Embed Size (px)
Citation preview

! "!
The Naming of Robots: biomorphism, gender and identity Andra Keay, Masters Candidate in Digital Cultures at University of Sydney !Abstract Would a robot by any other name seem the same? Naming a robot categorizes it, creates expectations and triggers social responses. An analysis of robot naming practices in research robot competitions shows a widespread convention of naming with more than 2/3rds of all robots reflecting biomorphic or lifelike non-mechanistic attributes. This will evoke ‘mindless’ or ethopoeic social responses. Preliminary findings are that robot naming in different competitions either replicates human gender stereotypes or is evidence of prosthesis (or projection), the extension of self into the robot. Even robot names that avoid anthropomorphism, gender or animism are subject to version control strategies, highlighting the difficulties that we face with regard to robot identity.
KEYWORDS: Human-Robot Interaction, Anthropomorphism, Biomorphism, Naming, Identity. Introduction A name is a fundamental classifier, which also indicates attributes of personality and gender. As the number of robots in society increases, robots are increasingly being named and this is occurring outside of the cultural fields in which the name is purposefully selected. My research analyses the naming of robots in research competitions, exploring areas of implicit biases and social responses that illustrate the production of identity, gender and function in robot design. I am conducting an audit of the names of robots in competitions and at this stage have more than 1200 records, which provide the data for a preliminary analysis.
The first preliminary finding from the ‘naming of robots’ project is that naming is widespread and that once naming occurs within a community it rapidly becomes a social convention. The second finding is that there appears to be a functional gender bias in robot naming. 26% of social agent robots are female
compared to 8% of vehicle robots. The third finding is that the 30% of robots have male names in both of the categories examined so far, chatbots and autonomous vehicles. In conjunction with the high level of biomorphic naming of vehicles (67%), the predominance of male names supports the theory that non-humanoid robots are likely to be seen as prosthetics or extensions of self rather than social agents. There appears to be a higher level of prosthetic identity in social agent robots than expected, with only 26% of robots having female names. The fourth finding is that both categories of robots examined show a range of version control tactics, which highlight the uncertainty about what constitutes a robot.
A variety of social science studies have shown that objects can invoke social responses and that very little stimuli is required to trigger ingrained scripts in respondents of all levels of expertise (Reeves & Nass 1996, Nass & Moon 2000, Kiesler et al. 2004 2005, Paepcke & Takayama 2010). A culture of naming robots has broader implications for human-robot interaction than the obvious issue of gender bias in robotics and engineering.
Context: the emergence of robot competitions Computing power increases in the past three decades means that mobile and social robots are now possible. Robots today range from robotic arms and automated vehicles, through animistic or biomorphic devices, to humanoids. The ISO 8373 (1994) standard definition of a robot is so broad that microwave ovens and coffee makers can be considered robots (Schultz 2010). While the definition of a robot can stretch from something that replaces humans to something that looks human, for research purposes the definition is something both situated and embodied (Moravec 2009). A situated device senses and is responsive to its environment. An embodied device has some way of acting in the world. A GPS is situated but not embodied. A coffee maker is embodied but not situated. As roboticist Rodney Brooks defines it, a robot ‘senses the world in some way, does some sort of computation, decides what to do, and then acts on the world outside itself as a result.’ (Brooks 2002)
In spite of the increasing focus in robotics on embodiment and autonomy, robots in research competitions range from disembodied social agents, AI and chatbots, to embodied remotely operated robots, vehicles and machines. This range is valuable for research purposes, enabling the development of more sophisticated systems. This study will analyse

! #!
data from major university level robotics competitions as being representative of leading practices in robotics research and education.
Participant observation of robotics competitions and research labs indicates that researchers generally do name robots, which may reflect anthropomorphism, playfulness, or simply an efficient means to distinguish between robots and communicate about them to others. However, this choice extends beyond practicality. It is well recognised that a name is the primary element in constructing identity and that naming practices reflect gender (Giddens 1991, Levitt & Dubner 2005), which is a fundamental category of society (Bowker & Starr 2004).
This study draws on research that demonstrates the human tendency to attribute human qualities to technological devices (Reeves & Nass 1996, Turkle 1996, Norman 2004) and nonhuman organisms (Haraway 1989 1991 1997 2008, Suchman 2007 2010). Some studies explore anthropomorphism of humanoid and nonhumanoid robots from a consumer or enduser perspective (Kiesler et al. 2002 2004, Bartneck et al. 2004 2008, Turkle 2006, Alac 2009, Suchman 2010). Some studies examine the impact of the gender of the consumer/user on perception of robots in general (Kiesler et al. 2002 2004, Lee et al. 2005, Goetz et al. 2003, Libin & Libin 2004). Many studies also examine the impact of the constructed gender of a social or humanoid robot and perceived success and function, in an educational, health or social setting. Recent research in human-robot interaction (HRI) considers the prosthetic nature of robotics where ‘the distinction between the hand and the tool blurs’ (Heidegger 1977, Nass & Moon 2000:5, Groom et al 2009, Paepcke & Takayama 2010).
This study also draws on the extensive literature of gender, identity and technology studies in the fields of Cultural or Science and Technology Studies which have examined the impact of gender on the role of the researcher, research subject and research environment (Mackenzie & Wajcman 1999, Keller 1985 2002, Latour 1988, Rouse 1992, Cockburn 1999ab, Haraway 1989 1991 1997 2008, Barad 2007). Correlations between gendered robots and their function or success within the social context or with the researcher’s gender may contribute to understandings of the production of gender relations if robots stand in for humans as model (in)organisms (Suchman inpres). Haraway describes this process as to ‘ferret out how relations and practices get mistaken for non-tropic things-in-themselves in ways that matter to the chances for liveliness of [both] humans and nonhumans’ (1997:141, Suchman inpres)
Numbers of names The ‘naming of robots’ project was partially inspired by the California birth registry audit by Levitt & Dubner (2005), which used public data to develop a deep analysis of the correlation between name and class, race, gender, education and life outcome. Levitt & Dubner’s large scale quantitative analysis using data that reaches back over decades supports the effectiveness of auditing public data as a research methodology, which can be applied to human-robot interaction (HRI). Kiesler and Lee et al. have shown the importance that naming or labelling has on the creation of ‘mental models’ with which a robot, computer or device is evaluated and which subtly biases all interactions (2002 2005).
I have analysed over 100 websites, which contain robot competition results, to select the most reliable data that covers the broadest range of competition styles and locations. This sample was then restricted to sites predominantly in English, for practical reasons, regardless of where the competition was based. More than 2/3s of the competitions evaluated were predominantly in English even though teams were globally dispersed. Less than halfway through the data collection, I have more than 1200 names from several competitions with continuous records reaching back between 9 and 18 years. It is expected that the available data will increase as the number of competitions increase and online publishing of results becomes ubiquitous. What is surprising though is the strong evidence of the evolution of a culture of naming in the robotics field. The only competitions that don’t provide the names of robots are the team/soccer competitions, where more than two robots are competing. In every other category of competition, the names of robots are recorded alongside the university, team or designer’s name. Widespread naming of robots expected only in competitions that featured social interaction with the robot.
Robotics competitions fall into several categories and my original intention was to see if there was any correlation between gender and function. The most socially interactive competitions are conversational like Loebner and Chatterbox or dance/entertainment like RoboCup. Navigation, soccer and rescue competitions like RoboCup, MicroMouse and FIRA are widespread and use a range of robot strategies and styles. Finally, robot combat competitions like Robogames and KondoCup range from technically challenging to purely entertaining but are an obvious arena for the production of masculinity as combat is not ‘feminine’.

! $!
The initial hypothesis for the naming of robots project was that the categories of competition were innately gendered, which might be caused by or contribute to the continuing gender biases in some areas of STEM, or ‘Science, Technology, Engineering and Maths’. The proportion of women in STEM, particularly in engineering and robotics has been the subject of numerous studies. Since the 1980s the proportion of women in engineering has remained relatively static and sub 20%. Robot competitions offer an additional window into the construction of gender in the field. Records of robot competitions date back to the Loebner prize in 1991 and a number of other competitions have been running annually since 1992 to meet the needs of the robotics research. Competitions complement peer review publishing, demonstrate progress in basic problems and are a way of standardising developments across multiple sites (Bonasso & Dean 1997).
Preliminary data supports the initial hypothesis, that different categories of competition are differently gendered. 26% of the Chatterbox competition bots were given female names, whereas only 8% of the robots in the Intelligent Ground Vehicle competition were female.
Figure 1. Named robots at IGVC 1993 to 2010
Names have become a ubiquitous feature of robot competitions. This project has collected 1200 names so far and found evidence of the development of the social convention in the 1990s. The IGV data in particular shows the transition from no named robots in 1993 to all robots named in 1998. The years in which only a few robots were named indicate that naming was not important for most teams until a certain critical social mass was reached. From 1998 onwards, all robots are named, every single year. Naming might happen for a range of reasons, functional, playful, expressive or emotional. A robot name is useful shorthand for describing the robot and distinguishing it from other robots for communication with others e.g. Little Blue or Johnny5. A name can be playful or expressive of a deeper relationship e.g. SexyBoy, Brother Jerome,
Jabberwocky or Bearcat Cub. A name can communicate expectations, such as Speedy or Smart. The names in this audit demonstrate all of these features.
If there is a social convention or cultural pressure to name robots, then robots will be named regardless of reason. Names do not just express the attitudes and associations of the name giver, although Levitt and Dubner’s study showed the powerful correlation between name and social status in intentional naming practices (2005). Names also generate expectations and named objects elicit different responses to unnamed objects (Reeves & Nass 1996, Nass & Moon 20000, Paepcke & Takayama 2010). Clearly some robots are named to maximise the benefit of generated expectations e.g. Smart and Overlord, but the presence of subtle biases is worth further study.
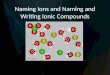
Biomorphic Robots: Viper & Warthog
Figure 2. Viper and Warthog at the 2008 Intelligent Ground Vehicle Competition (from IGVC 2008)
Preliminary data analysis shows a high level of animal identity in robot names. Surprisingly, this is not solely the province of the least humanoid robots surveyed but extends to the conversational or social agents. 26% of the IGV competition robots invoked animals as did 12% of the Chatterbox competition chatbots. The assumption was that chatbots specifically created to fool humans into believing them human would all be assigned human personality. The Chatterbox competition had a surprising number of nonhuman names. This study is coding names into 4 categories based on the Bern sex role index (Bern 1981, Nass & Moon 2000). Gender is the primary human classifier and studies of pet and vehicle names show that we continue the practice of gender coding in names, however we would expect that in robotics there would be a need for names that are neither human nor gendered.

! %!
Figure 3. Names collected for analysis
The categories applied to the naming project are MALE, FEMALE, UNKNOWN and OTHER, where MALE and FEMALE are gendered. The UNKNOWN category captures all names with animal or anthropomorphic attributes that aren’t obviously gendered. The OTHER category captures all names with mechanical or inanimate qualities. In the Chatterbox competition, 25% of names were UNKNOWN, of which 12% explicitly evoked an animal. 19% were OTHER or mechanical.
This is a surprisingly high number of non-human names for a conversational competition. It was expected that a high proportion of robots in the IGV competition would be unnamed and that named robots would be predominantly OTHER or mechanical, however, since 1998 all robots in the competition have been named and only 27% of names are OTHER or mechanical. 63% of robots in this vehicular competition have human/anthropomorphic names or animal/zoomorphic names. These results support the argument that greater identification is felt with non-humanoid robots, through a process of self-extension, rather than through empathy and anthropomorphism (Kiesler & Kiesler 2005, Groom et al. 2009).
MALE FEMALE UNKNOWN OTHER
Thor PRO Candii Robo-goat RS3
Hal Amber Jabberwocky H2Bot
Brother Jerome Spinster Lion One Biplanar
Bicycle
Achilles Anassa 4 Warthog Paradroid
Johnny 5 Hurricane Annie Creaturebot Moonwalker
Figure 4. Sample coded names
Anthropomorphism has been recorded since the 6th century BC when Xenophanes noted that gods and other supernatural beings bore a striking resemblance to their believers. The term specifically relates to the attribution of human characteristics or behaviour to gods, animals or objects. HRI researchers point out the limitations of the term ‘anthropomorphism’
which has been stretched to include animism and zoomorphism (Nass & Moon 2000, Bartneck et al. 2008 Groom et al. 2009). It has also been used to describe features of the robot and features of the social relationship that the robot evokes. It is clear from a variety of studies that social relations with a robot have many contributing factors and require very little in the way of anthropomorphic, animistic or lifelike cues.
Nass & Moon describe the majority of responses to media, computers and robots as ‘mindless’ or ‘ethopoeic’, which comes from the Greek for character representation. They have shown that people do not actually believe that their media, computer or robot ‘deserves’ human or animal treatment but that deeply rooted scripts prompt social responses to simple stimuli. This ‘mindlessness’ consists of over-use of human social categories, such as gender or ethnicity, over-learned social behaviours, such as politeness and reciprocity and premature cognitive commitment (Langer 1989, Nass & Moon 2000). Nass & Moon further describe ‘ethopoiea’ and the mindless behaviour that characterizes it as arising from a variety of cues, such as context, appearance, voice, action, expectation (Nass & Moon 2000, Charlton 2006).
The majority of our social responses to robots are not anthropomorphic or conscious. Mindless behaviour due to ethopoeic identification is largely unconscious (Nass & Moon 2000). People in general are quite clear that they are reacting with a car, computer or robot so their behaviour is actually in direct contradiction to their conscious beliefs. In this paper, the term ‘biomorphic’ is utilised to further separate the features or characteristics of robots from the potential social interactions. Biomorphic form resembles living objects. Biomorphism was used to describe an art movement in the 20th century, but the term is nonetheless very useful for analysis of human-robot interaction, in which the name audit shows a significantly high proportion of animal names or characteristics that are attributed to robots. Biomorphism is used rather than animism, which implies a level of spiritual significance.
The high proportion of biomorphic names in a vehicular robot competition supports the findings of Kiesler & Kiesler (2005) and Groom et al. (2009) that non-humanoid objects are named as an extension of self or prosthesis. These studies indicate that the naming of robots will trigger scripts for social response. If a robot has a public persona or appearance then the choice of names is more than just an extension of the name giver or designer. The name will continue to influence the perception of the robot

! &!
even though expertise levels minimise conscious effects (Kiesler & Kiesler 2005, Groom et al. 2009).
So not only do named robots elicit responses, but biomorphic naming occurs across all types and styles of robots in a loop of ethopoeic or mindless responses. A number of researchers are developing scales to measure the impacts and effects (Bartneck et al. 2008, Kiesler & Goetz 2002, Takayama 2010) of social responses to technological objects. These questions are at the heart of Science and Technology Studies or Digital Cultures. Under what conditions is technology prosthetic, or environmental or functioning as a social agent (Cleland 2010)? The gendering of robotics as an industry appears environmental and is reflected in competition categories (Adams 1998). The biomorphic naming of robots shows gendering is just one of the affects of technology used as a prosthetic identity.
Gendered Robots, Mastery and Identity
Figure 6. Intelligent Ground Vehicle Competition (IGVC) data shows low proportion of female names.
The high level of prosthetic or ‘self extension’ naming extends to competitions with a focus on social actor robots, as evidenced by the higher proportion of male names than female names in both the IGV and Chatterbox competitions. The Harvinatorbot, which incorporates the designer’s name, is clearly self-extension rather than social agent. The expectation was that there would be a high proportion of female names in the Chatterbox competition due to stereotypes that females are better talkers and more pleasant and personable. In fact, male names were slightly more prevalent at 30% compared to 26% chatbots with female names. This might correlate to psychological literature, which says that males are considered to have greater authority and be more believable when giving assessments, which would indicate that the chatbot name givers were using conversational strategies invoking authority and judgements in order to be believable. However the Chatterbox competition also assesses qualities of learning, personality, humour and popularity in which authority figures might be less successful. Therefore it is likely that consciously
or otherwise, male chatbots were seen as equally or more desirable than female chatbots.
A high level of mastery is expressed in the name audited. Many robots are named after gods, goddesses and heroes, like Achilles, Artemis, Thor and Anassa, or given titles like Archon, BlackKnight, Overlord, Moxom’s Master, English Tutor, or names that express a significant quality, like SMART, FAST, or Hurricane Annie. There is a gender difference in the level of mastery of names. Male names are far more likely to express mastery, whereas fewer than half of the female names do. In the IGV competition, for every Athena and Artemis, there is an Amber and a Candii. Candii rather noticeably sports the sort of reclining nude decals more usually found on large trucks. How this relates to robots as prostheses requires more examination. Rather than the robot expressing skill and mastery, which is particularly important in a competition environment, either the need of the designers to ‘subordinate’ the robot is more important, or the robot is standing in the role of social agent, not prosthesis.
Figure 5. Cornelius and Candii at the Intelligent Ground Vehicle Competition (from IGVC 2008)
Studies done into virtual worlds and avatars suggest that gender difference is no boundary to self-extension but leads to simplified, stereotyped avatars (Adams 1998). Robots with the designers of the same gender tended to exhibit a higher level of whimsy and subtlety in the naming. The role that the social response to robots in research, design and education robots plays in creating the cultural environment needs further study. Robotics is a clearly gendered field.
However, the continued existence of a large number of UNKNOWN or OTHER names seems to defy a human tendency to categorize everything by gender (Bowker & Starr 1999, Nass & Moon 2000). Although closer analysis might indicate that more of

! '!
these names are gendered than I have coded, as some linguistic studies show that we attribute gender to English words based on other cues (Boroditsky & Schmidt 2003) and cultural studies theorists posit that the unmarked term is by default male (Chandler 2007). It is the liminal or fluid quality of these names that is interesting. Creaturebot, Hex and Gamblore might be either gender or they might continue to refuse categorisation. The openness of naming a robot as an ‘other’ is potentially transformative.
Version Control: Fixing the Fluid Some robots are numbered, dated or given other suffixes, like Johnny-5, Anassa 4, Omnix 2007, Candiii. Some robots have the designer’s names or initials embedded, like Mikerobot, Harvinatorbot. Some robots have qualifiers added, Bearcat Cub, Optimus Prime, Little Blue, to distinguish them from other Bearcats, Optimus or Blues. Some have a thematic connection like Archon and Anassa, or a surname like BlastyRAS or CeraTOPS and CapaciTOPS. Some keep the same name but offer disclosures. The ALICE website outlines which version has been used and where and when, although ALICE has no overt markers. HAL has no markers at all on his website but the implication that he is growing and changing.
Version control highlights the complex issue of robot identification and difference. At what point is a robot a different robot? What constitutes identity in a robot? Who or what certifies it? Extending Haraway’s articulation of primates as subject/objects to robotics, Suchman describes the process by which ‘relations and practices get mistaken for nontropic things-in-themselves’(Haraway 1997:141, Suchman inpres). Suchman calls for examination of the mundane material practices of robotics to understand the creation of subject/objects. Where Suchman explores the framing of robotics encounters, a finding that emerged from this study is the ‘agential cut’ displayed by version control, ‘through which boundaries and associated entities are made’ (Suchman in pres:3, Barad 2007). Identity is reconstituted in versions of the robot. In the future, there may be robotics registry offices and all that the compulsory certification of identity entails.
Conclusion The widespread role of robot competitions in the research and education community makes this avenue of research an effective and efficient large-scale method of studying behaviours, particularly implicit
ones, which supports the findings of other more psychological HRI research. While the ‘naming of robots’ project is still in process and analysis is only preliminary, the scale of numerical results will be sufficient to generate statistically significant results. Results have been coded without cross checking, however the guidelines for distinguishing between male, female, unknown and other are explicit, transparent and repeatable.
This study has found that once robot names are publicised a culture of naming seems to develop, leading to complete compliance. Robot naming follows gender stereotyping for function. 26% of social agents were named female as opposed to 8% of autonomous vehicles. The high proportion of biomorphic naming of vehicles (67%) supports the theories that non-humanoid robots are viewed as prostheses or extensions of self. Similarly, the male names in the social agent competition are suggestive of self-extension. This study also finds evidence of a wide range of version control strategies, which highlight the issues involved in fixing robot identity.
Future research into robot identity is suggested and a code of ethics for the construction of robot identity which takes into account the ways in which humans and robots interact, and the subtle biases and power relations that are invoked in an engineered ‘model (in)organism’ (Suchman inpres).The robot is both a model organism, standing in for humans and the biomorphic evoker of ‘ethopoeic’ or mindless social responses (Nass & Moon 2000). In the future, robot identity and version may become an issue of governance and legality. Fluid robot identity allows more scope for identity politics, addressing class, ethnicity and gender issues, but there is also strong evidence of an innate desire to fix robot identity for personal, psychological, and practical reasons. Will a robot by any other name still seem the same?
References: Alac, M. (2009). ‘Moving Android: On social robots and body-in-interactions’. Social Studies of Science 39: 491-528.
Adams, A. (1998). Artificial Knowing. London: Routledge
Barad, K. (2007). Meeting the Universe Halfway: Quantum Physics and the Entanglement of Matter and Meaning. Durham, North Carolina: Duke University Press
Bartneck, C., and Forlizzi, J. (2004). ‘Shaping human-robot interaction: Understanding the social

! (!
aspects of intelligent robotic products’ (PP. 1731 – 1732). CHI04 Extended Abstracts, Vienna, Austria, April, 2004.
Bartneck, C., Croft, E., & Kulic, D. (2008). ‘Measuring the anthropomorphism, animacy, likeability, perceived intelligence and perceived safety of robots’. Proceedings of the Metrics for Human-Robot Interaction Workshop in affiliation with the 3rd ACM/IEEE International Conference on Human-Robot Interaction (HRI 2008), Technical Report 471, Amsterdam pp. 37-44.
Bern, S.L. (1981). ‘Gender-schema theory: A cognitive account of sex typing’. Psychological Review, 88(4), 354-364.
Bonasso, P. & Dean, A. (1997). ‘A retrospective of the AAAI robot competitions’, AI Magazine AAAI Vol. 18 No. 1
Boroditsky, L. & Schmidt, L (2003) ‘Sex, Syntax and Semantics’, viewed on 14 May 2010 at <http://www-psych.stanford.edu.ezproxy1.library.usyd.edu.au/~lera/papers/gender.pdf>.
Bowker, G. C. & Star, S. L. (1999). Sorting Things Out: Classification and Its Consequences. MIT Press: Cambridge, MA.
Brooks, R. A. (2002). Flesh and Machines: How Robots Will Change Us. New York: Pantheon Books.
Chandler, D. (2007) Semiotics: The Basics, Routledge, London, UK
Charlton, J.P. (2006). ‘How human is your computer? Measuring ethopoeic perceptions of computers’ Psychology: Book Chapters Digital Commons Bolton, viewed 1 November 2010 at <http://digitalcommons.bolton.ac.uk>.
Cleland, K. (2010). ‘Prosthetic Bodies and Virtual Cyborgs’ Second Nature March 2010, Vol 2 No1, viewed 12 August 2010 <http://secondnature.rmit.edu.au/index.php/2ndnature>.
Cockburn, C. (1999). ‘Caught in the wheels: the high cost of being a female cog in the male machinery of engineering’ in The Social Shaping of Technology, 2nd Edition, 2010 Mackenzie & Wajcman (eds.) New York and London: Open University Press.
Cockburn, C. (1999). ‘The material of male power’ in The Social Shaping of Technology, 2nd Edition, 2010 Mackenzie & Wajcman (eds.) New York and London: Open University Press.
Giddens, A. (1991) Modernity and Self-Identity. Self and Society in the Late Modern Age. Cambridge: Polity
Goetz, J., Kiesler, S., & Powers, A. (2003). ‘Matching robot appearance and behavior to tasks to improve human-robot cooperation’ (pp. 55-60). Proceedings. ROMAN 2003. The 12th IEEE International Workshop on Robot and Human Interactive Communication, Vol., IXX, Oct. 31-Nov. 2,, Milbrae, CA.
Groom, V., Takayama, L. & Nass, C. (2009). ‘The Impact of Robot-Building and Robot Form on Operators’, Proc of Human Robot Interaction (HRI), San Diego, CA. p.31-36 (2009)
Haraway, D. J. (1989). Primate Visions: Gender, Race, and Nature in the World of Modern Science, New York and London: Routledge.
Haraway, D. J. (1991). Simians, cyborgs and women: the reinvention of nature. London: Free Association.
Haraway, D. J. (1997). Modest_Witness@Second_Millennium.FemaleMan_Meets_OncoMouse: feminism and technoscience. New York; London: Routledge.
Haraway, D. J. (2008). When Species Meet, Minnesota: University of Minnesota Press.
Harding, S. (2008) Sciences From Below: Feminisms, Postcolonialities, and Modernities, Duke University Press.
Heidegger, M. (1977). The question concerning technology, and other essays. New York: Harper & Row
IFR Statistical Department, (2010). ‘Executive Summary - World Robotics 2010 Industrial Robots’ & ‘Executive Summary - World Robotics 2010 Service Robots’, International Federation for Robots, viewed 1 October at <http://www.worldrobotics.org/index.php>.
ISO 8373:1994. ‘Manipulating Industrial Robots - Vocabulary’, International Standards Organisation, viewed 20 October 2010 at <http://www.iso.org/iso/catalogue_detail.htm?csnumber=15532>
Keller, E. F. (1985) Reflections on Gender and Science. Yale University Press
Keller, E. F. (2002) Making Sense of Life: Explaining Biological Development with Models, Metaphors, and Machines. Harvard University Press
Kiesler, S. & Goetz, J. (2002). ‘Machine trait scales for evaluating mechanistic mental models’. Unpublished manuscript. Posted on PPR website. Viewed on 1 October 2010 at <http://anthropomorphism.org/pdf/Machine_scale.pdf>

! )!
Kiesler, S. & Hinds, P. (2004). Introduction to this special issue on human-robot interaction. Human Computer Interaction, 19, 1-8. Viewed on 1 October 2010 at <http://peopleandrobots.org/HCIJ_intro.pdf>
Kiesler, T. & Kiesler, S. (2005) ‘My pet rock and me: An experimental exploration of the self-extension concept’, Advances in Consumer Research, 32.
Langer, E. (1989). Mindfulness. Reading, MA: Addison-Wesley.
Latour, Bruno (1988) The pasteurization of France. Cambridge, Mass.: Harvard University Press.
Lee, S., Kiesler, S., Lau, I.Y. and Chiu, C. (2005). ‘Human mental models of humanoid robots’. Proceedings of the 2005 IEEE International Conference on Robotics and Automation (ICRA ’05). Barcelona, April 18-22., 2767-2772
Levitt, S. & Dubner, S. (2005) Freakonomics: A Rogue Economist Explores the Hidden Side of Everything William Morrow,
Libin, A. & Libin, E. (2004). ‘Robotic Psychology’, in Encyclopedia of Applied Psychology, vol. 3. Oxford: Elsevier pp 295-298.
Mackenzie, D. & Wajcman, J. (1999, 2010). The Social Shaping of Technology. 2nd Edition, 2010 Mackenzie & Wajcman (eds.) New York and London: Open University Press.
Moravec, H. (2009). ‘Rise of the Robots - the future of artificial intelligence’, Scientific American, March 23 2009, viewed 1 October 2010 at <http://www.scientificamerican.com/article.cfm?id=rise-of-the-robots>
Nass, C. & Moon, Y. (2000). ‘Machines and mindlessness: Social responses to computers’ Journal of Social Issues, 56(1), 81-103
Norman, D. (2004). Emotional Design: why we love (or hate) everyday things, New York: Basic Books.
Paepcke, S. & Takayama, L. (2010). ‘Judging a Bot By Its Cover: an experiment on expectation setting for personal robots’, Proc of Human Robot Interaction (HRI), Osaka, Japan (2010).
Powers, A., & Kiesler, S. (2006). ‘The advisor robot: Tracing people’s mental model from a robot’s physical attributes’, 218-225. Conference on Human-Robot Interaction 2006. Salt Lake City, March 1-3.
Reeves, B., & Nass, C. I. (1996). The media equation: how people treat computers, television, and new media like real people and places. Stanford, Calif., New York: CSLI Publications, Cambridge University Press.
Robot World 2010. ‘Robot Industry Status’, Korea Institute for Robot Industry Advancement and Institute of Control, Robotics & Systems, viewed 20 October 2010 at <http://www.robotworld.or.kr/?doc=robot_04.php&md=english>
Rouse, J. (1992). ‘What are Cultural Studies of Scientific Knowledge?’ Configurations, 1.1:57-94
Schultz, A. (2010). ‘Robots: AI Methods in Robotics’, AI Topics Editorial Board, Association for the Advancement of Artificial Intelligence (AAAI), viewed 20 October 2010 at <http://www.aaai.org/aitopics/pmwiki/pmwiki.php/AITopics/Robots>
Suchman, L. (1999). ‘Working relations of technology production and use’ in The Social Shaping of Technology, 2nd Edition, 2010 Mackenzie & Wajcman (eds.) New York and London: Open University Press.
Suchman, L. (2007). Human-Machine Reconfigurations: Plans and Situated Actions, 2nd Edition. New York: Cambridge.
Suchman, L. (2010). ‘Subject Objects’ (inpres).
Takayama, L. (2009). ‘Toward a Science of Robotics: Goals and Standards for Experimental Research’ Robotics: Science and Systems (RSS) Workshop on Good Experimental Methodology in Robotics, 2009, Seattle, WA, viewed 3 November 2010 at <http://www.willowgarage.com/publications>
Turkle, S. (1984). The second self: computers and the human spirit. New York: Simon and Schuster.
Turkle, S. (2006). ‘A Nascent Robotics Culture: New Complicities for Companionship’, AAAI Technical Report Series, July 2006. viewed 15 March 2010 at <http://web.mit.edu/sturkle/www/pdfsforstwebpage/ST_Nascent%20Robotics%20Culture.pdf>