Embed Size (px)
Citation preview

1
Abstract— In recent years, software defined radio and digital
signal processing have been widely used in communication and
radar. As a result, the hardware and RF front-end for radar and
wireless communication tends to be similar. Thus, using the same
RF and hardware platform for joint radar-communication
becomes viable. Joint radar-communication would bring more
efficient plan and usage for the radio spectral resource.
Furthermore, it could enable new applications that require
information exchange and precise localization at the same time. In
this paper, cyclic prefixed single carrier (CP-SC) and its variations
are chosen as the waveforms for joint radar-communication. CP-
SC waveform and its variations are popular in wireless
communication and have been chosen by a few standards like
IEEE 802.11ad and LTE-advanced. Efficient algorithms are
proposed to use such waveforms for range and speed
detection/estimation of targets. The proposed algorithms are
derived from the maximum likelihood (ML) principle and have
low computational complexity. Simulations show that the
estimation performance of the proposed method is almost the same
as that of ML and is much better than that of the channel
estimation based method.
Index Terms— Radar; Communication; Localization; IOT; CP-
SC: SCCP; SC-FDE; PCP-SC; UW-SC; SC-OFDMA; OFDM
I. INTRODUCTION
Context-awareness is critical in many applications including
environmental monitoring, intelligent transportation,
healthcare, logistics, and smart home/building, etc. Internet of
Things (IoT) is an enabler to and beneficiary of context-aware
information [1-2], in which location/position information is of
particular importance. Radar is one of the most popular ways to
obtain location information. Traditionally, dedicated radio
frequencies are allocated for radar [3-4]. Radar waveforms are
also specially designed to optimize the range and speed
detection performances [3-4]. In addition, hardware and
software used for radar are different from those for wireless
communications [3-4]. In recent years, there have been
increased researches on using the same device and same radio
spectrum for joint radar-communication [5-13]. In fact, with the
increasing usage of software defined radio and digital signal
processing [5], the hardware and RF front-end for radar and
wireless communication tends to be similar. Thus, using the
This work is supported by the A*STAR Industrial Internet of Things
Research Program, under the RIE2020 IAF-PP Grant A1788a0023 and
A*STAR ETPL Gap-funded project “mmWave Radar-Camera Sensor Fusion
Module”.
same RF and hardware platform for joint radar-communication
becomes viable [5-7].
A. Advantages and challenges of joint radar-communication
Some advantages of joint radar-communication are listed as
follows:
• Save resources and reduce cost.
• Allow more efficient plan and usage for the radio spectral resource.
• Enable new applications that require information exchange and precise localization at the same time.
However, there are many special difficulties in joint radar-
communication by using standardized waveforms. Some major
challenges are as follows.
• Detection/estimation algorithms that can efficiently use the standardized waveforms. Unlike conventional radar operation where the waveform is optimized for range/speed detection/estimation performance [3-4], the standardized waveforms are optimized for communication performance. Thus conventional detection/estimation algorithm may not be suitable for joint radar-communications. New detection/estimation algorithms need to be designed.
• Full duplexing operation: communication transmission and radar receiving are at the same time, which induces strong self-interference to the radar receiver. Compared to dedicated radar system, communication system is more compact, which means that the self-interference is much more severe. Although the transmitted signal is known to the radar receiver, the channel between the transmitter and radar receiver is unknown, which makes the interference cancellation complicated.
• Reducing system complexity to share the same hardware and software for radar and communication as long as possible.
B. Overview of related works
Joint radar-communication in a relatively new research area.
There have been researches on this topic in recent years [5-13].
In [5-7], excellent reviews are presented on this topic with
emphasizes on the orthogonal frequency division multiplexing
(OFDM) or multi-tone waveforms. In [8-11], radar
The authors are with the Institute for Infocomm Research, A*STAR, 1
Fusionoplis. Way, #21-01 Connexis, Singapore 138632. Emails: {yhzeng,
mayg, sunsm}@i2r.a-star.edu.sg
Joint Radar-Communication with Cyclic
Prefixed Single Carrier Waveforms
Yonghong Zeng, Fellow, IEEE, Yugang Ma, Senior member, IEEE and Sumei Sun, Fellow, IEEE

2
detection/estimation algorithms are proposed for cyclic
prefixed OFDM (CP-OFDM), which use channel estimation
and block processing based on the special structure of CP-
OFDM. In [12], auto-correlation based method is used for radar
detection by using the IEEE 802.11ad waveform, which relies
on the excellent auto-correlation property of the preamble
sequence in IEEE 802.11ad. In [13], methods are proposed to
achieve superior detection resolution for IEEE 802.11p
waveform. However, the method can only be applied for single
target scenario.
There have been extensive researches on radar
detection/estimation without considering communication. Most
of such works are for dedicated waveforms optimized for radar.
Especially, super-resolution radar has been studied to identify
closely placed objects. The multiple signal classification
(MUSIC) or subspace method is one of the most popular
methods for super-resolution radar [28-31]. MUSIC can be used
for direction of arrival (DoA) estimation with multiple
antennas, speed estimation, or range estimation in some cases
[28-31]. However, MUSIC has high complexity (eigen-
decomposition and large number of matrix-vector
multiplications), and is sensitive to order estimation, especially
when the number of targets is large. Moreover, MUSIC usually
can only estimate a single parameter (DoA or speed or range)
at one time [28-31]. It does not offer a joint estimation for
multiple parameters, which leaves a difficult pairing problem
(for example, after separate range and speed estimation, it is
difficult to pair the estimated range with the estimated speed).
In recent years, compressive sensing (CS) has been used in
radar, especially for multiple input multiple output (MIMO)
radar [32-36]. CS can be used for different radar tasks. One
major application is to considerably reduce the sampling rate
(much lower than the Nyquist sampling rate) with sparse
sampling (reducing A/D conversion bandwidth) [32], which is
special helpful to ultra wideband radar. Another important
application is to achieve super-resolution, especially for DoA
estimation in MIMO radar [33-35]. The latest atomic norm
minimization method is a promising technique for this purpose
[35]. However, CS method in general has high complexity and
poor robustness in low signal-to-noise ratio (SNR).
Furthermore, its performance may degrade considerably in the
presence of basis mismatch [36].
In the joint radar-communication scenario, reducing the
sampling rate for radar receiver may not be that important, as
the same sampling device should also be used for
communication purpose.
C. Our contributions
Cyclic prefixed single carrier (CP-SC) is a popular modulation
scheme, which has lower peak to average power ratio (PAPR)
than OFDM while achieving similar performance [14-15]. CP-
SC is also called: single carrier with cyclic prefix (SCCP) or
single carrier with frequency domain equalization (SC-FDE)
[15]. CP-SC or its variations have been chosen by a few
standards like IEEE 802.11ad [27], LTE-advanced and C-V2X
(singe carrier frequency division multiple access (SC-FDMA)
is used) [23], and are also possible candidates for the 5G [24-
25].
In this paper, efficient algorithms are proposed to use CP-SC as
radar waveforms for joint range and speed detection/estimation
of targets. Although the method for OFDM radar based on
channel state information (CSI) can be extended for CP-SC
radar, the performances are degraded substantially due to the
difficulty of channel estimation in CP-SC. In fact, for OFDM,
there are simple and efficient channel estimation methods (for
example, the 1-tap least square channel estimation) that divide
the frequency domain signal by the transmitted signal [16-17].
However, the similar channel estimation method for CP-SC
needs to divide the discrete Fourier transform (DFT) of the
transmitted signal, which may have zero (or near zero)
coefficients. The zero (or near zero) coefficients make the
channel estimation unreliable. Although there are other channel
estimation methods with better accuracy [16-19] (for example,
the time domain channel estimation method), the complexity is
usually much higher. As the range and speed detections need to
have the channel estimation at every block, we cannot afford to
use high complexity channel estimation here. Thus, in this
paper, a new approach, referred to as “Fast Cyclic Correlation
Radar (FCCR)”, is proposed which does not require channel
estimation. The proposed FCCR method first uses a cyclic
correlation (circularly correlate the received signal with the
transmitted signal) at each block. Then it implements a DFT on
the processed signal along the blocks for each time index. After
these two steps, a two-dimensional (2D) range-Doppler matrix
(RDM) is produced. Based on the RDM, existing constant false
alarm (CFAR) algorithms can be used to detect the existence of
targets and estimate the range and speed of the targets. It is
verified that the algorithm is an approximation to the maximum
likelihood (ML) estimation. Simulations show that the
estimation performance of the FCCR is almost the same as that
of ML and is much better than that of the channel estimation
based method.
The proposed method can be directly used for similar
waveforms like pilot cyclic prefixed single carrier (PCP-SC)
[20, 21], unique-word based single carrier (UW-SC) [19], zero-
padded single carrier (ZP-SC) [22], and SC-FDMA [23].
The major contributions of this paper are summarized as
follows.
• First to propose fully using the CP-SC signal for joint
radar and communication. The CP-SC and its variations are
very popular waveforms in communications, but their usage for
radar is barely studied before. In [12], a correlation (matched
filtering) method is proposed for radar detection/estimation
based on IEEE 802.11ad standardized UW-SC (a variation of
CP-SC). The method only uses the preamble of the signal for
radar detection/estimation. We propose to use all the
transmitted signal (including the preamble and data) for radar
detection/estimation, which is more robust to noise and
interference. The algorithm can be directly applied to PCP-SC,
UW-SC, ZP-SC, and SC-FDMA radar.
• Proposed a near ML “Fast Cyclic Correlation Radar”
algorithm for joint range and speed detection/estimation based
on CP-SC and its variations. It is shown that the algorithm is an

3
approximation to the ML estimation, hence substantially better
than the channel estimation based method.
• The proposed FCCR algorithm has low and affordable
complexity.
The remaining part of the paper is organized as follows. The
system model is given in Section II. In Section III, a channel
estimation based radar algorithm is briefly discussed. The
FCCR algorithm and the separate range-speed estimations are
proposed in Section IV. A simple CFAR detection is discussed
in Section V. Simulations are shown in Section VI. Finally,
conclusions and future researches are given in Section VII.
II. USE CASES AND SYSTEM MODEL
A. Use cases
There are many use cases for joint radar-communication.
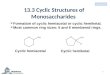
Here we show two application scenarios in Fig. 1:
(1) Vehicle to vehicle (V2V) communication and
localization: Source vehicle sends information to the target
vehicle and at the same time use the reflected signal to localize
the target vehicle. This can be used for collision avoidance,
hence improve the driving safety.
(2) Video broadcasting and localization: the intelligent
server broadcasts video to the children and obtains the accurate
position and gesture of the children using the reflected signal.
The position and gesture information can then be used to timely
adjust the video content.
Fig. 1. Use case examples of joint radar-communication
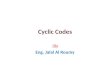
Fig. 2. Overall structure for joint radar-communication
B. System model
The overall structure for joint radar-communication is shown
in Fig. 2. The communication transmitter (TX) generates a
signal based on a communication standard and sends it to
targets via a TX antenna. The receiver (RX) can be used for two
purposes: radar detection or conventional communication
(demodulation and decoding), but not at the same time. When
the radio signal reaches a target, it is bounced back to the
receiver antenna, which captures the reflected signal. Thus, the
receiver can use the reflected signal from the target to detect the
range and speed of the target. Unlike conventional radar, here
the transmitted signal contains useful information (modulated
data) for the targets (like the cars in front), and uses the
standardized communication waveform. The data transmission
and radar processing are at the same time. As seen in the figure,
the transmitter chain and most parts of the receiver chain are
shared by radar and communication.
The system model is described as follows. Let ���� be the
baseband transmitted signal. The passband analog signal is
���� � R�������� �������, ⑴
where �� is the carrier frequency, � is the initial phase, and R��∙� means the real part. The signal reflected from targets is
received at the receiver. Assume that there are � reflectors
(targets). The received passband signal is:
����� � � ��R���� � ���� ����!"���#$"����%"�&
�'(, ⑵
where �� is the attenuation coefficient of reflector *, � is the
round-trip delay of reflector *, +� is a phase error, and ,� is the
Doppler frequency shift induced by the moving of reflector *. The Doppler shift can be expressed as
,� � �-"� �� , ⑶
where .� is the relative speed of the reflector (target) and / is
the speed of light. Down-converting the signal into baseband
and sampling it, we get the baseband discrete signal as
��012� � � ℎ���012 � ��&
�'(�� 4!"56 . ⑷
where ℎ� � ��#�� ����!"�$"���%" is the complex channel gain
of reflector * (random phase error is absorbed into this term as
well), and 12 is the sampling period. Radar receiver is to find
the delay � (corresponding to range) and Doppler shift ,� (corresponding to the relative speed).
Let 8� � �/12 , :� � ,�12. Note that 8� � �/12 may not be an
integer. If so, we choose 8� as the nearest integer to �/12 . To
simplify notations, in the following we denote ��012� by ��0�,
and ��012� by ��0�. Note that noise is not included in the
equations above. With the noise (denoted by ;�0�) included
and simplified notations, we have

4
��0� � � ℎ���0 � 8��&
�'(�� 4<" + ;�0�, 0 � 0,1, … . ⑸
The above model is applicable to any waveform. Here and after,
we assume that the transmitted time domain signal has a “block
structure” and each block has a CP. The signal ��0� is
composed of A blocks with each block having a length of BC � B + B�, where B is the length of data block and B� is the
length of CP. Note that ��0� can be precoded like that in SC-
FDMA [23]. In each block, the first B� symbols (the CP) are
the repetition of the last B� symbols. OFDM and CP-SC are the
two most popular waveforms with this structure. To cater for
this structure, we divide the received discrete signal ��0� into
blocks of length BC. In each block, the first B� elements
(corresponding to the CP of that block) are discarded. The block D (after discarding the CP) is denoted as �E�0�, 0 �0,1, … , B � 1, D � 0,1, … , A � 1. Assume that the normalized
delay is always smaller than the CP length:
8� ≤ B�. ⑹
Then the received signal can be expressed as
�E�0� � � ℎ��E�⟨0 � 8�⟩I�&
�'(�� EIJ�IK�4�<" + ;E�0�
� � ℎL��E�⟨0 � 8�⟩I��� 4<"&
�'(�� EIJ<" + ;E�0� ⑺
where ℎL� � ℎ��� IK<". Here and in the following, we use ⟨0⟩M
to denote the remainder of 0 modulo N:
⟨0⟩M � 0 mod N. ⑻
Note that the structure of PCP-SC [20, 21] or UW-SC [19,
27] is slightly different from that of CP-SC, where the CP is
replaced by a fixed sequence called PCP or UW. For PCP-SC
or UW-SC, equation (7) should be revised as
�E�0� � � ℎL��E⟨0 � 8�⟩IJ��� 4<"&
�'(�� EIJ<" + ;E�0�,
0 � 0,1, … , BC � 1, D � 0,1, … , A � 1. ⑼
III. CHANNEL ESTIMATION BASED RADAR
ALGORITHM
Here we consider equation (7) based on CP-SC waveform
(extension to PCP-SC or UW-SC is direct based on equation
(9)). Let RE�S� be the DFT of �E�0�, and TE�S� be the DFT of �E�0�. In OFDM system, TE�S� is simply the input frequency
domain signal at block D and subcarrier S. In CP-SC, an
additional FFT is required to transform the time domain signal
into frequency domain signal. After simple mathematical
derivation, we have
RE�S� � � �� EIJ<" � U��V�ℎL�I#(
�'WTE�⟨S � V⟩I�&
�'(
∙ #�� �X#��Y"I +ZE�S� ⑽
where ZE�S� is the DFT of ;E�0�, and
U��S� � � �� 4�X#<"�II#(
4'W� 1 � �� �X#<"�
1 � �� �X#<"�I , ℎL� � ℎ��� IK<"
⑾
Equation (10) can be rewritten as
RE�S� � � ℎL�#�� XY"I �� EIJ<"&
�'([E,��S� + ZE�S� ⑿
where
[E,��S� � � U��V�I#(
�'W�� �Y"I TE�⟨S � V⟩I�.
Note that :� is the normalized Doppler shift: :� � �-"56��� . It is
usually a very small value. If it is small enough: :� ≈ 0, we
have U��S� ≈ 0, for 1 ≤ S ≤ B � 1, and U��0� ≈ B. Thus [E,��S� ≈ BTE�S�. Hence, we have the approximation for
small Doppler shift case as
RE�S� � BTE�S� � ℎL�#�� XY"I �� EIJ<" + ZE�S�. ⒀&
�'(
This simplified model is also used in [8-11]. However, we
should keep in mind that it is only an approximation.
Note that ∑ ℎL�#�^_`a"b �� EIJ<"&�'( is the frequency domain
channel (the round-trip channel) at block D and subcarrier S. TE�S� is the DFT of the transmitted signal at block D, which is
known at the receiver. As shown in [8-11], the range and speed
information are included in the frequency domain channel and
can be extracted with very efficient algorithms. If we can obtain
the channel, the methods in [8-11] can be directly used here to
find the range and speed.
Since TE�S� is known, the channel can be found. As an
example, we can simply use the zero-forcing (ZF) (also called
least square (LS)) method to obtain the channel as:
c�S, D� ≜ RE�S�BTE�S� � � ℎL�#�� XY"I&
�'(�� EIJ<" + Ω�S, D� ⒁
S � 0,1, … , B � 1; D � 0,1, … , A � 1, where Ω�S, D� � ZE�S�/BTE�S� is the noise of the estimated
channel at block D and subcarrier S.
However, in general the accuracy of the channel estimation in
a data block for CP-SC is much worse than that for OFDM. In
fact, the accuracy of the channel estimation is largely dependent
on TE�S�: the DFT of the transmitted signal �E�0�. At a given
data block D, if the amplitudes of TE�S� for some S are very

5
small, the channel estimation will be very bad at this block. On
the other hand, in OFDM, TE�S� is simply the input frequency
domain signal at block D and subcarrier S, whose amplitudes
do not vary much. Thus, in OFDM, the simple one-tap channel
estimation can have good performance.
Although there are other channel estimation methods with
better accuracy [18-19] (for example, the time domain channel
estimation method with the assumption of limited channel taps),
the complexity is usually much higher. We cannot afford to
high complexity channel estimation here as the channel
estimation must be done at every block.
IV. CHANNEL ESTIMATION-FREE ALGORITHMS
In this section, a channel estimation-free approach for range and
speed detection/estimation, referred to “Fast Cyclic Correlation
Radar (FCCR)”, is proposed.
A. Cyclic correlations
Let the cyclic correlation of the received signal and the
transmitted signal be
g�0, D� � � �E�V��E∗ �⟨V � 0⟩I�I#(
�'W, 0 � 0,1, … , B � 1. ⒂
After simple mathematical derivations, we have
g�0, D� � � ℎi�j�⟨0 � 8�⟩I , D��� EIJ<" + k�0, D�, ⒃&
�'(
where k�0, D� is the noise,
j�0, D� � � �E�V��E∗ �⟨V � 0⟩I��� �<" , ⒄
I#(
�'W
ℎi� � ℎL��� Y"<" , 0 � 0,1, … , B � 1. ⒅
Note that in general j�0, D� is also related to *. In practice, the
normalized Doppler shift :� is very small. Hence the term �� �<" can be ignored in the above equation. Thus we have
j�0, D� ≈ � �E�V��E∗ �⟨V � 0⟩I�I#(
�'W. ⒆
Obviously, for fixed D, the maximum value of |j�0, D�| appears at 0 � 0. Thus |g�0, D�| will have peaks at 0 � 8�, which indicate the ranges of the targets.
B. Joint estimation of range and speed
Assume that the noise samples have Gaussians distributions,
and the noises at different time and different block are
independent and identically distributed. Then it is easy to show
that the maximum likelihood (ML) estimation for the ranges
and speeds are
arg min�Y",<"� � � |g�0, D�r#(
E'W
I#(
4'W� � ℎi�j�⟨0 � 8�⟩I , D��� EIJ<"
&
�'(|� ⒇
To simplify the problem, firstly we consider the case of one
target, that is � � 1. The ML estimation is simplified as
�8(, :(� � arg min�Y,<� 1ℎi, 8, :�, �21�
where
1ℎi, 8, :� � � � |g�0, D�r#(
E'W
I#(
4'W� ℎij�⟨0 � 8⟩I, D��� EIJt|�. �22�
This term can be expanded as
1ℎi, 8, :� � � � |g�0, D�r#(
E'W|�
I#(
4'W
+|ℎi|� � � |j�⟨0 � 8⟩I, D�r#(
E'W|�
I#(
4'W
�2R� uℎi∗ � � g�0, D�j∗�⟨0 � 8⟩I , D�r#(
E'W
I#(
4'W#�� EIJ<v. �23�
Obviously the first term is not related to the �8, :� at all. Thus,
it can be ignored. The second term can be turned to
|ℎi|� � � |j�0, D�r#(
E'W|�
I#(
4'W. �24�
It is also not related to �8, :� and can be ignored. Hence, the ML
estimation is simplified to the maximization of the third term.
Note that, in the third term, there is a parameter ℎi, which is the
unknown complex channel gain and not related to �8, :�.
Following the derivation in [8, 26], we can obtain the ML
estimation for �8(, :(� without the parameter ℎi as follows:
�8(, :(� � arg max�Y,<� Φ� 8, :�, (25)
where
Φ� 8, :� � {� � g�0, D�j∗�⟨0 � 8⟩I , D�r#(
E'W
I#(
4'W#�� EIJ<{ . �26�
Although it is simplified considerably, the maximization above
still needs two-dimensional (2D) search. Especially the solution
for the speed requires exhaustive search in non-integer points.
We can simplify the maximization further as follows. Firstly,
note that j�0, D� is the auto-correlation of the random input
sequence at block D. Thus, the cross terms j�0, D� �0 ≠ 0� are
generally small. For simplicity, we set
j�0, D� � V, 0 � 0; j�0, D� � 0, 0 ≠ 0. (27)
That is, j�0, D� � Vδ�0�, where δ�∙� is the Dirac delta
function. By this approximation, we have
�8(, :(� � arg max�Y,<� Ψ� 8, :� (28)
where
Ψ� 8, :� � {� � g�0, D�r#(
E'W
I#(
4'W��⟨0 � 8⟩I�#�� EIJ<{. �29�

6
This eliminates the necessity to compute the auto-correlations j�0, D� completely. However, 2D exhaustive search is still
required. To reduce the search complexity, we can constrain the
search points for the speed to: : � Xr�IJ, S � 0,1, … , A( � 1,
where A( � �A with � being a positive integer number. Let the
discrete Fourier transform of g�0, D� on the second dimension
be
��0, S� � � g�0, D��#� EXr�r#(
E'W. �30�
Then
Ψ � 8, SA(BC� � {� ��⟨0 � 8⟩I���0, S�I#(
4'W{ � |��8, S�|. �31�
Finally, the ML is approximated by the maximization �0(, S(� � arg max�4,X�|��0, S�|. (32)
The normalized range and speed are then obtained as: 8( � 0(,
and :( � S(/�A(BC�.
The method can be directly used for the general cases with
multiple targets as well, where the largest � points are found as
the estimations to the normalized ranges and speeds of the �
targets. The validation of the method can be seen from another
angle. In fact, in the general case of � targets, we have
��0, S� � � ℎi�&
�'(� j�⟨0 � 8�⟩I , D��#� E�X#r�IJ<"�r�r#(
E'W. �33�
Similar to the definitions in [37], we call ��0, S� in (30) the
range-Doppler matrix (RDM), though here the RDM is
different. Based on the RDM, we can use existing CFAR
algorithms to detect the existence of target and estimate the
range/speed of target [37-38]. Obviously, the peaks of |��0, S�| are at following points:
�0�, S�� � �8� , A(BC:��, * � 1, … , �, (34)
if A(BC:� and 8� are positive integer numbers. Please note that
the speed can be negative. For negative :� , the peak point
appears at �8�, A( + A(BC:��. To guarantee that both positive
and negative speed can be resolved, we must constrain
A(BC:� < A(/2, or BC:� < (� . (35)
If they are not integer numbers, approximations of �8� , :�� are
found from the peak points of |��0, S�|. From the estimated normalized values, finally we get the
estimations for the delays and speeds as follows:
� � 0�12 , * � 1, … . �, (36)
.� � S�//�2A(BC��12�, if S� < A(/2, (37)
.� � �S� � A(�//�2A(BC��12�, if S� ≥ A(/2. (38)
The cyclic correlation can be computed by FFT. In fact, let RE�S� be the DFT of �E�0�, TE�S� be the DFT of �E�0� and [�S, D� be the DFT of g�0, D�. Based on the cyclic
convolution theorem, we have
[�S, D� � RE�S�TE∗ �S�. (39)
Then g�0, D� is the inverse DFT of [�S, D�:
g�0, D� � 1B � RE�S�TE∗ �S��� 4XII#(
X'W. �40�
The method is called Fast Cyclic Correlation Radar (FCCR),
which is summarized as follows.
• Compute the cyclic correlations g�0, D� by FFTs as described in (39) and (40).
• Compute the FFTs of g�0, D� to get the RDM ��0, S� as described in (30).
• Based on |��0, S�|, determine which points are targets. This can be done by using a CFAR detection [37-38], which will be discussed further in Section V.
• Estimate the range and speed of each detected target as described in (36) to (38).
For fixed D, the computation of g�0, D� needs 2 FFTs and one
inverse FFT (IFFT). Thus the total computational complexity
for g�0, D� (0 � 0,1, … , B � 1; D � 0,1, … , A � 1� is O�ABlog��B��. The computation of ��0, S� needs B FFTs of
length A(. The computational complexity is O�A(Blog��A(��.
The 2D search of maximum points on |��0, S�| needs O�A(B�
operations. Thus the overall complexity is O�A(B�log��A(� +ABlog��B��.
C. Separate estimation of range and speed
Although the joint estimation offers nearly optimal
performance, the complexity and memory requirement are high.
To reduce memory and complexity, we can estimate the two
parameters separately. This is especially useful when only the
range or speed information is needed. The method is briefly
discussed as follows. As shown in equation (16), g�0, D� can
be used for separate range estimation at any D. As the speed is
unknown, we cannot coherently combine g�0, D� for different D. Thus, here we use a non-coherent power combine. Similarly,
as shown in equation (33), ��0, D� can be used for separate
speed estimation at any 0. Let
��0� � 1A � g�0, D�g∗�0, D�, �41�r#(
E'W
��D� � 1B � ��0, D�I#(
4'W�∗�0, D�. �42�
Then the round-trip ranges are found from the peak points of ��0�, and the relative speeds are found from the peak points of ��D�. The computation of g�0, D� and ��0, D� are the same
as above. The method only needs 1D search, which reduces
searching complexity. Furthermore, we do not need to save ��0, D� as we only need ��D�. Thus, it reduces the memory
considerably. In fact, the required memory is only O�AB�. The
comparison of complexity and memory for separated, FCCR
and ML are shown in TABLE I.

7
TABLE I. COMPARISON OF COMPLEXITY AND MEMORY
Method Complexity Memory
Separated
estimation
O�A(B�log��A(� + ABlog��B�� O�AB�
FCCR O�A(B�log��A(� + ABlog��B�� O�A(B�
ML O�A(B�A� O�A(B�
Separate range-speed estimation has a common problem: how
to pair the range and speed? From equation (16) and (33), we
can see that the peak points of |��0�|� and |��D�|� are
proportional to |ℎi�|� (reflected signal strength of the target *).
That means, the higher power peak in |�(0)|� should be paired
with the higher power peak in |�(D)|�. Thus we can use a
simple pairing method as follows. Let 0X and DX be the
detected range index and speed index in (41) and (42),
respectively. Reorder |�(0X)|� and |�(DX)|� respectively in
desending order. Then the range index in the reordered
|�(0X)|� is paired with the speed index in the reordered
|�(DX)|�. However, if the reflected signal strengths of different
targets are the same, the paring could lead to wrong range-speed
match.
D. Error bounds
As the algorithms are based on the sampled signal and the
delay/speed are estimated after sampling, the estimation
accuracies are inevitably limited by the sampling rate and the
FFT size. Let �� be the sampling rate. The sampling period is
12 = 1/��. As the detected time delay must be integer multiples
of the sampling periods, thus the absolute error of detected
round-trip delay is bounded by 12/2 at noise-free case. Hence,
the absolute error of range detection at noise-free case is evenly
distributed in [0,�56
�) , where / is the speed of light. The average
absolute error of range detection is �56
� at noise-free case. Due
to the similar reason, the absolute error of speed detection at
noise-free case is evenly distributed in[0,�
��5), where � is the
wavelength, � is the over-sampling factor for speed (see
definition above the equation (30)), and 1 is the total time
duration of the transmitted signal. Thus, the average absolute
error of speed detection is �
��5 at noise-free case. The error
values are summarized in Table II.
TABLE II. ERRORS FOR RANGE AND SPEED ESTIMATIONS (AT NOISE-FREE CASE)
Absolute error interval Average absolute error
Range
estimation [0,/12
4)
/12
8
Speed
estimation [0,�
4�1)
�
8�1
E. Practical considerations
To keep the signal within the given bandwidth with required
out-of-band (OOB) emission, usually we need to filter the
transmitting signal. The filtering will induce delay and inter
symbol interference (ISI). Thus, the effective channel is the
convolution of the actual propagation channel and the filter.
This will affect the radar performance.
V. TARGET DETECTION
Before the target range and speed estimation, we need to
determine if a given point is a true target or not. In general, a
CFAR detection is used for this purpose [37-38]. There have
been a lot of researches for the CFAR detections [37-38]. As
long as the 2D RDM is given, existing CFAR detections can be
readily used [37-38]. As the focus of this paper is on the RDM
generation and range/speed estimation accuracy, here we use a
simple 2D cell average CFAR detection for evaluation purpose
[37]. The method is summarized in the following.
Let Ε(0, S) be the RDM of the received signal. Note that, for
the FCCR method, Ε(0, S) = �(0, S); for the channel
estimation based method, Ε(0, S) = Υ(0, S), the 2D FFT of
c(S, D) in (14) [8, 11]; and for the ML method, Ε(0, S) =Φ(0, S) in (26). Let Ω be a given 2D cell (a 2D region within
the area [0, B − 1] × [0, A( − 1]) centered at (0, S). Let Θ� be
average value of |Ε(0, S)|� in the 2D cell excluding (0, S),
which can be treated as the noise power estimation in the cell.
For the given point (0, S), the CFAR detection is
Η(: |�(4,X)|^
��> Γ¢; ΗW:
|�(4,X)|^
��≤ Γ¢
where Η( is the hypothesis for (0, S) being a true target, ΗW is
the hypothesis for (0, S) being a clutter or noise point, and Γ¢
is a threshold.
For a given probability of false alarm (Pfa), the threshold Γ¢ can
be found by theoretic closed-form expression or through
Monte-Carlo simulations (in general). To save space, we will
not discuss the theoretic threshold setting here. We set the
threshold through simulations. The Pfa is a constant value at
any noise levels for a given threshold Γ¢ [37].
VI. SIMULATUIONS
Two waveforms are considered in the simulations: (1)
Standardized IEEE 802.11ad single carrier [27], which is based
on UW-SC modulation; (2) A self-defined waveform, which is
based on CP-SC modulation. The waveform and algorithm
parameters are shown in TABLE III. To simulate fractional
time delay and filtering, we first use a sampling rate that is four
times the symbol rate. The insertion of time delay and filtering
are done at this higher sampling rate. After this, the signal is
down-sampled to the basic symbol rate and all the
detections/estimations are conducted at the symbol rate. For
both cases, lowpass filters (root raised cosine filter with roll-off
factor 0.2) at both transmitter side and receiver side are used to
keep the signal within the given bandwidth.
TABLE III. WAVEFORM AND ALGORITHM PARAMETERS
IEEE 802.11ad Self-defined

8
Carrier frequency 60.48 GHz 5.9 GHz
Bandwidth 1.825 GHz 50 MHz
Symbol rate 1.76 GHz 48 MHz
UW-SC/CP-SC
block length
512 256
UW/CP length B� 128 64
Data modulation QPSK QPSK
Used packet length 0.38 ms 3.5 ms
No. of targets 3 3
Target ranges uniformly
distributed in
[0, 10] m
uniformly
distributed in
[0, 175] m
Target speeds uniformly
distributed in
[-120, 120] m/s
uniformly
distributed in
[-110, 110] m/s
Relative powers [0, -10, -20] dB [0, -10, -20] dB
� 8 16
Based on the settings and the discussions in Section IV.D, we
calculate the average range estimation absolute error to be 0.02
m and 0.78 m, respectively for the IEEE 802.11ad and self-
defined waveform, at the noise-free case. The average speed
detection absolute error should be 0.20 m/s and 0.11 m/s,
respectively for the IEEE 802.11ad and self-defined waveform,
at the noise-free case.
In the following, we use the average absolute error and
cumulative distribution function (CDF) for the strongest target
to evaluate the estimation performances of all methods. We will
see that the proposed methods achieve the theoretical
estimation performances shown above at much lower SNR
levels than the channel estimation based method. Performances
and comparisons with ML and channel estimation based
method will be discussed in detail in the following subsections.
A. Target detection performance
As an example to evaluate the CFAR detection (Section V)
performance based on different RDMs, here we consider
detecting the existence of target in the whole cell [0, B − 1] ×
[0, A( − 1]. We will compare the performances of the FCCR
and the channel estimation based method, where the number of
Monte Carlo trails is 1000000 (large number of runs is needed
to cater for the low Pfa). As the running time for the ML method
is prohibitive long, we do not include the ML method in this
comparison. The probability of detection at given Pfa versus
SNR is shown in Figure 3. The receiver operating characteristic
(ROC) curve is shown in Figure 4. Obviously, the proposed
FCCR method is substantially better than the channel
estimation based method.
Fig. 3. Probability of detection versus SNR
Fig. 4. Receiver operating characteristic (ROC) curve
B. Compare FCCR and ML on estimation accuracy
To compare FCCR with ML (minimizing cost function
equation (23) with known ℎi), we have done simulations based
on the 802.11ad waveform and the self-defined waveform. As
the ML method runs very slowly, we only use packet length of
0.013ms for the 802.11ad waveform with � = 2. For the same
reason, for the self-defined waveform, we choose a short packet
length of 0.9 ms and � = 2. To have a fair comparison, we have
chosen the number of searching points for FCCR and ML to be
the same. The comparisons of the two methods are shown in
Fig. 5 and Fig. 6, respectively. We see that FCCR achieves
almost the same performance as ML.

9
Fig. 5. Performance comparison of FCCR and ML (IEEE 802.11ad SC waveform)
Fig. 6. Performance comparison of FCCR and ML (self-defined waveform)
C. Compare FCCR and channel estimation based method
Now we compare the channel estimation based method
(channel est) and the proposed FCCR method. The minimum
mean square error (MMSE) algorithm [16, 17] is used for the
frequency domain channel estimation. After the MMSE
estimation, the limited length of the time domain channel (the
channel length is less than the CP length) is also used to boost
the channel estimation accuracy as follows. We turn the
estimated frequency channel into time domain by FFT and set
zeros to the taps with indices larger than the CP length. Then
we transform the time domain channel back to frequency
domain channel by an inverse FFT. Here we assume that the
transmitter and radar receiver are well isolated without
significant self-interference. The radar detection performances
for the first target are shown in Fig. 7 and Fig. 8 (respectively
for the 802.11ad waveform and the self-defined waveform) for
channel estimation based method and FCCR. Obviously,
FCCR is much more robust to the noise and has higher range
and speed accuracies. This is true at other parameters as well.
Thus in the following, to save space, we will not consider the
channel estimation based method any more.
D. Compare FCCR and separated range-speed method
Next, we compare FCCR and the separated range-speed
method (Section IV.C). The average absolute errors are shown
in Fig. 9 with the same settings as those in Fig. 7. It is no wonder
that FCCR is much better than the separated method at low
SNR, as FCCR is an approximation to the ML. However, the
separated method reduces the memory size to only 1/8 of that
for FCCR. The cumulative distribution function (CDF) of the
absolute range and speed errors are shown in Fig. 10 and Fig.
11 respectively for SNR=-34dB and SNR=-20dB. At -34dB
SNR, the range error of separated method still has about 10%
chance to exceed the bound �56
�= 0.04 m, while that of FCCR
is always within the bound. The speed errors of both methods
have certain chances to exceed the bound �
��5= 0.41 m/s. At -
20dB SNR, the estimation errors of both methods are within the
bounds. Note that, due to the limited sampling rate, the
estimated range error is not continuous.
E. Performances at different levels of self-interference
To test the robustness of the FCCR method to the self-
interference, we have done simulations with different self-
interference strengths. The estimation performances are shown
in Fig. 12 respectively for interferences free (-int0), 20dB
interference (-int20dB) and 50dB interference (-int50dB),
where the ranges of the targets are in the interval [0.5, 10] m.
As the self-interference is assumed at range 0, its impact to the
real targets which is at least 0.5 meters away is not significant,
when the interference strength is less than 20dB. However, if
the interference strength is too strong, the impact can be
significant. In fact, as shown in the figure, with the interference
power increased to 50 dB, the estimation performance has
become completely unreliable at short range targets.
Fig. 7. Performance comparison of FCCR and channel estimation based method (IEEE 802.11ad SC waveform)

10
Fig. 8. Performance comparison of FCCR and channel estimation based method (self-defined waveform)
Fig. 9. Performance comparison of FCCR and separated method (IEEE 802.11ad SC waveform)
Fig. 10. CDF of the absolute erors (SNR=-34dB)
Fig. 11. CDF of the absolute erors (SNR=-20dB)
Fig. 12. Detection performances with different interference levels (IEEE 802.11ad SC waveform)
For the self-defined waveform, the radar detection
performances for interference free and 30dB interference are
shown in Fig. 13 with FCCR method, where the ranges of the
targets are in the interval [3.1, 175] m. With 30 dB self-
interference, the range detection performances only degrade
slightly (about 2dB degrade), while the speed detection
performances degraded considerably. However, further
increasing the interference power will make the detection
completely unreliable for short range targets.

11
Fig. 13. Detection performances with different interferences (self-defined waveform)
VII. CONCLUSION AND FUTURE RESEARCH
In this paper, a low complexity method called “Fast Cyclic
Correlation Radar” (FCCR) is proposed for joint range and
speed detection/estimation. The algorithm is derived from the
ML principle. The method produces a RDM by cyclic
correlation at each block and then FFT along the blocks. Based
on the RDM, existing CFAR detection algorithms can be
readily used for target range and speed detection. The
performance of the FCCR is compared with the channel
estimation based method and ML method through extensive
simulations, which shows that FCCR is substantially better than
the channel estimation based method and has almost the same
performance as the ML method.
Future research topics include: (1) self-interference
avoidance/cancellation in both analog and digital domain; (2)
efficient implementation based on software defined radio [5].
REFERENCES
[1] T. Winchcomb, S. Massey and P. Beastall, “Review of latest developments in the Internet of Things”, Ofcom, 2017.
[2] L. Chen et al., “Robustness, Security and Privacy in Location-Based Services for Future IoT:A Survey”, IEEE Access, pp. 8956-8977, 2017.
[3] Greg Kregoski, “FMCW Radar in Automotive Applications: Technology Overview & Testing”, Rohde & Schwarz, 2016.
[4] B. P. Ginsburg et al., “A Multimode 76-81GHz Automotive Radar Transceiver with Autonomous Monitoring,” 2018 International Solid States Circuits Conference – ISSCC, San Francisco, CA, 2018.
[5] J. L. Kernec and O. Romain, “Performances of Multitones for Ultra-Wideband Software-Defined Radar”, IEEE Access, Vol. 5, pp. 6570-6588, May 2017.
[6] C. Sturm and W. Wiesbeck, “Waveform design and signal processing aspects for fusion of wireless communications and radar sensing,” Proceedings of the IEEE, vol. 99, no. 7, pp. 1236–1259, 2011.
[7] L. Han and K. Wu, “Joint wireless communication and radar sensing systems–state of the art and future prospects,” IET Microwaves, Antennas & Propagation, vol. 7, no. 11, pp. 876–885, 2013.
[8] M. Braun, C. Sturm, and F. K. Jondral, “Maximum likelihood speed and distance estimation for OFDM radar,” in Proc. IEEE 2010 Radar Conf., Washington, DC, May 2010.
[9] C. R. Berger et al., “Signal processing for passive radar using OFDM waveforms,” IEEE Journal of Selected Topics in Signal Processing, vol. 4, no. 1, pp. 226–238, 2010.
[10] M. Braun, “OFDM Radar Algorithms in Mobile Communication Networks,” Ph. D thesis, 2014.
[11] Y. H. Zeng, Y. G. Ma, and S. M. Sun, “Joint Radar-Communication: Low Complexity Algorithm and Self-interference Cancellation”, IEEE Globecom, Dec. 2018.
[12] P. Kumari, J. Choi, N. Gonzalez-Prelcic, and R. W. Heath Jr, “IEEE 802.11ad-based Radar: An Approach to Joint Vehicular Communication-Radar System”, IEEE Trans. Vehicular Tech., vol. 67, no. 4, pp. 3012-3027, 2018.
[13] E. R. Yeh, R. C. Daniels, and R. W. Heath, “Forward Collision Vehicular Radar with IEEE 802.11: Feasibility Demonstration through Measurements”, IEEE Trans. Vehicular Tech., vol. 67, no. 2, pp. 1404 - 1416, 2018.
[14] J. Louveaux, L. Vandendorpe, and T. Sartenaer, “Cyclic prefixed single carrier and multicarrier transmission: bit rate comparison,” IEEE Commun. Lett., vol. 7, no. 4, pp. 180–182, 2003.
[15] N. Benvenuto et al., “Single carrier modulation with nonlinear frequency domain equalization: An idea whose time has comeagain,” Proceedings of the IEEE, vol. 98, no. 1, pp. 69–96, 2010.
[16] T. Hwang, C. Yang, G. Wu, S. Li, and G. Y. Li, “OFDM and Its Wireless Applications: A Survey,” IEEE Transactions on Vehicular Technology, vol. 58, no. 4, pp. 1673-1694, May 2009.
[17] Y. Shen and E. Martinez, “Channel Estimation in OFDM Systems”, Freescale Semiconductor, Inc., 2006.
[18] Y. H. Zeng, C. L. Xu and Y. C. Liang, “Semi-Blind Channel Estimation For Linearly Precoded MIMO-CPSC”, IEEE ICC, 2008.
[19] J. Coon et al., “Channel and Noise Variance Estimation and Tracking Algorithms for Unique-Word Based Single-Carrier Systems,” IEEE Trans. Wireless Comm., Vol. 5, no. 6, pp. 1488-1496, 2006.
[20] L. Deneire, B. Gyselinckx, and M. Engels, “Training sequence versus cyclic prefix—A new look on single carrier communication,” IEEE Commun. Lett., vol. 5, no. 7, pp. 292–294, Jul. 2001.
[21] Y. H. Zeng and T. S. Ng, “Pilot cyclic prefixed single carrier communication: channel estimation and equalization,” IEEE Signal Processing Letters, vol. 12, no. 1, pp. 56–59, 2005.
[22] B. Muquetet et al., “Cyclic prefixing or zero padding for wireless multicarrier transmissions,” IEEE Trans. Comm., vol. 50, no. 12, pp. 2136–2148, 2002.
[23] European Telecommunications Standards Institute (ETSI), “Physical layer procedures (Release 14),” 3GPP TS 36.213, V14.2.0, April 2017.
[24] P. Banelli, S. Buzzi, G. Colavolpe, A. Modenini, F. Rusek, and A. Ugolini, “Modulation Formats and Waveforms for 5G Networks: Who Will Be the Heir of OFDM?” IEEE Signal Processing Mag., vol. 31, no. 6, pp. 80–93, Nov. 2014.
[25] X. Zhang, L. Chen, J. Qiu, and J. Abdoli, “On the Waveform for 5G”, IEEE Communications Magazine, pp. 74-80, Nov. 2016
[26] D. Rife and R. Boorstyn, “Single tone parameter estimation from discrete time observations,” Information Theory, IEEE Transactions on, vol. 20, no. 5, pp. 591–598, Sep 1974.
[27] IEEE Std. 802.11ad, "IEEE standard for local and metropolitan area networks: enhancements for very high throughput in the 60 GHz band," 2012.
[28] R. O. Schmidt, “Multiple emitter location and signal parameter estimation,” IEEE Trans. Antennas Propag., vol. 34, no. 3, pp. 276–280, Mar. 1986.

12
[29] Y. L. Sit, C. Sturm, J. Baier, T. Zwick, “Direction of Arrival Estimation using the MUSIC algorithm for a MIMO OFDM Radar”, IEEE Radar Conf., 2012.
[30] P. Kaczmarek and J. PietrasiĔski, “A method for eliminating signals from false targets in MUSIC based GPR range profile”, 17th International Radar Symposium (IRS), 2016.
[31] A. S. Turk, A. Kizilay, M. Orhan, A. Caliskan, “High resolution signal processing techniques for millimeter wave short range surveillance radar”, 17th International Radar Symposium (IRS), 2016.
[32] J. Ender, “A brief review of compressive sensing applied to radar”, In Proc. 14th Int. Radar Symp., pp. 3–16, vol. 1, Jun. 2013.
[33] Y. Yu, A. P. Petropulu, and H. V. Poor, “MIMO Radar Using Compressive Sampling.” IEEE Journal of Selected Topics in Signal Processing, vol. 4, no. 1, Feb. 2010.
[34] S. Salari et al., “Joint DOA and Clutter Covariance Matrix Estimation in Compressive Sensing MIMO Radar”, IEEE Trans. on Aerospace and Electronic Systems, vol. 55, no. 1, pp. 318-331, Feb. 2019.
[35] Y. Chi and M. F. D. Costa, “Harnessing Sparsity over the Continuum: Atomic Norm Minimization for Super Resolution”, arXiv:1904.04283v1 [eess.SP], 8 Apr 2019.
[36] Y. Chi, L. L. Scharf, A. Pezeshki, and A. R. Calderbank, “Sensitivity to basis mismatch in compressed sensing,” IEEE Transactions on Signal Processing, vol. 59, no. 5, pp. 2182–2195, 2011.
[37] M. Kronauge and H. Rohling, “Fast Two-Dimensional CFAR Procedure”, IEEE Trans. on Aerospace and Electronic Systems, vol. 49, no. 3, pp. 1817-1823, 2013.
[38] X. Zhang et al., “Intelligent CFAR Detector for Non-homogeneous Weibull Clutter Environment based on Skewness”, IEEE Radar Conf., pp.322-326, 2018.