Embed Size (px)
Citation preview

On the dual integral representation and
its application to vibration problems
H.-K. Hong, J.-T. Chen
Department of Civil Engineering, Taiwan
University, Taipei, Taiwan
ABSTRACT
In this paper, the dual integral representation in series forms or briefly thedual series representation for transient vibration problems is derived usingthe concept of modal dynamics. The four kernel functions in this represen-tation are in degenerate series forms which display symmetric and transposesymmetric properties. Assembling the four kernel functions, the total sym-metry can be obtained. The potentials induced by the kernels are expressedin terms of uniformly convergent, pointwise convergent, and divergent seriesfor modal dynamic problems investigated in this paper, instead of continu-ous, discontinuous, and pseudo-continuous functions in the form of integralswith different degrees of singularity for static and direct transient problems.The technique used for the extraction of the principal values of the singularintegrals is herein transformed to that of summability of the series or Stokes'transformation. The Cesaro sum technique is employed not only to treatpointwise convergence for the Gibbs phenomenon but also to make the diver-gent series summable to the finite part which is exactly the physical value ofthe traction due to support motion. The formulation is also applied to discreteMDOF(multi-degree of freedom) systems especially in earthquake engineering.Finally, illustrative examples are given to see the validity of the dual seriesrepresentation.
INTRODUCTION
Since 1986, the dual integral representation has been proposed for crack prob-lems in elasticity by Hong and Chen [1,2,3,4] and many boundary elementresearchers have paid more attention in this field. Gray [5] also found thedual integral representation for the Laplace equation, although he did not call
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X

378 Boundary Elements
such a name. Martin, Rizzo and Gonsalves[6] termed the new kernel in thedual integral equation model as "hypersingular," while earlier Kay a [7] calledthe kernel "superstrong." A general purpose program was developed by theWIT group and termed the "dual boundary element method(DBEM)"[8]. Aprogram implemented by Lutz et al. was also reported[9). Mathematicallyspeaking, all these problems are introduced due to the derivatives of doublelayer potentials. In the literature, the mathematical problems have been firstencountered by Hadamard[lO] and Mangler[ll]. The extension of the hyper-singular formulation to elastodynamics was fully developed by using directtransient dynamics[l2,13],
Recently, the dual integral equation model has been extended to dynamicproblems[14], random vibration[l5] and active control(l6]. In this paper, weextend the dual integral representation to transient problems using modaldynamics. The four kernels in this representation will thus be transformedto degenerate forms. The regularization of the derivative of the double layerpotential will be treated by the Cesaro sum[l7j or Stokes' transformation (18]in a similar spirit of the Hadamard principal value of the hypersingular kernel.The application to the discrete system will also be discussed. Based on thedual integral formulation, the modal participation factor of support motioncan be calculated by taking advantage of Betti's law free from determiningthe quasi-static solution in structural dynamics. Finally, two examples areconsidered including continuous and discrete systems.
DYNAMIC RESPONSE OF ELASTIC BODY TO ARBITRARY
EXCITATIONS
PROBLEM STATEMENT: Consider a homogeneous, isotropic, linear,elastic continuum with finite domain D bounded by boundary B = Bt U B^\the governing equation for the displacement u(x,f) at a domain point x attime t can be written as
p u + (lap + 0£){u} + £{u} + f (x, t) = 0, x G D, t e (0, oo), (1)
where a,0 are the damping coefficients, p is the mass density, f(x,i) is thebody force excitation, and the operator £ means
I -(A + G) VV • u - GV*u, elastic body,-<70, elastic shear beam, (2)£70, elastic flexural beam,
where A and G are Lame's constants, E is Young's modulus and I is the mo-ment of inertia of the cross section of the flexural beam. The time-dependentboundary conditions are
T{u(x,()} = t(x,f) = t(x,«), x G Bt, (3)
u(x,i) = u(x,(), x e B», (4)
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X

Boundary Elements 379
where u is the prescribed displacement on #„, t is the traction on B, t is theprescribed traction on B*, and T is the traction operator defined as
|[AI(V • u) + GVu 4- GI • (uV)J - n, elastic body,G~, elastic shear beam,—EI-£$, elastic flexural beam.
(5)The initial conditions are
u(x,0)=uo(x), (6)
ii(x,0)=vo(x). (7)
For comparison purposes, both the integral formulations for direct and modalelastodynamics are derived as follows:
DIRECT DYNAMIC ELASTICITY: Extending the dual integral repre-sentation to transient elastodynamics, the displacement u(x, t) and tractiont(x, t) for a domain point x at time t can be written as
u(x,*) = / f U(s,x;r,*)-t(s,r)<f£(s)dr- /"' / T(s,x;r,*) • u(s,r)dB(s)drJo JB JQ JB
(8)
/ L(a,x;T,t)-t(s,r)dB(s)dT-o JB JQ JB
L(s,x;0, t) - pUo(s)dD(s), (9)
where U(s, x; r, f), T(s, x; r, t), L(s, x; r, t) and M(s, x; r, () are four kernel func-tions. The dual integral formulations for the displacement and traction on asmooth boundary point x at time t are
au(x,*) = R.P.V. I I U(s,x;r,*)-t(s,r)dB(s)dr (10)J 0 J B
-C.P.V. r / T(s,x;r,0-u(s,r)dJB(s)drVo JB
U(s, x; 0, t) • pvo(s)d£)(s) + j U(s,x; 0, t) • pUo(s)dD(s),
ot(x,0 = C.P.V. [ f l(*,x;T,t)-t(*,T)dB(s)dr (11)«/o «/s
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X
380 Boundary Elements
-H.P.V. /" I M(s,x;T,t)-u(a,r)dB(s)dTJo JB
L(g,x;r,t).f(i,r)dD(s)«fro JD
where a is 1/2 for 1-D, TT for 2-D, or 2?r for 3-D, and R.P.V., C.P.V. and H.P.V.denote the Riemann integral, the Cauchy principal value and the Hadamard(orMangier) principal value, respectively. In discretized numerical calculations,it is found that the matrix inversion is necessary at each time-marching stagefor the direct dynamic method. To avoid these repetitive time-consuminginversions, the modal dynamic method is employed in the following.
MODAL DYNAMIC ELASTICITY: In the deriving procedure, let thesolution be decomposed into two parts[l9]:
fc(x), (12)6=1
where U(x, t) denotes the quasi-static solution and the second term composedof various eigenfunctions u&(x), k G N, TV being the set of natural numbers,weighted by generalized coordinates #&(() is the dynamic contribution due tothe inertia effect. The quasi-static part U(x,f) satisfies
£{U(x,0}=0, x e D, (13)
and the nonhomogeneous boundary conditions:
U(x,t) = u(x,i), % € B«, (14)
T{U(x,t)} = t(x,«), % 6 Bt. (15)
The eigenfunctions u*(x), k & N, satisfy the eigenvalue problem:
£{u*(x)} = -p ul u*(x), x 6 D, (16)
tt(x) = 0 , x € fl,, (IT)
u*(x) = 0 , x 6 B«, (18)
and have the orthogonality property:
x) • u,(x)<U?(x) = 6uNk, (19)
where 6u is the Kronecker delta. The q\ satisfies the governing equation,
ft (0 + 2(,w,% + wf«(t) = [V?(t) + Fi(t) + 2oF,(0), (20)
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X

Boundary Elements 381
and the initial conditions,
(21)
<L(0) = -A.(0) + - m, (22)
where
(23)
I, (24)
Fi(t) = -I pU(x,t)-ui(x)dD(x), (25)
Am = / pUo(x)-Um(xKD(x), (26)JD
/Cm = /pVo(x)-Um(x)dI?(x). (27)J D
From Eqs.(25) and (19), the Fourier series representation for U(x,f) isfound as follows: oo
/=!The above series converges in the mean. By defining more generalized coor-dinates ?,»(*)>
Eq.(20) is simplified to
the solution of which is
r)}]e-«-""<'-') «n(wi(t - r))dr.
where the n"* modal damped frequency u% — c^ny 1 — $n- Applying Betti's lawto the quasi-static part U(x, t) and the eigenfunctions u*(x), we obtain[20]
(32)
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X

382 Boundary Elements
where
U%(t) = I u,n(s) • i(s,t)dB(s) +/?—{/ iim(s) • t(s,f)&B(s)}, (33)
(s)}. (34)
Hence, the displacement u(x, t) can be represented by the following series:
- r)) dr} u«(x). (35)
Eq.(35) may be recast to be in the form of Eq.(8) with
U(«,x;r,t) = £ _Lje-«—('-')„•„(„-(* - r)) u,(x) u.(s), (36)n=l *" n
T(g,x;r,t) = £ -L_«-<-.('-')«n(w;|(i - r)) u,(x) t.(«). (37)n=l ^ n ri
Instead of resorting to the Mindlin-Goodman decomposition[19], we may em-ploy the eigenfunction (generalized Fourier series) expansion method by di-rectly introducing[2l|
u(x,t) = f; (0un(x) (38)n=l
to be substituted into Eq.(l), thus rending the same result of Eq.(35).
It is worthy noting that the series sum of the U (t)Um(x) terms is uni-formly convergent everywhere, while the T (t)u (x) terms is pointwise con-vergent near the boundary 0%. Although a term-by-term differentiation is notpermissible for the pointwise convergent series representation for u(x,t) in aclassical sense, nevertheless if one directly differentiates the piecewise conver-gent series without thoughtful considerations; i.e., the traction operator is stillapplied to Eq.(35) in a generalized sense:
(39)
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X
Boundary Elements 383
then the regularization technique is needed to extract the finite parts in thefollowing section. Eq.(39) may be recast to be in the form with Eq.(9) with
L(s,x;r,t) = £ e' ' sin( (t - r)) t.(x) u»(s), (40)n=l
M(s,x; r, t) = £ e-<-"<'-'>«n(w|!(t - 0) MX) t.(«). (41)n=l •*"'»'*'n
If regularized Eqs.(35) and (39) are the dual integral representation in se-ries forms or briefly the dual series representation. Each term of the seriesis seen to be a general Duhamel integral. Its kernel functions U(s,x;r,t),T(s,x; r,t), L(s,x;r,t), and M(s,x;r,f) all have the same decaying oscillatingfactor g-f"W"(*-?) sin(u*(t - r)) and represent system characteristics, whereasits density functions represent input excitations, but the initial disturbancesappear in the free terms, A^ and /c , outside the integral signs.
Based on the above formulations, the m"* modal participation factorsfor Qn(t) due to boundary support motion and due to boundary traction arerespectively transformed to boundary integrals,
I p U(x, 0 • u«(x) dD(x) - - / Us) • u(s, r) dB(s), (42)J D J B*.
I p U(x, t) • u,»(x) dD(x) - / u,.(s) • t(s, r) dB(s). (43)J D * Bt
Thus, the m"* modal participation factors can be understood as either thecorresponding modal displacement Uni(s) in the case of the prescribed excita-tion of boundary traction t(s,r) or the corresponding modal reaction tm(s)at the support point in the case of the prescribed excitation of boundary sup-port motion u(s,r). It is observed that the results of modal elastodynamicsdiffer from those of direct elastodynamics in three. One is that the closed-form kernel functions for the direct approach degenerate to in series formsfor the modal approach, thus calling for different regularization techniques,which will be elaborated later. Another is that the integrals with the U andL kernels over boundary B for the direct approach reduce to only over Btfor the modal approach, and those with the T and M kernels reduce to onlyover BU. These beneficial reductions are due to our specification that u*(s)and tn(s) contained in the modal kernel functions satisfy the homogeneousboundary conditions of Eqs.(17) and (18). The third is that the dual seriesrepresentation makes no difference whether the point is in the domain D oron the boundary B. In real calculations, the series sum of the £7 (£)t (x)terms is pointwise convergent, while that of the T (t)t (x) terms is diver-gent. The sum of the pointwise convergent series can be obtained in the senseof convergence in the mean for the discontinuity across the boundary Bt. Forthe sum of divergent series, all the traction values in the domain diverge andsome regularization techniques will be considered to extract its finite parts inthe following two sections.
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X
384 Boundary Elements
REGULARIZATION — STOKES' TRANSFORMATION
From the standpoint of ordinary convergence, the legitimacy of the term byterm differentiation of series can only be guaranteed by rather strong require-ments. We shall relax this constraint by two regularization techniques, onebeing Stokes' transformation and the other being a posterior treatment of theCesaro sum.
The natural way to differentiate the pointwise convergent series is theStokes' transformation, which uses unmatching boundary data, for exampleat x = 0,
•'••H a fcM-M*?*). o"*<i, <«»and requires the series differentiation to be
»'(*,«) = £ £(*)«"(**""/***). 0 < x < /, (45)n=l *
where g (t) is determined by the Fourier coefficient formula and Eq.(44) as
&(<) = a(t) + 7/Nn(0. » € N. (46)
In view of Eq.(46), Stokes' transformation recovers the lost terms of direct dif-ferentiation of Eq.(44). In order to accelerate the convergence rate of Eq.(44),Eq.(45) can be integrated to get the displacement solution with matchingboundary data.
REGULARIZATION — Cesaro SUM TECHNIQUE
Due to the support motion acting as a double layer potential, which is the ter-minology of potential theory and the dual integral representation[l,2,3,4], theintegral representation for displacement is singular and, similarly, the seriesrepresentation for displacement is pointwise convergent when the discontinuityacross the boundary is present. Therefore, the differentiation of the integrandof the integral for displacement by interchanging the order of differentiationand integration to determine traction results in a hypersingular integral and,similarly, the term by term differentiations of the series for displacement by in-terchanging the order of differentiation and summation to determine tractionresult in divergent series. In the viewpoint of the dual series representation,the Cesaro sum regularization technique is necessary to extract the finite partrather than the Hadamard principal value for the hypersingular integral equa-tion.
The general (C, r) Cesaro sum is defined as[l7]
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X

Boundary Elements 385
where C* = kl/(r\ (k - r)!) and the partial sum is
3*=E^(0«n(*) = E«n(*.0- (48)n=0 n=0
The (C, 1) sum reduces to the conventional Cesaro sum:
(49)Similar formulae can be developed for the higher order Cesaro sums. TheGibbs phenomenon exhibited in the pointwise convergent series of Eq.(35)can be treated by the (C, l) operator:
(C7.1)4 / \ ,- / J. \T]C "* "* sin(cj__ [t — T) ] CLT Umix) r r. (50JV » / L s ^ l A xr In v m v / / "*\ / J J * \ /nv=l ni "*
while the finite part of the divergent series of Eq.(39) can be extracted by the(C,2) operator:
m=l m"* w* "
The larger the r value of (C, r) is, the smoother result one can obtain. Wesuggest that a larger r should be taken for a stiffer structure.
ON THE FOUR KERNEL FUNCTIONS
Examining Eqs.(36), (37), (40) and (41), we can obtain the following relation-ships,
U(«,x;r,«)=U(x,>;r,0, (52)
T(s,x;r,*)=L(x,s;r,t), (53)
M(s,x;r,0=M(x,8;M). (54)
Assemble the four kernel functions in a total matrix,
I M]- («)
According to T = L*\ the total matrix [G] is symmetric.
APPLICATION TO DISCRETE SYSTEM
All the above formulations are applied to the continuous systems; now con-sidered is the discrete system with the governing equation:
(56)
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X

386 Boundary Elements
where [M] is mass, [C] is damping, and [K] is stiffness, all being square ma-trices of order n, the total number of degrees of freedom. Decomposing thedegrees of freedom into two sets, the supported and the unsupported denotedby subscripts r and / respectively as shown in Fig.l, Eq.(56) can be writtenas
[ Mu M,, 1 f U, \ [ Cu Ctr ] I U| \ , [ KU Kir 1 f U, \ _ f P, 1[ Mr, M,, ] \ u, J + [ CH CW J \ u, j + [ Krt K,, \ \ u, J - \ P, I '
(57)where {P } contains the TV, reaction forces, {P/} prescribes the NI loads, and{u,} prescribes the N? support motions where Nr -h -/V/ = n. Similarly to thecontinuous system, the solution can be decomposed into two parts,
The {17} denotes the quasi-static solution satisfying
f Ku K*UU.}t Pf ][jf,, ^J\^/-\p; ]'
in which {P?} is the reaction of the quasi-static solution and {Pf} = {Pi} and{[/,.} = {ur} by definition. The {di} is the dynamic solution, with
(60)
where
[*«] = [*',*',•• •,*"'] (61)
has the following properties
[$,f[M»)($»] = dto»(l), (62)
(*«f[C«][*,,l = Mag(2tiUi), (63)
[*ur[«il[*ul = A'off(w?), (64)
in which & satisfies Eq.(23), that is
(C] = 2a[M]+P(K\, (65)
and {g/} satisfies
(66)
where we have defined the augmented matrix of order NI x n
[*mf = [*JO]. (67)
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X

Boundary Elements 387
Note that in the present formulation, it encounters no difficulty to retain the[$,uF|C]{Z7} term in Eq.(66), in contrast to some papers in which the termwas always neglected[22j.
For simplicity, we assume {PJ = {0} and obtain from Eq.(59)
(68)
From Eq.(59) and the following eigen equation
o0
we obtain the discrete system version of Betti's law,
where {R*} denotes the i"* modal reaction forces with Nr entries.
Similarly as in the continuous system, we can define
{Fi} = -[*«f[M\{U}. (71)
Therefore,{U} = -[*„,]{*•«}. (72)
The solution can be written as
{«,} = {C/,} + (*«!{«} = [$»){»}, (73)
where each element qi, I = 1, 2, • • • , JVj, of {%} satisfies
«(*) + 2fiwifl» + w?«(t) = E 4(«'(*) + 2« «r(*))- (74)r=l "l
Thus,
-<-«'-') 6 ( (4 - r)) [F,(r) + 2aF,(r)]dr, (75)
%(() = T"' /* e-«-'('-') «m(w/(t - r)) (F,(r) + /?F,(r)]dr. (76)•ty\A - f?
It is noted that the modal participation factor F' of support motion {u,} is
r' = , / = 1,2,.-AT,. (77)*
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X
388 Boundary Elements
NUMERICAL EXAMPLES
We present one example of a continuous shear beam and one example of adiscrete flexural beam.
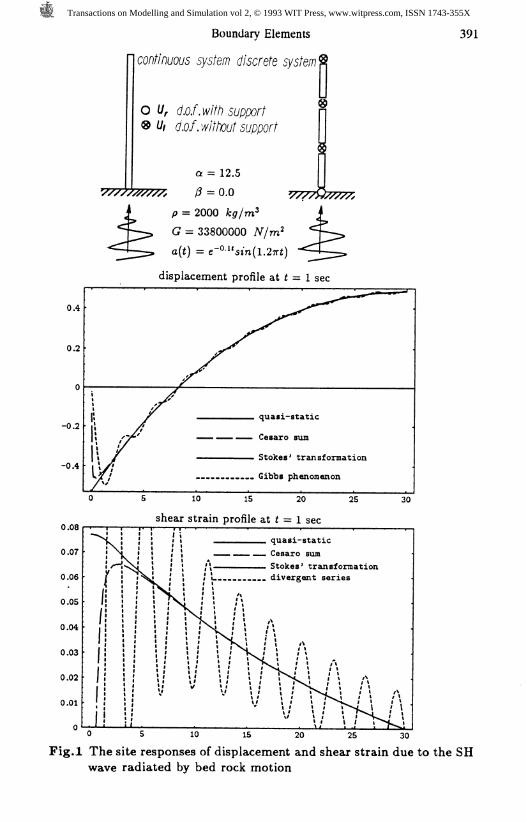
SHEAR BEAM: Consider the cantilever shear beam subjected to supportmotion as shown in Fig.l, which is employed to simulate the site response tobed rock motion due to the SH wave. Using the continuous system formula-tions, the displacement and shear strain responses match well for all the threemethods, quasi-static, Stokes' transformation and the Cesaro sum. The Gibbsphenomenon and divergence of the series are circumvented by the Cesaro sumand also by Stokes's transformation in the dual series representation.
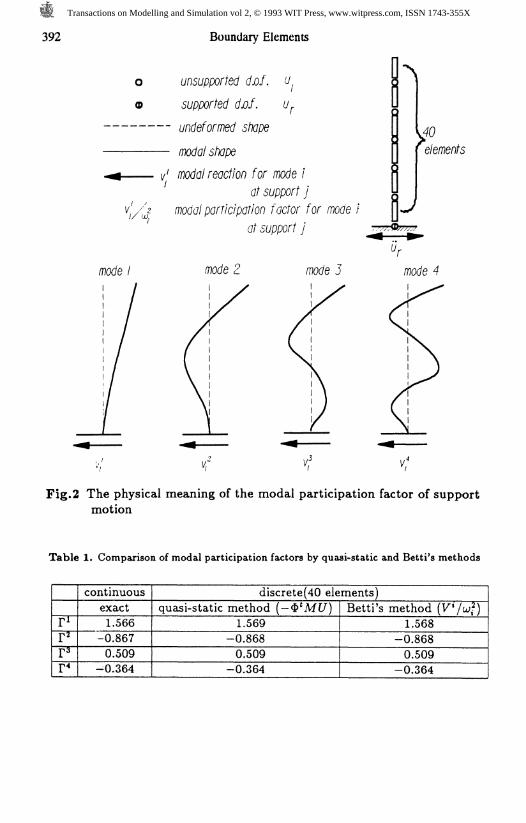
FLEXURAL BEAM: Modeled by the discretized system, the cantileverflexural beam subjected to base excitation is explored to find the modal par-ticipation factors by the quasi-static method and by Betti's method. Thephysical meaning of the modal participation factor of support motion is justthe modal reaction over the modal frequency squared as shown in Fig.2. Basedon the developed general purpose program DYNMLT, the results are satisfac-tory as shown in Table.1. The result of Betti's law which is a little better thanthat of the quasi-static method can be attributed to the fewer operations ofcalculations after considering Eq.(70).
CONCLUSIONS
A unified dual series representation for the elastic body and shear and flexu-ral beams subjected to arbitrary transient excitations has been derived with ageneral purpose program for transient analysis developed. Using the regular-ization techniques of the Cesaro sum or stokes' transformation, the divergentseries can be made summable to finite parts. Both continuous and discretesystems have been considered. This research has demonstrated the importanceof including the modal reaction in addition to the modal reaction in the eigendata, because the modal reaction is proportional to the modal participationfactor of support motion just as the modal displacement is proportional tothe modal participation factor of boundary force and body force. This paperextends the possible application of divergent series to earthquake engineering.
REFERENCES
1. Chen, J.T., On Hadamard Principal Value and Boundary Integral For-mulation of Fracture Mechanics, Master Thesis Supervised by Prof. H.-K. Hong, Taiwan University, Taipei, Taiwan, 1986.
2. Hong, H.-K., and Chen, J.T., Derivation of Integral Equations in Elastic-ity, Journal of Engineering Mechanics Division, ASCE, Vol. 114, No.6,pp.1028-1044, 1988.
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X
Boundary Elements 389
3. Hong, H.-K., and Chen, J.T., Generality and Special Cases of DualIntegral Equations of Elasticity, Journal of CSME, Vol.9, No.l, pp.1-9,1988.
4. Chen, J.T., and Hong, H.-K., Boundary Element Method, Second ed.,New World Press, Taipei, Taiwan, 1992(in Chinese).
5. Gray, L.J., Boundary Element Method for Regions with Thin InternalCavities, Engineering Analysis with Boundary Elements, Vol.6, No.4,pp.180-184, 1989.
6. Martin, P.A., Rizzo, F.J., and Gonsalves, I.R., On Hypersingular Inte-gral Equations for Certain Problems in Mechanics, Mech. Res. Com-mun., Vol.16, No.2, pp.65-71, 1989.
7. Kaya, A.C., and Erdogan, F., On the Solution of Integral Equationswith Strongly Singular Kernels, Quart. Appl. Math., Vol.XLV, No.l,pp.105-122, 1987.
8. Portela, A., Aliabadi, M.H., and Rooke, D.P., The Dual Boundary El-ement Method: Effective Implementation for Crack Problems, Int. J.Num. Meth. Engr., Vol.33, pp.1269-1287, 1992.
9. Martha, L.F., Gray, L.J., and Ingraffea, A.R., Three-dimensional Frac-ture Simulation with a Single Domain, Direct Boundary Element For-mulation, Int. J. Num. Meth. Eng., Vol.35, pp.1907-1921, 1992.
10. Hadamard, J., Lectures on Cauchy's Problem in Linear Partial Differ-ential Equations, Dover, New York, 1952.
11. Mangier, K.W., Improper Integrals in Theoretical Aerodynamics, RAEReport, No.2424, London, 1951.
12. Koller, M.G., Bonnet, M., and Madariaga, R., Modelling of DynamicCrack Propagation Using Time-Domain Boundary Integral Equations,Wave Motion, Vol.16, pp.339-366, 1992.
13. Zhang, C., and Archenbach, J.D., A New Boundary Integral Formulationfor Elastostatics and Elastodynamic Crack Analysis, J. App. Mech.,Vol.56, pp.284-290, 1989.
14. Chen, J.T., and Chyuan, S.W., Comparisons of Analytical Solution andMSC/NASTRAN Results on Multi-support Motion of Long Bridge Dur-ing Earthquake, Proceedings of the International Conference on Compu-tational Engineering Science, p.492, Hong Kong, 1992.
15. Yeh, C.S., Hong, H.-K., and Chen, J.T., The Application of Dual In-tegral Representation on the Shear Beam Subjected to Random Exci-tations, Proceedings of the 16'* National Conference on Theoretical andApplied Mechanics, pp.767-774, Keelung, Taiwan, 1992(in Chinese).
16. Hong, H.-K., Yeh, C.S., Chen, J.T., and Liou, D.Y., Active StructuralControl of Long Bridge Subjected to Multi-Support Motion Using Inte-gral Formulation, Proceedings of the First Structural Engineering Con-ference, pp.513-522, Taiwan, 1992(in Chinese).
17. Hardy, G.H., Divergent Series, Oxford Univ. Press, London, 1949.
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X
390 Boundary Elements
18. Bromwich, T.J.FA, An Introduction to the, Theory of Infinite Series,Macmilan, London, 1965.
19. Mindlin, R.D., and Goodman, L.E., Beam Vibrations with Time-Depend-ent Boundary Conditions, Journal of Applied Mechanics, ASME, Vol.17,pp.377-380, 1950.
20. Yeh, C.S., and Liaw, J. W., On the Dynamic Solutions for a Finite PorousElastic Saturated Body, Proceedings of the 15^ National Conference onTheoretical and Applied Mechanics, pp.1247-1252, Tainan, Taiwan, 1991.
21. Tsaur, D.H., Chyuan, S.W., and Chen, J.T., On the Accuracy of MSC/NASTRAN Response of Two-Span Beams to Spatially Varying SeismicExcitation, Proceedings of MSC'/NASTRAN Fourth Annual User's Con-ference, p.(9)1, Taipei, Taiwan, 1992.
22. Loh, C.H., Penzien, J., and Tsai, Y.B., Engineering Analysis of SMART-1 Array Accelerograms, Earthquake Engineering and Structural Dynam-ics, Vol.10, pp.575-591, 1982.
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X
Boundary Elements 391
o U, d.of. with support@ Ui d.of. without support
a = 12.5
fi = 0.0
p = 2000 kg/m*
G = 33800000
a(t) = e-°-"si
displacement profile at t = 1 sec
0.4
0.2
-0.2
-0.4
. quasi-static
Cesaro sum
. Stokes' transformation
, Gibbs phenomenon
10 15 20 25 30
shear strain profile at t = 1 sec
30Fig.l The site responses of displacement and shear strain due to the SH
wave radiated by bed rock motion
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X
392 Boundary Elements
o
<D
mode
imuppor/ed
supported d.of.
undeformed shape
/ mode/ reccf/or? /"or mode /at support j
modj/ pjrf/c/p(7//o/7 r jcfor /"or mode /
mode mode J
J
elements
mode
Fig.2 The physical meaning of the modal participation factor of supportmotion
Table 1. Comparison of modal participation factors by quasi-static and Betti's methods
r*r^r*r<
continuousexact1.566
-0.8670.509
-0.364
discrete(40 elements)quasi-static method (-&MU)
1.569-0.8680.509
-0.364
Betti's method (V/w?)1.568
-0.8680.509
-0.364
Transactions on Modelling and Simulation vol 2, © 1993 WIT Press, www.witpress.com, ISSN 1743-355X





![[04330] - Vibration Problems in Structures Practical Guidelines - Practical Guidelines](https://img.pdfslide.net/doc/110x75/55cf8c595503462b138ba964/04330-vibration-problems-in-structures-practical-guidelines-practical.jpg)























