ (and
(not (on A A)) (not (on A B)) (on A C) (not (on A Table)(not (on B A)) (not (on B B)) (not (on B C)) (on B Table)(not (on C A)) (not (on C B)) (not (on C C)) (on C Table)(not (on Table A)) (not (on Table B))(not (on Table C)) (not (on Table Table))(not (istable A)) (not (istable B)) (not (istable C))(istable Table))
� Observation: Given complete info, most facts are false!
▪ A block can only be on one other block:Given any ?x, at most one instance of (on ?x ?y) is true(Given 1000 blocks, ?x is on 1, not on 999)
C B
A
36
jonk
v@ida
3c: Conventions for Initial States
� Convention: Only specify what is true in the initial state
▪ (define (problem MyThreeBlockProblem)(:domain blocksworld)(:objects A B C)(:init (on A C) (on C Table) (on B Table) (istable Table))
…)
� This is a shorthand notation, and is only used in :init.
▪ PDDL is for planners that cannot handle unknown initial information,so for convenience,an atom that is not mentioned is by definition false
C B
A
37
jonk
v@ida
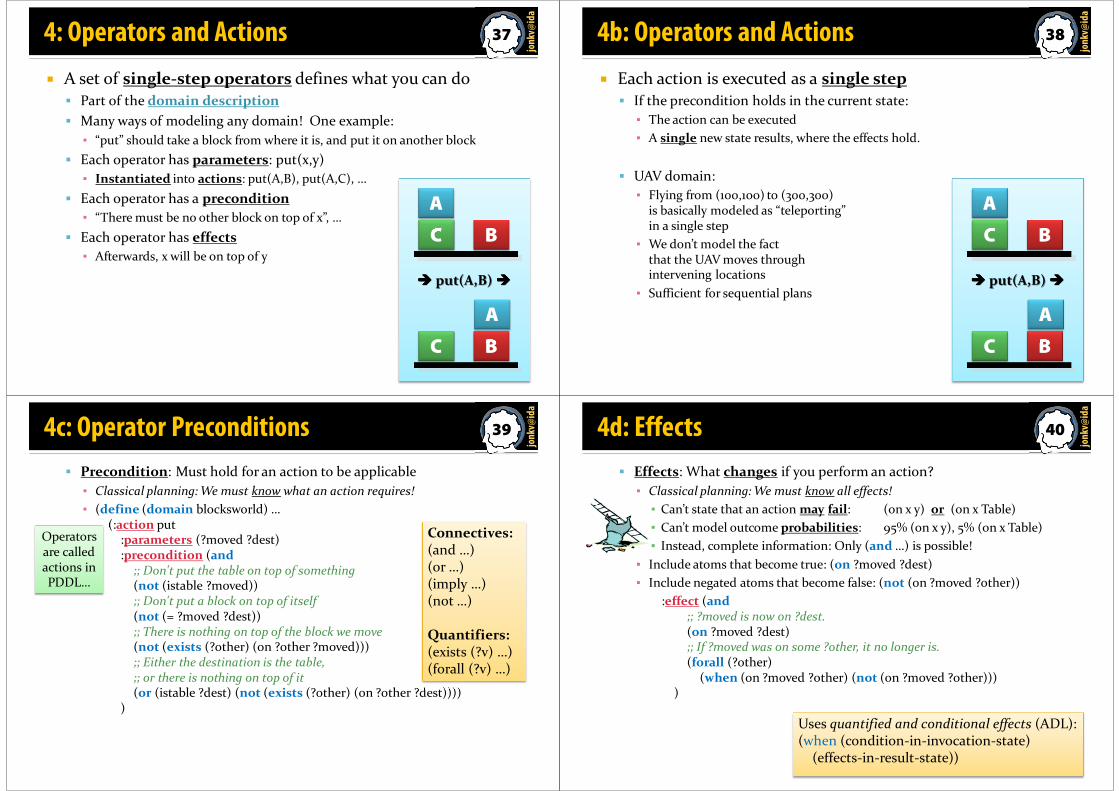
4: Operators and Actions
� A set of single-step operators defines what you can do� Part of the domain description
� Many ways of modeling any domain! One example:
▪ “put” should take a block from where it is, and put it on another block
� Each operator has parameters: put(x,y)
▪ Instantiated into actions: put(A,B), put(A,C), …
� Each operator has a precondition
▪ “There must be no other block on top of x”, …
� Each operator has effects
▪ Afterwards, x will be on top of y
���� put(A,B) ����
C B
A
C B
A
38
jonk
v@ida
4b: Operators and Actions
� Each action is executed as a single step� If the precondition holds in the current state:
▪ The action can be executed
▪ A single new state results, where the effects hold.
� UAV domain:
▪ Flying from (100,100) to (300,300)is basically modeled as “teleporting”in a single step
▪ We don’t model the factthat the UAV moves throughintervening locations
▪ Sufficient for sequential plans���� put(A,B) ����
C B
A
C B
A
39
jonk
v@ida
4c: Operator Preconditions
� Precondition: Must hold for an action to be applicable
▪ Classical planning: We must know what an action requires!
▪ (define (domain blocksworld) …(:action put
:parameters (?moved ?dest):precondition (and
;; Don't put the table on top of something(not (istable ?moved)) ;; Don't put a block on top of itself(not (= ?moved ?dest));; There is nothing on top of the block we move(not (exists (?other) (on ?other ?moved))) ;; Either the destination is the table,;; or there is nothing on top of it(or (istable ?dest) (not (exists (?other) (on ?other ?dest))))
)
Connectives:(and …)(or …)(imply …)(not …)
Quantifiers:(exists (?v) …)(forall (?v) …)
Operators are called actions in PDDL…
40
jonk
v@ida
4d: Effects
� Effects: What changes if you perform an action?
▪ Classical planning: We must know all effects!
▪ Can’t state that an action may fail: (on x y) or (on x Table)
▪ Can’t model outcome probabilities: 95% (on x y), 5% (on x Table)
▪ Instead, complete information: Only (and …) is possible!
▪ Include atoms that become true: (on ?moved ?dest)
▪ Include negated atoms that become false: (not (on ?moved ?other))
:effect (and;; ?moved is now on ?dest.(on ?moved ?dest);; If ?moved was on some ?other, it no longer is.(forall (?other)
(when (on ?moved ?other) (not (on ?moved ?other))))
Uses quantified and conditional effects (ADL):(when (condition-in-invocation-state)
(effects-in-result-state))
41
jonk
v@ida
5: No Other Agents
� Classical planning assumes the state of the world can only be modifiedby actions generated by the planner
▪ No agents are moving blocks aroundunless we say so in the plan!
▪ � When considering different potential plans,the planner can predict the exact end result of every action in the planwithout worrying about someone "disturbing" its execution
42
jonk
v@ida
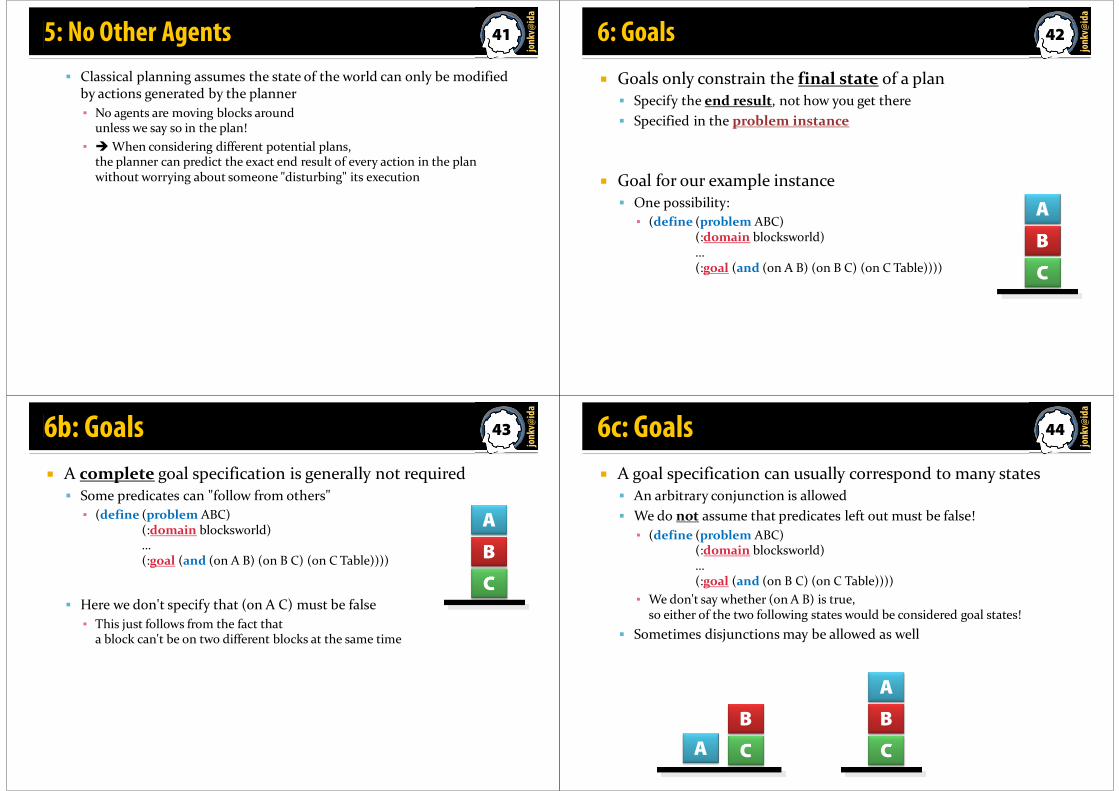
6: Goals
� Goals only constrain the final state of a plan� Specify the end result, not how you get there
� Specified in the problem instance
� Goal for our example instance� One possibility:
▪ (define (problem ABC)(:domain blocksworld)…(:goal (and (on A B) (on B C) (on C Table))))
C
B
A
43
jonk
v@ida
6b: Goals
� A complete goal specification is generally not required� Some predicates can "follow from others"
▪ (define (problem ABC)(:domain blocksworld)…(:goal (and (on A B) (on B C) (on C Table))))
� Here we don't specify that (on A C) must be false
▪ This just follows from the fact thata block can't be on two different blocks at the same time
C
B
A
44
jonk
v@ida
6c: Goals
� A goal specification can usually correspond to many states� An arbitrary conjunction is allowed
� We do not assume that predicates left out must be false!
▪ (define (problem ABC)(:domain blocksworld)…(:goal (and (on B C) (on C Table))))
▪ We don't say whether (on A B) is true,so either of the two following states would be considered goal states!
� Sometimes disjunctions may be allowed as well
C
B
A
C
B
A
Using Object TypesSame Expressivity, More Convenient
46
jonk
v@ida
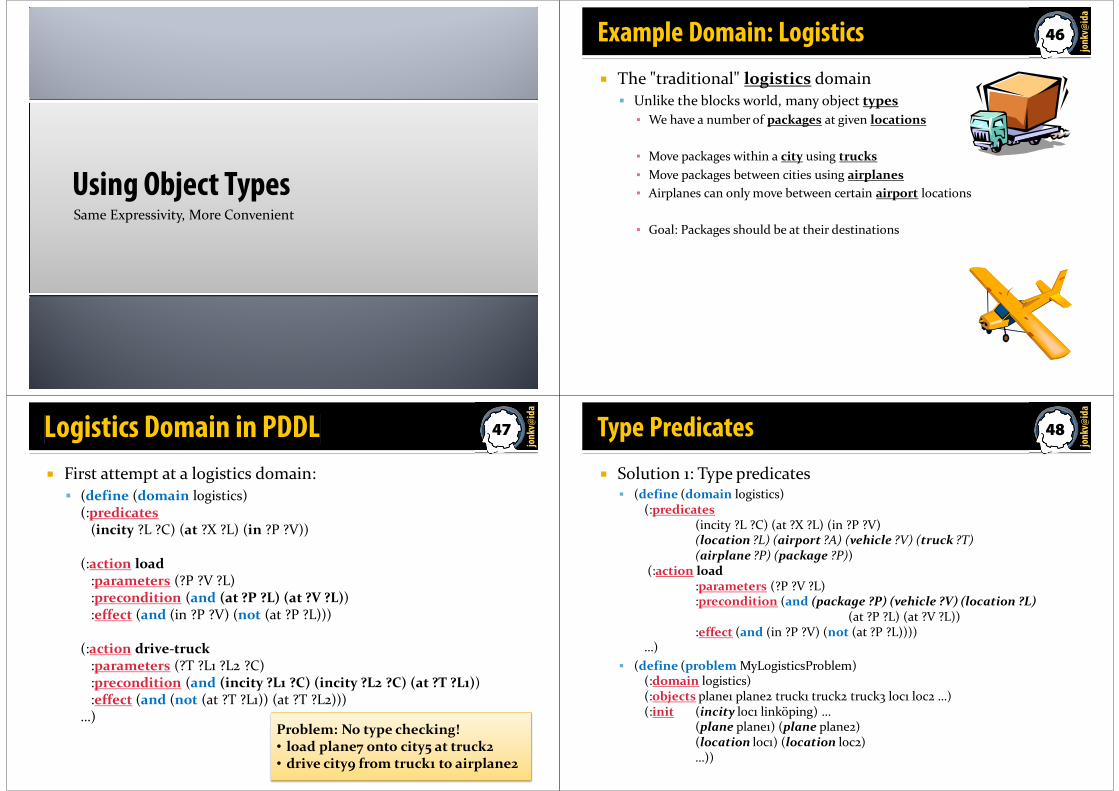
Example Domain: Logistics
� The "traditional" logistics domain� Unlike the blocks world, many object types
▪ We have a number of packages at given locations
▪ Move packages within a city using trucks
▪ Move packages between cities using airplanes
▪ Airplanes can only move between certain airport locations
▪ Goal: Packages should be at their destinations
47
jonk
v@ida
Logistics Domain in PDDL
� First attempt at a logistics domain:� (define (domain logistics)
(:predicates(incity ?L ?C) (at ?X ?L) (in ?P ?V))
(:action load:parameters (?P ?V ?L):precondition (and (at ?P ?L) (at ?V ?L)):effect (and (in ?P ?V) (not (at ?P ?L)))
(:action drive-truck:parameters (?T ?L1 ?L2 ?C):precondition (and (incity ?L1 ?C) (incity ?L2 ?C) (at ?T ?L1)):effect (and (not (at ?T ?L1)) (at ?T ?L2)))
…)Problem: No type checking!• load plane7 onto city5 at truck2• drive city9 from truck1 to airplane2
48
jonk
v@ida
Type Predicates
� Solution 1: Type predicates� (define (domain logistics)
(:predicates(incity ?L ?C) (at ?X ?L) (in ?P ?V)(location ?L) (airport ?A) (vehicle ?V) (truck ?T)(airplane ?P) (package ?P))
(:action load:parameters (?P ?V ?L):precondition (and (package ?P) (vehicle ?V) (location ?L)
(at ?P ?L) (at ?V ?L)):effect (and (in ?P ?V) (not (at ?P ?L))))
…)
� (define (problem MyLogisticsProblem)(:domain logistics)(:objects plane1 plane2 truck1 truck2 truck3 loc1 loc2 …)(:init (incity loc1 linköping) …
(plane plane1) (plane plane2)(location loc1) (location loc2)…))
49
jonk
v@ida
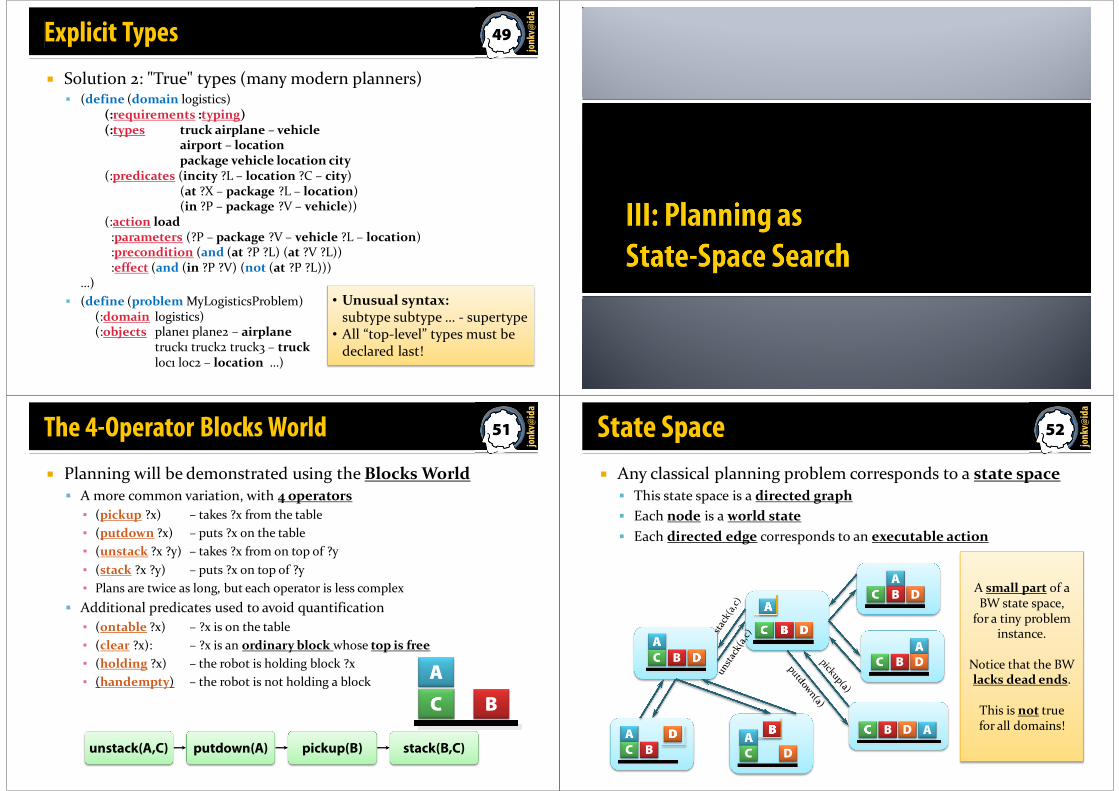
Explicit Types
� Solution 2: "True" types (many modern planners)� (define (domain logistics)
(:requirements :typing)(:types truck airplane – vehicle
airport – location package vehicle location city
(:predicates (incity ?L – location ?C – city)(at ?X – package ?L – location)(in ?P – package ?V – vehicle))
(:action load:parameters (?P – package ?V – vehicle ?L – location):precondition (and (at ?P ?L) (at ?V ?L)):effect (and (in ?P ?V) (not (at ?P ?L)))
…)
� (define (problem MyLogisticsProblem)(:domain logistics)(:objects plane1 plane2 – airplane
truck1 truck2 truck3 – truckloc1 loc2 – location …)
• Unusual syntax:subtype subtype … - supertype
• All “top-level” types must be declared last!
51
jonk
v@ida
The 4-Operator Blocks World
� Planning will be demonstrated using the Blocks World� A more common variation, with 4 operators
▪ (pickup ?x) – takes ?x from the table
▪ (putdown ?x) – puts ?x on the table
▪ (unstack ?x ?y) – takes ?x from on top of ?y
▪ (stack ?x ?y) – puts ?x on top of ?y
▪ Plans are twice as long, but each operator is less complex
� Additional predicates used to avoid quantification
▪ (ontable ?x) – ?x is on the table
▪ (clear ?x): – ?x is an ordinary block whose top is free
▪ (holding ?x) – the robot is holding block ?x
▪ (handempty) – the robot is not holding a block
pickup(B)putdown(A)unstack(A,C) stack(B,C)
C B
A
52
jonk
v@ida
State Space
� Any classical planning problem corresponds to a state space� This state space is a directed graph
� Each node is a world state
� Each directed edge corresponds to an executable action
A
BC D
A
BC
D AB
C D
A
BC D
A
BC D
A
BC D
ABC D
A small part of a BW state space,
for a tiny problem instance.
Notice that the BW lacks dead ends.
This is not truefor all domains!
53
jonk
v@ida
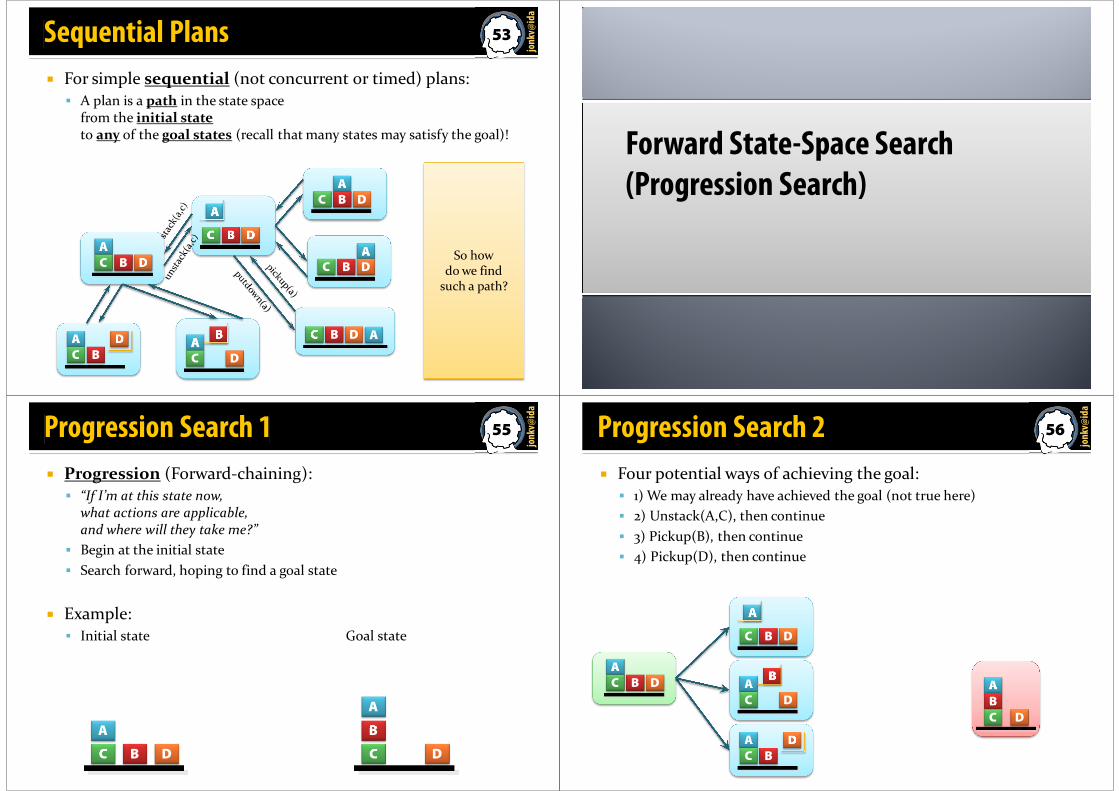
Sequential Plans
� For simple sequential (not concurrent or timed) plans:� A plan is a path in the state space
from the initial stateto any of the goal states (recall that many states may satisfy the goal)!
A
BC D
A
BC
D AB
C D
A
BC D
A
BC D
A
BC D
ABC D
So howdo we find
such a path?
Forward State-Space Search
(Progression Search)
55
jonk
v@ida
Progression Search 1
� Progression (Forward-chaining):� “If I’m at this state now,
what actions are applicable,and where will they take me?”
� Begin at the initial state
� Search forward, hoping to find a goal state
� Example:� Initial state Goal state
C B
A
D C
B
A
D
56
jonk
v@ida
Progression Search 2
� Four potential ways of achieving the goal:� 1) We may already have achieved the goal (not true here)
� 2) Unstack(A,C), then continue
� 3) Pickup(B), then continue
� 4) Pickup(D), then continue
A
B
C D
A
BC D AB
C D
A
BC
D
A
BC D
57
jonk
v@ida
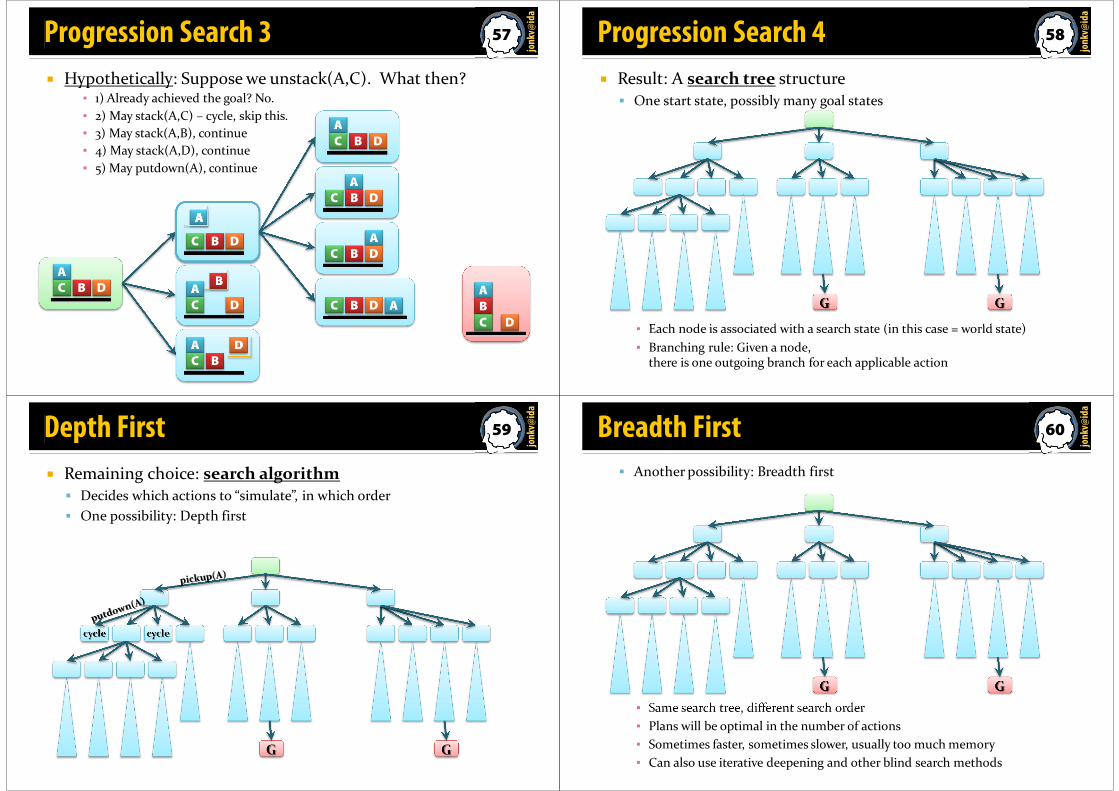
Progression Search 3
� Hypothetically: Suppose we unstack(A,C). What then?▪ 1) Already achieved the goal? No.
▪ 2) May stack(A,C) – cycle, skip this.
▪ 3) May stack(A,B), continue
▪ 4) May stack(A,D), continue
▪ 5) May putdown(A), continue
A
B
C D
A
BC D AB
C D
A
BC
D
A
BC D
A
BC D
A
BC D
A
BC D
ABC D
58
jonk
v@ida
Progression Search 4
� Result: A search tree structure� One start state, possibly many goal states
▪ Each node is associated with a search state (in this case = world state)
▪ Branching rule: Given a node, there is one outgoing branch for each applicable action
GG
59
jonk
v@ida
Depth First
� Remaining choice: search algorithm� Decides which actions to “simulate”, in which order
� One possibility: Depth first
cycle cycle
GG
60
jonk
v@ida
Breadth First
� Another possibility: Breadth first
▪ Same search tree, different search order
▪ Plans will be optimal in the number of actions
▪ Sometimes faster, sometimes slower, usually too much memory
▪ Can also use iterative deepening and other blind search methods
GG
The Difficulty of Planning
62
jonk
v@ida
Forward-chaining Search
� Seems intuitive – but what are the results?� Movie 4 / no-rules
� This search procedure is “blind”: It just tries all variations!
� Is this really a problem? Computers are fast!� What if we have 100 possible actions in each step, not 4 or 5?
� What if a plan requires 100 steps?
▪ 100 plans having 1 step
▪ 10 000 plans having 2 steps
▪ 1 000 000 plans having 3 steps
▪ 100 000 000 plans having 4 steps
▪ 10 000 000 000 plans having 5 steps
▪ …
� Emergency Service Logistics / 20 helicopters, 100 locations 200 boxes:
▪ 7 * 10415 potential plans…
70000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000 plans – but computers are fast…
Assume 1020 (100 billion billion) plans per second: 20000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000 years – but we have multiple cores…
Suppose every particle in the universe is a computer:2000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000 years
63
jonk
v@ida
Hopeless?
� Is there still hope for planning?� Of course there is!
� Our trivial planning method uses blind search – tries everything!
� We wouldn’t choose such silly actions – so why should the computer?
� Planning is part of Artificial Intelligence!� Developing methods to judge what actions are promising given goals
� Rapid progress in the last decade
▪ We are still far from true human-level understanding
▪ But planners are thousands of times faster than 10-15 years ago,even on the same hardware,despite being much more expressive
▪ A very active research area
Heuristic Progression Search
and Domain-Dependent Guidance
65
jonk
v@ida
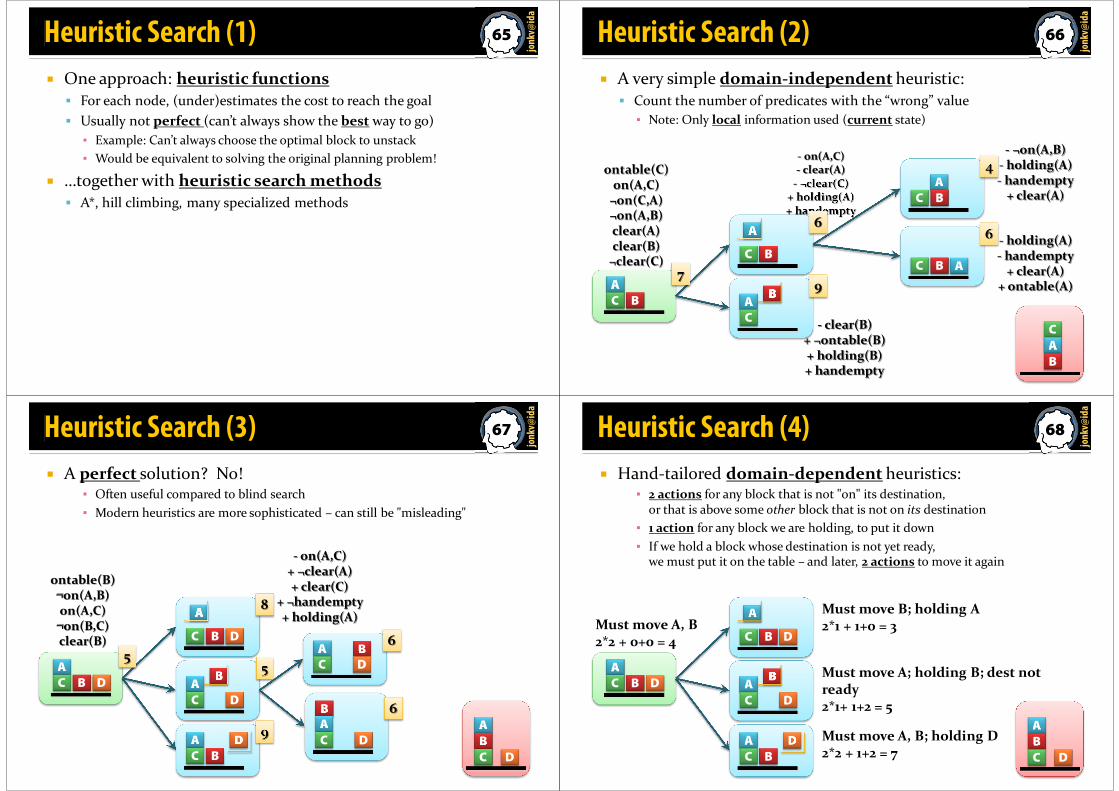
Heuristic Search (1)
� One approach: heuristic functions� For each node, (under)estimates the cost to reach the goal
� Usually not perfect (can’t always show the best way to go)
▪ Example: Can’t always choose the optimal block to unstack
▪ Would be equivalent to solving the original planning problem!
� …together with heuristic search methods� A*, hill climbing, many specialized methods
66
jonk
v@ida
Heuristic Search (2)
� A very simple domain-independent heuristic:� Count the number of predicates with the “wrong” value
▪ Note: Only local information used (current state)
A
BC AB
C
A
BC
7
ontable(C)on(A,C)
¬on(C,A)¬on(A,B)clear(A)clear(B)
¬clear(C)
C
A
B
- on(A,C)- clear(A)
- ¬clear(C)+ holding(A)+ handempty
- clear(B)+ ¬ontable(B)+ holding(B)+ handempty
9
A
BC
4
ABC
6
- ¬on(A,B)- holding(A)- handempty
+ clear(A)
- holding(A)- handempty
+ clear(A)+ ontable(A)
6
67
jonk
v@ida
Heuristic Search (3)
� A perfect solution? No!▪ Often useful compared to blind search
▪ Modern heuristics are more sophisticated – can still be "misleading"
A
BC D AB
C D
A
BC
D
A
BC D
A
B
C D
5
8
5
9
ontable(B)¬on(A,B)on(A,C)¬on(B,C)clear(B)
B
A
C D
6
BA
C D
6
- on(A,C)+ ¬clear(A)+ clear(C)
+ ¬handempty+ holding(A)
68
jonk
v@ida
Heuristic Search (4)
� Hand-tailored domain-dependent heuristics:▪ 2 actions for any block that is not "on" its destination,
or that is above some other block that is not on its destination
▪ 1 action for any block we are holding, to put it down
▪ If we hold a block whose destination is not yet ready,we must put it on the table – and later, 2 actions to move it again
A
BC D AB
C D
A
BC
D
A
BC D
A
B
C D
Must move B; holding A2*1 + 1+0 = 3
Must move A; holding B; dest not ready2*1+ 1+2 = 5
Must move A, B; holding D2*2 + 1+2 = 7
Must move A, B2*2 + 0+0 = 4
69
jonk
v@ida
Domain-Dependent Guidance
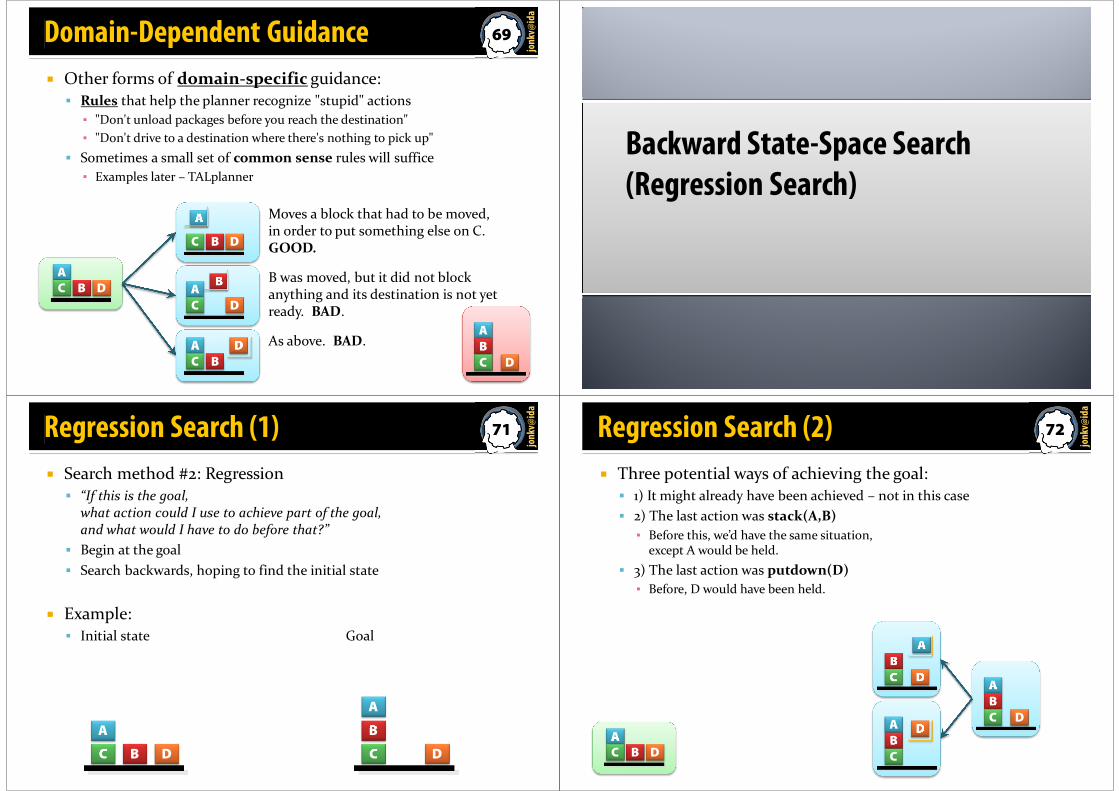
� Other forms of domain-specific guidance:� Rules that help the planner recognize "stupid" actions
▪ "Don't unload packages before you reach the destination"
▪ "Don't drive to a destination where there's nothing to pick up"
� Sometimes a small set of common sense rules will suffice
▪ Examples later – TALplanner
A
BC D AB
C D
A
BC
D
A
BC D
A
B
C D
Moves a block that had to be moved,in order to put something else on C.GOOD.
B was moved, but it did not block anything and its destination is not yet ready. BAD.
As above. BAD.
Backward State-Space Search
(Regression Search)
71
jonk
v@ida
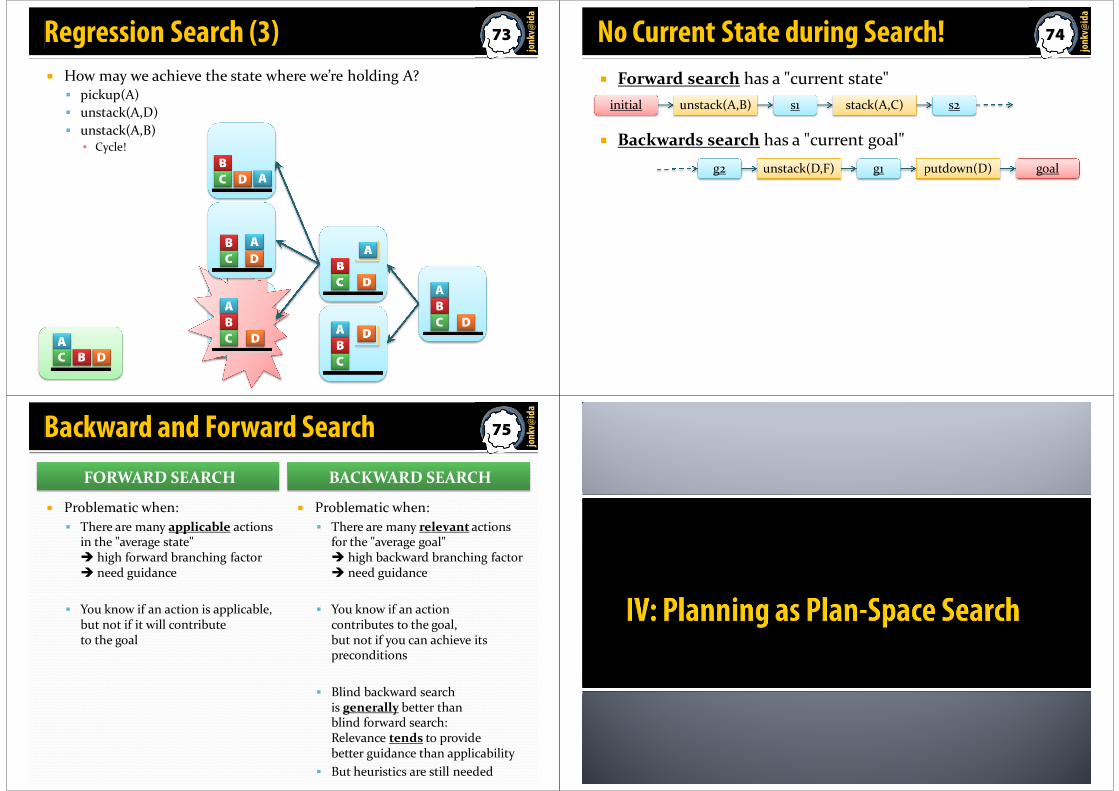
Regression Search (1)
� Search method #2: Regression� “If this is the goal,
what action could I use to achieve part of the goal,and what would I have to do before that?”
� Begin at the goal
� Search backwards, hoping to find the initial state
� Example:� Initial state Goal
C B
A
D C
B
A
D
72
jonk
v@ida
Regression Search (2)
� Three potential ways of achieving the goal:� 1) It might already have been achieved – not in this case
� 2) The last action was stack(A,B)
▪ Before this, we’d have the same situation,except A would be held.
� 3) The last action was putdown(D)
▪ Before, D would have been held.
A
B
C D
A
BC D
A
B
C D
A
B
C
D
73
jonk
v@ida
Regression Search (3)
� How may we achieve the state where we’re holding A?� pickup(A)
� unstack(A,D)
� unstack(A,B)▪ Cycle!
A
B
C D
A
BC D
A
B
C D
A
B
C
D
A
B
C D
AB
C D
A
B
C D
74
jonk
v@ida
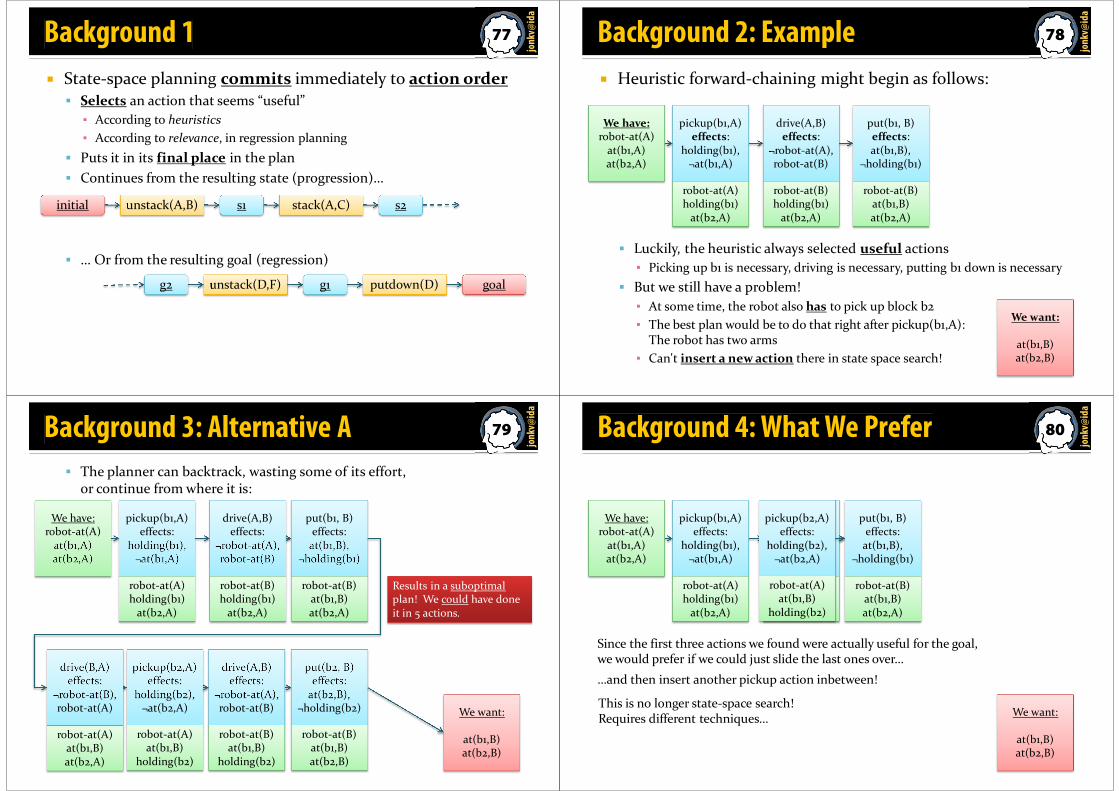
No Current State during Search!
� Forward search has a "current state"
� Backwards search has a "current goal"
goalputdown(D)unstack(D,F) g1g2
initial s2stack(A,C)unstack(A,B) s1
75
jonk
v@ida
Backward and Forward Search
FORWARD SEARCH
� Problematic when:
� There are many applicable actionsin the "average state"� high forward branching factor� need guidance
� You know if an action is applicable,but not if it will contributeto the goal
BACKWARD SEARCH
� Problematic when:
� There are many relevant actionsfor the "average goal"� high backward branching factor� need guidance
� You know if an action contributes to the goal,but not if you can achieve its preconditions
� Blind backward searchis generally better thanblind forward search:Relevance tends to providebetter guidance than applicability
� But heuristics are still needed
77
jonk
v@ida
Background 1
� State-space planning commits immediately to action order� Selects an action that seems “useful”
▪ According to heuristics
▪ According to relevance, in regression planning
� Puts it in its final place in the plan
� Continues from the resulting state (progression)…
� … Or from the resulting goal (regression)
goalputdown(D)unstack(D,F) g1g2
initial s2stack(A,C)unstack(A,B) s1
78
jonk
v@ida
Background 2: Example
� Heuristic forward-chaining might begin as follows:
� Luckily, the heuristic always selected useful actions
▪ Picking up b1 is necessary, driving is necessary, putting b1 down is necessary
� But we still have a problem!
▪ At some time, the robot also has to pick up block b2
▪ The best plan would be to do that right after pickup(b1,A):The robot has two arms
▪ Can't insert a new action there in state space search!
put(b1, B)effects:at(b1,B),
¬holding(b1)
We want:
at(b1,B)at(b2,B)
We have:robot-at(A)
at(b1,A)at(b2,A)
drive(A,B)effects:
¬robot-at(A),robot-at(B)
pickup(b1,A)effects:
holding(b1),¬at(b1,A)
robot-at(A)holding(b1)
at(b2,A)
robot-at(B)holding(b1)
at(b2,A)
robot-at(B)at(b1,B)at(b2,A)
79
jonk
v@ida
Background 3: Alternative A
� The planner can backtrack, wasting some of its effort,or continue from where it is:
put(b1, B)effects:
at(b1,B),¬holding(b1)
We want:
at(b1,B)at(b2,B)
We have:robot-at(A)
at(b1,A)at(b2,A)
put(b2, B)effects:
at(b2,B),¬holding(b2)
drive(A,B)effects:
¬robot-at(A),robot-at(B)
pickup(b1,A)effects:
holding(b1),¬at(b1,A)
pickup(b2,A)effects:
holding(b2),¬at(b2,A)
drive(B,A)effects:
¬robot-at(B), robot-at(A)
drive(A,B)effects:
¬robot-at(A), robot-at(B)
robot-at(A)holding(b1)
at(b2,A)
robot-at(B)holding(b1)
at(b2,A)
robot-at(B)at(b1,B)at(b2,A)
robot-at(A)at(b1,B)at(b2,A)
robot-at(A)at(b1,B)
holding(b2)
robot-at(B)at(b1,B)
holding(b2)
robot-at(B)at(b1,B)at(b2,B)
Results in a suboptimalplan! We could have done it in 5 actions.
80
jonk
v@ida
Background 4: What We Prefer
We want:
at(b1,B)at(b2,B)
We have:robot-at(A)
at(b1,A)at(b2,A)
pickup(b1,A)effects:
holding(b1),¬at(b1,A)
Since the first three actions we found were actually useful for the goal,we would prefer if we could just slide the last ones over…
robot-at(A)holding(b1)
at(b2,A)
put(b1, B)effects:
at(b1,B),¬holding(b1)
drive(A,B)effects:
¬robot-at(A),robot-at(B)
robot-at(B)holding(b1)
at(b2,A)
robot-at(B)at(b1,B)at(b2,A)
pickup(b2,A)effects:
holding(b2),¬at(b2,A)
robot-at(A)at(b1,B)
holding(b2)
…and then insert another pickup action inbetween!
This is no longer state-space search!Requires different techniques…
Generating Partial-Order Plans
82
jonk
v@ida
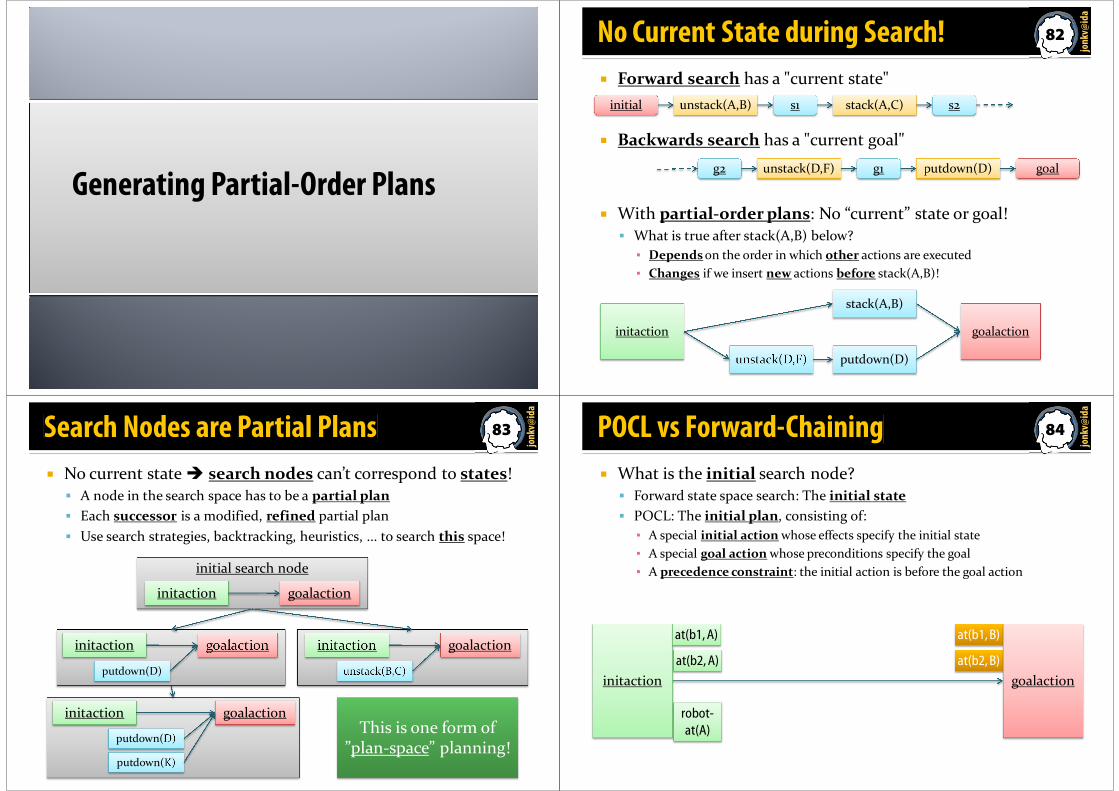
No Current State during Search!
� Forward search has a "current state"
� Backwards search has a "current goal"
� With partial-order plans: No “current” state or goal!� What is true after stack(A,B) below?
▪ Depends on the order in which other actions are executed
▪ Changes if we insert new actions before stack(A,B)!
stack(A,B)
putdown(D)unstack(D,F)
goalputdown(D)unstack(D,F) g1g2
initial s2stack(A,C)unstack(A,B) s1
goalactioninitaction
83
jonk
v@ida
Search Nodes are Partial Plans
� No current state � search nodes can’t correspond to states!� A node in the search space has to be a partial plan
� Each successor is a modified, refined partial plan
� Use search strategies, backtracking, heuristics, ... to search this space!
initial search node
initaction goalaction
initaction goalaction
putdown(D)
initaction goalaction
unstack(B,C)
initaction goalaction
putdown(D)
putdown(K)
This is one form of ”plan-space” planning!
84
jonk
v@ida
POCL vs Forward-Chaining
� What is the initial search node?� Forward state space search: The initial state
� POCL: The initial plan, consisting of:
▪ A special initial action whose effects specify the initial state
▪ A special goal action whose preconditions specify the goal
▪ A precedence constraint: the initial action is before the goal action
at(b1, B)
at(b2, B)
goalactioninitaction
at(b1, A)
at(b2, A)
robot-at(A)
85
jonk
v@ida
POCL vs Forward-Chaining
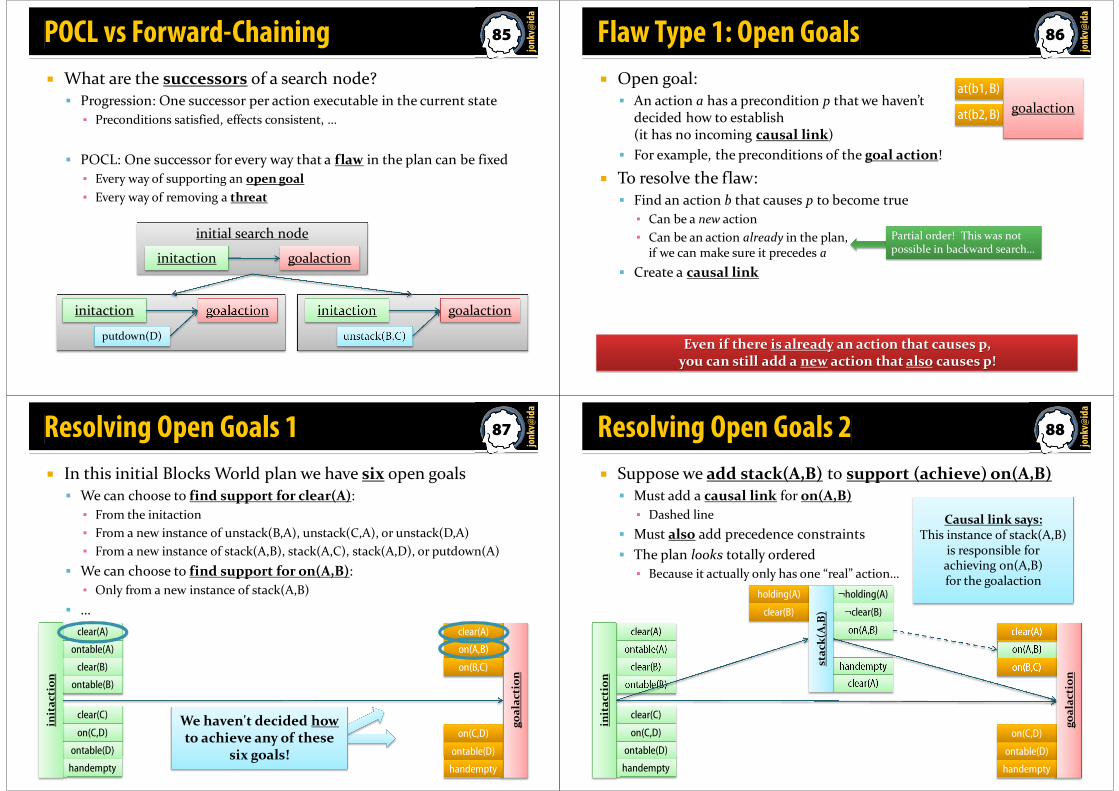
� What are the successors of a search node?� Progression: One successor per action executable in the current state
▪ Preconditions satisfied, effects consistent, …
� POCL: One successor for every way that a flaw in the plan can be fixed
▪ Every way of supporting an open goal
▪ Every way of removing a threat
initial search node
initaction goalaction
initaction goalaction
putdown(D)
initaction goalaction
unstack(B,C)
86
jonk
v@ida
Flaw Type 1: Open Goals
� Open goal:� An action a has a precondition p that we haven’t
decided how to establish(it has no incoming causal link)
� For example, the preconditions of the goal action!
� To resolve the flaw:� Find an action b that causes p to become true
▪ Can be a new action
▪ Can be an action already in the plan,if we can make sure it precedes a
� Create a causal link
Partial order! This was not possible in backward search…
Even if there is already an action that causes p,you can still add a new action that also causes p!
at(b1, B)
at(b2, B) goalaction
87
jonk
v@ida
Resolving Open Goals 1
� In this initial Blocks World plan we have six open goals� We can choose to find support for clear(A):
▪ From the initaction
▪ From a new instance of unstack(B,A), unstack(C,A), or unstack(D,A)
▪ From a new instance of stack(A,B), stack(A,C), stack(A,D), or putdown(A)
� We can choose to find support for on(A,B):
▪ Only from a new instance of stack(A,B)
� …
on(A,B)
on(B,C)
on(C,D)
ontable(D)
handempty
clear(A)clear(A)
ontable(A)
clear(B)
ontable(B)
clear(C)
on(C,D)
ontable(D)
handempty
init
act
ion
go
ala
ctio
n
We haven't decided howto achieve any of these
six goals!
88
jonk
v@ida
Resolving Open Goals 2
� Suppose we add stack(A,B) to support (achieve) on(A,B)� Must add a causal link for on(A,B)
▪ Dashed line
� Must also add precedence constraints
� The plan looks totally ordered
▪ Because it actually only has one “real” action…
holding(A)
clear(B)
¬holding(A)
clear(A)
ontable(A)
clear(B)
ontable(B)
clear(C)
on(C,D)
ontable(D)
handempty
init
act
ion
on(A,B)
on(B,C)
on(C,D)
ontable(D)
handempty
clear(A)
go
ala
ctio
n
¬clear(B)
on(A,B)
handempty
clear(A)
sta
ck(A
,B)
Causal link says:This instance of stack(A,B)
is responsible forachieving on(A,B)for the goalaction
89
jonk
v@ida
Resolving Open Goals 3
� Now we have 7 open goals� We can choose to find support for clear(A):
▪ From the initaction
▪ From the instance of stack(A,B) that we just added
▪ From a new instance of stack(A,B), stack(A,C), stack(A,D), or putdown(A)
▪ From a new instance of unstack(B,A), unstack(C,A), or unstack(D,A)
� … holding(A)
clear(B)
¬holding(A)
clear(A)
ontable(A)
clear(B)
ontable(B)
clear(C)
on(C,D)
ontable(D)
handempty
init
act
ion
on(A,B)
on(B,C)
on(C,D)
ontable(D)
handempty
clear(A)
go
ala
ctio
n
¬clear(B)
on(A,B)
handempty
clear(A)
sta
ck(A
,B)
90
jonk
v@ida
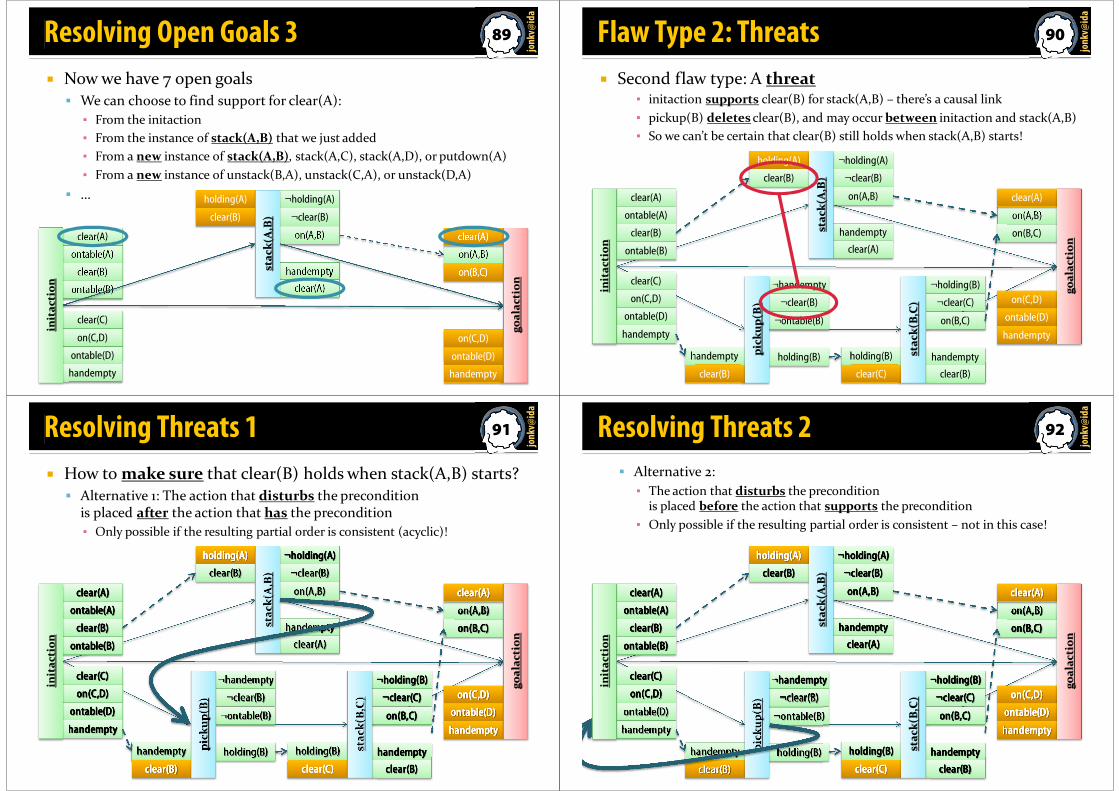
Flaw Type 2: Threats
� Second flaw type: A threat▪ initaction supports clear(B) for stack(A,B) – there’s a causal link
▪ pickup(B) deletes clear(B), and may occur between initaction and stack(A,B)
▪ So we can’t be certain that clear(B) still holds when stack(A,B) starts!
holding(A)
clear(B)
¬holding(A)
clear(A)
ontable(A)
clear(B)
ontable(B)
clear(C)
on(C,D)
ontable(D)
handempty
init
act
ion
on(A,B)
on(B,C)
on(C,D)
ontable(D)
handempty
clear(A)
go
ala
ctio
n
¬clear(B)
on(A,B)
handempty
clear(A)
sta
ck(A
,B)
holding(B)
clear(C)
¬holding(B)
¬clear(C)
on(B,C)
handempty
clear(B)
sta
ck(B
,C)
handempty
clear(B)
¬handempty
¬clear(B)
¬ontable(B)
holding(B)pic
ku
p(B
)
91
jonk
v@ida
Resolving Threats 1
� How to make sure that clear(B) holds when stack(A,B) starts?� Alternative 1: The action that disturbs the precondition
is placed after the action that has the precondition
▪ Only possible if the resulting partial order is consistent (acyclic)!
holding(A)holding(A)holding(A)holding(A)
clear(B)clear(B)clear(B)clear(B)
¬holding(A)¬holding(A)¬holding(A)¬holding(A)
clear(A)clear(A)clear(A)clear(A)
ontableontableontableontable(A)(A)(A)(A)
clear(B)clear(B)clear(B)clear(B)
ontableontableontableontable(B)(B)(B)(B)
clear(C)clear(C)clear(C)clear(C)
on(C,D)on(C,D)on(C,D)on(C,D)
ontableontableontableontable(D)(D)(D)(D)
handemptyhandemptyhandemptyhandempty
init
act
ion
on(A,B)on(A,B)on(A,B)on(A,B)
on(B,C)on(B,C)on(B,C)on(B,C)
on(C,D)on(C,D)on(C,D)on(C,D)
ontableontableontableontable(D)(D)(D)(D)
handemptyhandemptyhandemptyhandempty
clear(A)clear(A)clear(A)clear(A)
go
ala
ctio
n
¬clear(B)¬clear(B)¬clear(B)¬clear(B)
on(A,B)on(A,B)on(A,B)on(A,B)
handemptyhandemptyhandemptyhandempty
clear(A)clear(A)clear(A)clear(A)
sta
ck(A
,B)
holding(B)holding(B)holding(B)holding(B)
clear(C)clear(C)clear(C)clear(C)
¬¬¬¬holding(B)holding(B)holding(B)holding(B)
¬¬¬¬clear(C)clear(C)clear(C)clear(C)
on(B,C)on(B,C)on(B,C)on(B,C)
handemptyhandemptyhandemptyhandempty
clear(B)clear(B)clear(B)clear(B)
sta
ck(B
,C)
handemptyhandemptyhandemptyhandempty
clear(B)clear(B)clear(B)clear(B)
¬¬¬¬handemptyhandemptyhandemptyhandempty
¬clear(B)¬clear(B)¬clear(B)¬clear(B)
¬¬¬¬ontableontableontableontable(B(B(B(B))))
holding(B)holding(B)holding(B)holding(B)pic
ku
p(B
)
92
jonk
v@ida
Resolving Threats 2
� Alternative 2:
▪ The action that disturbs the preconditionis placed before the action that supports the precondition
▪ Only possible if the resulting partial order is consistent – not in this case!
holding(A)holding(A)holding(A)holding(A)
clear(B)clear(B)clear(B)clear(B)
¬holding(A)¬holding(A)¬holding(A)¬holding(A)
clear(A)clear(A)clear(A)clear(A)
ontableontableontableontable(A)(A)(A)(A)
clear(B)clear(B)clear(B)clear(B)
ontableontableontableontable(B)(B)(B)(B)
clear(C)clear(C)clear(C)clear(C)
on(C,D)on(C,D)on(C,D)on(C,D)
ontableontableontableontable(D)(D)(D)(D)
handemptyhandemptyhandemptyhandempty
init
act
ion
on(A,B)on(A,B)on(A,B)on(A,B)
on(B,C)on(B,C)on(B,C)on(B,C)
on(C,D)on(C,D)on(C,D)on(C,D)
ontableontableontableontable(D)(D)(D)(D)
handemptyhandemptyhandemptyhandempty
clear(A)clear(A)clear(A)clear(A)
go
ala
ctio
n
¬clear(B)¬clear(B)¬clear(B)¬clear(B)
on(A,B)on(A,B)on(A,B)on(A,B)
handemptyhandemptyhandemptyhandempty
clear(A)clear(A)clear(A)clear(A)
sta
ck(A
,B)
holding(B)holding(B)holding(B)holding(B)
clear(C)clear(C)clear(C)clear(C)
¬¬¬¬holding(B)holding(B)holding(B)holding(B)
¬¬¬¬clear(C)clear(C)clear(C)clear(C)
on(B,C)on(B,C)on(B,C)on(B,C)
handemptyhandemptyhandemptyhandempty
clear(B)clear(B)clear(B)clear(B)
sta
ck(B
,C)
handemptyhandemptyhandemptyhandempty
clear(B)clear(B)clear(B)clear(B)
¬¬¬¬handemptyhandemptyhandemptyhandempty
¬clear(B)¬clear(B)¬clear(B)¬clear(B)
¬¬¬¬ontableontableontableontable(B(B(B(B))))
holding(B)holding(B)holding(B)holding(B)pic
ku
p(B
)
93
jonk
v@ida
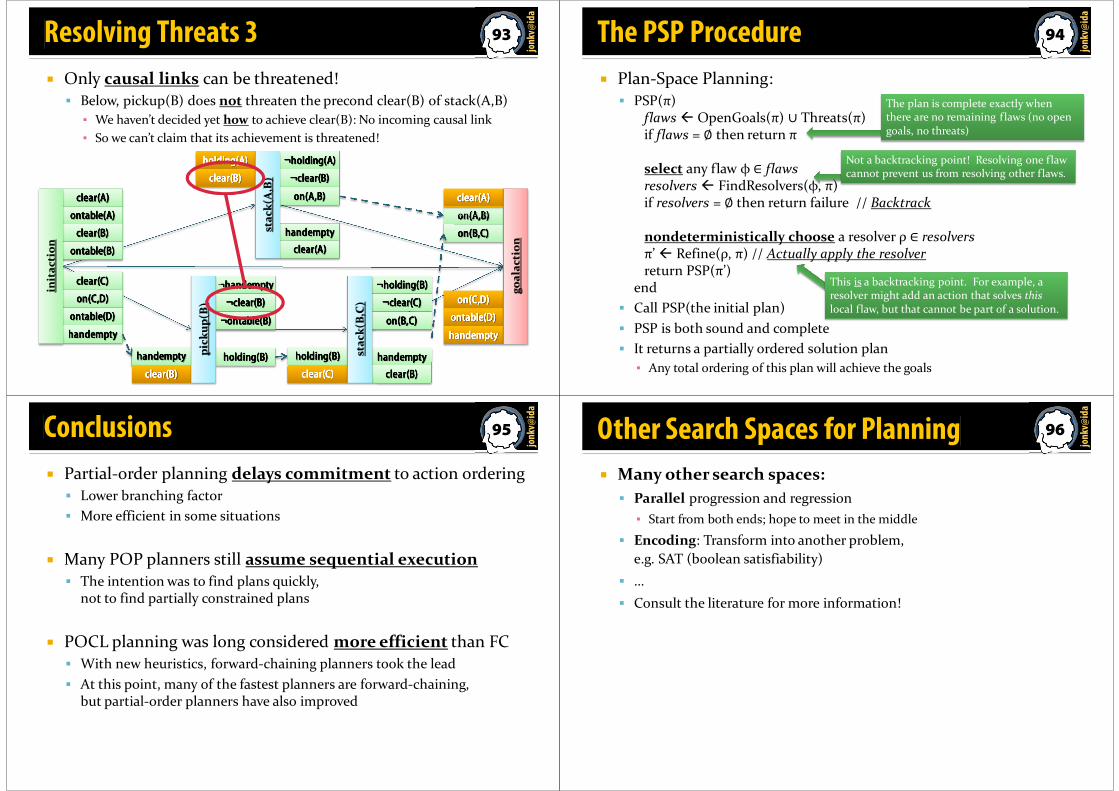
Resolving Threats 3
� Only causal links can be threatened!� Below, pickup(B) does not threaten the precond clear(B) of stack(A,B)
▪ We haven’t decided yet how to achieve clear(B): No incoming causal link
▪ So we can’t claim that its achievement is threatened!
holding(A)holding(A)holding(A)holding(A)
clear(B)clear(B)clear(B)clear(B)
¬holding(A)¬holding(A)¬holding(A)¬holding(A)
clear(A)clear(A)clear(A)clear(A)
ontableontableontableontable(A)(A)(A)(A)
clear(B)clear(B)clear(B)clear(B)
ontableontableontableontable(B)(B)(B)(B)
clear(C)clear(C)clear(C)clear(C)
on(C,D)on(C,D)on(C,D)on(C,D)
ontableontableontableontable(D)(D)(D)(D)
handemptyhandemptyhandemptyhandempty
init
act
ion
on(A,B)on(A,B)on(A,B)on(A,B)
on(B,C)on(B,C)on(B,C)on(B,C)
on(C,D)on(C,D)on(C,D)on(C,D)
ontableontableontableontable(D)(D)(D)(D)
handemptyhandemptyhandemptyhandempty
clear(A)clear(A)clear(A)clear(A)
go
ala
ctio
n
¬clear(B)¬clear(B)¬clear(B)¬clear(B)
on(A,B)on(A,B)on(A,B)on(A,B)
handemptyhandemptyhandemptyhandempty
clear(A)clear(A)clear(A)clear(A)
sta
ck(A
,B)
holding(B)holding(B)holding(B)holding(B)
clear(C)clear(C)clear(C)clear(C)
¬¬¬¬holding(B)holding(B)holding(B)holding(B)
¬¬¬¬clear(C)clear(C)clear(C)clear(C)
on(B,C)on(B,C)on(B,C)on(B,C)
handemptyhandemptyhandemptyhandempty
clear(B)clear(B)clear(B)clear(B)
sta
ck(B
,C)
handemptyhandemptyhandemptyhandempty
clear(B)clear(B)clear(B)clear(B)
¬¬¬¬handemptyhandemptyhandemptyhandempty
¬clear(B)¬clear(B)¬clear(B)¬clear(B)
¬¬¬¬ontableontableontableontable(B(B(B(B))))
holding(B)holding(B)holding(B)holding(B)pic
ku
p(B
)
94
jonk
v@ida
The PSP Procedure
� Plan-Space Planning:� PSP(π)
flaws � OpenGoals(π) ∪ Threats(π)if flaws = ∅ then return π
select any flaw φ ∈ flawsresolvers � FindResolvers(φ, π)if resolvers = ∅ then return failure // Backtrack
nondeterministically choose a resolver ρ ∈ resolversπ’ � Refine(ρ, π) // Actually apply the resolverreturn PSP(π’)
end
� Call PSP(the initial plan)
� PSP is both sound and complete
� It returns a partially ordered solution plan
▪ Any total ordering of this plan will achieve the goals
Not a backtracking point! Resolving one flaw cannot prevent us from resolving other flaws.
This is a backtracking point. For example, a resolver might add an action that solves thislocal f law, but that cannot be part of a solution.
The plan is complete exactly when there are no remaining flaws (no open goals, no threats)
95
jonk
v@ida
Conclusions
� Partial-order planning delays commitment to action ordering� Lower branching factor
� More efficient in some situations
� Many POP planners still assume sequential execution� The intention was to find plans quickly,
not to find partially constrained plans
� POCL planning was long considered more efficient than FC� With new heuristics, forward-chaining planners took the lead
� At this point, many of the fastest planners are forward-chaining,but partial-order planners have also improved
96
jonk
v@ida
Other Search Spaces for Planning
� Many other search spaces:
� Parallel progression and regression
▪ Start from both ends; hope to meet in the middle
� Encoding: Transform into another problem,
e.g. SAT (boolean satisfiability)
� …
� Consult the literature for more information!
98
jonk
v@ida
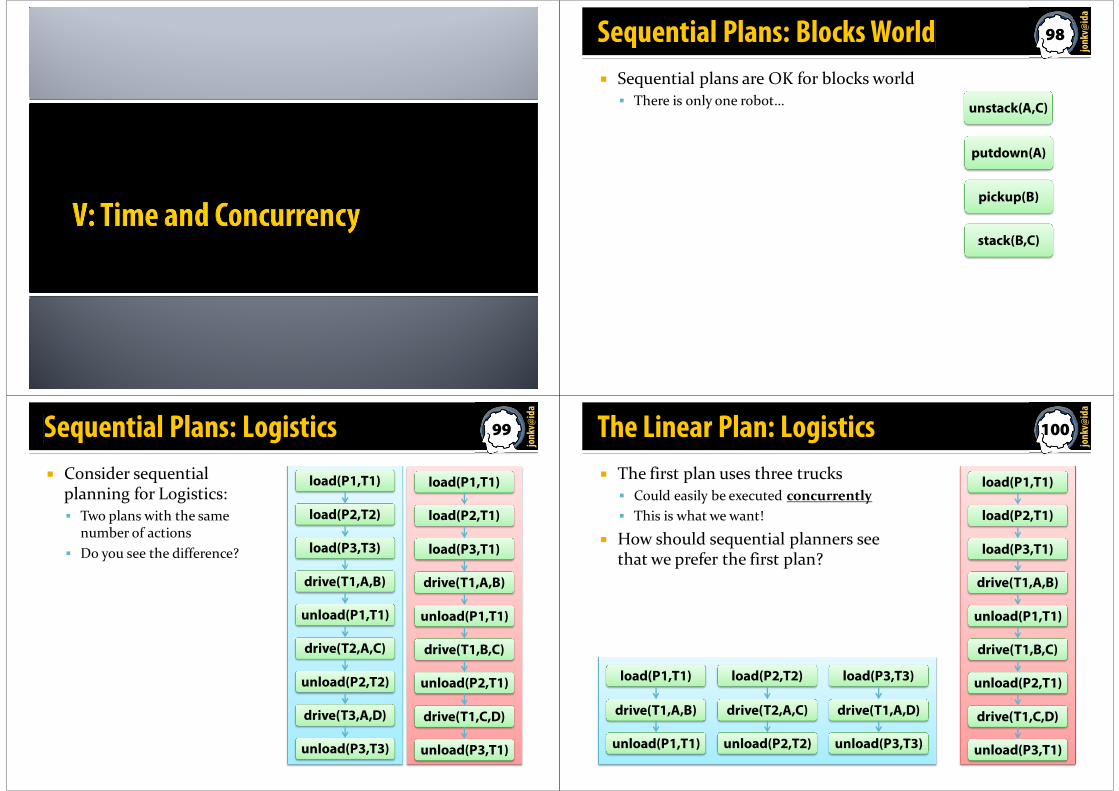
Sequential Plans: Blocks World
� Sequential plans are OK for blocks world� There is only one robot…
pickup(B)
putdown(A)
unstack(A,C)
stack(B,C)
99
jonk
v@ida
Sequential Plans: Logistics
� Consider sequentialplanning for Logistics:� Two plans with the same
number of actions
� Do you see the difference?
load(P1,T1)
load(P2,T1)
load(P3,T1)
drive(T1,A,B)
unload(P1,T1)
drive(T1,B,C)
unload(P2,T1)
drive(T1,C,D)
unload(P3,T1)
load(P1,T1)
load(P2,T2)
load(P3,T3)
drive(T1,A,B)
unload(P1,T1)
drive(T2,A,C)
unload(P2,T2)
drive(T3,A,D)
unload(P3,T3)
100
jonk
v@ida
The Linear Plan: Logistics
� The first plan uses three trucks� Could easily be executed concurrently
� This is what we want!
� How should sequential planners seethat we prefer the first plan?
load(P1,T1)
load(P2,T1)
load(P3,T1)
drive(T1,A,B)
unload(P1,T1)
drive(T1,B,C)
unload(P2,T1)
drive(T1,C,D)
unload(P3,T1)
load(P1,T1) load(P2,T2) load(P3,T3)
drive(T1,A,B)
unload(P1,T1)
drive(T2,A,C)
unload(P2,T2)
drive(T1,A,D)
unload(P3,T3)
101
jonk
v@ida
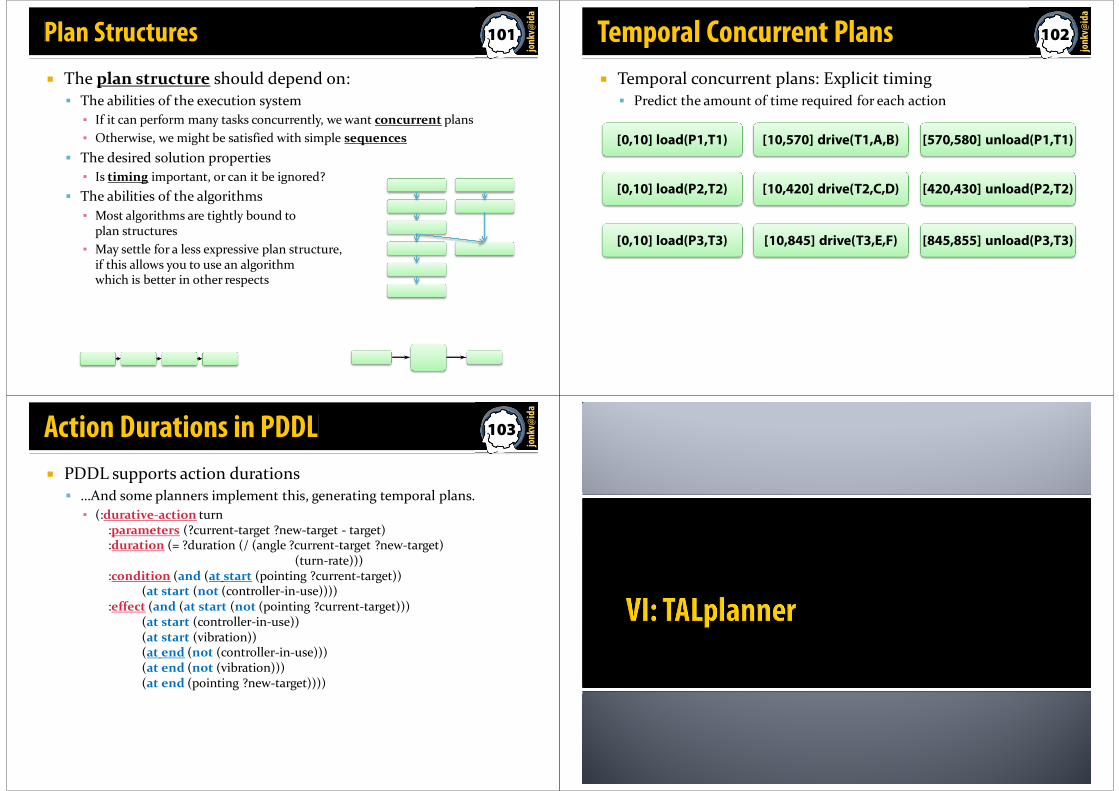
Plan Structures
� The plan structure should depend on:� The abilities of the execution system
▪ If it can perform many tasks concurrently, we want concurrent plans
▪ Otherwise, we might be satisfied with simple sequences
� The desired solution properties
▪ Is timing important, or can it be ignored?
� The abilities of the algorithms
▪ Most algorithms are tightly bound toplan structures
▪ May settle for a less expressive plan structure,if this allows you to use an algorithmwhich is better in other respects
102
jonk
v@ida
Temporal Concurrent Plans
� Temporal concurrent plans: Explicit timing� Predict the amount of time required for each action
[0,10] load(P1,T1) [10,570] drive(T1,A,B) [570,580] unload(P1,T1)
[0,10] load(P2,T2) [10,420] drive(T2,C,D) [420,430] unload(P2,T2)
[0,10] load(P3,T3) [10,845] drive(T3,E,F) [845,855] unload(P3,T3)
103
jonk
v@ida
Action Durations in PDDL
� PDDL supports action durations� …And some planners implement this, generating temporal plans.
▪ (:durative-action turn:parameters (?current-target ?new-target - target):duration (= ?duration (/ (angle ?current-target ?new-target)
(turn-rate))):condition (and (at start (pointing ?current-target))
(at start (not (controller-in-use)))):effect (and (at start (not (pointing ?current-target)))
(at start (controller-in-use))(at start (vibration))(at end (not (controller-in-use)))(at end (not (vibration)))(at end (pointing ?new-target))))
105
jonk
v@ida
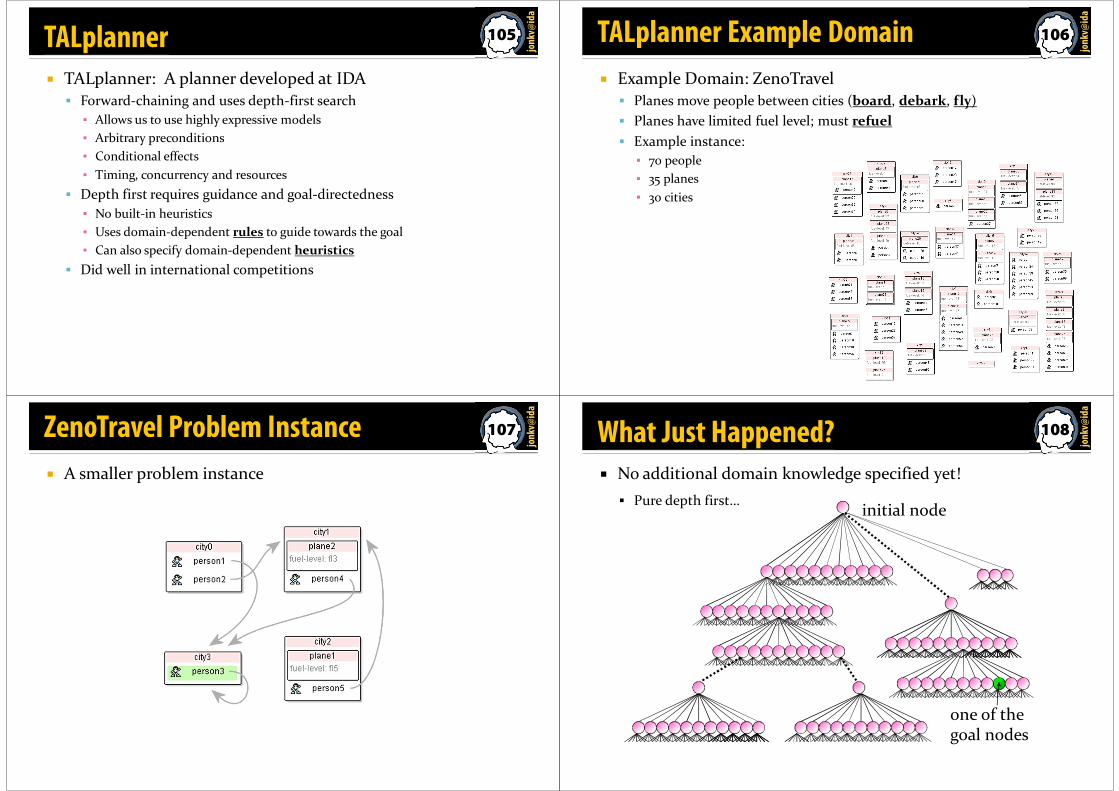
TALplanner
� TALplanner: A planner developed at IDA� Forward-chaining and uses depth-first search
▪ Allows us to use highly expressive models
▪ Arbitrary preconditions
▪ Conditional effects
▪ Timing, concurrency and resources
� Depth first requires guidance and goal-directedness
▪ No built-in heuristics
▪ Uses domain-dependent rules to guide towards the goal
▪ Can also specify domain-dependent heuristics
� Did well in international competitions
106
jonk
v@ida
TALplanner Example Domain
� Example Domain: ZenoTravel� Planes move people between cities (board, debark, fly)
� Planes have limited fuel level; must refuel
� Example instance:
▪ 70 people
▪ 35 planes
▪ 30 cities
107
jonk
v@ida
ZenoTravel Problem Instance
� A smaller problem instance
108
jonk
v@ida
What Just Happened?
� No additional domain knowledge specified yet!
� Pure depth first…initial node
one of thegoal nodes
109
jonk
v@ida
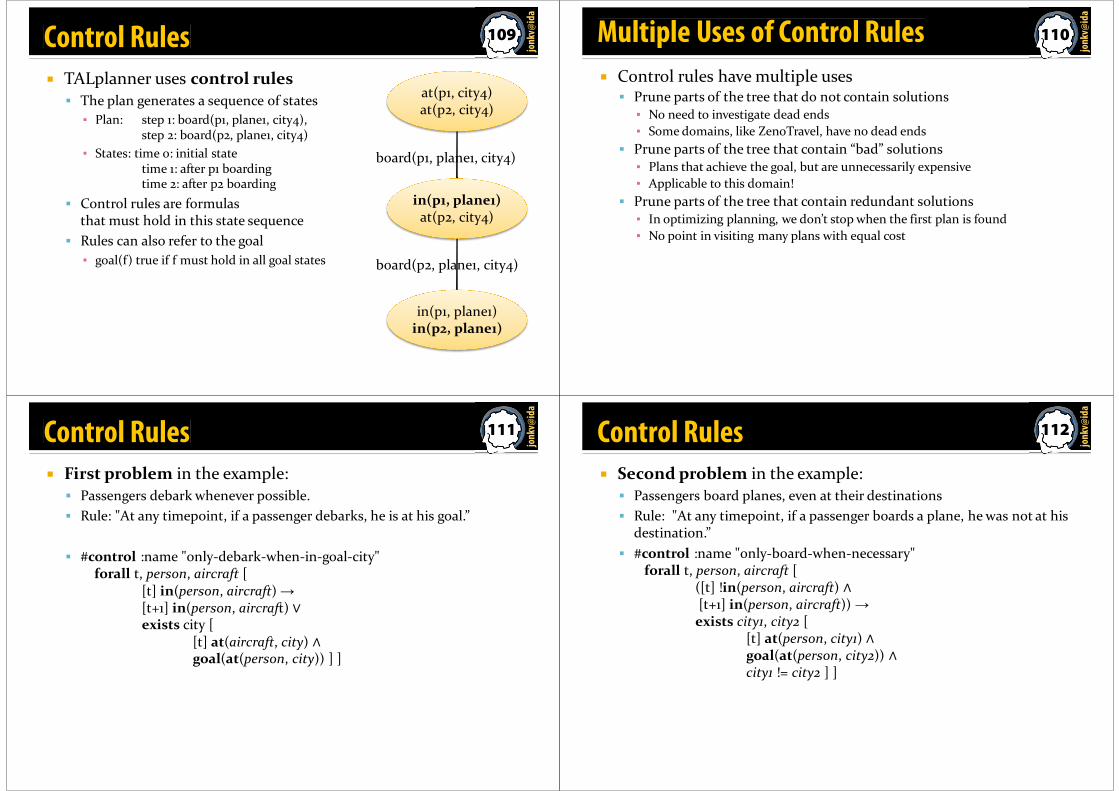
Control Rules
� TALplanner uses control rules� The plan generates a sequence of states
▪ Plan: step 1: board(p1, plane1, city4),step 2: board(p2, plane1, city4)
▪ States: time 0: initial statetime 1: after p1 boardingtime 2: after p2 boarding
� Control rules are formulasthat must hold in this state sequence
� Rules can also refer to the goal
▪ goal(f) true if f must hold in all goal states
at(p1, city4)at(p2, city4)
board(p1, plane1, city4)
board(p2, plane1, city4)
in(p1, plane1)at(p2, city4)
in(p1, plane1)in(p2, plane1)
110
jonk
v@ida
Multiple Uses of Control Rules
� Control rules have multiple uses� Prune parts of the tree that do not contain solutions▪ No need to investigate dead ends
▪ Some domains, like ZenoTravel, have no dead ends
� Prune parts of the tree that contain “bad” solutions▪ Plans that achieve the goal, but are unnecessarily expensive
▪ Applicable to this domain!
� Prune parts of the tree that contain redundant solutions▪ In optimizing planning, we don’t stop when the first plan is found
▪ No point in visiting many plans with equal cost
111
jonk
v@ida
Control Rules
� First problem in the example:� Passengers debark whenever possible.
� Rule: "At any timepoint, if a passenger debarks, he is at his goal.”
� #control :name "only-debark-when-in-goal-city"forall t, person, aircraft [
[t] in(person, aircraft) →[t+1] in(person, aircraft) ∨exists city [
[t] at(aircraft, city) ∧goal(at(person, city)) ] ]
112
jonk
v@ida
Control Rules
� Second problem in the example:� Passengers board planes, even at their destinations
� Rule: "At any timepoint, if a passenger boards a plane, he was not at his destination.”
� #control :name "only-board-when-necessary"forall t, person, aircraft [
([t] !in(person, aircraft) ∧[t+1] in(person, aircraft)) →
exists city1, city2 [[t] at(person, city1) ∧goal(at(person, city2)) ∧city1 != city2 ] ]
113
jonk
v@ida
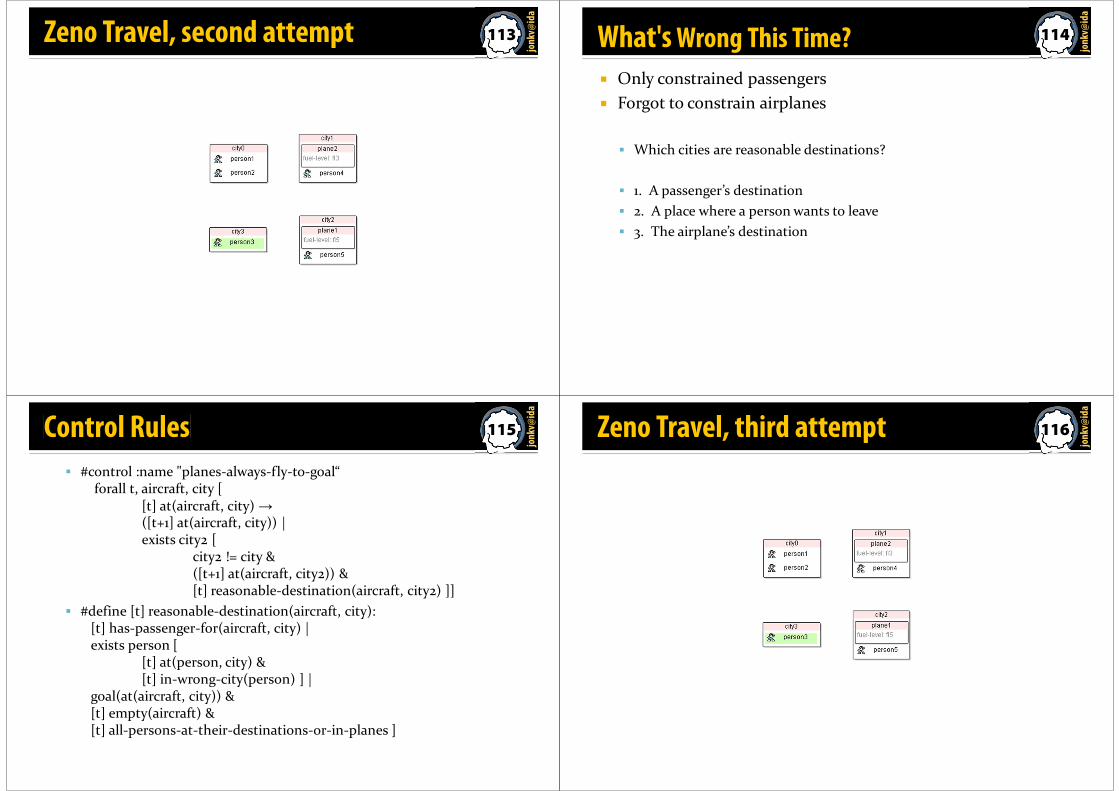
Zeno Travel, second attempt 114
jonk
v@ida
What'sWrong This Time?
� Only constrained passengers
� Forgot to constrain airplanes
� Which cities are reasonable destinations?
� 1. A passenger’s destination
� 2. A place where a person wants to leave
� 3. The airplane’s destination
115
jonk
v@ida
Control Rules
� #control :name "planes-always-fly-to-goal“forall t, aircraft, city [
[t] at(aircraft, city) →([t+1] at(aircraft, city)) |exists city2 [
city2 != city &([t+1] at(aircraft, city2)) &[t] reasonable-destination(aircraft, city2) ]]
� #define [t] reasonable-destination(aircraft, city):[t] has-passenger-for(aircraft, city) |exists person [
[t] at(person, city) &[t] in-wrong-city(person) ] |
goal(at(aircraft, city)) &[t] empty(aircraft) &[t] all-persons-at-their-destinations-or-in-planes ]
116
jonk
v@ida
Zeno Travel, third attempt
117
jonk
v@ida
Positive Side Effects
� Positive effects of using domain knowledge:� Better performance than domain-independent heuristics▪ When you’ve found the right control rules!
� Can use more detailed domain models▪ With control rules, this has a smaller impact on performance
� Can generate better plans▪ Can prune non-solutions, but also bad solutions
� Negative effects of using domain knowledge:� Requires more knowledge
� Requires more domain engineering
� Rules are sometimes easy to find, sometimes difficult
� As always: A tradeoff!





























