Embed Size (px)
Citation preview
Joint International Conference on IMSD
Multibody System DynamicsThe
2nd
Stuttgart, Germany
May 29 – June 1, 2012
For more informationwww.itm.uni-stuttgart.de/imsd2012
Conference Information Booklet
Supporting Organizations
Industrial Sponsors
“The University of Stuttgart is going to increase its international presence and concentrate on themes that are of central impor-tance to our future.”
Prof. Dr.-Ing. Wolfram Ressel Rector University of Stuttgart
Joint International Conference on IMSD
Multibody System DynamicsThe
2nd
Welcome to the
Conference MapsCampus Vaihingen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Siteplan of the Conference Rooms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Maps for Social EventsOld Castle in the Centre of Stuttgart . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Mercedes-Benz Museum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Zoological and Botanical Garden “Wilhelma” . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Material
Table of Content
Welcome to the Conference 5Conference Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Presentation Preparations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Steering Committee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Location of the Conference 6
This is Stuttgart, Germany 8A Little about Germany . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
The Stuttgart Region . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
University of Stuttgart 10A Research University of International Standing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Useful Information 12Tickets and Transportation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
How to Arrive at the University Campus Vaihingen . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Useful Addresses & Phone Numbers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Practical Matters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Social Program 14Registration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Welcome Reception . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Conference Reception . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Excursion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Conference Dinner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Transfer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Scientific Program 19Program Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Detailed Technical Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Tuesday, May 29, 2012 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Wednesday, May 30, 2012 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Thursday, May 31, 2012 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Friday, June 1, 2012 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34

5
Welcome to the Conference
Conference ObjectivesMultibody dynamics as an engineering discipline has become an important tool for virtual prototyping, machine design and computer aided analysis of complex articulated mechanical systems. Multi-body dynamics comprises a number of aspects, including mechanics, structural dynamics, applied mathematics, control methods and computer science, as well as mechatronics.
The purpose of the conference is to serve as a meeting point for the interna-tional multibody community. The topics of the conference include, but are not restricted to:
º Algorithms, Integration Codes and Software
º Biomechanics
º Contact and Impact Problems
º Dynamics of All Vehicles
º Dynamics of Machines and Rotating Structures
º Efficient Methods and Real-Time Ap-plications
º Flexible Multibody Systems
º Optimization, Sensitivity Analysis and Parameter Identification
º Robotics, Control and Mechatronics
º Theoretical and Computational Methods
º Other Topics
Presentation PreparationsEach conference room will be equipped with a computer running Windows 7 with Microsoft Office 2010 and Adobe Acrobat Reader. Please upload your presentation to the computer ahead of time to minimize delays. Presenters
may use their own laptops if they wish. In any case, please check your hardware and presentation ahead of time.
The time allotted for each presentation is 20 minutes. This time includes 5 min-utes for discussion, so you have 15 min-utes for the presentation itself. Please help us to run a smooth conference by beginning your presentation on time and strictly holding to the time allot-ted. Check with your Session Chairman before the beginning of your session, so he knows of your presence and can properly pronounce your name.
Steering CommitteeAn International Steering Committee supports the Second Joint International Conference on Multibody System Dy-namics. The members of the Committee are:
Jorge Ambrosio (Portugal)
Kurt Anderson (USA, ASME)
Olivier Bauchau (USA/China, ASME)
Carlo Bottasso (Italy)
Javier Cuadrado (Spain, IFToMM, Secretary)
Peter Eberhard (Germany, Chair)
Sung-Soo Kim (Korea, KSME)
Jinyang Liu (China)
John McPhee (Canada, IFToMM)
Aki Mikkola (Finland, Chairman)
Friedrich Pfeiffer (Germany, IUTAM)
Jean-Claude Samin (Belgium)
Werner Schiehlen (Germany, IFToMM, Vice-chair)
Ahmed Shabana (USA, ASME)
Yoshihiro Suda (Japan, JSME)
6
P
P
University of Stuttgart, Pfaffenwaldring 7 and 9
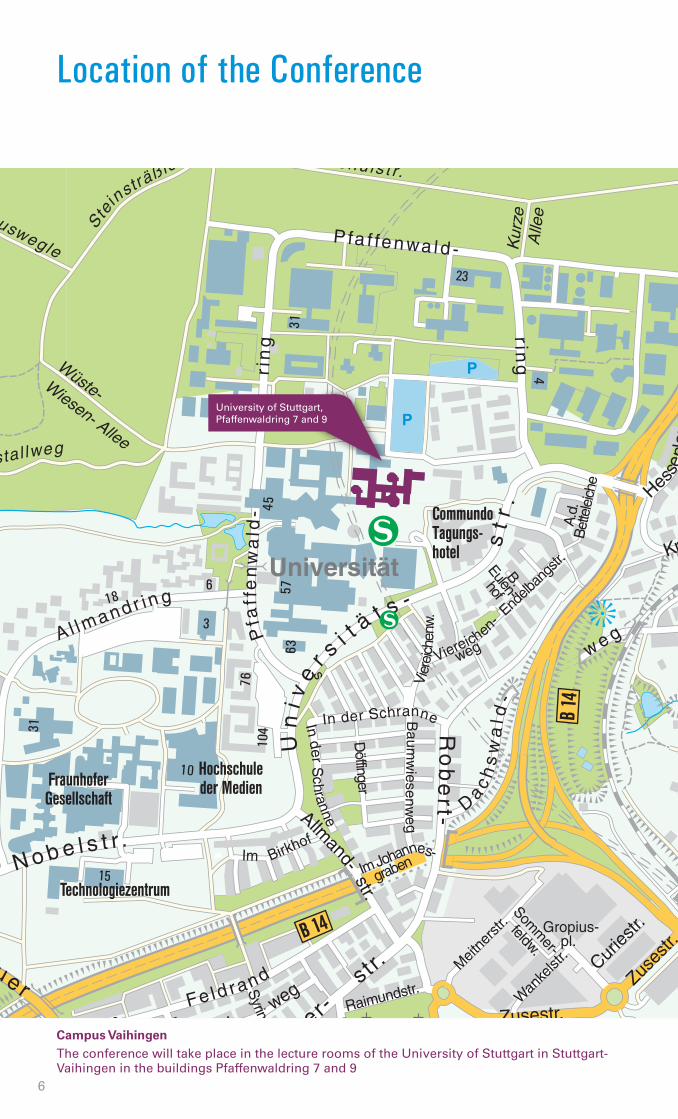
Location of the Conference
Campus VaihingenThe conference will take place in the lecture rooms of the University of Stuttgart in Stuttgart-Vaihingen in the buildings Pfaffenwaldring 7 and 9
7
To ground fl oor ofPfaffenwaldring 7
V 7.03
V 7.02
Parking
V 7.04
Commundo Tagungshotel(Lunch)
Commundo Tagungshotel(Lunch)
Main entrance
V 9.01
0.267
0.208
Cafeteria
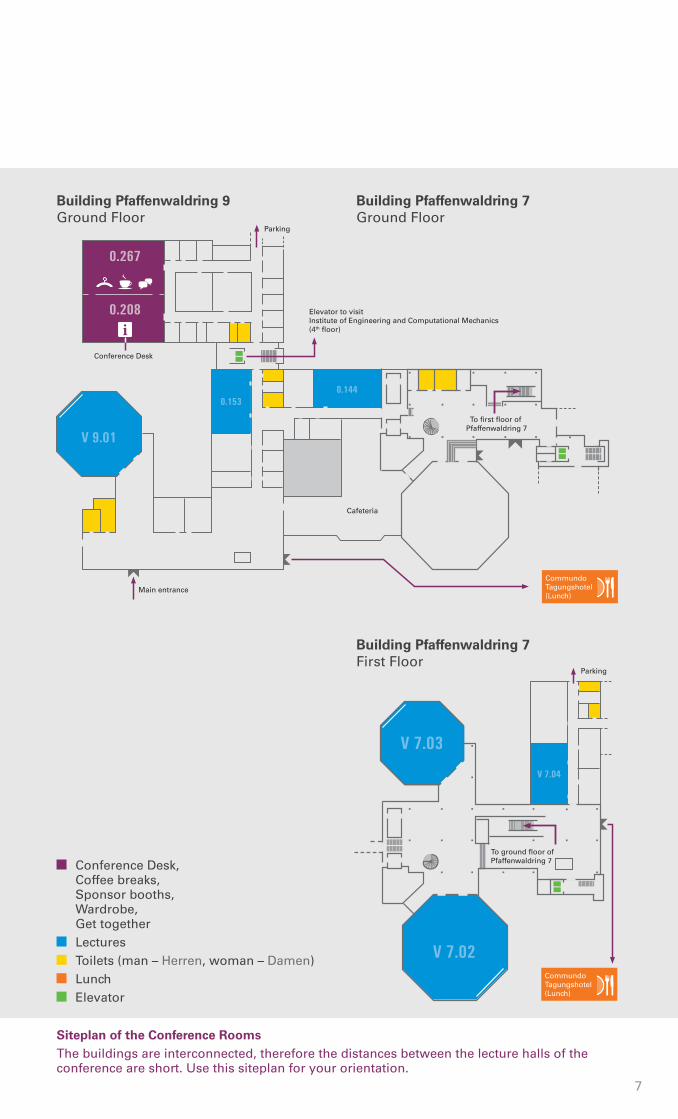
To fi rst fl oor ofPfaffenwaldring 7
0.1530.144
Elevator to visit Institute of Engineering and Computational Mechanics (4th fl oor)
Parking
Conference Desk
i
Conference Desk, Coffee breaks, Sponsor booths, Wardrobe, Get together
Lectures Toilets (man – Herren, woman – Damen) Lunch Elevator
Siteplan of the Conference RoomsThe buildings are interconnected, therefore the distances between the lecture halls of the conference are short. Use this siteplan for your orientation.
Building Pfaffenwaldring 9Ground Floor
Building Pfaffenwaldring 7Ground Floor
Building Pfaffenwaldring 7First Floor
8
This is Stuttgart, Germany
A Little about GermanyGermany, officially the Federal Republic of Germany, is a federal parliamentary republic in Europe. The country consists of 16 states while the capital and largest city is Berlin. Germany covers an area of 357 021 km2 and has a largely tem-perate seasonal climate. With 81.8 mil-lion inhabitants, it is the most populous member state and the largest economy in the European Union. It is one of the major political powers of the European continent and a technological leader in many fields.
The Stuttgart Region Inventive, cultivated, relaxing and enticing at the same time
In the Stuttgart Region nature goes hand in hand with technology, and tra-dition with innovation. Its architecture is both Baroque and modern. It spans the diversity of the pulsating economic metropolis and a wealth of culture on the highest level. And all of this is to be found amidst an idyllic, topographically appealing scenery.
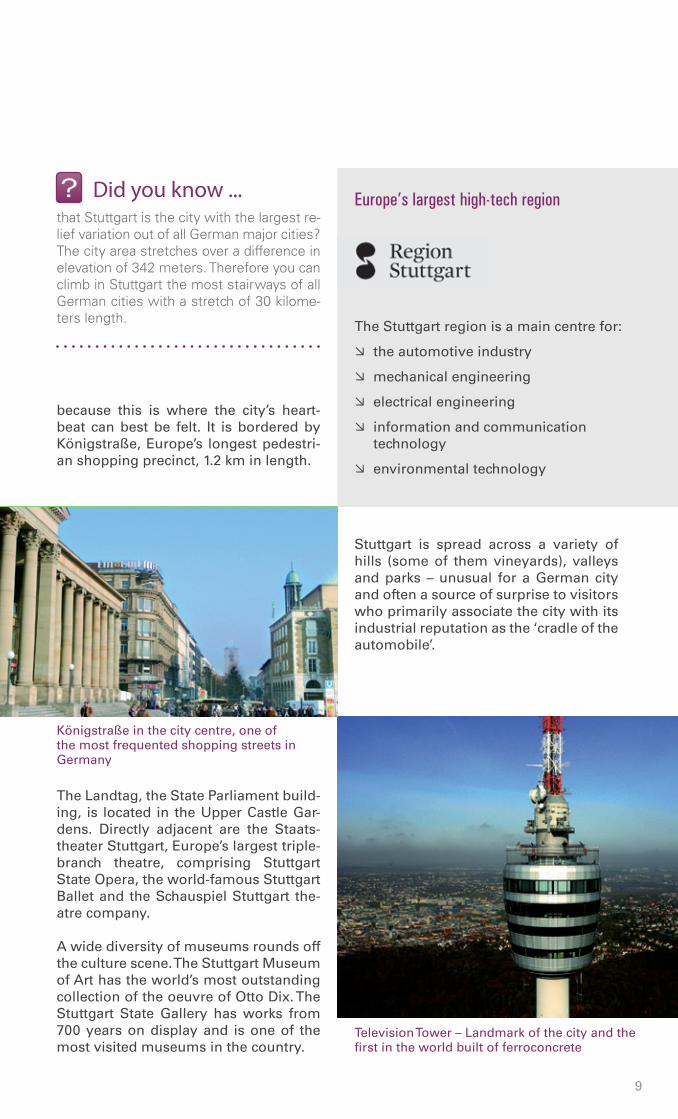
The Stuttgart Region comprises 179 towns and communities, divided into five administrative districts and the mu-nicipality of Stuttgart. About 2.7 million people of around 170 different nationali-ties live here, 581 092 of them in Stutt-gart. The state capital’s main landmark is the Television Tower - the first of its kind worldwide.
Stuttgart owes its name to a stud farm, or “Stuotgarten”, which Duke Liudolf of Swabia is said to have founded in 950 AD. To defend this stud farm the Old Castle was built. The New Castle was the residence of the kings of Württemberg up to the middle of the 19th century. To-day the building contains ministries of the Baden-Württemberg state govern-ment and state reception rooms.
The Castle Square is the most central part of Stuttgart. It’s an absolute must when enjoying a stroll through the city,
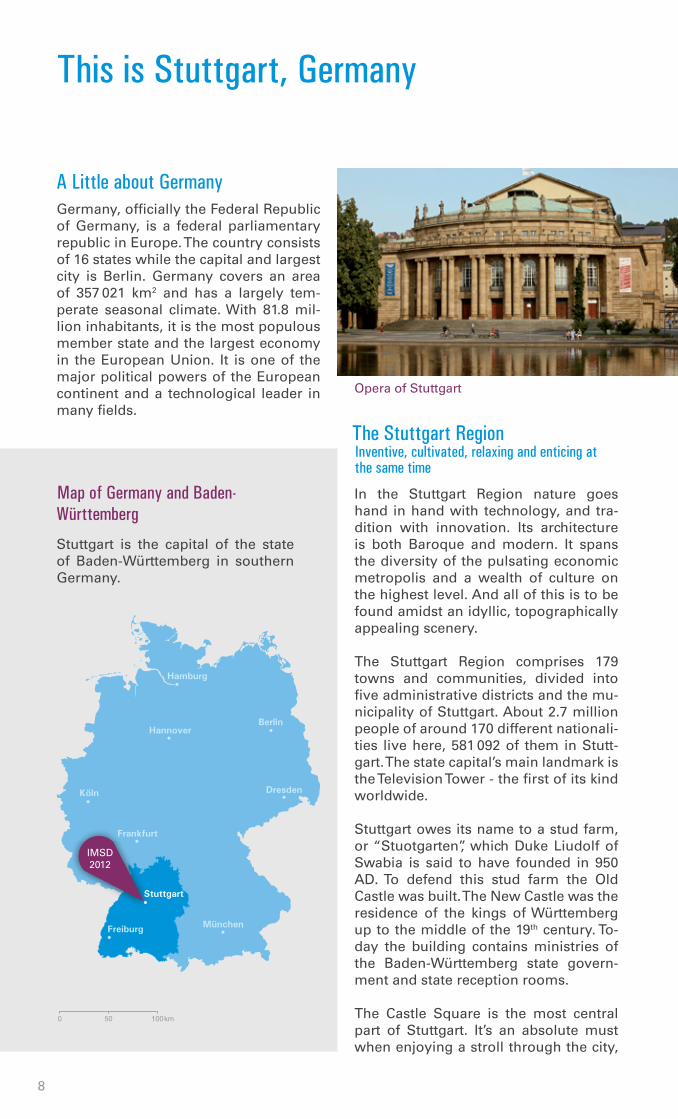
Map of Germany and Baden-Württemberg
Stuttgart is the capital of the state of Baden-Württemberg in southern Germany.
Opera of Stuttgart
Stuttgart
Freiburg
Frankfurt
Köln
Hannover
Hamburg
Berlin
Dresden
München
IMSD2012
9
Europe’s largest high-tech region
The Stuttgart region is a main centre for:
º the automotive industry
º mechanical engineering
º electrical engineering
º information and communication technology
º environmental technology
because this is where the city’s heart-beat can best be felt. It is bordered by Königstraße, Europe’s longest pedestri-an shopping precinct, 1.2 km in length.
The Landtag, the State Parliament build-ing, is located in the Upper Castle Gar-dens. Directly adjacent are the Staats- theater Stuttgart, Europe’s largest triple-branch theatre, comprising Stuttgart State Opera, the world-famous Stuttgart Ballet and the Schauspiel Stuttgart the-atre company.
A wide diversity of museums rounds off the culture scene. The Stuttgart Museum of Art has the world’s most outstanding collection of the oeuvre of Otto Dix. The Stuttgart State Gallery has works from 700 years on display and is one of the most visited museums in the country.
Television Tower – Landmark of the city and the first in the world built of ferroconcrete
Königstraße in the city centre, one of the most frequented shopping streets in Germany
Stuttgart is spread across a variety of hills (some of them vineyards), valleys and parks – unusual for a German city and often a source of surprise to visitors who primarily associate the city with its industrial reputation as the ‘cradle of the automobile’.
Did you know ...that Stuttgart is the city with the largest re-lief variation out of all German major cities? The city area stretches over a difference in elevation of 342 meters. Therefore you can climb in Stuttgart the most stairways of all German cities with a stretch of 30 kilome-ters length.

10
University of Stuttgart
A Research University of International StandingThe University of Stuttgart lies right in the centre of the largest high-tech re-gion of Europe. We are surrounded by a number of renown research facilities and have such global industrial players as Daimler or Bosch as our neighbours.
We were founded in 1829 and over the years this technical institution has de-veloped to the research intensive uni-versity that it is today. Our main em-phasis is on engineering and the natural sciences. However, combining these areas with humanities and the social sciences adds something special to our profile.
Indicators of our excellent status are projects like the Excellence Cluster “Simulation Technology”. We are also involved in a number of Collaborative Research Centres and Research Training Groups.
Our research activities are concentrated around eight interdisciplinary areas:
º Modelling and simulation technology
º New materials
º Complex systems and communication
º Technology concepts and technology assessment
º Energy and environment
º Mobility
º Integrated product and production design
º Design and technology of sustainable living spaces
We are going to strengthen our research through interdisciplinary networks of cooperation in order to continue to ex-pand our cutting-edge position in these fields. We are going to increase our in-ternational presence and concentrate on themes that are of central impor-tance to our future.
Behind this lies the vision of undertak-ing research on the whole life-cycle of a product. This involves not only the en-gineering implementation but also the evaluation of the sustainability of the technical innovations.
Education and training for scientists of different engineering disciplines
Test setup for monitoring the contact force at a middle-ear prosthesis
Did you know ...that the “Tagblatt-Tower” (publisher of a lo-cal newspaper) was the first skyscraper in Stuttgart with its 61 meters and 18 floors, built in 1928?

11
Departments
º Architecture and Urban Planning
º Civil and Environmental Engineering
º Chemistry
º Energy Technology, Process Engineering and Biological Engineering
º Computer Science, Electrical Engineering and Information Technology
º Aerospace Engineering and Geodesy
º Engineering Design, Production Engineering and Automotive Engineering
º Mathematics and Physics
º Humanities
º Management, Economics and Social Sciences
At a glance
º ~ 4 800 employees
º ~ 2 800 scientific staff
º ~ 250 professors
º ~ 22 600 students enrolled at 10 departments
º ~ 4 500 international students from more than 100 countries all over the world
º ~ 75 study programs
º 7 MSc Programs taught in English
º ~ 400 partner universities worldwide
º annual budget of ~ 400 000 000 Euro
We have become one of the most popu-lar education institutions world-wide for the subjects we offer. Around 22 600 students are enrolled in the courses of-fered by the 150 institutes in the 10 dif-ferent departments.
We offer about 75 degree programs. We also have seven international MSc-degree programs taught entirely in English. In addition, we offer numerous activities that are tailor-made for our in-ternational partners.
The lecture halls are well filled Modern buildings on the Campus in Vaihingen
12
Useful Information
Tickets and TransportationYou can ride all streetcars, suburban railways and buses within the metro-politan Stuttgart area with a VVS ticket. VVS means Transit and Tariff Associa-tion Stuttgart (German: Verkehrs- und Tarifverbund Stuttgart). We recommend you to buy a single ride ticket (German: Einzelticket) for two zones for your jour-ney from the airport to the University Campus Vaihingen or from the main station to the University Campus Vaihin-gen or vice versa. Step off at the station “Universität”.
A single ride ticket entitles the rider to one ride in the same direction, but changing lines as well as short ride in-terruptions are permitted. The tickets remain in effect for two hours from pur-chase. The price for two zones is 2.60 Euro.
You can buy your ticket from the ticket machines. You will find them close to the entry of the suburban railway sta-tions. Unfortunately you won’t find the ticket machines on the platform of the suburban railways.
Single Day Tickets with an unlimited number of rides or a discounted multi-trip travel card with four single tickets are also available from the ticket ma-chines.
The 3-Day-Ticket is an attractive offer designed for overnight guests at hotels and guest houses within the VVS territo-ry. Please ask for a 3-Day-Ticket in your hotel.
A map of the railway network is con-tained in the conference bag.
How to Arrive at the University Campus VaihingenFrom Stuttgart main station (German: Hauptbahnhof) or from Stuttgart city centre (German: Stadtmitte) you should
take one of the following suburban rail-ways (German: S-Bahn) which travel every 10 minutes. It takes you about 10 minutes to get from the main station to the University Campus Vaihingen (Ger-man: Universität):
º S1: Direction Böblingen / Herrenberg
º S2: Direction Vaihingen / Filderstadt
º S3: Direction Vaihingen / Flughafen /Messe
Leave the station at the exit University Centre (German: Universitätszentrum) which is very close to Pfaffenwaldring.
After arriving at the platform take the exit to the University Campus and af-ter going up by elevator or stairways you are already in front of the confer-ence building. If you take the wrong exit and find yourself in a living area, don’t worry. The university is just two minutes walking away.
Useful Addresses & Phone NumbersEmergency number 112 In case of an emergency call 112. This number will connect you to the po-lice, ambulance or fire department. The emergency number does not require an area code and the phone call is free.
PoliceThe nearest police station to the Univer-sity Campus Vaihingen is located in the Pfaffenwaldring 1. The telephone num-ber is 0049 (0) 711- 6869230. Another one is located in the Robert-Leicht-Straße 15. The telephone number is 0049 (0) 711-8990-4460.
Taxi A taxi from the University Campus Vai-hingen to the city centre or vice versa costs about 22 Euro but the suburban railway (German: S-Bahn) is faster and cheaper. A telephone number to reserve a taxi is 0049 (0) 711-731441.
13
Practical MattersGerman time is 1 hour ahead of Green-wich Mean Time (UTC+1), in Summer (from March to October) 2 hours ahead of Greenwich Mean Time (UTC+2).
Supermarkets are usually open from 8 a.m. until 8 p.m. on weekdays (Monday to Saturday). Shops are usually open from 9.30 a.m. until 8 p.m. on week-days (Monday to Saturday). On Sunday and public holidays (like Monday May 28, 2012) supermarkets and shops are closed.
Prices in Germany already contain val-ue-added tax (VAT). Additional tips in the amount of 5-10% of the bill are usual in restaurants.
Post offices and mailboxes are yellow and bear the label “Deutsche Post”.
The tap water in Germany is safe to drink.
The voltage in Germany is 220 V (230 V), 50 Hz. Round “European” two-pin plugs and sockets are used.
Only pharmacies (German: Apotheke) sell medicines. They are usually open from 9.30 a.m. until 8 p.m. on weekdays (Monday to Saturday).
Coffee breaks will take place twice a day, in the morning and in the afternoon in the room 0.267.
Lunches are served between 1 p.m. and 2 p.m. in the restaurant of the Commun-do Tagungshotel, Universitätsstraße 34.
Wireless internet is available for the conference participants in the confer-ence venue. Eduroam can be used. Log-ins and passwords will be given at the Registration Desk. Alternatively some computers with internet access are also available in the computer room of the Institute of Engineering and Computa-tional Mechanics.
Germany DeutschlandHello! HalloBye! TschüssGoodbye! Auf WiedersehenSee you later Bis später!Yes JaNo NeinThank you! DankeYou’re welcome! Bitte!Excuse me EntschuldigungMy name is ... Ich heiße ...I’d like ... Ich hätte gerne ...How much is it ... Was kostet ...?Could we pay please? Zahlen bitte.I don’t understand. Ich verstehe Sie nicht.I don’t speak German. Ich spreche kein Deutsch.Do you speak English? Sprechen Sie Englisch?How are you? Wie geht es Ihnen?Where is the toilet? Wo ist die Toilette?
Entrance EingangExit Ausgang Help! Hilfe
one einstwo zweithree dreifour vierfive fünfsix sechsseven siebeneight achtnine neunten zehn
Monday MontagTuesday DienstagWednesday MittwochThursday DonnerstagFriday FreitagSaturday SamstagSunday Sonntag
Common Expressions in German language
14
Social Program
RegistrationUniversity of Stuttgart
The conference registration will start on Monday, 28th of May 2012, from 4 p.m. until 8 p.m. in the room 0.208, Pfaffen-waldring 9, at the Registration Desk.
Please note that this day is a public holi-day in Germany and shops are closed.
Welcome ReceptionUniversity of Stuttgart
The welcome reception will begin on Monday, 28th of May 2012 at 6 p.m. It will take place in the room 0.208, Pfaff-enwaldring 9, at the Registration Desk. This is where the participants get the first chance to meet each other.
Conference Reception Inner courtyard of the Old Castle
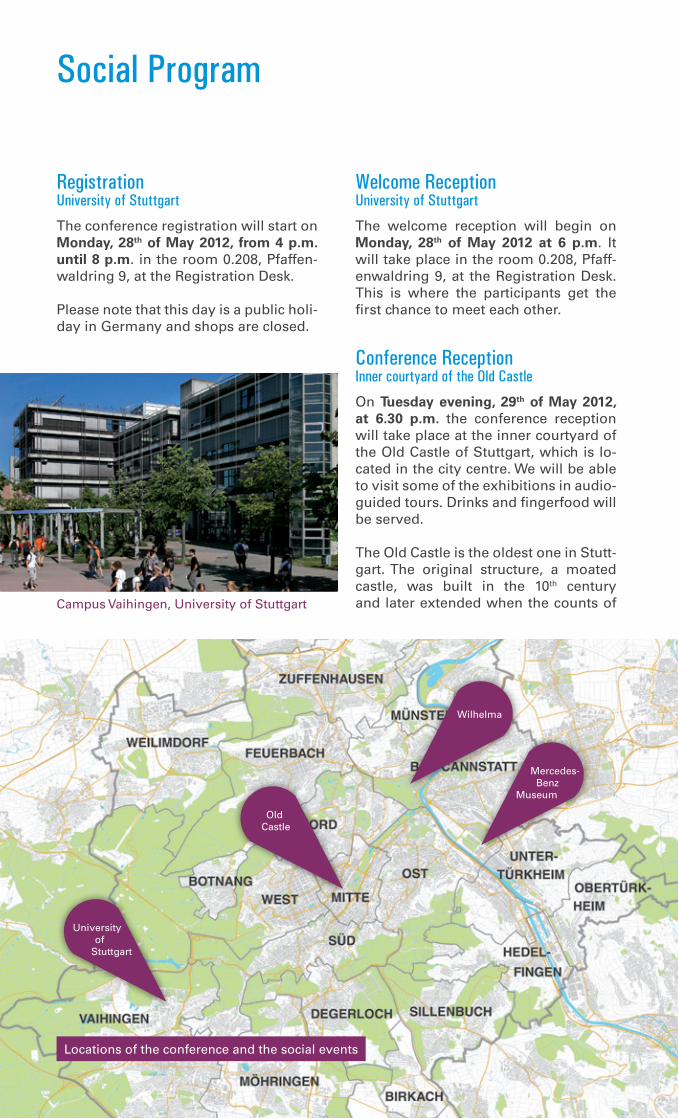
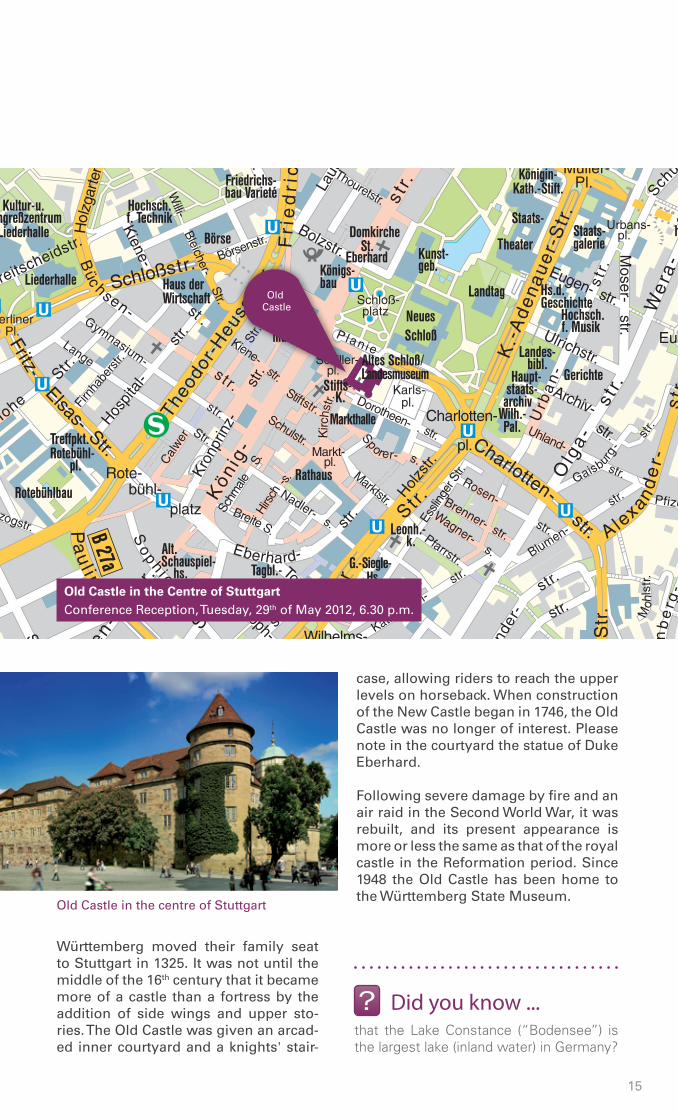
On Tuesday evening, 29th of May 2012, at 6.30 p.m. the conference reception will take place at the inner courtyard of the Old Castle of Stuttgart, which is lo-cated in the city centre. We will be able to visit some of the exhibitions in audio-guided tours. Drinks and fingerfood will be served.
The Old Castle is the oldest one in Stutt-gart. The original structure, a moated castle, was built in the 10th century and later extended when the counts of Campus Vaihingen, University of Stuttgart
University of Stuttgart
Old Castle
Wilhelma
Mercedes- Benz
Museum
Locations of the conference and the social events
15
Württemberg moved their family seat to Stuttgart in 1325. It was not until the middle of the 16th century that it became more of a castle than a fortress by the addition of side wings and upper sto-ries. The Old Castle was given an arcad-ed inner courtyard and a knights' stair-
case, allowing riders to reach the upper levels on horseback. When construction of the New Castle began in 1746, the Old Castle was no longer of interest. Please note in the courtyard the statue of Duke Eberhard.
Following severe damage by fire and an air raid in the Second World War, it was rebuilt, and its present appearance is more or less the same as that of the royal castle in the Reformation period. Since 1948 the Old Castle has been home to the Württemberg State Museum.
Old Castle in the centre of Stuttgart
Old Castle
Old Castle in the Centre of StuttgartConference Reception, Tuesday, 29th of May 2012, 6.30 p.m.
Did you know ...that the Lake Constance (“Bodensee”) is the largest lake (inland water) in Germany?
16
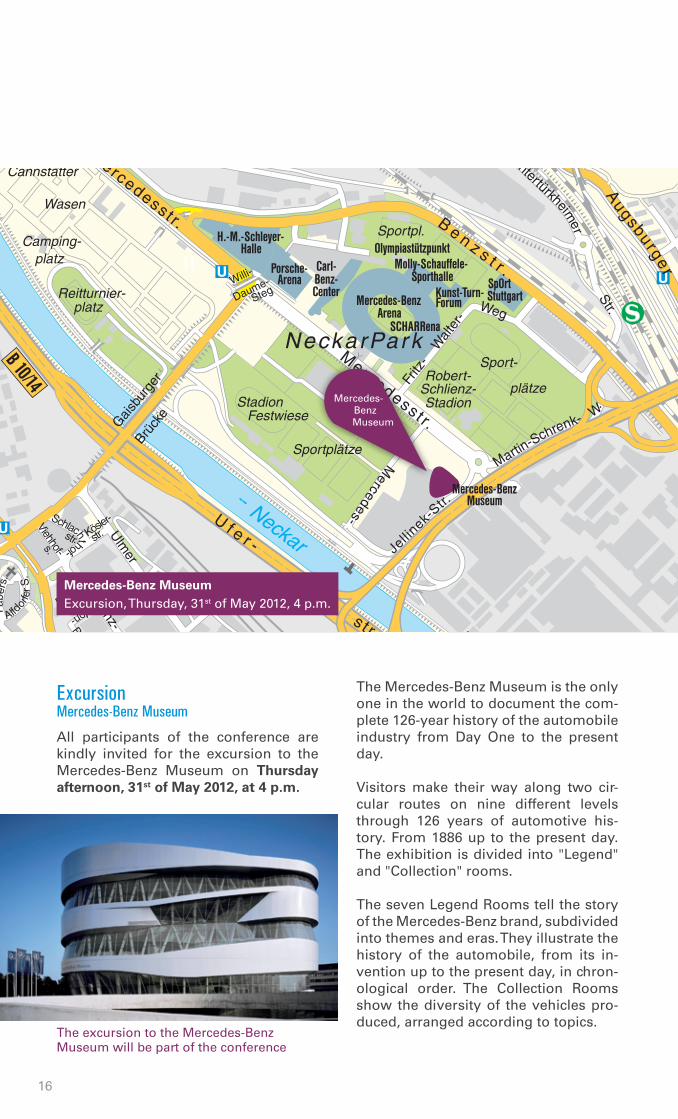
Excursion Mercedes-Benz Museum
All participants of the conference are kindly invited for the excursion to the Mercedes-Benz Museum on Thursday afternoon, 31st of May 2012, at 4 p.m.
The Mercedes-Benz Museum is the only one in the world to document the com-plete 126-year history of the automobile industry from Day One to the present day.
Visitors make their way along two cir-cular routes on nine different levels through 126 years of automotive his-tory. From 1886 up to the present day. The exhibition is divided into "Legend" and "Collection" rooms.
The seven Legend Rooms tell the story of the Mercedes-Benz brand, subdivided into themes and eras. They illustrate the history of the automobile, from its in-vention up to the present day, in chron-ological order. The Collection Rooms show the diversity of the vehicles pro-duced, arranged according to topics.
The excursion to the Mercedes-Benz Museum will be part of the conference
Mercedes-Benz MuseumExcursion, Thursday, 31st of May 2012, 4 p.m.
Mercedes-Benz Museum
17
Conference Dinner"Wilhelma" Zoological and Botanical Garden
The Conference Dinner will be held on Thursday evening, 31st of May 2012, at 6.45 p.m. in the Aquarium at the Wilhel-ma. The combination of historical ambi-ence, tropical plants and animals make a visit to the Wilhelma a very special expe-rience, no matter what the time of year. Germany's only zoological and botani-cal garden reflects 160 years of history.
Today the "Alhambra on the Neckar", as the Wilhelma is often referred to, has about 9000 animals from 1000 different species, making it one of the most di-verse zoos in the world, and one which represents a cross-section from every climatic zone on earth. There's also a valuable collection of plants, compris-ing some 6000 species.
One of the Wilhelma's gems is the Aquarium, always a crowd puller. Un-derwater habitats, from the North Sea
to a coral reef and from the Neckar to the Murray River are represented by the corresponding fish, invertebrates and water plants found there.
The adjoining Terrarium is home to all manner of bizarre and poisonous crea-tures and thrills visitors with its croco-dile hall.
Wilhelma Aquarium
The Conference Dinner will be held in the Aquarium at the Wilhelma Zoological and Botanical Garden
Zoological and Botanical Garden “Wilhelma”Conference Dinner, Thursday, 31st of May 2012, 6.45 p.m.
18
Transfer Individual arrival to the Conference Reception at the inner courtyard of the Old Castle
Please use the suburban railway S1 (Di-rection: Kirchheim/Teck), S2 (Direction: Schorndorf) or S3 (Direction: Backnang) from the University Campus Vaihingen (German: Universität) to the station “Stadtmitte”. You need a valid ticket for two zones.
Leave the station at the exit “Büchsen-straße” and then use the map on page 15 to get to the Old Castle by foot.
Shuttle bus to the Mercedes-Benz Museum and the Conference Dinner
A shuttle bus will depart on Thursday, 31st of May 2012, at 3.45 p.m. at the University of Stuttgart in the Univer-sitätsstraße (Schleife) bringing the par-ticipants directly to the Mercedes-Benz Museum and later to the Wilhelma.
At the end of the conference dinner, there will be a bus shuttle back to the city centre of Stuttgart and to the Uni-versity Campus Vaihingen. More details will be given during the conference.
The shuttle bus departs close to the building in Pfaffenwaldring 7 and 9 in front of the Commundo Tagungshotel
Did you know ...that Stuttgart´s cable car is humorously called “Legacy Hunter Express” or “Wid-ows Express”? The wooden cable car of 1929 got these nicknames because of its station at the cemetery “Waldfriedhof”.
The entrance of the Old Castle is on the side of the Castle Square (German: Schlossplatz)
19
Scientific Program
Program Overview Detailed Technical Program

20
Program Overview
MOnDay, May 28, 2012 16:00 – 20:00 Pre-Registration Room 0.208
18:00 – 20:00 Welcome Reception Room 0.208
TueSDay, May 29, 2012 Registration Desk opens at 8 a.m.
09:00 – 09:40 Welcome session Room V 7.02
09:40 – 10:20 Keynote Wan-suk yooMBD Applications in Design
Room V 7.02
10:30 – 11:10 Flex1 Room V 9.01
con1 Room V 7.03
Alg1 Room 0.144
11:10 – 11:40 Coffee BReak
11:40 – 13:00 Flex2 Room V 9.01
con2 Room V 7.03
oPt1 Room V 7.04
Alg2 Room 0.144
eFF1 Room 0.153
13:00 – 14:00 LunCh
14:00 – 14:40 Keynote olivier Brüls Trends and Challenges in Flexible
Multibody Dynamics: From Simulation to Control and Design
Room V 7.02
14:50 – 15:50 Flex3 Room V 9.01
con3 Room V 7.03
oPt2 Room V 7.04
Alg3 Room 0.144
eFF2 Room 0.153
15:50 – 16:20 Coffee BReak
16:20 – 17:40 Flex4 Room V 9.01
con4 Room V 7.03
oPt3 Room V 7.04
Alg4 Room 0.144
eFF3 Room 0.153
18:30 – 21:00 conference Reception – old castle
WeDneSDay, May 30, 2012 Registration Desk opens at 8 a.m.
09:00 – 09:40 Keynote Harry DankowiczComputational DFD Analysis: Using
Continuation Methods in Dynamics for Design
Room V 7.02
09:50 – 11:10 RoB1 Room V 9.01
con5 Room V 7.03
Flex5 Room V 7.04
Alg5 Room 0.144
eFF4 Room 0.153
11:10 – 11:40 Coffee BReak
11:40 – 13:00 RoB2 Room V 9.01
con6 Room V 7.03
Flex6 Room V 7.04
Alg6 Room 0.144
otH1 Room 0.153
13:00 – 14:00 LunCh
14:00 – 14:40 Keynote yoshihiro sudaDynamic Simulation and Analysis for Sustainable Transport Systems
Room V 7.02
14:50 – 15:50 RoB3 Room V 9.01
con7 Room V 7.03
Flex7 Room V 7.04
Bio1 Room 0.144
otH2 Room 0.153
15:50 – 16:20 Coffee BReak
16:20 – 17:40 RoB4 Room V 9.01
con8 Room V 7.03
Flex8 Room V 7.04
tHeo1 Room 0.144
21
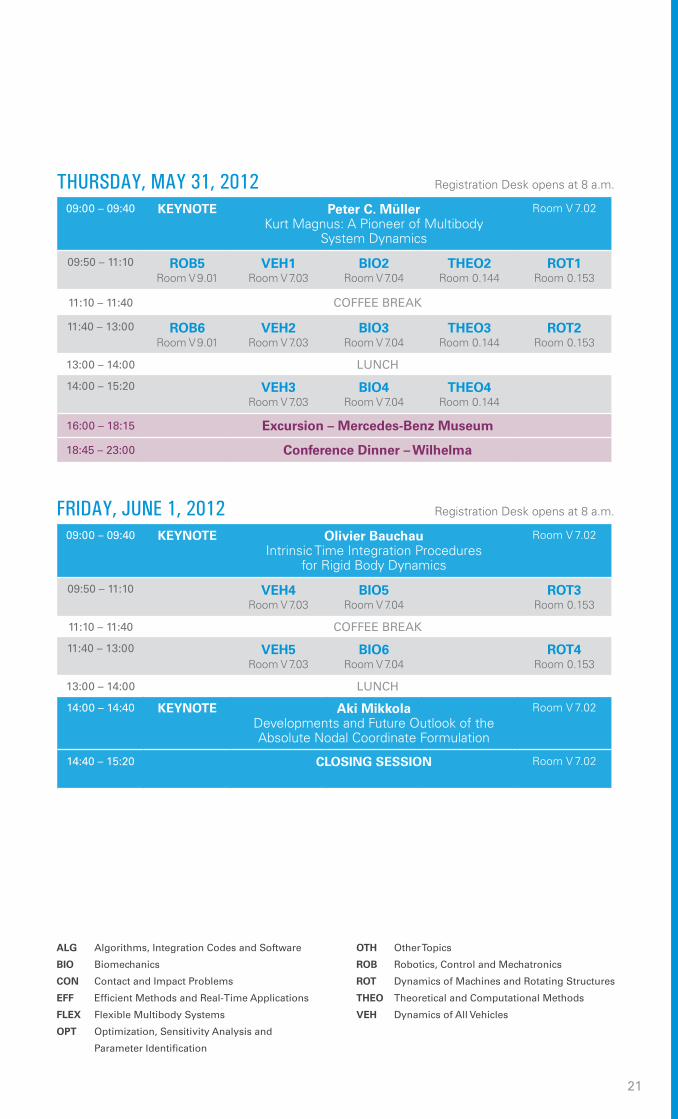
ThurSDay, May 31, 2012 Registration Desk opens at 8 a.m.
09:00 – 09:40 Keynote Peter c. müllerKurt Magnus: A Pioneer of Multibody
System Dynamics
Room V 7.02
09:50 – 11:10 RoB5 Room V 9.01
VeH1 Room V 7.03
Bio2 Room V 7.04
tHeo2 Room 0.144
Rot1 Room 0.153
11:10 – 11:40 Coffee BReak
11:40 – 13:00 RoB6 Room V 9.01
VeH2 Room V 7.03
Bio3 Room V 7.04
tHeo3 Room 0.144
Rot2 Room 0.153
13:00 – 14:00 LunCh
14:00 – 15:20 VeH3 Room V 7.03
Bio4 Room V 7.04
tHeo4 Room 0.144
16:00 – 18:15 excursion – mercedes-Benz museum
18:45 – 23:00 conference Dinner – Wilhelma
FriDay, June 1, 2012 Registration Desk opens at 8 a.m.
09:00 – 09:40 Keynote olivier BauchauIntrinsic Time Integration Procedures
for Rigid Body Dynamics
Room V 7.02
09:50 – 11:10 VeH4 Room V 7.03
Bio5 Room V 7.04
Rot3 Room 0.153
11:10 – 11:40 Coffee BReak
11:40 – 13:00 VeH5 Room V 7.03
Bio6 Room V 7.04
Rot4 Room 0.153
13:00 – 14:00 LunCh
14:00 – 14:40 Keynote Aki mikkola Developments and Future Outlook of the Absolute Nodal Coordinate Formulation
Room V 7.02
14:40 – 15:20 closing session Room V 7.02
Alg algorithms, Integration Codes and Software
Bio Biomechanics
con Contact and Impact Problems
eFF efficient Methods and Real-Time applications
Flex flexible Multibody Systems
oPt optimization, Sensitivity analysis and
Parameter Identification
otH other Topics
RoB Robotics, Control and Mechatronics
Rot Dynamics of Machines and Rotating Structures
tHeo Theoretical and Computational Methods
VeH Dynamics of all Vehicles

22
Detailed Technical Program
Welcome session Peter eberhard, Chairman IMSD 2012Wolfram Ressel, Rector university of Stuttgart nobuyuki shimizu, Representative JSMeAki mikkola, Chairman IMSD
09:00 – 09:40Room V 7.02
Keynote | Wan-suk yoo MBD applications in DesignSession Chair: Peter eberhard
09:40 – 10:20Room V 7.02
Flex 1 of 8 | Flexible multibody systems Session Chair: ahmed Shabana
10:30 – 11:10Room V 9.01
On the Effect of the Discretisation Scheme on the Eigenfrequencies and Modes of Shear Flexible RodsHolger Lang, Joachim Linn
Deformation Modes and Dual Stress Resultants of Spatial Beam Elements in Large Deflection Multibody System AnalysesBen Jonker, Jacob P. Meijaard
con 1 of 8 | contact and impact Problems Session Chair: Christoph Glocker
10:30 – 11:10Room V 7.03
Multibody Model of a Grand Piano Action Mechanism Aimed at Understanding and Demystifying the Escapement PrincipleBaudouin Bokiau, Antoine Poncelet, Paul Fisette, Nicolas Docquier
A Mechanistic Model of Compression Hysteresis in Compliant Interfaces in Multibody Dynamic Simulation of a Piano Action MechanismRamin Masoudi, John McPhee
Alg 1 of 6 | Algorithms, integration codes and software Session Chair: Dan negrut
10:30 – 11:10Room 0.144
Comparison of Different Error Estimation Approaches for Controlling the Macro-Step Size in Co-Simulation MethodsMartin Busch, Robert Schmoll, Bernhard Schweizer
Numerical Aspects of FMI for Model Exchange and Co-Simulation v2.0Martin Arnold, Christoph Clauß, Tom Schierz
Coffee BReak 11:10 – 11:40
Flex 2 of 8 | Flexible multibody systems Session Chair: Ben Jonker
11:40 – 13:00Room V 9.01
Dynamic Response of Geometrically Non-Linear Beam under Moving MassEva Zupan, Miran Saje
Geometrically Exact Cosserat Rods with Kelvin-Voigt Type Viscous DampingJoachim Linn, Holger Lang, Andrey Tuganov
Construction of Discrete Shells by Geometric Finite DifferencesClarisse Weischedel, Andrey Tuganov, Tomas Hermansson, Joachim Linn, Max Wardetzky
Isogeometric Shell Discretizations for Flexible Multibody DynamicsAnmol Goyal, Michael Dörfel, Bernd Simeon

23
TueSDay, May 29, 2012MOrning
con 2 of 8 | contact and impact Problems Session Chair: Ronald aarts
11:40 – 13:00Room V 7.03
A Constructive Solution for Kane’s Dynamics PuzzleChristoph Glocker
The Global Simulation Method of Flexible Multibody System Dynamics with ImpactZhu-yong Liu, Jia-zhen Hong, Jin-yang Liu, Fu-xiang Dong
Load Assessment and Analysis of Impacts in Multibody SystemsFrancisco González, József Kövecses
Experiment Investigation on Flexible Multibody System with Contact-ImpactJinyang Liu, Min Lei
oPt 1 of 3 | optimization, sensitivity Analysis and Parameter identification Session Chair: Michael hanss
11:40 – 13:00Room V 7.04
Real-Time Parameter Estimation Study for Inertia Properties of Ground VehiclesJeremy Kolansky, Corina Sandu
Physically Motivated Modeling and Identification of Advanced Vehicle Shock AbsorbersDieter Bestle, Torsten Funke
Parameter Identification for Multibody Systems Governed by DAEsThomas Uchida, Chandrika P. Vyasarayani, Michael Smart, John McPhee
Friction Modeling and Parameter Value Estimation in MechanismsThomas Thümmel, Johannes Rutzmoser, Heinz Ulbrich
Alg 2 of 6 | Algorithms, integration codes and software Session Chair: hao Wang
11:40 – 13:00Room 0.144
Molecular Dynamics Simulation of Simple Polymer Chain Using Parallel Multibody Algorithm Based on Augmented Lagrangian MethodPawel Malczyk, Janusz Frączek
Timestepping Schemes Based on Time Discontinuous Galerkin MethodsThorsten Schindler, Vincent Acary
The XDE Mechanical Kernel: Efficient and Robust Simulation of Multibody Dynamics with Intermittent Nonsmooth ContactsXavier Merlhiot, Jérémie Le Garrec, Guillaume Saupin, Claude Andriot
On Non-Unique Solutions of Contact Problems with the Coulomb FrictionVladimír Janovský, Radek Kucera
eFF 1 of 4 | efficient methods and Real-time Applications Session Chair: Taichi Shiiba
11:40 – 13:00Room 0.153
On Developing a Multi-Threaded O(log(n)) Parallel Dynamics Engine Starting from a Sequential O(n) ImplementationKishor D. Bhalerao
An Explicit-Implicit Integration Method for Unmanned Robot Vehicle Using the Subsystem Synthesis Method Based on Joint CoordinatesJun-Youn Jo, Sung-Soo Kim, Myoung-Ho Kim
Exponential Integration Schemes in Multibody DynamicsJavier Ros, Xabier Iriarte, Roberto Yoldi, Aitor Plaza, Jorge Ángeles
On the Applicability of Static Modes Switching in Gear Contact ApplicationsTommaso Tamarozzi, Pascal Ziegler, Peter Eberhard, Wim Desmet
LunCh 13:00 - 14:00

24
Detailed Technical Program
Keynote | olivier BrülsTrends and Challenges in flexible Multibody Dynamics: from Simulation to Control and DesignSession Chair: Javier García de Jalón
14:00 – 14:40Room V 7.02
Flex 3 of 8 | Flexible multibody systemsSession Chair: Wan-Suk Yoo
14:50 – 15:50 Room V 9.01
Integrated Simulation of GPU Accelerated Particle Dynamics and Multi Flexible Body DynamicsJoon Shik Yoon, Ji Soo Park, Cheol O Ahn, Jin Hwan Choi
Efficient Modeling of Frictional Contacts with Absolute Nodal Coordinate Formulation and the Parallel GPU Implementation for Simulation of Large Systems with Flexible BodiesNaresh Khude, Dan Melanz, Justin Madsen, Dan Negrut
Integration of Nonlinear Models of Flexible Body Deformation in Multibody System DynamicsMartin Schulze, Stefan Dietz, Andrey Tuganov, Holger Lang, Joachim Linn
con 3 of 8 | contact and impact ProblemsSession Chair: Sigrid Leyendecker
14:50 – 15:50Room V 7.03
Towards a Real-Time Capable Realistic Soil Contact Model Using a Particle SystemYong-Ho Yoo, Lorenz Quack
Dynamics of Rigid Body Impacting Dense Granular MediumYong Pang, Caishan Liu
Euler’s Disk and Disk-Ball SystemHongjian Zhang, Caishan Liu
oPt 2 of 3 | optimization, sensitivity Analysis and Parameter identificationSession Chair: Dieter Bestle
14:50 – 15:50Room V 7.04
Multi Body Simulation and Optimization of Large-Bore Combustion Engines Using Model Order ReductionAlexander Riess, Ronald H. W. Hoppe, Eckhardt Eisenbeil, Andreas Linke, Dietmar Pinkernell
Reduction of a Vehicle Multibody Dynamic Model Using Homotopy OptimizationAndrew Hall, Thomas Uchida, Francis Loh, Chad Schmitke, John McPhee
Performance Evaluation and Design Optimization of a Pantograph for the High-Speed TrainJin Hee Lee, Tae Won Park, Kyung Seok Sim
Alg 3 of 6 | Algorithms, integration codes and softwareSession Chair: Bernhard Schweizer
14:50 – 15:50Room 0.144
On the Stability of Lie Group Time Integration in Multibody DynamicsPeter Češarek, Dejan Zupan
Enabling Computational Dynamics in Distributed Computing Environments Using a Heterogeneous Computing TemplateHammad Mazhar, Toby Heyn, Andrew Seidl, Spencer O’Rourke, Alessandro Tasora, Dan Negrut
A C++ Library for Algebraic Computations of Rigid Body MotionsAndreas Müller, Alessandro Tasora
eFF 2 of 4 | efficient methods and Real-time ApplicationsSession Chair: Corina Sandu
14:50 – 15:50Room 0.153
Comparison of Linearized vs. Non-Linearized Multibody Vehicle Model for Real-Time SimulationKotaro Obana, Taichi Shiiba, Naoya Machida
Hardware-in-the-Loop Simulation of High-Fidelity Multibody SystemsWilliam C. Prescott
Real-Time Simulation of Tracked Vehicles on Rough TerrainClaude Lacoursière
Coffee BReak 15:50 – 16:20

25
TueSDay, May 29, 2012aFTernOOn
Flex 4 of 8 | Flexible multibody systems Session Chair: José L. escalona
16:20 – 17:40Room V 9.01
A Study on the Virtual Working Simulation of Wheel Loader for Fatigue Life AssessmentHee-Jong Lee, Tae-Ro Cha, Pan-Young Kim, Sung-Woo Nam
An Efficient Description for Rotating Flexible Structures with Spatially Fixed LoadsIngo Kaiser, Andreas Heckmann
Effect of Fibre Preload on the Dynamics of an Inverted Pendulum Driven by FibresPavel Polach, Michal Hajžman
con 4 of 8 | contact and impact Problems Session Chair: Yoshiaki Terumichi
16:20 – 17:40Room V 7.03
A Compliant Contact Model Based on Differential Variational InequalitiesAlessandro Tasora, Dan Negrut, Silvia Negrini
The Exclusion Principle of DynamicsFriedrich Pfeiffer
On the Numerical Solution of Many-Body Dynamics Problems Formulated as Complementarity ProblemsToby Heyn, Mihai Anitescu, Alessandro Tasora, Dan Negrut
Co-rotated Finite Elements and Reduced Order Modeling of Multibody Dynamic Contact ProblemsTomasz Koziara, Lukasz Kaczmarczyk, Steve Brasier, Nenad Bićanić
oPt 3 of 3 | optimization, sensitivity Analysis and Parameter identification Session Chair: Peter C. Müller
16:20 – 17:40Room V 7.04
A Fuzzy Arithmetical Approach to the Inclusion of Uncertainties in Multibody SystemsMichael Hanss, Nico-Philipp Walz
Computation of Independent Sensitivities Using Maggi’s FormulationMaría D. Gutiérrez-López, Alfonso Callejo, Javier García de Jalón
Vehicle-Terrain Interaction Model for Analysis and Performance EvaluationBahareh Ghotbi, Francisco J. González, Jozsef Kövecses, Jorge Angeles
Using Multibody-System Modelling to Make Accurate Predictions of Vehicle Impacts on Road Restraint SystemsDetlef H.-J. F. Neuenhaus, Urs Joachim Geßler
Alg 4 of 6 | Algorithms, integration codes and software Session Chair: olivier Brüls
16:20 – 17:40Room 0.144
The Modeling of Flexible Bodies in the Object-Oriented Multi-Domain Framework ModelicaAndreas Heckmann, Stefan Hartweg, Martin Otter, Jakub Tobolár, Jonathan Brembeck
Structural Dynamics of Internal Combustion Engines Considering Oil Film Lubricated ContactsGünter Offner
An Object Oriented Framework: From Flexible Multibody Dynamics to Fluid-Structure InteractionChristian Hesch, Peter Betsch
A Membrane Element for Micro-Aerial Vehicle Fluid-Structure InteractionPierangelo Masarati, Marco Morandini, Tommaso Solcia
eFF 3 of 4 | efficient methods and Real-time Applications Session Chair: Bill Prescott
16:20 – 17:40Room 0.153
Real-Time Simulation of an n x n Vehicle for Autonomous DrivingSang-Do Na, Bo-min Kim, Kwang-Suk Kim, Wan-Suk Yoo
Connected Sub-System Global Modal Parameterization for Efficient Simulation of Complex Flexible Multibody SystemsFrank Naets, Wim Desmet
Model Reduction for Efficient Time-Integration of Non-Linear Flexible Multibody ModelsSteven Boer, Derk ten Hoopen, Ronald Aarts, Wouter Hakvoort, Ben Jonker
On the Gröbner Basis Triangularization of Constraint Equations in Natural CoordinatesThomas Uchida, Alfonso Callejo, Javier García de Jalón, John McPhee
conference Reception – old castle 18:30 – 21:00

26
Detailed Technical Program
Keynote | Harry DankowiczComputational DfD analysis: using Continuation Methods in Dynamics for DesignSession Chair: Janusz frączek
09:00 – 09:40
Room V 7.02
RoB 1 of 6 | Robotics, control and mechatronics Session Chair: Subir kumar Saha
09:50 – 11:10Room V 9.01
Analysis of Servo-Constraint Problems for Underactuated Multibody SystemsRobert Seifried, Wojciech Blajer
Multibody Models of Compliant and Underactuated Robotic Hands Grasping and Manipulating ObjectsMonica Malvezzi, Domenico Prattichizzo
Dynamic Analysis of Under-Actuated Mechanical Systems for Design Optimization and Control PerformanceLászló Kovács, László Bencsik, József Kövecses
Wave-Based Control of Under-Actuated Flexible Structures with Strong External Disturbing ForcesWilliam J. O’Connor, Hossein Habibi
con 5 of 8 | contact and impact Problems Session Chair: Xiaoting Rui
09:50 – 11:10Room V 7.03
Structure Preserving Simulation of Monopedal JumpingMichael W. Koch, Sigrid Leyendecker
Planned Contacts and Collision Avoidance in Optimal Control ProblemsSigrid Leyendecker, Gwen Johnson, Michael Ortiz
Analytic Solution to 3-Dimensional, Single Point Collision Problems Using Stronge’s HypothesisAdrian Rodriguez, Alan Bowling
A Linear-by-Part Approach for Dissipative Multiple-Point Collisions in Smooth Multibody Systems with Perfect ConstraintsAna Barjau, Joaquim A. Batlle, Josep M. Font-Llagunes
Flex 5 of 8 | Flexible multibody systems Session Chair: Johannes Gerstmayr
09:50 – 11:10Room V 7.04
Transform from Bezier or B-Spline Curve to ANCF Cable Element for AnalysisZuqing Yu, Peng Lan, Jia Wang, Nianli Lu
Derivation of the Elastic Forces in the Absolute Nodal Coordinate Formulation Based on the Canonical Theory with ConstraintsKensuke Hara, Masahiro Watanabe
Partially-Parameterized ANCF 3D Beam Elements 22(c+1)3 as a Compromise Between Thin Elements 12c3 and Fully-Parameterized Thick Elements 32(c+2)3Oleg Dmitrochenko, Marko Matikainen, Aki Mikkola
Comparison Between ANCF and B-Spline SurfacesAki Mikkola, Ahmed Shabana
Alg 5 of 6 | Algorithms, integration codes and softwareSession Chair: haidong Yu
09:50 – 11:10Room 0.144
Of the Designing of a Software Dedicated to the Numerical Simulation of Contact Dynamic ProblemsRémy Mozul, Frédéric Dubois
Numerical Integration of Regularized Equations of Motion Using the Software Package GEOMSAndreas Steinbrecher
A Workbench for Multibody Systems ODE and DAE SolversChristian Andersson, Johan Andreasson, Claus Führer, Johan Åkesson
Automatic Extraction of DH Parameters of Serial Manipulators Using Line GeometryRajeevlochana Chittawadigi, Subir K. Saha
eFF 4 of 4 | efficient methods and Real-time ApplicationsSession Chair: kurt anderson
09:50 – 11:10Room 0.153
A Novel Method for Dynamics Simulation of Multibody Systems in Singular ConfigurationsEvtim V. Zahariev
State Estimation Using Multibody Models and Nonlinear Kalman FiltersRoland Pastorino, Dario Richiedei, Javier Cuadrado, Alberto Trevisani
ODE Modeling of Multibody Systems for Real-Time SimulationRalph Jödicke, Uwe Jungnickel, Andreas Müller

27
WeDneSDay, May 30, 2012MOrning
Coffee BReak 11:10 – 11:40
RoB 2 of 6 | Robotics, control and mechatronics Session Chair: nikolay Bolotnik
11:40 – 13:00Room V 9.01
Modeling of an Industrial Multi-Robot Portal System as a Flexible Multibody System for Feed-Forward ControlStefan Hartweg
Tracking Error Compensation of a 6-SBU Stewart PlatformBiswajit Halder, Rana Saha, Dipankar Sanyal
Dynamics and Actuation of the Acroboter PlatformAmbrus Zelei, László Bencsik, Gábor Stépán, László Kovács
Coupled Dynamics of a Container Crane with Active Damping of Load SwingEdwin Kreuzer, Christian Radisch, Christian Rapp
con 6 of 8 | contact and impact Problems Session Chair: friedrich Pfeiffer
11:40 – 13:00Room V 7.03
Numerical Experiments with the Painlevé Paradox: Rigid Body vs. Compliant ContactTobias Preclik, Ulrich Rüde
A Position-Based Time-Stepping Approximation of Multibody Dynamics with Perfect Unilateral ConstraintsLaetitia Paoli
Painleve’s Paradoxes: Simulation, Experiment and TheoryZhao Zhen, Caishan Liu
A Newmark-Type Integrator for Flexible Systems Considering Non-Smooth Unilateral ConstraintsQiong-zhong Chen, Vincent Acary, Geoffrey Virlez, Olivier Brüls
Flex 6 of 8 | Flexible multibody systems Session Chair: oskar Wallrapp
11:40 – 13:00Room V 7.04
Modelling of Boundary Conditions and Joints with Finite Elements Based on the Absolute Nodal Coordinate FormulationJohannes Gerstmayr, Peter Gruber, Karin Nachbagauer
Nonlinear Dynamic Analysis of Three-Dimensional Shear Deformable ANCF Beam Finite ElementsKarin Nachbagauer, Peter Gruber, Johannes Gerstmayr
A Controller Design for Flexible Multibody Systems by the Use of Absolute Nodal Coordinate Formulation and Dimension Reduction of the ControllerYoshiki Sugawara, Nobuyuki Kobayashi
Modeling Hoisting Machines with the Arbitrary Lagrangian-Eulerian Absolute Nodal Coordinate FormulationJosé L. Escalona
Alg 6 of 6 | Algorithms, integration codes and softwareSession Chair: John McPhee
11:40 – 13:00Room 0.144
On the Constraints Violation for Forward Multibody Dynamics: Application of the Baumgarte Stabilization MethodJanete L. Alves, Margarida Machado, Nuno Peixinho, Paulo Flores
Efficient Constraint Modeling for Closed-Chain DynamicsAbhinandan Jain, Cory Crean, Calvin Kuo, Marco Quadrelli
otH 1 of 2 | other topicsSession Chair: Sung-Soo kim
11:40 – 13:00Room 0.153
Study on the Effects of GPU Parallel Programming for Multibody System DynamicsJun Chulwoong, Sohn Jeonghyun
Advanced Aero-Elastic Multi-Body Simulation of Wind TurbinesStefan Hauptmann, Friedemann Beyer, Denis Matha, Po-Wen Cheng
Dynamics in Lithographic Projection Objectives - Problems and Current ResearchNicolai Wengert, Jens Kugler, Bernhard Geuppert, Peter Eberhard
Iterative Control for a Vibration Rig Using Estimation of Model UncertaintySeung Guk Baek, Sung Moo Ryew, Ki Tak Ahn, Hyoung Kwon Kim, Ja Choon Koo
LunCh 13:00 - 14:00

28
Keynote | yoshihiro sudaDynamic Simulation and analysis for Sustainable Transport SystemsSession Chair: edwin kreuzer
14:00 – 14:40Room V 7.02
RoB 3 of 6 | Robotics, control and mechatronics Session Chair: Robert Seifried
14:50 – 15:50Room V 9.01
Pole Assignment in Flexible Link Multibody Mechanisms: a Receptance-Based ApproachHuajiang Ouyang, Dario Richiedei, Alberto Trevisani
Simplified Mechanism Representation Through a Multibody Model Reduction Approach for the Enhancement of an Iterative Learning ControllerMarco Gubitosa, Alessandro Toso, Joris De Cuyper, Wim Desmet
Properties of a Time-Optimal Feedback Control for a Second-Order Nonlinear SystemSergey A. Reshmin
con 7 of 8 | contact and impact Problems Session Chair: Laetitia Paoli
14:50 – 15:50Room V 7.03
Simulation of Elastic Gears with Non-Standard Flank ProfilesTrong Phu Do, Pascal Ziegler, Peter Eberhard
A Comparison of Rolling Contact on Roller-Coaster Rails Between Penalty-Methods and Exact Event-Controlled Impact DetectionChristian Malessa, Andres Kecskemethy
Simulation of the Dynamic Interaction of Continuum - Divided Media: Methodology and Application for Dams and BuildingHong-Phong Cao, François Voldoire
Flex 7 of 8 | Flexible multibody systems Session Chair: harry Dankowicz
14:50 – 15:50Room V 7.04
Selection of Dependent and Independent Coordinates in a Flexible Multibody Model Using SVDRonald Aarts, Dannis M. Brouwer, Jacob P. Meijaard, Ben Jonker
Investigations on the Application of Energy-Momentum Schemes to Modally-Reduced Multibody SystemsAlexander Humer, Daniel Reischl, Johannes Gerstmayr
A Fluid-Structure Interaction Approach by Direct Coupling of Smoothed Particle Hydrodynamics with Flexible Multibody System DynamicsMarkus Schörgenhumer, Peter Gruber, Johannes Gerstmayr
Bio 1 of 6 | BiomechanicsSession Chair: andres kecskemethy
14:50 – 15:50Room 0.144
Kinematic Characterization of Soft Tissue Artifacts in Human Movement AnalysisHelios de Rosario, Álvaro Page, Vicente Mata, Antonio Besa, Efraim Conejero
Efficient Formulation for Inverse Dynamics Simulation of Human Sagittal Plane MovementsWojciech Blajer, Krzysztof Dziewiecki, Zenon Mazur
Upper Limb Mechanical Impedance Variability Estimation by Inverse Dynamics and Torque-Less Activation ModesAndrea Zanoni, Pierangelo Masarati, Giuseppe Quaranta
otH 2 of 2 | other topicsSession Chair: nobuyuki Shimizu
14:50 – 15:50Room 0.153
A Robust and Efficient General Purpose Contact Algorithm for Rigid and Flexible BodiesJuhwan Choi, Jin H. Choi
Dynamics Simulation of Long Polymeric Fibres Immersed in a Turbulent Air FlowFrancesco Battocchio, Michael Sutcliffe, F. Teschner
Reactive Power Compensation in Mechanical SystemsCarlos Rengifo, Bassel Kaddar, Yannick Aoustin, Christine Chevallereau
Coffee BReak 15:50 – 16:20
Detailed Technical Program
29
WeDneSDay, May 30, 2012aFTernOOn
RoB 4 of 6 | Robotics, control and mechatronics Session Chair: Yoshihiro Suda
16:20 – 17:40Room V 9.01
Gait Generation and Adaptive Control in Artificial Worm DynamicsJoachim Steigenberger, Carsten Behn
Control of Motion of Limbless One-Dimensional Locomotion Systems in a Resistive MediumNikolay N. Bolotnik, Felix L. Chernousko, Igor Zeidis, Klaus Zimmermann
Importance of Dynamic Parameters in Motion Imitation Using Simple Footage LinkKarthick Munirathinam, Sophie Sakka, Christine Chevallereau
con 8 of 8 | contact and impact Problems Session Chair: Jinyang Liu
16:20 – 17:40Room V 7.03
An Energy-Momentum Scheme for Frictional Contact in Flexible Multibody DynamicsMarlon Franke, Christian Hesch, Peter Betsch
Friction Modelling and Validation for a Volumetric Contact Dynamics ModelMichael Boos, John McPhee
A Force-Fit Model for Modally Reduced Flexible Bodies Including Contact, Friction and Stick-Slip EffectsDaniel Reischl, Johannes Gerstmayr
Flex 8 of 8 | Flexible multibody systems Session Chair: Jean-Claude Samin
16:20 – 17:40Room V 7.04
About Constraints in Structural and Rigid Body MechanicsSimon R. Eugster, Christoph Glocker
Modeling of Take-Up in the Analysis of Tether Space Mobility DeviceShoichiro Takehara, Y. Kondo
Active Vibration Control of a Flexible Slider-CrankMaria A. Neto, Jorge Ambrósio, Luis M. Roseiro, Ana P. Amaro
tHeo 1 of 4 | theoretical and computational methodsSession Chair: Wojciech Blajer
16:20 – 17:40Room 0.144
A Method of Computing the Hessian Matrix of Loop Closing Conditions for Multibody Dynamics Formulations Based on Relative CoordinatesMakoto Iwamura, Masafumi Nagao
Ill-Conditioning of the Generalized Inertia Matrix of a Dynamical System Using Pivot RatiosSuril V. Shah, Subir Kumar Saha, Jayanta Kumar Dutt
Automatical Transfer Matrix Method of Multibody SystemXiaoting Rui, Jianshu Zhang
A New Numerical Strategy for Handling Quaternion in Dynamic Modeling and Simulation of Rigid Multibody SystemsMahdi Haghshenas-Jaryani, Alan P. Bowling

30
Detailed Technical Program
Keynote | Peter c. müllerkurt Magnus: a Pioneer of Multibody System DynamicsSession Chair: Werner Schiehlen
09:00 – 09:40Room V 7.02
RoB 5 of 6 | Robotics, control and mechatronics Session Chair: Makoto Iwamura
09:50 – 11:10Room V 9.01
Feedforward Control Design From General-Purpose Multibody Analysis for an Original Parallel Robot ConceptMarco Morandini, Pierangelo Masarati, Luca Bargigli, Lucio Vaccani
Inverse Dynamics of Parallel Kinematic Manipulators with Flexible LinksGuaraci Jr. Bastos, Robert Seifried, Olivier Brüls
Three-Dimensional Dynamic Modeling of the Nao Biped Robot with Simplified Equations of Motion in Sagittal and Frontal PlanesEhsan Hashemi, Maani Ghaffari Jadidi
VeH 1 of 5 | Dynamics of All Vehicles Session Chair: Javier Cuadrado
09:50 – 11:10Room V 7.03
Electromechanical Model of Rail VehicleSlawomir Duda
Locomotive Model Acceptance Procedures Based on International StandardsMaksym Spiryagin, Colin Cole, Yan Quan Sun, Andrew George
A Dynamic Formulation for Railroad Vehicles Simulation Using a Trajectory Coordinate SystemAntonio M. Recuero, José L. Escalona, Rosario Chamorro
3D Motion of High Speed Train on Vibrating TracksYoshiaki Terumichi, Tetsufumi Hirano, Kazuhiko Nishimura, Hironobu Sunami, Kiyoshi Sogabe
Bio 2 of 6 | Biomechanics Session Chair: Zdravko Terze
09:50 – 11:10Room V 7.04
Concept of a TransFemoral Prosthesis that Uses Energy Harvested in the Knee to Activate the AnkleArnout Matthys, Pierre Cherelle, Michael Van Damme, Bram Vanderborght, Dirk Lefeber
Model Based Dynamic Analysis of Total Hip Endoprostheses by Means of Hardware-in-the-Loop SimulationMichael Kähler, Roman Rachholz, Sven Herrmann, Janos Zierath, Robert Souffrant, Daniel Kluess, Rainer Bader, Christoph Woernle
Nonlinear Modeling of the Human HearingSebastian Ihrle, Michael Lauxmann, Hans-Peter Zenner, Albrecht Eiber
tHeo 2 of 4 | theoretical and computational methodsSession Chair: Dirk Lefeber
09:50 – 11:10Room 0.144
Constraint Reactions in Multibody Systems with Redundant Nonholonomic ConstraintsMarek Wojtyra, Janusz Frączek
Multibody Dynamics with Redundant Constraints and Singular Mass MatrixJavier García de Jalón, María D. Gutiérrez-López
Natural Coordinates, Cosserat Points and Optimal Control of Multibody SystemsPeter Betsch, Ralf Siebert
Use of Penalty Formulations in the Dynamic Simulation of Redundantly Constrained Multibody SystemsFrancisco González, József Kövecses
31
ThurSDay, May 31, 2012MOrning
Rot 1 of 4 | Dynamics of machines and Rotating structuresSession Chair: Michael Valasek
09:50 – 11:10Room 0.153
Flexible Multibody Systems for Modelling and Simulation of the Turning of Thin-Walled CylindersAchim Fischer, Jorge Ambrósio, Peter Eberhard
Contribution on the Dynamics of Beam Structures with Non-Symmetric Cross SectionsFabian Böck, Stefan Dietz, Oskar Wallrapp
Cylindrical Clearance Linkages in Multibody Dynamics: Contact Analysis and AutomatisationTorben Fruth, Panagiotis Koutsovasilis
Coffee BReak 11:10 – 11:40
RoB 6 of 6 | Robotics, control and mechatronics Session Chair: József kövecses
11:40 – 13:00Room V 9.01
Basic Study on Multibody Dynamics Analysis of the Inverted Pendulum Vehicle and DriverChihiro Nakagawa, Shunsuke Arakawa, Atsuhiko Shintani, Tomohiro Ito
Boundary-Controlled Travelling and Standing Waves in Cascaded Lumped SystemsWilliam J. O’Connor, Ming Zhu
Travelling and Standing Waves in Lumped, Cascaded Systems: the Non-Uniform CaseWilliam J. O’Connor, Ming Zhu
On the Haptic Simulation of Soft-finger Contact Model with RollingGionata Salvietti, Monica Malvezzi, Domenico Prattichizzo
VeH 2 of 5 | Dynamics of All Vehicles Session Chair: aki Mikkola
11:40 – 13:00Room V 7.03
Dynamical Analysis of the HIL MDM Scaled Roller Rig for the Simulation of Wheel-Rail Degraded Adhesion ConditionBenedetto Allotta, Roberto Conti, Monica Malvezzi, Enrico Meli, Luca Pugi, Andrea Rindi
Simulation of Railway Braking Tests under Degraded Adhesion ConditionsBenedetto Allotta, Alessandro Ridolfi, Luca Pugi, Monica Malvezzi, Andrea Rindi, Gregorio Vettori
Development of a Wear Model for the Wheel Profile Optimization in the Railway FieldMirko Ignesti, Lorenzo Marini, Enrico Meli, Andrea Rindi, Paolo Toni
On the Constraint/Elastic Contact Approach for the Analysis of Wheel/Rail Contact Problem of Railroad VehiclesShunpei Yamashita, Hiroyuki Sugiyama

32
Bio 3 of 6 | Biomechanics Session Chair: Christoph Woernle
11:40 – 13:00Room V 7.04
A Model for Computing the Dual Stiffness Matrix of the Human Knee JointCristiano Enea, Ettore Pennestrì, Pier Paolo Valentini
An Analytical Model for Frictionless Contact Between thin Transversely Isotropic Viscoelastic Layers with a Migrating Contact Area: Application to Repetitive Movements of the Knee Joint During WalkingIvan I. Argatov
A Multibody-Based Approach to the Computation of Spine Intervertebral Motions in Scoliotic PatientsGabriel Abedrabbo, Pierre-Antoine Absil, Philippe Mahaudens, Christine Detrembleur, Maxime Raison, Maryline Mousny, Paul Fisette
Design of the AMP-Foot 2.0: An Active Transtibial Prothesis that Mimicks Able-Bodied Ankle BehaviorPierre Cherelle, Arnout Mathijs, Victor Grosu, Branko Brackx, Michael Van Damme, Bram Vanderborght, Dirk Lefeber
tHeo 3 of 4 | theoretical and computational methodsSession Chair: Marek Wojtyra
11:40 – 13:00Room 0.144
Efficient Far-Field Force and Torque Calculations in Multibody-Based Modeling of BiopolymersMohammad Poursina, Jeremy Laflin, Kurt S. Anderson
Modelling and Simulation of the Motion of a Slender Beam in a TubeJacob P. Meijaard, Ronald Aarts, Dannis M. Brouwer
Multibody Domain Decomposition for Parallel Processing: a Wave-Based Approach to Handling Interface DynamicsCraig Smoothey, William J. O’Connor
Sample Based Performance Estimation of a Multibody System Having Uncertain System Parameters with an Arbitrary DistributionChan Kyu Choi, Hong Hee Yoo
Rot 2 of 4 | Dynamics of machines and Rotating structuresSession Chair: Jin hwan Choi
11:40 – 13:00Room 0.153
Transient Analysis of Elevator Governor and Safety Gear MechanismSeiji Watanabe, Mitsuyoshi Imura
Asymmetric Supply Type Hydrostatic Gas Journal Bearings to Decrease the Driving Power of the ACROSS TransmittersTomohiko Ise, Hiroshi Miyatake, Toshihiko Asami
Advanced Engine Dynamics Using MBS and a Mixed Nonlinear FEM and Super Element ApproachYannick Louvigny, Pierre Duysinx
LunCh 13:00 – 14:00
VeH 3 of 5 | Dynamics of All Vehicles Session Chair: Georg Rill
14:00 – 15:20Room V 7.03
Ride Simulation of a Multibody Vehicle Model Including Semi-Active Damping ControlVolker Dorsch
Two-Degree-of-Freedom Control Approach for an Active Suspension SystemOussama Ajala, Dieter Bestle, Jochen Rauh, Karl-Josef Rieger
Development of a Semi-Active Suspension System to Improve Lateral Behavior for a High Speed TrainKyung Seok Sim, Tae Won Park, Jin Hee Lee
Detailed Technical Program
33
ThurSDay, May 31, 2012aFTernOOn
Bio 4 of 6 | BiomecHAnics Session Chair: Paul fisette
14:00 – 15:20Room V 7.04
Optimal Control of Biomechanical Motion Using Physiologically Motivated Cost FunctionsRamona Maas, Sigrid Leyendecker
On the Refinement of Muscular Dynamical Modeling for Muscle Force QuantificationMaria Laitenberger, Mickael Begon, Maxime Raison
A 3D-Model to Estimate Muscle Forces During Human GaitJoaquín Ojeda, Romain Leberre, Javier Martinez-Reina, Juana Mayo
tHeo 4 of 4 | theoretical and computational methodsSession Chair: Peter Betsch
14:00 – 15:20Room 0.144
DAE Index 1 Formulation for Multibody System Dynamics in Lie-Group SettingZdravko Terze, Andreas Müller, Dario Zlatar
Formulation of Kinematic Joints and Rigidity Constraints in Multibody Dynamics Using a Lie Group ApproachValentin Sonneville, Olivier Brüls
Analysis of an Energy Constraint in Post Impact Velocity OptimizationDaniel Montrallo Flickinger, Alan Bowling, Kamesh Subbarao
Computational Structural Analysis of Planar Multibody Systems with Lower and Higher PairsMariano Saura, Ana I. Celdrán, Daniel Dopico, Javier Cuadrado
excursion – mercedes-Benz museum 16:00 – 18:15
conference Dinner – Wilhelma 18:45 – 23:00

34
Keynote | olivier BauchauIntrinsic Time Integration Procedures for Rigid Body DynamicsSession Chair: ettore Pennestrì
09:00 – 09:40Room V 7.02
VeH 4 of 5 | Dynamics of All Vehicles Session Chair: arend Schwab
9:50 – 11:10Room V 7.03
Dynamic Analysis of Tracked Vehicle Suspension SystemSlawomir Kciuk
Automatic Frequency Response Function Calculation in a Multi-Body Solver and its Application for Road Load Prediction for Fatigue Analysis on Passenger VehiclesAlessandro Toso, William C. Prescott, Stefano Candreva, Joris De Cuyper
6x6 Off-Road Vehicle Simulations for Vibration Energy Regeneration using Active Suspension SystemsJae Yong Kim, Wan Hee Jeong, Sung-Soo Kim
A Simplified Soil Contact Formulation for the Dynamic Simulation of Off-Road VehiclesTariq Z. Sinokrot, Alan Lewis, William C. Prescott
Bio 5 of 6 | BiomecHAnics Session Chair: Jorge ambrósio
9:50 – 11:10Room V 7.04
Two Approaches to Estimate Foot-Ground Contact Model Parameters Using Optimization TechniquesRosa Pamies-Vila , Josep M. Font-Llagunes, Urbano Lugrís, Javier Cuadrado
Joint Efforts Calculation in the Gait of Incomplete Spinal Cord Injured SubjectsUrbano Lugris, Jairo Carlin, Florian Michaud, Javier Cuadrado
Dynamic Analysis of Foot Models for Human LocomotionFarnood Gholami, József Kövecses, Josep M. Font-Llagunes
Marker Based In-Vivo Analysis of 3D Spinal Motion During Gait Using Spline CurvesDietmar Rosenthal, Alejandro A. Espinoza Orias, Harald Hefter, Gunnar Andersson, Markus A. Wimmer, Andres Kecskeméthy
Rot 3 of 4 | Dynamics of machines and Rotating structures Session Chair: klaus Dreßler
9:50 – 11:10Room 0.153
A Periodic Input-Output Stability Analysis Method for Complex Multibody Systems with Applications to Wind Turbine Aero-Servo-ElasticityCarlo L. Bottasso, Stefano Cacciola, Alessandro Croce
Modelling and Analysis of Friction Effects in the Rotating Blades DynamicsMichal Hajžman, Miroslav Byrtus, Vladimír Zeman
Dynamics of a Controlled Flexible Multibody Model of a 2 MW Wind TurbineRoman Rachholz, Christoph Woernle, János Zierath
Stability Analysis of a Rotating Wind Turbine Blade Undergoing Gravitational ForceSeung Min Kwon, Hong Hee Yoo
Coffee BReak 11:10 – 11:40
VeH 5 of 5 | Dynamics of All Vehicles Session Chair: olivier Bauchau
11:40 – 13:00Room V 7.03
Symbolic Modeling of VehiclesRoberto Lot, Matteo Massaro
Vehicle Modeling by Non-Perfect Multibody SystemsGeorg Rill
A Multibody Model of a Formula Student Car – On-Track Validation and Set-up OptimizationRiccardo Bartolozzi, Francesco Bucchi, Francesco Frendo
Minimal Requirements of Multibody Pantograph Models for Railway Pantograph-Catenary Contact InteractionJorge Ambrósio, Joao Pombo
Detailed Technical Program

35
FriDay, June 1, 2012MOrning anD aFTernOOn
Bio 6 of 6 | BiomecHAnics Session Chair: evtim Zahariev
11:40 – 13:00Room V 7.04
Multibody Analysis of Rotorcraft-Pilot CouplingVincenzo Muscarello, Pierangelo Masarati, Giuseppe Quaranta
Improvement of the Railway Coach Interior Occupant ProtectionMarta Carvalho, Joao Milho, Jorge Ambrósio
Rider Control Identification in Bicycling, Parameter Estimation of a Linear Model Using Lateral Force Perturbation TestsArend Schwab, Peter de Lange, Riender Happee, Jason K. Moore
Investigation of Biomechanical Behavior of Automotive Pedal Actuation using Motion Analysis TechniqueYounghwan Kim, Dongchan Kim, Kyungho Kim, Taeoh Tak
Rot 4 of 4 | Dynamics of machines and Rotating structures Session Chair: Martin arnold
11:40 – 13:00Room 0.153
Improved Physically-Oriented Model of the Spur Involute Gear DynamicsIvan I. Kosenko, Ilya K. Gusev
Correlation of the Instability Conditions and Relevant Design Parameters in Multiple Pinion DrivesHaidong Yu, Peter Eberhard, Yong Zhao, Hao Wang
Modeling and Validation of a Dynamic Model of a Yawing Mechanism for Load-Sharing AnalysisShaoping Bai, Morten Haastrup, Pascal Rigal
LunCh 13:00 - 14:00
Keynote | Aki mikkolaDevelopments and future outlook of the absolute nodal Coordinate formulationSession Chair: Pascal Ziegler
14:00 – 14:40Room V 7.02
closing session 14:40 – 15:20Room V 7.02
36
Notes
37
Notes
38
Notes

Imprint
Organized by | University of Stuttgart, Institute of Engineering and Computational Mechanics, Pfaffenwaldring 9, 70569 Stuttgart, Germany E-Mail: [email protected] Phone: +49 (0)711 685 66388 Fax: +49 (0)711 685 66400
Chairman | Prof. Dr.-Ing. Peter Eberhard
Conference Secretary | Dr.-Ing. Pascal Ziegler
Editorial | Heidi-Maria Götz, Dr.-Ing. Pascal Ziegler
Design | Tina Barthelmes
Photos | University of Stuttgart, University of Stuttgart / Cichowicz, Stuttgart-Marketing GmbH, Daimler AG, Wilhelma
Maps | Bundesamt für Kartographie und Geodäsie / Frankfurt am Main / 2012, Stadtmessungsamt / Landeshauptstadt Stuttgart / 2012
Version | 21-5-2012
For more informationwww.itm.uni-stuttgart.de/imsd2012