Embed Size (px)
Citation preview

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 1
Introduction to Real-time Operating Systems
An Introduction to ORCOS Daniel Baldin <[email protected]>

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 2
ORCOS Organic Re-Configurable Operating System
Source: RAMMIG, 2009
§ ORCOS is a Real-Time Operating System developed by our Workgroup (2008) https://orcos.cs.uni-paderborn.de/
§ Current Operating Systems - Try to meet the requirements by reducing their size -> Reduction in functionality
§ ORCOS Vision - Distributed operating system service over many nodes - Full OS functionality with small scale nodes - Use biologically inspired algorithms for communication
§ Development Goal - Develop a new real-time capable, configurable basic operating system with small footprint - Capability to transparently use services of other ORCOS nodes - Mainly used for research projects and student education

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 3
ORCOS vs. General Purpose OS
§ ORCOS has been designed for use in embedded devices only! § No rich user runtime environment support! § No GUI, no interactive Bash Shell, no runtime tools (compiler a.s.o). Just pure OS interface! § All Tasks + Kernel are loaded onto the device at once!
§ But: reduced functionality leads to smaller footprint and faster execution times! § Both are very important features for highly embedded systems.

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 4
ORCOS Organic Re-Configurable Operating System
Source: RAMMIG, 2009
Commu-nication
RT and Interrupts
HAL
Synchro-nization
Tasks /RT- Scheduling
User API
ORCOS Configuration Base
Architecture

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 5
ORCOS Design Approach
§ ORCOS is a completely Object Oriented Operating System § Most functionality written in C++ § Hardware relevant parts in Assembler or C
§ Object Oriented Structure allows the System to be designed in a natural fashion § Interfaces and Inheritance allow easy adaptation of the system § E.g. Schedulers implement „Scheduler“ Interface and operate on „Schedulable“ Items § Storable Items inherit the „DatebaseItem“ Class
§ ORCOS needs NO external libraries! All functions are implemented in a smaller and faster way inside the ORCOS build tree

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 6
Class Inheritance Overview

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 7
ORCOS Architecture
Hardware
Memory Management Transparent Communication
Migration Scheduling Character / Comm Block
Device Drivers
System Call Manager
Basic File System
Service User Space
Kernel Space
Task Task
Interrupts
System Calls

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 8
Configuration Operating System Components

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 9
ORCOS Configuration System
Application Programmer
Implementation
file
*.cc
SCLConfig.xml
SCL Tool: verify
SCLConfig.hh
Preprocessor : replace Symbols
generate
Compiler
Skeleton Customization Language (SCL)
- XML based Configuration of the Operating System Members
- Verification and Validation by XML Schema File to ensure correctness of selected Configuration Members
- Configuration on Source Code Level by Preprocessor Macros

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 10
Skeleton Customization Language 2.0
Example: Changing the Scheduler to a Real-Time Scheduler
<Skeleton> <Name>SingleCPUDispatcher</Name> <Member> <Name>Scheduler</Name> <Class>scheduler/RateMonotonicThreadScheduler</Class> </Member> </Skeleton>
<Skeleton> <Name>SingleCPUDispatcher</Name> <Member> <Name>Scheduler</Name> <Class>scheduler/RoundRobinThreadScheduler</Class> </Member> </Skeleton>

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 11
Skeleton Customization Language 2.0
<!-- ************************************ Skeleton Board ************************************ --> <Skeleton> <Name>Board</Name> <Superclass>arch/PPC40x/RAPTOR/RaptorBoard</Superclass> <Member> <Name>Timer</Name> <Class>arch/PPC40x/PPC405ProgrammableIntervalTimer</Class> <None>false</None> </Member> <Member> <Name>Clock</Name> <Class>arch/PPC40x/PPC405Clock</Class> <Device>"clock"</Device> </Member> <Member> <Name>Watchdog</Name> <Class>arch/PPC40x/PPC405Watchdog</Class> <Device>"watchdog"</Device> <None>false</None> </Member> <Member> <Name>UART</Name> <Class>arch/PPC40x/RAPTOR/OPB_UART_Lite</Class> <Device>"serial0"</Device> <Address>0x90210000</Address> <Length>(unint4)16</Length> <None>false</None> </Member>

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 12
Skeleton Customization Language
<Skeleton> <Name>SingleCPUDispatcher</Name> <Member> <Name>Scheduler</Name> <Classes> <Class>scheduler/RoundRobinThreadScheduler</Class> <Class>scheduler/PriorityThreadScheduler</Class> <Class>scheduler/RateMonotonicThreadScheduler</Class> <Class>scheduler/EarliestDeadlineFirstThreadScheduler</Class> <Class>scheduler/EarliestDeadlineFirstThreadScheduler_TBS</Class> </Classes> </Member> </Skeleton>
§ SCLDependency.xml file allows the specification of valid classes for each Skeleton § SCL Tool automatically checks the correctness of the configuration § XML Schema File ensures the correctness of the SCL Configuration XML file

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 13
Skeleton Customization Language 2.0

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 14
ORCOS Organic Re-Configurable Operating System
Commu-nication
RT and Interrupts
HAL
Synchro-nisation
Tasks /RT- Scheduling
User API
ORCOS Configuration Base
Architecture

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 15
ORCOS HAL
The Hardware Abstraction Layer (HAL) of ORCOS defines a clean interface for hardware dependent implementations: • Hardware Time (most important and mandatory for Real-Time operation) • Hardware Clock (mandatory but can be simulated) • Hardware Address Translation Layer (HAT) • Device Driver embedded into a basic file system (e.g. „/dev/comm/serial0“ or „/dev/led0“) • Interrupt Handler are directly implemented in Assembler and C

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 16
Hardware Abstraction Layer
Board
Kernel
Timer Interrupt Handler Watchdog Device Drivers
§ ORCOS Kernel uses only abstractions of hardware § Generic Device Driver Architecture
§ ORCOS is easy to port to other architectures
- Main parts are hardware independent

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 17
HAL Layer

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 18
Architecture Dependent Implementations
§ ARM v4
§ Sparc
§ PPC405

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 19
ORCOS Organic Re-Configurable Operating System
Commu-nication
RT and Interrupts
HAL
Synchro-nisation
Tasks /RT- Scheduling
User API
ORCOS Configuration Base
Architecture

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 20
Execution Spaces
§ ORCOS distinguishes strictly between user and kernel space § Threads need to call the kernel by System Calls to perform specific functions
§ System Calls for: § Access to Hardware Devices § Communication § Synchronisation § Memory Management § Scheduling related features
§ System Call Features: § Very fast System Call execution as this
can become a bottle neck § Safe System Calls (no stack sniffing or other attack possibilites)

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 21
ORCOS API
§ ORCOS System Call user Library headers in „lib/orcos.hh“
§ Provides all nessecary operations for embedded applications to run § The ORCOS API is not POSIX conform! However it is very similiar to it! § There is a POSIX intermediate Wrapper Layer (not part of the open source
available version)
§ Example: Memory related system calls trigger the corresponding MemoryManager operation:
void* operator new( size_t s ); extern "C"void* malloc(size_t s); extern "C"void free(void *s); void operator delete( void* ptr );

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 22
ORCOS API Overview int task_stop (int taskid)
Stop the specified task. It could be resumed later on.
int task_resume (int taskid)
resumes the specified task. Resumes execution of a task that is currently not running.
void sleep (int ms)
Sleep method. The calling thread will be blocked for at least 'ms' milliseconds.
int thread_create (int *threadid, thread_attr_t *attr, void *(*start_routine)(void *), void *arg) Create a new thread.
int thread_run (int threadid)
Start the execution of the thread with id 'threadid'.
int thread_self ()
Returns the id of the currently running thread.
void thread_yield ()
Voluntarily yield the cpu to some other thread (if any).
void thread_exit () Terminates the currently executing thread.

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 23
ORCOS Organic Re-Configurable Operating System
Source: RAMMIG, 2009
Commu-nication
RT and Interrupts
HAL
Synchro-nisation
Tasks /RT- Scheduling
User API
ORCOS Configuration Base
Architecture

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 24
ORCOS Tasks
§ ORCOS Real-Time entities are multi-thread capable tasks § Different to other Real-Time Systems as e.g. RTAI
§ ORCOS Threads always run in user mode
§ Tasks are defined statically and initialized by the System at Boot Time § The initial execution entity (Thread) inside a Task is specified by the user at build
time (e.g. Type and Scheduling Parameters) § Upon BootUp each task is created and the initial thread is created
§ Task Heap, Memory Manager and Thread Stack are created § Virtual Memory Address Space is initialized
§ Threads can be created at Run-Time
§ Tasks can not be created at Run-Time (only exception is the addition of a migrated task by the MigrationManager)

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 25
Task Configuration

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 26
Task Control Block
struct RTThreadAttrs { unint4 initialPriority; unint4 phase; unint4 period; unint4 deadline; unint4 executionTime; };
SECTIONS { . = TASK_START; .text TASK_VMA : AT(TASK_START) { LONG(TASK_START); LONG(task_main); LONG(TASK_HEAP); LONG(TASK_END); LONG(TASK_DATA_END); LONG(thread_exit); LONG(INITIAL_PRIORITY); LONG(PHASE); LONG(PERIOD); LONG(DEADLINE); LONG(EXECUTIONTIME); static.o(.text) *(.text) }
typedef struct { long task_start_addr; long task_entry_addr; long task_heap_start; long task_heap_end; long task_data_end; long task_thread_exit_addr; } taskTable;
Part of the Linker Script for an ORCOS Task

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 27
§ Same memory layout for every task - Position and Heap size defined by linker (configured by SCLConfig)
Interrupt Handler
OS .text
Task1
Task2
OS heap
+ stacks
36 KB
3,5 KB
6 KB
> 2 KB
tasktable
.text
memManager Task2
stack thread 1
objects
stack thread 2
2,5 KB
> 1,4 KB
> 1,4 KB
heap
(Example)
ORCOS Memory Layout
maintains

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 28
ORCOS Process States
§ Dispatcher works on two Queues: § Ready Queue § Sleep Queue
§ Scheduler updates the queues according to the scheduler rule
§ ORCOS does not distinguish
between sleeping (sleep(ms)) Threads and Threads waiting for the next Period (this has implementation reasons)

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 29
Writing a periodic Task
#include <orcos.hh> extern "C" int thread_main(int instance) {
// Execution Instance starts here
int led_id = fopen("dev/led0"); fputc(instance, led_id); fclose(led_id); // reaching this point results in calling thread_exit() // Execution Instance ends here
}
ORCOS automatically passes the instance number to the application by the instance function parameter
ORCOS periodic task execution is different to other systems like RTAI: RTAI example: while (true) { … waitForPeriod(); } ORCOS:

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 30
Periodic Task Execution
thread_main(instance)
thread_main(++instance)

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 31
Creating a new Thread at runtime
#include <orcos.hh> void* thread_entry(void* arg) { } extern "C" int thread_main(int instance) {
thread_attr_t attr; attr.deadline = 400000; // deadline in µs attr.period = 400000 ; // period in µs attr.executionTime = 166444; // execution time in µs if known attr.phase = 0; // phase in µs attr.stack_size = 2048; // the stack size for this thread int id; thread_create(&id,&attr,&thread_entry,0); thread_run(id);
}
Creating a new thread is done by using the thread_create system call:
int thread_create (int *threadid, thread_attr_t *attr, void *(*start_routine)(void *), void *arg)

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 32
Scheduling
§ ORCOS supports multiple Scheduler Algorithms
§ Implementing a new Scheduler possible by implementing the getNext() and getNextTimerEvent() Methods.
§ ORCOS does not support online schedulability analysis! Thus schedulabilty must be guaranteed by the system designer!
§ ORCOS only announces missded deadlines!

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 33
Scheduling

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 34
Context Switching Times
ORCOS has a very small Context Switching Overhead. Example Measurements for the PPC405 @ 200MHZ Approx. Cycles to Instructions Ratio : 3 / 1
#Cycles cs
2755 9,183 µSec
622 2,073 µSec
622 2,073 µSec
622 2,073 µSec
Table 1: Context switching times with instruction cache and data cache enabled (32 KB caches each) #Cycles cs
5749 19,08 µSec
4816 16,05 µSec
4908 16,36 µSec
Table 4: Context switching times with instruction cache and data cache enabled (32 KB caches each) using the worst case scenario

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 35
ORCOS Organic Re-Configurable Operating System
Source: RAMMIG, 2009 Source: RAMMIG, 2009
Commu-nication
RT and Interrupts
HAL
Synchro-nisation
Tasks /RT- Scheduling
User API
ORCOS Configuration Base
Architecture

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 36
Communication
§ ORCOS uses the lwIP TCP/IP Stack § Supports:
§ TCP § IPv4 (ICMPv4, ARP) § IPv6 § Currently only usable over Ethernet Devices
§ Serial Communication must be done by the Application Level § e.g.: directly writing to and reading from a serial device
§ Shared Memory Communication § No protocol provided here. Applications must implement their own protocol! § ORCOS only provides the memory mapping features!

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 37
TCP/IP Example
// first get some buffer the socket can work on (storing messages and so on) char* mysocketbuffer = (char*) malloc(500); // create a socket using the buffer created above int mysock = socket(0x800,SOCK_STREAM,6,mysocketbuffer,500); // bind our socket to some address sockaddr* addr = (sockaddr*) malloc(sizeof(sockaddr)); addr->port_data = 4000; //< our port addr->sa_data = IP4_ADDR(192,168,2,1); //< our address bind(mysock,addr); addr->port_data = 4001; //< destination port addr->sa_data = IP4_ADDR(192,168,2,2); //< destination address connect(mysock,addr);

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 38
Socket Syscall
int mysock = socket(0x800,SOCK_STREAM,6,mysocketbuffer,500);
§ Posix like System Call to create a new socket
Domain (0x800 = IPv4)
Connection oriented or Message oriented
Transportprotocol (6 = TCP)
Pointer to a memory region which can be used to store received messages
Size of the buffer

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 39
Commu-nication
RT and Interrupts
HAL
Synchro-nisation
Tasks /RT- Scheduling
User API
ORCOS Configuration Base
Architecture
ORCOS Organic Re-Configurable Operating System

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 40
Resources
ORCOS uses two levels of exclusive access control. Kernel Level Synchronisation: - All Objects derived from „Resource“are proteced by Mutexes. - Must be aquired first to use them! - Aquisition can be blocking if configured. User Level Synchronisation: Signals for synchronisation

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 41
ORCOS Resource Aquisition
§ As Resources are viewed and accessed as Files (UNIX Style) two methods exist for Resource Synchronisation: § int fopen (const char *filename) § int fclose (int fileid)
§ fopen() will call the Resource::aquire() Method which ensures exclusive access to the Resource § Threads who are denied are blocked, PIP will be used if configured
§ fclose() frees the Resource for other Threads
§ fcreate(const char *filename, const char *path) allows creation of new Resources that may be used as Semaphores.
§ User Level synchronization can be done by using: § void signal_wait (void *sig, bool memAddrAsSig=false)
§ Blocks the calling thread until signal_signal is called on the same *sig § void signal_signal (void *sig, bool memAddrAsSig=false)
§ Issues a signal on the *sig object deblocking all threads waiting on it

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 42
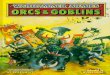
PIP
Problem: Priority Inversion of blocked Threads Solution: Inherit the priority of the higher priority task! Automatically used for Priority enabled Configurations in ORCOS.
J1
J2
J3
J1 blockiert
Priority Inversion
cirtical section
normal execution

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 43
Nested Interrupts
§ ORCOS supports Nested Interrupts § Reduces the Interrupt Latency for e.g. the Timer Interrupt
Syscall Handler
syscall irq timer irq
Timer Handler
Syscall Handler
Timer Handler
syscall irq timer irq

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 44
ORCOS Organic Re-Configurable Operating System
Source: RAMMIG, 2009 Source: RAMMIG, 2009
Commu-nication
RT and Interrupts
HAL
Synchro-nisation
Tasks /RT- Scheduling
User API
ORCOS Configuration Base
Architecture

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 45
RT and Interrupts
§ Straight Forward implementation of Interrupt Handlers typically run directly inside the Interrupt Handling Context
§ Problem: Interrupt Handling for e.g. Communication Devices may prolong the execution of Real-Time tasks § Result: Worst Case Interrupt Handler Execution Time needs to be
calculated into the Execution Time of every Task as Interrupts always have the highest priority!
Example: WCET of Task: 100 ms , Deadline 140ms Device Interrupts: Minimal Inter-Arrival Time: 30 ms, 10 ms Packet Handling
30ms 30ms 30ms 30ms 30ms
150
Interrupt Handler
RT-Task
0 30 60 90 120

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
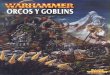
Slide 46
Idea: ORCOS uses Workerthreads - Workerthread activated and scheduled for different jobs:
§ Asynchronous External I/O interrupts § Timed/Periodic Function Calls § Allows all kind of Activities to be scheduled
§ Result: Higher Priority Tasks may only be interrupted once for each lower priority interrupt
Activation of
Workerthread
Interrupt- Handling
By Workerthread IO Interrupt
Thread 3
Thread 2
Highest Priority
Lowest Priority
scheduling Workerthread
Thread 1
ORCOS Workerthreads

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 47
RT and Interrupts
if (!eth->hasAssignedWorkerThread) { if (theOS->getWorkerTask()->addJob( ExternalDeviceJob, // This is a Device Driver Job 0, // Execution Mode ID (void*) eth, // Pointer to the Device WORKERTHREAD_ETH_PRIORITY_PARAM // Priority /
Deadline )) eth->hasAssignedWorkerThread = true;
}
§ Example Workerthread for a Device Driver Interrupt:
§ Communication Device Driver can just be added to the Workertask as it implements a callable CommDeviceDriver Interface

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 48
IRTOS LAB: DigiTrain
IRTOS LAB
An Introduction to the DigiTrain Environment

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 49
IRTOS Railway System Architecture
ORCOS Application
ETHLI100
ORCOS
ETH PHY XnTCP
Lenz LI100
User Mode
Kernel Mode
Hardware Level
10 Mbit ETH Phy
XpressNet Serial Bus (62500 baud/s)

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 50
RAPTOR 2000
• Virtex-II Pro FPGA XC2VP20/30 with embedded PowerPC processor
• 128 MB SDRAM • JTAG Debug Interface • 5x5 LED-matrix
• Quad Ethernet PHY Module DB-Ethernet

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 51
Programming / Debugging Architecture
RS232
USB
Xilinx Interface
JTAG BUS
Linux Host
• Logging Information can be read over the Serial Console
• FPGA programming / loading applications done
using the Xilinx Interface
XMD
Serial Console
115200 bit/s

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 52
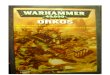
Lenz XpressNet
Source: LENZ ELEKTRONIK GMBH
XpressNet Serial Bus: - 62500 baud/s - arbitration for each
device (for us 3 devices)
- every 10th bit is a non-data stop bit
1 Byte 1-15 Bytes 1 Byte Header Data CRC
XpressNet Bus Message:

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 53
Railway System

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 54
Railway Control System API
API Documentation can be found at: https://orcos.cs.uni-paderborn.de/irtos/html/ ETHLI100 class enables communication with the railway system over the dedicated ethernet line Offers Methods for • setting the train speed (setTrainSpeed()) • controlling the switches (setSwitch(), getSwitch()) • reading block states (getBlockState()) • a.s.o

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 55
Exercises
There will be 4 Lab Sessions for each group. Lab Session will start 2nd week of January! Have a look at the exercises website: http://wwwhni.uni-paderborn.de/eps/lehre/wintersemester-201112/irtos/irtos-exercises/ You will be using ORCOS realtime, communication, scheduling, signalling and resource access features. So read the documentation! Try to solve the exercises at home! Write the program at home and bring them to the Lab Sessions to try out your solution!

© P
rof.
Dr.
rer.
nat.
F. J
. Ram
mig
, Hei
nz N
ixdo
rf In
stitu
te, U
nive
rsity
of P
ader
born
Slide 56
Heinz Nixdorf Institute University of Paderborn Design of Distributed Embedded Systems Fuerstenallee 11 33102 Paderborn Phone: +49 5251 606501 Fax.: +49 5251 606502 E-mail: [email protected] www.hni.uni-paderborn.de/en/eps
Thank you for your attention