Embed Size (px)
Citation preview

1931The Journal of Experimental Biology 198, 1931–1942 (1995)Printed in Great Britain © The Company of Biologists Limited 1995
BALLISTICS AND VISUAL TARGETING IN FLEA-BEETLES (ALTICINAE)
JOHN BRACKENBURY AND RICHARD WANGDepartment of Anatomy, Downing Street, Cambridge, CB2 3DY, UK
Accepted 5 May 1995
The kinematics of jumping was measured in sevenspecies of flea-beetle (Alticinae). The accuracy of twospecies during targeted jumping was also investigated.Take-off accelerations ranged from 15 to 270 times gravity.Rotational energy accounted for 4–21 % of the totaltranslational energy. Two species were able to control jumpdirection and landing. When presented with a high-contrast optical grid, Chalcoides aurata exhibited twoalternative jump modes. In mode 1 or wingless jumping,the body rotated continuously, the insect rarely landed onits feet and no discrimination was shown between landingon the black or white stripes of the grid. In mode 2jumping, recruitment of the wings eliminated rotation andvirtually ensured a feet-first landing; there was also asignificant preference for jumping towards the blackstripes. Aphthona atrocaerulea could alter take-off angle in
order to strike targets at inclinations of 0–90 ˚ to thehorizontal. Targets consisting of a white illuminated crosson a black background were struck with equal accuracy,regardless of distance (within the normal jumping range).The beetle aimed specifically for the centre of the targetand not for the high-contrast boundary. The distributionof hits about the target centre was radially symmetrical.Although take-off was wingless, rotation could be abolishedin mid jump, within 10 ms, by extending the wings. Thisvirtually guaranteed a feet-first landing. Targetingaccuracy is discussed in the context of biomechanicalsteering mechanisms and visual control.
Key words: jumping, kinematics, vision, control, flea-beetle,Chalcoides aurata, Aphthona atrocaerulea.
Summary
Small leaping insects such as fleas (Bennet-Clark and Lucey,1967), springtails (Christian, 1978, 1979; Brackenbury andHunt, 1993) and the larvae of the tephritid fly Ceratitis capitata(Maitland, 1992) rely on a spring mechanism to achieve highaccelerations over very short take-off distances. Catapultmechanisms are also used by click-beetles (Evans, 1972, 1973;Kaschek, 1984) and locusts (Bennet-Clark, 1975). SaltatorialOrthoptera exercise considerable control over the range anddirection of jumping; locusts, grasshoppers and wood crickets,for example, estimate target distance using ‘peering’movements of the head (Wallace, 1959; Collett, 1978;Eriksson, 1980; Goulet et al. 1981), and locusts match rangeto estimated target distance by altering take-off velocity(Sobel, 1990). Mantids frequently recruit the wings whilstjumping (Brackenbury, 1991), possibly to help in control. Bycontrast with these relatively large insects, little is known aboutthe control of leaping in very small ‘explosive’ jumpers whosereliance on an ‘all-or-none’ catapult mechanism would beincompatible with a velocity control system. Springtails, click-beetles, tephritid fly larvae and bristle-tails (Evans, 1975) allspin through the air while jumping, and springtails show nostatistical preference for landing on their heads or their tails(Christian, 1978).
The available evidence, therefore, might seem to suggest
Introduction
that leaping in small insects is little more than a high-speedescape reflex, with no time for controlled manoeuvre. Flea-beetles provide a test case for this hypothesis since, althoughtheir jumping is based on a metafemoral spring (Ker, 1977;Furth, 1982; Furth et al. 1983), most species are fully wingedand hence are potentially capable of briefly recruiting thewings to influence jump kinematics. The objectives of thepresent investigation were threefold. First, to investigate theenergetics and kinematics of flea-beetles. Second, to search forevidence of control over jump direction and/or landingcapability. And third, to quantify such control in a way thatprovides information on the optokinetic capabilities of theseinsects.
Materials and methodsThe experiments were carried out on seven species of flea-
beetle (Alticinae) which are listed, together with the host plantsfrom which they were collected, in Table 1. Jumpingbehaviour was investigated with the help of a NAC 400 high-speed video (HSV) system, which was supplied with a manualframe-by-frame replay facility. Illumination was provided bya slave-driven stroboscope producing 400 synchronised flashesper second, each of 20 ms duration. To achieve maximum depth

1932 J. BRACKENBURY AND R. WANG
Table 1. Morphometric and kinematic parameters of leaping beetles
Aphthona Psylliodes Longitarsus Psylliodes Chalcoides Podagrica atrocaerulea* affinis gracilis dulcamarae aurata† fuscicornis Altica lythri
Host plant Low herbage Solanum Senecio Solanum Salix sp. Malva Epilobium dulcamara jacobaea dulcamara sylvestris hirsutum
Mass (mg) 0.64±0.03 (6) 1.28±0.08 (5) 2.75±0.10 (5) 6.11±0.35 (6) 2.70±NA (19) 5.94±0.08 (5) 12.16±0.60 (6)Body length (mm) 1.70±0.03 (6) 2.23±0.04 (6) 3.00±0.02 (6) 3.33±0.08 (6) 2.90±0.06 (5) 3.78±0.20 (6) 4.90±0.10 (6)Body width (mm) 0.90±0.02 (6) 1.10±0.03 (6) 1.46±0.05 (6) 1.85±0.06 (6) 2.03±0.05 (5) 1.90±0.10 (6) 2.08±0.10 (6)Femur length (mm) 0.66±0.01 (7) 0.88±0.01 (6) 1.03±0.03 (6) 1.36±0.01 (6) 0.90±0.02 (4) 1.06±0.01 (6) 1.53±0.01 (6)Femur width (mm) 0.30±0.01 (7) 0.51±0.01 (6) 0.48±0.03 (6) 0.80±0.11 (6) 0.35±0.01 (4) 0.44±0.01 (6) 0.56±0.01 (6)Tibia length (mm) 0.62±0.02 (7) 0.74±0.01 (6) 0.88±0.02 (6) 1.10±0.02 (6) 0.65±0.02 (4) 1.01±0.04 (6) 1.42±0.03 (6)
Femur width/femur 0.45 0.58 0.47 0.59 0.39 0.42 0.37length
Femur width/body 0.33 0.46 0.33 0.43 0.17 0.23 0.26width
Take-off angle 14±1 (31) NA 72±2 (29) 54±2 (28) 51±2 (12) 53±2 (17) 54±2 (21)(degrees)
Take-off velocity 1.7±0.3 (31) 2.93±0.02 (49) 2.70±0.30 (32) 2.34±0.04 (50) 0.83±0.04 (9) 0.72±0.03 (23) 0.75±0.04 (10)(m s−1)
Rotation rate (Hz) 66±5 (48) 187±11 (9) 73±7 (25) 50±7 (25) 35±2 (35) 31±1 (19) 21±1 (32)Take-off time (ms) 1.5 1.1 1.4 2.1 3.6 5.8 7.7Take-off distance (mm) 1.3 1.6 1.9 2.5 1.6 2.1 2.9Acceleration (m s−2) 1.13×103 2.66×103 1.93×103 1.1×103 0.25×103 0.12×103 0.10×103
Translational energy 0.92 (96 %) 5.49 (84 %) 10.02 (94 %) 16.73 (95 %) 0.93 (85 %) 1.50 (79 %) 3.40 (85 %)(mJ)
Rotational energy (mJ) 0.04 (4 %) 1.06 (16 %) 0.65 (6 %) 0.87 (5 %) 0.16 (15 %) 0.40 (21 %) 0.59 (15 %)
*Refers to initial or wingless phase of jumping.†Refers to mode 1 or wingless jumping.NA, not available; the value is the mean mass of 19 individuals weighed together.Values are means ± S.E.M. (N).Translational and rotational energies are also expressed as percentages of total energy (in parentheses).
of focus, at the relatively high image magnifications that werenecessary in the experiments, the iris diaphragm of the videocamera lens was stopped down to f16g–f22g. This placedgreat demands on the light intensity requirement, so the insectswere viewed in silhouette directly against the stroboscope face,after covering it with three layers of translucent tracing paperto disperse the light (Fig. 1A). At the start of each trial, theinsect was introduced onto a slender twig held between thecamera and the illuminated screen at an angle of approximately45 ˚. Normally the insect quickly began to climb towards thehighest point of the twig, which was the terminal bud, and thisprovided time for the experimenter to align the body of thebeetle with the centre of the screen and the optical axis of thelens (Fig. 1A). In specific cases described below, some beetlesdeliberately orientated towards the screen, in which case thesmooth rounded surface of the terminal bud was important infacilitating these movements and in providing an exact footingfor take-off. However, the individuals of most species jumpedin a random direction once they had reached the terminal bud,either spontaneously or after gentle prompting by the tip of asecond twig held by the experimenter.
Take-off angle and take-off velocity in these species were
determined from jumps whose trajectories lay at right anglesto the axis of the camera lens. Aphthona atrocaerulea andChalcoides aurata leapt directly towards the light source, inline with the axis of the camera lens, and take-off angle (u) andtake-off velocity (V) were determined as follows. The jumptrajectories were parabolic and the following geometricalequations therefore hold:
u = tan21(gt/Vx) , (1)
V = Vx/cosu , (2)
where g is the acceleration due to gravity, t is the time fromlaunch to vertex height and Vx the horizontal component ofvelocity, which remains constant. With the camera placedbehind the take-off point and directly in line with the trajectoryas shown in Fig. 1A, the time to vertex height (highest pointof the trajectory at mid-range) and Vx (measured horizontaltarget distance divided by jump time from launch to targetimpact) were determined directly. As a check on the accuracyof this method, a separate series of measurements was madeon A. atrocaerulea with the camera placed directly to the sideof the trajectory.

1933Visual targeting in flea-beetles
B
A
x-axis
+28
+21
+14
−28
−28
−21 −14−14
−21
+14 +21 +28
y-axis
Angular distance fromgeometric target centre
Stroboscope
Target
BeetleCamera
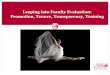
Fig. 1. (A) Method used for measuring targeting accuracy in leapingAphthona atrocaerulea beetles. The target consisted of a cross cut outof black card and mounted vertically onto the face of a stroboscopelamp, the ouput of which was synchronised to a high-speed videocamera. The beetle was presented on a twig held at a measureddistance from the target. The video camera recorded the silhouette ofthe beetle from behind as it leapt towards the target. (B) For dataanalysis, the target was subdivided into equal-sized zones along thehorizontal and vertical arms of the cross, and hit scores were countedin each first along one axis then along the other. Differently sizedtargets were presented at different distances from the launch point,but in each case the angular dimensions were preserved; the anglesubtended by the central square of the cross was 14 ˚. The dot nearthe middle of the cross lies within a solid angle of 1 ˚ of the geometrictarget centre and marks the average coordinates of all hits recordedduring horizontal and vertical jumping.
The much more directed behaviour pattern of A.atrocaerulea and C. aurata provided an opportunity tomeasure the accuracy with which a specific target could bevisually fixated and then struck by the body. In the case of C.aurata, the target consisted of a vertical grid of black and whitestripes (Fig. 2A) painted directly onto the tracing papercovering the face of the stroboscope. The beetles were held ata distance of 8 cm from the screen, which is similar to thenormal jumping range of this species. At this distance, the barssubtended an angle of 25 ˚ to the beetle’s eyes (spatialfrequency = 0.04 cycles degree21).
A. atrocaerulea had a much greater jumping range (up to21 cm horizontally, 15–16 cm vertically) and could vary its
take-off angle to intercept targets placed at any inclinationbetween 0 and 90 ˚. This made it possible to monitor targetaccuracy in this particular species as a function of distance andinclination. In exploratory experiments, the response of A.atrocaerulea to a variety of targets of different shapes andangular sizes was examined in order to arrive at a design thatwould be small enough to elicit maximum jump accuracy fromthe beetle whilst retaining enough total luminosity to keep itsattention fixed towards the target. This optimisation processresulted in the target design shown in Fig. 1A, consisting of across cut out of black card and mounted directly onto thestroboscope screen. Four targets of different sizes were placedin separate experiments at horizontal distances of 8, 12, 16 or21 cm from the launch point. Target size was matched todistance so that all the targets subtended the same angle to thelaunch point: the angular subtense of the central square of thecross was 14 ˚. In two further series of experiments, theperformance of the insects was also tested against obliquetargets held at an angle of 60 ˚ to the horizontal and verticaltargets placed directly above the body.
In order to analyse the target hit data, the cross was dividedinto equal-sized zones along the horizontal (x-axis) and vertical(y-axis) arms (Fig. 1B). Zonal scoring was carried outindependently along the x- and y-axes in order to comparehorizontal and vertical target accuracies.
Kinetic energies Ek (J) were calculated as follows:
Translational Ek = mV2/2 , (3)
where m is the body mass in kg and V the take-off velocity inm s21, and:
Rotational Ek = I(2pn)2/2 , (4)
where I is the moment of inertia and n the rotation rate of thebody. I was estimated by assuming that the body was anellipsoid of revolution with axes a (body length) and b (bodywidth):
I = 0.2m(a2 + b2) . (5)
All data are expressed as mean values ± 1 S.E.M. Paired valueswere compared, where appropriate, using the Student’s t-test(Pø0.05).
ResultsMorphometrics and kinematics
Morphometric and kinematic data for all seven species ofbeetle are listed in Table 1. The measured values of take-offangle and take-off velocity obtained in A. atrocaerulea usingthe indirect method (column 1, Table 1) were not significantlydifferent from those resulting from the direct method (take-offangle 16±1 ˚, N=20; take-off velocity 1.8±0.1 m s21, N=28).Take-off distance was assumed to be equal to the combinedlength of the femur plus the tibia, since videographic datashowed that the hind-leg was almost fully extended at take-off,but that the tarsus remained in contact with the groundthroughout its length and therefore made no contribution totake-off distance (Fig. 3). The role of the tarsus appears to be

1934 J. BRACKENBURY AND R. WANG
6.4±1.1 ° (N=25)
B
A
21.6±0.9 ° (N=28)
fW=118.5±1.2 Hz (N=49)
aE=87.8 °
aHW=145.1 °
70.6±1.1 ° (N=32)
28.5±1.5 ° (N=27)
Dh1
Dh2
2
1
Mode 1: V=0.83±0.04 m s−1 (N=9)
Mode 2: V=0.89±0.02 m s−1 (N=32)
Dh1=−1.47±0.02 cm (N=9)
Dh2=6.37±0.03 cm (N=98)
Fig. 2. (A) Kinematics of Chalcoides aurata leapingtowards an optical grid of equal-sized black and whitestripes mounted directly onto the stroboscope. Jumpmode 1 is wingless; the body spins towards the target,finally hitting it slightly below the level of the launchpoint. Jump mode 2 is wing-assisted; the body travelswithout spinning and gains height by the time it reachesthe target. The inset shows a front view of the target. Thedrawing is not to scale. V, take-off velocity; Dh1, Dh2,height gain during jump. See text for further explanationof calculations. (B) Schematic front view of flying beetleshowing elytral and hind-wing angles during the stroke.Note that the elytra (black) beat in phase with the hind-wings (white) but through a smaller stroke angle. fW,wingbeat frequency; aE, aHW, stroke angles of elytra andhind-wings respectively.
£
£¢
¢
to prevent slippage, rather than to add to the lever arm of theelongating leg. Take-off time was calculated as twice the take-off distance divided by take-off velocity. Take-off accelerationwas calculated as take-off velocity divided by take-off time. Adistinction can be made on the basis of take-off time,acceleration and velocity between the four flea-beetles on theleft-hand side of Table 1, which may be described as ‘high-speed’ jumpers, and the remaining three on the right-hand side,
which are ‘low-speed’ jumpers. The chosen morphometricindicators (femur width/femur length) and (femur width/bodywidth) also divide along this line. Insufficient species areavailable to justify any attempt at a rigorous statisticalcorrelation, but the available data suggest a clear link betweenfemur width and power capability.
All species rotated during the leap, almost always in abackward or ‘head-over-heels’ direction. The highest rotation

1935Visual targeting in flea-beetles
A B
C D
Fig. 3. Video images of consecutive stages in the take-off of Chalcoides aurata during flight-assisted jumping. (A) All feet are in contact with thesubstratum and the elytra are closed. (B) Start of jump procedure. The fore-legs have been raised from the surface and the elytra are beginning tobe elevated, exposing the hind-wing which is still folded at the costal hinge. (C) The elytra have rotated forwards and the tips of the hind-wingsare beginning to extend. (D) Push-off. The wings are fully extended and pronated in preparation for the downstroke, and the hind-legs are halfwaythrough their extension. Note that the tarsus remains in contact with the substratum over its whole length and does not contribute to the take-offdistance. The time required to extend the hind-wings fully, from the beginning of wing opening, was 14.03±0.6 ms (N=41). Scale bar, 2 mm.
rate of 187 cycles s21 (Hz) coincided with the highest take-offacceleration and velocity, and the shortest take-off time, inPsylliodes affinis. Rapid rotation did not always imply high
energy wastage. With the exception of P. affinis, the high-speedjumpers, despite their faster rotation rates, expended relativelyless kinetic energy in this form than the low-speed jumpers.

1936 J. BRACKENBURY AND R. WANG
B
A5
4
3
2
1
0
5
4
3
2
1
0
Hit
dens
ity (
% c
ount
s pe
r de
gree
)
8 cm
x, N=85
y, N=108
16 cm
x, N=126
y, N=98
21 cm
x, N=104
y, N=129
12 cmx, N=147y, N=156
−21 −14 −7 0 +7 +14 +21 −21 −14 −7 0 +7 +14 +21
−0.7 ° +5.0 ° +0.4 °
+1.0 °
−4.0 ° +0.3 °+0.7 ° +1.2 °
Angular distance from target centre (degrees)
5
4
3
2
1
0
5
4
3
2
1
0
8 cm
x, N=108
y, N=101
16 cm
x, N=71
y, N=79
12 cmx, N=102y, N=110
−21 −14 −7 0 +7 +14 +21
−1.0 ° +1.0 ° +2.1 ° +2.3 °
+1.4 ° +3.5 °
Fig. 4A,B

1937Visual targeting in flea-beetles
5
4
3
2
1
0
12 cm
x, N=82
y, N=142
16 cm
x, N=70
y, N=119
−21 −14 −7 0 +7 +14 +21 −21 −14 −7 0 +7 +14 +21
−6.0 ° +0.4 °−2.8 ° +0.4 °
C
Hit
dens
ity (
% c
ount
s pe
r de
gree
)Angular distance from target centre (degrees)
Fig. 4. Distribution of hits against targetspresented at different distances directly infront of (A), directly above (B) or at anangle of 60 ˚ to the horizontal (C). In thelatter case, the stroboscope, carrying thetarget on its front surface, was inclineddownwards towards the beetle at an angleof 60 ˚. Each data point represents the hitsscored within a particular zone expressedas a percentage of the total hits (N)measured in all zones along the x-axis(filled circles) or y-axis (open circles).Arrows on the baseline indicate the averagecoordinates of the full set of hits recordedagainst each target.
Table 2. Targeting performance of Chalcoides aurata leapingtowards the optical grid shown in Fig. 2
Jump mode 1 Jump mode 2
Number of beetles landing feet- 14 (10 %) 170 (95 %)first on target
Number of beetles bouncing 127 (90 %) 10 (5 %)off target
Total number of trials 141 (100 %) 180 (100 %)Hits against black stripes 66 (47 %) 99* (55 %)Hits against white stripes 56 (40 %) 62* (35 %)Hits against black/white 19 (13 %) 19 (10 %)
boundary
*Significantly different from each other (x2-test, P>0.05).Percentages of total jumps given in parentheses.
Jump performance of Chalcoides aurata
C. aurata exhibited two different modes of jumping whenconfronted with the optical grid. In jump mode 1, which waswingless, the body spun through the air towards the target at35 Hz. Wingless jumping was also characteristic of all the otherbeetles except A. atrocaerulea. In the second jump mode, thewings were opened approximately 50 ms before take-off andwithin this period performed two or three strokes of graduallyincreasing amplitude. Immediately prior to wing activity, thelegs were shuffled in a very deliberate attempt to obtain properbalance and orientation. The take-off sequence would only beattempted once the prothoracic legs had been finally raisedabove the ground and extended forward into the air (Fig. 3). In21 out of 24 cases examined in detail, final extension of thehind-legs coincided with the downstroke rather than with theupstroke phase of the wing beat.
Take-off angle during mode 2 jumping (50.7±1.6 ˚, N=12)was marginally greater than during mode 1 jumping(46.7±0.8 ˚, N=47) but take-off velocity was not significantlydifferent (0.89±0.02 m s21, N=32, mode 2; 0.83±0.04 m s21,N=9, mode 1).
Wing recruitment had clear repercussions on jumpkinematics. First, the wings had the effect of counteracting thepitching instability that was present from the moment of take-off in wingless jumping and, as a result, the jump becamerotation-free. Second, the jump trajectory was altered so thatthe body gained a height of 0.078 m over the target distancecompared with wingless jumping (Fig. 2A). The travel time tothe target was 0.176±0.01 s (N=198), so the rate of potentialenergy gain by the body was equivalent to 0.078mg/0.176 J s21. The take-off time was 0.0036 s; therefore, the take-off power was equivalent to 0.5mV2/0.0036. The ratio of thepotential energy gain to the take-off power gives an estimateof the relative contribution of the wings and the legs to thetake-off effort: the resultant figure is less than 5 %. Althoughthe calculation takes no account of possible changes in forwardvelocity due to wing activity, the contribution of these changesto the mechanical energy of the body during flight-assistedjumping is negligible compared with the gain in potentialenergy by increased height. It is therefore reasonable to
conclude that wing effort contributes little or nothing to take-off momentum. This result is also compatible with theobservation that take-off velocity is unaffected by wingrecruitment.
Fig. 2B shows the wing-beat characteristics during mode 2jumping. The most noticeable feature was that the elytra beatin phase with the hind-wings, with a stroke angle of nearly 90 ˚.
The choice of jump mode also affected targeting and landing(Table 2). As a result of rotation, only 10 % of all winglessjumps terminated in a feet-first landing on target. This figurerose to 95 % during flight-assisted jumping. Wingless jumpingwas also significantly less discriminating: black and whitestripes were struck with equal likelihood. In contrast, beetlesleaping towards the optical grid after wing recruitment showeda significant preference for landing on the black stripes.
Targeting performance of A. atrocaerulea
Hit density distributions for targets placed horizontally,vertically or obliquely with respect to the body are shown inFig. 4A–C respectively. Each of these graphs shows the hitscores that were measured independently along the x- and y-axes of the target. The results for horizontal and verticaljumping are almost identical: regardless of jump distance, the

1938 J. BRACKENBURY AND R. WANG
Fig. 5. Summarised datafrom all seven experimentsshown in Fig. 4A,B (curvei, solid line). Bars indicate±1 S.E.M. Filled arrowsindicate the angle withinwhich 50 % of the hits fell,as measured along the x- or y-axis. This angle wasobtained by graphicalintegration of the axial hitdensity curve. Dashedcurve ii was obtained bymultiplying each value onthe axial hit density curveby the corresponding valueof f, the angular distancefrom the target centre. Itrepresents the distributionof hits within successive 1 ˚ wide circular stripsmeasured from the centreto the edge of the target.Dashed curve iii representsthe distribution of hitsupon the target as afunction of solid angulardistance from the target centre and was obtained by graphical integration of curve ii. The open-headed arrows on the baseline indicate the solidangle within which the central 50 % of all recorded hits were located.
5
4
3
2
1
0−21 −14 −7 0 +7 +14 +21
d x-axis (N=748)
s y-axis (N=776)
Axi
al h
it de
nsity
(%
cou
nts
per
degr
ee)
Angular distance from target centre (degrees)
Cum
ulat
ive
hits
(%
tot
al)
Con
cent
ric
hit
dens
ity
(% c
ount
s pe
r de
gree
)
100
0
2
450
0
6i
ii
iii
22 °
12 °
hit density distribution is the same along the vertical and thehorizontal axes. Fig. 4 also shows the mean x,y-coordinates forall recorded hits against each target. This gives an independentestimate of the ‘perceived’ or ‘apparent’ target centre, since itis the point towards which the jumps appear to be directed. Ifthe jumps were perfectly distributed about the geometric targetcentre, the mean coordinates would be zero along both the x-and the y-axes. In all cases, the perceived target centre laywithin 5 ˚ of the true geometric centre.
The data in Fig. 4A,B suggest that a target is struck with thesame accuracy regardless of its distance (so long as it is withinrange) or whether it is located directly above or in front of theflea-beetle. Moreover, accuracy is the same whether it ismeasured along the vertical or horizontal axis of the target. Inview of the similarities between the hit density distributionsshown in Fig. 4A,B and in order to obtain a more precisequantification of ‘target accuracy’, the data from all sevenseries of experiments are aggregated in Fig. 5. The summeddata confirm that there is no significant difference in thedistribution of hits along the horizontal and vertical axes.Furthermore, the average value of all the recorded hits lieswithin a solid angle of 1 ˚ of the geometric target centre(Fig. 1B).
Fig. 5 shows two further measures of target hit distribution.The first (‘concentric hits’) is the distribution of hits withinindividual concentric, 1 ˚ wide circular bands of the target.These are the equivalent of the successive black and whitecircles of an archery target. The concentric hit frequency values
were obtained by multiplying each axial value (hits per degree)by its angular distance from the centre (f). Finally, thecumulative hit frequency distribution, also shown in Fig. 5,measures the proportion of total hits lying within any solidangle f of the target centre. This was obtained by graphicalintegration of the concentric hit frequency distribution curve,from the centre to the edge of the target area.
The axial hit density curve and the cumulative hit frequencycurve were used to quantify target accuracy as the angle,measured with respect to the target centre, within which 50 %of the recorded hits were located. If the angle is measuredalong an axis (x or y), its value is equal to the angle thatencloses the central 50 % of the area lying beneath the axial hitdensity curve. From Fig. 5, the axial target accuracy measuredin this way is ±6 ˚. The advantage of this method of measuringtarget accuracy is that it directly reflects the precision withwhich the target is perceived by the eye, as will be seen in theDiscussion. However, a more precise gauge of the accuracywith which the task of hitting the target is carried out by thebeetle is based on the two-dimensional distribution of hitsacross the target area. In these terms, accuracy can be definedas the solid angle enclosing the central 50 % of all recordedhits. This is obtained by downward projection from thecumulative hit frequency curve in Fig. 5, and its value is ±11 ˚.
When jumping towards the target inclined at 60 ˚ to thehorizontal, accuracy noticeably deteriorated. In particular, thedistribution of hits along the vertical axis was skeweddownwards (Fig. 4C), implying that, although the beetles were

1939Visual targeting in flea-beetles
BA100
80
60
40
20
0
% B
eetle
s la
ndin
g on
fee
t, d
% B
eetle
s w
ith w
ings
ope
n, s
% B
eetle
s w
ith w
ings
bea
ting,
h
60
40
20
0
0 5 10 15 20 0 5 10 15 20
37
150
N=47 N=94
100
110
Target distance (cm)
Target infront
Targetabove
Fig. 6. Kinematics and landingperformance of A. atrocaeruleajumping towards targets presentedat different distances either directlyin front of (A) or directly above (B)the body. In the latter case, thestroboscope, with the targetattached to its front surface (Fig. 1),was held facing down, directlyabove the position of the beetle. Thetotal number of experiments carriedout at each distance is given besidethe data points.
still aiming towards the centre of the target, they were fallingshort of it. The achievement of both height and range wasevidently incompatible with the mechanical energy availableat take-off.
The landing success of A. atrocaerulea like that of C. auratawas strongly influenced by the behaviour of the wings. A.atrocaerulea invariably took off in a wingless mode and forthe first 40 ms or so of travel time it rotated through the air ata rate of 66 Hz. This was, coincidentally, roughly the sameamount of time that was needed to cover the distance to thenearest (8 cm) target. From this point, the wings began to open,the exact timing varying from jump to jump. By 100 ms oftravel time, close to the end of a normal full-length jump,virtually all the beetles had opened their wings. There was adirect correlation between the timing of wing opening and theability to make a feet-first landing on target (Fig. 6). Whereasnone of the beetles made a feet-first landing on the 8 cmhorizontal target, virtually all landed feet-first on the 16 cmhorizontal target. The time lag between the landing successcurve and the wing-opening curve in Fig. 6A is approximately10 ms. This implies that, within 10 ms of beginning to open itswings, the chances of any individual making a feet-first landingincrease from 0 to 100 %. This deduction was confirmed by thevisible events recorded by the HSV. As soon as the wings wereextended, rotation was abolished and the body becamestabilised with its ventral side, including the feet, pointing inthe direction of the target. The same mechanical eventsoccurred during vertical jumping, with the result that the beetleapproached and landed on the target in an upside-downposition.
The wings took approximately 9.5 ms to open (mean of eightmeasurements) but a further 11.5 ms (N=70) was needed beforethey began to beat. Since the abolition of spin required only10 ms, it must be concluded that the extension of the hind-wings and elytra in itself was sufficient to counteract rotation.
In confirmation of this, many of the feet-first landings recordedduring vertical jumping were achieved whilst the wings wereextended, but had not yet begun to beat (Fig. 6B).
Landing success during vertical jumping never quiteachieved the 100 % level. Approximately 20 % of the jumpsfell short of the 16 cm target and, although the wings were openby this stage, the beetles either fell to the ground or else becamepropelled in a random direction by the wings.
DiscussionJump kinetics and energetics
The high take-off acceleration and velocity and the shorttake-off time observed in the four high-speed species arecompatible with jumping based on a spring-driven mechanism.A scroll-like spring has been identified in the flea-beetlemetafemur (Ker, 1977; Furth, 1980, 1982), connected to anapodeme into which the primary and secondary extensormuscles insert. The muscles dilate the spring, accumulatingtensional energy. According to Furth et al. (1983), the elasticmaterial of the spring is not resilin. Springs have beendescribed in fleas (Bennet-Clark and Lucey, 1967) and locusts(Bennet-Clark, 1975). They are also employed for leglessjumping in click-beetles (Evans, 1972, 1973; Kaschek, 1984),tephritid fly larvae (Maitland, 1992; Suenaaga et al. 1992),springtails (Christian, 1978, 1979; Brackenbury and Hunt,1993) and bristle-tails (Evans, 1975).
The spring used by soft-bodied springtails and fly larvae ishydroelastic and is therefore probably subjected toconsiderable damping as fluid is translocated within the bodycavity. This may account for the relatively low (<100 g, whereg=9.81 m s22) accelerations relative to gravity encountered inthese insects. Click-beetles use a much stiffer spring, to judgeby the very large accelerations (up to 450 g) reported in somespecies (Kaschek, 1984). The maximum acceleration measured

1940 J. BRACKENBURY AND R. WANG
in the present study, 270 g in the flea-beetle Psylliodes affinis,is comparable to that of the flea (245 g). In contrast, theaccelerations found in the low-speed species shown in Table 1must be viewed as being amongst the lowest of any smalljumping insect. Their femora show no obvious adaptation forsaltation and, if a metafemoral spring is present, it appears tobe very weak. Metafemoral springs are found in non-alticidbeetles, such as the curculionid Rhynchaenus fagi described byKer (1977). The take-off times of the three low-speed flea-beetles, though lengthy compared with those of the others,were nonetheless well below 10 ms, a period not incompatiblewith spring assistance. A final note in this context: femoralthickness is not always a reliable indicator of leaping prowess.Females of the European flower beetle Oedomera nobilis havenotably enlarged hind femora but, at least in the experience ofone of the authors (J.B.), they do not leap.
Spinning seems to be almost unavoidable in small leapinginsects, to judge by its occurrence in almost all the groups thathave been studied to date. In energetic terms, it is notnecessarily wasteful since it normally accounts for less than10 % of the total kinetic energy of the body. There areexceptions: the globular springtail Sminthurus viridis rotates at480 Hz and this consumes nearly 60 % of the take-off energy(Christian, 1979). Amongst jumping beetles, rotational energy(as a proportion of the total kinetic energy) was greatest in themore slowly spinning species (Table 1). This is notparadoxical: equation 4 shows that rotational energy (per unitbody mass) scales to the square of the linear dimensions of thebody, and the slowly spinning species were also the biggest. Aspherical insect with a diameter of 1 mm would need to spinfour times as fast as one with a diameter of 2 mm to dissipatethe same proportion of its kinetic energy.
Biomechanics and steering mechanisms
The present study demonstrates that, at least in two species,jumping in flea-beetles is a directed behaviour pattern and notjust a randomised high-speed escape reaction. To elicit thisbehaviour, the insect seems to need a stimulus that it canperceive and to which it is attracted. It is beyond the scope ofthe present study to try to explain which particular attributesof target design proved effective in this respect and how theywere perceived by the flea-beetles, except on a very generalbasis, as will be seen below. One of the objectives was toinvestigate any link that might exist between biomechanicalperformance and steering behaviour, and in this area evidencehas been forthcoming. The ability of C. aurata to discriminatein its locomotory behaviour between the black and whitestripes of an optical grid was predicated upon the adoption ofa jumping mode that specifically excluded spinning andmaximised landing probability. But this mode also imposes adelay in take-off of at least 50 ms: increased control, andlanding certainty, is only achieved at a cost in response time.Wingless jumping may be more expeditious, increasing thechances of escape but sacrificing landing certainty.
Flight-assisted leaping has previously been described inmantids (Brackenbury, 1991) where, as in C. aurata, the
downward sweep of the wings was found to be exactlysynchronised with hind-leg extension at take-off. This led tothe suggestion that the wings might be used to augment thethrust developed by the legs at take-off. In C. aurata at least,this was not the case: the contribution of the wings to take-offenergy was negligible compared with that released from thespring. C. aurata uses its wings primarily to increase controland possibly also to gain additional height or range in itsjumping. It is important to note that flight-assisted leaping inflea-beetles is not the same phenomenon as taking off intosustained flight. The opening and subsequent beating of thewings in A. atrocaerulea, for instance, had little if any apparenteffects on the geometry of the path through the air. However,it is also likely that C. aurata uses winged jumping in order toinitiate extended flight. This not only abolishes pitchinginstability, but also, as in the locust take-off jump (Pond,1972), enables flight speed to be attained within one bodylength.
The elimination of pitching instability in the body isdependent on an extended wing, but not necessarily a beatingwing. Evidently the sudden increase in drag on the wings asthey are extended, due to the motion of the body through theair, is sufficient to align the body in the ‘feet-forward’ position.The mechanism is similar to that operating on the feathers ofa ‘shuttlecock’ or the fins of a dart. Any further increase in dragdue to the motion of the wings themselves is, in these particularcircumstances, relatively small.
C. aurata took off either on the second (13 of 24observations) or third (8 out of 24 observations) wing-beat. Abrief, pre-flight ‘burst’ of the flight motor in this way may notbe unusual in insects. The milkweed bug Oncopeltus completestwo or three wing cycles before launching into flight (Govindand Dandy, 1972).
Visual control of leaping
The pattern of hits made by A. atrocaerulea upon the target(Figs 4, 5) demonstrates that the insect was aiming specificallyat the target centre and not at its highly contrasted edges. Inthis respect, A. atrocaerulea resembles the mantid Tenoderaaustralasiae, which also specifically directs its strike towardsthe middle of a symmetrical target (Rossel, 1980). The scatterof hits around the target centre results from two sources oferror: the first is due to target perception (sensor error); thesecond is due to the locomotory machinery (motor error). It isnot possible to disentangle these two sources of error with thedata available. However, a ‘worst-case’ estimate of theaccuracy of visual resolution of the target can be arrived at byassuming a motor error of zero. In this case, visual resolutioncan be equated to whatever value has been arrived at for targetaccuracy. Two definitions of target accuracy were used in thisstudy, based on the distribution of hits along an axis (axialresolution) or upon an area (solid angle resolution). It is theformer that reflects more explicitly the performance of thesensory mechanism. The axial hit density distribution (Fig. 5)is Gaussian in shape and, moreover, since it is identical alongthe horizontal and vertical axes it can be concluded that

1941Visual targeting in flea-beetles
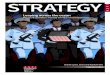
Fig. 7. Scanning electron micrograph of compound eye of Chalcoidesaurata (4803). Each eye consists of approximately 120 ommatidiawith facet diameters of approximately 15–20 mm.
targeting is radially symmetrical. This is what would beexpected of a visual system that had the same spatialdiscrimination in the horizontal and vertical directions.According to the 50 % criterion that we adopted, A.atrocaerulea can hit the target centre with an accuracy of ±6 ˚.This is also the ‘worst case’ visual resolution of the targetcentre. 50 % of all the ‘lines of sight’ prescribed by the eye inpreparation for jumping will fall within an angle of ±6 ˚ alongthe horizontal axis or along the vertical axis. The horizontaland vertical errors of estimation, however, are independent andmultiplicative. Consequently, although A. atrocaerulea canresolve a target with a minimum linear accuracy of ±6 ˚, only25 % (50 %350 %) of its prescribed lines of sight will actuallyfall within a two-dimensional square measuring 12 ˚312 ˚.This explains why the ‘solid angle’ target resolution estimatedfrom the data given in Fig. 5 was not ±6 ˚, but much larger at±11 ˚.
Target resolution is used here as a non-specific term and itis not meant to be synonymous with visual acuity (spatialacuity), which measures the ability of the visual system todiscriminate adjacent points in space. There may be methodsof visual resolution of the target available to flea-beetles whichare not directly based on visual acuity; for example, orientatingthe body towards the target so that each eye receives the samelevel of illumination. In this case, the ‘line of sight’ accuracyprescribed by the visual system would depend on the accuracywith which variations in light intensity could be mapped acrossthe target.
Spatial acuity has been measured in one species of beetle,the dung beetle Onitis aygulus (Warrant et al. 1990). Dungbeetles have a relatively complex eye and the value for spatialacuity given by these authors (0.25 cycles degree21) is likelyto be much greater than that of the much simpler eye of flea-beetles. Tiny beetles in general possess acone eyes with verysmall facets: both of these are features that limit spatialresolution and light-collecting capability (Caveney, 1986). Thepaucity of ommatidia in the flea-beetle eye (Fig. 7) suggeststhat the spatial acuity of its visual system may be less than themeasured value of target resolution (±6 ˚). An optical systemis capable of separately resolving two points in space when:
sinf = 1.22l/D , (6)
where f is the angular separation of the points in radians, l isthe wavelength and D the lens diameter (see for exampleChapman, 1969). For a 15 mm diameter lens, such as that ofthe flea-beetle ommatidium (Fig. 7), this equation predicts aresolution of approximately 2.5 ˚ in 500 nm light. This isconsiderably better than the target resolution shown byjumping A. atrocaerulea. However, assuming that two pointscan only be resolved separately if there is an interveningunexcited receptor unit, a row of three ommatidia would berequired to locate the centre of a black–white–black array or acircular group of seven ommatidia to locate the cross patternshown in Fig. 1. Such arrays will span about 7.5 ˚ and, in thisinstance, visual acuity would indeed be less than actual targetresolution.
Spatial acuity has also been measured indirectly in freelyflying bees (Srinivasan and Lehrer, 1988). The bees weretrained to distinguish between horizontal and vertical opticalgratings placed at the end of a tunnel, towards the entrance ofwhich the bees flew. The minimum spatial acuity measured inthis fashion agreed with estimates based on the opticalcharacteristics of bee eyes. The grid used in the present studyin connection with C. aurata was designed simply todemonstrate the presence of optokinetic behaviour, rather thanaccurately to quantify such behaviour. We would expect thespatial frequency of the grid used (0.04 cycles degree21) to beconsiderably less than the actual visual acuity of this insect.Indeed, 0.04 cycles degree21 is only 10 % of the spatial acuityfound in flying bees.
In order to arrive at a minimal estimate of visual resolution,we assumed a motor error of zero, but in reality this is notlikely to be the case. The accuracy of the delivery systemduring leaping depends on the precision with which an actualtrajectory can be matched to the line of sight prescribed by theeye. This matching process, in turn, must depend critically ontake-off angle and therefore any small inaccuracies in theplacing of the feet, for example, would have a large effect ontargeting performance. Although A. atrocaerulea is probablyincapable of varying take-off velocity, it is clearly highlyflexible in its choice of take-off angle. In fact, its measured

1942 J. BRACKENBURY AND R. WANG
accuracy during ‘straight upward’ jumping was undiminishedcompared with forward jumping (Fig. 4A,B). A. atrocaeruleabenefits in its targeting behaviour from the possession of analmost linear trajectory: the vertex/height ratio of its paraboladuring horizontal jumping is only 7 %. It is arguable that onlysuch a high-speed, quasi-linear trajectory can supply theaccuracy needed for targeting, in the same way that only ahigh-velocity bullet can faithfully follow the line-of-sightprescribed by a marksman’s eye.
For similar reasons, the invariance of target accuracy withdistance (Fig. 4A,B) may be an automatic consequence of theexecution of an almost straight trajectory. Although largejumping orthopterans such as locusts, grasshoppers and woodcrickets are known to estimate distance before leaping, usingparallax information gleaned from ‘peering’ movements ofthe head (Wallace, 1959; Collett, 1978; Eriksson, 1980;Goulet et al. 1981), it does not seem to be necessary to invokesuch refinements in the case of targeted leaping in flea-beetles.
This work was supported by a grant from the BBSRC. Weare grateful for the loan of high-speed video equipment fromthe Rutherford-Appleton Laboratories, Oxfordshire, andCambridge Consultants of Cambridge. Sharon Shute of theNatural History Museum, London, carried out some of thespecies identifications.
ReferencesBENNET-CLARK, H. C. (1975). The energetics of the jump of the locust
Schistocerca gregaria. J. exp. Biol. 63, 63–83.BENNET-CLARK, H. C. AND LUCEY, E. C. A. (1967). The jump of the
flea: a study of the energetics and a model of the mechanism. J.exp. Biol. 47, 59–76.
BRACKENBURY, J. H. (1991). Wing kinematics during natural leapingin the mantids Mantis religiosa and Iris oratoria. J. Zool., Lond.223, 341–356.
BRACKENBURY, J. H. AND HUNT, H. (1993). Jumping in springtails:mechanism and dynamics. J. Zool., Lond. 229, 217–236.
CAVENEY, S. (1986). The phylogenetic significance of ommatidiumstructure in the compound eyes of polyphagan beetles. Can. J. Zool.64, 1787–1819.
CHAPMAN, R. F. (1969). The Insects: Structure and Function. London:The English Universities Press Ltd.
CHRISTIAN, VON E. (1978). The jump of springtails.Naturwissenschaften 65, 495–496.
CHRISTIAN, VON E. (1979). Der Spring der Collembolen. Zool. Jb.(allg. Zool.) 83, 457–490. (English summary).
COLLETT, T. S. (1978). Peering – a locust behaviour pattern for
obtaining motion parallax information. J. exp. Biol. 76, 237–241.
ERIKSSON, S. (1980). Movement parallax and distance perception inthe grasshopper (Phalacridium vittatum). J. exp. Biol. 86, 337–340.
EVANS, M. E. G. (1972). The jump of the click beetle (Coleoptera:Elateridae) – a preliminary study. J. Zool., Lond. 167, 319–336.
EVANS, M. E. G. (1973). The jump of the click beetle (Coleoptera:Elateridae) – energetics and mechanics. J. Zool., Lond. 169,181–194.
EVANS, M. E. G. (1975). The jump of Petrobius (Thysanura,Machilidae). J. Zool., Lond. 176, 49–65.
FURTH, D. G. (1980). Inter-generic differences in the metafemoralapodeme of flea-beetles. (Chrysomelidae: Halticinae). Syst. Ent. 5,263–271.
FURTH, D. G. (1982). The metafemoral spring of flea-beetles. Spixiana(Suppl.) 7, 11–27.
FURTH, D. G., TRAUB, W. AND HARPAZ, I. (1983). What makesBlepharida jump? A structural study of the metafemoral spring ofa flea-beetle. J. exp. Zool. 227, 43–47.
GOULET, M., CAMPAN, R. AND LAMBIN, M. (1981). The visualperception of relative distances in the wood-cricket Nemobiussylvestris. Physiol. Ent. 6, 357–367.
GOVIND, C. K. AND DANDY, J. W. T. (1972). Non-fibrillar muscles andthe start and cessation of flight in the milkweed bug Oncopeltus. J.comp. Physiol. 77, 398–417.
KASCHEK, VON N. (1984). Vergleichende untersuchungen überVerlauf and Energetik der Sprunges der Schnellkäfer (Elateridae,Coleoptera). Zool. Jb. Physiol. 88, 361–385. (English summary).
KER, R. F. (1977). Some structural and mechanical properties oflocust and beetle cuticle. DPhil thesis, University of Oxford.
MAITLAND, D. P. (1992). Locomotion by jumping in theMediterranean fruit-fly larva Ceratitis capitata. Nature 355,159–161.
POND, C. M. (1972). The initiation of flight in unrestrained locusts,Schistocerca gregaria. J. comp. Physiol. 80, 163–178.
ROSSEL, S. (1980). Foveal fixation and tracking in the praying mantis.J. comp. Physiol. 139, 307–331.
SOBEL, E. C. (1990). Locust’s use of motion parallax to measuredistance. J. comp. Physiol. A 167, 579–588.
SRINIVASAN, M. V. AND LEHRER, M. (1988). Spatial acuity ofhoneybee vision and its spectral properties. J. comp. Physiol. A162, 159–172.
SUENAAGA, H., KAMIWADA, H., TANAKA, A. AND CHISHAL, N. (1992).Difference in the timing of larval jumping behaviour of mass-rearedand newly colonized strains of the Melon fly, Dacus cucurbitaeCoquillet (Diptera: Tephritidae). Appl. Ent. Zool. 27, 177–183.
WALLACE, G. K. (1959). Visual scanning in the desert locustSchistocerca gregaria. J. exp. Biol. 36, 512–525.
WARRANT, E. J., MCINTYRE, P. D. AND CAVENEY, S. (1990).Maturation of optics and resolution in adult dung beetlesuperposition eyes. J. comp. Physiol. A 167, 817–825.