Embed Size (px)
Citation preview

Introductory Remarks andDisclaimers
These notes have been compiled from a large number of sources in order to develop a begin-ning course in Ordinary and Partial Differential Equations. This course does not require abackground in Real, Complex or Functional Analysis so the level is taken to be just beyondcalculus, advanced calculus and/or baby reals. This is note intended to be considered as anoriginal text, rather it consists of a compilation of material taken from numerous sourcesincluding course lecture notes of Lawrence Schovanec from Indiana University. In the earlychapters (for ODEs Chapters 1 - 5) we have also followed or borrowed material from [3] and[9] to a large extent. To a lesser extent material has been taken from [4], [5], [6] [7], [8], [2],and [10].
In the Chapters on Partial Differential Equations we have once again taken material froma wide range of sources. One main source is the new edition of G. Folland’s PDE book [14].Material also has been borrowed from [36], [8], [13], [21] and many more.
The first several drafts of these notes were compiled by Lawrence Schovanec. One yearthey were used, and Chapter 3 was somewhat modified, bu Lance Drager. In 1998-1999,David Gilliam continued developing the notes and the results of all these efforts are containedherein. All typographical errors must fall on the Dave Gilliam as the last one to work onthe notes but he will proabably try to blame someone else if possible.
L. Schovanec and D. GilliamMathematics and Statistics
Box 41042Lubbock, TX 79409-1042(806) [email protected]@math.ttu.edu

2

Chapter 1
Some Preliminary Considerations
This chapter will introduce the reader to the terminology and notation of differential equa-tions. Students will also be reminded of some of the elementary solution methods they areassumed to have encountered in an undergraduate course on the subject. At the conclusionof this review one should have an idea of what it means to ‘solve’ a differential equation andsome confidence that they could construct a solution to some simple and special types ofdifferential equations.
1.1 Definitions and Notation
Differential equations are divided into two classes, ordinary and partial. An ordinary dif-ferential equation (ODE) involves one independent variable and derivatives with respect tothat variable. A partial differential equation (PDE) involves more than one independentvariable and corresponding partial derivatives. The first semester of this course is aboutordinary differential equations. The phrase ‘differential equation’ will usually mean ordinarydifferential equation unless the context makes it clear that a partial differential equation isintended. The order of the highest derivative in the differential equation is the order of theequation.
3

4 CHAPTER 1. SOME PRELIMINARY CONSIDERATIONS
Example (1.1.1)
(a) x2 d3y
dx3− 6x
dy
dx+ 10y = 0 3rd order ODE
(b) x′′(t) + sinx(t) = 0 2nd order ODE
(c) y′′ + λy = 0 2nd order ODE
(d) x′ + x = 0 1st order ODE
(e)∂u
∂x− ∂u
∂y= 0 1st order PDE
(f)∂2u
∂t2=∂2u
∂x2+∂2u
∂y22nd order PDE
From the equation it is usually clear which is the independent variable and which isdependent. For example, in (a) it is implied that y = y(x) while in (b) the dependence of xupon t is explicitly noted. In (c) and (d) the choice of the independent variable is arbitrarybut as a matter of choice we will usually regard y = y(x) and x = x(t). The latter notationis usually reserved for the discussion of dynamical systems in which case one should think ofx(t) as denoting the state of a system at time t. In contrast the notation y = y(x) might beused in the context of a boundary value problem when x has the interpretation of a spatialcoordinate. Of course this is much ado about nothing and the student should be preparedto see differential equations written in a variety of ways.
For the partial differential equation in (e) u = u(x, y) while in (f), u = u(x, y, t). We willoften denote partial derivatives by subscripts in which case (e) could be written ux− uy = 0and similarly for (f) utt = uxx + uyy.
Differential equations are divided into two other classes, linear and nonlinear. An nth
order linear differential equation can be put into the form
any(n) + · · ·+ a1y
′ + a0y = b
where b and the coefficients ak depend on at most the independent variable. If b = 0 theequation is said to be homogeneous, otherwise it is called nohomogeneous.
Example (1.1.2)y′′ = y′ + 1 linear, nonhomogeneous
x′ sin t = x linear, homogeneous
(y′)2 = x+ y nonlinear

1.1. DEFINITIONS AND NOTATION 5
General differential equations of order 1 and 2 may be written as
F (x, y, y′) = 0 (1.1.1)
F (x, y, y′, y′′) = 0
with the obvious notation for higher order equations. Such equations are often assumed tobe solvable for the highest derivative and then written as
y′ = f(x, y) (1.1.2)
y′′ = f(x, y, y′).
A differentiable function y = φ(x) is a solution of (1.1.1) on an interval J if F (x, φ(x), φ′(x)) =0, x ∈ J. Usually a first order equation has a family of solutions y = φ(x, c) depending ona single parameter c. A second order equation usually has a two-parameter family of solu-tions y = ϕ(x, c1, c2) and so on. These parameters are like constants of integration and maybe determined by specifying initial conditions corresponding to some ‘time’ when a processstarts.
Example (1.1.3) A two-parameter family of solutions of x′′ = 6 is
x = 3t2 + c1t+ c2 (1.1.3)
The solution that satisfies the initial conditions
x(0) = 1, x′(0) = −1
is
x = 3t2 − t+ 1.
Because solutions may involve one or more integrations, the graph of a solution is calledan integral curve. The integral curves in the previous example are parabolas. A familyof functions is a complete solution of a differential equation if every member of the familysatisfies the differential equation and every solution of the differential equation is a memberof the family. The family of functions given by (1.1.3) is the complete solution of y′′ = 6.
For the student who is familiar with the terminology of a general solution we should stateat this point that the notion of a general solution will only be used in the context of linearequations. The appropriate definitions will be introduced in Chapter 3 at which time thedistinction between a general and complete solution will be made clear.

6 CHAPTER 1. SOME PRELIMINARY CONSIDERATIONS
Example (1.1.4) The family
y = ϕ(x, c) =1√
2x+ c
solves y′ + y3 = 0. The family is not complete since the trivial solution, y(x) = 0 (alsodenoted y ≡ 0), cannot be obtained for any value of c.
In equation (1.1.2) the left hand member dy/dx denotes the slope of a solution curvewhereas the right hand member f(x, y) gives the value of the slope at (x, y). From thispoint of view the solution of an ordinary differential equations is a curve that flows alongdirections specified by f(x, y). The use of dy/dx breaks down when the tangent is verticalbut the geometric interpretation remains meaningful. To deal with this matter note that asmooth curve in the (x, y) plane may be described locally by y = ϕ(x) or x = ψ(y). If dy/dxis meaningless, dx/dy may be permissible. Consequently, it may be advantageous to treatx or y as independent or dependent variables in formulating a differential equation. Theseremarks motivate the following discussion.
A differential equation is said to be in differential form if it is written as
M(x, y)dx+N(x, y)dy = 0. (1.1.4)
A differentiable function y = φ(x) is a solution of (1.1.4) on an interval if the substitutions
y = φ(x), dy = φ′(x)dx
make (1.1.4) true. A differentiable function x = ψ(y) is a solution if the substitutions
x = ψ(y), dx = ψ′(y)dy
make (1.1.4) true. An equation
G(x, y) = c, c constant (1.1.5)
is said to furnish an implicit solution of (1.1.2) if (1.1.5) can be solved for y = φ(x) orx = ψ(y) in a neighborhood of a point (x, y) satisfying (1.1.5) and φ or ψ is a solution in thesense defined above. When (1.1.5) furnishes an implicit solution the graph of this equationis also called an integral curve.
There is some ambiguity as to what one is expected to produce when asked to solvea differential equation. Often the differential equation is regarded as solved when one hasderived an equation such as (1.1.5). However, the context of the problem may make it clearthat one needs to produce an explicit formula for the solution, say y = φ(x) or x = ψ(y).The next two examples will expound upon this issue, but in general the specific problem athand will usually dictate as to what is meant by the phrase, ‘solution’.

1.1. DEFINITIONS AND NOTATION 7
Example (1.1.5) Consider the equation in differential form
xdx+ ydy = 0.
This equation is easily solved by writing it as a ‘pure derivative’, i.e.,
1
2d(x2 + y2) = 0.
When written in this form it is apparent that possible implicit solutions are
x2 + y2 = C. (1.1.6)
If C < 0, the locus is empty. If C = 0 the locus consists of the point (0,0). This case doesnot correspond to a solution since it does not describe a differentiable curve of the formy = ϕ(x) or x = ψ(y). If C > 0, the integral curves are circles centered at the origin.
Example (1.1.6) Consider the three equations
(a)dy
dx= −x
y(b)
dx
dy= −y
x(c) xdx+ ydy = 0.
(a) This form of the equation implicitly requires a solution y = φ(x) and no integralcurve can contain a point (x, y) where y = 0.
(b) This requires a solution y = ϕ(x) and no integral curve can contain a point (x, y)where x = 0.
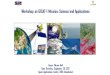
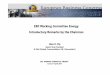
(c) This equation allows for solutions of the form x = ψ(y), or y = ϕ(x) and leads to thefamily of circles (1.1.6) obtained in the previous example. In particular, in the neighborhoodof any point (x, y) on the circle we can express y as a differentiable function of x or vice versa.One could obtain from (1.1.6) additional functions y = ϕ(x) by taking y > 0 on part of thecircle and y < 0 on the remainder (as in (c) below). Such a function is not differentiable andhence not a solution.
(a) (b) (c)y=φ(x) x=ψ(y) y=χ(x)
Fig. 1.1.1. Solutions defined by an integral curve are displayed in (a) and (b). Though thegraph of χ(x) lies on an integral curve, it is not a solution of the differential equation.

8 CHAPTER 1. SOME PRELIMINARY CONSIDERATIONS
Having introduced the notion of a solution and integral curve, we now will review someof the most elementary methods for solving ordinary differential equations.
1.2 Examples of Explicit Solution Techniques
(a) Separable Equations.A differential equation is separable if it can be wrtitten in the form
F (x, y, y′) =dy
dx− f(x)/g(y) = 0.
The differential equation is solved by ‘separating’ the variables and performing theintegrations ∫
g(y)dy =
∫f(x)dx.
Example (1.2.1) Solve
dy/dx = y2/x, x 6= 0.
We separate the variables and integrate to obtain∫1
y2dy =
∫1
xdx
or
y = − 1
ln |x|+ C(1.2.1)
In the above calculation division by y2 assumed y 6= 0. The function y = 0 is also asolution, referred to as a singular solution. Therefore, the family given in (1.2.1) is notcomplete.
(b) Homogeneous Equations.A differential equation is homogeneous if it can put in the form
F (x, y, y′) = y′ − f(y/x) = 0.
In this case let z = y/x sody
dx= z +
dz
dx= f(z)
ordz
dx=f(z)− z
x,
which is separable.

1.2. EXAMPLES OF EXPLICIT SOLUTION TECHNIQUES 9
(c) Exact Equations.The differential equation F (x, y, y′) = 0 is exact if it can be written in differential form
M(x, y)dx+N(x, y)dy = 0
where∂M
∂y=∂N
∂x.
Recall that if M,N are C1 on a simply connected domain then there exists a functionP such that
∂P
∂x= M,
∂P
∂y= N.
Thus the exact differential equation may be written as a pure derivative
dP = Mdx+Ndy = 0
and hence implicit solutions may be obtained from
P (x, y) = C.
Example (1.2.2) Solve
(3x2 + y3ey)dx+ (3xy2ey + xy3ey + 3y2)dy = 0
HereMy = 3y2ey + y3ey = Nx.
Thus there exists P such that
∂P
∂x= M,
∂P
∂y= N.
It is simplest to obtain P from
P =
∫Pxdx = x3 + xy3ey + h(y).
Differentiate with respect to y to obtain
∂P
∂y= 3xy2ey + xy3ey + h′(y) = N
and so h′(y) = 3y2 or h(y) = y3. Thus
P (x, y) = x3 + y3eyx+ y3
and sox3 + y3eyx+ y3 = C
provides an implicit solution.

10 CHAPTER 1. SOME PRELIMINARY CONSIDERATIONS
(d) Integrating Factors.Given
M(x, y)dx+N(x, y)dy = 0,
µ = µ(x, y) is called an integrating factor if
∂
∂y(µM) =
∂
∂x(µN)
The point of this definition is that if µ is an integrating factor, µMdx + µNdy = 0 isan exact differential equation.
Here are three suggestions for finding integrating factors:
1) Try to determine m,n so that µ = xmyn is an integrating factor.
2) IfMy −Nx
N= Q(x),
then
µ(x) = exp
[∫Q(x)dx
]is an integrating factor.
3) IfNx −My
M= R(y),
then
µ(y) = exp
[∫R(y)dy
]is an integrating factor.
(e) First Order Linear Equations.The general form of a first order linear equation is
a1(x)y′ + a0(x) = b(x)
We assume p =a0
a1
, f =b
a1
are continuous on some interval and rewrite the equation
as
y′(x) + p(x)y(x) = f(x). (1.2.2)
By inspection we see thatµ = e
∫p(x)dx

1.2. EXAMPLES OF EXPLICIT SOLUTION TECHNIQUES 11
is an integrating factor for the homogeneous equation. From (1.2.2) we obtain
d
dx(e∫p(x)dxy) = f(x)e
∫p(x)dx
and so
y(x) = e−∫p(x)dx
(∫f(x)e
∫p(x)dxdx+ c
).
Example (1.2.3) Find all solutions of
xy′ − y = x2.
If x 6= 0, rewrite the equation as
y′ − 1
xy = x (1.2.3)
and so
µ = e−∫
(1/x)dx =1
|x| .
If x > 0,d
dx
(yx
)= 1
and so y = x2 + Cx. If x < 0,d
dx
(−1
xy
)= −1
and y = x2 + Cx. Hence y = x2 + Cx gives a differentiable solution valid for all x.
Now consider the initial value problem
xy′ − y = x2
y(0) = y0.
If y0 = 0, we see that there are infinitely many solutions of this problem whereas ify0 6= 0, there are no solutions. The problem in this latter case arises from the fact thatwhen the equation is put in the form of (1.2.3) the coefficient p(x) is not continuous atx = 0. The significance of this observation will be elaborated upon in the next chapter.

12 CHAPTER 1. SOME PRELIMINARY CONSIDERATIONS
(e) Reduction in Order.If in the differential equation the independent variable is missing, that is, the equationis of the form
F (y, y′, · · · , y(n)) = 0, (1.2.4)
set
v = y′ =dy
dx,
y′′ =d
dx(y′) =
dv
dx=dv
dy
dy
dx=dv
dyv,
y′′′ =d
dx(dv
dyv) =
dv
dy
dv
dx+ v
d
dy(dv
dy)dy
dx
= v(dv
dy)2 + v2d
2v
dy2,
etc.
These calculations show that with this change of variables we obtain a differential equa-tion of one less order with y regarded as the independent variable, i.e., the differentialequation (1.3.1) becomes
G(y, v, v′, · · · v(n−1)) = 0.
If the dependent variable is missing, i.e.,
F (x, y′, y′′, · · · y(n) = 0,
again set v =dy
dx= y′ to obtain
G(x, v, v′′, · · · v(n−1)) = 0.
(f) Linear Constant Coefficient Equations.A homogeneous linear differential equation with constant real coefficients of order nhas the form
y(n) + an−1y(n−1) + · · ·+ a0y = 0.
We introduce the notation D =d
dxand write the above equation as
P (D)y ≡(Dn + an−1D
(n−1) + · · ·+ a0
)y = 0.

1.2. EXAMPLES OF EXPLICIT SOLUTION TECHNIQUES 13
By the fundamental theorem of algebra we can write
P (D) = (D−r1)m1 · · · (D−rk)mk (D2−2α1D+α21 +β2
1)p1 · · · (D2−2α`D+α2` +β2
` )p` ,
wherek∑j=1
mj + 2∑j=1
pj = n.
Lemma 1.2.1. The general solution of (D − r)ky = 0 is
y =(c1 + c2x+ · · ·+ ckx
(k−1))erx
and the general solution of (D2 − 2αD + α2 + β2)ky = 0 is
y =(c1 + c2x+ · · ·+ ckx
(k−1))eαx cos(βx) +
(d1 + d2x+ · · ·+ dkx
(k−1))eαx sin(βx).
Proof. Note first that (D − r)erx = D(erx)− rerx = rerx − rerx = 0 and for k > j
(D − r)(xjerx
)= D
(xjerx
)− r
(xjerx
)= jxj−1erx.
Thus we have
(D − r)k(xjerx
)= (D − r)k−1
[(D − r)
(xjerx
) ]= j(D − r)k−1
(xj−1erx
)= · · · =
= j! (D − r)k−j (erx) .
Therefore, each function xjerx, for j = 0, 1, · · · , (k − 1), is a solution of the equationand by the fundamental theory of algebra these functions are linearly independent, i.e.,
0 =k∑j=1
cjxj−1erx = erx
k∑j=1
cjxj−1, for all x
implies c1 = c2 = · · · = ck = 0.
Note that each factor (D2−2αD+α2 +β2) corresponds to a pair of complex conjugateroots r = α ± iβ. In the above calculations we did not assume that r is real so thatfor a pair of complex roots we must have solutions
e(α±iβ)x = eiβxeαx = eαx (cos(βx) + i sin(βx)) ,

14 CHAPTER 1. SOME PRELIMINARY CONSIDERATIONS
and any linear combination of these functions will also be a solution. In particular thereal and imaginary parts must be solutions since
1
2[eαx (cos(βx) + i sin(βx))] +
1
2[eαx (cos(βx)− i sin(βx))] = eαx cos(βx)
1
2i[eαx (cos(βx) + i sin(βx))]− 1
2i[eαx (cos(βx)− i sin(βx))] = eαx sin(βx)
Combining the above results we find that the functions
y =(c1 + c2x+ · · ·+ cnx
(n−1))eαx cos(βx)
andy =
(d1 + d2x+ · · ·+ dnx
(n−1))eαx sin(βx).
are solutions and, as will be shown in Chapter 3, these solutions are linearly indepen-dent.
The general solution of P (D)y = 0 is given as a linear combination of the solutions foreach real root and each pair of complex roots.
Let us consider an example which is already written in factored form[(D + 1)3(D2 + 4D + 13)
]y = 0
The term (D + 1)3 gives a part of the solution as
(c1 + c+ 2x+ c3x2)e−x
and the term (D2 + 4D + 13) corresponds to complex roots with α = −2 and β = 3giving the part of the solution
c4e−2x cos(3x) + c5e
−2x sin(3x).
The general solution is
y = (c1 + c+ 2x+ c3x2)e−x + c4e
−2x cos(3x) + c5e−2x sin(3x).
(g) Equations of Euler (and Cauchy) Type.A differential equation is of Euler type if
F (x, y′, y′′, · · · , y(n)) = F (y, xy′, · · ·xny(n)) = 0.

1.2. EXAMPLES OF EXPLICIT SOLUTION TECHNIQUES 15
Set x = et so that
y =dy
dt=dy
dx
dx
dt= y′x,
d2y
dt2− dy
dt=
d
dt(y′x)− y′x =
dy′
dx
dx
dtx+ y′x− y′x = y′′x2,
etc.
In this way the differential equation can be put into the form
G(y, y, · · · , y(n)) = 0
and now the method of reduction may be applied.
An important special case of this type of equation is the so-called Cauchy’s equation ,
xny(n) + · · ·+ a1xy′ + a0y = 0,
or
P (D)y ≡(xnDn + an−1x
n−1D(n−1) + · · ·+ a0
)y = 0.
With x = et and D ≡ dy
dtwe have
Dy =dy
dx=dy
dt
dt
dx=
1
x
dy
dt⇒ xDy = Dy,
D2y =d
dx
(1
x
dy
dt
)=
1
x2
(d2y
dt2− dy
dt
)⇒ x2D2y = D(D− 1)y,
...
xrDry = D(D− 1)(D− 2) · · · (D− r + 1)y.
Thus we can write
P (D)y = P (D)y =
[D(D− 1) · · · (D− n+ 1)
+ an−1
(D(D− 1) · · · (D− n+ 2)
)+ · · ·+ a1D + a0
]y = 0.
The second order case
ax2y′′ + bxy′ + cy = 0. (1.2.5)

16 CHAPTER 1. SOME PRELIMINARY CONSIDERATIONS
will arise numerous times throughout the course. We assume the coefficients are con-stant and x > 0 and as an alternative to the above approach we seek a solution in theform y = xr. In this way one obtains the following quadratic for the exponent r,
ar2 + (b− a)r + c = 0. (1.2.6)
There are three cases to be considered:1) If (1.2.6) has distinct real roots r1, r2 then we obtain solutions
xr1 , xr2 .
2) If r1 = α + iβ, r2 = α− iβ then solutions may be written as
xα+iβ = xαeiβ lnx = xα(cos(β lnx) + i sin(β lnx))
and similarlyxα−iβ = xα(cos(β lnx)− i sin(β lnx)).
Observe that a linear combination of solutions of (1.3.2) is again a solution and so weobtain the solutions
1
2(xα+iβ + xα−iβ) = xα cos(β lnx)
and1
2i(xα+iβ − xα−iβ) = xα sin(β lnx).
3) If (1.2.6) has repeated roots then (b− a)2 = 4ac and
r1 = (a− b)/2a.
We seek a second solution asy = v(x)xr1
and observe that v must satisfy
axv′′ + av′ = 0.
Set w = v′ to getxw′ + w = 0
and sow = c1/x,
andv = c1 lnx+ c2.

1.2. EXAMPLES OF EXPLICIT SOLUTION TECHNIQUES 17
Thus in the case of repeated roots we obtain the solutions
xr1 lnx, xr1 .
One might try to verify that c1xr1+c2x
r2 , xα(c1 cos(β lnx)+c2 sin(β lnx)), and c1xr1 lnx+
c2xr1 are complete families of solutions of Euler’s equation in each of the three cases
respectively. That this is indeed the case will be a trivial consequence of a more generalresult for linear equations that we will prove in Chapter 3.
(h) Equations of Legendre Type.
A slightly more general class of equations than the Cauchy equations is the Legendreequations which have the form
P (D)y ≡((ax+ b)nDn + an−1(ax+ b)n−1D(n−1) + · · ·+ a1(ax+ b)D + a0
)y = 0.
These equations, just as Cauchy equations, can be reduced to linear constant coefficientequations. For these equations we use the substitution (ax + b) = et which, using thechain rule just as above, gives:
Dy =dy
dx=dy
dt
dt
dx=
a
(ax+ b)
dy
dt⇒ (ax+ b)Dy = aDy,
(ax+ b)2D2y = a2D(D− 1)y,
...
(ax+ b)rDry = arD(D− 1)(D− 2) · · · (D− r + 1)y.
Thus we can write
P (D)y = P (D)y =
[anD(D− 1) · · · (D− n+ 1)
+ an−1an−1
(D(D− 1) · · · (D− n+ 2)
)+ · · ·+ aa1D + a0
]y = 0.
As an example consider the equation[(x+ 2)2D2 − (x+ 2)D + 1
]y = 0
Set (x+ 2) = et; then the equation can be written as{D(D− 1)−D + 1
}y = 0

18 CHAPTER 1. SOME PRELIMINARY CONSIDERATIONS
or {D2 − 2D + 1
}y = (D− 1)2y = 0.
The general solution to this problem is
y(t) = C1et + C2te
t
and we can readily change back to the x variable using t = ln(x+ 2) to obtain
y = (x+ 2)[C1 + C2 ln(x+ 2)
].
(i) Equations of Bernoulli Type.A Bernoulli equation is a differential equation of the form
y′ + p(x)y = q(x)yn.
I can be shown that the substitution v = y1−n changes the Bernoulli equation into thelinear differential equation
v′(x) + (1− n)p(x)v = (1− n)q(x).
The special cases n = 0, n = 1 should be considered separately.
As an example consider the differential equation
y′ + y = ya+1
where a is a nonzero constant. This equation is separable so we can separate variablesto obtain an implicit solution or we can use Bernoulli’s procedure to derive the explicitsolution
y = (1 + ceax)−1/a.
The student should check that both results give this solution.
(j) Equations of Clairaut Type.
An equation in the formy = xy′ + f(y′)
for any function f is called a Clairaut equation. While, at first glance, it would appearthat such equation could be rather complicated, it turns out that this is not the case.As can be readily verified, the general solution is given by
y = Cx+ f(C)

1.2. EXAMPLES OF EXPLICIT SOLUTION TECHNIQUES 19
where C is a constant.
As an example the equation
y = xy′ +√
4 + (y′)2
has solution y = Cx+√
4 + C2.
Sometimes one can transform an equation into Clairaut form. For example, considerthe equation
y = 2xy′ + 6y2(y′)2.
If we multiply the equation by y2 we get
y3 = 3xy2y′ + 6y4(y′)2.
Now use the transformation v = y3, which implies v′ = 3y2y′, to write the equation as
v = xv′ +2
3(v′)2
whose solution is v = Cx+ 23C2 which gives y3 = Cx+ 2
3C2.
(k) Other First Order and Higher Degree Equations.A first order differential equation may have higher degree. Often an equation is givenin polynomial form in the variable y′ and in this case we refer to the equation as havingorder n if n is the highest order power of y′ that occurs in the equation. If we writep = y′ for notational convienence, then such an equation can be written as
pn + gn−1(x, y)pn−1 + · · ·+ g1(x, y)p+ g0(x, y) = 0. (1.2.7)
It may be possible to solve such equations using one of the following methods (see [2]).
Equation Solvable for p:It may happen that (1.2.7) can be factored into
(p− F1)(p− F2) · · · (p− Fn) = 0
in which case we can solve the resulting first order and first degree equations
y′ = F1(x, y), y′ = F2(x, y), · · · , y′ = Fn(x, y).
This will lead to solutions
f1(x, y, c) = 0, f2(x, y, c) = 0, · · · , fn(x, y, c) = 0

20 CHAPTER 1. SOME PRELIMINARY CONSIDERATIONS
and the general solution is the product of the solutions since the factored equation canbe rewritten in any form (i.e., the ordering of the terms does not matter). Thus wehave
f1(x, y, c)f2(x, y, c) · · · fn(x, y, c) = 0.
For example,p4 − (x+ 2y + 1)p3 + (x+ 2y + 2xy)p2 − 2xyp = 0
can be factored intop(p− 1)(p− x)(p− 2y) = 0
resulting in the equations
y′ = 0, y′ = 1, y′ = x, y′ = 2y.
These equations yield the solutions
y − c = 0, y − x− c = 0, 2y − x2 − c = 0, y − ce2x = 0
giving the solution
(y − c)(y − x− c)(2y − x2 − c)(y − ce2x) = 0.
Equation Solvable for y:In this case we can write the equation G(x, y, y′) = 0 in the form y = f(x, p). In thiscase differentiate this equation with respect to x to obtain,
p =dy
dx= fx + fp
dp
dx= F (x, p,
dp
dx).
This is an equation for p which is first order and first degree. Solving this equation toobtain φ(x, p, c) = 0 we then use the original equation y = f(x, p) to try to eliminatethe p dependence and obtain Φ(x, y, c) = 0.
Consider the example y = 2px+ p4x2. We differentiate with respect to x to obtain
p = 2xdp
dx+ 2p+ 2p4x+ 4p3x2 dp
dx
which can be rewritten as (p+ 2x
dp
dx
)(1− 2p3x) = 0.

1.2. EXAMPLES OF EXPLICIT SOLUTION TECHNIQUES 21
An analysis of singular solutions shows that we can discard the factor (1− 2p3x) and
we have (p + 2xdp
dx) = 0 which implies xp2 = c. If we write the original equation as
(y − p4x2) = 2px and square both sides we have (y − p4x2)2 = 4p2x2. With this andxp2 = c we can eliminate p to obtain (y − c2)2 = 4cx.
Equation Solvable for x:In this case an equation G(x, y, y′) = 0 can be written as x = f(y, p). We proceed bydifferentiating with respect to y to obtain
1
p=dx
dy= fy + fp
dp
dy= F (y, p,
dp
dy)
which is first order and first degree indp
dy. Solving this equation to obtain φ(x, y, c) = 0
we then use the original equation y = f(x, p) to try to eliminate the p dependence andobtain Φ(x, y, c) = 0.
As an example consider p3 − 2xyp + 4y2 = 0 which we can write as 2x =p2
y+
4y
p.
Differentiating with respect to y gives
2
p=
2p
y
dp
dy− p2
y2+ 4
(1
p− y
p2
dp
dy
)or (
p− 2ydp
dy
)(2y2 − p3) = 0.
The term (2y2 − p3) gives rise to singular solutions and we consider only(p− 2y
dp
dy
)= 0
which has solution p2 = cy. We now use this relation and the original equation toeliminate p. First we have
2x− c =4y
p
which implies
(2x− c)2 = 16yy
p2=
16y
c
and finally 16y = c(2x− c)2.

22 CHAPTER 1. SOME PRELIMINARY CONSIDERATIONS
Exercises for Chapter 1
1. Solve the differential equations.
(a) y′ + 2xy + xy4 = 0
(b) y′ =y
x+ sin
y − xx
(c) (2x3y2 + 4x2y + 2xy2 + xy4 + 2y)dx+ 2(y3 + x2y + x)dy = 0
(d) (y − y′x)2 = 1 + (y′)2
(e) x2yy′′ + x2(y′)2 − 5xyy′ + 4y2 = 0
(f) y′ = (−5x+ y)2 − 4
(g) xydx+ (x2 + y2)dy = 0
(h) y =y′x
2− 8
(x
y′
)2
(i) x =y
3y′− 2y′y2
(j) (y′)4 − (x+ 2y + 1)(y′)3 + (x+ 2y + 2xy)(y′)2 − 2xyy′ = 0
2. Solve 1 + yy′′ + (y′)2 = 0.
3. If y′ = ky + f(x), k constant and f(x+ w) = f(x), show the differential equation hasa solution with period w.
4. Suppose f ∈ C[a, b], g ∈ C1[a, b], g(a) = 0, λ 6= 0. Show that if
|g(x)f(x) + λg′(x)| ≤ |g(x)|, x ∈ [a, b]
then g = 0.
5. Consider a differential equation M(x, y) dx+N(x, y) dy = 0 and assume that there isan integer n so that M(λx, λy) = λnM(x, y), N(λx, λy) = λnN(x, y) (i.e., the equationis homogeneous).
Then show that µ = (xM + yN)−1 is an integrating factor provided that (xM + yN)is not identically zero. Also, investigate the case in which (xM + yN) ≡ 0.
6. Solve the equations
(a) (x4 + y4) dx− xy3 dy = 0
(b) y2 dx+ (x2 − xy − y2) dy = 0

Bibliography
[1] V.I. Arnol’d, “Ordinary differential equations,” Springer-textbook, Springer-Verlag,1992.
[2] “Differential Equations,” Frank Ayres, jr., Schaum’s Outline Series, Schaum Publishing,New York, 1952.
[3] F. Brauer, J.A. Nohel, Qualitative Theory of Ordinary Differential Equtions, Dover,1969.
[4] E.A. Coddington and N. Levinson, “Theory of Ordinary Differential Equations,”McGraw-Hill Book Co. New York, Toronto, London (1955).
[5] E.A. Coddington, “An introduction to ordinary differential equations,” Dover 1989.
[6] J. Hale and H. Hocak, “Dynamics and birfurcation,” Springer-Verlag 1991.
[7] G.F. Simmons, “Differential Equations with applications and historical notes,”McGraw-Hill Book Co. New York, Toronto, London (1972).
[8] H. Sagan, “Boundary and Eigenvalue Problems in Mathematical Physics,” J. Wiley &Sons, Inc, New York, 1961.
[9] D.A. Sanchez, Ordinay Differential Equations and Stability Theory: An Introduction,W.H. Freeman and Company, 1968.
[10] I. Stakgold, “Green’s Functions and Boundary Value Problems,” Wiley-Interscience,1979.
[11] R. Dautray and J.L. Lions, Mathematical analysis and numerical methods for scienceand technology,
[12] J. Dieudonne, Foundations of Modern Analysis, Academic press, 1960.
[13] S. J. Farlow, “Partial differential equations for scientists and engineers, Dover 1993.
23

24 BIBLIOGRAPHY
[14] G. Folland, Introduction to partial differential equations,
[15] G. Folland, Fourier Series and its Applications, Brooks-Cole Publ. Co., 1992.
[16] G. Folland, Real Analysis, Wiley-Interscience Mathematics, 1984.
[17] A. Friedman, Partial differential equations,
[18] P.R. Garabedian, Partial Differential Equations, New York, John Wiley & Sons, 1964.
[19] I.M. Gel’fand and G.E. Shilov, Generalized functions, v. 1,
[20] K.E. Gustafson Partial differential equations,
[21] R.B. Guenther and J.W. Lee, Partial Differential Equations of Mathematical Physicsand Integral Equations, (Prentice Hall 1988), (Dover 1996).
[22] G. Hellwig, Partial differential equations, New York, Blaisdell Publ. Co. 1964.
[23] L. Hormander, Linear partial differential operators,
[24] F. John, Partial differential equations,
[25] J. Kevorkian, Partial differential equations,
[26] P. Lax, Hyperbolic systems of conservation laws and the mathematical theory of shocks,
[27] I.G. Petrovsky, Lectures on partial differential equations, Philadelphia, W.B. SaundersCo. 1967.
[28] M. Pinsky, Introduction to partial differential equations with applications,
[29] W. Rudin, Functional analysis, McGraw-Hill, New york, 1973.
[30] W. Rudin, Real and Complex Analysis, 2nd edition, McGraw-Hill, New york, 1974.
[31] F. Treves, Basic Partial Differential Equations, New York, Academic Press, 1975.
[32] F. Treves, Linear Partial Differential Equations with Constant Coefficients, New York,Gordon & Breach, 1966.
[33] K. Yosida, Functional analysis,
[34] Generalized functions in mathematical physics, V.S. Vladimirov
[35] H.F. Weinberger, Partial differential equations, Waltham, Mass., Blaisdel Publ. Co.,1965.

BIBLIOGRAPHY 25
[36] E.C. Zachmanoglou and D.W. Thoe, Introduction to partial differential equations withapplications,